Общая область техники
Настоящее изобретение относится к системам автоматизированного проектирования при помощи компьютера.
В частности, изобретение касается способа моделирования лопасти винта.
Уровень техники
Двигатели с «некапотированными» вентиляторами (или турбовинтовые двигатели типа "Propfan" или "Open rotor") представляют собой газотурбинный двигатель, вентилятор которого закреплен за пределами картера в отличие от классических турбореактивных двигателей (типа "Turbofan"), в которых вентилятор закрыт обтекателем.
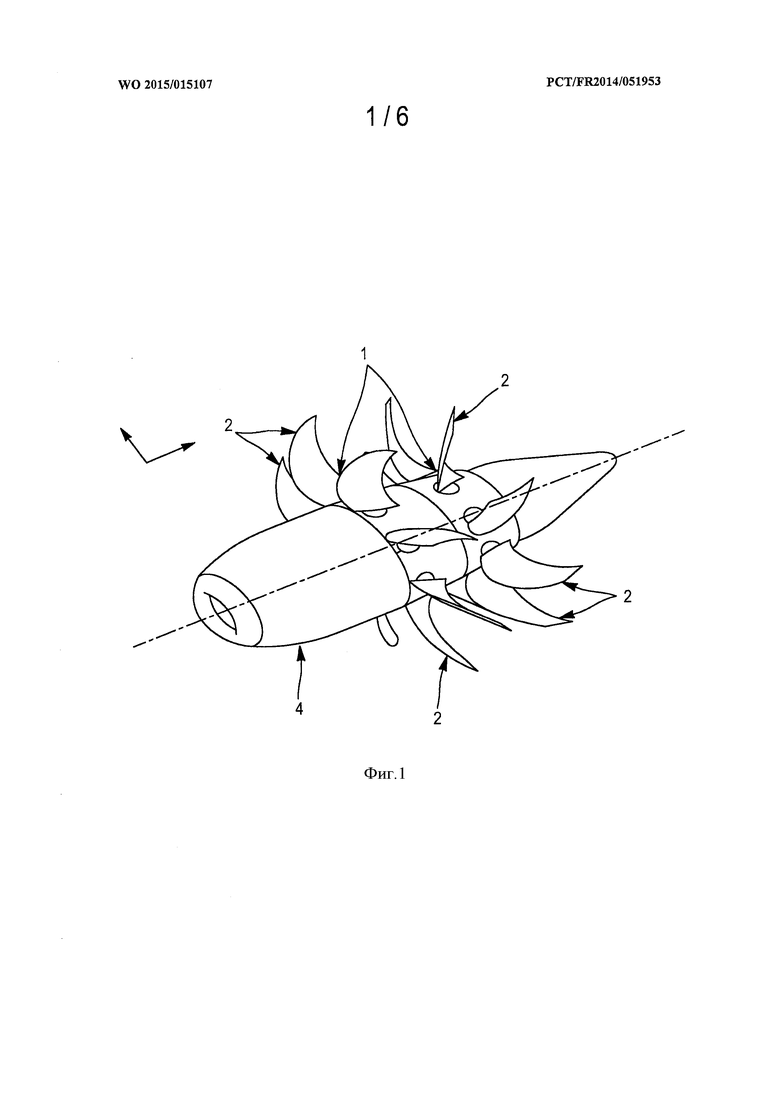
Известен также "Contra-Rotating Open Rotor" (CROR - открытый ротор противоположного вращения), показанный на фиг. 1, который оборудован двумя винтами, вращающимися в противоположных направлениях. Он представляет большой интерес с учетом его исключительно высокого КПД тяги.
Целью применения двигателя этого типа является обеспечение таких же скорости и характеристик, как у турбореактивного двигателя, при сохранении расхода топлива, характерного для турбовинтового двигателя. Действительно, отсутствие обтекателя вокруг вентилятора позволяет увеличить диаметр и расход воздуха, необходимого для тяги.
Однако отсутствие обтекателя создает проблемы соблюдения сертификационных требований, в частности, с точки зрения акустики, так как двигатель этого типа производит больше шума, чем классический двигатель. Действительно, создание тяги на каждой лопасти винта связано с распределением циркуляции по всему размаху винтов. Эта циркуляция выходит естественным образом в вершине лопасти (вместо выхода через картер), создавая так называемый «концевой» вихрь.
Взаимодействие этого концевого вихря в вершине передней лопасти с вращающимися поверхностями выходного винта создает реальную проблему в плане акустики, поскольку создаваемый сильный шум не блокируется никаким картером.
Современные нормы предписывают максимальный шумовой порог в зонах вблизи земли, то есть во время взлета или захода на посадку, который не могут обеспечить применяемые в настоящее время геометрические формы.
Желательно улучшить эти геометрические формы, в частности, на уровне вершин лопастей, чтобы уменьшить создаваемый шум, существенно не затрагивая при этом ни эффективность двигателя, ни расход топлива.
Для этого известны многие компьютерные инструменты моделирования лопастей или других авиационных деталей, которые позволяют проектировать эти детали с автоматической оптимизацией некоторых из их характеристик. Принцип состоит в определении аэромеханического геометрического оптимума закономерностей лопасти, то есть одной или нескольких кривых, описывающих значение физической величины (такой как аэродинамическое качество, повышение давления, производительность или граница помпажа) вдоль сечения или высоты лопасти в данной окружающей среде, посредством большого числа вычислений моделирования.
Однако в настоящее время для проектирования капотированных вентиляторов применяют те же способы, что и для некапотированных винтов, то есть моделирование двухмерных профилей, которые заворачивают затем по линиям тока (с соблюдением углов профиля) и наслаивают в соответствии с выбранной и оптимизированной закономерностью наслаивания.
Такие решения подходят для многих физических величин некапотированных винтов, но пока все еще трудно добиться существенного улучшения уровней шума.
Альтернативно можно использовать алгоритмы деформации сетки. Такие методы можно предусматривать, так как они имеют много преимуществ с точки зрения чистоты поверхности и легкости построения. Однако на сегодняшний день они требуют большой доработки, чтобы их можно было применять в промышленном масштабе.
Таким образом, существует необходимость в инновационном методе моделирования некапотированного винта, который обеспечивает существенное улучшение его аэроакустических характеристик, будучи при этом экономичным с точки зрения использования компьютерных ресурсов.
Сущность изобретения
Первым объектом настоящего изобретения является способ моделирования по меньшей мере части лопасти некапотированного винта, при этом часть лопасти имеет законцовку, при этом способ включает в себя следующие этапы выполнения при помощи средств обработки данных устройства:
(а) параметризация по меньшей мере одной кривой Безье, отображающей деформацию указанной лопасти, характеризующую законцовку, в зависимости от положения вдоль сечения на данной высоте в лопасти, при этом кривую определяют:
a. первая и вторая экстремальные контрольные точки, определяющие протяженность указанного сечения лопасти;
b. по меньшей мере одна промежуточная контрольная точка, расположенная между экстремальными точками,
при этом параметризацию осуществляют по меньшей мере по одному параметру деформации и указанной высоте сечения в лопасти, в зависимости от которых выражают абсциссу промежуточной контрольной точки и ординату второй экстремальной точки;
(b) определение оптимизированных значений параметра или параметров деформации;
(c) воспроизведение на интерфейсе указанного устройства определенных таким образом значений.
Согласно другим предпочтительным, но не ограничительным признакам:
- параметрами деформации являются относительная высота начала деформации h0 и максимальная законцовка dmax на конце лопасти, при этом по меньшей мере одну параметризованную кривую Безье связывают с относительной высотой h сечения в лопасти, h∈[h0,1];
- ординату уК второй экстремальной контрольной точки получают через выражение 
- абсцисса xi указанной по меньшей мере одной промежуточной контрольной точки пропорциональна 
- К≥4, при этом промежуточная контрольная точка или i-ые промежуточные контрольные точки, при  , являются подвижными точками, абсцисса которых является функцией высоты указанного сечения в лопасти, при этом К-2-ая промежуточная контрольная точка является неподвижной;
, являются подвижными точками, абсцисса которых является функцией высоты указанного сечения в лопасти, при этом К-2-ая промежуточная контрольная точка является неподвижной;
- абсциссу xi К-3 подвижных промежуточных контрольных точек получают при помощи выражения  где хК-1 является абсциссой неподвижной промежуточной контрольной точки (PCUК-1);
где хК-1 является абсциссой неподвижной промежуточной контрольной точки (PCUК-1);
- хК-1=0,75;
- К=7, чтобы иметь 4 подвижные промежуточные контрольные точки;
- ордината первой экстремальной точки и каждой промежуточной контрольной точки равна нулю;
- производная кривой Безье на уровне первой экстремальной контрольной точки равна нулю;
- на этапе (а) производят параметризацию множества кривых Безье, соответствующих сечениям на разных высотах в лопасти;
- оптимизированные значения, определенные на этапе (b), являются значениями параметров деформации, при которых интенсивность концевого вихря, создаваемого лопастью, является минимальной.
Вторым, а затем и третьим объектами изобретения являются способ изготовления лопасти некапотированного винта, при этом лопасть имеет законцовку, при этом способ содержит следующие этапы:
- осуществление способа, являющегося первым объектом, с целью моделирования по меньшей мере части лопасти;
- изготовление указанной лопасти в соответствии с моделированием указанной полученной по меньшей мере части лопасти;
а также некапотированный винт, содержащий множество лопастей, полученных при помощи способа, являющегося вторым объектом.
Четвертым объектом изобретения является устройство моделирования по меньшей мере части лопасти некапотированного винта, при этом часть лопасти имеет законцовку, при этом устройство отличается тем, что содержит средства обработки данных, включающие в себя:
- модуль параметризации по меньшей мере одной кривой Безье, отображающей деформацию указанной лопасти, характеризующую законцовку, в зависимости от положения вдоль сечения на данной высоте в лопасти, при этом кривую определяют:
a. первая и вторая экстремальные контрольные точки, определяющие протяженность указанного сечения лопасти;
b. по меньшей мере одна промежуточная контрольная точка, расположенная между экстремальными точками,
при этом параметризацию осуществляют по меньшей мере по одному параметру деформации и указанной высоте сечения в лопасти, в зависимости от которых выражают абсциссу промежуточной контрольной точки и ординату второй экстремальной точки;
- модуль определения оптимизированных значений параметра или параметров деформации;
- модуль воспроизведения на интерфейсе указанного устройства определенных таким образом значений.
Пятым и шестым объектами изобретения являются соответственно компьютерный программный продукт, содержащий командные коды для исполнения являющегося первым объектом изобретения способа моделирования по меньшей мере части лопасти некапотированного винта; и машиночитаемое средство хранения информации, на котором записанный компьютерный программный продукт содержит командные коды для исполнения являющегося первым объектом изобретения способа моделирования по меньшей мере части лопасти некапотированного винта.
Краткое описание чертежей
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания предпочтительного варианта выполнения со ссылками на прилагаемые чертежи, на которых:
фиг. 1 (уже описана) - пример открытого ротора противоположного вращения, для лопаток которого применяют заявленный способ;
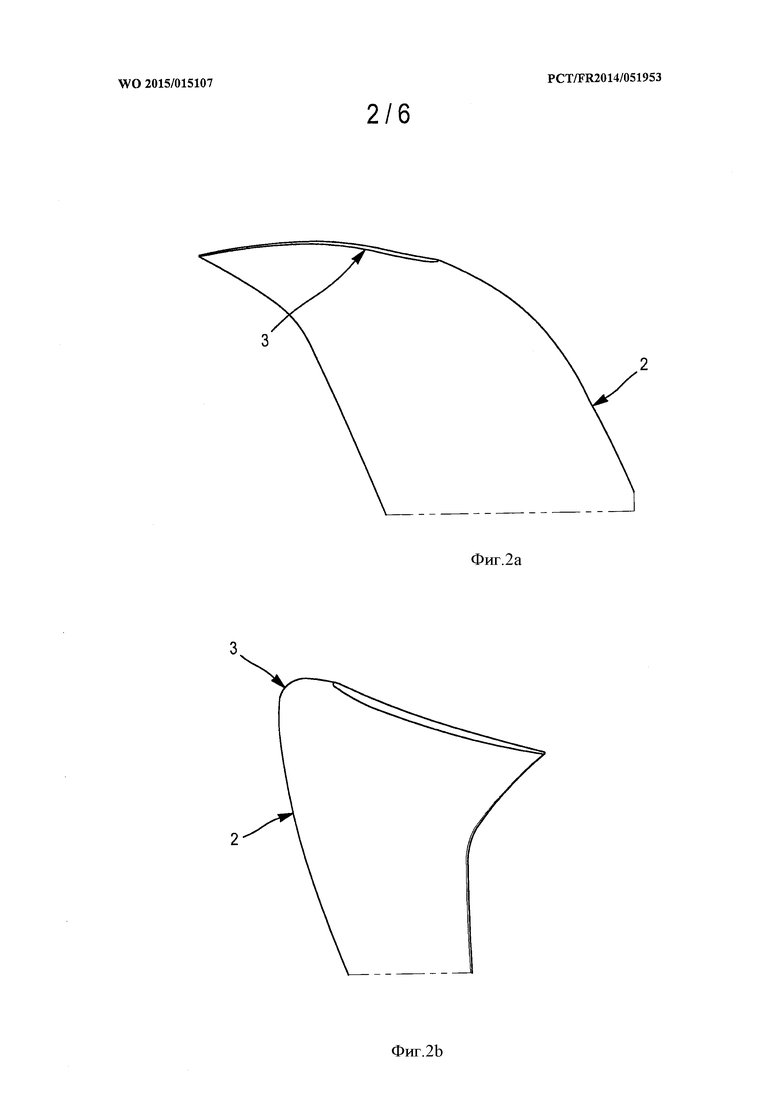
фиг. 2а-2b - два вида конца лопасти некапотированного винта такого ротора;
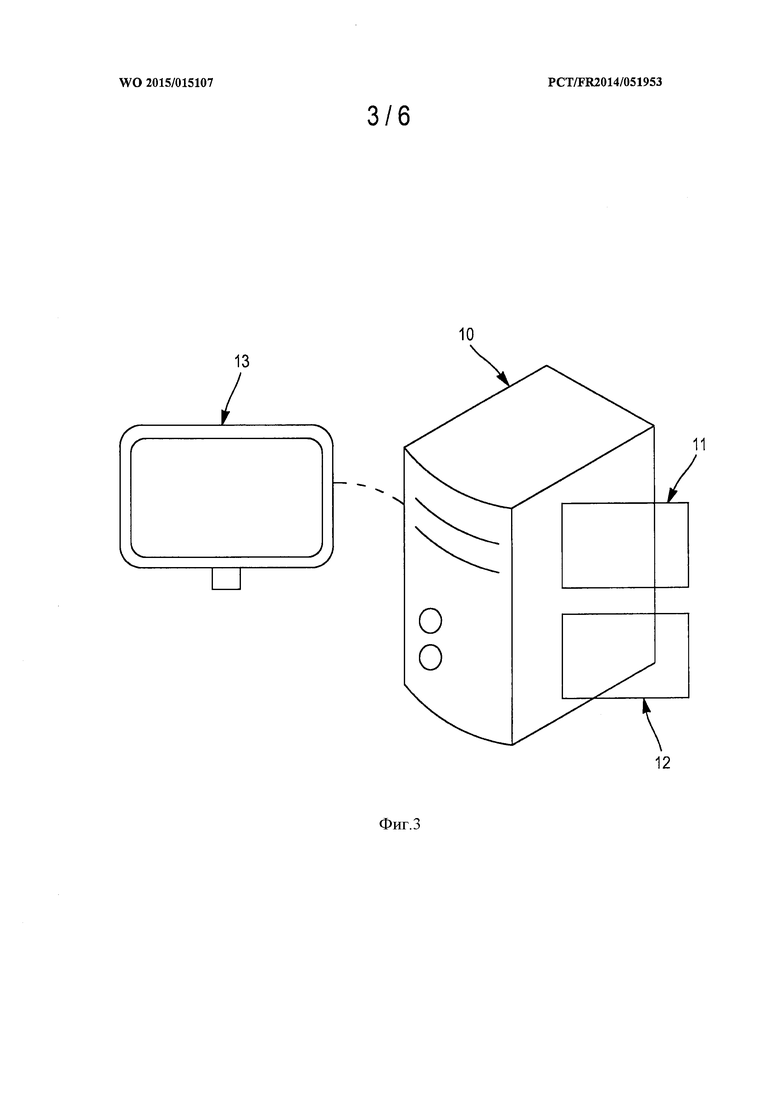
фиг. 3 - система для осуществления заявленного способа;
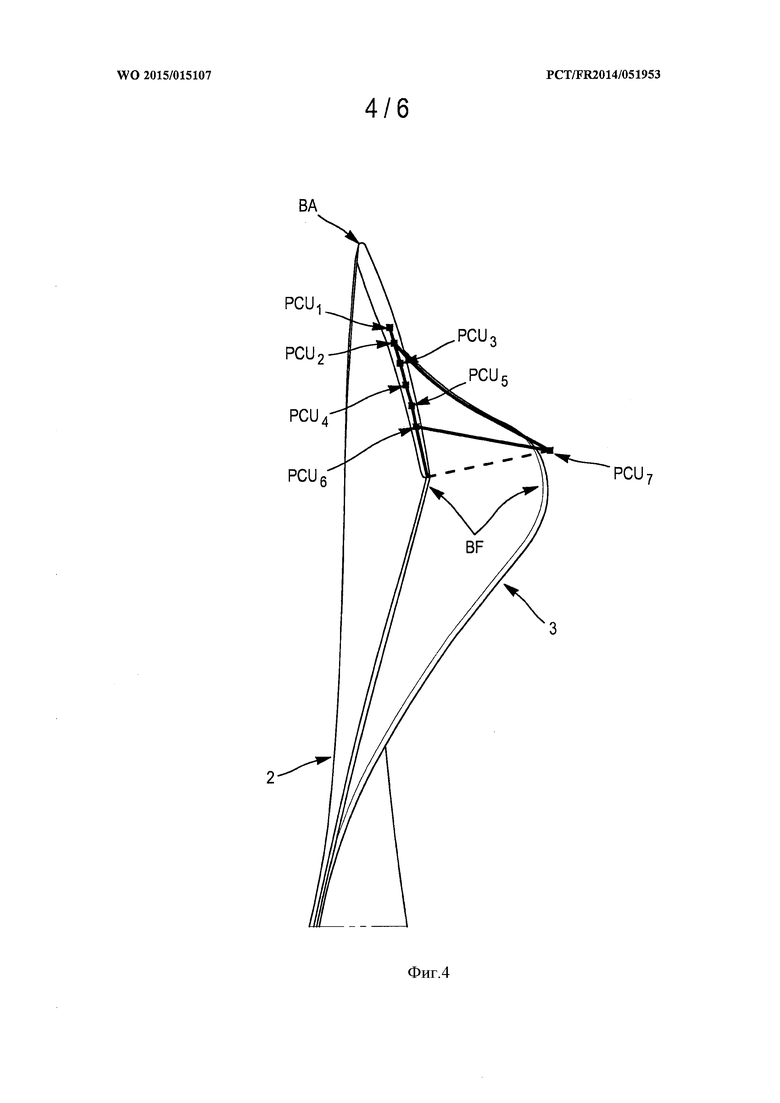
фиг. 4 - осуществление способа на лопасти некапотированного винта;
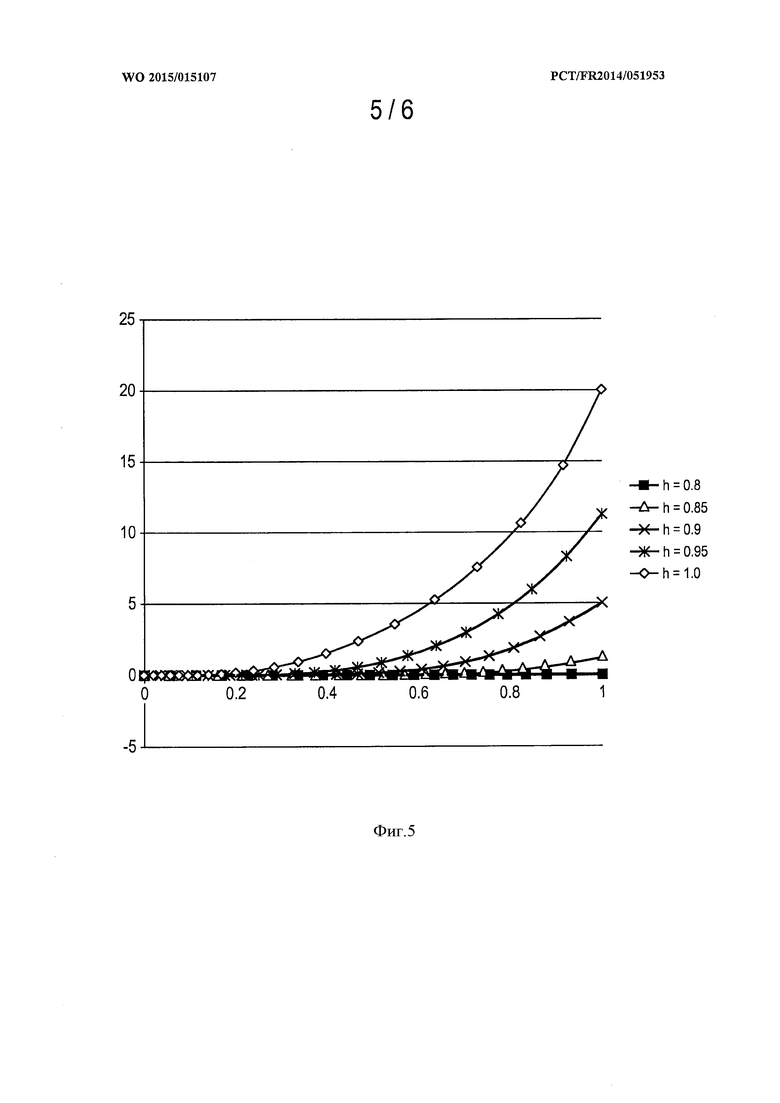
фиг. 5 - пример графика, на котором показаны кривые деформации лопасти согласно варианту осуществления заявленного способа;
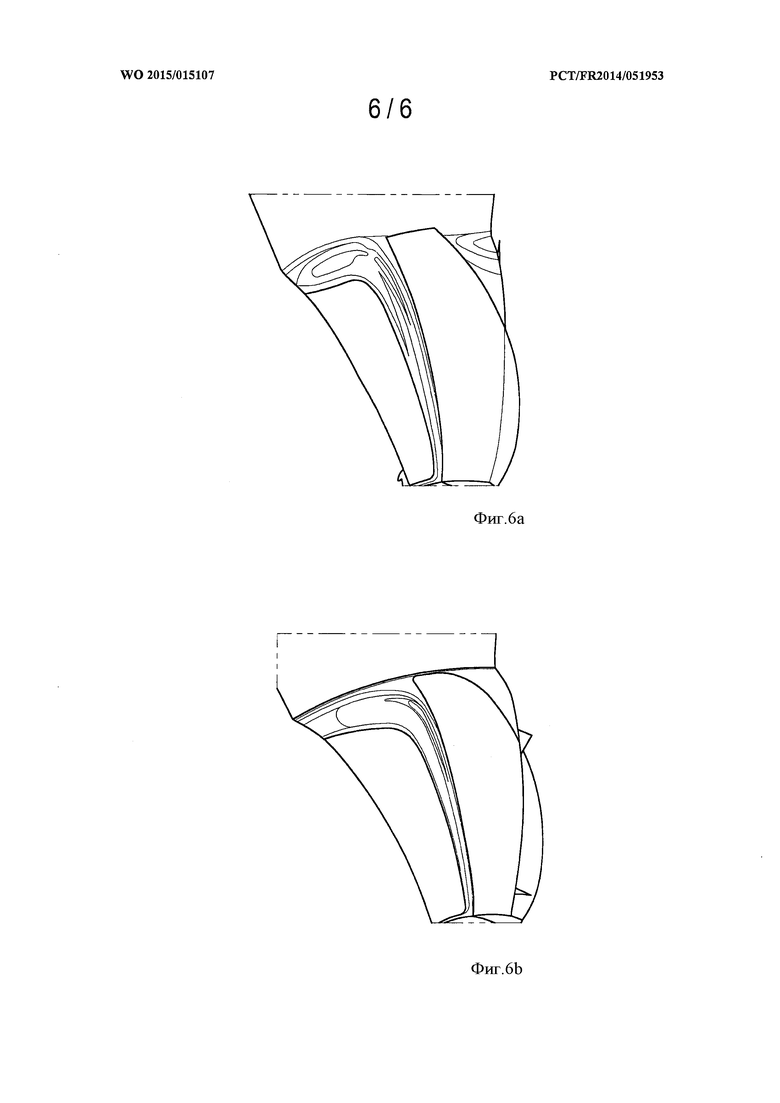
фиг. 6а-6b - примеры, позволяющие сравнить аэроакустические характеристики известной лопасти и лопасти, смоделированной при помощи заявленного способа.
Осуществление изобретения Законцовка лопасти
Показанный на фиг. 1 открытый ротор содержит турбину 4 и два некапотированных винта 1. Каждый винт 1 содержит множество лопастей 2, расположенных в радиальном направлении, начиная от картера ротора.
На фиг. 2а и 2b детально показана вершина лопасти 2. Эта вершина имеет законцовку 3, иначе говоря, систему типа «Винглет». Речь идет о сильном изгибе, который иногда доходит до формы ортогонального крылышка (случай законцовок на конце крыла). Такая система позволяет проектировать в вершине лопасти 2 разгруженные профили (Cz=0) и даже профили, отрицательно нагруженные за счет перемены местами корытца и спинки.
Благодаря такой законцовке 3, можно ожидать лучшего рассеяния концевых вихрей, производимых на конце лопасти 2. Однако до настоящего времени не представлялось возможности получить геометрию вершины лопасти 2, которая выполняла бы эту задачу до такой степени, чтобы уменьшить создаваемый шум.
Настоящий способ предназначен для специального моделирования по меньшей мере части лопасти 2 (в частности, ее вершины) некапотированного винта 1, при этом часть лопасти 2 имеет тангенциальную законцовку 3. Идея состоит в том, чтобы образовать законцовку 3 как деформацию «скелета» лопасти 2 относительно контрольной плоскости, причем на основании очень специфических параметров, которые будут описаны ниже.
В разрезе (то есть в поперечном сечении) лопасти 2 скелет представляет собой среднюю линию, которая проходит от передней кромки ВА до задней кромки BF. На фиг. 4 представлена эта же лопасть 2 в двух конфигурациях: исходной (то есть без законцовки 3, при этом скелет имеет вид прямой линии) и деформированной (то есть с перемещением задней кромки таким образом, чтобы получить изогнутую форму скелета, характеризующую законцовку 3). Эта фиг. 4 будет более подробно описана ниже. Скелет не следует путать с хордой, которая тоже соединяет переднюю и заднюю кромки, но проходит при этом через огибающую лопасти 2.
Ортогонально к сечению расположена «высота» лопасти 2, то есть положение вдоль продольной оси. Каждое сечение лопасти 2 находится в лопасти 2 на данной высоте.
Часть лопасти 2 моделируют во время ее проектирования при помощи компьютерного устройства 10, показанного на фиг. 3. Оно содержит средства 11 обработки данных (один или несколько процессоров), средства 12 хранения данных (например, один или несколько жестких дисков), средства интерфейса 13 (представляющие собой средства ввода, такие как клавиатура и мышь или сенсорный интерфейс, и средства воспроизведения, такие как экран для выведения результатов). Предпочтительно устройство 10 представляет собой суперкомпьютер, но понятно, что вполне возможно осуществлять способ на самых разных платформах.
Несмотря на то, что рассеяние вихрей является главным критерием, выбранным для оптимизации во время моделирования лопасти, понятно, что можно выбирать и другие критерии. Например, можно попробовать максимизировать механические свойства, такие как стойкость к механическим напряжениям, частотные характеристики лопатки, перемещения лопасти, аэродинамические свойства, такие как аэродинамическое качество, повышение давления, пропускная способность или граница помпажа и т.д.
Параметризация
Необходимо произвести параметризацию закономерности деформации скелета, которую необходимо оптимизировать, то есть сделать из нее функцию N входных параметров. При этом оптимизация состоит в варьировании (как правило, произвольном) этих различных параметров под напряжением вплоть до определения их оптимальных значений для заранее определенного критерия рассеяния вихрей. Затем получают «сглаженную» кривую путем интерполяции на основании определенных опорных точек.
При этом количество необходимых вычислений напрямую (линейно и даже экспоненциально) связано с числом входных параметров задачи.
Существует много различных методов параметризации закономерности, в частности, среди них можно выделить две большие категории:
- дискретная модель: закономерность определяют по положению множества точек (на практике 5-10 для закономерности по высоте, и 50-200 для сечения), поочередно перемещаемых во время оптимизации;
- параметрическая модель: закономерность определяют при помощи математических кривых, известных в литературе как кривые Безье или кривые NURBS (неоднородные рациональные В-сплайны).
Желательно использовать большое число параметров, чтобы соответственно повысить качество закономерности (это является главной задачей при проектировании лопастей), однако такой прием оказывается сразу же ограниченным мощностью и ресурсами современных процессоров.
Даже при применении дорогих суперкомпьютеров время, необходимое для моделирования одной закономерности, является соответственно большим.
Кроме того, в присутствии большого числа параметров появляются проблемы: действительно, определенные закономерности имеют большое число опорных точек, которые необходимо соблюдать, и первые полученные кривые характеризуются ненормальной «осцилляцией» (это называют явлением Рунге), поэтому их невозможно использовать в таком состоянии. Необходимо их преобразовать таким образом, чтобы они стали в достаточной степени гладкими, что еще больше увеличивает время, необходимое для получения результатов.
Как будет показано ниже, настоящий способ обеспечивает отличное качество моделирования вершины лопасти 2 и при удивительно малом количестве параметров позволяет добиться существенного улучшения рассеяния концевых вихрей (и следовательно, уровня шума).
На этапе (а) при помощи средств 11 обработки данных под управлением оператора производят параметризацию кривой, характеризующей значение деформации лопасти 2 (то есть, как было указано выше, законцовку 3) в зависимости от положения вдоль сечения лопасти 2 некапотированного винта 1 на данной высоте в лопасти 2. Под «сечением» следует понимать также «часть сечения», то есть все или часть пространства между передней кромкой ВА и задней кромкой BF.
Предпочтительно положение вдоль кривой выражают в зависимости от длины скелета (по абсциссе) и, в частности, от «нормализованной» длины скелета, то есть выраженной от 0 до 1, если пересекать лопасть 2 от одной кромки к другой. Иначе говоря, это соответствует координате х, которую имела бы точка скелета в ортонормированной системе координат, в которой точка ВА имела бы координаты (0,0), а точка BF - координаты (1,0). Например, точка сечения, соответствующая нормализованной длине скелета «0,5», находится на медиатрисе скелета. Следует отметить, что, поскольку кривая может проходить только на части (непрерывной) сечения лопасти 2, соответствующую функцию определяют в подынтервале [0,1].
Вместе с тем понятно, что изобретение ни в коем случае не ограничивается выражением кривой, отображающей значение деформации в зависимости от длины скелета, и что возможны и другие точки отсчета (например, длина хорды).
Эту кривую, отображающую значение деформации, следует понимать как моделирование закономерности деформации.
Эта кривая является кривой Безье. Эти кривые являются параметрическими полиномиальными кривыми, определяемые как комбинации из N+1 элементарных многочленов, называемых многочленами Бернштейна: кривую Безье определяют по совокупности точек  при этом
при этом  являются многочленами Бернштейна степени N.
являются многочленами Бернштейна степени N.
Точки {Р0, P1…PN} называются «имплицитными» контрольными точками кривой и представляют собой переменные, благодаря которым при помощи кривой Безье можно моделировать закономерность лопасти.
Эти точки называются «имплицитными», так как кривую Безье можно рассматривать как совокупность барицентров N+1 контрольных точек с весовым коэффициентом, равным значению многочлена Бернштейна, связанного с каждой контрольной точкой. Иначе говоря, эти точки действуют как локализованные точки, притягивающие кривую, которая, тем не менее, как правило, через них не проходит (кроме первой и последней точек, которые соответствуют t=0 и t=1, и некоторых случаев выравнивания точек в линию).
Как правило, в известных технологиях моделирования закономерности с использованием кривой Безье, экстремальные контрольные точки Р0 и PN кривой являются фиксированными (они определяют протяженность части детали, на которой будут производить моделирование), но другие точки {P1…PN-1} имеют подвижные координаты, образующие входные параметры для алгоритма оптимизации.
В рамках настоящего способа, как и в известных решениях, кривую определяют благодаря ее К контрольным точкам, при этом К≥3. Две экстремальные точки пользователя PCU1 и PCUK (i=1 и i=К) определяют протяженность части детали (то есть область определения кривой). Кроме того, в кривой Безье используют также по меньшей мере одну промежуточную контрольную точку пользователя PCUi,  , расположенную между этими двумя экстремальными точками PCU1 и PCUK.
, расположенную между этими двумя экстремальными точками PCU1 и PCUK.
Однако вторая экстремальная точка PCUK в данном случае является главной подвижной точкой. В частности, абсцисса по меньшей мере одной промежуточной контрольной точки PCUi (и даже всех, кроме одной, как будет показано ниже) и ордината второй экстремальной точки PCUK зависят от указанной высоты сечения в лопасти 2 и по меньшей мере от одного параметра деформации. Иначе говоря, параметризацию осуществляют в соответствии с этим параметром деформации и с высотой сечения в лопасти 2.
Идея состоит в скоординированном изменении скелета в вершине лопасти 2 на множестве сечений (деформация «распространяется») непрерывно в зависимости от их высоты в лопасти 2 и от параметра или параметров деформации. Иначе говоря, на этапе (а) осуществляют параметризацию множества кривых Безье, соответствующих сечениям на разных высотах в лопасти 2.
Параметры деформации и контрольные точки пользователя
Предпочтительно используют два параметра деформации:
- относительную высоту начала деформации h0; и
- максимальную законцовку dmax на конце лопасти 2.
h0 является относительной высотой, то есть «нормализованной» высотой, иначе говоря, выраженной от 0 до 1, если пересекать лопасть 2 от основания (соединения с диском винта 1) до конца вершины. Речь идет о высоте начала деформации, то есть законцовка 3 существует в интервале [h0, 1]. Таким образом, каждая параметризованная кривая Безье связана с относительной высотой h сечения в лопасти 2, где h∈[h0, 1] (поскольку при h∈[0, h0] деформации нет).
Максимальная законцовка соответствует максимальному значению деформации на всей законцовке 3, достигаемому на конце лопасти 2 на уровне задней кромки BF (как видно на фиг. 4, эта задняя кромка перемещается).
Эти два параметра деформации уже сами по себе позволяют параметрировать (с высотой h) все контрольные точки пользователя, образующие кривую моделирования Безье.
Для этого используют коэффициент  , который квадратично меняется от 0 до 1, когда h проходит через интервал [h0, 1].
, который квадратично меняется от 0 до 1, когда h проходит через интервал [h0, 1].
Ординату уk второй экстремальной контрольной точки PCUK получают через выражение  Что касается абсциссы хi промежуточной контрольной точки или промежуточных контрольных точек PCUi, то она пропорциональна
Что касается абсциссы хi промежуточной контрольной точки или промежуточных контрольных точек PCUi, то она пропорциональна 
Эта промежуточная контрольная точка PCUi является «подвижной» точкой, поскольку ее координаты зависят от высоты сечения. Если К≥4 (по меньшей мере 4 контрольные точки, из которых две являются промежуточными), можно предусмотреть «неподвижную» промежуточную контрольную точку, а именно К-2-ую промежуточную контрольную точку PCUK-1 (предпоследнюю контрольную точку).
Таким образом, i-ая или i-ые  промежуточные контрольные точки PCUi являются подвижными точками, абсцисса которых является функцией высоты указанного сечения в лопасти 2 (как было указано выше, пропорционально
промежуточные контрольные точки PCUi являются подвижными точками, абсцисса которых является функцией высоты указанного сечения в лопасти 2 (как было указано выше, пропорционально 
Как показано на описанной выше фиг. 4, предпочтительно ординату yi,  первой экстремальной контрольной точки PCUi выбирают неподвижной и равной нулю. Иначе говоря, эти К-1 первых контрольных точек находятся на одной линии и на первоначальном скелете. От него отстоит только вторая экстремальная контрольная точка PCUK.
первой экстремальной контрольной точки PCUi выбирают неподвижной и равной нулю. Иначе говоря, эти К-1 первых контрольных точек находятся на одной линии и на первоначальном скелете. От него отстоит только вторая экстремальная контрольная точка PCUK.
Как было указано выше, кривая Безье не проходит через промежуточные контрольные точки PCUi. Следовательно, это совмещение не создает никакой угловой точки для кривой Безье, а, наоборот, контролирует постепенность кривизны. В соответствии с дополнительным условием производную кривой Безье напрягают как нулевую на уровне первой экстремальной точки PCU1, так как обе первые контрольные точки имеют одинаковую ординату, равную нулю.
Что касается подвижных промежуточных контрольных точек PCUi, i∈[2, К-1], то они имеют переменную абсциссу, при которой они приближаются к первой экстремальной контрольной точке PCU1, когда значение увеличивается, иначе говоря, при приближении к верхнему концу лопасти 2. Таким образом, по мере подъема в лопасти 2 весовой коэффициент промежуточных контрольных точек все больше смещается к передней кромке ВА, увеличивая вогнутость кривизны кривой Безье, что приводит к увеличению деформируемой доли скелета (в основании законцовки 3 изогнута только небольшая зона на уровне задней кромки BF, тогда как законцовка 3 занимает всю ширину лопасти 2 в ее вершине).
Поскольку последняя промежуточная контрольная точка PCUK-1 является неподвижной, это позволяет независимо контролировать конечную кривизну законцовки. Следовательно, абсцисса этой точки может либо представлять собой дополнительный параметр, либо быть фиксированной, например, в значении хK-1=0,75.
Что касается абсцисс подвижных промежуточных контрольных точек, то их определяют таким образом, чтобы последние имели равномерные отклонения и зависели от положения неподвижной промежуточной контрольной точки PCUK-1.
В частности, если h=h0 (основание законцовки 3), последняя подвижная промежуточная контрольная точка совпадает с неподвижной промежуточной контрольной точкой, а если h=1 (конец лопасти 2), xrel=0 и все подвижные промежуточные контрольные точки имеют в качестве абсциссы 0 (то есть они совпадают с первой экстремальной контрольной точкой PCU1).
Например, абсциссы xi К-3 подвижных промежуточных контрольных точек PCUi получают при помощи выражения  где хK-1 является абсциссой вышеупомянутой неподвижной промежуточной контрольной точки PCUK-1.
где хK-1 является абсциссой вышеупомянутой неподвижной промежуточной контрольной точки PCUK-1.
Таким образом, в оптимальной ситуации (показанной на фиг. 4) при К=7, чтобы иметь 4 подвижные промежуточные контрольные точки (плюс неподвижную промежуточную точку и две экстремальные точки), координатами 7 точек является:
PCU1 (0; 0)
PCU2 (0.75*1*хrel/4; 0)
PCU3 (0.75*2*xrel/4; 0)
PCU4 (0.75*3*хrel/4; 0)
PCU5 (0.75*4*хrel/4; 0)
PCU6 (0.75; 0)
Пример
На фиг. 5 представлены кривые Безье, полученные для 5 относительных высот сечения, составляющих от 0,8 до 1. Соответствующими параметрами этой параметризации являются h0=0.8 и dmax=20 мм.
Отмечается постепенное увеличение одновременно амплитуды законцовки 3 и деформированной части скелета, когда высота увеличивается.
Оптимизация и воспроизведение
Второй этап (b) способа представляет собой этап определения при помощи средств 11 обработки данных оптимизированных (по возможности, оптимальных) значений указанного по меньшей мере одного параметра деформации (h0, dmax, а также возможно других, таких как xK-1). Речь идет об этапе оптимизации.
Специалисту известные многие методы для осуществления этого этапа, например, можно просто псевдослучайно менять выбранные переменные параметры, осуществляя при этом моделирование для определения этих оптимизированных значений (то есть значений, при которых выбранный критерий, в частности, уменьшение концевых вихрей, является максимизированным) параметров контрольных точек PCUi. Вместе с тем, изобретение не ограничено этой возможностью.
На последнем этапе (с) средства интерфейса 13 устройства 10 воспроизводят определенные значения параметра или параметров для их использования, например, путем выведения на экран кривой моделирования, в которой параметры установлены по этим оптимизированным значениям.
Альтернативно средства 13 интерфейса могут отображать только эти цифровые значения.
Тесты
На смоделированных таким образом лопастях 2 были проведены тесты, чтобы проверить, можно ли для данной лопасти существенно увеличить рассеяние концевых вихрей.
На фиг. 6а и 6b соответственно для классической лопасти и для лопасти 2, законцовка 3 которой была оптимизирована при помощи настоящего способа, показано завихрение (то есть интенсивность концевого вихря) на выходе входного некапотированного винта 1 открытого ротора, показанного на фиг. 1.
Отмечается уменьшение интенсивности примерно на 30%-40% от максимума завихрения. Отмечается также, что вихрь начинает появляться на слегка более низком радиусе для новой лопасти 2.
Таким образом, уже только одна оптимизация тангенциальной законцовки 3 четко показывает значительное изменение вихревой физики вершины лопасти винта как на высокой скорости (изменение траектории, центрифугирование), так и на низкой скорости (значительное уменьшение вихревой интенсивности и начало появления, смещенное по размаху).
Способ изготовления и винт
После моделирования можно изготовить лопасть 2. Таким образом, изобретением предложен способ изготовления лопасти 2 некапотированного винта 1, при этом лопасть 2 имеет законцовку 3, при этом способ содержит следующие этапы:
- Осуществление способа, являющегося первым объектом изобретения, для моделирования по меньшей мере части лопасти;
- Изготовление указанной лопасти 2 в соответствии с моделированием указанной по меньшей мере части полученной лопасти.
Таким образом, можно получить некапотированный винт 1, содержащий множество изготовленных таким образом лопастей 2. Каждая из этих лопастей имеет законцовку 3, обеспечивающую улучшение рассеяния концевых вихрей и, следовательно, уменьшение уровня шумов, но без снижения ее характеристик.
Устройство
Устройство 10 (показанное на фиг. 3) для осуществления способа моделирования по меньшей мере части лопасти 2 содержит средства 11 обработки данных, которые включают в себя:
- модуль параметризации по меньшей мере одной кривой Безье, отображающей деформацию указанной лопасти 2, характеризующую законцовку 3, в зависимости от положения вдоль сечения на данной высоте в лопасти 2, при этом кривую определяют:
a. первая и вторая экстремальные контрольные точки PCU1, PCUK, определяющие протяженность указанного сечения лопасти 2;
b. по меньшей мере одна промежуточная контрольная точка PCUi, , расположенная между экстремальными точками PCU1, PCUK,
при этом параметризацию осуществляют по меньшей мере по одному параметру деформации и указанной высоте сечения в лопасти 2, в зависимости от которых выражают абсциссу промежуточной контрольной точки PCUi и ординату второй экстремальной точки PCUK;
- модуль определения оптимизированных значений указанного по меньшей мере одного параметра деформации;
- модуль воспроизведения на интерфейсе 13 указанного устройства 10 определенных таким образом значений.
Компьютерный программный продукт
Другими объектами изобретения являются соответственно компьютерный программный продукт, содержащий командные коды для исполнения (на средствах 11 обработки данных, в частности, на средствах устройства 10) являющегося первым объектом изобретения способа моделирования по меньшей мере части лопасти 2 некапотированного винта 1, а также средство хранения информации, которое выполнено с возможностью считывания компьютерным устройством (например, память 12 этого устройства 10) и на котором записан указанный компьютерный программный продукт.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДЕЛИРОВАНИЯ ДЕТАЛИ, В ЧАСТНОСТИ ЛОПАТОЧНОГО КОЛЕСА | 2014 |
|
RU2665216C2 |
| СПОСОБ МОДЕЛИРОВАНИЯ НЕОСЕСИММЕТРИЧНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2670380C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЯ | 2013 |
|
RU2638883C2 |
| ДЕТАЛЬ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ С НЕОСЕСИММЕТРИЧНОЙ ПОВЕРХНОСТЬЮ | 2014 |
|
RU2672990C1 |
| ДЕТАЛЬ ИЛИ УЗЕЛ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СООТВЕТСТВУЮЩИЙ ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2014 |
|
RU2666933C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА И СПОСОБ ЭКСПЛУАТАЦИИ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2013 |
|
RU2617529C2 |
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ | 2011 |
|
RU2513355C2 |
| Способ определения остаточных напряжений в кольцевых деталях | 1989 |
|
SU1654646A2 |
| ДЕТАЛЬ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ С НЕОСЕСИММЕТРИЧНОЙ ПОВЕРХНОСТЬЮ | 2014 |
|
RU2675980C2 |
| АЭРОДИНАМИЧЕСКИЙ ПРОФИЛЬ НЕСУЩЕГО ЭЛЕМЕНТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2808865C1 |
Настоящее изобретение относится к способу моделирования по меньшей мере части лопасти (2) некапотированного винта (1), имеющей законцовку (3). Способ содержит этапы, выполняемые при помощи средств (11) обработки данных устройства (10): (а) параметризацию по меньшей мере одной кривой Безье, отображающей деформацию указанной лопасти (2), характеризующую законцовку (3), при этом кривую определяют: а. первая и вторая экстремальные контрольные точки (PCUi, PCUK), определяющие протяженность указанного сечения лопасти; b. по меньшей мере одна промежуточная контрольная точка  , расположенная между экстремальными точками (PCU1, PCUK), при этом параметризацию выполняют по меньшей мере по одному параметру деформации и указанной высоте сечения в лопасти (2), в зависимости от которых выражают абсциссу промежуточной контрольной точки (PCUi) и ординату второй экстремальной точки (PCUK); (b) определение оптимизированных значений параметра или параметров деформации; (с) воспроизведение на интерфейсе (13) указанного устройства (10) определенных таким образом значений. Обеспечивается улучшение аэроакустических характеристик винта. 4 н. и 11 з.п. ф-лы, 7 ил.
, расположенная между экстремальными точками (PCU1, PCUK), при этом параметризацию выполняют по меньшей мере по одному параметру деформации и указанной высоте сечения в лопасти (2), в зависимости от которых выражают абсциссу промежуточной контрольной точки (PCUi) и ординату второй экстремальной точки (PCUK); (b) определение оптимизированных значений параметра или параметров деформации; (с) воспроизведение на интерфейсе (13) указанного устройства (10) определенных таким образом значений. Обеспечивается улучшение аэроакустических характеристик винта. 4 н. и 11 з.п. ф-лы, 7 ил.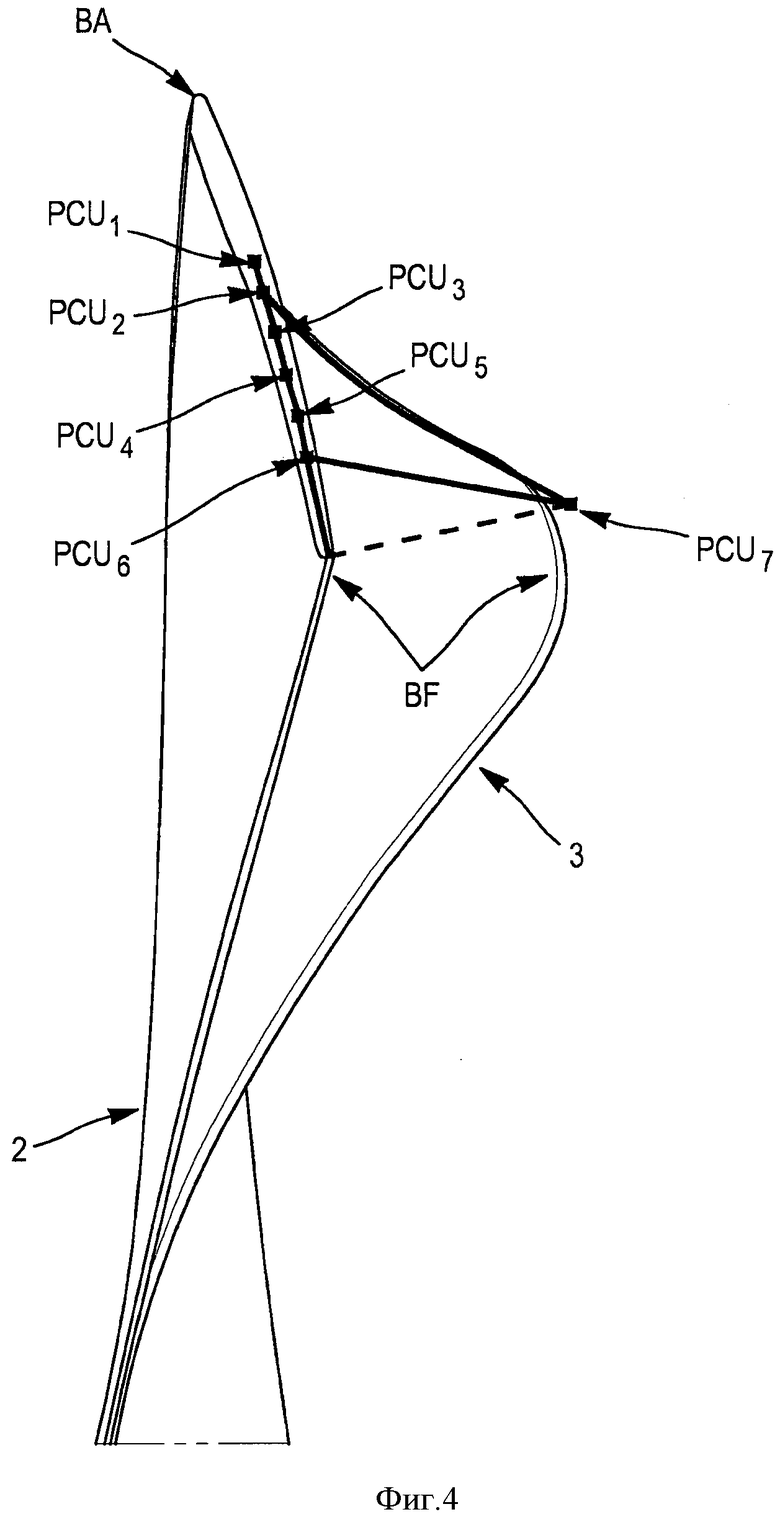
1. Способ моделирования по меньшей мере части лопасти (2) некапотированного винта (1), при этом часть лопасти (2) имеет законцовку (3), включающий выполнение с помощью средств (11) обработки данных устройства (10) этапов, на которых:
(a) параметризируют по меньшей мере одну кривую Безье, отображающую деформацию указанной лопасти (2), характеризующую законцовку (3), в зависимости от положения вдоль сечения на данной высоте в лопасти (2), при этом кривую определяют:
a. первая и вторая экстремальные контрольные точки (PCU1, PCUK), определяющие протяженность указанного сечения лопасти;
b. по меньшей мере одна промежуточная контрольная точка (PCUi,  ), расположенная между экстремальными точками (PCU1, PCUK),
), расположенная между экстремальными точками (PCU1, PCUK),
причем параметризацию выполняют по меньшей мере по одному параметру деформации и указанной высоте сечения в лопасти (2), в зависимости от которых выражают абсциссу промежуточной контрольной точки (PCUi) и ординату второй экстремальной точки (PCUK);
(b) определяют оптимизированные значения параметра или параметров деформации;
(c) воспроизводят на интерфейсе (13) указанного устройства (10) определенные таким образом значения.
2. Способ по п. 1, в котором параметрами деформации являются относительная высота начала деформации (h0) и максимальная законцовка (dmax) на конце лопасти (2), при этом по меньшей мере одну параметризованную кривую Безье связывают с относительной высотой h сечения в лопасти (2), h∈[h0,1].
3. Способ по п. 2, в котором ординату (yK) второй экстремальной контрольной точки (PCUK) получают через выражение  .
.
4. Способ по одному из пп. 2 и 3, в котором абсцисса (xi) указанной по меньшей мере одной промежуточной контрольной точки (PCUi) пропорциональна  .
.
5. Способ по п. 1, в котором К≥4, при этом промежуточная контрольная точка или i-е промежуточные контрольные точки (PCUi), при  , являются подвижными точками, абсцисса которых является функцией высоты указанного сечения в лопасти (2), при этом К-2-я промежуточная контрольная точка (PCUK-1) является неподвижной.
, являются подвижными точками, абсцисса которых является функцией высоты указанного сечения в лопасти (2), при этом К-2-я промежуточная контрольная точка (PCUK-1) является неподвижной.
6. Способ по п. 4, в котором К≥4, при этом промежуточная контрольная точка или i-е промежуточные контрольные точки (PCUi), при  , являются подвижными точками, абсцисса которых является функцией высоты указанного сечения в лопасти (2), при этом К-2-я промежуточная контрольная точка (PCUK-1) является неподвижной, причем абсциссу (xi) К-3 подвижных промежуточных контрольных точек (PCUi) получают при помощи выражения
, являются подвижными точками, абсцисса которых является функцией высоты указанного сечения в лопасти (2), при этом К-2-я промежуточная контрольная точка (PCUK-1) является неподвижной, причем абсциссу (xi) К-3 подвижных промежуточных контрольных точек (PCUi) получают при помощи выражения  , где (xK-1) является абсциссой неподвижной промежуточной контрольной точки (PCUK-1).
, где (xK-1) является абсциссой неподвижной промежуточной контрольной точки (PCUK-1).
7. Способ по п. 6, в котором xK-1=0,75.
8. Способ по п. 5, в котором К=7, чтобы иметь 4 подвижные промежуточные контрольные точки (PCUi).
9. Способ по п. 1, в котором ордината первой экстремальной точки (PCU1) и каждой промежуточной контрольной точки (PCUi) равна нулю.
10. Способ по п. 9, в котором производная кривой Безье на уровне первой экстремальной контрольной точки (PCU1) равна нулю.
11. Способ по п. 1, в котором на этапе (а) выполняют параметризацию множества кривых Безье, соответствующих сечениям на разных высотах в лопасти (2).
12. Способ по п. 1, в котором оптимизированные значения, определенные на этапе (b), являются значениями параметров деформации, при которых интенсивность концевого вихря, создаваемого лопастью (2), является минимальной.
13. Способ изготовления лопасти (2) некапотированного винта (1), при этом лопасть (2) имеет законцовку (3), содержащий этапы, на которых:
выполняют способ по одному из пп. 1-11 для моделирования по меньшей мере части лопасти (2);
изготавливают указанную лопасть (2) в соответствии с моделированием полученной по меньшей мере части лопасти (2).
14. Некапотированный винт (1), содержащий множество лопастей (2), полученных при помощи способа по п. 12.
15. Устройство (10) моделирования по меньшей мере части лопасти (2) некапотированного винта (1), при этом часть лопасти (2) имеет законцовку (3), содержащее средства (11) обработки данных, включающие в себя:
- модуль параметризации по меньшей мере одной кривой Безье, отображающей деформацию указанной лопасти (2), характеризующую законцовку (3), в зависимости от положения вдоль сечения на данной высоте в лопасти (2), при этом кривую определяют:
а. первая и вторая экстремальные контрольные точки (PCU1, PCUK), определяющие протяженность указанного сечения лопасти;
b. по меньшей мере одна промежуточная контрольная точка (PCUi,  ), расположенная между экстремальными точками (PCUi, PCUK),
), расположенная между экстремальными точками (PCUi, PCUK),
причем параметризация выполнена по меньшей мере по одному параметру деформации и указанной высоте сечения в лопасти (2), в зависимости от которых выражается абсцисса промежуточной контрольной точки (PCUi) и ордината второй экстремальной точки (PCUK);
модуль определения оптимизированных значений параметра или параметров деформации;
модуль воспроизведения на интерфейсе (13) указанного устройства (10) определенных таким образом значений.
| B.G.MARINUS et al.: "AERODYNAMIC STUDY OF A `HUMPY` PROPELLER", INTERNATIONAL JOURNAL OF ENGINEERING SYSTEMS MODELLING FND SIMULATION, vol/4, no.1/2, 2012, pages 27-35,XP055116379 | |||
| B.G.MARINUS:"INFLUENCE OF PARAMETERIZATION AND OPTIMIZATION METHOD ON THE OPTIMUM AIRFOIL", 27TH CONGRESS OF THE INTERNATIONAL COUNCIL OF THE AERONAUTICAL SCIENCES - ICAS 2010, 24 september 2010, pages 1-14, XP055117598 | |||
| СПОСОБ ПРОИЗВОДСТВА ТРУБ | 2011 |
|
RU2486021C1 |

