Область техники, к которой относится изобретение
Изобретение относится к области устройств управления для авиационных газотурбинных двигателей, которые могут быть двигателями с простым винтом или со сдвоенными винтами.
Уровень техники
Регулирование работы винта или винтов классически основано на двух видах регулирования.
Прежде всего известно регулирование с постоянной скоростью вращения, при котором шаг винта, то есть угол его установки регулируют при помощи контура обратной связи, позволяющего соблюдать заданное значение скорости вращения, при этом реальную скорость измеряет специальный датчик. Этот вид регулирования применяют на всех режимах полета, в ходе которых скорость движения является достаточно высокой, чтобы обеспечивать стабильную аэродинамическую работу винта.
Известно также регулирование с постоянным шагом, называемое также бета-регулированием. Угол установки зависит от положения рукоятки, задаваемого пилотом, и от скорости вращения винта. Этот вариант используют для всех режимов полета, в которых скорость движения самолета является слишком низкой, чтобы аэродинамическая характеристика винта имела достаточную тяговую реакцию на изменение режима вращения.
Во время перехода от одного варианта регулирования к другому ставят задачу минимизировать изменения тяги, отмечаемые для данного значения мощности, передаваемой валом, так как такие изменения мешают восприятию пилотом нормального поведения силовой установки. При этом стремятся также ограничить изменения режима винта или винтов по причине их влияния на общую динамику двигателя, а также создаваемые вибрации и шум. Кроме того, желательно также сохранять непрерывность всей работы двигателя во всех ситуациях, приводящих к переходу между режимами работы, таких как ускорение, замедление, неожиданные изменения высоты полета самолета или неисправности.
Однако современная архитектура систем регулирования основана только на измерении углов установки и скоростей вращения винта и не позволяет производить никакого упреждающего действия. Соблюдение всех требований непрерывности при управлении двигателем достигается только ценой снижения эффективности, в частности, с выбором угла установки, не соответствующим аэродинамике винта, но в определенной степени обеспечивающим стабильную работу.
Переходы между двумя режимами работы создают, таким образом, трудности с точки зрения регулирования двигателя, и эти трудности, которые уже представляют собой проблему на классических турбовинтовых двигателях, содержащих только один винт, усугубляются на двигателях с двумя винтами, типа не капотированного вентилятора ("open rotor") (и даже, возможно, на двигателях с несколькими винтами), так как в этих двигателях поведение заднего ротора слишком зависит от выходных условий переднего ротора.
Поэтому стремятся улучшить переходы от одного вида регулирования к другому, соблюдая вышеупомянутые требования с точки зрения изменения тяги, режима и непрерывности работы.
Различные исследования, произведенные компанией «General Electric» для NASA ("Extended parametric representation of compressor fans and turbines", 1984), или опубликованные в документе SAE AIR 4065, ставили перед собой цель идентифицировать условия минимальных потерь или простого выражения связи между инвариантами винта. Эти исследования не привели к созданию метода, обеспечивающего улучшение переходов между двумя режимами работы.
Раскрытие изобретения
Для преодоления вышеупомянутых трудностей предложено устройство управления для двигателя, содержащее средства вычисления заданного значения угла установки по меньшей мере одного винта двигателя, при этом средства вычисления учитывают по меньшей мере одну скорость полета.
Благодаря такому устройству можно применять предсказательное действие и улучшить функцию автоматического регулирования заданного значения установки, чтобы оно соответствовало определенным для него техническим требованиям во время переходов от одного вида регулирования к другому и одновременно соблюдало вышеупомянутые требования. При этом получают упреждающее регулирование необходимых углов установки и ограничивают вышеупомянутые недостатки, в частности отклонения за пределы диапазонов тяги, режима и нарушения непрерывности работы. Повышают также точность, улучшают время реакции и стабильность локального контура управления шагом винта или винтов. Сокращается также время схождения автоматического регулирования угла установки.
Кроме того, для аппаратов, летающих на более высоких скоростях (например, с числом Маха более 0,5), изобретение позволяет улучшить регулирование угла установки с учетом сжимаемости воздуха при контакте с лопастями.
Согласно предпочтительному отличительному признаку величину, характеризующую поведение винта или винтов, определяют при помощи по меньшей мере одного многочлена, например, второго порядка. Это позволяет применять метод в вычислительном устройстве небольшой мощности. Использование многочлена является простой математической операцией, легко интегрируемой в вычислительное устройство ограниченной мощности.
Согласно другому отличительному признаку, величину, характеризующую поведение винта или винтов, определяют в зависимости от относительного числа Маха для лопасти винта и от предполагаемого угла установки винта.
Таким образом, учитывают влияние сжатия, связанное со скоростями в околозвуковой области, для быстрых винтов, таких как винты некапотированного вентилятора или advanced turboprop.
В некоторых вариантах осуществления определяют цифровые значения потерь, вычисляемые на основе моделей ожидаемых потерь, связанных с работой винта или винтов. Эта характеристика позволяет распространить предсказание поведения винта или винтов на всю область полета, включая особые условия.
В некоторых вариантах осуществления определяют коэффициент поглощаемой мощности. Кроме того, в некоторых вариантах осуществления средства вычисления используют режим вращения винта или винтов. Предусмотрено также, что средства вычисления используют предполагаемый угол установки и что они используют итерационный цикл, критерием выключения которого является совпадение вычисленного значения мощности на валу.
Устройство управления может представлять собой модуль для полностью автономной электронно-цифровой системы регулирования или встроенный в эту систему.
Объектом изобретения является также полностью автономная электронно-цифровая автоматическая система регулирования, содержащая описанное выше устройство, и, кроме того, турбовинтовой двигатель, содержащий вышеупомянутое устройство управления, или двигатель с некапотированным вентилятором, содержащий вышеупомянутое устройство управления.
Краткое описание чертежей
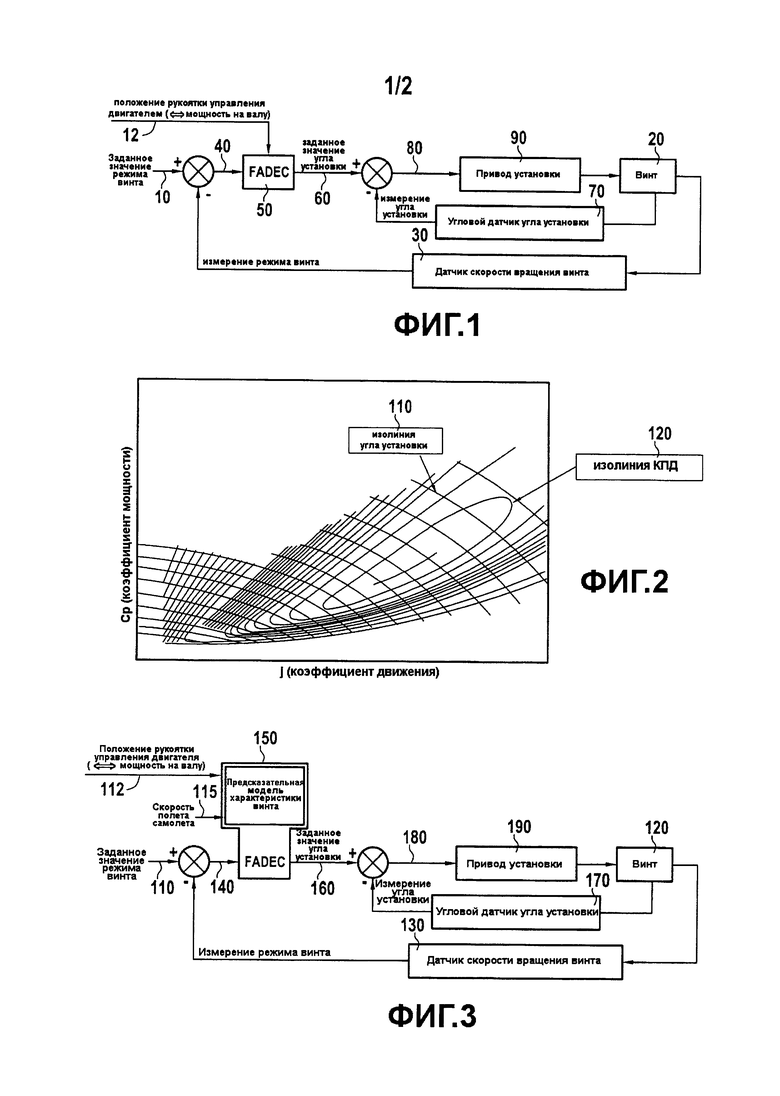
На фиг. 1 показан контур автоматического регулирования угла установки винта газотурбинного двигателя с применением изобретения;
на фиг. 2 представлена диаграмма для вычисления коэффициентов полезного действия винта;
на фиг. 3 показан вариант осуществления изобретения;
на фиг. 4 показан протокол, применяемый в варианте осуществления изобретения;
на фиг. 5 и 6 представлены частные аспекты протокола, представленного на фиг. 4.
Осуществление изобретения
На фиг. 1 представлен контур управления углом установки винта или винтов для регулирования на постоянной скорости вращения.
Заданное значение 10 для режима винта 20 задает пилот или автоматическая система управления или регулирования. Датчик 30 скорости вращения винта позволяет вычислять разность 40 между заданным значением и моментальным значением.
Эта разность 40 поступает в FADEC 50 (полностью автономный электронно-цифровой контроллер), который на основании заданного значения положения рукоятки газогенератора 12, характеризующего мощность на валу, определяет заданное значение угла установки 60. Это определение происходит в ходе итерационного процесса на основании списка значений угла установки, заранее определенного в зависимости от положения рукоятки управления двигателем без учета скорости полета. Итерационный процесс использует модель, которая на основании угла установки дает получаемую мощность на валу. Итерации останавливаются, когда вычисленная мощность соответствует требуемой мощности.
Угловой датчик 70 угла установки позволяет вычислять разность между моментальным значением угла установки и заданным значением, которое передают на привод 90, выполненный в виде силового цилиндра и действующий на угол установки винта 20.
Работу винта или винтов характеризуют при помощи представленных ниже классических безразмерных инвариантов.
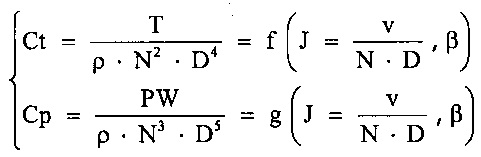
Ct = коэффициент тяги,
Ср = коэффициент поглощаемой мощности,
J = коэффициент движения,
Т = тяга, создаваемая винтом,
PW = мощность на валу винта,
N = режим вращения винта,
D = диаметр винта,
v =скорость движения (или полета) самолета,
β = угол установки винта.
Для быстрых винтов, таких как винты некапотированного вентилятора или advanced turboprop, добавляют поправку, зависящую от числа Маха полета, чтобы лучше характеризовать поведение винта во всей области полета.
Комбинация инвариантов Ct, Ср и J позволяет также определить понятие КПД винта 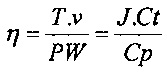 .
.
Эти коэффициенты используют в виде «поля винта», характеризующего изменение КПД в зависимости от коэффициентов движения J, от поглощаемой мощности Ср, как показано на фиг. 2. На фиг. 2 на оси абсцисс показан коэффициент движения J, а на оси ординат - коэффициент поглощаемой мощности Ср. Их определяют, зная КПД η, для которого построены кривые изолинии КПД 100, и угол установки, для которого также строят кривые изолинии установки 110. Эти графики имеют недостатки.
Прежде всего следует подготовить несколько графиков этого типа для разных чисел Маха, связанных с лопастями винта, и осуществить интерполяцию полученных значений J и Ср между этими графиками. При этом, учитывая сужение кривых в нижней части слева графика, в этой зоне точность является невысокой. Кроме того, эти графики трудно построить для экстремальных условий, таких как близость к срыву в штопор самолета или резко отрицательный угол атаки. Наконец, при нулевой скорости КПД не определяется.
На фиг. 3 представлены общие принципы варианта осуществления изобретения. Элементы имеют те же цифровые обозначения, что и на фиг. 1, но с добавлением 100. Так, контроллер FADEC 150 (или его подсистема, отвечающая за регулирование шага винта или винтов) вычисляет заданное значение 160 угла установки на основании разности 140 между заданным значением скорости и моментальной скоростью вращения винта или винтов. Для вычисления FADEC 150 учитывает также заданное значение положения рукоятки газогенератора 112, характеризующее мощность на валу, как на фиг. 1. Вместе с тем он учитывает также скорость полета самолета 115.
В контроллере FADEC 150 для вышеупомянутого вычисления используют модель характеристики винта или винтов, основанную на предсказании потерь, связанных с работой винта или винтов (обозначаемых в дальнейшем Loss), и коэффициента поглощаемой мощности Ср, причем оба этих параметра оценивают в зависимости от рабочих условий, то есть в зависимости от скорости v 115 полета самолета, от режима или режимов вращения N винта или винтов, измеряемых датчиком 130, и в зависимости от предполагаемого угла установки β. Эту модель характеристики, как и на фиг. 1, применяют итерационно внутри FADEC 150 посредством последовательных уточнений гипотезы угла установки вплоть до схождения с заданным значением мощности на валу.
Потери (loss) определяют как разность между работой, производимой тяговым усилием, и механической мощностью, получаемой на валу, в соответствии с выражением  .
.
Их преимуществом перед КПД является то, что они всегда являются определенными и положительными независимо от режима работы винта или винтов.
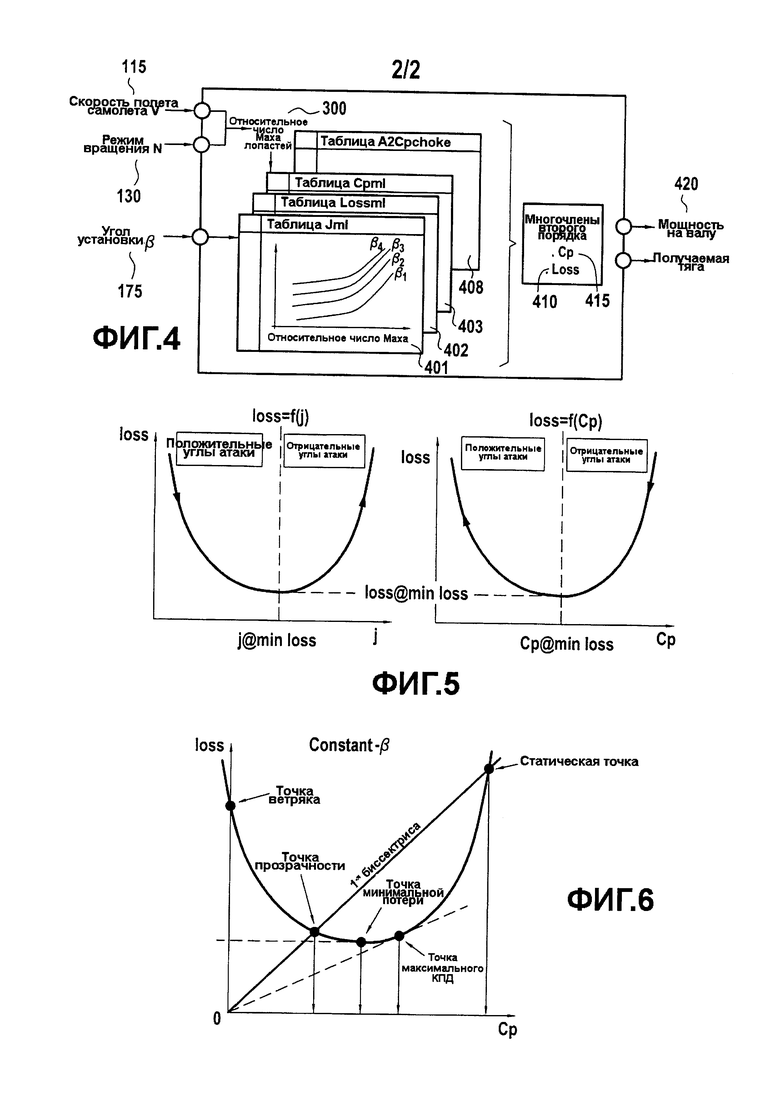
На фиг. 4 показана общая архитектура модели. Предсказание этих двух величин (loss и Ср) осуществляют посредством простого вычисления многочленов, в котором коэффициенты вычисляют в зависимости от угла установки β и от относительного числа Маха лопастей 300, которое, в свою очередь, зависит от скорости полета самолета v 115 и от режима или режимов вращения N винта или винтов.
Входные значения v (обозначение 115, измерение), N (обозначение 130, измерение) и β (обозначение 175, гипотеза, уточняемая путем итерации) используют в описанном примере осуществления для определения восьми цифровых значений, каждое из которых считывают в заранее определенной соответствующей таблице. В рамках изобретения можно предусмотреть другие варианты с другим числом таблиц. На фиг. 4 восемь таблиц показаны под обозначениями 401-408. На каждой из этих таблиц ось абсцисс отображает относительно числа Маха лопастей, а ось ординат показывает считываемое цифровое значение. На каждой таблице показаны несколько кривых, соответствующих разным значениям угла установки β, и выбор на каждой таблице кривой и значения абсциссы дает единственное считываемое цифровое значение. Естественно, можно считанные значения интерполировать на двух кривых, соответствующих двум значениям β.
Восемь цифровых значений, считанных на таблицах, позволяют определить цифровые значения двух искомых величин, то есть потери (loss) 410 и коэффициент поглощаемой мощности (Ср) 415, при помощи многочленов второго порядка. Определение этих значений позволяет вывести мощность на валу 420 и создаваемую тягу в рамках предсказательной модели аэродинамического поведения винта. Итерационный процесс продолжается с значением угла установки 175, уточняемым пока вычисленная мощность на валу 420 не будет соответствовать заданному значению 112.
Таким образом, метод основан на идентификации рабочей точки с минимальными потерями и корреляций, позволяющих определить отклонение по отношению к этой оптимальной рабочей точке.
Корреляции потерь можно моделировать в виде двух элементов параболы, как показано на фиг. 5, один из которых соответствует положительным углам атаки ("stall side"), а другой - отрицательным углам атаки ("choke side"). Предпочтительно эти потери отображают в плоскости коэффициента движения J (слева на фиг. 5).
Вводят параметр положения GH следующим образом: GH = Jml - J, где Jml характеризует коэффициент движения с минимальными потерями ("J minimum loss"). Таким образом, GH характеризует отклонение коэффициента движения по отношению к работе с минимальными потерями.
Моделирование потерь осуществляют с применением следующего уравнения:
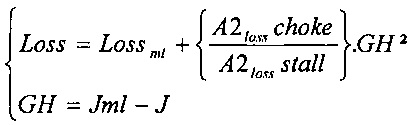
Это моделирование использует только четыре коэффициента для данных угла установки лопасти β и относительного числа Маха работы. Этими коэффициентами являются:
- Lossml: минимальные потери,
- Jml: коэффициент движения, соответствующий минимальным потерям,
- A2losschoke: параболическая кривая потерь при отрицательных углах атаки,
- A2lossstall: параболическая кривая потерь при положительных углах атаки.
Коэффициент поглощаемой мощности выражает аэродинамическую характеристику лопастей, напрямую связанную с их локальным углом атаки.
Изменение коэффициента мощности можно моделировать просто, в данном случае в виде комбинации линейной тенденции и двух элементов параболы, один из которых соответствует положительным углам атаки ("stall side"), а другой - отрицательным углам атаки ("choke side").
Моделирование коэффициента поглощаемой мощности Ср принимает следующий вид:

В этом моделировании опять участвуют только четыре коэффициента для данных угла установки лопасти β и относительного числа Маха работы. Этими коэффициентами являются:
- Cpml: коэффициент поглощаемой мощности на линии минимальных потерь,
- А1: коэффициент первого порядка модели коэффициента поглощаемой мощности,
- A2Cpchoke: параболическая кривая коэффициента поглощаемой мощности при отрицательных углах атаки,
- A2Cpstall: параболическая кривая коэффициента поглощаемой мощности при положительных углах атаки.
Этот аналитический подход к потерям и к коэффициенту поглощаемой мощности обеспечивает не только идентификацию характеристик винтов, которые можно вычислить при помощи предсказательных средств (коды aero 2D несущей линии, 3D Navier-Stokes) или обычных экспериментальных средств, но также распространение предсказания за пределы этой области.
Действительно работа винта или винтов имеет по меньшей мере пять характеристических точек, показанных на фиг. 6. Этими точками являются:
- Статическая точка, характеризующаяся нулевой скоростью движения (J=0),
- Точка максимального КПД,
- Точка минимальной потери,
- Точка прозрачности: начало работы в режиме реверса (смена знака коэффициента тяги),
- Точка ветряка: начало работы в режиме ветряной мельницы (создание лобового сопротивления без поглощения мощности - Ср=0).
Описанное выше многочленное моделирование обеспечивает аналитическое вычисление координат (с точки зрения потерь и коэффициента мощности) каждой из этих пяти характеристических точек. В частности, возможность предсказания поведения винта или винтов на отдельных точках - статической, прозрачности и ветряка - представляет собой прогресс в способности отображения поведения винта или винтов во всей их рабочей области как в режиме полного газа, так и малого газа, при любых внешних условиях полета.
Таким образом, преимуществами предложенного технического решения являются простота цифрового применения, позволяющая интегрировать его в вычислительное устройство малой мощности (всего несколько интерполяций, осуществляемых в цифровых сетях малого объема, и несколько аналитических многочленных вычислений), надежность предсказания за счет единичности получаемых решений, идентичная математическая точность независимо от рассматриваемой рабочей зоны (включая низ слева диаграммы [J,Cp]), упрощение и повышение надежности учета влияния сжимаемости посредством выражения фундаментальных коэффициентов метода в зависимости от относительного числа Маха лопастей и распространение возможности предсказания поведения винта или винтов на всю область полета, включая особые условия (статическое условие, точка прозрачности, флюгирование…), при этом понятие потерь (loss), на котором основано решение, всегда является определенным и положительным.
Изобретение не ограничивается раскрытыми вариантами осуществления и охватывает все версии в рамках объема формулы изобретения.
Группа изобретений относится к устройству управления двигателем, автономной электронно-цифровой автоматической системе регулирования, турбовинтовому двигателю и двигателю с некапотированным вентилятором. Устройство управления двигателем содержит средства вычисления заданного значения угла установки винта двигателя определенным образом. Автономная электронно-цифровая автоматическая система регулирования, турбовинтовой двигатель и двигатель с не капотированным вентилятором содержат устройство управления двигателем. Обеспечивается улучшение регулирование винта для соответствия заданному значению мощности на валу. 4 н. и 6 з.п. ф-лы, 6 ил.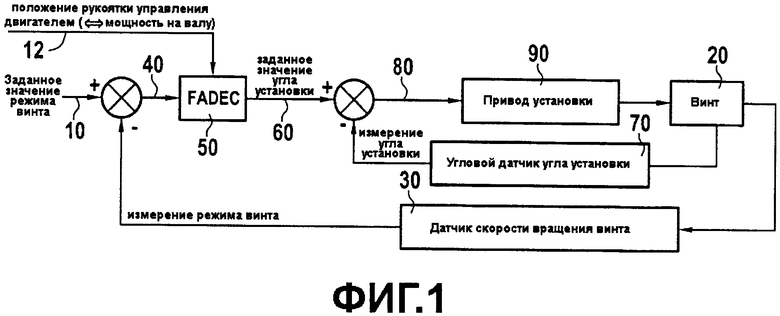
1. Устройство управления двигателем, содержащее средства вычисления заданного значения угла установки по меньшей мере одного винта двигателя, при этом средства вычисления используют модель характеристики винта, учитывающую по меньшей мере одну скорость полета для адаптации заданного значения угла установки с учетом заданного значения мощности на валу, при этом указанная модель характеристики основана на предсказании потерь, связанных с работой винта и с коэффициентом поглощаемой мощности.
2. Устройство управления по п. 1, в котором величина, характеризующая поведение винта, определяется при помощи по меньшей мере одного многочлена как минимум второго порядка.
3. Устройство управления по п. 1, в котором величина, характеризующая поведение винта, определяется в зависимости от относительного числа Маха для лопасти винта и от предполагаемого угла установки винта.
4. Устройство управления по п. 1, в котором средства вычисления используют режим вращения винта.
5. Устройство управления по п. 1, в котором средства вычисления используют предполагаемый угол установки.
6. Устройство управления по п. 1, в котором средства вычисления используют итерационный цикл, критерием выключения которого является совпадение вычисленного значения мощности на валу с заданным значением мощности на валу.
7. Устройство управления по п. 1, которое представляет собой модуль для полностью автономной электронно-цифровой системы регулирования.
8. Полностью автономная электронно-цифровая автоматическая система регулирования, содержащая устройство управления по п. 1.
9. Турбовинтовой двигатель, содержащий устройство управления по п. 1.
10. Двигатель с некапотированным вентилятором, содержащий устройство управления по п. 1.
| СИСТЕМА УПРАВЛЕНИЯ ВОЗДУШНЫМИ ВИНТАМИ ТУРБОВИНТОВЕНТИЛЯТОРНОГО ДВИГАТЕЛЯ | 1990 |
|
RU2014245C1 |
| RU 94040349 A1, 20.09.1996 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2425238C2 |
| ШИХТА ДЛЯ ПОЛУЧЕНИЯ ДЕКОРАТИВНО-ОБЛИЦОВОЧНОГО МАТЕРИАЛА | 2012 |
|
RU2505494C1 |
| US 5209640 A1, 11.05.1993. | |||

