Предлагаемое изобретение относится к средствам космической технологии, конкретнее - к технике объемной 3D печати по принципу послойного наращивания твердой геометрической фигуры.
В материалах официального сайта ФГУП "Государственный космический научно производственный центр имени М.В. Хруничева" имеются предложения по использованию космических ракет, содержащих коммерческий посадочный модуль, для доставки коммерческих грузов больших объемов и масс в космическое пространство, в том числе на Луну.
В открытых источниках "Лунной советской программы" - официальный сайт НПО им. С.А. Лавочкина "К 35-летию посадки на Луну первого самоходного аппарата Луноход 1", приведено обоснование по применению колесного шасси в условиях лунной поверхности, размещение электронной аппаратуры в герметичном контейнере с подогревом на время лунной ночи, использование солнечной батареи и резервного аккумуляторного источника. Изложена целесообразность применения датчика лунной вертикали при выполнении исследовательской задачи, связанной с перемещением объекта по грунту, и наличие возможности командного управления с Земли.
Недостатком самоходного аппарата является ограниченность его действий обусловленная исследовательской задачей и наличие командного управления с Земли.
Известен способ и устройство для управления объектами с помощью гибкой связи RU 2017659 от 28.06.1991 г. Способ включает соединение объектов рабочим участком гибкой связи из материала в твердофазном состоянии, образование запаса гибкой связи из материала в вязко-текучем состоянии и придание рабочему участку гибкой связи движения относительно объектов с одновременным формированием рабочего участка гибкой связи из ее запаса в зависимости от заданных и текущих параметров с возможностью изменения физико-механической характеристики этого участка: профиля поперечного сечения, поверхностных характеристик и материала, при этом образуя запас путем перевода материала гибкой связи из твердофазного в вязко-текучее состояние.
В устройстве, реализующем метод экструзии - преобразование физико-механических характеристик материала из твердофазного в вязкотекущее состояние, приведены описание автоматики управления экструзивным процессом и фигуры возможного технического решения.
Недостаток устройства связан с функциональной ограниченностью, обусловленной акцентом на поддержании задач, обеспечения гибкой связи и потребность индикации параметров относительного движения объектов.
Известен «Комплекс средств разработки для получения Не3 из лунного грунта» по патенту RU 2328599 (12.12.2006). Комплекс включает тяговое, грунтозаборное, транспортирующие и приемно-перерабатывающие средства. Тяговое средство выполнено в виде двух однотипных механизмов, снабженных съемными усилителями сцепления с грунтом. Съемные усилители расположены симметрично по обе стороны тягового средства. Приемно-перерабатывающее средство расположено вне зоны разработки грунта. Приемное средство представляет собой ряд естественных отвалов лунного грунта, образованных путем метания грунта из зоны разработки к перерабатывающему средству. Комплекс снабжен приемно-излучающим устройством, установленным на тяговом средстве, для предварительного нагрева грунта.
Недостатками устройства являются: громоздкость устройств помещенных в космические условия Луны и сложность алгоритма реализации технологии взрывоопасного процесса, требующего незамедлительного вмешательства специалиста.
Известно «Устройство для изготовления объемных деталей и конструкций в космическом пространстве» по патенту RU 2438939 (26.08.2010 г.). Оно содержит формирователь электронного луча, микроэлектродвигатели, взаимосвязанные с подвижной платформой. На поверхности платформы размещены изготавливаемый трехмерный объект, система подачи проволоки, компьютерная система и контейнер. Формирователь электронного луча и система подачи проволоки размещены на обратной стороне верхней крышки контейнера. Дополнительно введены первая площадка, закрепленная на внешней поверхности космической станции, вторая площадка и фермы, соединяющие первую площадку со второй площадкой. На обратной стороне верхней крышки контейнера размещено видеоконтрольное устройство. Крышка контейнера размещена между первой площадкой и второй площадкой на расстоянии, позволяющем обеспечить оптимальную работу устройства для подачи проволоки, устройства видеоконтроля и безопасную работу формирователя электронного луча. Нижнее основание микроэлектродвигателей соединено с поверхностью второй площадки, направленной в сторону космической станции. Верхний микроэлектродвигатель соединен с подвижной платформой. Формирователь электронного луча, система подачи проволоки, устройство видеоконтроля и микродвигатели соединены с компьютером.
Недостатками устройства являются: использование технологии изготовления 3D объектов в ограниченном по размерам приспособлении - контейнере или на поверхности космической станции и присутствие активного наблюдателя.
Прототипом предлагаемого изобретения является «Роботизированная система, включающая средства доставки роботов-грунтокопателей в два этапа и дополнительно людей для управления роботами [Press Release (24.09.2015) Официального сайта Лондонской архитектурной фирмы Foster + Partners: проект строительства лунной базы]. Роботизированная система реализует программу 3D-печати в строительстве помещений из материала космического грунта - реголита.
Недостатком предложенной концепции строительства лунной базы является ее ограниченность обусловленная определенностью решаемой задачи и потребность вмешательства оператора в выполняемый процесс.
Технический результат предлагаемого изобретения заключается в расширении интеллектуальных возможностей устройства, исключающих присутствие человека на космическом объекте при создании строительных элементов, являющихся готовой продукцией.
Сущность роботизированного комплекса, содержащего исполнительное оборудование, объединенное каркасом, колесную транспортную платформу с роботами, источники энергии комплекса. Источники энергии, включающие аккумуляторные батареи, элементы солнечной батареи и элементы температурной стабилизации размещены в контейнере с крышкой. Исполнительное оборудование включает сенсор касания поверхности космического объекта, микропроцессорный оптимизатор ситуаций, электронный сенсор вертикали, а также систему стереоскопического отображения места нахождения комплекса и станцию местной радиосвязи, размещенные в контейнере с крышкой. Узел объективов, связанный с системой стереоскопического отображения, размещен на каркасе средств доставки. На колесной транспортной платформе установлен бункер автономных роботов-функторов, снабженных двунаправленной адресной командной связью и персональными позывными, а также микроконтроллерами и автономными источниками питания, бункер размещен между контейнером и колесной транспортной платформой.
В основании бункера автономных роботов-функторов установлен шарнирно закрепленный трап для их перехода из бункера на поверхность грунта. При этом робот функтор-грунтокопатель, размещенный в бункере, связан с источниками энергии комплекса, снабжен приемопередатчиком для обмена адресно-командной информацией со станцией местной радиосвязи и микроконтроллером. Микроконтроллер обеспечивает управление автономными источниками электропитания, механизмами перемещения функторов-грунтокопателей и функциональными действиями их рабочих инструментов. Робот функтор-грунтокопатель имеет также комплект рабочего инструмента, который закреплен на бункере-накопителе. Рабочий инструмент соответствует функциональному назначению робота. Робот функтор 3D-печати имеет также бункер-накопитель, снабженный пакетом экструдинг-прессов с нагревателями. На каркасе установлены средства укладки строительных элементов (готовой продукции).
Перечень фигур
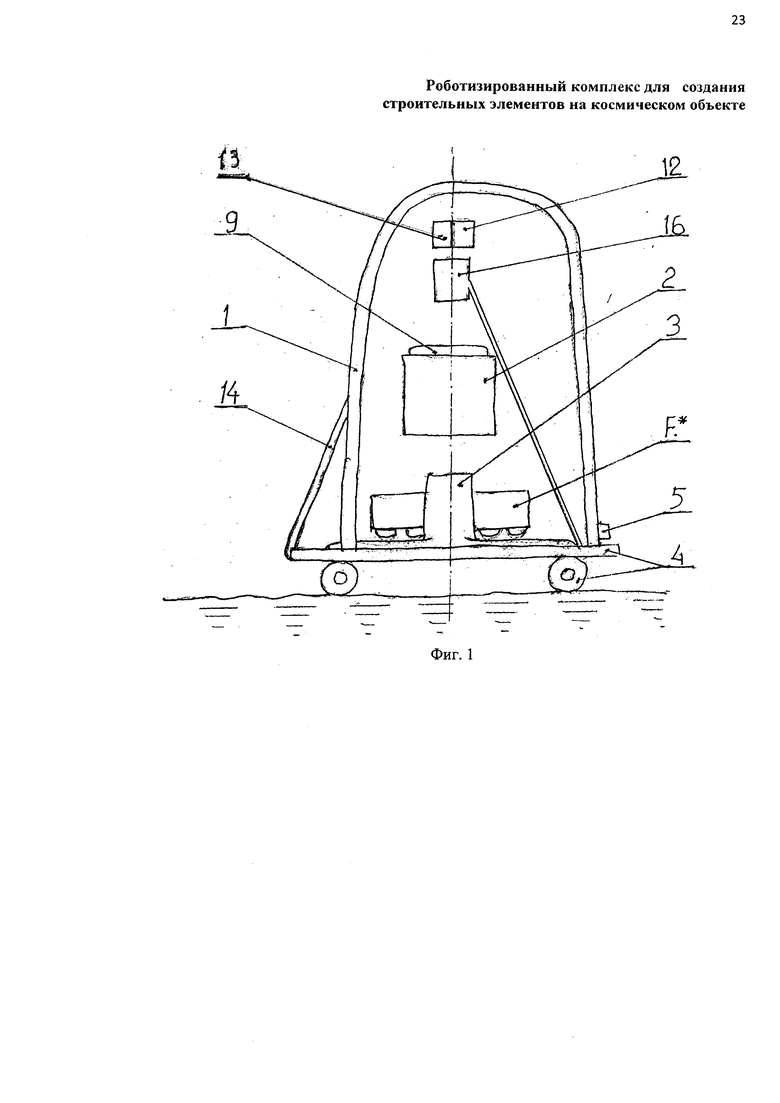
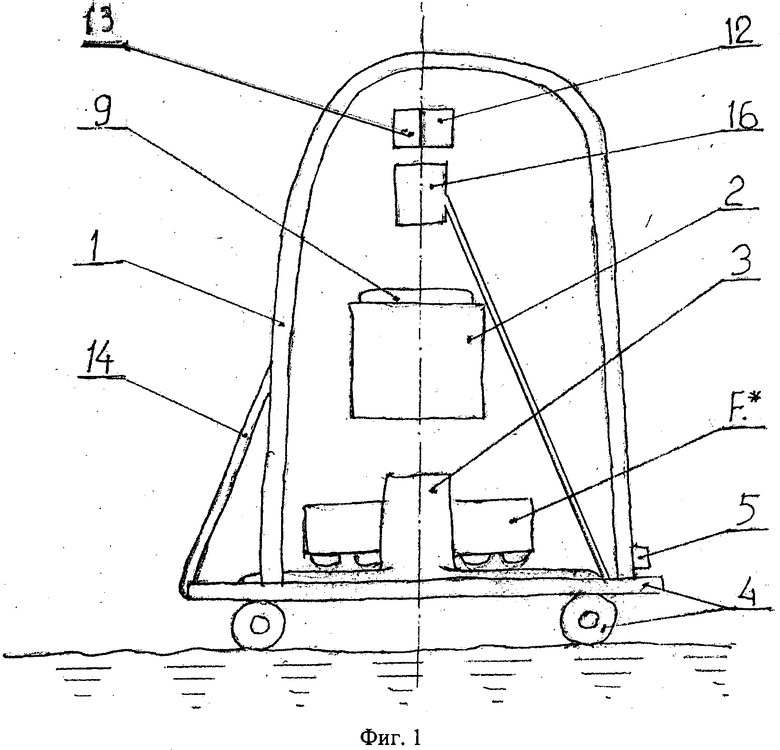
Фиг. 1. Расположение оборудования роботизированного комплекса в посадочном модуле: 1 - каркас, 2 - контейнер, 3 - бункер, 4 - колесная транспортная платформа, 5 - сенсор касания поверхности космического объекта, 9 - крышка контейнера, 12 - узел объективов, 14 - трап, 16 - средства укладки готовой продукции, 01 - функтор-грунтокопатель, 02- функтор 3D-печати (F*);
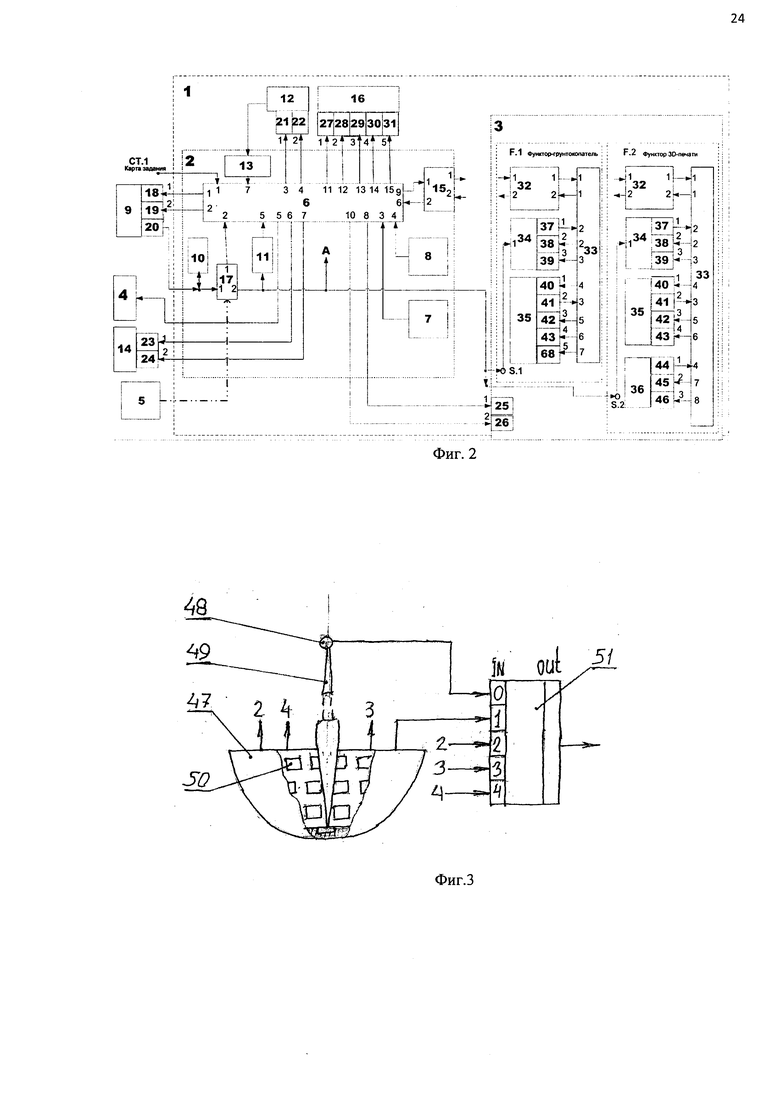
Фиг. 2. Блок-схема функциональных связей роботизированного комплекса: 1 - каркас, 2 - контейнер, 3 - бункер для функторов, 4 - колесная транспортная платформа, 5 - сенсор касания поверхности, 6 - микропроцессорный оптимизатор ситуаций, 7 - элементы температурной стабилизации, 8 - электронный сенсор вертикали, 9 - крышка контейнера, 10 - аккумуляторная батарея, 11 - электронный сенсор заряда, 12 - узел объективов, 13 - система стереоскопического отображения, 14 - трап, 15 - станция местной радиосвязи, 16 - средства укладки, 17 - механический включатель электропитания комплекса сенсора касания поверхности 5 (сеть электропитания комплекса двухполярная (не заземленная) на фиг. 2 обозначена как точка 03 ="А"), 18 - шаговый двигатель открытия, 19 - шаговый двигатель поворота, 20 - элементы солнечной батареи, 21 - шаговый двигатель кругового обзора, 22 - шаговый двигатель секторного обзора, 23 - электромеханическая защелка, 24 - шаговый двигатель спуска/подъема трапа, 25 - шаговый двигатель поворота бункера, 26 - электромеханический фиксатор функторов совмещенный с разъемным подключением 04- и 05 =S* к источникам энергии комплекса - точка 03 ="А"), 27 - шаговый двигатель спуска/подъема троса с клещевым захватом, 28 - шаговый двигатель продольного перемещения тележки по стреле, 29 - шаговый двигатель поворота стрелы, 30 - шаговый двигатель подъема стрелы, 31 - электромеханический фиксатор стрелы средства укладки, 32 - ответчик местной радиосвязи, 33 - микроконтроллер, 34 - узел электропитания с панелью солнечных элементов и аккумуляторной батареей, 35 - бункер-накопитель, 36 - пакет экструдинг-прессов с нагревателями, 37 - электронный сенсор зарядки аккумуляторной батареи, 38 - шаговый двигатель открытия крышки бункера-накопителя, 39 - шаговый двигатель поворота крышки, 40 - мотор-колеса функтора, 41 - механический сенсор уровня грунта, 42 - мотор винтового конвейера, 43 - шаговый двигатель вертикального перемещения мотора с винтовым конвейером, 44 - электронный сенсор температуры экструдера, 45 - шаговый двигатель перемещения пластины с воронками, 46 - шаговый двигатель продольного перемещения мотора с винтовым конвейером, 68 - шаговый двигатель узла поворота 67 (см. фиг. 8);
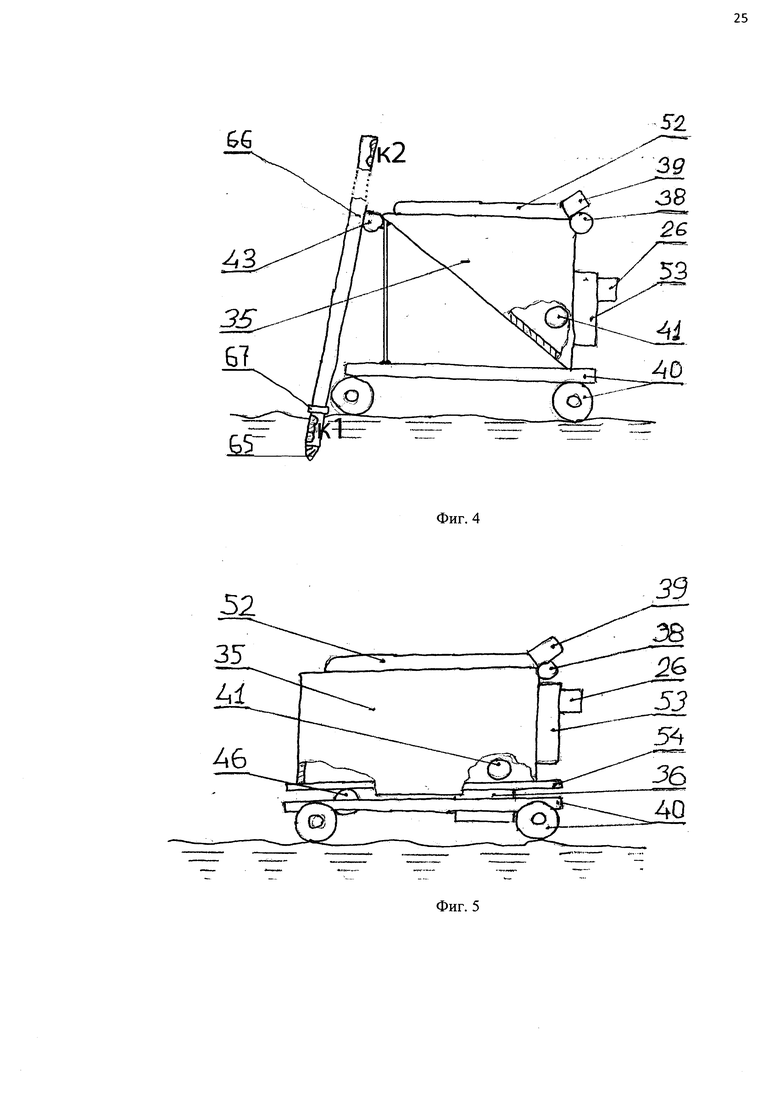
Фиг. 3. Электронный сенсор вертикали: 47 - чаша, 48 - шарнир, 49 - маятник, 50 - контактные площадки, 51 - микроконтроллер;
Фиг. 4. Функтор-грунтокопатель 01 (F1): 26 - электромеханический фиксатор функтора в бункере 3 совмещенный с разъемным подключением 04 (S*) к источникам энергии комплекса - точка 03 ("А"), 53 - футляр с размещенными в нем: 32 - ответчик местной радиосвязи, 33 - микроконтроллер, 34 - узел электропитания с панелью солнечных элементов, аккумуляторной батареей и 37 - электронным сенсором зарядки аккумуляторной батареи, 35 - бункер-накопитель, 52 - крышка функтора-грунтокопателя с размещенными на внутренней стороне панелями солнечных элементов узла электропитания 34, 38 - шаговый двигатель открытия крышки, 39 - шаговый двигатель поворота крышки, 40 - мотор-колеса функтора, 41 - механический сенсор уровня грунта в бункере-накопителе, 66 - винтовой конвейер с 42 - электродвигателем с 65 - конусной фрезой и 67 - узлом поворота с 68 - шаговым двигателем узла поворота (см. фиг. 2, фиг. 8), 43 - шаговый двигатель вертикального перемещения винтового конвейера 66;
Фиг. 5. Функтор 3D-печати 02 (F2): 26 - электромеханический фиксатор функтора в бункере 3 совмещенный с разъемным подключением 05 (S*) к источникам энергии комплекса - точка 03 ("А"), 53 - футляр с размещенными в нем: 32 - ответчик местной радиосвязи, 33 - микроконтроллер, 34 - узел электропитания с панелью солнечных элементов с аккумуляторной батареей и 37 - электронным сенсором зарядки аккумуляторной батареи, 35 - бункер-накопитель, 36 - пакет экструдинг-прессов с нагревателями, 37 - электронный сенсор зарядки аккумуляторной батареи, 38 - шаговый двигатель открытия крышки, 39 - шаговый двигатель поворота крышки, 40 - мотор-колеса функтора, 41 - механический сенсор уровня грунта в бункере-накопителе, 52 - крышка функтора 3D-печати с размещенными на внутренней стороне панелями солнечных элементов узла электропитания 34, 54 - днище бункера-накопителя функтора 3D-печати, 46 - шаговый двигатель продольного перемещения днища бункера-накопителя функтора 3D-печати;
Фиг. 6. Структура экструдер-пресса с раздельным шнеком и с нагревателем - 36 (см. фиг. 2 и фиг. 5), 42 - электродвигатель шнека экструдер-пресса, 43 - шаговый двигатель управления экструдером, 44 - электронный сенсор температуры, 55 - шнек, 56 - гильза, 57 - отверстие для воронки, 58 - эластичное соединение, 59 - экструдер, 60 - нагреватель, 61 - головка экструдера
Фиг. 7. Компоновка экструдинг-прессов с нагревателями 36 функтора 3D-печати F2: 35 - бункер-накопитель, 40 - мотор-колеса функтора, 41 - механический сенсор уровня грунта в бункере-накопителе, 45 - шаговый двигатель перемещения пластины с воронками, 54 - днище бункера-накопителя функтора, 55 - шнек, 56 - гильза, 57 - отверстие для воронки, 62 - пластина с воронками.
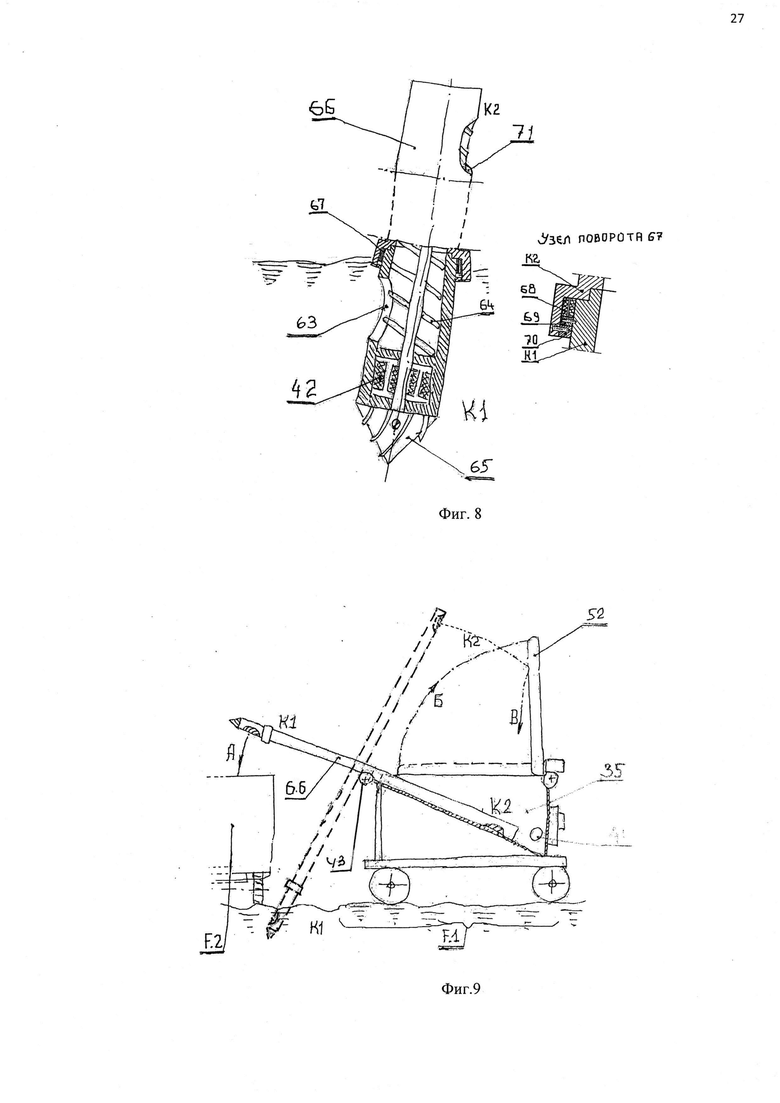
Фиг. 8. Функциональный инструмент функтора F1: 42 - электродвигатель винтового конвейера, 63 - окно конвейера (конец К1), 64 - шнек винтового конвейера, 65 - коническая фреза, 66 - винтовой конвейер, 67 - узел поворота, 68 - шаговый двигатель, 69 - и 70 - запорные кольца, 71 - окно конвейера (конец К2).
Фиг. 9. Схема режимов "сбор" и "выгруз". F1 - функтор-грунтокопатель, F2 - функтор 3D-печати, 43 - шаговый двигатель вертикального перемещения функционального инструмента функтора F1(см. фиг. 4), 52 - крышка функтора-грунтокопателя, 66 - винтовой конвейер в положении режима "выгруз", К1 - рабочий конец винтового конвейера 66 с конусной фрезой и узлом поворота (см. фиг. 4, фиг. 8), К2 - противоположный конец винтового конвейера 66, пунктирное изображение винтового конвейера соответствует режиму "сбор", А - движение реголита в режиме "выгруз", Б - траектория открытия крышки 52 в режиме "сбор", В - направление перемещения реголита в режиме "сбор".
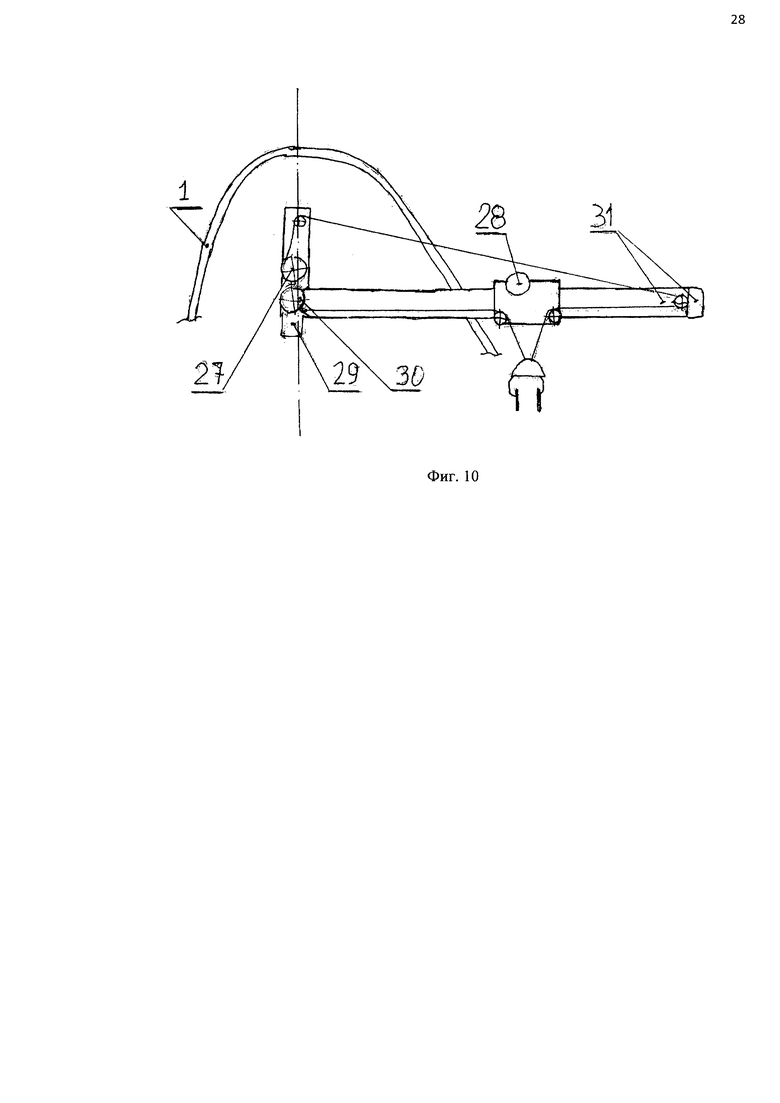
Фиг. 10. Средства укладки 16 строительных элементов (см. фиг. 1). 31 - стрела с электромеханическим фиксатором, 27 - шаговый двигатель спуска/подъема троса с клещевым захватом, 28 - шаговый двигатель продольного перемещения тележки по стреле, 29 - шаговый двигатель поворота стрелы, 30 - шаговый двигатель подъема стрелы.
Структура связей роботизированного комплекса.
Общий состав оборудования роботизированного комплекса, размещенного в спускаемом модуле ракетоносителя, представлен на фиг. 1. Оборудование в модуле объединено каркасом 1. Он обеспечивает фиксированное размещение контейнера 2, бункера 3, колесной транспортной платформы со всеми ведущими колесами (мотор-колесами) 4, сенсора касания поверхности 5, узла объективов 12, трапа 14, обеспечивающего переход функторов на грунт для выполнения своих функций, средства укладки строительных элементов 16. В бункере 3 размещены функтор-грунтокопатель F1 и функтор 3D-печати F2. Каркас 1 имеет три точки опоры. Две из них размещены на одном конце колесной транспортной платформы 4. Между ними расположен трап 14. Третья опора размещена на противоположной стороне платформы 4 по средней лини между первой парой колес, образуя с первыми опорами углы достаточные для работы средств укладки 16.
На фиг. 2 представлена общая схема функциональных связей роботизированного комплекса. На схеме показаны связи между блоками и входящими в них исполнительными элементами комплекса.
Каркас 1 обеспечивает механические связи между исполнительными элементами комплекса во время их доставки на космический объект и функционирование элементов во время выполнения соответствующих работ. Блоками комплекса являются: контейнер 2, бункер 3, колесная транспортная платформа 4 и сенсор касания поверхности 5. Исполнительными элементами, размещенными в контейнере 2, являются: микропроцессор оптимизатор ситуаций 6, элементы температурной стабилизации 7, электронный сенсор вертикали 8, крышка контейнера 9 (см. фиг. 1), аккумуляторная батарея 10, электронный сенсор заряда 11, система стереоскопического отображения 13, станция местной радиосвязи 15, механический включатель электропитания комплекса 17 (на фиг. 2 сеть электропитания комплекса не показана, но обозначена точкой "А").
На крышке контейнера 9 размещены: шаговый двигатель открытия 18 крышки контейнера, шаговый двигатель поворота 19 элементов солнечной батареи 20
Узел объективов 12, размещенный на стойке каркаса 1 (см. фиг. 1), имеет шаговый двигатель кругового обзора 21 объективов и шаговый двигатель секторного обзора 22. Между узлом объективов 12 и контейнером 2 на стойке каркаса 1 размещены средства укладки 16 строительных элементов (готовой продукции) (см. фиг. 1 и фиг. 8).
Трап 14 имеет электромеханическую защелку 23 и шаговый двигатель 24 для спуска/подъема трапа.
Бункер 3 для функторов имеет шаговый двигатель поворота 25 бункера и электромеханические фиксаторы 26 для фиксации функторов F1 и F2.
Функторы F1 и F2. снабжены ответчиками местной радиосвязи 32, микроконтроллерами 33, узлами электропитания с панелью солнечных элементов и аккумуляторной батареей 34, бункерами-накопителями 35. При этом узлы питания соединены с электронными сенсорами зарядки 37, шаговыми двигателями открытия крышки 38, шаговыми двигателями поворота крышки 39; бункеры-накопители 35 снабжены мотор-колесами 40, механическими сенсорами уровня грунта 41 в бункере-накопителе 35, функциональными инструментами: 66 винтовым конвейером с электродвигателем 42 конусной фрезой 65 узлом поворота 67 у функтора-грунтокопателя (см. фиг. 4) и пакет электродвигателей 42 шнеков экструдер-прессов у функтора 3D-печати (см. фиг. 6), 43 шаговым двигателем вертикального перемещения винтового конвейера 66 с электродвигателем 42 конусной фрезой 65 узлом поворота 67 у функтора-грунтокопателя F1 и пакет моторов 43 шнеков экструдер-прессов у функтора 3D-печати F2.
Функтор F2 дополнительно снабжен электронным сенсором температуры экструдера 44, шаговым двигателем перемещения пластины с воронками 45, пластиной с воронками 62.
На фиг. 3 представлена подробная схема электронного сенсора вертикали. В общей схеме роботизированного комплекса, показанной на фиг. 2, сенсор вертикали занимает 8 позицию. Он содержит чашу 47, поделенную на четыре равных сегмента. На шарнире 48, в центре окружности чаши, подвешен маятник 49. На внутренней поверхности чаши 47 равномерно расположены контактные площадки 50. Интервалы между ними характеризуют градусную меру сенсора вертикали 8. Выходы с контактных площадок 50 связаны с входами микроконтроллера 51. Сигналы каждого сегмента, поступающие на соответствующий вход микроконтроллера 51, соответствуют отклонению в сторону одного из четырех "географических" направлений космического объекта. Сигнал с контактной площадки расположенной на внутренней поверхности в центре чаши 47 соответствует отсутствию отклонения от вертикали. Сигналы поступают на микроконтроллер 51, который по соответствующей программе вычисляет в каком "географическом" направлении и на какой угол от вертикали отстоит контактная площадка, которой касается маятник. С выхода микроконтроллера 51 сигнал подается на вход 4 микропроцессора 6 (фиг. 2).
На фиг. 4 показаны конструктивные особенности функтора-грунтокопателя. В общей схеме роботизированного комплекса (фиг. 2) он представлен как F1. У него для функциональных действий имеется бункер-накопитель 35 (фиг. 4), помещенный на колесную основу со всеми ведущими колесами (мотор-колеса) 40, при этом бункер-накопитель 35 представляет собой треугольную пирамиду, основание которой опирается вершиной на колесную основу. Три остальных грани пирамиды жестко соединены со стойкой, опирающейся на колесную основу. Верхняя поперечная грань бункера накопителя 35 жестко соединена со статором шагового двигателя вертикального перемещения 43, а его ротор через передаточный механизм соединен с оболочкой винтового конвейера с электродвигателем 42 (см. фиг. 8). Для удобства понимания концы винтового конвейера маркированы К1 и К2. На фиг. 4 верхняя часть винтового конвейера показана укороченной. Внутри, в нижней части бункера-накопителя 35, расположен механический сенсор уровня 41 наполнения грунта.
С внешней стороны основания треугольной пирамиды (вертикальной стенки) бункера-накопителя 35 закреплен футляр 53, на его внешней стенке помещен электромеханический фиксатор 26 совмещенный с разъемным подключением S1 (см. фиг. 2) к источникам энергии комплекса - точка "А". В футляре 53 размещены: ответчик местной радиосвязи 32 (см. фиг. 2) для обмена адресно-командной информацией со станцией местной радиосвязи 15 (см. фиг. 2), микроконтроллер 33, узел электропитания 34 с панелью солнечных элементов и аккумуляторной батареей (см. фиг. 2), электронный сенсор зарядки 37 (см. фиг. 2).
Панели солнечных элементов расположены на внутренней стороне крышки 52. Она сочленена с вертикальной стенкой бункера-накопителя 35 шаговым двигателем открытия крышки 38 и шаговым двигателем поворота крышки 39.
На фиг. 5 показан функтор 3D-печати F2 (см. фиг. 2).
Функтор 3D-печати F2 для функциональных действий имеет размещенный с внешней стороны вертикальной стенки бункера-накопителя 35 футляр 53, на внешней стенке которого установлен электромеханический фиксатор 26 (совмещенный с разъемным подключением S2* к источникам энергии комплекса - точка "А" (см. фиг. 2)). В футляре 53 помещены: ответчик местной радиосвязи 32 для обмена адресно-командной информацией со станцией местной радиосвязи 15, микроконтроллер 33, узел электропитания 34 с панелью солнечных элементов и аккумуляторной батареей (панель солнечных элементов расположена на внутренней стороне крышки 52), электронный сенсор зарядки 37, крышка 52 с шаговым двигателем открытия крышки 38 и шаговым двигателем поворота крышки 39. Бункер-накопитель 35 помещен на колесную основу со всеми ведущими колесами (мотор-колеса) 40, профиль бункера-накопителя 35 - прямоугольник с подвижно присоединенным пакетом экструдинг-прессов с нагревателями 36. Они закреплены с внешней стороны днища бункера-накопителя 54 (фиг. 7), передвигаемого посредством шагового двигателя 46 (фиг. 5). Днище перемещается вдоль движения функтора. На внутренней стороне стенки бункера-накопителя 35 закреплен механический сенсор уровня наполнения грунта 41.
На фиг. 6 представлен экструдер с раздельным шнеком и с нагревателем. Экструдер с раздельным шнеком и нагревателем имеет электродвигатель 42 соединенный со шнеком 55, заключенным в гильзу 56, имеющей окно 57 и оканчивающейся эластичным соединением 58 с экструдером 59 с нагревателем 60 и головкой экструдера 61, шаговым двигателем изменения положения 43 в вертикальной плоскости экструдера 59. Перед головкой экструдера 61 установлен электронный сенсор температуры 44. В качестве основы сенсора может быть использован кремниевый диод, имеющий свойство при нагреве сохранять линейную характеристику в широком диапазоне температур.
На фиг. 7 показан пакет экструдинг-прессов 36 с торцовой стороны бункера-накопителя 35 функтора 3D-печати F2. Пакет экструдинг-прессов с нагревателями 36 имеет скользящий контакт с подвижным днищем 54 бункера-накопителя 35. Функтор 3D-печати F.2 в нижней кромке продольных стенок бункера-накопителя 35 имеет продольные пазы с двух сторон удерживающие подвижное днище 54, но не препятствующие продольному его перемещению. С нижней стороны подвижного днища в поперечном направлении прикреплена пластина 62 с продольными окнами управляемая шаговым двигателем 45, как одна электромеханическая задвижка. Между задвижкой и колесной основой со всеми ведущими колесами (мотор-колеса) 40 расположен пакет экструдинг-прессов с нагревателями 36, со шнеками 55, соприкасающимися между собой гильзами 56 и имеющими воронки 57, против которых в подвижном днище 54 имеются окна аналогичные окнам пластины 62.
На фиг. 8 представлен функциональный инструмент функтора F1, содержащий винтовой конвейер 66 с электродвигателем 42, окно конвейера 63 со стороны конца К1, окно конвейера 71 со стороны конца К2, шнек винтового конвейера 64, электродвигатель винтового конвейера 42 жестко закрепленный с валом и коническая фреза 65 также жестко закреплена с валом. Узел поворота 67 соединен с шаговым двигателем 68 и двумя запорными кольцами 69 и 70.
На фиг. 9 показана схема аппаратного решения режимов "сбор" и "выгруз". Винтовой конвейер 66 (см. фиг. 8) содержит коническую фрезу 65, разрыхляющую и заглубляющую рабочий инструмент в грунт. Узел поворота 67 с шаговым двигателем 68 и двумя запорными кольцами 69 и 70, обеспечивающих осевое совмещение оболочки К1 относительно с оболочкой К2 посредством шагового двигателя 68. Запорное кольцо 69 зафиксировано на оболочке К1 и замыкает камеру шагового двигателя 68. Запорное кольцо 70, зафиксированное на краю оболочки К2, исключает продольное расхождение оболочек.
На фиг. 10 представлены средства укладки 16 строительных элементов (готовой продукции). Средство укладки 16 имеет стрелу 31 с электромеханическим фиксатором, шаговый двигатель спуска/подъема троса с клещевым захватом 27, шаговый двигатель продольного перемещения тележки по стреле 28, шаговый двигатель поворота стрелы 29, шаговый двигатель подъема стрелы 30.
Принцип действия роботизированного комплекса
До старта космического корабля через вход 1 микропроцессора оптимизатора ситуаций 6 вводится изображение оптимального размещения оборудования роботизированного комплекса на космическом объекте СТ1 (см. фиг. 2). Часть памяти микропроцессора оптимизатора ситуаций 6 имеет базу данных с доступом по ключам. В базе данных содержатся ожидаемые оптимальные значения технических характеристик устройств роботизированного комплекса (скорость движения, производительность и пр.) и предусмотрена возможность внесения новых данных в реальных условиях. В памяти микропроцессора оптимизатора ситуаций 6 записаны индивидуальные позывные функторов в местной радиосвязи 15, значения начального положения исполнительных устройств: шаговых двигателей 21, 22 функционального узла объективов 12, значения цены делений горизонтальных углов и цены делений вертикальных углов системы стерео отображения 13. Калибровка выполняется до старта по параметрам известного объекта и известного до него расстояния (подобно калибровке артиллерийской стереотрубы ACT). Калибруются шаговый двигатель 24 трапа 14 для перехода на грунт, шаговый двигатель поворота 25 бункера 3, шаговые двигатели функтора F1:
- шаговый двигатель открытия (крышки) 38, шаговый двигатель поворота (крышки) 39, шаговый двигатель вертикального перемещения 43 винтового конвейера 66, шаговый двигатель узла поворота 68. Калибруются шаговые двигатели функтора F2:
- шаговый двигатель открытия крышки 38, шаговый двигатель поворота крышки 39, шаговый двигатель изменения положения в вертикальной головке экструдера 59, шаговый двигатель 45 управляющий пластиной 62, шаговый двигатель 46 передвижения днища 54 бункера-накопителя.
Калибруются шаговые двигатели 27, 28 грузовой тележки и 29, 30 стрелы средства укладки 16.
Проверяются и заносятся в базу микропроцессора оптимизатора ситуаций 6 исходные состояния "зафиксировано" электромеханических средств фиксации: 23, 26, 31, 41, 45, исходное состояние подключения электродвигателя 42 винтового конвейера 66 функтора F1 в режиме "сбор". В начальном состоянии зафиксирован шаговый двигатель вертикального перемещения 43 винтового конвейера 66 и шаговый двигатель узла поворота 67 винтового конвейера 66 (см. фиг. 8). На фиг. 8 окно оболочки 63 находится в положении "сбор".
Проверяются и заносятся в базу микропроцессора оптимизатора ситуаций 6 состояния узлов функтора F2:
1) шаговый двигатель 46 перемещения днища бункера 54 в начальном положении изготовления строительного элемента;
2) шаговый двигатель изменения положения в вертикальной плоскости 43 головок экструдеров экструдинг-прессов с нагревателем 36, установленных на экструдирование первого слоя строительного элемента.
Проверяется полная заряженность аккумуляторной батареи 10 сети электропитания комплекса и отсутствие питания в точке "А".
При приближении посадочного модуля к поверхности грунта космического объекта у роботизированного комплекса срабатывает сенсор касания 5 (см. фиг. 1), в котором механический включатель 17 срабатывает и соединяет его электрический вход 1 с выходами 1 и 2, что приводит к соединению выхода 1 включателя 17 с входом 2 микропроцессора оптимизатора ситуаций 6, а также происходит подключение аккумуляторной батареи 10 к общей сети энергообеспечения всего комплекса (см. фиг. 2). При этом вход 5 микропроцессора оптимизатора ситуаций 6, соединенный с выходом электронного сенсора заряда 11, обеспечивает поступление данных о величине заряда аккумуляторной батареи 10, что позволяет сравнивать их заряды и автоматически регулировать энергообеспечение комплекса.
Температурный режим в контейнере 2 обеспечивает температурный стабилизатор 7, сигналы с которого поступают на вход 3 микропроцессора оптимизатора ситуаци 6.
Вертикальное положение посадочного модуля обеспечивает электронный сенсор вертикали 8. С его выхода (см. фиг. 2 и фиг. 3) сигналы поступают на вход 4 микропроцессора оптимизатора ситуаций 6. Для минимизации величины отклонения от вертикального положения роботизированный комплекс (см. фиг. 1), перемещаясь в пространстве в соответствии с сигналами от системы стереоскопического отображения 13 в районе посадки, уточняет свое место положения.
На основании полученной информации микропроцессор оптимизатор ситуаций 6 "оценивает", если место положения оказалось в пределах заданных критериев, то можно "переходить" к выбору места разгрузки. Для ее решения с выхода 3 микропроцессора оптимизатора ситуаций 6 поступает команда кругового обзора местности на вход 1 шагового двигателя кругового обзора 21 узла объективов 12, а с выхода 4 микропроцессора оптимизатора ситуаций 6 на вход 2 двигателя секторного обзора 22 поступает команда обзора в вертикальном секторе от +30° до -75°. С выхода функционального узла объективов 12 информационные сигналы поступают на вход системы стереоскопического отображения 13, с ее выхода на вход 7 микропроцессора оптимизатора ситуаций 6. В микропроцессоре оптимизатора ситуаций 6 осуществляется сравнение полученного реального стереоскопического отображения окрестности места нахождения посадочного модуля 1 с изображением, заложенным в базу данных комплекса для оптимального размещения рабочего оборудования, т.е. функторов F1, F2 и места размещения строительных элементов (готовой продукции). В этом случае программно формируется электронная карта работ, решаются задачи топографической привязки и конфигурации территории визуально пригодной (без каменистых включений) для сбора реголита. Причем солнечные батареи посадочного модуля и функторов должны быть ориентированы по отношению к Солнцу в удобном направлении для обеспечения подзарядки аккумуляторов. Кроме того, место работы функтора F2 в режиме "спек" должно быть в секторе доступности средств укладки 16. Место работы функтора F1 в режиме "сбор" большей частью определяется направлением на Солнце.
На основании полученной информации микропроцессор 6, "оценив" ситуацию о месте нахождения модуля (см. фиг. 1) как положительную, т.е. соответствует пределам заданных критериев, подает с выхода 5 на вход колесной транспортной платформы 4 сигнал о включении программы выгрузки функторов F1 и F2 к месту работы.
На месте выполнения работы микропроцессор оптимизатор ситуаций 6 по сигналу, поступающего на вход 5 с выхода сенсора заряда 11 в сети 17 (точка "А"), решает задачу о необходимости открытия крышки 9 контейнера 2 (см. фиг. 1). Затем микропроцессор оптимизатор ситуаций 6 сигналами с выхода 1 открывает шаговым двигателем 18 солнечной батареи 20, сигналами с выхода 2 шаговым двигателем поворота 19 наводит элементы солнечной батареи 20 на оптимальный режим их работы. Выход элементов солнечной батареи 20 крышки 9 контейнера 2 соединен через разъемное соединение S1 (см. фиг. 2) с входом 1 узла электропитания с панелью солнечных элементов и аккумуляторной батареей 34 функторов F1 и F2. От солнечных элементов заряжаются все объекты роботизированного комплекса.
По сигналу с выхода сенсора заряда 11 передается сигнал на вход 5 микропроцессора оптимизатора ситуаций 6, в котором на выходе 6 формируется команда и поступает на вход 1 электромеханической защелки 23. Эта команда снимает механическое удержание свободного конца трапа 14 (см. фиг. 1) и с выхода 7 микропроцессора оптимизатора ситуаций 6 на вход 2 шагового двигателя трапа 24 (см. фиг. 2) поступает команда установки трапа 14 для обеспечения выхода функторов F1 и F2 (см. фиг. 1) на грунт. Для совмещения положения трапа 14 с траекторией движения конкретного функтора F1 или F2 во время их выгрузки с выхода 8 микропроцессора оптимизатора ситуаций 6 на вход 1 шагового двигателя поворота 25 (см. фиг. 2) поступает сигнал управления для поворота бункера 3 (см. фиг. 1).
Дистанционное управление энергетическим ресурсом функторов F1 и F2 обеспечивается в следующем порядке: электронный сенсор зарядки аккумуляторной батареи 37 контролирует ее состояние. При снижении потенциала на заданную величину сенсор 37 дает сигнал на вход 2 микроконтроллера 33 (см. фиг. 2) для формирования команды-процедуры управления крышкой 52 функторов F1 или F2 бункера-накопителя 35 (см. фиг. 4 и 5). С помощью шагового двигателя открытия крышки 38 и шагового двигателя поворота 39 микроконтроллер 33 осуществляет управление панелью солнечных элементов и соответственно потенциалом аккумуляторной батареи 34. При достижении должного потенциала сенсор зарядки аккумуляторной батареи 37 отключает выполняемую процедуру и по запросу "помощь" завершает работу по управлению узлом электропитания.
Дистанционное управление устройствами бункера 3 осуществляется по цепочке (см. фиг. 2): адресная команда-процедура с выхода 9 микропроцессора оптимизатора ситуаций 6 поступает на вход 1 станции местной радиосвязи 15, а с ее выхода 1 поступает на вход 1 ответчика местной радиосвязи 32 функтора F1 или F2. С выхода 1 функтора F1 или F2 сигнал поступает на вход 1 микроконтроллера 33 соответствующего функтора. Ответ с выхода 1 микроконтроллера 33 поступает на вход 2 ответчика местной радиосвязи 32 - с его выхода 2 идет ответ - на вход 2 станции местной радиосвязи 15, ас ее выхода 2 - на вход 6 микропроцессора оптимизатора ситуаций 6. При дистанционном управлении используется протокол: прием функтором F* к исполнению команды подтверждается адресным ответным сигналом ответчика функтора F*.
В случае поступления новой команды во время выполнения функтором F* предыдущей команды происходит прерывание и формируется сообщение о ее задержке, соответствующее запросу "помощь". По запросу "помощь" микропроцессор оптимизатор ситуаций 6 вычисляет решение и управляет действиями выхода из сложившейся ситуации, т.е. уточняет действия функтора F*.
Для автономных перемещений функторов F1 и F2 имеется перечень команд-процедур: «переезд», "вперед", "назад", "поворот налево", "поворот направо", "стоп", "отступ". Они включают все указания для корректного выполнения заданий, используя реальное стереоскопическое отображение места нахождения функторов.***
Функтор-грунтокопатель F1 имеет две основные функциональные команды-процедуры: 1) команда-процедура "сбор" и 2) команда-процедура "выгруз". Критерием их выполнения служат сигналы с механического сенсора уровня грунта 41 бункера-накопителя 35 "полно"/"пусто" с учетом зафиксированного начального состояния шагового двигателя 43 бункера-накопителя 35 (см. фиг. 4). Критерием выполнения 1) команды-процедуры "сбор" служит сигнал с выхода 5 микроконтроллера 33 (см. фиг 2). Микроконтроллер 33 функтора F1, на время выполнения команды-процедуры "сбор", блокирует вход 2 от прохождения сигнала с выхода 1 с электронного сенсора зарядки 37 (см. фиг. 2). Затем с выхода 2 микроконтроллера 33 на вход 2 шагового двигателя открытия 38 (см. фиг. 2 и фиг. 4) поступает сигнал на открытие крышки 52 в вертикальное положение (см. фиг. 9) так, чтобы она не мешала направлению траектории движения реголита в бункер-накопитель 35, поступающего из винтового конвейера 66 через окно конвейера 71 (см. фиг. 8). Конец К2 траектории отмечен литерой "Б" (см. фиг. 9). Сигнал с выхода 5 микроконтроллера 33, поступая на вход 3 мотора винтового конвейера 42 (см. фиг. 8), включает винтовой конвейер 66 и конусная фреза 65 обеспечивает его погружение в реголит. Сигнал начала команды-процедуры "вперед", поступающий с выхода 4 микроконтроллера 33 на вход 1 мотор-колес 40 бункера-накопителя 35 функтора F1, обеспечивает перемещение функтора по ходу забора реголита (конец К1 внизу см. фиг. 4, фиг. 9) и происходит заполнение бункера-накопителя 35. Сигнал "полно" с выхода 2 механического сенсора уровня 41 (см. фиг. 2, фиг. 4, фиг. 9) бункера-накопителя 35 поступает на вход 3 микроконтроллера 33. По этому сигналу с выхода 5 микроконтроллера 33 поступает сигнал на вход 3 электродвигателя 42 винтового конвейера 66, (см. фиг. 2, фиг. 8) и выключает его действие. С выхода 6 микроконтроллера 33 на вход 4 шагового двигателя 43 для вертикального перемещения функционального инструмента 66 (см. фиг. 4) подается команда, переводящая его в положение "выгруз", т.е. конец К1 занимает верхнее положение (см. фиг. 9). Сигнал с выхода 7 микроконтроллера 33 поступает на вход 5 шагового двигателя 68 и поворачивает окно оболочки 63 конца К1 на 180° относительно продольной оси (см. фиг. 9). Затем с выхода 3 и с выхода 2 микроконтроллера 33 сигналы поступают на входы 3 и 2 шаговых двигателей поворота и открытия 38 и 39 крышки 52 (см. фиг. 4) и закрывают ее. Микроконтроллер 33 деблокирует вход 2 и тем самым пропускает сигнал с выхода 1 электронного сенсора 37 (см. фиг. 2) в микроконтроллер 33, который с выхода 1 подает сигнал на вход 2 ответчика локальной радиосвязи 32 с запросом о "помощи" и «переезде» (см. фиг. 2).
Ответчик 32 с выхода 2 подает сигнал на вход 2 станции местной радиосвязи 15, которая транслирует его на вход 6 микропроцессора оптимизатора ситуаций 6. Микропроцессор 6 в соответствии с заданным алгоритмом подает сигнал на вход 1 шагового двигателя кругового обзора 21 узла объективов 12. Получаемая информация с выходов объективов 12 через систему стереоскопического отображения 13 поступает на вход 7 микропроцессора 6, который строит электронную карту работ, связанную с расположением функторов F1 и F2, а также вычисляет траекторию (трассу) движения F1 в направлении F2. После вычисления траектории микропроцессор 6 с помощью станции местной радиосвязи 15 и ответчика 32 передает через микроконтроллер 33 с выхода 4 на вход 1 мотор-колес 40 функтора F1 команду «вперед». Функтор начинает движение, а объективы 12 и система стереоскопического отображения 13 контролируют его перемещение в соответствии с электронной картой работ и вычисленной траекторией. При отклонении от маршрута микропроцессор 6, используя команды «поворот влево» и «поворот вправо» корректирует путь движения F1 в сторону F2. Конец К1 винтового конвейера 66, занимая верхнее положение, является ориентиром для совмещения функторов F1 и F2 по направлению и расстоянию между ними. При достижении расстояния между функторами F1 и F2 меньше длины плеча винтового конвейера 66 от шагового двигателя 43 (см. фиг. 9) до конца К1 микропроцессор 6 вырабатывает команду «стоп», которая посредством станции местной радиосвязи 15 и ответчика 32 поступает в микроконтроллер 33, который через выход 4 дает сигнал на остановку работы мотор-колес 40.
После остановки функтора-грунтокопателя F1 микроконтроллер 33 с выхода 5 переключает электродвигатель 42 в реверсный режим работы винтового конвейера 66 и реголит из винтового конвейера (конец К1) поступает из бункера-накопителя 35 в бункер-накопитель 35 F2 (см. фиг. 2, фиг. 4 и фиг. 9). Механический сенсор уровня 41 отслеживает ситуацию и при достижении уровня «пусто» через выход 2 подает на вход 3 микроконтроллера 33 сигнал, по которому функтор F1 выдает запрос "помощь", а микропроцессор оптимизатор ситуаций 6 оценивая дальнейшие действия вычисляет и передает адресную команду-процедуру по дальнейшим действиям функтору F1, а также координирует действия функтора F2.
Функтор 3D-печати F2 имеет две последовательно выполняемые функциональные команды-процедуры - 1) команда-процедура "спек" и 2) команда-процедура "разрыв-помощь", связанные с изготовлением из реголита строительных изделий на основе технологии экструзии. Размеры строительного элемента (спека) задаются числом шагов шагового двигателя 46 - длина и числом шагов шагового двигателя 43 - толщина изделия (см. фиг. 5).
Технология "спек" реализуется функтором 3D-печати F2 при наличии трех сигналов: 1) сигнал "полно", поступающий с выхода 2 механического сенсора уровня грунта 41 в бункере-накопителе 35 (см. фиг. 5); 2) сигнал с электронного сенсора температуры экструдера 44 о разогреве пакета экструдинг-прессов с нагревателями 36 до необходимой температуры; 3) сигнал о положении шагового двигателя 45 соответствующего тому, что электромеханическая задвижка 62 находится в закрытом состоянии (см. фиг. 5 и фиг. 7).
Команда-процедура "спек" выполняется так: с выхода 7 микроконтроллера 33 функтора F2 на вход 2 привода 45 поступает команда "открыть" электромеханическую задвижку 62 (см. фиг. 7). Привод 45 перемещает задвижку относительно днища 54, размещенного в продольных пазах бункера-накопителя 35. При этом открываются отверстия воронок 57 (см. фиг. 6 и фиг. 7). Одновременно команда с выхода 5 микроконтроллера 33 функтора F2 поступает на вход 3 мотора функционального инструмента 42, находящегося в бункере-накопителе 35, и включает в работу двигатель 42 (см. фиг. 6) и разогрев пакета экструдинг-прессов с нагревателями 36 (см. фиг. 2 и фиг. 5). При достижении заданной температуры на выходе 1 электронного сенсора экструдера 44 функтора F2 (см. фиг. 6) появляется сигнал "готов", который поступает на вход 4 микроконтроллера 33 (см. фиг. 2). Одновременно с выхода 8 микроконтроллера 33 поступают сигналы-команды на вход 3 шагового двигателя 46 (см. фиг. 5) для продольного изготовления спека. При достижении числа шагов шагового двигателя 46 заданного размера "длины" строительного элемента на выходе 6 микроконтроллера 33 формируется сигнал-команда на вход 4 функционального инструмента 43. Он изменяет состояние шагового двигателя вертикального перемещения 43 пакета экструдинг-прессов с нагревателями 36 на один шаг по высоте, т.е. состоялось наращивание спека по толщине. Сигнал-команда с выхода 8 микроконтроллера 33, поступающая на вход 3 шагового двигателя 46, возвращает пакет экструдинг-прессов с нагревателями 36 в исходное положение и процедура продолжается до тех пор, пока шаговый двигатель вертикального перемещения функционального инструмента 43 не достигнет заданный размер "высоты" строительного элемента. При достижении заданного размера в микроконтроллере 33 формируется команда "разрыв-помощь" и передается по местной радиосвязи 15 на вход 6 микропроцессора оптимизатор ситуаций 6.
Все время микропроцессор оптимизатор ситуаций 6 ведет учет числа запросов "разрыв-помощь" от функтора F2 (оценивая количество реголита в бункере-накопителе 35 функтора F2). Если реголита достаточно для продолжения работ по запросу "разрыв-помощь" микропроцессор оптимизатор ситуаций 6 посылает адресный сигнал-команду "отступ" поступающую на вход 1 мотор-колес 40 функтора (см. фиг. 2 и фиг. 7). выполняемый функтором F2 как движение в сторону противоположную разъемному подключению функторов S* на ~0,5 сек. для создания разрыва между строительными элементами и формирует команду-процедуру изготовления следующего спека.
При достижении числа запросов "разрыв-помощь" достигает числа, когда реголита в бункере-накопителе 35 функтора F2 остается недостаточно для изготовления очередного строительного элемента, микропроцессор оптимизатор ситуаций 6 "решает" перемещать оборудование роботизированного комплекса на другом место работы или требуется продолжение изготовления строительных элементов и формирует команды-процедуры процесса для совместного действия F1 и F2, заложенные алгоритмом.
Средства укладки 16
Принимая решение о смене места продолжения работ после завершения функтором F2 исполнения последней команды-процедуры изготовления строительного элемента, на основании запроса от F2 "разрыв-помощь" (это соответствует тому, что шаговые двигатели 43 и 46 находятся в состоянии готовности к последующей работе), микропроцессор оптимизатор ситуаций 6 через станцию местной радио связи 15 посылает адресную команду-процедуру "отступ", после нее команду-процедуру на приведение устройств функтора F2 в исходное состояние.
По команде-процедуре «исходное состояние» с выхода 5 микроконтроллера 33 на вход 3 электродвигателя функционального инструмента 42 (см. фиг. 6) выдается сигнал-команда "останов" бункера-накопителя 35. Затем с выхода 7 микроконтроллера 33 на вход 2 двигателя 45 пакета экструдинг-прессов с нагревателями 36 выдается сигнал-команда "закрыть" электромеханическую задвижку воронки. По этой команде отключается разогрев пакета экструдинг-прессов с нагревателями 36. Сигнал на входе 4 микроконтроллера 33 поступающий с выхода 1 электронного сенсора температуры экструдера 44 (см. фиг. 6) пакета экструдинг-прессов с нагревателями 36 (см. фиг. 5) падает ниже допустимого значения и микроконтроллер 33 посылает запрос "помощь", что служит для микропроцессора оптимизатора ситуаций 6 сигналом, что устройства функтора F2 приведены в исходное состояние.
Конструктивно средства укладки 16 (см. фиг. 1, фиг. 2 и фиг. 10). построены по схеме запасовки грузового каната башенного крана с грузовой тележкой на стреле. С этой целью неподвижный конец каната грузового полиспаста крепится у основания стрелы, а подвижные блоки полиспаста находятся на грузовой тележке, перемещающейся по стреле. Средства укладки 16 имеют три функциональные команды-процедуры:
1) перевод средства укладки в состояние "работа";
2) выполнение перемещения готовых строительных элементов "укладка";
3) перевод средства укладки в транспортное состояние "переезд".
Все они являются вычислительными процедурами микропроцессора оптимизатора ситуаций 6 основанные на сигналах обслуживающих его сенсорные системы (электронного сенсора вертикали 8, узла объективов 12 с системой стереоскопического отображения 13).
Команда-процедура "работа" начинается с сигнала, который формируется на выходе 15 микропроцессора оптимизатора ситуации 6, поступает на вход 5 электромеханического фиксатора 31 средства укладки 16 и освобождает дистальный конец стрелы (см. фиг. 1). По сигналу с выхода электронного сенсора вертикали 8, поступающего на вход 4 микропроцессора оптимизатора ситуации 6, формируется команда с выхода 14 на вход 4 шагового двигателя подъема 30 средства укладки 16 для подъема дистального конца стрелы до горизонтального уровня.
Команда-процедура "укладка" вычисляется на основании данных полученных с выхода системы стереоскопического обозрения 13, поступающих на вход 7 микропроцессора оптимизатора ситуации 6. Далее с выхода 13 микропроцессора 6 сигналы воздействуют на вход 3 шагового двигателя поворота стрелы 29 средства укладки 16. С выхода 12 микропроцессора оптимизатора ситуации 6 команда, поступающая на вход 2 шагового двигателя 28, выполняет продольное перемещение тележки по стреле средства укладки 16, а команды с выхода 11 микропроцессора оптимизатора ситуации 6, поступающие на вход 1 шагового двигателя 27, осуществляют спуск и подъем троса с клещевым захватом для перемещения строительных элементов. По данным с выхода системы стереоскопического отображения 13 поступающим на вход 7 микропроцессора оптимизатора ситуации 6, выполняется управление поворотом стрелы и поштучное пакетирование строительных элементов в соответствии с электронной картой работ.
Команда-процедура перевода средства укладки 16 в состояние "переезд" в соответствии с электронной картой работ и "решения" микропроцессора оптимизатора ситуаций 6 выполняется процедура "переезд". После прекращения работы функторов, выполнения процедуры "переезд" и погрузки их в бункер 3 выполняется команда его фиксации, затем подъем и фиксация трапа с помощью электромеханической защелки 23.
Функторы функционируют по полученным командам-процедурам. На случай нарушения работы программного обеспечения микроконтроллера 33 возможна его перезагрузка по линии местной радиосвязи. Переезд посадочного модуля обеспечивается командой с выхода 5 микропроцессора оптимизатора ситуаций 6 сигналами на вход мотор-колес колесной транспортной платформы 4 (см. фиг. 1). Управление ее движением осуществляется в соответствии с электронной картой работ, контролируемым микропроцессором 6 по данным поступающим на его вход 7 с выхода системы стереоскопического отображения 13.
Подтверждение достижения технического результата.
В роботизированном комплексе для формирования строительных элементов на космическом объекте основным элементом является микропроцессор 6, обеспечивающий управление технологическими процессами в соответствии с количеством функциональных возможностей функторов и средств укладки 16. Наличие станции местной радиосвязи 15 не ограничено единственным вариантом исполнения задания. Учет реальных условий окрестностей места посадки, в ходе выполнения решаемой задачи, при использовании 3D экструзивного метода представляется возможность изготовления спека из местного реголита с использованием энергии солнечных батарей и аккумуляторов. Возможности средств укладки 16 подтверждают реализуемость предложенного технического решения на космическом объекте без участия наблюдателя.
В посадочном модуле космического аппарата стрела средств укладки 16 возможна длинной до 7 м. Габаритные размеры космического отсека позволяют в бункере 3 поместить до двух десятков функторов с шириной колеи каждого 25 см, емкости бункера-накопителя функтора-грунтокопателя 20 дм3, емкости бункера-накопителя функтора 3D-печати 15,2 дм3. Их технические возможности можно охарактеризовать следующими величинами.
Функтор 3D-печати может создавать параллельно по два строительных элемента стандартного размера строительного кирпича 250×114×71 мм за время 10 мин, расходуя на их изготовление 7,2 дм3 реголита. Функтор-грунтокопатель на заполнение реголитом своего бункера-накопителя, перемещение и выгрузку реголита в бункер-накопитель функтора 3D-печати выполнит за ~43 сек. Средства укладки 16, перемещая поштучно, один строительный элемент - захват клещевым захватом, подъем, перенос и укладка в стопку выполнят за время 2,5÷3 мин. При указанных технических возможностях и учете того, что скорость средств перемещения мотор-колес ~0,5 м/сек (по данным "Луноход 1"), микропроцессор оптимизатор ситуаций 6 рассчитывает команды-процедуры в зависимости от конкретной задачи. Представленный анализ свидетельствует о возможности создания бригады функторов.
Использование описанной в прототипе армированной, раздуваемой в вакууме оболочки, позволит расширить возможности создания других строительных элементов и сооружения из них объектов различной конфигурации и назначения без ограничения в расходуемом сырье и источнике солнечной энергии. В случаях попадания функторов в условия лунной ночи, возможна перезагрузка программного обеспечения микроконтроллера функтора по линии местной радиосвязи.
Заявляемое устройство не ограничено в расходуемом сырье и в обеспечении энергией для выполнения работ. Благодаря транспортной платформе оно мобильно и, по сравнению с известными техническими решениями, обладает следующими преимуществами:
- расширены функциональные возможности оборудования, размещенного на посадочном модуле космического аппарата и выполняющего работу с реголитом в условиях космического вакуума;
- обеспечена вариабельность решаемых заданий благодаря изготовлению стандартных строительных элементов;
- реализована возможность оптимизации решаемой задачи в реальных условиях посадки посадочного модуля космического аппарата;
- различие производительности используемых устройств повышает гибкость решения задачи во времени;
- обеспечена автономность выполнения заданных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ ВЫСОКОТОЧНОГО ОРУЖИЯ | 2015 |
|
RU2596173C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2014 |
|
RU2554283C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ПО СОРТИРОВКЕ ИСПОЛЬЗОВАННОЙ ТАРЫ | 2021 |
|
RU2782408C1 |
| КОЛЛАБОРАТИВНЫЙ РОБОТИЗИРОВАННЫЙ УЧАСТОК ПЕРЕСЧЕТА ДЕНЕЖНОЙ НАЛИЧНОСТИ | 2018 |
|
RU2697316C1 |
| ЖИЛИЩНО-ПРОИЗВОДСТВЕННАЯ ВЕРТИКАЛЬНАЯ ФЕРМА | 2010 |
|
RU2436917C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ ВОДЯНОГО ПАРА НА ЛУНЕ | 2022 |
|
RU2775188C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2013 |
|
RU2549606C2 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности высоковольтных ЛЭП с применением беспилотных летательных аппаратов | 2024 |
|
RU2829914C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ХАРАКТЕРИСТИК СОЛНЕЧНЫХ БАТАРЕЙ В УСЛОВИЯХ ДЕЙСТВИЯ ФАКТОРОВ КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2024 |
|
RU2839708C1 |

Изобретение относится к космической технологии, а именно к созданию строительных элементов на космическом объекте. Роботизированный комплекс для создания строительных элементов включает исполнительное оборудование с каркасом, транспортную платформу с роботами и источники энергии комплекса. Комплекс имеет источники энергии, элементы температурной стабилизации. Питание рабочего оборудования соединено с сенсором достижения поверхности космического объекта. Микропроцессорный оптимизатор ситуаций, электронный сенсор вертикали, а также фрагменты системы стереоскопического отображения окрестности места и станция местной радиосвязи размещены в контейнере с крышкой. В бункере размещены автономные роботы-функторы, снабжённые двунаправленной адресной командной связью и персональными позывными, а также микроконтроллерами и автономными источниками питания. Бункер размещён между контейнером и транспортной платформой. На каркасе размещены средства укладки строительных элементов. Техническим результатом изобретения является расширение функциональных возможностей комплекса, обеспечение автономности выполнения работ. 5 з.п. ф-лы, 10 ил.
1. Роботизированный комплекс для создания строительных элементов на космическом объекте, включающий исполнительное оборудование с каркасом, транспортную платформу с роботами и источники энергии комплекса, отличающийся тем, что источники энергии, включающие аккумуляторные батареи, элементы солнечной батареи и элементы температурной стабилизации, исполнительное оборудование, соединены с сенсором достижения поверхности космического объекта, микропроцессорный оптимизатор ситуаций, электронный сенсор вертикали, а также фрагменты системы стереоскопического отображения окрестности места и станция местной радиосвязи размещены в контейнере с крышкой, узел объективов, связанный с системой стереоскопического отображения, размещен на каркасе средств доставки, бункер автономных роботов-функторов, снабженных двунаправленной адресной командной связью и персональными позывными, а также микроконтроллерами и автономными источниками питания, размещен между контейнером и транспортной платформой, на каркасе также размещены средства укладки строительных элементов.
2. Роботизированный комплекс по п. 1, отличающийся тем, что на транспортной платформе имеется бункер автономных роботов-функторов.
3. Роботизированный комплекс по пп. 1 и 2, отличающийся тем, что в основании бункера автономных роботов-функторов установлен шарнирно закрепленный трап для их перехода из бункера на поверхность грунта.
4. Роботизированный комплекс по пп. 1 и 2, отличающийся тем, что функтор-грунтокопатель, размещенный в бункере, связан с источниками энергии комплекса, снабжен приемопередатчиком для обмена адресно-командной информацией со станцией местной радиосвязи и микроконтроллером, обеспечивающим управление автономными источниками электропитания, механизмами перемещения функторов-грунтокопателей и функциональными действиями их рабочих инструментов.
5. Роботизированный комплекс по пп. 1, 2 и 4, отличающийся тем, что функтор-грунтокопатель имеет комплект рабочего инструмента, соответствующего функциональному назначению и закрепленного на бункере-накопителе.
6. Роботизированный комплекс по пп. 1, 2, 4 и 5, отличающийся тем, что функтор-3D печати имеет бункер-накопитель, снабженный пакетом экструдинг-прессов с нагревателями.
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ОБЪЕМНЫХ ДЕТАЛЕЙ И КОНСТРУКЦИЙ В КОСМИЧЕСКОМ ПРОСТРАНСТВЕ | 2010 |
|
RU2438939C2 |
| US 7168935 B1, 30.01.2007 | |||
| Токарный резец | 1924 |
|
SU2016A1 |

