ОБЛАСТЬ ТЕХНИКИ
[001] Данное техническое решение, в общем, относится к автоматизации процесса пересчета, сортировки и упаковки денежной наличности в кассово-инкассаторских центрах, а в частности, к коллаборативным роботизированным участкам пересчета денежной наличности.
УРОВЕНЬ ТЕХНИКИ
[002] Наиболее близким к заявленному техническому решению является роботизированный счетно-сортировальный комплекс, который представляет собой корпус, внутри которого расположены счетно-сортировальные машины, промышленный робот-манипулятор и компоненты по проведению счетно-сортировальных операций. Корпус выполнен в виде защитных панелей, соединенных друг с другом посредством стыковочных узлов (см. патент RU №262248, опубл. 15.06.2017). Наличие защитного ограждения обеспечивает безопасность обслуживающего персонала.
[003] Недостатком использования промышленного робота-манипулятора является установка последнего в специальную ячейку, огороженную блокирующим устройством. Использование защитных ограждений обеспечивает недоступность обслуживающего персонала к промышленному роботу-манипулятору, функционирующему в режиме исполнения программы, а также к оборудованию и модулям роботизированного комплекса. Кроме того, из-за конструкции предлагаемого технического решения, в случае штатных сбойных ситуаций на оборудовании (например, замятие купюры на какой-либо ССМ или замена расходного материала на упаковщике), которые подразумевают вмешательство оператора, последнему необходимо осуществить вход в такую ячейку для восстановления работоспособности оборудования. Вследствие этого промышленный робот-манипулятор прекращает движение и происходит полная остановка процесса пересчета, сортировки и упаковки денежной наличности, что приводит к уменьшению общей производительности роботизированного участка пересчета денежной наличности.
[004] Применение механического ограждения рабочей зоны накладывает ограничения на общую мобильность производства и невозможность быстрой интеграции роботизированной ячейки с оборудованием разных производителей счетно-сортировальных машин без внесения изменений в конструкцию роботизированного комплекса. Данный недостаток также обусловлен применением роботизированного манипулятора промышленного типа, который может причинить вред рабочему персоналу в случае отсутствия специализированных ограждающих и/или защитных элементов области его функционирования.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
[0001] Решаемой технической проблемой или задачей является устранение существующих недостатков аналогичных решений, известных из уровня техники.
[0002] Техническим результатом, проявляющимся при решении вышеуказанной проблемы, является обеспечение непрерывности процесса пересчета, сортировки и упаковки денежной наличности, выполняемых на коллаборативном роботизированном участке пересчета денежной наличности.
[0003] Дополнительным проявляющимся техническим результатом является повышение легкодоступности обслуживающего персонала к модулям системы в случае штатных сбойных ситуаций при отсутствии необходимости остановки работы роботизированного участка пересчета (далее - РУП), что также обеспечивает повышение производительности комплекса и отказоустойчивости коллаборативного РУП.
[0004] Технический результат достигается за счет реализации роботизированного участка пересчета для выполнения счетно-сортировальных операций денежных средств, который содержит
пространственную конструкцию в виде платформы, на которой по центру размещен по меньшей мере один коллаборативный робот-манипулятор с рабочим органом в виде захвата, обеспечивающий перемещение денежных средств между элементами участка в по меньшей мере шести степенях свободы, при этом на платформе также расположены
по меньшей мере одна счетно-сортировочная машина (ССМ),
по меньшей мере один накопитель подачи паллет с денежной наличностью,
по меньшей мере один накопитель сброса пустых паллет и
по меньшей мере два упаковщика купюр, выполненных с возможностью обандероливания корешков пачек купюр,
причем рабочая зона коллаборативного робота-манипулятора обеспечивает минимальное перемещение между элементами участка, и элементы участка расположены таким образом, чтобы обеспечивать доступ к ним персонала без прекращения работы коллаборативного робота-манипулятора.
[0005] В одном из частных примеров реализации ССМ содержит один приемный карман, по меньшей мере один карман отбраковки и по меньшей мере четыре сортировочных кармана.
[0006] В другом частном примере реализации коллаборативный робот-манипулятор установлен на стойке основании.
[0007] В другом частном примере реализации платформа содержит боковые стойки.
[0008] В другом частном примере реализации коллаборативный робот-манипулятор расположен на боковых стойках в вертикальной части.
[0009] В другом частном примере реализации коллаборативный робот-манипулятор закреплен на балке или подвесе.
[0010] В другом частном примере реализации ССМ установлена на поддерживающем элементе, соединенным с платформой.
[0011] В другом частном примере реализации элемент представляет собой подставку, стол или кронштейн.
[0012] В другом частном примере реализации накопитель подачи паллет с денежной наличностью и накопитель сброса пустых паллет закреплены к платформе.
[0013] В другом частном примере реализации каждый из упаковщиков упаковщики установлен на поддерживающем элементе, соединенным с боковой стойкой.
[0014] В другом частном примере реализации элемент представляет собой подставку или кронштейн.
[0015] В другом частном примере реализации коллаборативный робот-манипулятор содержит блок управления.
[0016] В другом частном примере реализации блок управления связан с системой контроля работоспособности элементов участка.
[0017] В другом частном примере реализации при выходе из строя или фиксации нарушения рабочего процесса по меньшей мере одного элемента участка, система контроля передает сигнал в блок управления коллаборативного робота-манипулятора.
[0018] В другом частном примере реализации блок управления формирует команду на изменение режима работы коллаборативного робота-манипулятора.
[0019] Коллаборативный робота-манипулятор предназначен специально для совместной работы с людьми, при этом оборудование РУП установлено относительно манипулятора таким образом, чтобы он мог обеспечивать свободное перемещение между ним без блокирования доступа персонала при необходимости осуществления процедур технического обслуживания. При его применении не требуется никаких защитных ограждений, что влечет за собой минимизацию выделенных производственных площадей и огораживания периметра безопасности, предоставляя возможным работу в непосредственной близости с человеком.
[0020] Отсутствие защитных барьеров обеспечивает свободный, удобный и безопасный доступ обслуживающего персонала к отдельным модулям системы без полной остановки роботизированной ячейки, что позволяет не нарушать целостности процессов по пересчету и способствует непрерывной работе с потоком денежной наличности.
[0021] Отсутствие механических ограждений и ограничений на рабочую зону коллаборативного робота-манипулятора позволяет одновременную интеграцию в ячейку счетно-сортировальных машины различных производителей без изменений в конструкции коллаборативного роботизированного комплекса.
[0022] Коллаборативный режим позволяет реализовать автономный и совместный режим работы на роботизированном участке пересчета денежной наличности.
[0023] При автономном режиме все операции по пересчету, сортировки и упаковки денежной наличности осуществляются коллаборативным роботом-манипулятором. Оператор лишь восстанавливает работоспособность оборудования при возникновении сбоев, что одновременно является безопасным для человека и позволяет не нарушать производственный цикл роботизированной ячейки. При этом, за счет применения коллаборативного робота манипулятора обеспечивается возможность совместного режима работы совместно с оператором, например, при необходимости ручного обслуживания ССМ или выполнении функций пересчета денежной наличности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0024] Признаки и преимущества настоящего технического решения станут очевидными из приводимого ниже подробного описания и прилагаемых чертежей, на которых:
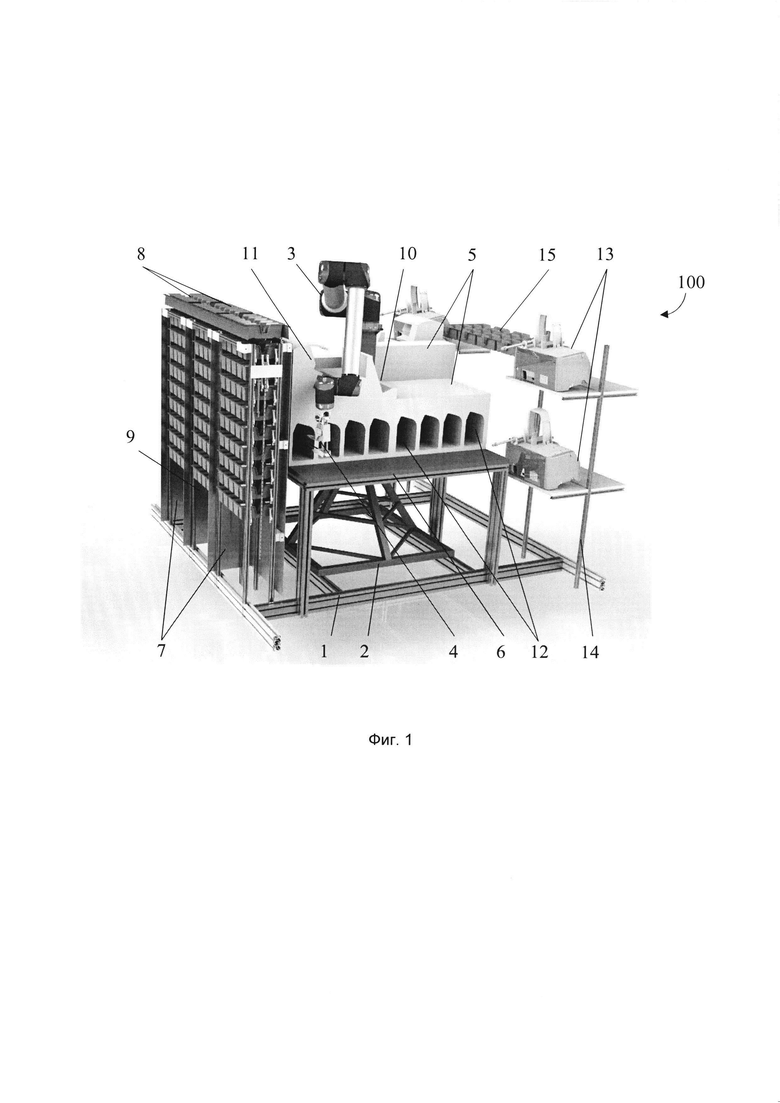
[0025] На Фиг. 1 изображен общий вид коллаборативного роботизированного участка денежной наличности.
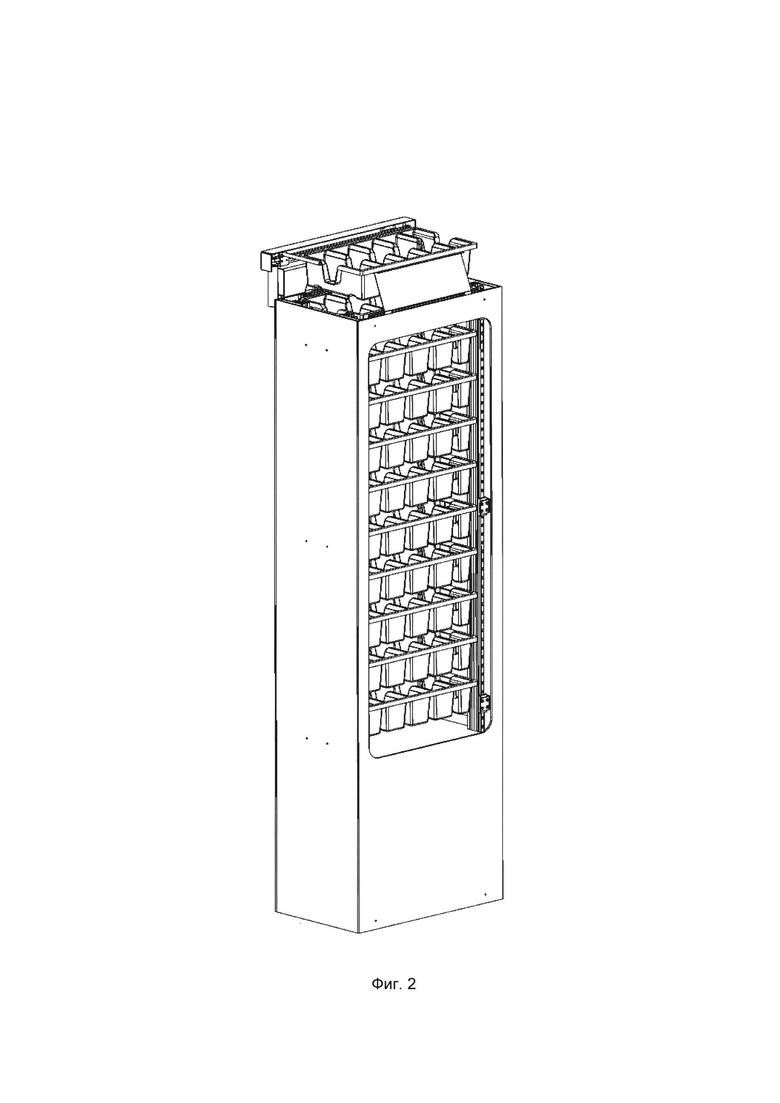
[0026] На Фиг. 2 изображен накопитель подачи паллет с денежной наличностью.
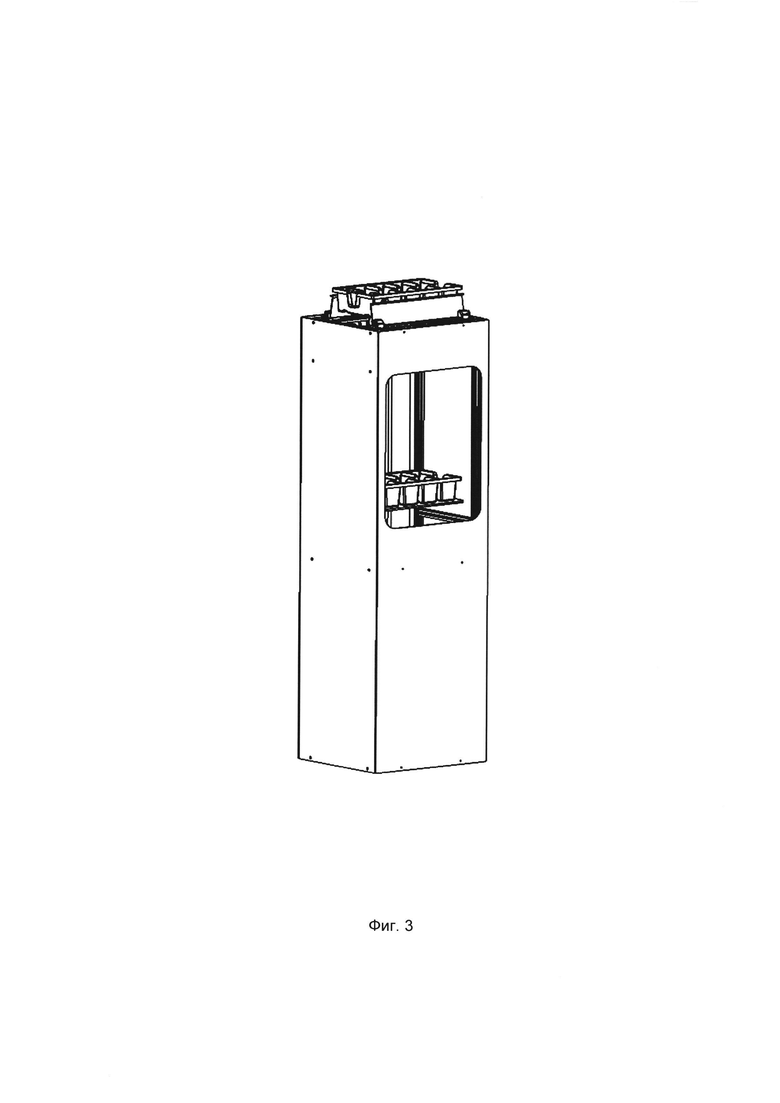
[0027] На Фиг. 3 изображен накопитель сброса пустых паллет.
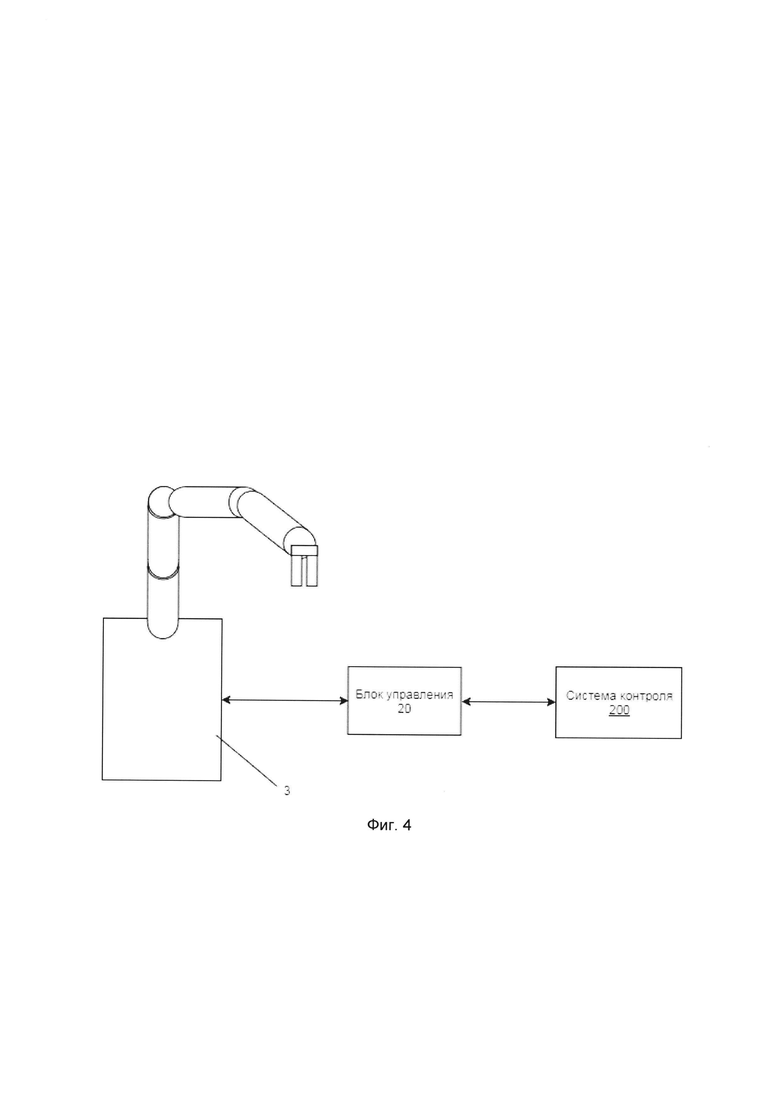
[0028] На Фиг. 4 представлен пример взаимодействия с системой контроля РУП.
ПОДРОБНОЕ ОПИСАНИЕ
[0029] Ниже будут описаны термины и понятия, необходимые для понимания и реализации настоящего технического решения.
[0030] Оператор - лицо, прошедшее специальную подготовку по роботизированным системам и безопасной их эксплуатации коллаборативного роботизированного участка пересчета (РУП).
[0031] Промышленный робот - автоматическая машина, состоящая из манипулятора и устройства программного управления его движением, предназначенная для замены человека при выполнении основных и вспомогательных операций в производственных процессах.
[0032] Манипулятор - совокупность пространственного рычажного механизма и системы приводов, осуществляющая под управлением программируемого автоматического устройства или человека-оператора действия (манипуляции), аналогичные действиям руки человека.
[0033] Коллаборативный робот-манипулятор (сокр. кобот) - это робот-манипулятор, предназначенный для прямого взаимодействия с человеком в рамках определенного совместного пространства. Совместное пространство -защищенное рабочее пространство, в котором робот и человек могут одновременно выполнять задания во время производственной операции (см. ISO/TS 15066: 2016).
[0034] Счетно-сортировальная машина (ССМ) - устройство сортировки банкнот, предназначенное для обработки денежной наличности по номиналу, ориентации, ветхости, подлинности и платежеспособности. В настоящее время широко используются счетно-сортировальные машины таких фирм как Giesecke & Devrient (например, модель BPS С4 12p-1R), Glory (например, модель UW-F12), Laurel (например, модель Laurel K4), Toshiba (например, модель Toshiba IBS 1000). Счетно-сортировальная машина состоит из одного загрузочного кармана, одного или двух карманов отбраковки, а также четырех сортировочных карманов. Каждые модели из представленных фирм имеют возможность увеличения числа сортировочных карманов еще на четыре и, таким образом, довести их общее количество до шестнадцати. Данные компоновки реализуются для одновременного выполнения разнообразных сортировочных задач, когда все имеющиеся банкноты должны быть рассортированы по номиналу, ветхости, ориентации лицевой стороны/изображения и подлинности.
[0035] Загрузочный карман - карман счетно-сортировальной машины для загрузки пачки купюр.
[0036] Сортировочный карман - карман-накопитель счетно-сортировальной машины для отсортированных купюр.
[0037] Карман отбраковки - карман для купюр, не прошедшие сортировку на счетно-сортировальной машине.
[0038] Ленточный упаковщик банкнот, или обандероливатель, или обандероливающая машина - устройство, предназначенное для автоматического обандероливания корешков банкнот одной кольцевой поперечной специальной термоклейкой лентой на бумажной/пластиковой основе с последующим ее термосвариванием.
[0039] Корешок - сформированная по 100 банкнот одного номинала денежная наличность.
[0040] Паллета - специально разработанный лоток для пересчета денежной наличности, разделенный перегородками на несколько секций, в которые непосредственно загружается денежная наличность.
[0041] Карман паллеты - один из отсеков паллеты, куда выполняется загрузка денежной наличности.
[0042] Паллета возврата - лоток, предназначенный для приема купюр, не прошедшие сортировку на счетно-сортировальной машине.
[0043] Пневмоцилиндр (полн. пневматический цилиндр) - устройство, преобразующее энергию потока сжатого воздуха (или газа) в энергию поступательного движения поршня.
[0044] Накопитель подачи паллет - вертикальный электропневматический конвейер для подачи паллет с денежной наличностью.
[0045] Накопитель сброса паллет - вертикальный гравитационный электропневматический конвейер для приема пустых паллет, прошедшие разгрузку коллаборативным роботом-манипулятором с захватом на роботизированном участке пересчета.
[0046] Модуль - элемент системы, представляющий собой основное (ССМ, коллаборативный робот-манипулятор) или вспомогательное (накопители подачи и сброса, упаковщики) оборудование.
[0047] Коллаборативный РУП 100 представляет собой пространственную конструкцию в виде платформы 1, как показано на Фиг. 1, на которой по центру располагается по меньшей мере один роботизированный манипулятор 3. Манипулятор 3 может располагаться на стойке-основании 2, на подвесе или балке (не показаны). Манипулятор 3 обеспечивает перемещение денежных средств между элементами участка в по меньшей мере шести степенях свободы. В качестве робота-манипулятора 3 могут применяться различные существующие виды данного типа устройств, например, Universal Robots UR10, KUKA LBR IIWA 7 R800, Fanuc CR-7iA/L и др., не ограничиваясь.
[0048] Стойка-основание 2 крепится к платформе, например, с помощью болтового соединения. Робот-манипулятор 3 может фиксироваться на стойке-основании 2 с помощью болтового или иного типа жесткого соединения сборочными операциями. На фланце робота-манипулятора 3 установлен захват, предназначенный для захватывания и перемещения пачек денежных банкнот в любом направлении и под любым углом между модулями роботизированного комплекса. Стойка-основание 2 для манипулятора обеспечивает взаимодействие робота-манипулятора 3 и всех модулей РУП 100.
[0049] Конструкция стойки-основания 2 способна выдержать момент не менее чем в десять раз превышающий максимальный крутящий момент основания манипулятора 3 и вес не менее чем в пять раз превышающий вес робота-манипулятора 3, что обусловлено прочностными и нагрузочными характеристиками, возникающими при перемещении манипулятора 3.
[0050] Коллаборативный РУП 100 снабжается одной или несколькими ССМ 5. ССМ 5 имеет один приемный карман 10 и один или два кармана отбраковки 11, четыре или восемь или двенадцать или шестнадцать сортировочных кармана 12.
[0051] На Фиг. 1 представлен пример реализации с двумя ССМ 5, которые располагаются в пределах рабочей зоны коллаборативного робота-манипулятора 3. Под рабочей зоной понимается расстояние от крайней точки захвата 4 до основания манипулятора, причем организация рабочей зоны в настоящем решении обеспечивает минимальное перемещение между элементами участка, и элементы участка расположены таким образом, чтобы обеспечивать доступ к ним персонала без прекращения работы коллаборативного робота-манипулятора.
[0052] ССМ 5 размещается на поддерживающем элементе 6, например, столе или кронштейне. Элемент 6 жестко связан с платформой 1, например, с помощью винтов. ССМ 5 устанавливается на элементе 6 без каких-либо фиксирующих узлов, поскольку ССМ 5 имеет достаточный вес для стационарного расположения. При снабжении РУП 100 двумя или более ССМ 5, они располагаются тыльными частями друг к другу. Такое решение обеспечивает свободный доступ обслуживающего персонала ко всем элементам ССМ 5, например, при восстановлении работоспособности в случае сбойных ситуаций на ССМ 5 или при совместном режиме работы, когда оператор вручную взаимодействует с ССМ 5.
[0053] РУП 100 снабжен одним или более накопителями подачи 7 паллет 8, каждый из которых жестко крепится к платформе 1, в которые вручную загружаются паллеты 8 с денежной наличностью. Рядом с накопителем 7 к платформе крепится накопитель сброса 9 для приема пустых паллет.
[0054] В случае использования двух накопителей 7, накопитель сброса 9 крепится к платформе 1 между ними. Такая конструкция обусловлена необходимостью высвобождения зоны разгрузки двух накопителей 7, где манипулятор осуществляет выемку денежной наличности из карманов паллет первого и второго накопителей 7, чтобы обеспечить подачу новых паллеты 8 с денежной наличностью для последующей разгрузки манипулятором 3.
[0055] На Фиг. 2 представлен пример реализации накопителя подачи 7 паллет, например, вместимостью десять паллет, который выполнен в виде вертикального конвейера, с жестко закрепленными внизу каркаса пневмоцилиндрами. Пневмоцилиндры могут быть, например, с ходом 120 мм, соединенные через специальные пластины с линейными направляющими, которые перемещаются вдоль кареток, жестко связанных с каркасом. При перемещении направляющих с закрепленными на них лапками, на которых расположены паллеты 8 с денежной наличностью, происходит подача паллеты в зону разгрузки коллаборативным роботом-манипулятором 3.
[0056] Для перемещения пустых паллет из зоны разгрузки в накопитель сброса 9 используется шаговый двигатель, жестко закрепленный на верхней части каркаса накопителя подачи 7. Шаговый двигатель через зубчатый ремень, проходящий, например, через два шкива, приводит в движение каретку вдоль рельсовых линейных направляющих. На каретке установлен жесткий рычаг сброса, выполненный, например, из карбона, алюминия, стали и т.д., не ограничиваясь, который служит для передачи движения пустой паллете.
[0057] Накопитель сброса 9 пустых паллет, например, вместимостью двадцать паллет, представляет собой вертикальный конвейер, как показано на Фиг. 3. На верхней части каркаса накопителя сброса 9 установлены два пневмоцилиндра, которые связаны с держателями для паллеты, имеющими форму пластины. Каждый из пневмоцилиндров способствует повороту держателя паллеты на определенный угол, например, на 20 градусов, и синхронная работа данных пневмоцилиндров образует два положения держателей - открытое и закрытое. Закрытое положение предназначено для приема и фиксации пустой паллеты от накопителя подачи. Открытое положение держателей паллеты приводит к сбросу пустой паллеты под действием силы тяжести внутрь накопителя сброса на подвижное основание, которое обеспечивает постоянную высоту сброса в зависимости от количества накапливаемых паллет. Подвижное основание приводится в движение за счет винта, например, трапецеидального, который через муфту связан с валом шагового двигателя.
[0058] РУП 100 также содержит два или более ленточных упаковщика купюр 13, выполненных с возможностью обандероливания корешков пачек купюр. Упаковщики 13 оснащены системой выталкивания упакованных корешков, и предназначены для автоматического обандероливания корешков банкнот с последующим их выталкиванием. Упаковщики 13 расположены тыльными частями к ССМ 5 на поддерживающих элементах, например, полках или кронштейнах, которые крепятся к боковым стойкам 14 под наклоном с углом, например, 10 градусов. Такое решение по размещению стоек 14 с упаковщиками 13 обеспечивает свободный доступ обслуживающего персонала к упаковщикам 13, например, в случае устранения замятия ленты или замене расходных материалов.
[0059] Стойки 14 представляют собой вертикальные конструкции, каждая из которых жестко крепится к платформе 1 с боковой стороны ССМ 5 в одной плоскости по направлению движения робота-манипулятора 3 с захватом 4 относительно сортировочных карманов 12. Благодаря данному расположению обеспечивается минимальная длина траектории движения робота-манипулятора 3 при его перемещении от сортировочных карманов 12 до ленточных упаковщиков 13. Угловое расположение упаковщика 13 относительно полки предназначено для выравнивания загруженного в него манипулятором 3 корешка банкнот для обандероливания в продольном направлении, которое достигается за счет скольжения купюр.
[0060] Количество обандероливающих упаковщиков 13 может варьироваться от двух до четырех устройств. Для обеспечения достаточной производительности ячейки рекомендовано использовать минимум два упаковщика 13, по одному на каждой стойке 14. Наличие дополнительных упаковщиков 13, например по два на каждой стойке 14, обеспечивает резерв на случай выхода из строя одного или одновременно двух упаковщиков 13, которые непосредственно задействованы в работе РУП 100.
[0061] Система выталкивания упаковщика 13 представляет собой пневмоцилиндр, жестко закрепленный на корпусе обандероливающей машины, под действием которого через установленный с ним специальный столик происходит выталкивание упакованного корешка банкнот.
[0062] Также между двумя стойками 14 закреплена специальная площадка с паллетами возврата 15. Данное расположение обеспечивает минимальное по длине траекторию перемещения коллаборативного робота-манипулятора 3 с захватом 4 вместе с отбракованными купюрами от кармана возврата 11 до паллет возврата 15.
[0063] Коллаборативный роботизированный участок пересчета денежной наличности 100 работает следующим образом. Паллеты 8 с неотсортированными банкнотами подаются одним или несколькими накопителями подачи 7 в зону разгрузки коллаборативным роботом-манипулятором 3. Далее захват 4 коллаборативного робота-манипулятора 3 осуществляет разгрузку стопки банкнот из карманов паллет и передает их в приемный карман 10 ССМ 5, которая в соответствии с установленным режимом обработки осуществляет подсчет и сортировку банкнот в соответствующие сортировочные карманы 12. После этого манипулятор 3 осуществляет разгрузку полных сортировочных карманов 12 в упаковщики 13, которые, в свою очередь, обандероливают корешки банкнот и при помощи системы выталкивания отправляют упакованные корешки банкнот в контейнер для готовой продукции (не показаны). Отбракованные купюры, которые ССМ 5 формирует в карманах отбраковки 11, манипулятор 3 переносит в паллеты возврата 15. Пустая паллета, которая освободился от денежной наличности в процессе разгрузки, отправляется в накопитель сброса 9.
[0064] Основная особенность такой конструкции РУП 100 обеспечивает компактное расположение оборудования, что позволяет добиться оптимальных по времени и расстоянию траекторий движения коллаборативного робота-манипулятора 3 между модулями участка.
[0065] Коллаборативный робот-манипулятор 3 содержит также блок управления 20, который связан с системой контроля работоспособности РУП 200, как это представлено на Фиг. 4. Блок управления 20 представляет собой вычислительный модуль, обеспечивающий программную обработку необходимых алгоритмических команд. Блок 20 может представлять собой ПЛИС-схему, микрокомпьютер, стационарный компьютер, сервер и т.п. Система содержит основные компоненты, такие как: один или несколько процессоров (микроконтроллеров), память, интерфейсы ввода/вывода, средства ввода/вывода и устройство для сетевого обмена данными.
[0066] При выходе из строя или фиксации нарушения рабочего процесса по меньшей мере одного элемента РУП 100, система контроля 200 формирует и передает сигнал в блок управления 20 коллаборативного робота-манипулятора 3. При получении информации о выходе из строя одного или нескольких элементов РУП 100 блок управления 20 формирует команду на изменение режима работы коллаборативного робота-манипулятора 3. Например, такой командой может быть исключения из зоны работы манипулятора 3 устройства, вышедшего из строя, изменение режимы скорости работы и т.п.
[0067] Представленное раскрытие осуществления технического решения в настоявших материалах заявки является предпочтительным описанием его реализации и не должно трактоваться как ограничивающее иные, частные примеры его реализации, не выходящие за рамки описания представленных материалов, которые являются очевидными для специалиста соответствующей области техники.
Изобретение относится к автоматизации процесса пересчета, сортировки и упаковки денежной наличности в кассово-инкассаторских центрах. Роботизированный участок пересчета для выполнения счетно-сортировальных операций денежных средств содержит пространственную конструкцию в виде платформы, на которой по центру размещен коллаборативный робот-манипулятор с рабочим органом в виде захвата, имеющий по меньшей мере шесть степеней свободы и обеспечивающий перемещение денежных средств между элементами участка. На платформе также расположены по меньшей мере одна счетно-сортировочная машина, по меньшей мере один накопитель подачи паллет с денежной наличностью, по меньшей мере один накопитель сброса пустых паллет и по меньшей мере два упаковщика купюр, выполненных с возможностью обандероливания корешков пачек купюр. Элементы участка компактно расположены в пределах рабочей зоны робота-манипулятора с обеспечением минимального перемещения между ними и с обеспечением доступа к ним персонала без прекращения работы коллаборативного робота-манипулятора. Техническим результатом является обеспечение непрерывности процессов пересчета, сортировки и упаковки денежной наличности, легкодоступности обслуживающего персонала к модулям системы при отсутствии необходимости остановки работы. 14 з.п. ф-лы, 4 ил.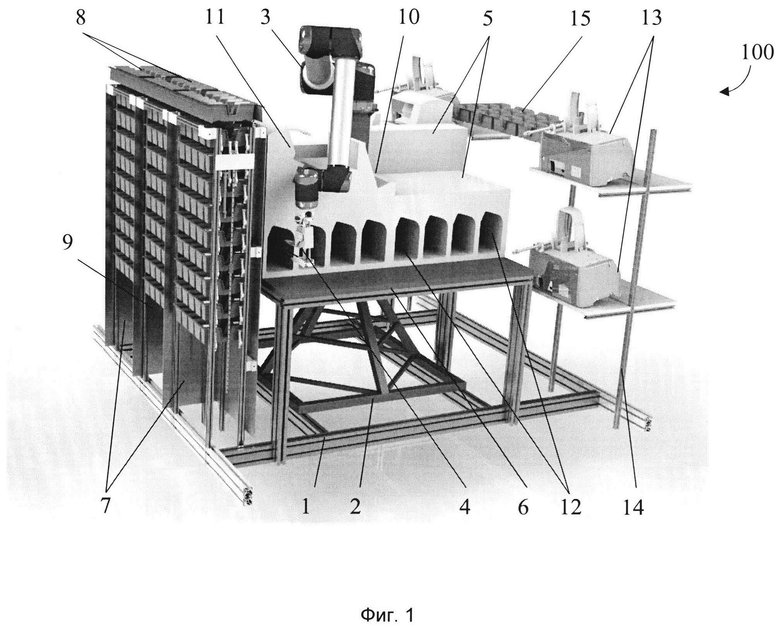
1. Роботизированный участок пересчета (РУП) для выполнения счетно-сортировальных операций денежных средств, содержащий
пространственную конструкцию в виде платформы, на которой по центру размещен по меньшей мере один коллаборативный робот-манипулятор с рабочим органом в виде захвата, имеющий по меньшей мере шесть степеней свободы и обеспечивающий перемещение денежных средств между элементами участка, при этом на платформе также расположены
- по меньшей мере одна счетно-сортировочная машина (ССМ),
- по меньшей мере один накопитель подачи паллет с денежной наличностью,
- по меньшей мере один накопитель сброса пустых паллет и
- по меньшей мере два упаковщика купюр, выполненных с возможностью обандероливания корешков пачек купюр,
причем элементы РУП компактно расположены в пределах рабочей зоны коллаборативного робота-манипулятора с обеспечением минимального перемещения между ними, и элементы участка расположены таким образом, чтобы обеспечивать доступ к ним персонала без прекращения работы коллаборативного робота-манипулятора.
2. Роботизированный участок по п. 1, характеризующийся тем, что ССМ содержит один приемный карман, по меньшей мере один карман отбраковки и по меньшей мере четыре сортировочных кармана.
3. Роботизированный участок по п. 1, характеризующийся тем, что коллаборативный робот-манипулятор установлен на стойке основании.
4. Роботизированный участок по п. 1, характеризующийся тем, что платформа содержит боковые стойки.
5. Роботизированный участок по п. 4, характеризующийся тем, что коллаборативный робот-манипулятор расположен на боковых стойках в вертикальной части.
6. Роботизированный участок по п. 5, характеризующийся тем, что коллаборативный робот-манипулятор закреплен на балке или подвесе.
7. Роботизированный участок по п. 1, характеризующийся тем, что ССМ установлена на поддерживающем элементе, соединенном с платформой.
8. Роботизированный участок по п. 7, характеризующийся тем, что поддерживающий элемент представляет собой подставку, стол или кронштейн.
9. Роботизированный участок по п. 1, характеризующийся тем, что накопитель подачи паллет с денежной наличностью и накопитель сброса пустых паллет закреплены к платформе.
10. Роботизированный участок по п. 4, характеризующийся тем, что каждый из упаковщиков установлен на поддерживающем элементе, соединенном с боковой стойкой.
11. Роботизированный участок по п. 10, характеризующийся тем, что поддерживающий элемент представляет собой подставку или кронштейн.
12. Роботизированный участок по п. 1, характеризующийся тем, что коллаборативный робот-манипулятор содержит блок управления.
13. Роботизированный участок по п. 12, характеризующийся тем, что дополнительно содержит систему контроля работоспособности элементов участка, связанную с блоком управления.
14. Роботизированный участок по п. 13, характеризующийся тем, что при выходе из строя или фиксации нарушения рабочего процесса по меньшей мере одного элемента участка система контроля передает сигнал в блок управления коллаборативного робота-манипулятора.
15. Роботизированный участок по п. 14, характеризующийся тем, что блок управления формирует команду на изменение режима работы коллаборативного робота-манипулятора.
| Роботизированный счетно-сортировальный комплекс | 2016 |
|
RU2622485C1 |
| Роботизированный счетно-сортировальный комплекс | 2016 |
|
RU2639606C1 |
| УСТРОЙСТВО для ИЗГОТОВЛЕНИЯ охотничьих ПЫЖЕЙ из ШЕРСТЯНОЙ МАССЫ | 0 |
|
SU170339A1 |
| US 5250788 A1, 05.10.1993 | |||
| US 5105069 A1, 14.04.1992 | |||
| FR 2924845 A1, 12.06.2009. | |||

