Область техники, к которой относится изобретение.
Изобретение относится к высокоскоростным транспортным системам, предназначенным для перевозки пассажиров и (или) грузов.
Уровень техники.
Из уровня техники известно техническое решение по патенту на полезную модель №129913, ФГБОУВПО «Ярославский государственный технический университет», B65G 51/00, опубл. 10.07.2013 г., в котором представлено описание пневмотранспортной магнитной системы, состоящей из транспортного средства, пневмотрубопровода из немагнитного материала, поршня, помещенного в пневмотрубопровод и имеющего внутри' себя постоянные магниты, которые взаимодействуют с постоянными магнитами, расположенными на транспортном средстве, состоящего из двух или более модулей, связанных гибкой механической связью между собой, на которых установлены ролики. Общими признаками, совпадающими с существенными признаками заявляемого изобретения, являются: транспортная система, транспортное средство, ролики.
Техническая проблема, которая не могла быть решена при использовании вышеописанного аналога изобретения, заключается в ограничении выбора материалов для изготовления пневмотрубопровода. Для создания эффективной работы пневмотранспортной системы требуются высокопрочные, немагнитные, дорогостоящие материалы, применение которых значительно увеличивает стоимость изготовления пневмотранспортной системы в целом. Из уровня техники также известно техническое решение по патенту на изобретение №2549317, Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Петербургский государственный университет путей сообщения Императора Александра I", B60G 13/10, B60G 13/08, B60V 3/04, опубл. 27.04.2015 г., в котором представлено описание транспортной системы на электродинамическом подвесе, содержащей путевую структуру, в опорах которой расположены рядами симметрично относительно продольной ее оси вертикально ориентированные статорные обмотки линейного синхронного двигателя и горизонтально ориентированные короткозамкнутые катушки подвеса, смещенные в сторону продольной оси путевой структуры с заходом под статорные обмотки, экипаж, в верхней части которого жестко закреплен продольный гребень, внутри которого установлены вертикально сверхпроводящие соленоиды, и который размещен между статорными обмотками, путевая структура расположена над экипажем, на наружных боковых поверхностях гребня симметрично относительно продольной оси путевой структуры жестко закреплены аэродинамические пластины, снизу от последних на опорах путевой структуры жестко закреплены опорные пластины, параллельные аэродинамическим пластинам. Общими признаками, совпадающими с существенными признаками заявляемого изобретения, являются: транспортная система, путевая структура, экипаж, электродвигатель.
Техническая проблема, которая не могла быть решена при использовании вышеописанного аналога изобретения, заключаются в сложности изготовления транспортной системы, высокой стоимости электродинамического подвеса и электродвигателя, ведущая к повышению общей стоимости изготовления транспортной системы. Кроме того, вышеописанная транспортная система может быть использована только, как наземный вид транспорта. Наиболее близким к заявляемому техническому решению является техническое решение по патенту на изобретение DE 4014700, BOSCH GMBH ROBERT, B23Q 7/14, B61L 23/00, опубл. 14.11.1991 г., в котором представлено описание транспортного устройства с не менее одним независимым устройством для зажима заготовки в форме тележки/каретки или т.п., с собственным электрическим приводом и его управлением, с разветвленной путевой структурой с расположенными на ней станциями, в частности станцией погрузки, контроля и/или обработки, при этом тележки/каретки снабжены устройством управления, включающим датчики и коммутационные средства для регистрации параметров движения и внешних сигналов, а также устройство обработки сигналов, поступающих от коммутационных средств и датчиков, которое на основании анализа сигналов ускоряет, замедляет и/или приводит в действие тележку/каретку для достижения минимально возможного времени транспортировки/для оптимизации времени транспортировки. Общими признаками, совпадающими с существенными признаками заявляемого изобретения, являются: транспортное устройство, заготовки в форме тележки/каретки или т.п. в количестве одной и более, электрический привод, разветвленная путевая структура с расположенными на ней станциями погрузки, устройство управления, датчики.
Техническая проблема, которая не могла быть решена при осуществлении вышеописанного аналога изобретения, заключается в сложности и, соответственно, высокой стоимости изготовления транспортного устройства, объясняющаяся необходимостью использования большого количества точного и дорогостоящего оборудования, наличием большой вероятности отказа в работе всей транспортной системы при отказе в работе оборудования, находящегося в отдельно взятой ее части, в частности, оборудования, размещенного на отдельно взятой тележке/каретке.
Раскрытие сущности изобретения.
Техническим результатом, на достижение которого направлено изобретение, является создание эффективного, универсального, высокоскоростного, экологически чистого и безопасного транспорта для перевозки пассажиров и (или) грузов в пределах города, между городами, на промышленных предприятиях, в труднопроходимой местности.
Технический результат достигается за счет выполнения электрической транспортной системы, включающей вагоны в количестве одного и более, разветвленную путевую структуру со станциями посадки (погрузки), расположенными на ней, устройство управления, электрический двигатель, датчики; устройство управления и датчики являются частью управляющей системы, осуществляющей общее управление движением вагонов и расположенной дистанционно относительно путевой структуры и вагонов, дополнительно содержащей преобразователи частоты, обеспечивающие движение вагонов за счет преобразования угловой скорости в линейную скорость и регулирующие линейную скорость; вдоль осевых линий шпал, уложенных на основании путевой структуры, расположены пассивные ролики и активные ролики, взаимодействующие во время движения вагонов с электрическими двигателями, преобразователями частоты и датчиками, выполненными в виде датчиков тока, осуществляющих включение и выключение электрических двигателей.
Линейная скорость движения вагонов находится в зависимости от скорости вращения осей активных роликов и их диаметра..
Максимальный расход электрической энергии, вырабатываемой электрическими двигателями, происходит в момент прохождения вагонов через активные ролики.
Минимальный интервал между следующими друг за другом вагонами составляет 30 сек.
Вагоны изготавливаются из легких материалов.
Эффективность работы предлагаемой электрической транспортной системы достигается высокой производительностью, обеспечиваемой возможностью достижения максимально высокой скорости движения вагонов, влияющей на уменьшение интервала движения и соответственно увеличение пассажиропотока (грузопотока), наличием общей системы управления движением всех вагонов одновременно, рациональным использованием энергоресурсов. Достижение максимально высокой скорости обеспечивается применением преобразователей частоты, преобразующих угловую скорость движения вагонов в линейную скорость; возможностью регулирования преобразователями частоты линейной скорости движения вагонов в зависимости от скорости вращения осей активных роликов и их диаметра; конструктивными особенностями вагонов (радиальный выступ на пассивном ролике и выемка у вагона), как признаками, создающими осевую устойчивость движения вагонов независимо от значения заданной скорости; возможностью применения легких материалов, из которых изготавливаются вагоны, что облегчает их вес. Наличие общей системы управления движением всех вагонов одновременно позволяет исключить установку дорогостоящего оборудования управления на каждом отдельно взятом вагоне.
Рациональное использование энергоресурсов обеспечивается максимальным расходом электрической энергии, вырабатываемой электрическими двигателями, лишь в момент прохождения вагонов через активные ролики.
Универсальность предлагаемой электрической транспортной системы обеспечивается возможностью перевозки, как пассажиров, так и грузов; возможностью применения его в различных вариантах исполнения транспортной системы: наземный, эстакадный, подземный.
Экологичность предлагаемой электрической транспортной системы обеспечивается применением в нем электрооборудования.
Высокая безопасность предлагаемой электрической транспортной системы для пассажиров обеспечивается отсутствием электрооборудования в конструкции отдельно взятого вагона, где перевозятся пассажиры; возможностью предотвращения возникновения опасной ситуации путем останова работы одновременно всех единиц оборудования.
Краткое описание чертежей.
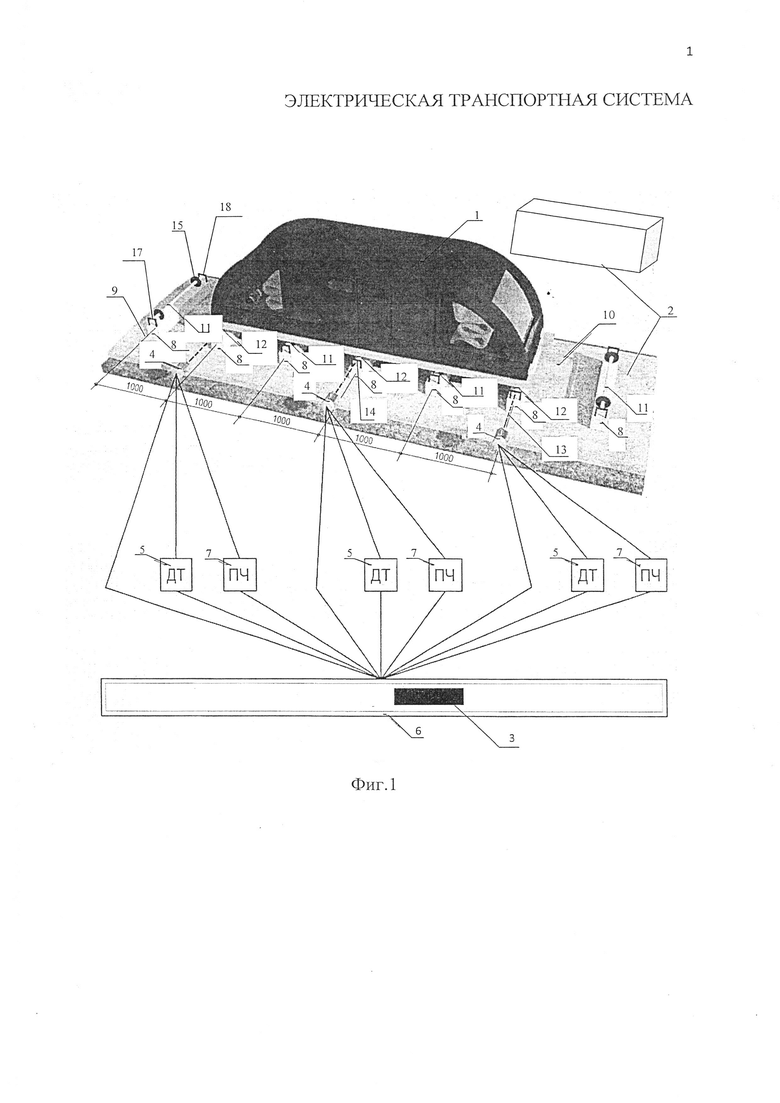
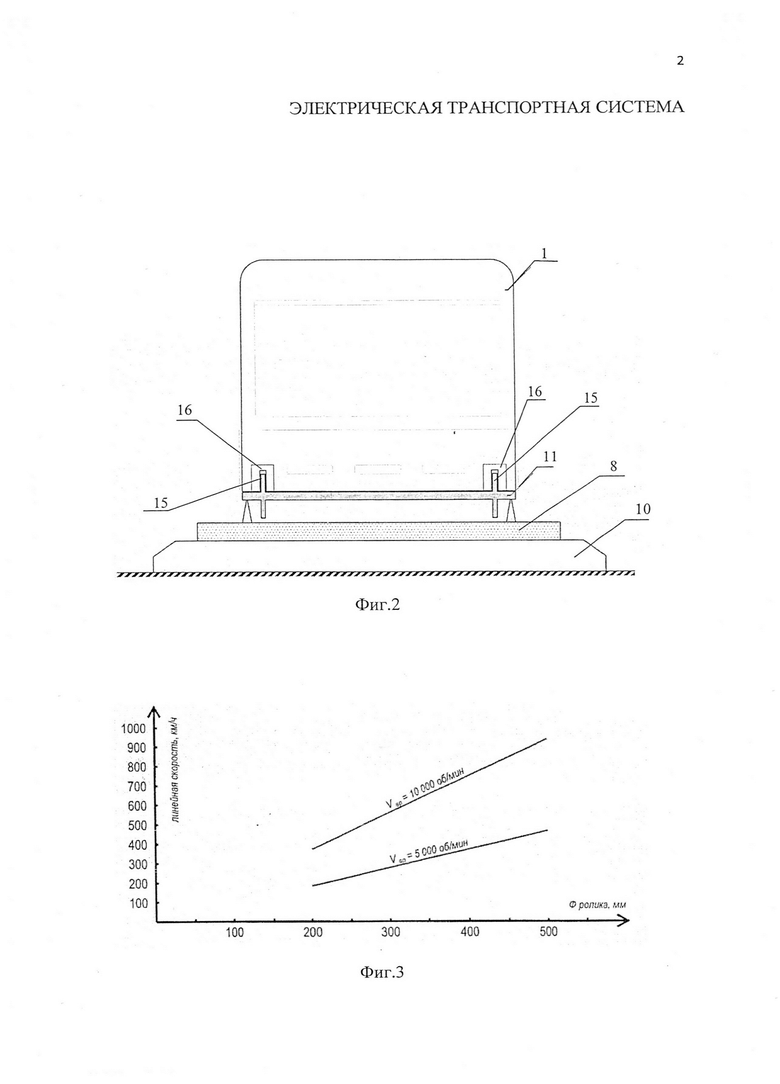
Изобретение поясняется чертежами, где на фиг. 1 представлен общий вид электрической транспортной системы (эскиз), на фиг. 2 представлен общий вид вагона (вид сзади), на фиг. 3 представлен график зависимости линейной скорости движения вагонов от диаметра активного ролика.
Позициями на чертежах обозначены:
1 - вагоны,
2 - путевая структура со станциями посадки (погрузки),
3 - устройство управления,
4 - электрические двигатели,
5 - датчики тока,
6 - управляющая система,
7 - преобразователи частоты,
8 - шпалы,
9 - осевые линии шпал,
10 - основание путевой структуры,
11 - пассивные ролики,
12 - активные ролики,
13 - ось электрического двигателя,
14 - ось активного ролика,
15 - радиальный выступ,
16 - выемка у вагона,
17 - узел крепления пассивных и активных роликов,
18 - подшипники.
Осуществление изобретения.
Электрическая транспортная система включает вагоны 1, разветвленную путевую структуру со станциями посадки (погрузки) 2, расположенными на ней, устройство управления 3, электрические двигатели 4, датчики тока 5, являющиеся частью управляющей системы 6, осуществляющей общее управление движением вагонов 1 и расположенной дистанционно относительно путевой структуры 2 и вагонов 1.
Управляющая система 6 также включает преобразователи частоты 7, обеспечивающие движение вагонов 1 за счет преобразования угловой скорости вращения оси активных роликов 12 в линейную скорость.
На основании путевой структуры 10 расположены шпалы 8. Вдоль осевых линий шпал 9 в порядке чередования установлены пассивные ролики 11 и активные ролики 12. Шпалы 8 располагаются друг относительно друга на расстоянии, необходимом и достаточным для того, чтобы активный ролик 12, остающийся позади двигающегося вагона 1 выключался посредством датчика тока 5, а активный ролик 12, находящийся впереди вагона, одновременно при этом включался.
На боковой стороне основания путевой структуры 10 размещаются электрические двигатели 4, включение и выключение которых обеспечивается датчиками тока 7, расположенными в управляющей системе 6. Количество электрических двигателей 4, равное количеству датчиков тока 5 и количеству преобразователей частоты 7 определяется количеством активных роликов 12, требующихся для оборудования ими путевой структуры, что, в конечном итоге, определяется протяженностью путевой структуры 2.
Электрические двигатели 4 связаны с активными роликами 12 механической связью, при этом, каждый отдельно установленный электрический двигатель механически связан с соответствующим ему отдельно установленным активным роликом 12. Преобразователи частоты 7, датчики тока 5 и активные ролики 12 связаны между собой электрической связью, а, именно, каждый отдельно установленный преобразователь частоты 7 электрически связан с соответствующим ему датчиком тока 5, осуществляющим включение и выключение соответствующего ему электрического двигателя 4. Преобразователи частоты 7, управляющие скоростью вращения оси электрического двигателя 13 с помощью управляющей системы 6, осуществляют регулирование линейной скорости движения вагонов 1, зависящей от скорости вращения оси активного ролика 15 и его диаметра.
Пассивные ролики 11 и активные ролики 12 выполнены в виде полых цилиндров определенной длины и диаметра. Отличительной особенностью конструкции пассивных роликов 11 являются предусмотренные в них для устойчивости вагонов 1 радиальные выступы 15, расположенные на обоих концах каждого из пассивных роликов 11. Радиальный выступ 15, имеющий размер и форму, совпадающий с размером и формой выемки 16, находящейся в нижней части корпуса вагона 1, входя в нее, обеспечивает при этом осевую устойчивость движения вагонов 1.
Пассивные ролики 11 и активные ролики 12 смонтированы на шпалах 8 посредством узла крепления пассивных и активных роликов 17, содержащего подшипники 18.
Для уменьшения коэффициента силы трения, практически исключая ее, в узле крепления пассивных и активных роликов 17 возможно применение магнитного подвеса.
Необходимое количество вагонов в электрической транспортной системе определяется требуемой производительностью и протяженностью путевой структуры, к каждому отдельно двигающемуся вагону при необходимости могут быть прицеплены дополнительные вагоны, вместе с которыми он образует состав вагонов.
Устройство управления 3 может быть выполнено в виде компьютерной системы или контроллера.
Электрическая транспортная система работает следующим образом.
Для организации работы электрической транспортной системы, содержащей разветвленную путевую структуру со станциями посадки (погрузки) 2, необходимо обеспечить поступательное движение вагонов 1 посредством запуска электрических двигателей 4 с равномерным ускорением.
Движение вагонов 1 происходит при прохождении их через пассивные ролики 11 и активные ролики 12, смонтированные в порядке их чередования на шпалах 8 вдоль их осевых линий 9 с помощью узла крепления пассивных и активных роликов 17, содержащего подшипники 18.
Движение вагона 1 осуществляется таким образом, чтобы активный ролик 12, остающийся позади двигающегося вагона 1 выключался посредством датчика тока 5, а активный ролик 12, находящийся впереди вагона, одновременно включался при этом.
При движении каждого последующего вагона происходит аналогичная последовательность включений и выключений активных роликов. Таким образом, вагоны находятся в равномерном движении, с минимальным интервалом между следующими друг за другом вагонами, равным 30 сек.
Управляющая система 6 автоматически, с помощью устройства управления 3 осуществляет воздействие на электрические двигатели 4, которые приводят в механическое движение активные ролики 12. Включение и выключение электрических двигателей 4 обеспечивается датчиками тока 5.
Преобразователи частоты 7 посредством управления скоростью вращения оси электрического двигателя 13 с помощью устройства управления 3, находящегося в управляющей системе 6, обеспечивают за счет преобразования угловой скорости в линейную скорость движение вагонов 1 и управление линейной скоростью движения вагонов 1, регулируя ее при этом.
Стабилизация движения вагонов 1 обеспечивается наличием радиального выступа 15 на пассивных роликах 11, входящего в выемку вагона 16, расположенную в нижней части корпуса вагона 1.
Линейная скорость движения вагонов 1 зависит от двух параметров активного ролика: скорости вращения оси активного ролика 14 и его диаметра.
В таблице и на графике (фиг. 3) показана прямая зависимость линейной скорости движения вагонов от диаметра активного ролика, т.е. с увеличением или уменьшением диаметра активного ролика увеличивается или уменьшается линейная скорость движения вагонов.
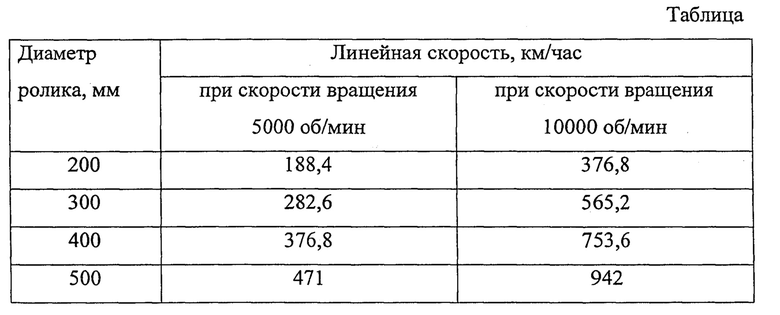
Пример расчета (пояснение к таблице):
Vвр скорость вращения = 5000 об/мин,
dp диаметр ролика = 300 мм = 0,3 м.
Линейная скорость равна Vвр × π dp = 5000×(3,14×0,3)×60 = 282,6 км/час. При регулировании скорости вращения осей активных роликов 14 и их диаметра максимально достигнутая скорость равна 1200 км/ч. Минимальный интервал между следующими друг за другом вагонами при этом составляет 30 сек.
Преимущества заявляемого изобретения:
- экономичность, достигаемая простотой конструкции, применением общей (единой) системы управления движением всех вагонов одновременно, позволяющей исключить установку дорогостоящего оборудования управления на каждом отдельно взятом вагоне; работой устройства в режиме, когда максимальный расход электрической энергии, вырабатываемой электрическими двигателями, происходит лишь в момент прохождения вагонов через активные ролики,
- высокая производительность, обеспечиваемая высокой скоростью движения вагонов, что влияет на уменьшение интервала движения и соответственно на увеличение пассажиропотока (грузопотока),
- универсальность, что обеспечивается возможностью перевозки, как пассажиров, так и грузов; возможностью применения его в различных вариантах исполнения транспортной системы: наземный, эстакадный, подземный;
- экологичность, обеспечиваемая применением электрооборудования в качестве источника энергии,
- высокая безопасность для пассажиров, связанная с отсутствием электрооборудования в конструкции вагонов.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОВОЗВОДИМОЕ КАРКАСНОЕ ЗДАНИЕ | 2019 |
|
RU2713847C1 |
| Монорельсовая транспортная система | 2023 |
|
RU2826677C1 |
| Автоматическая грузопроводная транспортная система с автономными транспортными модулями с тяговым линейным электроприводом | 2017 |
|
RU2678917C2 |
| АЭРОПОЕЗД И ПУТИ ЕГО ДВИЖЕНИЯ | 2017 |
|
RU2664091C1 |
| Агрегат дизель-генераторный подвагонный (АДП) | 2016 |
|
RU2638334C1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА С ВАГОНАМИ НА ВОЗДУШНОЙ ПОДУШКЕ | 2011 |
|
RU2488500C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ КОМБИНИРОВАННОГО ПОДВЕСА И ВЫСОКОСКОРОСТНОЙ МАГНИТОЛЕВИТАЦИОННЫЙ ТРАНСПОРТ С КОМБИНИРОВАННЫМ ПОДВЕСОМ, ФУНКЦИОНИРУЮЩИМ В СООТВЕТСТВИИ С ТАКИМ СПОСОБОМ | 2022 |
|
RU2782389C1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА С ПОДВИЖНЫМ СОСТАВОМ С ЛИНЕЙНЫМ ПРИВОДОМ | 2001 |
|
RU2180295C1 |
| РАЗВЕТВЛЕННАЯ КАБЕЛЬНАЯ ПЕТЛЕВАЯ РЕЛЬСОВАЯ ЦЕПЬ ДЛЯ ОГРАЖДЕНИЯ БЛОК-УЧАСТКОВ РАЗВЕТВЛЕННЫХ РЕЛЬСОВЫХ ПУТЕЙ В СИСТЕМАХ ЦЕНТРАЛИЗАЦИИ И АВТОБЛОКИРОВКИ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2340498C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1999 |
|
RU2158683C1 |
Изобретение относится к высокоскоростным транспортным системам, предназначенным для перевозки пассажиров и (или) грузов. Электрическая транспортная система включает вагоны, путевую структуру со станциями посадки, электрический двигатель, управляющую систему, расположенную дистанционно относительно путевой структуры и вагонов и осуществляющую общее управление движением вагонов, содержащую устройство управления, датчики и преобразователи частоты, обеспечивающие движение вагонов за счет преобразования угловой скорости в линейную скорость и регулирующие линейную скорость. Вдоль осевых линий шпал, уложенных на основании путевой структуры, расположены пассивные ролики и активные ролики, взаимодействующие во время движения вагонов с электрическими двигателями, преобразователями частоты и датчиками тока, осуществляющими включение и выключение электрических двигателей. В результате повышается эффективность и безопасность транспортной системы. 4 з.п. ф-лы, 3 ил., 1 табл.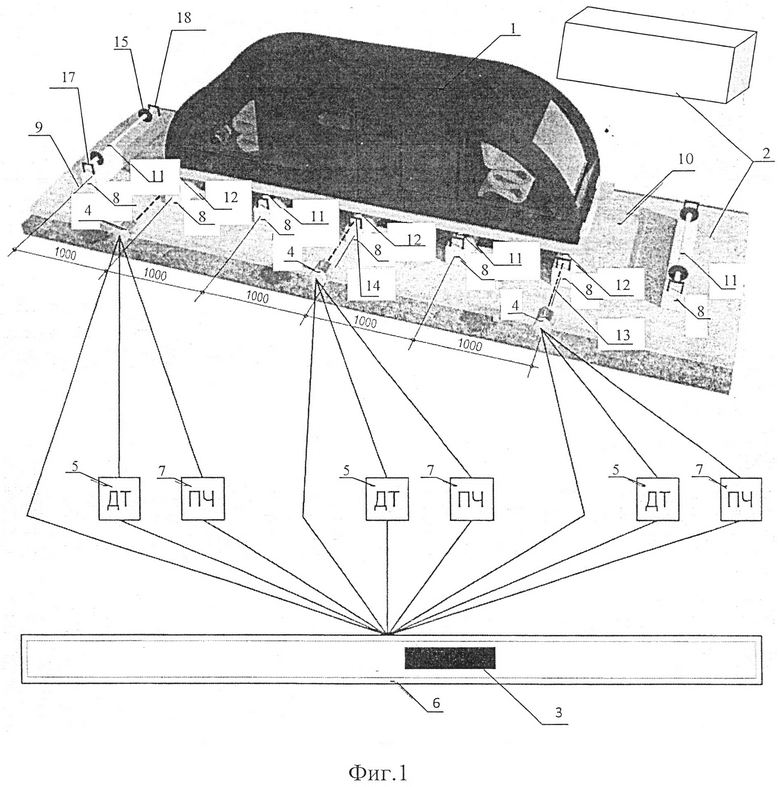
1. Электрическая транспортная система, включающая вагоны в количестве одного и более, разветвленную путевую структуру со станциями посадки (погрузки), расположенными на ней, устройство управления, электрический двигатель, датчики, отличающаяся тем, что устройство управления и датчики являются частью управляющей системы, осуществляющей общее управление движением вагонов и расположенной дистанционно относительно путевой структуры и вагонов, дополнительно содержащей преобразователи частоты, обеспечивающие движение вагонов за счет преобразования угловой скорости в линейную скорость и регулирующие линейную скорость; вдоль осевых линий шпал, уложенных на основании путевой структуры, расположены пассивные ролики и активные ролики, взаимодействующие во время движения вагонов с электрическими двигателями, преобразователями частоты и датчиками, выполненными в виде датчиков тока, осуществляющих включение и выключение электрических двигателей.
2. Электрическая транспортная система по п. 1, отличающаяся тем, что линейная скорость движения вагонов находится в зависимости от скорости вращения осей активных роликов и их диаметра.
3. Электрическая транспортная система по п. 1, отличающаяся тем, что максимальный расход электрической энергии, вырабатываемой электрическими двигателями, происходит в момент прохождения вагонов через активные ролики.
4. Электрическая транспортная система по п. 1, отличающаяся тем, что минимальный интервал между следующими друг за другом вагонами составляет 30 сек.
5. Электрическая транспортная система по п. 1, отличающаяся тем, что вагоны изготавливаются из легких материалов.
| Карманный электрический фонарь | 1981 |
|
SU1057748A1 |
| DE 4014700 A, 14.11.1991 | |||
| МНОГОФУНКЦИОНАЛЬНЫЙ ГОРОДСКОЙ КОМПЛЕКС И АВТОМАТИЗИРОВАННАЯ ПОДЗЕМНАЯ СИСТЕМА АДРЕСНОЙ ДОСТАВКИ ГРУЗОВ | 2013 |
|
RU2526202C1 |
| ВЫСОКОСКОРОСТНАЯ РАЗВЕТВЛЕННАЯ ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ИНДИВИДУАЛЬНОГО ПЕРЕМЕЩЕНИЯ ПАССАЖИРОВ | 1994 |
|
RU2106450C1 |

