Изобретение относится к космической технике и может быть использовано в системах управления движением (СУД) вокруг центра масс космических аппаратов (КА).
Из патентной литературы известны способы ориентации трех осей КА в орбитальную (подвижную) систему координат, использующие информацию не только прибора ориентации на Солнце, но обязательно информацию и от других измерительных приборов (см. а.с. №1655842, кл. B64G 1/00, от 02.12.1988 г.).
Наиболее близким из известных технических решений является выбранный в качестве прототипа способ ориентации осей космического аппарата в орбитальную систему координат, включающий запись в бортовую вычислительную машину параметров орбиты космического аппарата, задание космическому аппарату поисковой угловой скорости для обеспечения захвата Солнца полем обзора прибора ориентации, после чего снижение угловой скорости, обеспечивая нахождение Солнца в поле обзора прибора ориентации (см. пат. РФ №2247684 C2, кл. B64G 1/24, от 25.03.2003 г.).
Однако при этом способе для космических аппаратов, имеющих жестко закрепленные на корпусе солнечные батареи (СБ), используется ~60% солнечной энергии для заряда бортовых батарей (ББ) из-за того, что КА, сохраняя направление на центр Земли, отворачивает рабочую поверхность солнечных батарей от Солнца.
Задачей данного изобретения является создание способа управления движением космического аппарата вокруг своего центра масс, технический результат которого позволит на основании характеристик орбиты космического аппарата, введенных в его бортовую цифровую машину, и текущей информации, полученной от прибора, измеряющего направление на Солнце, на «солнечной» части витка, за минимально необходимое для этого время и с минимально необходимым расходом рабочего тела или кинетического момента его исполнительными органами обеспечить ориентацию связанных осей космического аппарата в солнечно-орбитальную систему координат (COCK), позволяющую непосредственно переориентировать оси КА в любую другую известную систему координат. При ориентации космического аппарата в солнечно-орбитальную систему координат достигаются условия для максимально возможного использования солнечной энергии на космическом аппарате с жестко закрепленными солнечными батареями.
Эта задача решается тем, что в способе ориентации осей космического аппарата, включающем запись в бортовую вычислительную машину параметров орбиты космического аппарата, задание космическому аппарату поисковой угловой скорости для обеспечения захвата Солнца полем обзора прибора ориентации, после чего снижение угловой скорости, обеспечивая нахождение Солнца в поле обзора прибора ориентации, В СООТВЕТСТВИИ С ИЗОБРЕТЕНИЕМ поддерживают величину угловой скорости, равную нулю, вокруг оси «XKA» космического аппарата, разворотами вокруг двух других осей совмещают единичный вектор направления на Солнце с осью «YKA» и, поддерживая такую ориентацию космического аппарата, осуществляют угловое движение вокруг оси «ZKA» в пределах угла ±10°, тем самым завершают ориентацию осей космического аппарата в солнечно-орбитальную систему координат.
При этом:
- ось «XKA» совпадает с осью «XCOCK» и лежит в плоскости орбиты КА, причем одну половину витка она направлена в сторону движения КА по орбите, а другую половину витка - в противоположную сторону;
- ось «YKA» совпадает с осью «YCOCK» и направлена на Солнце в течение всего витка;
- ось «ZKA» совпадает с осью «ZCOCK», дополняющей оси «XCOCK» и «YCOCK» до правой системы координат.
Далее изобретение поясняется с использованием чертежей, где на фигуре 1 показано расположение измерительных осей прибора в осях космического аппарата, а на фигуре 2 показаны результаты определения направления на Солнце и движение космического аппарата в приборных осях.
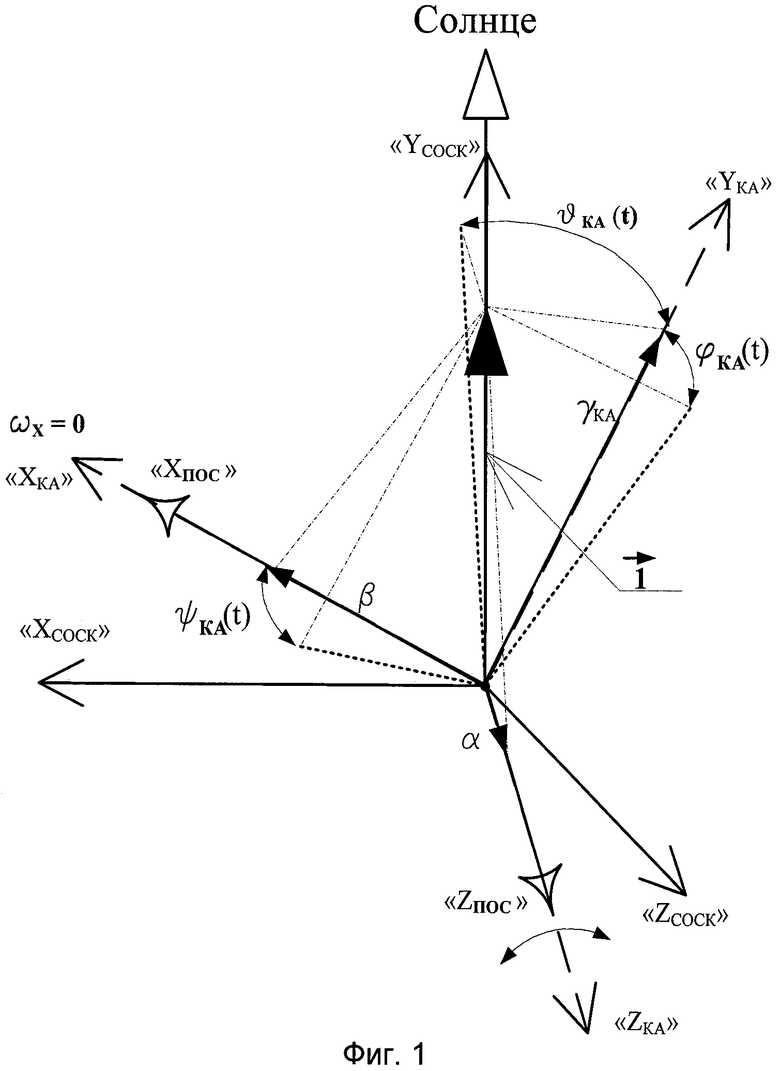
На фигуре 1 показан вариант расположения измерительных осей прибора ориентации на Солнце (ПОС) α и β, осей «XKA», «YKA», «ZKA» космического аппарата и единичного вектора направления на Солнце для неориентированного положения КА в пространстве.
где: α - измерительная ось ПОС, направленная по оси «ZKA»;
β - измерительная ось ПОС, направленная по оси «XKA»;
αПОС (t1, t2) - значение проекции единичного вектора направления на
Солнце на приборную ось α (ПОС) и ось «ZKA» КА в моменты времени t1, t2;
βПОС (t1, t2) - значение проекции единичного вектора направления на Солнце на приборную ось β (ПОС) и ось «XKA» КА в моменты времени t1, t2;
ΔφKA (t1, t2) - значение требуемого угла разворота КА вокруг оси «XKA» для ее совмещения с осью «XCOCK» в моменты времени t1, t2;
ΔψKA (t1, t2) - значение требуемого угла разворота КА вокруг оси «YKA» для ее совмещения с осью «YCOCK» в моменты времени t1, t2;
ΔϑKA (t1, t2) - значение требуемого угла разворота КА вокруг оси «ZKA» для ее совмещения с осью «YCOCK» в моменты времени t1, t2;
 - единичный вектор направления на Солнце;
- единичный вектор направления на Солнце;
«XKA», «YKA», «ZKA» - связанные оси КА;
«XCOCK», «YCOCK», «ZCOCK» - оси солнечно-орбитальной системы координат (COCK);
ХПОС - значение измерений ПОС при ориентации оси «XKA» на Солнце;
ZПОС - значение измерений ПОС при ориентации оси «ZKA» на Солнце;
γKA - проекция «единичного» вектора направления на Солнце на ось «YKA» КА;
γCOCK - проекция единичного вектора направления на Солнце на ось «YCOCK» COCK;
φKA(t) - угол, образованный осью «YKA» и проекцией единичного вектора на плоскость между осями «YKA», «ZKA» КА;
ψKA(t) - угол, образованный осью «XKA» и проекцией единичного вектора на плоскость между осями «ZKA», «XKA» КА;
ϑKA(t) - угол, образованный осью «YKA» и проекцией единичного вектора на плоскость между осями «XKA», «YKA» КА.
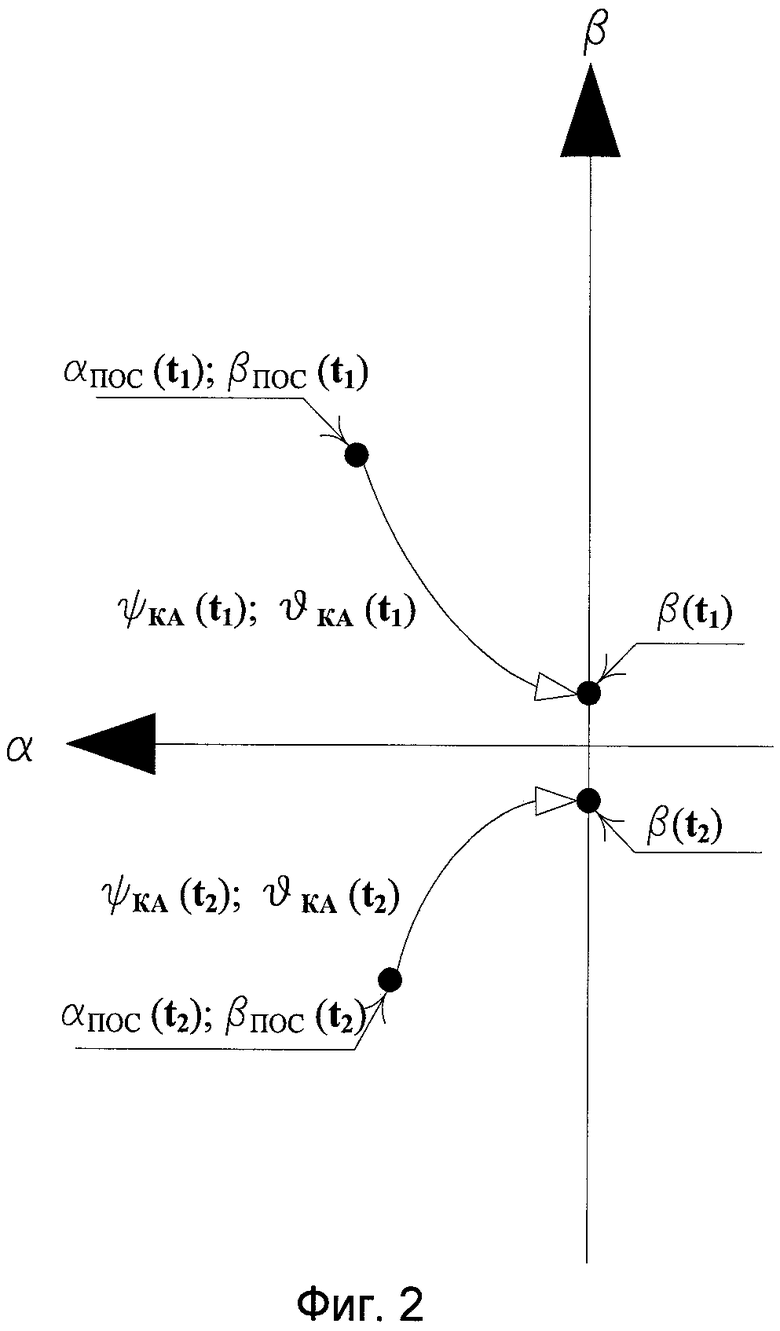
На фигуре 2 точками показаны для моментов времени t1 и t2 результаты определения направления на Солнце по измерениям ПОС в его приборных осях. Стрелками показаны изменения для моментов времени t1 и t2 при разворотах КА вокруг двух осей на углы ψKA(t) и ϑKA(t), для совмещения их с осями COCK.
На фигуре 1 единичный вектор направления на Солнце изображен в связанной с КА системе координат («XKA», «YKA», «ZKA») и в солнечно-орбитальной системе координат («XCOCK», «YCOCK», «ZCOCK») для одного и того же момента времени t. Для этого момента времени показаны значения проекций единичного вектора направления на Солнце в связанной с КА системе координат (βПОС, γKA, αПОС), рассчитанные по результатам измерения ПОС.
Из фигуры 1 следует равенство:

Следовательно, справедливо и равенство:

Знаки αПОС, βПОС и γKA присваиваются согласно компоновке ПОС в осях КА.
Значения проекций единичного вектора на связанные оси КА «XKA» и «ZKA» можно получить из равенств:


Где β(t1, t2) и α(t1, t2) - результаты измерения ПОС текущего направления на Солнце;
ХПОС - значение измерений ПОС при ориентации оси «XKA» на Солнце;
ZПОС - значение измерений ПОС при ориентации оси «ZKA» на Солнце.
Направление единичного вектора в связанной с КА системе координат можно задать и через направляющие косинусы:
cosβX=βПОС, где βX угол, образованный единичным вектором и осью «XKA»;
cosαZ=αПОС, где αZ угол, образованный единичным вектором и осью «ZKA»;
cosγ=γKA, где γ угол, образованный единичным вектором и осью «YKA».
Используя равенство (2, 3, 4) можно получить значения:
- угла ψKA между осью «XKA» и проекцией единичного вектора на плоскость между осями «XKA» и «ZKA»:
ψKA=arctg (αПОС/βПОС);
- угла φKA между осью «YKA» и проекцией единичного вектора на плоскость между осями «YKA» и «ZKA»:
φKA=arctg (αПОС/γKA);
- угла ϑKA между осью «YKA» и проекцией единичного вектора на плоскость между осями «XKA» и «YKA»»:
ϑKA=arctg (βПОС/γKA).
Согласно определения COCK проекции единичного вектора на ее оси должны иметь значения: γCOCK=1, αCOCK=βCOCK=0.
Для начала ориентации осей KA в COCK необходимо демпфировать вращение (ωx=0) вокруг оси «XKA» Для ориентации ее по оси «XCOCK». Разворотами вокруг осей «YKA» и «ZKA» совместить единичный вектор с осью «YKA» для ориентации ее по оси «YCOCK». Вокруг оси «ZKA», совпавшей с осью «ZCOCK», организовать угловое движение в пределах угла ±10°.
Значение угла ±10° выбрано исходя из того, что отклонение нормали к рабочей поверхности солнечных батарей в пределах угла ±10° практически не сказывается на интегральный приход электрической энергии в химические батареи (ХБ) СЭС от СБ СЭС. Выполняя указанное угловое движение, разворотами вокруг осей «YKA» и «ZKA» продолжают совмещение единичного вектора с осью «YKA» до момента, когда проекция единичного вектора (αПОС) на ось «ZKA» стабильно будет равна нулю.
Следует обратить внимание на то, что описанный способ ориентации связанных осей KA в COCK может применяться только на солнечной части витка.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ ОСЕЙ КОСМИЧЕСКОГО АППАРАТА В ОРБИТАЛЬНУЮ СИСТЕМУ КООРДИНАТ | 2009 |
|
RU2396189C1 |
| СПОСОБ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ ОСЕЙ СВЯЗАННОЙ СИСТЕМЫ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2428361C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ СОБСТВЕННОГО ВРАЩЕНИЯ КОСМИЧЕСКОГО АППАРАТА ВОКРУГ ЕГО ЦЕНТРА МАСС | 2009 |
|
RU2396188C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В СОЛНЕЧНО-ЗЕМНОЙ СИСТЕМЕ КООРДИНАТ | 2017 |
|
RU2671598C1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ С СИЛОВЫМИ ГИРОСКОПАМИ И ПОВОРОТНЫМИ СОЛНЕЧНЫМИ БАТАРЕЯМИ | 2001 |
|
RU2207969C2 |
| СПОСОБ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ОРБИТАЛЬНОЙ СИСТЕМЕ КООРДИНАТ | 2003 |
|
RU2247684C2 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ МОМЕНТОВ НА КОСМИЧЕСКИЙ АППАРАТ С СИЛОВЫМИ ГИРОСКОПАМИ И ПОВОРОТНЫМИ СОЛНЕЧНЫМИ БАТАРЕЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2196710C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЛЬБЕДО ЗЕМНОЙ ПОВЕРХНОСТИ | 2013 |
|
RU2547894C2 |
| СПОСОБ ОРИЕНТАЦИИ НАВИГАЦИОННОГО КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2680356C1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЁТКОЙ | 2015 |
|
RU2604268C2 |
Изобретение относится к управлению движением космического аппарата (КА) вокруг центра масс с использованием прибора, измеряющего направление на Солнце. При ориентации КА в солнечно-орбитальную систему координат (COCK) создаются условия для максимального использования солнечной энергии на КА с жестко закрепленными солнечными батареями. Способ заключается в том, что перед началом ориентации КА в бортовую вычислительную машину вводят параметры орбиты КА. Задают КА поисковую угловую скорость для обеспечения захвата Солнца полем обзора указанного прибора. Далее обнуляют составляющую этой угловой скорости вокруг связанной оси XКА, обеспечивая нахождение Солнца в поле обзора прибора. Поддерживая нулевую величину данной составляющей, разворотами КА вокруг двух других осей совмещают единичный вектор направления на Солнце со связанной осью YКА. В такой ориентации КА осуществляют угловое движение вокруг связанной оси ZKA в пределах угла ±10°, завершая ориентацию осей КА в COCK. Техническим результатом изобретения является возможность автоматически рассчитывать (на «солнечной» части витка) углы рассогласования текущего положения осей КА и осей COCK по результатам измерения только направления на Солнце и ориентировать исходя из этого КА в COCK. 2 ил.
Способ ориентации осей космического аппарата в солнечно-орбитальную систему координат, включающий запись в бортовую вычислительную машину параметров орбиты космического аппарата, задание космическому аппарату поисковой угловой скорости для обеспечения захвата Солнца полем обзора прибора ориентации, измеряющего направление на Солнце, снижение поисковой угловой скорости, обеспечивая нахождение Солнца в поле обзора прибора ориентации, отличающийся тем, что поддерживают величину угловой скорости, равную нулю, вокруг оси ХКА космического аппарата, разворотами вокруг двух других осей, совмещают единичный вектор направления на Солнце с осью YKA и поддерживая такую ориентацию космического аппарата осуществляют угловое движение вокруг оси ZKA в пределах угла ±10°, тем самым завершая ориентацию осей космического аппарата в солнечно-орбитальную систему координат.
| СПОСОБ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ОРБИТАЛЬНОЙ СИСТЕМЕ КООРДИНАТ | 2003 |
|
RU2247684C2 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1998 |
|
RU2131832C1 |
| US 6142422 A, 07.11.2000 | |||
| US 4759517 A, 26.07.1988. | |||

