Изобретение относится к космической технике и может быть использовано при проектировании систем управления движением (СУД) космических аппаратов (КА).
Известно, что при прямом использовании информации о положении Солнца, вырабатываемой прибором ориентации по Солнцу (ПОС), система управления движением, поддерживая постоянным положение Солнца в поле обзора прибора ПОС, обеспечивает ориентацию одной из связанных с КА осей или связанного с КА вектора в направлении на Солнце.
Из патентной литературы известен способ трехосной ориентации КА в орбитальной системе координат по информации прибора ориентации на Солнце (см., например, авт. св. №1655842, кл. В 64 G 1/00 от 02.12.88 г.).
Однако при этом недостаточно точно определено положение КА при развороте вокруг ориентированной на Солнце связанной с КА оси или ориентированного на Солнце связанного с КА вектора, т.е. недостаточно точно обеспечена трехостная ориентация и корректировка связанных с КА осей в пространстве.
Задачей данного изобретения является создание способа трехосной ориентации космического аппарата в орбитальной системе координат (ОСК) с достижением технического результата в виде уменьшения веса, объема и упрощения конструкции КА за счет уменьшения количества приборов и устройств на борту КА при осуществлении трехосной ориентации, а также расширении арсенала технических средств в этой области техники.
Эта задача решается тем, что в способе трехосной ориентации космического аппарата в орбитальной системе координат по информации прибора ориентации на Солнце, в соответствии с изобретением, в бортовую вычислительную машину вводят параметры орбиты, рассчитывают положения Солнца в поле обзора прибора ориентации для каждой точки орбиты для ориентации связанных с космическим аппаратом осей в орбитальной системе координат, задают космическому аппарату поисковую угловую скорость для обеспечения захвата Солнца полем обзора прибора ориентации, после чего снижают вплоть до нуля угловую скорость, обеспечивая нахождение Солнца в поле обзора прибора ориентации, далее производят разворот космического аппарата таким образом, чтобы Солнце в поде обзора прибора ориентации переместилось в требуемую начальную рассчитанную точку из положений Солнца в поле обзора прибора ориентации и далее непрерывно разворачивают космический аппарата от начальной точки в последующие рассчитанные положения Солнца в поле обзора прибора ориентации для каждой точки орбиты при требуемой ориентации связанных с космическим аппаратом осей в орбитальной системе координат.
Далее изобретение поясняется с использованием фигур.
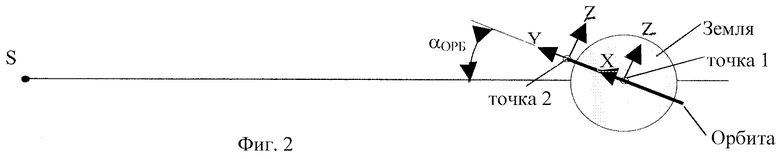
На фиг.1, поясняющей положения Солнца в поле обзора прибора ПОС, приведены (и на фиг.2 и 3) положение Солнца при движении КА по орбите в ориентированном относительно ОСК положении связанных с КА осей, которое может быть рассчитано для каждой точки орбиты.
На фиг.1 приведены следующие обозначения:
1 - поле обзора прибора ПОС;
Х, У, Z - связанные оси КА;
S - положение Солнца в поле обзора после захвата его прибором ПОС (произвольное);
α, β - углы положения Солнца, вырабатываемые ПОС;
S1 - массив рассчитанных положенией Солнца в поле обзора прибора ПОС при движении КА по орбите из точки 1 в точку 2 (см. фиг.2 и 3) при ориентации связанных с КА осей в ОСК;
Точка 1, точка 2 - точки начала и конца рассчитанных положений Солнца при движении КА по орбите из точки 1 в точку 2.
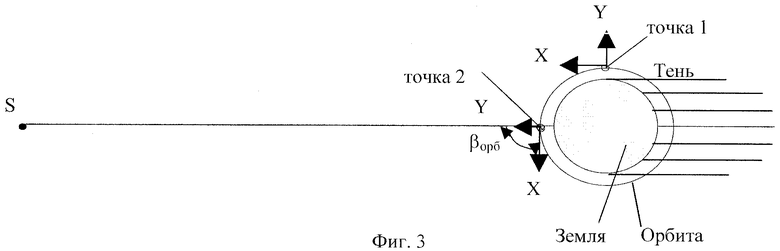
На фиг.2, поясняющей положение орбиты и связанных с КА осей относительно Солнца при виде с полюса Мира, приведены следующие обозначения:
Х, У, Z - связанные оси КА;
Точка 1, точка 2 - точки орбиты при движении КА по орбите, взятые как начало и конец для рассчета положения Солнца в поле обзора прибора ПОС при ориентации связанных с КА осей в ОСК;
αорб - угол между направлением на Солнце и плоскостью орбиты.
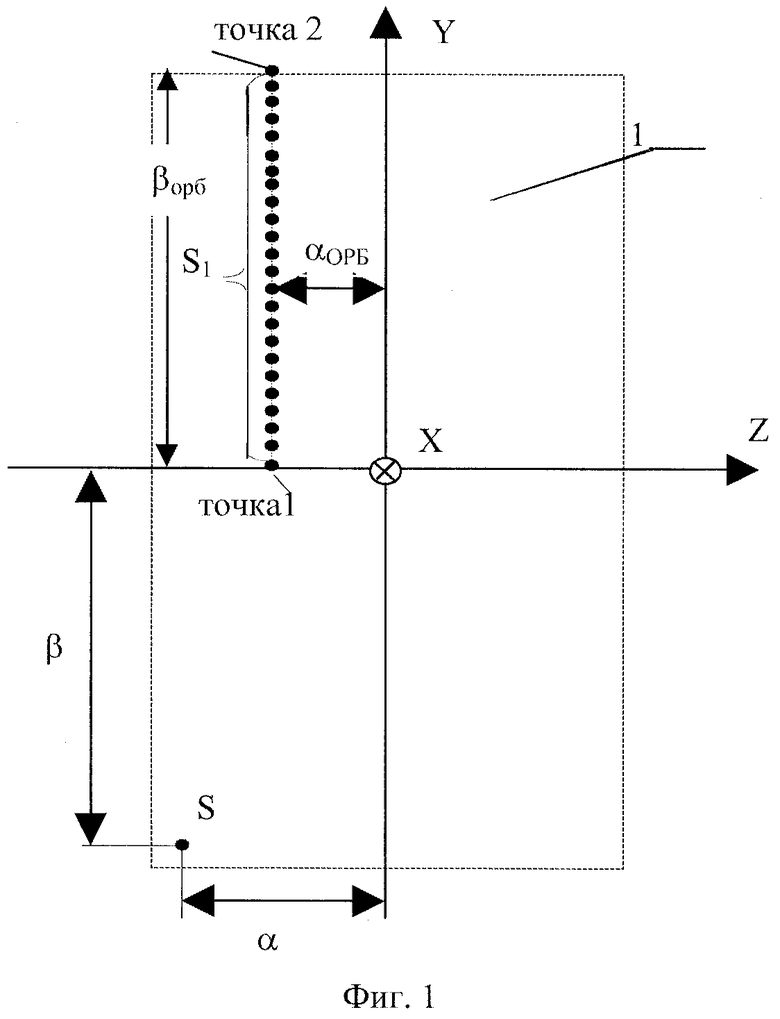
На фиг.3, поясняющей положение орбиты и связанных с КА осей относительно Солнца при виде в экваториальной плоскости Земли, приведены следующие обозначения:
Х, У, Z - связанные оси КА;
Точка 1, точка 2 - точки орбиты при движении КА по орбите, взятые как начало и конец для рассчета положения Солнца в поле обзора прибора ПОС при ориентации связанных с КА осей в ОСК;
βорб - угол между направлением на Солнце и связанной с КА осью Х.
Заявленный способ реализуется следующим образом.
До вывода на орбиту или в процессе функционирования на орбите в бортовую цифровую вычислительную машину (БЦВМ) вводят параметры орбиты по стартовому полетному заданию или по радиолинии от наземного комплекса траекторных измерений.
Рассчитывают положения Солнца в поле обзора ПОС для каждой точки орбиты для случая ориентации связанных с КА осей Х, У, Z, в ОСК (массив S1, фиг.1).
При выходе КА из тени (если на момент начала ориентации КА находился в тени) задают космическому аппарату поисковую угловую скорость (разворачивают КА) для обеспечения захвата Солнца полем обзора ПОС.
После захвата Солнца прибором ПОС и появления информации о текущих углах α, β положения Солнца в поле обзора прибора ПОС, вырабатываемых прибором ПОС, снижают (вплоть до 0) поисковую угловую скорость, обеспечивая нахождение Солнца в поле обзора ПОС, далее производят разворот КА таким образом, чтобы Солнце в поле обзора прибора ПОС переместилось в требуемую начальную рассчитанную точку из массива S1 (фиг.1) положений Солнца в поле обзора ПОС и далее непрерывно разворачивают КА от начальной точки в последующие рассчитанные точки.
При совпадении текущих углов α, β, вырабатываемых прибором ПОС, с рассчитанными углами α, β в n-последовательных рассчитанных точках (начальная плюс 2-3 точки) связанные с КА оси Х, У, Z ориентируют по направлению соответствующих осей ОСК и построение трехосной ориентации КА в ОСК заканчивается, а управление передается контуру поддержания ориентации КА в ОСК.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ ОСЕЙ КОСМИЧЕСКОГО АППАРАТА В ОРБИТАЛЬНУЮ СИСТЕМУ КООРДИНАТ | 2009 |
|
RU2396189C1 |
| СПОСОБ ОРИЕНТАЦИИ ОСЕЙ КОСМИЧЕСКОГО АППАРАТА В СОЛНЕЧНО-ОРБИТАЛЬНУЮ СИСТЕМУ КООРДИНАТ | 2009 |
|
RU2414392C1 |
| СПОСОБ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ ОСЕЙ СВЯЗАННОЙ СИСТЕМЫ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2428361C1 |
| СПОСОБ ПОДДЕРЖАНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ И ЦЕЛЕВОЙ НАГРУЗКОЙ | 2006 |
|
RU2341419C2 |
| СПОСОБ ПОДДЕРЖАНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ И ЦЕЛЕВОЙ НАГРУЗКОЙ | 2006 |
|
RU2356802C2 |
| Способ ориентации космического аппарата | 2020 |
|
RU2735120C1 |
| СПОСОБ ОТОБРАЖЕНИЯ БАЛЛИСТИЧЕСКОГО СОСТОЯНИЯ ОРБИТАЛЬНОЙ ГРУППИРОВКИ КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2461016C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ СОБСТВЕННОГО ВРАЩЕНИЯ КОСМИЧЕСКОГО АППАРАТА ВОКРУГ ЕГО ЦЕНТРА МАСС | 2009 |
|
RU2396188C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2361788C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА НА ПЛАНЕТУ | 1991 |
|
RU2021173C1 |
Изобретение относится к космической технике и может быть использовано при проектировании систем управления движением космических аппаратов (КА). Способ осуществляется по информации прибора ориентации на Солнце (ПОС) и заключается в том, что в бортовую вычислительную машину вводят параметры орбиты, рассчитывают положения Солнца в поле обзора ПОС для каждой точки орбиты для ориентации связанных с КА осей в орбитальной системе координат, задают КА поисковую угловую скорость для обеспечения захвата Солнца полем обзора ПОС, после чего снижают вплоть до нуля угловую скорость, обеспечивая нахождение Солнца в поле обзора ПОС. Далее производят разворот КА таким образом, чтобы Солнце в поле обзора ПОС переместилось в требуемую начальную рассчитанную точку из положений Солнца в поле обзора ПОС и далее непрерывно разворачивают КА от начальной точки в последующие рассчитанные положения Солнца в поле обзора ПОС для каждой точки орбиты при требуемой ориентации связанных с КА осей в орбитальной системе координат. Изобретение позволяет уменьшить вес, объем и упростить конструкцию КА за счет уменьшения количества приборов и устройств на борту КА при осуществлении трехосной ориентации, а также расширить арсенал технических средств в этой области техники. 3 ил.
Способ трехосной ориентации космического аппарата в орбитальной системе координат по информации прибора ориентации на Солнце, отличающийся тем, что в бортовую вычислительную машину вводят параметры орбиты, рассчитывают положения Солнца в поле обзора прибора ориентации для каждой точки орбиты для ориентации связанных с космическим аппаратом осей в орбитальной системе координат, задают космическому аппарату поисковую угловую скорость для обеспечения захвата Солнца полем обзора прибора ориентации, после чего снижают вплоть до нуля угловую скорость, обеспечивая нахождение Солнца в поле обзора прибора ориентации, далее производят разворот космического аппарата таким образом, чтобы Солнце в поле обзора прибора ориентации переместилось в требуемую начальную рассчитанную точку из положений Солнца в поле обзора прибора ориентации и далее непрерывно разворачивают космический аппарат от начальной точки в последующие рассчитанные положения Солнца в поле обзора прибора ориентации для каждой точки орбиты при требуемой ориентации связанных с космическим аппаратом осей в орбитальной системе координат.
| Космический аппарат с пассивной системой ориентации и стабилизации | 1988 |
|
SU1655842A1 |
| ПРИБОР ТРЕХОСНОЙ ОРИЕНТАЦИИ НА СОЛНЦЕ | 1995 |
|
RU2127421C1 |
| US 4426052 А, 17.01.1984 | |||
| US 4728061 А, 01.03.1988. | |||

