ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка является родственной и заявляет приоритет по отношению к предварительной заявке на патент США № 62/118 586, поданной 20 февраля 2015 г.
УРОВЕНЬ ТЕХНИКИ
Во время бурения производящей углеводороды скважины буровой раствор или «буровой глинистый раствор» непрерывно циркулирует от положения на поверхности скважины вниз к забою ствола бурящейся скважины, и снова обратно к поверхности. Возвращающийся глинистый раствор включает буровые шламы, полученные главным образом из пласта, пробитого буровым долотом. В случае многоствольных скважин, буровые шламы могут также включать металлические буровые шламы, полученные в результате фрезерования или бурения через стенки обсадной колонны для формирования бокового ствола скважины. Некоторые скважинные операции могут также включать операции по расширению ствола скважины, что может привести к уникальному виду шламов, возвращающихся на поверхность.
Как можно понять, повышение производительности и эффективности буровых работ может снизить стоимость бурения скважин для разведки нефти и газа и последующей добычи. Одним из способов определения эффективности бурения является наблюдение за характерными признаками буровых шламов, возвращаемых на поверхность во время буровых работ.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Приведенные ниже фигуры включены для иллюстрации некоторых аспектов настоящего изобретения и не должны рассматриваться в качестве исчерпывающих вариантов реализации изобретения. Раскрываемый объект изобретения допускает значительные модификации, изменения, комбинации и эквиваленты по форме и функции без отклонения от объема настоящего изобретения.
Фиг. 1 иллюстрирует схематическое изображение системы обработки изображений, которая может использоваться при осуществлении принципов данного изобретения.
Фиг. 2A-2C иллюстрируют три типовых вида или класса частиц, которые могут быть распознаны, используя устройство обработки изображений, которое проиллюстрировано на Фиг. 1.
Фиг. 3A-3C иллюстрируют три частицы, проиллюстрированные на Фиг. 2A-2C, и демонстрируют типовые измерения угловых размеров для определения угловатости.
Фиг. 4 иллюстрирует схематическое изображение типовой системы бурения, которая может включать систему обработки изображений, проиллюстрированную на Фиг. 1.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к операциям бурения ствола скважины а, конкретнее, к мониторингу скважинных шламов в возвращающихся буровых растворах, определению размера и распределению по форме частиц, присутствующих в скважинных шламах.
Мониторинг изменений размера бурового шлама, распределения по размеру, по форме и по объему во время активных операций бурения может привести к лучшему пониманию текущего состояния скважины, продуктивности бурения, и эффективности очистки отверстия. Связь между изменениями этих параметров и эксплуатационными условиями может быть выражена несколькими способами, включающими: определение наличия пластов аномально высокого давления путем обнаружения увеличения нагрузок шлама и изменений в распределении по размеру шламов; определение эффективности долота и бурения путем анализа объема, размера и формы шлама; определение эффективности очистки путем мониторинга объема шлама во время операции очистки (например, объем шламов увеличивается с увеличением эффективности очистки, а затем уменьшается по мере удаления шлама из отверстия); и определение изменений в составе геологической формации путем мониторинга размера, распределения по размеру, и формы шлама.
В соответствии с вариантами реализации настоящего изобретения, система обработки изображений может использоваться для мониторинга скважинных шламов в возвращающихся буровых растворах и определения размера и распределения по форме частиц, присутствующих в скважинных шламах в режиме реального времени или в режиме, приближающемся к режиму реального времени. Отклонения от результатов измерения базового уровня могут быть просигнализированы на консоли оператора, например, или отображены в сочетании с текущими измерениями, и использованы для изменения выполнения операций (например, приложения большего или меньшего усилия на буровое долото, или изменения эквивалентной циркуляционной плотности [ЭЦП] бурового раствора, и т.д.). В некоторых вариантах реализации изобретения может быть инициирован сигнал тревоги, который порекомендует оператору скважины заменить буровое долото.
Один описанный способ включает получение изображения буровых шламов системой сбора данных, которая включает один или несколько процессоров. Система сбора данных может составлять часть системы обработки изображения, а буровые шламы могут образовываться из ствола бурящейся скважины, и могут включать в себя множество частиц. Затем изображение буровых шламов можно проанализировать с помощью одного или нескольких процессоров путем получения трех результатов измерений двумерных расстояний для каждой частицы и получения четырех результатов измерений угловых размеров для каждой частицы. Затем один или несколько процессоров определяют по меньшей мере одно из: распределение частиц буровых шламов по размеру и распределение буровых шламов по форме, на основании трех результатов измерений двумерного расстояния и четырех результатов измерений угловых размеров каждой частицы.
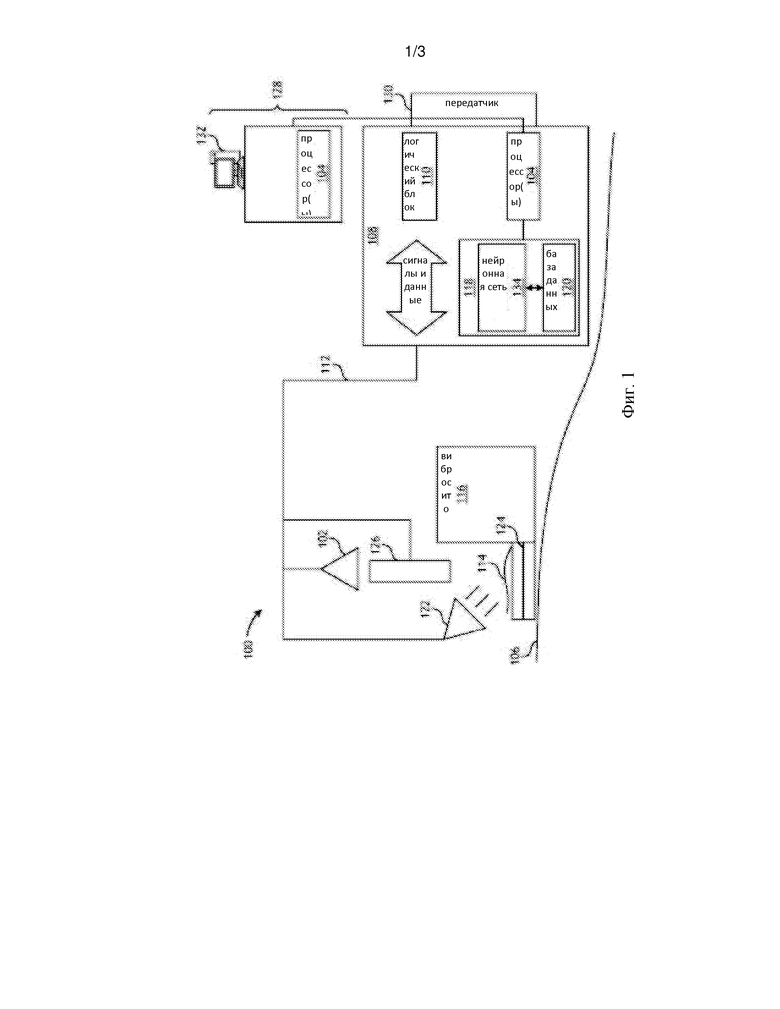
Согласно Фиг. 1, проиллюстрированное представляет собой схематическое изображение системы обработки изображений 100, которая может использоваться при осуществлении принципов настоящего изобретения. Тем не менее, следует понимать, что система 100 обработки изображений представляет собой лишь пример одного типа системы обработки изображений, приспособления или устройства, которые могут использоваться в соответствии с принципами настоящего изобретения. Действительно, другие типы и конфигурации систем обработки изображений, как например, потоковые системы обработки изображения или системы, которые включают другие конфигурации компьютерного проектирования, могут альтернативно включать принципы настоящего изобретения, не отступая от объема изобретения. Соответственно, нижеследующее описание системы обработки изображения 100 представлено лишь для иллюстрации, и не должно рассматриваться как ограничивающее.
Как проиллюстрировано, система 100 обработки изображений может содержать одно или большее количество устройств 102 обработки изображений, которые соединены с возможностью передачи информации или иным образом связаны с одним или большим количеством процессоров 104. Устройство 102 обработки изображений и/или процессоры 104 могут быть расположены в положении 106 на поверхности скважины, как например, на буровой установке или на участке бурения, примыкающем к стволу бурящейся скважины. Тем не менее, в некоторых вариантах реализации изобретения любой из компонентов, проиллюстрированных на Фиг. 1, может находиться в удаленном месте, не отступая от объема изобретения. Например, некоторые модули данных и обработки могут располагаться в удаленном операционном центре, где данные могут быть получены и проанализированы геологом, лицом, ведущим учет данных о буровом глинистом растворе, или другим регистрирующим специалистом. Кроме того, удаленное расположение может содержать мобильное устройство, такое как планшет или карманный компьютер, а данные и/или результирующий вычислительный анализ могут передаваться через систему доставки данных, такую как INSITE ANYWHERE® компании Halliburton, или посредством любого другого стандарта мобильной передачи данных, используемого в промышленности. Система 100 обработки изображений может также содержать систему 108 сбора данных, которая может содержать логический блок 110, возможно, содержащий программируемую подсистему сбора данных. Система 108 сбора данных может быть соединена с возможностью передачи информации с устройством 102 обработки изображений посредством любой подходящего средства передачи информации (например, проводного или беспроводного). В процессе работы устройство 102 обработки изображений может предоставлять изображения и/или видео буровых шламов 114, когда они перемещаются по одному или нескольким виброситам 116, а логический блок 110 может использоваться для получения данных 112 изображения от устройства 102 обработки изображений для обработки данных. В некоторых вариантах реализации изобретений, устройство 102 обработки изображения может содержать камеру, которая записывает данные с временными интервалами, в зависимости от операции бурения (например, бурение, прокачка, очистка, и т.д.).
Система 108 сбора данных может дополнительно содержать запоминающее устройство 118, соединенное с возможностью передачи информации с процессором (процессорами) 104 и может использоваться для компиляции или хранения полученных данных 112 изображения, а также других данных, возможно, в связанной базе данных 120. Устройство (устройства) 102 обработки изображений может содержать камеру любого типа, способную захватывать изображения и/или видео бурового шлама 114. Например, в некоторых вариантах реализации изобретения устройство 102 обработки изображений может содержать одну или больше камер ПЗС (прибор с зарядовой связью) или одну или несколько высокочувствительных или инфракрасных камер. Устройство 102 обработки изображения может быть выполнено с возможностью использоваться в сочетании с одним или несколькими источниками 122 света, такими как источник белого света, источник света на основе лампы накаливания (например, лампа накаливания с вольфрамовой нитью), источник инфракрасного света, лазер, один или более светоизлучающих диодов (СИД), или любая их комбинация.
Использование лазера в качестве источника 122 света может оказаться полезным для того, чтобы позволить оператору направить на буровые шламы 114 электромагнитное излучение с известной длиной волны. В результате, буровой раствор и различные присадки, находящиеся в нем во взвешенном состоянии (например, поглощающие материалы и т.д.) может стать относительно прозрачным в отличие от сопряженных буровых шламов 114, так что устройству 102 обработки изображений для захвата изображения видны только буровые шламы 114. В качестве альтернативы, или в дополнение к этому, одно или несколько устройств 126 для модификации энергии, как например, поляризатор, расщепитель пучка, и/или фильтр может помещаться между буровыми шламами 114 и устройством 102 обработки изображений для уменьшения количества или ширины длин волн, видимых устройством 102. Например, поляризатор может использоваться либо для выравнивания световой энергии в направлениях "P" или "S" (так что обработанная энергия p-поляризована или s-поляризована), либо для получения сочетания P и S поляризованной энергии. Расщепитель пучка может использоваться для уменьшения спектра принимаемой энергии в каком-либо выбранном или предпочтительном диапазоне длин волн. Наконец, фильтр может использоваться для дальнейшего сужения диапазона до выбранного спектра прежде обнаружения изображения.
В некоторых вариантах реализации изобретения устройство 126 для модификации энергии может избирательно регулироваться для получения хорошего контраста изображения для обнаружения бурового шлама 114 в буровом растворе, который имеет динамическую композицию. Выбор материалов, используемых в устройствах 126 для модификации энергии, может зависеть от наличия опасностей окружающей среды, включая присутствующие химические растворы. Эти материалы могут включать, в частности, стекло, полимеры и металлы.
В процессе работы, источник 122 света может быть выполнен с возможностью освещения буровых шламов 114, осажденных на вибросито 116, которое может содержать один или несколько экранов 124 вибросита, по которым проходят буровые шламы 114. Электромагнитное излучение, обеспечиваемое источником 122 света, может усиливать изображения, зафиксированные устройством 102 обработки изображения. Устройство 102 обработки изображений может быть сфокусировано на экране 124 (или заданной фокальной плоскости, смещенной от экрана 124), чтобы захватывать изображения буровых шламов 114 при их перемещении по экрану 124 вибросита. Тем не менее, в других вариантах реализации изобретения устройство 102 обработки изображений может быть выполнено с возможностью мониторинга буровых шламов 114 в точке непосредственно после вибросита 116, как например, в другом устройстве (например, шнековом разгрузочном желобе) который обрабатывает буровые шламы 114. В других вариантах реализации изобретения, устройство 102 обработки изображений может быть выполнено с возможностью мониторинга потока буровых шламов 114 через любой патрубок, трубопровод или интерфейс, общий для нефтегазовой промышленности.
После того, как электромагнитная энергия, излучаемая буровыми шламами 114, обрабатывается устройством или через устройство 126 для модификации энергии (в случае наличия), затем устройство 102 обработки изображений может принимать электромагнитную энергию и передавать данные 112 изображения буровых шламов 114 в систему 108 сбора данных для обработки данных. В некоторых вариантах реализации изобретения система 108 сбора данных может содержать и иным образом составлять часть удаленной рабочей станции 128. В других вариантах реализации изобретения, система 108 сбора данных может быть выполнена с возможностью обмена информацией с удаленной рабочей станцией 128 посредством передатчика 130, который может содержать любые формы проводной или беспроводной связи, такие как, но не ограничиваясь перечисленным, провода, волоконная оптика, беспроводные средства (например, радиочастотные и т.д.). В таких вариантах реализации изобретения данные 112 изображения буровых шламов 114 могут быть переданы на удаленную рабочую станцию 128 для обработки с соответствующими процессорами 104.
Обработка данных 112 изображения бурового шлама 114 может приводить к определению различных характеристик бурового шлама 114, такого как размер частиц, и распределение по форме частиц, находящихся во взвешенном состоянии в буровом шламе 114. Как описано более подробно ниже, процессоры 104 могут быть запрограммированы для определения угловатости частиц, обнаруженных в буровом шламе 114, и таким образом классифицировать частицы в классы формы. Система 108 сбора данных и/или удаленная рабочая станция 128 могут содержать одно или несколько периферийных устройств 132, таких как экран компьютера, графический пользовательский интерфейс, мобильное устройство, принтер или любую их комбинацию. Периферийные устройства 132 могут предоставить оператору графическое отображение результатов обработки данных 112 изображения буровых шламов 114.
Система 108 сбора данных может быть в целом охарактеризована как компьютер или компьютерная система, а компьютерное оборудование, связанное с системой 108 сбора данных, такое как процессор(ы) 104, может использоваться для реализации различных способов и алгоритмов, описанных в данном документе. Конкретнее, процессор(ы) 104 может быть выполнен с возможностью выполнения одной или нескольких последовательностей команд, программного защитного экрана или кода, хранящихся на долговременном носителе, считываемом при помощи компьютера, как например запоминающем устройстве 118. Процессор 104 может быть, например, микропроцессором общего назначения, микроконтроллером, цифровым процессором сигналов, специализированной интегральной схемой, программируемой пользователем матрицей логических элементов, программируемым логическим устройством, контроллером, конечной машиной, логической схемой, дискретными аппаратными компонентами, искусственной нейронной сетью или любым подобным подходящим объектом, который может выполнять вычисления или другие манипуляции данными. Запоминающее устройство 118 может содержать по меньшей мере одно из: оперативного запоминающее устройство (ОЗУ), флэш-память, постоянное запоминающее устройство (ПЗУ), программируемое постоянное запоминающее устройство (ППЗУ) и электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ). Запоминающее устройство 118 может дополнительно содержать один или несколько регистрирующих устройств, жестких дисков, съемных дисков, дисков CD-ROM, DVD дисков или любых других подобных подходящих устройств хранения или носителей данных.
Исполняемые последовательности, описанные в данном документе, могут быть реализованы с одной или несколькими последовательностями кода, содержащимися в запоминающем устройстве 118. В некоторых вариантах реализации изобретения такой код можно считывать в запоминающее устройство 118 с другого машиночитаемого носителя данных. Выполнение последовательностей инструкций, содержащихся в запоминающем устройстве, может заставить процессор 104 выполнить этапы способа, описанные в данном документе. Как будет понятно, один или несколько процессоров 104 в многопроцессорной компоновке могут также использоваться для выполнения последовательностей команд в запоминающем устройстве 118. Кроме того, фиксированная проводная схема может использоваться вместо или в сочетании с программными командами для реализации различных вариантов реализации изобретения, описанных в данном документе. Таким образом, настоящие варианты реализации изобретения не ограничиваются какой-либо конкретной комбинацией аппаратного и/или программного обеспечения.
После получения изображений принятых от устройства 102 обработки изображений, система 108 сбора данных может выполнять или проводить различные измерения на множестве частиц, находящихся во взвешенном состоянии в буровых шламах 114. Конкретнее, программное обеспечение, хранящееся в запоминающем устройстве 118 (например, база данных 120), может быть запрограммировано с инструкциями, которые, при выполнении процессором (процессорами) 104 выполняют требуемые измерения на множестве частиц. Программное обеспечение может быть запрограммировано на распознавание границ или краев частиц путем обнаружения контраста между данной частицей и ее окружением.
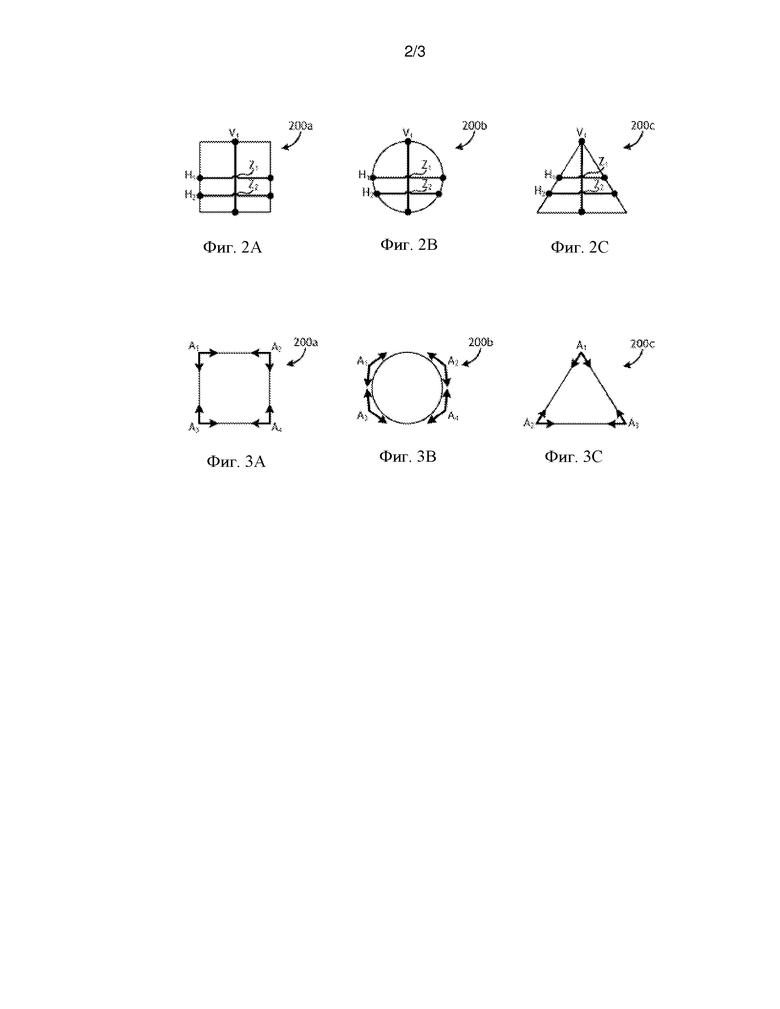
Ссылаясь на Фиг. 2A, 2B и 2C, продолжая ссылаться на Фиг. 1, проиллюстрированное представляет собой три типовых вида или класса частиц 200a, 200b и 200c, которые могут быть распознаны или иным способом обработаны, используя систему 100 обработки изображений, которая проиллюстрирована на Фиг. 1, в соответствии с одним или несколькими вариантами реализации изобретения. Частицы 200a-c может быть вовлечены в буровые шламы 114 и одно или несколько изображений частиц 200a-c может быть зафиксировано с помощью устройства 102 обработки изображений и переданы в систему 108 сбора данных в виде данных 112 изображения для обработки данных. Как проиллюстрировано, первая частица 200a большей частью квадратная, вторая частица 200b большей частью круглая, а третья частица 200c большей частью треугольная.
Специалисты, квалифицированные в уровне техники, легко поймут, что кубические, закругленные и пирамидальные формы содержат три основные формы частиц, которые могут быть вовлечены в буровые шламы 114. Первая частица 200a может служить признаком вовлеченной в буровые шламы 114 частицы большей частью кубической формы. Кубические частицы могут указывать на наличие «скалывания», которые содержат кубик материала, который выбился или «скололся» от стенки ствола скважины во время операций бурения. Скалывание может возникать из-за недостаточного давления в стволе скважины, а плотность сколотых частиц может быть хорошим показателем работоспособного или неработоспособного давления пор. Идентификация кубических частиц может оказаться особенно выгодной в условиях управляемого бурения под давлением, когда оператор может решить применить большее противодавление на поверхностных насосах, или манипулировать поверхностными дросселями, или изменить вес бурового раствора с присадками при позитивной идентификации частицы кубической формы.
Вторая частица 200b может служить признаком вовлеченных в буровые шламы 114 частиц сферической или округлой формы. Частицы сферической формы могут указывать на наличие в скважине сработавшегося песка или того, что в стволе скважины происходит галтовка. Третья частица 200c может служить признаком наличия шламов по большей части пирамидальной формы, которые обычно производятся горными породами, пробитыми некоторыми типами буровых долот и фрез. Например, при пробивании скальных пластов во время выполнения операций бурения буровые долота и фрезы, которые используют поликристаллические алмазные компактные режущие части, могут также производить частицы по большей части пирамидальной или усеченной пирамидальной формы. Хотя наиболее распространенным типом частиц, возникающим в результате операций расширения для увеличения диаметра ствола скважины, является частица кубической формы или частица блочного вида (то есть первая частица 200a, которая проиллюстрирована на Фиг. 2A), частицы пирамидальной формы или усеченной пирамидальной формы также могут возникать в результате операции расширения ствола скважины.
После получения изображения частиц 200a-c в системе 108 сбора данных, процессор 104 может быть выполнен с возможностью получения трех результатов измерений двумерного расстояния для каждой частицы 200a-c. Для этого процессор 104 может первично определить и иным образом наложить ортогональные оси X и Y на частицы 200a-c. Более длинная из осей X и Y может быть определена как ось Х и помечена как первый результат измерения или длина V1, а более короткая из осей X и Y может быть определена как ось Y и помечена как второй результат измерения или ширина H1. Ширина H1 может делить пополам V1 и иным способом измеряться в средней точке между концами длины V1. Третье измерение или промежуточная ширина H2 может быть измерена в средней точке между H1 и любым из концов V1. Как проиллюстрировано, промежуточная ширина H2 может быть измерена перпендикулярно V1 так, что ширина H1 и промежуточная ширина H2 проходят параллельно друг другу. Как будет понятно, путем получения третьего результата измерения для промежуточной ширины H2, степени свободы при определении формы и размера частиц могут быть значительно уменьшены.
Сравнивая размер каждого результата измерения V1, H1, H2, можно определить, является ли рассматриваемая частица большей частью квадратной формы, большей частью круглой формы или большей частью треугольной формы. Конкретнее, если для данной частицы V1 ≈ H1 ≈ H2, то данная частица вероятно имеет квадратную форму, как например первая частица 200a. Однако, если для данной частицы V1 ≈ H1 > H2, то данная частица вероятно имеет круглую форму, как например вторая частица 200b. Кроме того, если для данной частицы V1 > H1 < H2, то данная частица вероятно имеет треугольную форму, как например третья частица 200c. Соответственно, три результата измерения расстояния V1, H1, H2 могут обеспечивать базовую категорию формы для каждой частицы 200a-c: квадратную, круглую и треугольную. В тех случаях, когда для данной частицы соотношение сторон между V1 и H1 составляет около 1/1000, данная частица может быть описана и иным способом определена как длинный и тонкий стержень.
В некоторых вариантах реализации изобретения форма бурового шлама 114 может контролироваться для определения распределения по размеру, которое существует в трехмерном пространстве. В качестве базового примера распределение по размеру частиц 200a-c в буровых шламах 114 может быть определено путем усреднения трех результатов измерений V1, H1, H2 вместе для каждой обнаруженной частицы 200a-c, а затем деления на три. Средний размер частиц для выбора частиц, по меньшей мере двух, будет распределен по бункерам на основании диапазона размеров частиц. Распределения будут включать по меньшей мере два бункера, но могут включать в себя сто или более бункеров, на основании разнообразия размера частиц. Например, каждый бункер может учитывать изменение размера частиц в размере порядка микрон, но в качестве альтернативы может учитывать измерение распределение любого порядка. Кроме того, может быть определено распределение трехмерного размера. Длина V1 может обрабатываться на отдельной оси, чем среднее арифметическое для H1 и H2 относительно осей с бункерами как было указано ранее, для создания плоскости с распределением по размеру.
Другой способ определения распределения по размерам может включать в себя определение статистического распределения размеров с использованием по меньшей мере распределения t, z, или chi частиц на основании среднего значения трех результатов измерений минимум трех частиц, длины V1 минимум из трех частиц, или любые другие сделанные измерения. Как будет понятно, распределения t, z или chi могут обеспечивать диапазон частиц, наблюдаемый на основании среднего значения и вариации размеров частиц. Соответственно, когда система 100 обработки изображений идентифицирует основную форму контролируемых частиц 200a-c, можно рассчитать распределение различных размеров. Это может оказаться полезным для определения скважинных условий.
Как будет понятно, получение трех результатов измерений расстояния V1, H1, H2 может привести к определению взаимосвязи для многих форм частиц, но может быть неясно, имеет ли данная частица изогнутую форму, как в пределах круга, или имеет четкие углы, такие как квадрат, треугольник или другой тип многоугольника. Соответственно, варианты реализации настоящего изобретения дополнительно содержат определение угловатости частиц 200a-c в буровом шламе 114 с использованием четырех результатов измерений угловых размеров и, тем самым, дальнейшее различение по трем основным классам измерений: квадратным, круглым и треугольным.
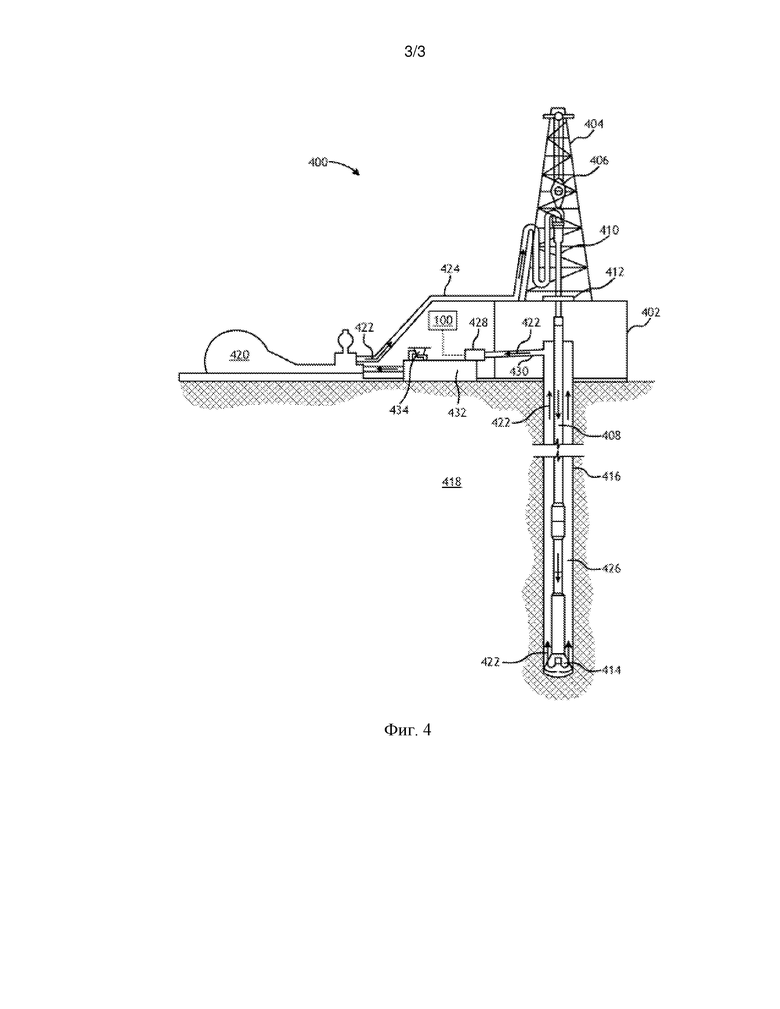
Ссылаясь на Фиг. 3A, 3B и 3C, проиллюстрированное представляет собой три частицы 200a-c на Фиг. 2A-2C, показывая типовые измерения угловых размеров для определения угловатости, в соответствии с одним или несколькими вариантами реализации изобретения. Как проиллюстрировано, угловатость частиц 200a-c может быть определена путем измерения по меньшей мере четырех углов на каждой частице 200a-c, показанных как первый угол A1, второй угол A2, третий угол A3, и четвертый угол A4. Во время приема изображений частиц 200a-c в системе 108 сбора данных, процессор 104 может быть выполнен с возможностью получения результатов измерений для четырех углов A1-A4. В некоторых вариантах реализации изобретения, процессор 104 может быть выполнен с возможностью определения месторасположения углов на основании контраста между данной частицей и фоном, окружающим частицу. В некоторых вариантах реализации изобретения местоположение каждого результата измерения угла может быть равноудаленно отстоящим друг от друга относительно границы данной частицы, если только частица не является пирамидальной. Если частица имеет пирамидальную форму, три угла будут измеряться на трех вершинах треугольной формы. Тем не менее, в других вариантах реализации изобретения, месторасположение углов может быть определено в соответствии с конкретным программным обеспечением, реализованным в системе 100 обработки изображений.
Для определения того, имеет ли данная частица 200a-c квадратную, округлую или треугольную форму, могут быть измерены четыре угла A1-A4. Угловатость данной частицы 200a-c может быть рассчитана как сумма четырех углов A1-A4 и находиться в пределах между 180° и 720°. Суммы ближе к 180° будут считаться с высокой степенью угловатости, и, вероятно, соответствуют треугольной структуре, а суммы, ближе к 720°, будут считаться по большей части не угловатыми и, вероятно, соответствуют круговой структуре. Сравнивая результаты измерений для четырех углов A1-A4 данной частицы 200a-c, можно определить, является ли данная частица 200a-c большей частью квадратной, круглой или треугольной. Например, если для данной частицы A1 ≈ A2 ≈ A3 ≈ A4, а четыре угла A1-A4 находятся в диапазоне между около 70° и около 110°, то данная частица, вероятно, имеет квадратную форму, такую как первая частица 200a. Однако, если для данной частицы A1 ≈ A2 ≈ A3 ≈ A4, а четыре угла A1-A4 все больше 90°, то данная частица, вероятно, имеет круглую форму, такую как вторая частица 200b. Более того, если для данной частицы A1 ≈ A2 ≈ A3 и A4 = 0, а сумма измеренных трех углов A1-A3 составляет приблизительно 180°, то данная частица, вероятно, имеет треугольную форму, такую как третья частица 200c.
С тремя измеренными расстояниями V1, H1, H2 и четырьмя измеренными углами A1-A4, большинство форм частиц 200a-c можно отличить и классифицировать с помощью системы 108 сбора данных как квадратную, круговую или треугольную. Однако, для преобразования результатов этих измерений в трехмерное пространство и, таким образом, классификации частиц 200a-c на большей частью кубические, сферические или пирамидальные, могут быть получены дополнительные два результата измерения расстояния и дополнительные два измерения угловых размеров. В таких вариантах реализации изобретения по меньшей мере два устройства 102 обработки изображений могут использоваться для определения относительной толщины каждой частицы 200a-c. Конкретнее, и снова со ссылкой на Фиг. 2A-2C, первое устройство 102 обработки изображений может быть выполнено с возможностью получения четвертого результата измерения расстояния Z1 в Z-направление (т.е., вне страницы, проиллюстрированной на Фиг. 2A-2C) на пересечении H1/V1, а второе устройство 102 обработки изображений может быть выполнено с возможностью получения пятого результата измерения расстояния Z2 в Z-направление на пересечении H2/V1. Z-направление дополнительно определяется как 90° от H1 или H2 (в зависимости от того, какое измерение выполняется) и перпендикулярно V1.
Четвертый результат измерения Z1 может соответствовать фокальной плоскости, связанной с первым устройством 102 обработки изображений, а пятое измерение Z2 может соответствовать фокальной плоскости второго устройства 102 обработки изображений. Фокальная плоскость каждого устройства 102 обработки изображений может располагаться там, где захваченные изображения для устройства 102 обработки изображений являются четкими или находящиеся в фокусе (т.е. в фокальной плоскости объекты мало искажаются или вообще не искажаются). Регулируя фокусирующие элементы и линзы устройств 102 обработки изображений, фокальная плоскость для устройств 102 обработки изображений может быть выбрана так, чтобы располагаться на известной толщине (или расстоянии) вдоль оси Z, так что разница между фокальными плоскостями каждого устройства 102 обработки изображений может быть известна. Измеряя «четкость» или искажение (т.е., отсутствие резкости) извлеченных изображений частиц 200a-c в каждой фокальной плоскости на пересечениях H1/V1 и H2/V1, система 108 сбора данных может быть способна определять измерения толщины для Z1 и Z2. Более конкретно, искажение изображений можно сравнить с известной опорной точкой, которая может представлять собой любое постоянное приспособление, из которого система 108 сбора данных может различать величину (например, процент) искажения изображения на пересечениях H1/V1 и H2/V1. Например, в некоторых вариантах реализации изобретения, опорной точкой может быть верхняя поверхность экрана 124 вибросита, но в качестве альтернативы, не отступая от объема изобретения, может быть запрограммирована виртуальная опорная точка в системе 108 сбора данных.
В процессе работы, процессор 104 может быть выполнен с возможностью вычисления величины искажения частицы 200a-c в каждой фокальной плоскости на пересечениях H1/V1 и H2/V1, в зависимости от толщины. Путем ссылки на опорную точку может быть применена модель, которая хранится в базе данных 120 и ссылается на опорную точку, генерируя или иным образом обеспечивая процент искажения. Модель может быть моделью искажения, которая обеспечивает известные проценты четкости или искажения, которые можно сравнить с полученными, чтобы определить толщину четвертого и пятого результата измерений Z1 и Z2 на пересечениях H1/V1 и H2/V1, соответственно. Поскольку известна разница между фокальными плоскостями или толщинами обнаружения каждого устройства 102 обработки изображений, сравнение четвертого и пятого результатов измерений Z1 и Z2 на пересечениях H1/V1 и H2/V1 может привести к разнице в толщине, что может указывать на трехмерные контуры для частиц 200a-c.
Кроме того, помимо определения и измерения четырех углов A1-A4, как обсуждалось выше, процессор 104 может быть выполнен с возможностью определения и измерения двух дополнительных угловых измерений, чтобы помочь отобразить заданную частицу 200a-c в трехмерном пространстве. Для частиц, которые большей частью являются квадратными или круглыми, такими как первая и вторая частицы 200а, b, соответственно, дополнительные угловые измерения могут быть получены в плоскости, перпендикулярной плоскости, пересекающей четыре угла A1-A4. Для частиц, которые большей частью являются треугольными, такими как третья частица 200c, дополнительные угловые измерения могут быть получены в плоскости, перпендикулярной основанию треугольной частицы 200c.
Два дополнительных измерения угловых размеров могут быть определены на основании фокальных плоскостей устройств обработки изображений 102 и обнаруженной, на основании контраста, потери четкости на границах частиц 200a-c. С несколькими устройствами 102 обработки изображений, сконфигурированных в разных фокальных плоскостях, можно определить изменение четкости в зависимости от толщины. Простая линейная функция или другая математическая функция для создания линии может быть установлена для расчета изменения четкости. При изменении расчета изменения четкости, может быть установлена вторая линия. Можно предположить, что две линии находятся в одной плоскости, и между двумя установленными линиями может быть определен угол.
Снова ссылаясь на Фиг. 1, система 108 сбора данных может дополнительно содержать нейронную сеть 134, которая может быть запрограммирована в запоминающем устройстве 118. Нейронная сеть 134 может использоваться, чтобы помочь процессору 104 распознавать расстояния V1, H1, H2, Z1, Z2 и углы A1-A4 при определении формы, размера и объема частиц 200a-c. В частности, нейронная сеть 134 может быть обучена до ввода в действие с использованием одного или нескольких комплектов или наборов физических объектов известной формы, размера и объема. Такие физические объекты могут быть предоставлены из множества источников для предоставления набора данных обучения для нейронной сети 134. Например, в некоторых вариантах реализации изобретения физические объекты могут содержать обычные физические объекты, такие как шариковые подшипники, кубы, пирамиды и т. д., или любые трехмерные объекты известной или определяемой формы, размера и объема.
В других вариантах реализации изобретения физические объекты, используемые при обучении нейронной сети 134, могут содержать буровые шламы, полученные из бурящейся в настоящий момент скважины. Например, полученный из текущей скважины буровой шлам можно отбирать, очищать и анализировать с использованием автономной системы анализа, которая помогает в калибровке системы 108 сбора данных. Затем известные данные изображения могут быть загружены обратно в программное обеспечение для обучения нейронной сети. В других вариантах реализации изобретения физические объекты, используемые при обучении нейронной сети 134, могут содержать буровые шламы, полученные из расположенной рядом скважины (например, периферийной скважины, бокового ствола скважины, обходной скважины и т.д.), поскольку геология расположенных рядом скважин должна быть в значительной степени подобной (предполагается использование одного и того же типа и размера буровых долот для получения бурового шлама). В таких случаях образцы бурового шлама, полученные из расположенной рядом скважины, могут быть очищены, взвешены и отсканированы для определения формы, размера и объема содержащихся в них частиц. Затем буровой шлам может проходить через систему 100 обработки изображений для корреляции известных теперь характеристик частиц (то есть формы, размера и объема) с измерениями, полученными системой 100 обработки изображений. Полученные данные могут быть сохранены в базе данных 120 для дальнейшего использования нейронной сетью 134 при последующем контроле бурового шлама 114 в реальном времени.
Когда несколько скважин пробурены в одном и том же поле и/или на одной и той же буровой установке, база данных 120 может быть наполнена наборами учебных данных, соответствующих известным характеристикам образцов буровых шламов, полученного из каждой скважины. Различные параметры бурения также могут быть сохранены в базе данных 120 и связаны с каждым набором учебных данных. Например, параметры бурения, такие как конфигурация используемого забойного устройства, тип бурового раствора, усилие-на-долото и истинная вертикальная глубина, могут храниться в базе данных 120 для каждого набора учебных данных. В реальном времени нейронная сеть 134 может запрашивать базу данных 120 при контроле бурового шлама 114, полученного из скважины при аналогичных параметрах бурения, сравнивая с хранимыми наборами учебных данных. Как будет понятно, это может оказаться полезным для мониторинга новых скважин, где база данных 120 может использоваться для подбора аналогичного забойного оборудования, типов буровых растворов, усилия-на-долото и истинной вертикальной глубине и, тем самым, обеспечить исходный набор обучения без предварительных данных от фактического пробуренной скважины.
В некоторых вариантах реализации изобретения система 100 обработки изображений может дополнительно быть выполнена с возможностью мониторинга и иным способом обнаружения наличия металлической стружки или частиц в буровых шламах 114. Металлическая стружка может быть дифференцирована и иным образом выделена из частиц 200a-c в буровом шламе 114 из-за высокого отношения V1 к H1. Например, металлическая стружка может показывать отношение V1/H1 более чем 1000. Металлическая стружка может возникать от разных источников. В некоторых случаях, например, металлическая стружка может образовываться при фрезеровании или иным способом бурения через стенку обсадной колонны или предварительно выфрезерованного окна для создания выхода обсадной колонны для многозабойной скважины. Плотность металлическая стружки, обнаруженной устройством 100 обработки изображений, может информировать оператора о том, что фреза полностью прошла стенку обсадной колонны и тем самым указывать, что выход из обсадной колонны завершен. Например, шламы от операций фрезерования обычно содержат длинную металлическую стружку, сходную со стружкой, которую часто наблюдают в механическом цеху. Если во время фрезерования не образуются длинные стружки, а вместо этого присутствуют мелкие стружки, это может быть признаком того, что отсутствует прогресс, и могут потребоваться действия на поверхности (т.е. увеличение усилия на фрезу, определение и/или регулировка крутящего момента на фрезе, извлечение фрезы из отверстия, замена фрезы и т.д.). Соответственно, металлическая стружка может контролироваться, чтобы обеспечить надлежащую очистку отверстий и определить, эффективно ли работает фреза, используемая для прорезания стенки обсадной колонны.
Но в других случаях металлическая стружка может быть признаком того, что обсадная колонна, которая образует ствол скважины, непреднамеренно зазубрена или надрезана во время работы фрезы или бурового долота в скважине. На основании известной скорости потока бурового раствора, циркулирующего через ствол скважины, оператор может определить приблизительное местоположение в стволе скважины, где возникла металлическая стружка. В таких случаях контрольный инструмент (т.е., скважинный зонд для каротажа) может устанавливаться в ствол скважины, чтобы проверить область, в которой возникла металлическая стружка, и установить необходимость ремонта обсадной колонны.
В некоторых вариантах реализации изобретения система 108 сбора данных может дополнительно быть выполнена с возможностью определения массы бурового шлама 114 (Фиг. 1). Это может достигаться путем определения объемного расхода обнаруженных буровых шламов 114 и плотности буровых шламов 114. Объемный расход буровых шламов 114 можно определить с помощью расходомеров или других известных устройств измерения потока. В некоторых случаях плотность буровых шламов 114 может быть определена путем получения информации о плотности от инструментов измерения во время бурения (ИВБ) или каротажа во время бурения (КВБ), используемых в операции бурения. В таких случаях датчики плотности ИВБ или КВБ, такие нейтронные датчики плотности, которые определяют объемную плотность шламов пласта, могут анализировать пробиваемый пласт и передавать данные плотности объемного пласта в систему сбора данных 108 для обработки данных. Однако, в других случаях, плотность бурового шлама 114 может быть определена путем извлечения образца бурового шлама 114 и определения его массы взвешиванием образца и, при этом, определения объема. Затем измеренный объемный расход буровых шламов 114 можно умножить на измеренную плотность, в результате чего получим массовый расход буровых шламов 114.
Затем обработанная информация, генерируемая системой 108 сбора данных (например, форма шлама, размер, объем и т.д.), может быть предоставлена оператору скважины через одно или несколько периферийных устройств 132, чтобы отображать в реальном времени или почти в реальном времени изменения в буровых шламах 114, которые возникают во время операций бурения. Как будет понятно, определение изменений размера частиц и распределения бурового шлама 114 может оказаться полезным при определении рабочих условий, которые могут быть связаны с этими типами изменений и вероятными условиями. Затем эти условия могут использоваться для осуществления интеллектуального управления операциями бурения, такого как регулировка усилия-на-долото, регулировка эквивалентной циркуляционной плотности бурового раствора, добавление присадок к буровому раствору или вообще прекращение операций бурения.
По-прежнему ссылаясь на Фиг. 1, в соответствии с дополнительными вариантами реализации настоящего изобретения, точность системы 100 обработки изображений может быть оценена и иным образом установлена, чтобы продемонстрировать оператору скважины, что система 100 обработки изображений или любое другое устройство обработки изображения или сканирования, используемое для определения формы, объема и распределения по размерам бурового шлама 114, работает в соответствии с проектом. Более конкретно, совместно с нейронной сетью 134 может использоваться система или программа проверки. В некоторых вариантах реализации изобретения система проверки может содержать, по меньшей мере частично, программное обеспечение, хранящееся в запоминающем устройстве 118 системы 108 сбора данных, и запрограммированное с инструкциями, выполнение которых процессором (процессорами) 104 осуществляет требуемые этапы проверки. В других вариантах реализации изобретения программа проверки может содержать любую другую систему, которая может быть запрограммирована для проверки по меньшей мере двух различных типов измеренных характеристик бурового шлама 114: объема и распределения частиц по размерам. Каждый тип проверки измерений обсуждается ниже.
Для проверки измерения объема в систему проверки (например, систему 108 сбора данных) может быть предоставлен первый комплект физических объектов известного объема. Первый комплект может содержать множество трехмерных объектов, имеющих размеры, которые находятся в пределах диапазона сканирования системы 100 обработки изображений. Например, эти объекты могут включать приобретенные предметы известного объема, такие как объекты, которые были изготовлены с использованием высокоточного известного объема, или объекты, для которых их объем можно легко вычислить, например, шарики, кубы, пирамиды и т.д. В других случаях эти объекты могут иметь известный объем, который ранее измерен или определялся с помощью таких средств, как объем бурового раствора, подаваемого за один ход поршня, или другое средство сканирования с более высокой точностью (например, координатная измерительная машина). При работе эти физические объекты могут быть измерены или сканированы системой 100 обработки изображений, чтобы определить, находится ли измеренный объем объектов близко к известному объему объектов и, следовательно, работает ли система 100 обработки изображений в пределах заданного порога точности. В некоторых вариантах реализации изобретения общий вес первого комплекта физических объектов может использоваться для проверки наличия всех объектов первого комплекта.
В процессе проверки результатов измерения объема система 100 обработки изображений может использовать два устройства 102 обработки изображений, каждое с соответствующими фокальными плоскостями, как описано выше, и может быть выполнена с возможностью определения толщины физических объектов на основании обнаруженного или измеренного искажения (то есть отсутствия четкости) зафиксированных изображений. Как обсуждалось выше, измеренное искажение, которое может представляться в виде процента, может быть связано с измеряемым объемом физических объектов. Соответственно, объекты известного объема и размера контролируются системой 100 обработки изображений, и полученные результаты измерений сравниваются с известными параметрами и измерениями объектов, чтобы определить, работает ли система 100 обработки изображений правильно или в пределах порога точности. Если система 100 обработки изображений выходит за пределы порога точности, тогда, если это необходимо, система 100 обработки изображений может быть повторно откалибрована, что может включать повторное обучение нейронной сети 134 новыми наборами данных обучения, как обсуждалось выше.
Для проверки распределения по размеру в систему проверки (например, систему 108 сбора данных) может быть предоставлен второй комплект физических объектов. В некоторых вариантах реализации изобретения первый и второй комплекты физических объектов могут быть одинаковыми. Тем не менее, в других вариантах реализации изобретения первый и второй комплекты физических объектов могут отличаться. Снова, объекты во втором комплекте могут быть коммерчески доступными объектами с известным распределением по размерам и соотношением сторон или специально изготовленными изделиями с известным диапазоном распределения размеров и соотношениями сторон. В некоторых случаях объекты второго комплекта могут иметь одинаковую геометрию, но разные размеры, или, альтернативно, быть разных геометрий и разных размеров. Как будет понятно, размеры используемых объектов будут, как правило, в пределах спецификации размера частиц системы 100 обработки изображений.
Объекты различного размера из второго комплекта могут быть смешаны в известном соотношении (то есть распределении по размеру) и пропущены через систему 100 обработки изображений для обнаружения. Затем известное соотношение можно сравнить с измеренным и рассчитанным распределением по размеру, представленным системой 100 обработки изображений, чтобы определить, считывает ли система 100 обработки изображений в пределах указанного допуска и иным способом в пределах заранее заданного порога точности системы 100 обработки изображений. Как и в случае с первым комплектом физических объектов, общий вес второго набора может использоваться для проверки наличия всех предметов третьего комплекта.
В некоторых вариантах реализации изобретения любой из объектов в первом и/или втором комплектах физических объектов может дополнительно изменяться в плане отражения и гладкости поверхности. В результате такие объекты могут использоваться для проверки того, влияют ли эти параметры на результаты сканирования системы 100 обработки изображений. Это может оказаться полезным при обучении системы 100 обработки изображений для различения металлических, кристаллических и матовых объектов, каждый из которых может влиять на коэффициент контрастности частиц 200a-c на основании того, как свет (то есть от источника 122 света) взаимодействует с внешними поверхностями частиц 200a-c. Нейронную сеть 134 можно обучить принимать наиболее эффективный коэффициент контрастности в зависимости от того, какой тип частицы 200a-c обнаруживается. В некоторых случаях нейронная сеть 134 может быть обучена использованию лучшего источника 122 света для улучшения коэффициента контрастности. В таких случаях различные источники 122 света могут быть включены/выключены для улучшения коэффициента контрастности на основании условий освещения частиц и фона.
Соответственно, система проверки может быть выполнена с возможностью использования физических объектов известного размера и геометрии для проверки указанных пределов системы 100 обработки изображений. Этот тип системы может использоваться для проверки определения объема и распределения по размерам буровых шламов 114. Описанная в настоящее время система проверки использует известные входные данные и сравнивает их с измеренными и рассчитанными результатами системы 100 обработки изображений и тем самым обеспечивает непосредственные средства демонстрации того, работает ли система 100 обработки изображений так, как необходимо.
Ссылаясь теперь на Фиг. 4, проиллюстрированное представляет собой типовую буровую систему 400, которая может содержать систему 100 обработки изображений, в соответствии с одним или несколькими вариантами реализации изобретения. Следует отметить, что хотя Фиг. 1, как правило, иллюстрирует наземную буровую установки, специалисты, квалифицированные в уровне техники легко поймут, что принципы, описанные здесь, в равной степени применимы к подводным операциям бурения, которые используют плавучие или морские платформы и буровые установки, не отступая от объема изобретения. Как проиллюстрировано, система бурения 400 может содержать буровую платформу 402, которая поддерживает вышку 404, имеющую передвижной блок 406 для подъема и опускания бурильной колонны 408. Бурильная колонна 408 может содержать, не ограничиваясь перечисленным, бурильную трубу и безмуфтовую длинномерную трубу, широко известные специалистам, квалифицированным в уровне техники. Ведущая буровая труба 410 поддерживает бурильную колонну 408, когда она опускается через стол 412 ротора. Буровое долото 414 прикреплено к дистальному концу бурильной колонны 408 и приводится в действие либо скважинным двигателем, и/или посредством вращения бурильной колонны 408 с поверхности скважины. Когда долото 414 вращается, оно формирует скважину 416, которая проникает в различные подземные пласты 418.
Насос 420 (например, насос бурового глинистого раствора) прокачивает буровой раствор 422 через подающую трубу 424 и к ведущей буровой трубе 410, которая передает буровой раствор 422 в скважину через внутреннюю часть бурильной колонны 408 и через одно или несколько отверстий в буровом долоте 414. Затем буровой раствор 422 прокачивается обратно к поверхности через межтрубное пространство 426, находящееся между бурильной колонной 408 и стенками скважины 416. На поверхности прокачанный или отработанный буровой раствор 422 выходит из межтрубного пространства 426 и может транспортироваться в один или более блок(и) 428 обработки раствора через соединительную линию 430 потока. После прохождения через блок(и) 428 обработки раствора «очищенный» буровой раствор 422 отстаивается в расположенном рядом сточном баке 432 (т.е., баке бурового глинистого раствора). Один или несколько химикатов, флюидов или присадок могут быть добавлены к буровому раствору 422 через смесительный бункер 434, сообщающийся с или иным образом гидравлически связанный со сточным баком 432.
Блок(и) 428 обработки флюида может содержать и иным образом быть подобным виброситу (виброситам) 116 (Фиг. 1). Как проиллюстрировано, система 100 обработки изображений может быть соединена с возможностью передачи информации с и иным образом содержать блок(и) 428 обработки флюида, где, как описано выше, устройство 102 обработки изображений (Фиг. 1) может захватывать изображения буровых шламов 114 (Фиг. 1), возвращающихся в буровом растворе 422, и передавать данные 112 изображения (фиг. 1) системе 108 сбора данных (Фиг. 1) для обработки данных.
Как используется в данном документе, машиночитаемый носитель будет ссылаться на любой носитель, который прямо или косвенно предоставляет инструкции процессору (процессорам) 104 для выполнения. Машиночитаемый носитель может принимать множество форм, включая, например, долговременные носители данных, кратковременные носители данных и средства передачи данных. Долговременные носители данных могут включать, например, оптические и магнитные диски. Кратковременные носители данных могут включать, например, динамическое запоминающее устройство. Средства передачи данных могут включать, например, коаксиальные кабели, провод, волоконную оптику и провода, которые образуют шину. Обычные формы машиночитаемых носителей данных могут включать в себя, например, гибкие диски, гибкие диски, жесткие диски, магнитные ленты, другие подобные магнитные носители, CD-диски, DVD-диски, другие подобные оптические носители, перфокарты, бумажные ленты и подобные физические носители c отверстиями c рисунком, ОЗУ (RAM), ПЗУ (ROM), программируемое ПЗУ (PROM), стираемое программируемое ПЗУ (EPROM) и флеш EPROM.
Варианты реализации изобретения, описанного в данном документе, включают:
А. Способ, который включает получение изображения буровых шламов системой сбора данных, которая включает один или несколько процессоров, при этом буровые шламы образуются из ствола бурящейся скважины и включают множество частиц, анализ изображения буровых шламов одним или несколькими процессорами путем получения трех результатов измерений двумерного расстояния для каждой частицы и получения четырех результатов измерений угловых размеров для каждый частицы, и определение одним или несколькими процессорами по меньшей мере одного из: распределение частиц буровых шламов по размеру и распределение буровых шламов по форме, на основании трех результатов измерений двумерного расстояния и четырех результатов измерений угловых размеров каждой частицы.
B. Долговременный машиночитаемый носитель данных запрограммированный исполняемыми компьютером командами так, что при выполнении их процессором компьютерного блока реализуют способ получения изображения буровых шламов системой сбора данных, которая включает один или несколько процессоров, при этом буровые шламы образуются из ствола бурящейся скважины и включают множество взвешенных частиц, анализ изображения буровых шламов одним или несколькими процессорами путем получения трех результатов измерений двумерного расстояния для каждой частицы и получения четырех результатов измерений угловых размеров для каждый частицы, и определение одним или несколькими процессорами по меньшей мере одного из: распределение частиц буровых шламов по размеру и распределение буровых шламов по форме, на основании трех результатов измерений двумерного расстояния и четырех результатов измерений угловых размеров каждой частицы.
Каждый из вариантов реализации изобретения А и В может иметь один или несколько следующих дополнительных элементов в любой комбинации: Элемент 1: в котором получению изображения буровых шламов системой сбора данных предшествует подача буровых шламов через сетку вибросита на вибросите, захват изображения буровых шламов на сетке или после сетки вибросита одним или несколькими устройствами обработки изображений, тем самым генерируя данные изображения и передача данных изображения в систему сбора данных. Элемент 2: дополнительно включающий в себя освещение буровых шламов на сетке или после сетки вибросита источником света, который излучает известную длину волны электромагнитного излучения, причем источник света выбран из группы, состоящей из источника белого света, источника света лампы накаливания, инфракрасного источника света, лазера, одного или нескольких светоизлучающих диодов и любой их комбинации. Элемент 3: в котором источник света содержит множество источников света, причем способ дополнительно включает в себя переключение между множеством источников света и, тем самым, улучшение коэффициента контрастности для по меньшей мере части из множества частиц. Элемент 4: в котором получение трех результатов измерений двумерного расстояния для каждой частицы включает в себя идентификацию и измерение длины для каждой частицы, идентификацию и измерение ширины для каждой частицы, причем измерение ширины делит пополам длину и является ортогональным к ней, а также идентификацию и измерение промежуточной ширины для каждой частицы, когда измерение промежуточной ширины проводится в средней точке между пересечением между длиной и шириной и является ортогональным к длине. Элемент 5: дополнительно содержащий сравнение результатов измерений длины, ширины и промежуточной ширины для данной частицы, чтобы определить, является ли данная частица квадратной, круглой или треугольной формы. Элемент 6: дополнительно содержащий усредняющие измерения длины, ширины и промежуточной ширины для каждой частицы для определения статистического распределения по размеру множества частиц в буровых шламах. Элемент 7: в котором данная частица идентифицируется из множества частиц как частица квадратной формы, если каждый из четырех результатов измерений угловых размеров находится в диапазоне от около 70° до около 110°. Элемент 8: в котором данная частица идентифицируется из множества частиц как частица круглой формы, если каждый из четырех результатов измерений угловых размеров превышает 90°. Элемент 9: в котором четыре результата измерения угловых размеров содержат первый угол, второй угол, третий угол и четвертый угол и в котором данная частица идентифицируется из множества частиц как частица треугольной формы, если четвертый угол равен нулю, а сумма первого, второго и третьего углов составляет около 180°. Элемент 10: дополнительно содержащий классификацию каждой частицы одним или несколькими процессорами как одной из квадратной, круглой и треугольной, на основании трех результатов измерений двумерного расстояния и четырех результатов измерений угловых размеров. Элемент 11: дополнительно содержит захват изображений каждой частицы с по меньшей мере первым устройством обработки изображения и вторым устройством обработки изображений, причем первое устройство обработки изображений захватывает изображения в первой фокальной плоскости, а второе устройство обработки изображений захватывает изображения во второй фокальной плоскости, которая отличается от первой фокальной плоскости; анализ изображений каждой частицы первого и второго устройств обработки изображения одним или несколькими процессорами и получение первого результата измерения толщины, связанного с первым устройством обработки изображений, и второго результата измерения толщины, связанное со вторым устройством обработки изображений для каждой частицы; и определение одним или несколькими процессорами трехмерной формы каждой частицы на основании трех результатов измерений двумерного расстояния, четырех результатов измерений угловых размеров и первого и второго результатов измерений толщины, причем трехмерная форма выбирается из группы, состоящей из куба, сферы и пирамиды. Элемент 12: в котором система сбора данных дополнительно содержит нейронную сеть, которая включает в себя наборы данных обучения, основанные на одном или более наборах физических объектов известной формы, размера и объема, и где определение одним или несколькими процессорами по меньшей мере одного из распределения частиц по размерам и распределения по форме бурового шлама дополнительно включает в себя обучение нейронной сети одним или несколькими наборами физических объектов для генерирования наборов обучающих данных, и опрашивание нейронной сети одним или несколькими процессорами для корреляции известной формы, размера и объема наборов данных обучения для результатов измерений, полученных одним или несколькими процессорами. Элемент 13: дополнительно включающий определение объемного расхода буровых шламов, определение плотности буровых шламов и умножение объемного расхода буровых шламов на плотность буровых шламов и, таким образом, получение массового расхода буровых шламов. Элемент 14: дополнительно содержащий отображение по меньшей мере одного из распределения частиц бурового шлама по размерам и распределение бурового шлама по форме на одном или нескольких периферийных устройствах, соединенных с возможностью передачи информации с системой сбора данных. Элемент 15: в котором система сбора данных образует часть системы обработки изображений, которая включает в себя одно или несколько устройств обработки изображений, которые получают изображение бурового шлама, причем способ дополнительно включает выборку комплекта физических объектов известного объема одним или несколькими устройствами обработки изображений и тем самым получение измеренных объемов с помощью системы сбора данных, проведение выборки из комплекта физических объектов известного распределения по размеру одним или несколькими устройствами обработки изображений и тем самым получение измеренного распределение по размеру системой сбора данных, и определение, работает ли система обработки изображений в пределах предопределенного порога точности путем сравнения по меньшей мере одного из измеренного объема с известным объемом и измеренного распределения по размеру с известным распределением по размеру. Элемент 16: дополнительно включающий повторную калибровку системы обработки изображений, когда определено, что система обработки изображений работает без предопределенного порога точности.
Элемент 17: в котором получение трех результатов измерений двумерного расстояния для каждой частицы включает в себя идентификацию и измерение длины для каждой частицы, идентификацию и измерение ширины для каждой частицы, причем измерение ширины делит пополам длину и является ортогональным по отношению к ней, а также идентификацию и измерение промежуточной ширины для каждой частицы, причем измерение промежуточной ширины проводится в средней точке между пересечением между длиной и шириной и является ортогональным по отношению к длине. Элемент 18: дополнительно содержащий сравнение измерений длины, ширины и промежуточной ширины для данной частицы, чтобы определить, является ли данная частица квадратной, круглой или треугольной формы. Элемент 19: дополнительно содержащий усредняющие измерения длины, ширины и промежуточной ширины для каждой частицы для определения статистического распределения по размеру множества частиц в буровых шламах. Элемент 20: дополнительно содержащий классификацию каждой частицы одним или несколькими процессорами как одной из квадратной, круглой и треугольной, на основании трех результатов измерений двумерного расстояния и четырех результатов измерений угловых размеров. Элемент 21: дополнительно содержит захват изображений каждой частицы с по меньшей мере первым устройством обработки изображений и вторым устройством обработки изображений, причем первое устройство обработки изображений захватывает изображения в первой фокальной плоскости, а второе устройство обработки изображений захватывает изображения во второй фокальной плоскости, которая отличается от первой фокальной плоскости; анализ изображений каждой частицы первого и второго устройств обработки изображений одним или несколькими процессорами и получение первого результата измерения толщины, связанного с первым устройством обработки изображений, и второго результата измерения толщины, связанного со вторым устройством обработки изображений для каждой частицы; и определение одним или несколькими процессорами трехмерной формы каждой частицы на основании трех результатов измерений двумерного расстояния, четырех результатов измерений угловых размеров и первого и второго результатов измерений толщины, причем трехмерная форма выбирается из группы, состоящей из куба, сферы и пирамиды. Элемент 22: в котором система сбора данных дополнительно содержит нейронную сеть, которая включает в себя наборы учебных данных, основанные на одном или более наборах физических объектов известной формы, размера и объема, и где определение одним или несколькими процессорами по меньшей мере одного из распределения частиц по размерам и распределения по форме бурового шлама дополнительно включает в себя обучение нейронной сети одним или несколькими наборами физических объектов для генерирования наборов обучающих данных, и опрашивание нейронной сети одним или несколькими процессорами для корреляции известной формы, размера и объема наборов учебных данных для результатов измерений, полученных одним или несколькими процессорами. Элемент 23: дополнительно включающий определение объемного расхода буровых шламов, определение плотности буровых шламов и умножение объемного расхода буровых шламов на плотность буровых шламов и, таким образом, получение массового расхода буровых шламов.
В качестве неограничивающего примера типовые комбинации, применимые к A и B, включают: элемент 1 с элементом 2; элемент 1 с элементом 3; элемент 4 с элементом 5; элемент 4 с элементом 6; элемент 15 с элементом 16; элемент 17 с элементом 18 и элемент 17 с элементом 19.
Поэтому описанные системы и способы хорошо адаптированы для достижения упомянутых целей и преимуществ, а также того, что им присуще. Конкретные варианты реализации изобретения, раскрытые выше, являются лишь иллюстративными, поскольку идеи настоящего изобретения могут быть модифицированы и воплощены различными, но эквивалентными способами, очевидными для специалистов, квалифицированных в уровне техники, имеющих преимущества в соответствии с идеями настоящего изобретения. Кроме того, не предусматривается никаких ограничений для элементов конструкции или конструкции, проиллюстрированных в данном документе, кроме как описано ниже в формуле изобретения. Поэтому очевидно, что конкретные иллюстративные варианты реализации изобретения, описанные выше, могут быть изменены, объединены или модифицированы, и все такие изменения рассматриваются в рамках объема настоящего раскрытия изобретения. Системы и способы, иллюстративно описанные в данном документе, соответствующим образом могут быть использованы при отсутствии любого элемента, что конкретно не описано здесь и/или любого необязательного элемента, описанного в данном документе. Хотя композиции и способы описаны в терминах «содержащих», «состоящие» или «включающие» различные компоненты или этапы, композиции и способы также могут «состоять по существу из» или «состоять из» различных компонентов и этапов. Все числа и диапазоны, описанные выше, могут изменяться на некоторую величину. Всякий раз, когда указывается числовой диапазон с нижним пределом и верхним пределом, любое число и любой включенный диапазон, попадающий в пределы диапазона, указывается конкретно. В частности, каждый диапазон значений (в виде «от около а до около b», или, равносильно, «от примерно а до примерно b», или, равносильно, «от примерно a-b»), описанный в данном документе, следует понимать как определяющий каждое число и диапазон, входящие в широкий диапазон значений. Кроме того, термины в формуле изобретения имеют свое простое, обычное значение, если иное явно и четко не определено патентообладателем. Если в этом описании есть какой-либо конфликт в использовании слова или термина и одного или нескольких патентных или других документов, которые могут быть включены в данный документ посредством ссылки, должны быть приняты определения, которые согласуются с этим описанием изобретения.
В контексте настоящего изобретения, выражение «по меньшей мере один из», предшествующее последовательности наименований, со словами «и» или «или» для отделения любого из этих наименований, изменяет перечисление в целом, а не каждый элемент перечисления (т.е., каждое наименование). Выражение «по меньшей мере один из» допускает значение, включающее по меньшей мере одно из любого одного из наименований и/или по меньшей мере одно из любой комбинации наименований и/или по меньшей мере одно из каждого из наименований. Для примера: каждое из выражений «по меньшей мере один из A, B и C» или «по меньшей мере один из A, B или C» относится только к A, только к B или только к C; к любой комбинации A, B и C; и/или по меньшей мере к одному из A, B и C.
Изобретение относится к операциям бурения ствола скважины, а конкретнее к мониторингу скважинных шламов в возвращающихся буровых растворах, определению размера и распределению по форме частиц, присутствующих в скважинных шламах. Техническим результатом является повышение производительности и эффективности буровых работ. Способ включает получение изображения буровых шламов системой сбора данных, которая содержит один или несколько процессоров. При этом буровые шламы образуются в стволе бурящейся скважины и включают множество частиц, анализ изображения буровых шламов одним или несколькими процессорами путем получения трех результатов измерений двумерных расстояний для каждой частицы и получения четырех результатов измерений угловых размеров для каждой частицы и определение одним или несколькими процессорами по меньшей мере одного из: распределение частиц буровых шламов по размеру и распределение буровых шламов по форме на основании трех результатов измерений двумерного расстояния и четырех измерений результатов угловых размеров каждой частицы. 2 н. и 23 з.п. ф-лы, 4 ил.
1. Способ определения распределения частиц буровых шламов по размеру и/или форме, включающий:
получение изображения буровых шламов системой сбора данных, которая содержит один или несколько процессоров, при этом буровые шламы образуются в стволе бурящейся скважины и включают множество частиц;
анализ изображения буровых шламов одним или несколькими процессорами путем получения трех результатов измерений двумерных расстояний для каждой частицы и получения четырех результатов измерений угловых размеров для каждой частицы и
определение одним или несколькими процессорами по меньшей мере одного из: распределение частиц буровых шламов по размеру и распределение буровых шламов по форме на основании трех результатов измерений двумерного расстояния и четырех измерений результатов угловых размеров каждой частицы.
2. Способ по п. 1, отличающийся тем, что получению изображения буровых шламов системой сбора данных предшествует:
подача буровых шламов через сетку вибросита на вибросите;
захват изображения буровых шламов на сетке или после сетки вибросита одним или несколькими устройствами обработки изображений, таким образом генерируя данные изображения; и
передача данных изображения в систему сбора данных.
3. Способ по п. 2, дополнительно включающий освещение буровых шламов на сетке или после сетки вибросита источником света, который излучает известную длину волны электромагнитного излучения, причем источник света выбран из группы, состоящей из источника белого света, источника света лампы накаливания, инфракрасного источника света, лазера, одного или нескольких светоизлучающих диодов и любой их комбинации.
4. Способ по п. 2, отличающийся тем, что источник света содержит множество источников света, причем способ дополнительно включает переключение между множеством источников света и, тем самым, улучшение коэффициента контрастности для по меньшей мере части из множества частиц.
5. Способ по п. 1, отличающийся тем, что получение трех результатов измерений двумерного расстояния для каждой частицы включает:
идентификацию и измерение длины для каждой частицы;
идентификацию и измерение ширины для каждой частицы, при этом результат измерения ширины делит пополам длину и является ортогональным к ней; и
идентификацию и измерение промежуточной ширины для каждой частицы, при этом результат измерения промежуточной ширины получен в средней точке между пересечением длины и ширины и является ортогональным к длине.
6. Способ по п. 5, дополнительно содержащий сравнение измерений длины, ширины и промежуточной ширины для данной частицы, чтобы определить, является ли данная частица квадратной, круглой или треугольной формы.
7. Способ по п. 5, дополнительно содержащий усредняющие результаты измерения длины, ширины и промежуточной ширины для каждой частицы для определения статистического распределения по размеру множества частиц в буровых шламах.
8. Способ по п. 1, отличающийся тем, что данная частица идентифицируется из множества частиц как частица квадратной формы, если каждое из четырех результатов измерений угловых размеров находится в диапазоне от около 70° до около 110°.
9. Способ по п. 1, отличающийся тем, что данная частица идентифицируется из множества частиц как частица круглой формы, если каждое из четырех измерений угловых размеров больше чем 90°.
10. Способ по п. 1, отличающийся тем, что четыре результата измерения угловых размеров содержат первый угол, второй угол, третий угол и четвертый угол и в котором данная частица идентифицируется из множества частиц как частица треугольной формы, если четвертый угол равен нулю, а сумма первого, второго и третьего углов составляет около 180°.
11. Способ по п. 1, дополнительно включающий классификацию каждой частицы одним или несколькими процессорами как одной из: квадратной, круглой и треугольной, на основании трех результатов измерений двумерного расстояния и четырех результатов измерений угловых размеров.
12. Способ по п. 1, дополнительно включающий:
захват изображений каждой частицы по меньшей мере первым устройством обработки изображений и вторым устройством обработки изображений, при этом первое устройство обработки изображений захватывает изображения в первой фокальной плоскости, а второе устройство обработки изображений захватывает изображения во второй фокальной плоскости, которая не совпадает с первой фокальной плоскостью;
анализ изображений каждой частицы от первого и второго устройств обработки изображений одним или несколькими процессорами и получение для каждой частицы первого результата измерения толщины, связанного с первым устройством обработки изображений, и второго результата измерения толщины, связанного со вторым устройством обработки изображений; и
определение одним или несколькими процессорами трехмерной формы каждой частицы на основании трех результатов измерений двумерного расстояния, четырех результатов измерений угловых размеров и первого и второго результатов измерения толщины,
при этом трехмерная форма выбирается из группы, состоящей из куба, сферы и пирамиды.
13. Способ по п. 1, отличающийся тем, что система сбора данных дополнительно содержит нейронную сеть, которая включает наборы учебных данных, основанные на одном или более наборах физических объектов известной формы, размера и объема, и при этом определение одним или несколькими процессорами по меньшей мере одного из: распределение частиц по размерам и распределение формы бурового шлама дополнительно содержит:
обучение нейронной сети одним или несколькими наборами физических объектов для создания наборов учебных данных; и
запрашивание нейронной сети одним или несколькими процессорами для корреляции известной формы, размера и объема наборов учебных данных с измерениями, полученными одним или несколькими процессорами.
14. Способ по п. 1, дополнительно включающий:
определение объемного расхода буровых шламов;
определение плотности буровых шламов и
умножение объемного расхода буровых шламов на плотность буровых шламов и, таким образом, получение массового расхода буровых шламов.
15. Способ по п. 1, дополнительно включающий отображение по меньшей мере одного из: распределение частиц бурового шлама по размерам и распределение бурового шлама по форме на одном или нескольких периферийных устройствах, соединенных с возможностью передачи информации с системой сбора данных.
16. Способ по п. 1, отличающийся тем, что система сбора данных является частью системы обработки изображений, которая включает одно или несколько устройств обработки изображений, которые получают изображение бурового шлама, причем способ дополнительно включает:
генерация выборки из комплекта физических объектов с известным объемом одним или несколькими устройствами обработки изображений и, таким образом, получение системой сбора данных измеренных объемов;
генерация выборки из комплекта физических объектов с известным распределением по размеру одним или несколькими устройствами обработки изображения и, таким образом, получение системой сбора данных измеренного распределения по размеру; и
определение, работает ли система обработки изображений в пределах заданного порога точности путем сравнения по меньшей мере одного из: измеренных объемов с известным объемом и измеренных распределений по размеру с известным распределением по размеру.
17. Способ по п. 16, дополнительно включающий повторную калибровку системы обработки изображений, когда определено, что система обработки изображений работает без предопределенного порога точности.
18. Энергонезависимый машиночитаемый носитель данных, запрограммированный исполняемыми компьютером командами, которые при исполнении их процессором компьютерного блока выполняют способ:
получения изображения буровых шламов системой сбора данных, которая включает один или несколько процессоров, при этом буровые шламы образуются в стволе бурящейся скважины и включают множество частиц, находящихся во взвешенном состоянии;
анализа изображения буровых шламов одним или несколькими процессорами путем получения трех результатов измерений двумерных расстояний для каждой частицы и получения четырех результатов измерений угловых размеров для каждой частицы; и
определение одним или несколькими процессорами по меньшей мере одного из: распределение частиц буровых шламов по размеру и распределение буровых шламов по форме, на основании трех результатов измерений двумерного расстояния и четырех результатов измерений угловых размеров каждой частицы.
19. Энергонезависимый машиночитаемый носитель данных по п. 18, при этом получение трех результатов измерений двумерного расстояния для каждой частицы включает:
идентификацию и измерение длины для каждой частицы;
идентификацию и измерение ширины для каждой частицы, при этом результат измерения ширины делит пополам длину и является ортогональным к ней; и
идентификацию и измерение промежуточной ширины для каждой частицы, при этом результат измерения промежуточной ширины получен в средней точке между пересечением длины и ширины и является ортогональным к длине.
20. Энергонезависимый машиночитаемый носитель данных по п. 19, дополнительно содержащий сравнение результатов измерений длины, ширины и промежуточной ширины для данной частицы, чтобы определить, является ли данная частица квадратной, круглой или треугольной формы.
21. Энергонезависимый машиночитаемый носитель данных по п. 19, дополнительно содержащий усредняющие результаты измерения длины, ширины и промежуточной ширины для каждой частицы для определения статистического распределения по размеру множества частиц в буровых шламах.
22. Энергонезависимый машиночитаемый носитель данных по п. 18, дополнительно содержащий классификацию каждой частицы одним или несколькими процессорами как одной из: квадратной, круглой и треугольной, на основании трех результатов измерений двумерного расстояния и четырех результатов измерений угловых размеров.
23. Энергонезависимый машиночитаемый носитель данных по п. 18, дополнительно содержащий:
захват изображений каждой частицы по меньшей мере первым устройством обработки изображений и вторым устройством обработки изображений, при этом первое устройство обработки изображений захватывает изображения в первой фокальной плоскости, а второе устройство обработки изображений захватывает изображения во второй фокальной плоскости, которая не совпадает с первой фокальной плоскостью;
анализ изображений каждой частицы от первого и второго устройств обработки изображений одним или несколькими процессорами и получение для каждой частицы первого измерения толщины, связанного с первым устройством обработки изображения, и второго измерения толщины, связанного со вторым устройством обработки изображения; и
определение одним или несколькими процессорами трехмерной формы каждой частицы, на основании трех результатов измерения двумерного расстояния, четырех результатов измерениях угловых размеров, и первого и второго измерения толщины,
при этом трехмерная форма выбирается из группы, состоящей из куба, сферы и пирамиды.
24. Энергонезависимый носитель данных по п. 18, при этом система сбора данных дополнительно содержит нейронную сеть, которая включает в себя наборы учебных данных, основанные на одном или более наборах физических объектов известной формы, размера и объема, и при этом определение одним или несколькими процессорами по меньшей мере одного из: распределение частиц по размерам и распределение формы бурового шлама дополнительно содержит:
обучение нейронной сети одним или несколькими наборами физических объектов для создания наборов учебных данных и
запрашивание нейронной сети одним или несколькими процессорами для корреляции известной формы, размера и объема наборов учебных данных с измерениями, полученными одним или несколькими процессорами.
25. Энергонезависимый машиночитаемый носитель данных по п. 18, дополнительно содержащий:
определение объемного расхода буровых шламов;
определение плотности буровых шламов и
умножение объемного расхода буровых шламов на плотность буровых шламов и, таким образом, получение массового расхода буровых шламов.
| US 20100258304 A1, 14.10.2010 | |||
| РАЗБИЕНИЕ ОБРАЗЦА НА ОПТИЧЕСКИЕ СРЕЗЫ И РЕГИСТРАЦИЯ ЧАСТИЦ В ОБРАЗЦЕ | 2009 |
|
RU2524051C2 |
| US 20140046628 A1, 13.02.2014 | |||
| US 20080192987 A1, 14.08.2008 | |||
| WO 2015002653 A1, 08.01.2015. | |||

