1. Область техники, к которой относится изобретение
[0001] Изобретение относится к транспортному средству, имеющему второй режим движения, в котором управление движущей силой и управление переключением передач автоматической коробки передач выполняются независимо от выполнения ускорения/замедления водителем, а также к способу управления транспортным средством.
2. Описание известного уровня техники
[0002] Известно устройство управления транспортным средством для транспортного средства, имеющее: источник движущей силы; а также автоматическую коробку передач, способную установить множество ступеней передачи, каждая из которых имеет свое передаточное число. Устройство управления транспортным средством может назначать: первый режим движения, в котором управление движущей силой и управление переключением передач автоматической коробки передач выполняются в соответствии с выполнением управления ускорением/замедлением водителем; и второй режим движения, в котором целевое состояние движения назначается независимо от выполнения управления ускорением/замедлением в состоянии, когда водитель присутствует в транспортном средстве, и в котором выполняется управление движущей силой и управление переключением передач. Устройство, описанное в публикации патентной заявки Японии №2001-334841 (JP 2001-334841 А), представляет собой один его пример. Движение посредством управления движением с постоянной скоростью соответствует второму режиму движения. Для предотвращения слишком частого переключения передач и колебаний регулировок в автоматической коробке передач во время движения посредством управления движением с постоянной скоростью был предложен способ обработки, имеющий целью замедление параметра (сигнала целевой движущей силы), используемого для управления переключением передач.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Однако, в случае, когда выполняется только процедура замедления изменения параметра, которая используется для управления переключением передач, как описано выше, возрастает период времени, в течение которого транспортное средство движется на ступени передачи, отличающейся от оптимальной ступени передачи, определяемой таблицей переключения передач и т.п. Таким образом, экономия топлива может снизиться. Кроме того, при предотвращении ухудшения качества движения (колебаний движущей силы, вибраций, шума и т.п.), вызванного частым переключением передач, между условием включения повышающей передачи и условием включения понижающей передачи возникает гистерезис при обычном управлении переключением передач с использованием таблицы переключения передач и т.п. Однако, поскольку известное устройство управления транспортным средством выполнено на основе выполнения водителем управления ускорением/замедлением, это устройство управления транспортным средством не всегда может подходить для второго режима движения при управлении движением с постоянной скоростью, в котором водитель не выполняет управление ускорением/замедлением и т.п. Таким образом, имеются возможности для совершенствования. Кроме того, ожидается, что более высокие характеристики с точки зрения качества движения и экономии топлива нужнее, чем эксплуатационные качества, такие как характеристики движущей силы, поскольку уменьшается вклад водителя в управление. Как и в случае, когда вклад водителя в управление вождением уменьшается, режим движения с автоматическим управлением, в котором транспортное средство движется при автоматическом управлении углом поворота и т.п., может быть приведен в пример в дополнение к управлению движущей силой и управлению переключением передач.
[0004] Изобретение относится к устройству управления транспортным средством, которое может назначать первый режим движения и второй режим движения и которое предотвращает снижение эксплуатационных качеств и при этом повышает экономию топлива в соответствии с требуемыми характеристиками в каждом режиме движения.
[0005] Первый объект изобретения представляет собой транспортное средство. Транспортное средство включает в себя источник движущей силы, автоматическую коробку передач и электронный блок управления. Автоматическая коробка передач сконфигурирована для формирования множества ступеней передач, при этом каждая ступень из множества ступеней передач имеет свое передаточное число. Электронный блок управления сконфигурирован для выполнения первого режима движения и второго режима движения. Первый режим движения представляет собой режим, в котором управление движущей силой и управление переключением передач автоматической коробки передач выполняются в соответствии с осуществляемым водителем управлением ускорением или управления замедлением. Второй режим движения представляет собой режим, в котором целевое состояние движения назначается независимо от выполнения управления ускорением или управления замедлением в состоянии присутствия водителя в транспортном средстве и в котором выполняются управление движущей силой и управление переключением передач. В качестве условия переключения передач для управления переключением передач определяют условие включения повышающей передачи и условие включения понижающей передачи, основанные на параметре, связанном с движущей силой, а также параметре, связанном со скоростью транспортного средства. Величина гистерезиса между заданным условием включения повышающей передачи и заданным условием включения понижающей передачи в первом режиме движения отличается от величины гистерезиса во втором режиме движения. Электронный блок управления сконфигурирован для принятия решения о переключении передачи относительно того, выполнять ли переключение передачи во втором режиме движения в соответствии с условием переключения передач с меньшей величиной гистерезиса, чем величина гистерезиса в первом режиме движения. Электронный блок управления сконфигурирован для предотвращения переключения передач, по меньшей мере, либо при условии включения повышающей передачи, либо при условии включения понижающей передачи в более существенной степени во втором режиме движения, чем в первом режиме движения.
[0006] При такой конфигурации переключение передачи предотвращается в более существенной степени во втором режиме движения, чем в первом режиме движения. Соответственно, частое переключение передач ступени передач автоматической коробки передач во втором режиме движения предотвращается, и достигается превосходное качество движения. Между тем, поскольку величина гистерезиса между условием включения повышающей передачи и условием включения понижающей передачи меньше во втором режиме движения, чем в первом режиме движения, длительность движения на оптимальной ступени передачи увеличивается во втором режиме движения, и экономия топлива возрастает. То есть, во втором режиме движения быстрота изменения движущей силы не является настолько необходимой независимо от состояния ускорения и замедления, как в первом режиме движения. Таким образом, даже когда переключение передач предотвращается, существует небольшая вероятность того, что водитель ощутит дискомфорт. Соответственно, даже в случаях, когда величина гистерезиса условия переключения передач уменьшается и когда условие переключения передач назначается для увеличения продолжительности движения на оптимальной ступени передачи, быстрота изменения движущей силы, ожидаемая водителем, не сдерживается, и частое переключение передач может быть предотвращено.
[0007] В транспортном средстве электронный блок управления может быть сконфигурирован для предотвращения переключения передач путем ограничения величины возрастания движущей силы в заданный промежуток времени в более существенной степени во втором режиме движения, чем в первом режиме движения. Заданный промежуток времени может представлять собой промежуток времени, в котором движущая сила возрастает.
[0008] При такой конфигурации величина возрастания движущей силы во время возрастания движущей силы больше ограничивается во втором режиме движения, чем в первом режиме движения. Соответственно, во втором режиме движения быстрое изменение движущей силы предотвращается, и качество движения возрастает. Кроме того, включение понижающей передачи, которое связано с возрастанием движущей силы, предотвращается, и возникновение частого переключения передач менее вероятно.
[0009] В транспортном средстве электронный блок управления может быть сконфигурирован, чтобы сделать верхний предел скорости изменения движущей силы в заданный промежуток времени во втором режиме движения меньше, чем верхний предел скорости изменения движущей силы в заданный промежуток времени в первом режиме движения.
[0010] При такой конфигурации во втором режиме движения верхний предел скорости изменения во время возрастания движущей силы делается меньше, чем таковой в первом режиме движения. Соответственно, во втором режиме движения быстрое изменение движущей силы предотвращается, и качество движения возрастает. Кроме того, включение понижающей передачи, которое связано с возрастанием движущей силы, предотвращается, и возникновение частого переключения передач менее вероятно. Кроме того, пока скорость изменения не достигнет верхнего предела, движущая сила меняется таким же образом, что и в первом режиме движения. Таким образом, обеспечиваются характеристики движущей силы в такой же степени, что и в первом режиме движения.
[0011] В транспортном средстве, электронный блок управления может быть сконфигурирован, чтобы делать верхнюю предельную величину движущей силы в период ограничения переключения передач во втором режиме движения меньше, чем верхняя предельная величина движущей силы в первом режиме движения. Период ограничения переключения передач может представлять собой заранее заданный период после выполнения переключения передачи.
[0012] При такой конфигурации только в заранее заданный период ограничения переключения передач после переключения передачи верхняя предельная величина движущей силы во время возрастания движущей силы ограничена меньшей величиной во втором режиме движения, чем в первом режиме движения. Соответственно, во втором режиме движения включение понижающей передачи предотвращается, и возникновение частого переключения передач менее вероятно. В частности, согласно этой конфигурации, верхняя предельная величина движущей силы ограничена в диапазоне, где текущая ступень передачи может поддерживаться на основе условия переключения передач. Соответственно, включение понижающей передачи надежно воспрещается в период ограничения переключения передач, и частое переключение передач предотвращается.
[0013] В транспортном средстве электронный блок управления может быть сконфигурирован для ограничения верхней предельной величины движущей силы в диапазоне, где текущая ступень передачи может быть установлена на основе условия переключения передач во втором режиме движения.
[0014] В транспортном средстве электронный блок управления может быть сконфигурирован, чтобы не осуществлять переключение передачи на основе особого условия, когда электронный блок управления принимает решение выполнить переключение передачи во втором режиме движения.
[0015] При такой конфигурации, когда выполнение принятия решения о переключении передачи делается во втором режиме движения, переключение передач воспрещается на основе особого условия. Таким образом, частое переключение передач предотвращается.
[0016] В транспортном средстве электронный блок управления может быть сконфигурирован, чтобы не осуществлять переключение передачи, пока не истечет время задержки. Время задержки может представлять собой промежуток времени, в течение которого электронный блок управления не выдает команду на переключение передачи, после того, как электронный блок управления примет решение выполнить переключение передачи. Время задержки во втором режиме движения может быть больше, чем время задержки в первом режиме движения.
[0017] В транспортном средстве электронный блок управления может быть сконфигурирован, чтобы не осуществлять переключение передачи до тех пор, пока число принятия решения не достигнет заданного числа принятия решения. Это число принятия решения может представлять собой число, для которого электронный блок управления принимает решение выполнить переключение передачи. Заданное число принятия решения во втором режиме движения может быть больше, чем заданное число принятия решения в первом режиме движения.
[0018] В транспортном средстве электронный блок управления может быть сконфигурирован, чтобы не осуществлять переключение передач в период ограничения переключения передач, когда электронный блок управления принимает решение выполнить переключение передачи. Период ограничения переключения передач во втором режиме движения может быть больше, чем период ограничения переключения передач в первом режиме движения.
[0019] В транспортном средстве электронный блок управления может быть сконфигурирован, чтобы предотвратить только включение понижающей передачи при выполнении условия включения понижающей передачи и разрешить включение повышающей передачи при выполнении условия включения повышающей передачи.
[0020] При такой конфигурации электронный блок управления предотвращает включение только понижающей передачи и разрешает включение повышающей передачи. Таким образом, в то время, как частое переключение передач предотвращается путем предотвращения включения понижающей передачи, экономия топлива может повыситься при включении повышающей передачи.
[0021] В транспортном средстве второй режим движения может включать в себя множество режимов движения, в которых вклад водителя в управление вождением отличается. Электронный блок управления может быть сконфигурирован для принятия решения о переключении передачи в соответствии с условием переключения передач с меньшей величиной гистерезиса в первый заданный промежуток времени, чем величина гистерезиса во второй заданный промежуток времени. Первый заданный промежуток времени может представлять собой такой промежуток времени во втором режиме движения, в котором вклад водителя в управление вождением является небольшим. Второй заданный промежуток времени может представлять собой такой промежуток времени во втором режиме движения, в котором вклад водителя в управление вождением является большим.
[0022] При такой конфигурации, в случае, когда множество режимов движения, в которых вклад водителя в управление вождением отличается, представлено как второй режим движения, во втором режиме движения, в котором вклад водителя в управление вождением является небольшим, принятие решения о переключении передачи делается в соответствии с условием переключения передач с меньшей величиной гистерезиса, чем величина гистерезиса в таком втором режиме движения, в котором вклад водителя в управление вождением является большим. Соответственно, во втором режиме движения, в котором вклад водителя в управление вождением является небольшим, в то время как частое переключение передач предотвращается, продолжительность движения на оптимальной ступени передачи дополнительно увеличивается. Таким образом, дополнительно возрастает экономия топлива. То есть, когда вклад водителя в управление вождением уменьшается, управление движущей силой выполняется на основе различных типов информации. Например, управление движущей силой может осуществляться путем прогнозирования ситуаций (поворотов, подъемов и спусков, и т.п.) на дороге спереди от текущего положения. Соответственно, движущая сила плавно меняется. Таким образом, в то время как частое переключение передач предотвращается, величина гистерезиса может дополнительно уменьшиться.
[0023] В транспортном средстве электронный блок управления может быть сконфигурирован для увеличения степени предотвращения переключения передач, чтобы она была больше в первом заданном промежутке времени, чем во втором заданном промежутке времени.
[0024] При такой конфигурации во втором режиме движения, в котором вклад водителя в управление вождением является небольшим, степень предотвращения переключения передач больше, чем степень предотвращения переключения передач во втором режиме движения, в котором вклад водителя в управление вождением является большим. Соответственно, даже когда величина гистерезиса уменьшается во втором режиме движения, в котором вклад водителя в управление вождением является небольшим, частое переключение передач надлежащим образом предотвращается. Между тем, во втором режиме движения, в котором вклад водителя в управление вождением является большим, степень предотвращения переключения передач является небольшой. Соответственно, относительно высокая быстрота изменения движущей силы достигается переключением передач. Таким образом, надлежащая быстрота изменения движущей силы достигается в соответствии с вкладом водителя в управление вождением.
[0025] В транспортном средстве второй режим движения может включать в себя режим движения с постоянной скоростью и режим движения с автоматическим управлением. Режим движения с постоянной скоростью может представлять собой режим, в котором транспортное средство движется с назначенной водителем целевой скоростью транспортного средства, являющейся целевым состоянием движения, и в котором водитель управляет углом поворота. Режим движения с автоматическим управлением может представлять собой режим, в котором, в дополнение к управлению движущей силой и управлению переключением передач, транспортное средство движется путем автоматического управления углом поворота на основе информации о ситуации на дороге. Электронный блок управления может быть сконфигурирован, чтобы в режиме движения с автоматическим управлением принимать решение о переключении передачи в соответствии с условием переключения передач с меньшей величиной гистерезиса, чем величина гистерезиса в режиме движения с постоянной скоростью.
[0026] При такой конфигурации, в случае, когда режим движения с постоянной скоростью и режим движения с автоматическим управлением представлены в качестве второго режима движения, в режиме движения с автоматическим управлением принятие решения о переключении передач делается в соответствии с условием переключения передач с меньшей величиной гистерезиса, чем величина гистерезиса в режиме движения с постоянной скоростью. Соответственно, в режиме движения с автоматическим управлением, в то время, как частое переключение передач предотвращается, продолжительность движения на оптимальной ступени передачи дополнительно увеличивается. Таким образом, экономия топлива дополнительно возрастает. То есть в случае режима движения с автоматическим управлением, в котором угол поворота управляется автоматически, управление движущей силой выполняется путем прогнозирования ситуаций (поворотов, подъемов-спусков, и т.п.) на дороге впереди от текущего местоположения. Соответственно, движущая сила дополнительно плавно меняется. Таким образом, в то время, как частое переключение передач предотвращается, величина гистерезиса может дополнительно уменьшиться.
[0027] В транспортном средстве электронный блок управления может быть сконфигурирован для увеличения степени предотвращения переключения передач, чтобы она была больше в режиме движения с автоматическим управлением, чем в режиме движения с постоянной скоростью.
[0028] При такой конфигурации в режиме движения с автоматическим управлением степень предотвращения переключения передач больше, чем степень предотвращения переключения передач в режиме движения с постоянной скоростью. Соответственно, даже когда величина гистерезиса уменьшается в режиме движения с автоматическим управлением, частое переключение передач надлежащим образом предотвращается. Между тем, в режиме движения с постоянной скоростью, степень предотвращения переключения передач является небольшой. Соответственно, относительно высокая быстрота изменения движущей силы достигается переключением передач. Таким образом, надлежащая быстрота изменения движущей силы может быть сохранена, с тем, чтобы предотвратить изменение скорости транспортного средства, которое придает чувство дискомфорта водителю.
[0029] В транспортном средстве второй режим движения может включать в себя режим движения с отслеживанием и режим движения с автоматическим управлением. Режим движения с отслеживанием может представлять собой режим, в котором вычисляется целевая движущая сила, которая позволяет транспортному средству выполнять движение с отслеживанием по отношению к предыдущему транспортному средству, в котором транспортное средство движется с целевой движущей силой, являющейся целевым состоянием движения, и в котором водитель управляет углом поворота. Режим движения с автоматическим управлением может представлять собой режим, в котором, в дополнение к управлению движущей силой и управлению переключением передач, транспортное средство движется путем автоматического управления углом поворота на основе информации о ситуации на дороге. Электронный блок управления может быть сконфигурирован, чтобы в режиме движения с автоматическим управлением принимать решение о переключении передачи в соответствии с условием переключения передач с меньшей величиной гистерезиса, чем величина гистерезиса в режиме движения с отслеживанием.
[0030] При такой конфигурации, в случае, когда режим движения с отслеживанием и режим движения с автоматическим управлением представлены в качестве второго режима движения, в режиме движения с автоматическим управлением принятие решения о переключении передачи делается в соответствии с условием переключения передач с меньшей величиной гистерезиса, чем величина гистерезиса в режиме движения с отслеживанием. Соответственно, в режиме движения с автоматическим управлением, в то время, как частое переключение передач предотвращается, продолжительность движения на оптимальной ступени передачи дополнительно увеличивается. Таким образом, экономия топлива дополнительно возрастает. То есть в режиме движения с автоматическим управлением, в котором угол поворота управляется автоматически, управление движущей силой выполняется путем прогнозирования ситуаций (поворотов, подъемов-спусков, и т.п.) на дороге впереди от текущего местоположения. Соответственно, движущая сила дополнительно плавно меняется. Таким образом, в то время, как частое переключение передач предотвращается, величина гистерезиса может дополнительно уменьшиться.
[0031] В транспортном средстве электронный блок управления может быть сконфигурирован для увеличения степени предотвращения переключения передач, чтобы она была больше в режиме движения с автоматическим управлением, чем в режиме движения с отслеживанием.
[0032] При такой конфигурации в режиме движения с автоматическим управлением степень предотвращения переключения передач больше, чем степень предотвращения переключения передач в режиме движения с отслеживанием. Соответственно, даже когда в этой конфигурации величина гистерезиса уменьшается в режиме движения с автоматическим управлением, частое переключение передач надлежащим образом предотвращается. Между тем, в режиме движения с отслеживанием степень предотвращения переключения передач является небольшой. Соответственно, относительно высокая быстрота изменения движущей силы достигается переключением передач. Таким образом, надлежащая быстрота изменения движущей силы может быть сохранена, с тем, чтобы предотвратить изменение расстояния между транспортными средствами, которое придает чувство дискомфорта водителю.
[0033] Второй объект изобретения представляет собой способ управления транспортным средством. Транспортное средство включает в себя источник движущей силы, автоматическую коробку передач и электронный блок управления. Автоматическая коробка передач сконфигурирована для формирования множества ступеней передачи, при этом каждая ступень из множества ступеней передачи имеет свое передаточное число. Способ управления включает в себя: выполнение посредством электронного блока управления первого режима движения и второго режима движения; выполнение посредством электронного блока управления принятия решения о переключении передачи относительно того, выполнять ли переключение передачи во втором режиме движения в соответствии с условием переключения передач с меньшей величиной гистерезиса, чем величина гистерезиса в первом режиме движения; и предотвращение посредством электронного блока управления переключения передачи, по меньшей мере, либо при условии включения повышающей передачи, либо при условии включения понижающей передачи в более существенной степени во втором режиме движения, чем в первом режиме движения. Первый режим движения представляет собой режим, в котором управление движущей силой и управление переключением передач автоматической коробки передач выполняются в соответствии с осуществляемым водителем управлением ускорением или замедлением. Второй режим движения представляет собой режим, в котором целевое состояние движения назначается независимо от выполнения водителем управления ускорением или замедлением в состоянии присутствия водителя в транспортном средстве, и в котором выполняются управление движущей силой и управление переключением передач. В качестве условия переключения передач для управления переключением передач определяют условие включения повышающей передачи и условие включения понижающей передачи, основанные на параметре, связанном с движущей силой, а также на параметре, связанном со скоростью транспортного средства. Величина гистерезиса между заданным условием включения повышающей передачи и заданным условием включения понижающей передачи в первом режиме движения отличается от величины гистерезиса во втором режиме движения.
[0034] При такой конфигурации во втором режиме движения переключение передач предотвращается по сравнению с первым режимом движения. Соответственно, частое переключение передач ступени передачи автоматической коробки передач во втором режиме движения предотвращается, и достигается превосходное качество движения. Между тем, поскольку величина гистерезиса между условием включения повышающей передачи и условием включения понижающей передачи меньше во втором режиме движения, чем в первом режиме движения, длительность движения на оптимальной ступени передачи увеличивается во втором режиме движения, и экономия топлива возрастает. То есть во втором режиме движения быстрота реагирования движущей силы на состояние ускорения и замедления, как в первом режиме движения, не является необходимой. Таким образом, даже когда переключение передач предотвращается, существует небольшая вероятность того, что водитель испытает ощущение дискомфорта. Соответственно, даже в случаях, когда величина гистерезиса условия переключения передач уменьшается, и когда условие переключения передач назначается для увеличения продолжительности движения на оптимальной ступени передачи, ожидаемая быстрота изменения движущей силы, выполняемого водителем, не затрагивается, и частое переключение передач может быть предотвращено. КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0035] Признаки, преимущества, а также техническая и промышленная значимость иллюстративных примеров осуществления изобретения будут описаны ниже со ссылкой на сопроводительные чертежи, в которых одинаковые ссылочные позиции обозначают одинаковые элементы, и на которых:
Фиг. 1 представляет собой общую схему, которая иллюстрирует особое транспортное приводное устройство для гибридного транспортного средства, на котором применено изобретение, и показывает главный блок системы управления;
Фиг. 2 представляет собой коллинеарную диаграмму, которая иллюстрирует относительную скорость вращения каждого вращающегося элемента блока дифференциала электрического типа на фиг. 1;
Фиг. 3 представляет собой таблицу срабатывания сцепления, который иллюстрирует множество ступеней передачи автоматической коробки передач и устройства фрикционного сцепления для формирования множества ступеней передачи на фиг. 1;
Фиг. 4 представляет собой схему, которая иллюстрирует один пример входных/выходных сигналов электронного блока управления, расположенного в транспортном приводном устройстве с фиг. 1;
Фиг. 5 представляет собой блок-схему, которая, в частности, иллюстрирует содержание процедуры обработки сигналов, выполняемой блоком порежимного принятия решения о переключении передач блока управления ступенчатым переключением передач с фиг. 1;
Фиг. 6 представляет собой диаграмму, которая иллюстрирует один пример карты переключения передач во время приводного движения, которое устанавливается на этапах Q8 - Q11 с фиг. 5, и представляет собой диаграмму, который иллюстрирует один пример карты переключения источника движущей силы, используемой для переключения между движением посредством двигателя внутреннего сгорания и движением посредством электродвигателя;
Фиг. 7 представляет собой диаграмму, которая иллюстрирует один пример карты переключения передач во время приводного движения;
Фиг. 8 представляет собой блок-схему, которая, в частности, иллюстрирует содержание процедуры обработки сигналов, выполняемой блоком ограничения переключения передач блока управления ступенчатым переключением передач с фиг. 1;
Фиг. 9 представляет собой один пример временной диаграммы, которая, в частности, иллюстрирует задержку 1 выдачи команды на переключение передачи, назначаемую на этапе R 9 с фиг. 8;
Фиг. 10 представляет собой один пример временной диаграммы, которая, в частности, иллюстрирует задержку 2 выдачи команды на переключение передачи, назначаемую на этапе R 10 с фиг. 8;
Фиг. 11 представляет собой блок-схему, которая иллюстрирует другой пример процедуры обработки сигналов, выполняемой блоком ограничения переключения передач блока управления ступенчатым переключением передач на фиг. 1;
Фиг. 12 представляет собой один пример временной диаграммы, которая, в частности, иллюстрирует выходной интервал 1 переключения передачи, назначаемый на этапе R 9-2 с фиг. 11;
Фиг. 13 представляет собой один пример временной диаграммы, которая, в частности, иллюстрирует выходной интервал 3 переключения передачи, назначаемый на этапе R 11-2 с фиг. 11;
Фиг. 14 представляет собой блок-схему, который иллюстрирует еще один пример процедуры обработки сигналов, выполняемой блоком ограничения переключения передач блока управления ступенчатым переключением передач на фиг. 1;
Фиг. 15 представляет собой схему, которая, в частности, иллюстрирует функции, связанные с приводной системой, выполняемые блоком управления режимом движения с автоматическим управлением на фиг. 1;
Фиг. 16 представляет собой блок-схему, которая, в частности, иллюстрирует содержание процедуры обработки сигналов, выполняемой блоком порежимного управления движущей силой с фиг. 15;
Фиг. 17 представляет собой один пример временной диаграммы, которая иллюстрирует скорость 1 изменения и скорость 4 изменения движущей силы, назначаемые на этапах S 8, S 11 с фиг. 16;
Фиг. 18 представляет собой блок-схему, который иллюстрирует другой пример процедуры обработки сигналов, выполняемой блоком порежимного управления движущей силой с фиг. 15;
Фиг. 19 представляет собой один пример временной диаграммы, которая иллюстрирует предел 1 и предел 4 движущей силы, назначаемые на этапах S 8-2, S 11-2 с фиг. 18;
Фиг. 20 представляет собой схему, которая иллюстрирует другой пример особого транспортного приводного устройства для гибридного транспортного средства, на котором предпочтительно применено изобретение; и
Фиг. 21 представляет собой таблицу срабатывания сцепления, которая иллюстрирует множество ступеней передачи автоматической коробки передач и устройства фрикционного зацепления для формирования множества ступеней передачи с фиг. 20.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ
ИЗОБРЕТЕНИЯ
[0036] Предпочтительно применение изобретения на гибридном транспортном средстве, на котором имеется двигатель внутреннего сгорания и электродвигатель в качестве источника движущей силы. Однако, изобретение может также применяться на транспортном средстве с приводом от двигателя внутреннего сгорания, которое имеет только двигатель внутреннего сгорания в качестве источника движущей силы, а также на электрическом транспортном средстве, который имеет только электродвигатель в качестве источника движущей силы. Двигатель внутреннего сгорания представляет собой двигатель внутреннего сгорания типа бензинового двигателя или дизельного двигателя, который генерирует энергию за счет сжигания топлива. В качестве электродвигателя предпочтительно используется электродвигатель-генератор, который может также использоваться как генератор.
[0037] В качестве автоматической коробки передач предпочтительно используется ступенчатая автоматическая коробка передач типа планетарной передачи с параллельным валом и т.п., которая может формировать множество ступеней передачи в соответствии с включенными / отключенными состояниями множества устройств фрикционного сцепления. Бесступенчатая коробка передач, например, бесступенчатая коробка передач ременного типа может также формировать множество ступеней передачи, каждая из которых имеет свое передаточное число, для достижения ступенчатого переключения передач. Условие включения повышающей передачи и условие включения понижающей передачи определяются на основе параметра, который связан с движущей силой, а также параметра, который связан со скоростью транспортного средства. Кроме того, условие включения повышающей передачи и условие включения понижающей передачи определяются так, что ступень передачи переключается на ступень передачи в сторону более низкой скорости с более высоким передаточным числом, когда движущая сила возрастает, и ступень передачи переключается на ступень передачи в сторону более низкой скорости, когда скорость транспортного средства уменьшается. Параметр, связанный с движущей силой, в первом режиме движения представляет собой величину нажатия педали акселератора или крутящий момент источника движущей силы (степень открытия дроссельного клапана двигателя, крутящий момент электродвигателя и т.п.), и во втором режиме движения этот параметр является, например, целевой движущей силой, целевым ускорением, целевым крутящим моментом, крутящим моментом источника движущей силы, который управляется в соответствии с этими значениями и т.п. Величина нажатия педали акселератора или крутящий момент источника движущей силы преобразуется в целевую движущую силу, целевое ускорение, целевой крутящий момент и т.п. В качестве альтернативного варианта целевая движущая сила, целевое ускорение или целевой крутящий момент преобразуется в величину нажатия педали акселератора или крутящий момент источника движущей силы. Таким образом, предпочтительно назначается условие включения повышающей передачи и условие включения понижающей передачи, которые являются общими, независимо от типа режима движения. В качестве параметра, который связан со скоростью транспортного средства, может использоваться выходная скорость вращения, который соответствует скорости транспортного средства, либо же может использоваться входная скорость вращения, например, скорость двигателя.
[0038] Например, эталонное условие переключения передачи для изменения ступени передачи на оптимальную ступень передачи, которое определяется в соответствии с топливной экономичностью и т.п., назначается в качестве условия включения повышающей передачи. При этом условие включения понижающей передачи назначается путем смещения условия включения повышающей передачи в сторону высокой движущей силы и в сторону низкой скорости транспортного средства. Таким образом, возникает гистерезис между условием включения повышающей передачи и условием включения понижающей передачи. Однако, гистерезис может возникнуть следующим образом: условие включения понижающей передачи соответствует эталонному условию переключения передач, и условие включения повышающей передачи устанавливается путем смещения условия включения понижающей передачи в сторону низкой движущей силы и сторону высокой скорости транспортного средства. В качестве альтернативного варианта, гистерезис может возникнуть путем назначения условия включения повышающей передачи и условия включения понижающей передачи таким образом, чтобы они находились с обеих сторон от эталонного условия переключения передач и сдвигаться от эталонного условия переключения передач.
[0039] Целевое состояние движения во втором режиме движения включает в себя, например, целевую скорость транспортного средства, целевое расстояние между транспортными средствами, целевое ускорение, целевой крутящий момент, целевую движущую силу, целевое усилие торможения, целевой угол поворота и т.п. Более конкретно, второй режим движения может представлять собой режим движения с постоянной скоростью, режим движения с отслеживанием, режим движения с автоматическим управлением и т.п. В режиме движения с постоянной скоростью целевая движущая сила вычисляется таким образом, что транспортное средство движется с целевой скоростью транспортного средства, назначенной водителем, и транспортное средство в силу этого движется, по существу, с постоянной скоростью транспортного средства. В режиме движения с отслеживанием целевая движущая сила вычисляется на основе расстояния между транспортными средствами, определяемого от предыдущего транспортного средства, и транспортное средство в силу этого движется, следуя за предыдущим транспортным средством на заданном целевом расстоянии между транспортными средствами. В режиме движения с автоматическим управлением целевая скорость транспортного средства успешно назначается на основе информации о дорожной обстановке и т.п. маршрута движения для вычисления целевой движущей силы, а угол поворота управляется автоматически для обеспечения движения. При реализации изобретения допускается только один из вторых режимом движения. Вместо преобразования величины нажатия педали акселератора или крутящего момента источника движущей силы в целевую движущую силу, величина нажатия педали акселератора или крутящий момент источника движущей силы могут быть преобразованы в целевое ускорение или целевой крутящий момент, и управление движущей силой может в силу этого выполняться.
[0040] В режиме движения с постоянной скоростью и режиме движения с отслеживанием, описанных выше, может быть принята автоматическая система рулевого управления. Автоматическая система рулевого управления автоматически управляет углом поворота путем определения полосы движения с помощью камеры и т.п., при этом транспортное средство движется по полосе движения или меняет полосу. Этот случай соответствует режиму движения с автоматическим управлением. В дополнение к этому режим движения с автоматическим управлением также включает в себя случай, когда целевая скорость транспортного средства успешно и автоматически назначается на основе картографической информации и информации о маршруте движения, например, целевая движущая сила вычисляется в соответствии с целевой скоростью транспортного средства, и угол поворота управляется автоматически таким образом, что транспортное средство движется, следуя по маршруту движения. В режиме движения с автоматическим управлением транспортное средство может парковаться в гараже или может быть параллельно припарковано без участия водителя, и ни в одном из случаев не требуется картографическая информация и информация о маршруте движения. Кроме того, транспортное средство может автоматически приводиться только с автостоянки и т.п. к заданному положению, например, перед входной дверью, следуя заданному маршруту. Таким образом, могут быть приняты различные подходы. Этот режим движения с автоматическим управлением может включать в себя дистанционно управляемый режим движения с автоматическим управлением, в котором водитель отсутствует в транспортном средстве, в дополнение к режиму движения с автоматическим управлением с человеческим участием, в котором водитель присутствует в транспортном средстве. Настоящее изобретение включает в себя второй режим движения, в котором, по меньшей мере, водитель присутствует в транспортном средстве.
[0041] Блок предотвращения переключения передач служит только для предотвращения включения понижающей передачи при условии включения понижающей передачи в то время, когда движущая сила возрастает, и для разрешения включения повышающей передачи при условии включения повышающей передачи, как в то время, когда движущая сила уменьшается, например. Однако блок предотвращения переключения передач может разрешать включение понижающей передачи как таковое и предотвращать только включение повышающей передачи. В качестве альтернативного варианта, блок предотвращения переключения передач может предотвратить как включение понижающей передачи, так и включение повышающей передачи. Блок предотвращения переключения передач может также предотвращать включение понижающей передачи и/или включение повышающей передачи, связанное с изменением скорости транспортного средства, когда это необходимо. Кроме того, блок предотвращения переключения передач может равномерно предотвращать переключение передач, не делая различий между принятием решения о переключении передачи путем изменения движущей силы и принятием решения о переключении передачи путем изменения скорости транспортного средства, когда делается выполнение принятия решения о переключении передачи. Таким образом, могут быть приняты различные объекты. Блок предотвращения переключения передач сконфигурирована для предотвращения переключения передачи, например, путем выполнения такого управления, что параметр, используемый для определения условия переключения передачи, не соответствует условию переключения передачи, или путем воспрещения или задержки выдачи команды на переключение передачи и т.п., когда параметр, используемый для определения условия переключения передачи, удовлетворяет условию переключения передачи.
[0042] Кроме того, блок предотвращения переключения передач сконфигурирована для предотвращения переключения передач только в заданный период ограничения переключения передач после переключения передачи, или предотвращения переключения передач путем обеспечения времени задержки выдачи команды на переключение передачи после принятия решения о переключении передачи или достижения числа принятия решения, например. Таким образом, блок предотвращения переключения передач может равномерно предотвратить последующее переключение передачи, не делая различий между включением повышающей передачи и включением понижающей передачи. Однако, блок предотвращения переключения передач может предотвратить либо только включение повышающей передачи, либо только включение понижающей передачи. Кроме того, блок предотвращения переключения передач может предотвратить, по меньшей мере, только один тип возвратного переключения передач, который включает в себя включение повышающей передачи после включения понижающей передачи, и включение понижающей передачи после включения повышающей передачи. Таким образом, могут быть приняты различные подходы. В любом из вышеуказанных случаев, период ограничения переключения передач или время задержки увеличиваются или число принятие решения возрастает таким образом, что переключение передач предотвращается в более существенной степени во втором режиме движения, чем в первом режиме движения.
[0043] Между режимом движения с автоматическим управлением и режимом движения с постоянной скоростью, а также между режимом движения с автоматическим управлением и режимом движения с отслеживанием величина гистерезиса между условиями переключения передач может быть изменена, и также может быть изменена степень предотвращения переключения передач. Кроме того, между режимом движения с постоянной скоростью и режимом движения с отслеживанием величина гистерезиса между условиями переключения передач может быть изменена, а также может быть изменена степень предотвращения переключения передач. Например, по сравнению с режимом движения с постоянной скоростью, имеется высокая вероятность того, что в режиме движения с отслеживанием изменение движущей силы возрастет. Таким образом, можно рассмотреть уменьшение степени предотвращения переключения передач и увеличения величины гистерезиса между условиями переключения передач в режиме движения с отслеживанием.
[0044] Во время первого режима движения блок предотвращения переключения передач не всегда должен предотвращать переключение передачи, и нет необходимости ограничивать верхний предел скорости изменения движущей силы и назначать верхнюю предельную величину движущей силы, например. Кроме того, когда блок порежимного принятия решения о переключении передач осуществляет выполнение принятия решения о переключении передачи, переключение передачи может немедленно выполниться. Следует отметить, что скорость изменения движущей силы соответствует величине изменения или скорости изменения движущей силы в единицу времени. Верхний предел скорости изменения движущей силы может быть определен так, чтобы иметь постоянную величину в каждом режиме движения. Однако, верхний предел скорости изменения движущей силы может надлежащим образом меняться из-за условий движения транспортного средства, рабочего состояния водителя и т.п. Например, верхний предел скорости изменения может меняться в соответствии со скоростью транспортного средства и т.п. во время запуска или пониженной передачи, например.
[0045] Подробное описание будет приведено ниже согласно примеру осуществления изобретения со ссылкой на чертежи. Фиг. 1 представляет собой общую схему особого транспортного приводного устройства 10 для гибридного транспортного средства, на котором применено изобретение, и показывает главный блок системы управления. Это транспортное приводное устройство 10 включает в себя последовательно расположенные двигатель 12 внутреннего сгорания, блок дифференциала 14 электрического типа и автоматическую коробку передач 16. Двигатель 12 внутреннего сгорания представляет собой двигатель типа бензинового двигателя или дизельного двигателя, и его выходная мощность управляется контроллером 40 выхода двигателя внутреннего сгорания. Контроллер 40 выхода двигателя внутреннего сгорания включает в себя, например, электронный дроссельный клапан 100, топливный инжектор 102, воспламенитель 104 и т.п., которые показаны на фиг. 4. Выходная мощность двигателя управляется электрическим путем, когда в соответствии с управляющим сигналом, подаваемым из электронного блока 50 управления управляется каждое из следующих устройств: электронный дроссельный клапан 100, топливный инжектор 102, воспламенитель 104, и т.п. Блок дифференциала 14 электрического типа включает в себя планетарное редукторное устройство 18 однорядного шестеренчатого типа в качестве дифференциального зубчатого механизма. Планетарное редукторное устройство 18 включает в себя водило СА0, солнечную шестерню S0 и кольцевую шестерню R0 таким образом, чтобы допускать их дифференциальное вращение, причем водило СА0 при этом соединено с двигателем 12, солнечная шестерня SO соединена с первым электродвигателем-генератором ЭГ1, и кольцевая шестерня R0 соединена с промежуточным трансмиссионным элементом 20. Второй электродвигатель-генератор ЭГ2 подключен к промежуточному трансмиссионному элементу 20. Следует отметить, что и блок дифференциала 14 электрического типа, и автоматическая коробка передач 16 сконфигурированы так, чтобы быть по существу симметричными относительно своей оси, и таким образом, их нижняя половина не показана на схеме на фиг. 1.
[0046] Фиг. 2 представляет собой коллинеарную диаграмму, на которой скорость вращения трех вращающихся элементов S0, CA0, R0 блока дифференциала 14 электрического типа может быть соединена прямой линией. Скорость вращения Nэг1 солнечной шестерни S0 соответствует скорости вращения первого электродвигателя-генератора ЭГ1 (скорости вращения ЭГ1). Скорость Nдвс вращения водила CA0 соответствует скорости двигателя 12 внутреннего сгорания (скорости двигателя). Скорость Nэг2 вращения кольцевой шестерни R0 соответствует скорости вращения второго электродвигателя-генератора ЭГ2 (скорости вращения ЭГ2). Посредством управления регенеративным крутящим моментом или управления силовым крутящим моментом первого электродвигателя-генератора ЭГ1 и второго электродвигателя-генератора ЭГ2, скорость вращения Nэг2 ЭГ2, которая представляет собой скорость вращения выхода дифференциала по отношению к скорости Nдвс двигателя, которая является скоростью вращения входа дифференциала, может непрерывно бесступенчато изменяться. Другими словами, блок дифференциала 14 электрического типа функционирует в качестве бесступенчатой коробки передач электрического типа, которая может непрерывно изменять передаточное число γ0 (= Nдвс / Nэг2). Как первый электродвигатель-генератор ЭГ1, так и второй электродвигатель-генератор ЭГ2 соединены с устройством 24 аккумулирования электроэнергии, которое может заряжаться / разряжаться через инвертор 22, и крутящий момент его электродвигателя электрически управляется в соответствии с сигналом управления электродвигателем из электронного блока 50 управления. Каждый из этих электродвигателей-генераторов ЭГ1 и ЭГ2 имеет функцию электродвигателя и генератора. Первый электродвигатель-генератор ЭГ1 главным образом используется в качестве генератора и генерирует силу реакции, а второй электродвигатель-генератор ЭГ2 в основном используется в качестве электродвигателя и выдает движущую силу. Двигатель 12, блок дифференциала 14 электрического типа и второй электродвигатель-генератор ЭГ2 функционируют как источник движущей силы транспортного приводного устройства 10. Следует отметить, что, в этом примере осуществления изобретения двигатель 12 внутреннего сгорания, первый электродвигатель-генератор ЭГ1 и второй электродвигатель-генератор ЭГ2 соответственно и напрямую связаны с водилом СА0, солнечной шестерней S0 и кольцевой шестерней R0; однако при этом между ними могут быть вставлены зубчатая передача, муфта сцепления и т.п.
[0047] Автоматическая коробка передач 16 представляет собой ступенчатую коробку передач типа планетарной шестерни, изменяет скорость вращения промежуточного трансмиссионного элемента 20 и выдает измененную скорость с выходного вала 32. Более конкретно, автоматическая коробка передач 16 включает в себя первое планетарное редукторное устройство 26 однорядного шестеренчатого типа, второе планетарное редукторное устройство 28 однорядного шестеренчатого типа, а также планетарное редукторное устройство 30 однорядного шестеренчатого типа. Кроме того, автоматическая коробка передач 16 снабжена двумя муфтами сцепления C1, C2 и тремя тормозами B1, B2, ВЗ (в дальнейшем именуемыми просто муфтами С и тормозами В, когда в них нет особых признаков) в качестве гидравлических устройств фрикционного сцепления. Как показано в таблице срабатывания сцепления на фиг. 3, когда вступают в сцепление любые два элемента из этих муфт С и тормозов В, устанавливаются четыре ступени 1-4 передней передачи и ступень R задней передачи (задняя). Четыре ступени с 1-й по 4-ю передней передачи и ступень R задней передачи имеют разные передаточные числа γ1 (= Nэг2 / Nвых), которые является отношением между скоростью вращения Nэг2 промежуточного трансмиссионного элемента 20 и скоростью вращения (выходной скоростью вращения) Nвых выходного вала 32. Когда все из них расцеплены, установлено состояние N (нейтраль), в котором имеет место прерывание передачи мощности. Муфты С и тормоза В сцепляются, когда гидравлическое давление подается на каждый из них из гидравлической схемы 42 управления. Кроме того, муфты С и тормоза В управляются для сцепления/расцепления, когда электромагнитный клапан 106 автоматической трансмиссии (см. фиг. 4) и т.п. схемы 42 гидравлического управления электрически управляются в соответствии с сигналом управления переключением передачи, подаваемым из электронного блока 50 управления. Электромагнитный клапан 106 автоматической трансмиссии отдельно предусмотрен, например, для каждой из муфт С и тормозов В. Вышеупомянутый выходной вал 32 соединен с правым и левым ведущими колесами 36 через конечную редукционную передачу 34.
[0048] В таком транспортном приводном устройстве 10 блок дифференциала 14 электрического типа и автоматическая коробка передач 16 вместе могут выполнять бесступенчатое управление трансмиссией. Кроме того, блок дифференциала 14 электрического типа и автоматическая коробка передач 16 вместе могут выполнять управление переключением передач, которое сходно со ступенчатым переключением передач при управлении скоростью вращения Nэг1 ЭГ1 и т.п., при этом передаточное число блока дифференциала 14 электрического типа становится постоянным. В любом случае, чтобы оперативно и плавно выполнять переключение передач во время переключения передач автоматической коробки передач 16 в ответ на изменение скорости вращения промежуточного трансмиссионного элемента 20, которое связано с переключением ее передач, производится управление скоростью вращения каждой секции блока дифференциала 14 электрического типа, например, скоростью вращения Nэг1 ЭГ1.
[0049] Транспортное приводное устройство 10 этого примера осуществления изобретения также включает в себя автоматическую тормозную систему 44 и автоматическую систему 46 рулевого управления. Автоматическая тормозная система 44 электрически управляет тормозной силой, то есть тормозным гидравлическим давлением колесного тормоза 38, который предусмотрен в каждом ведущем колесе 36 и ведомых колесах (неведущих колесах), которые не показаны, в соответствии с сигналом управления тормозом, подаваемым из электронного блока 50 управления.
Кроме того, при нажатии ногой на педаль тормоза, которая не показана, колесный тормоз 38 снабжается гидравлическим давлением тормоза через главный тормозной цилиндр и механически генерирует тормозное усилие, которое соответствует тормозному гидравлическому давлению, то есть величине Brk тормозного усилия. Автоматическая система 46 рулевого управления электрически управляет посредством электродвигателя и т.п. углом Ф поворота в соответствии с сигналом управления углом поворота, подаваемым из электронного блока 50 управления. Угол Ф поворота может представлять собой угол поворота рулевого колеса или угол рулевого колеса.
[0050] Электронный блок 50 управления функционирует в качестве контроллера, который выполняет различные типы управления транспортным приводным устройством 10 этого примера осуществления изобретения, и различные типы управления включают в себя управление выходом двигателя 12 внутреннего сгорания, управление крутящими моментами электродвигателей-генераторов ЭГ1, ЭГ2, управление переключением передач автоматической коробки передач 16, управление тормозным усилием посредством автоматической тормозной системы 44, рулевое управление с помощью автоматической системы 46 рулевого управления и т.п. Электронный блок 50 управления может включать в себя микрокомпьютер, который включает в себя ЦП, ПЗУ, ОЗУ, интерфейс ввода/ вывода и т.п., и выполняет обработку сигналов в соответствии с программой, которая заранее заложена в ПЗУ, вместе с использованием функции временного хранения ОЗУ. При необходимости электронный блок 50 управления может также быть сконфигурирован для разделения для управления двигателем внутреннего сгорания, электродвигателем, управления переключением передач и т.п.
[0051] На фиг.4 проиллюстрированы сигналы, получаемые электронным блоком 50 управления, а также сигналы, выводимые из электронного блока 50 управления. Когда некоторые из них, в частности, описаны, датчик 70 скорости вращения двигателя внутреннего сгорания, резольвер 72 ЭГ1, резольвер 74 ЭГ2, датчик 76 скорости вращения выходного вала, датчик 78 величины нажатия ножного тормоза, датчик 80 величины нажатия педали акселератора и датчик 82 угла поворота соединены с электронным блоком 50 управления, и сигналы, обозначающие скорость Nдвс вращения двигателя внутреннего сгорания, скорость Nэг1 вращения ЭГ1, скорость Nэг2 вращения ЭГ2, скорость Nвых вращения (выходную скорость вращения) выходного вала 32, величину Brk нажатия (рабочую величину торможения) педали тормоза, величину Асс нажатия (объем работы акселератора) педали акселератора и угол Асс поворота, подаются в электронный блок 50 управления. Кроме того, переключатель 84 назначения автоматического поддержания скорости движения представляет собой устройство, который выполняет работу по выбору режима автоматического поддержания скорости движения, в котором транспортное средство обеспечивает автоматическую скорость движения или движение с отслеживанием независимо от управления ускорением/замедлением, выполняемым водителем, назначает целевую скорость VtagC транспортного средства, увеличивает / уменьшает целевую скорость VtagC транспортного средства, назначает целевое расстояние DtagC между транспортными средствами при дальнейшем движении и т.п. Например, переключатель 84 назначения автоматического поддержания скорости движения расположен на рулевом колесе и т.п., и его сигналы, которые обозначают целевую скорость VtagC транспортного средства, целевое расстояние DtagC между транспортными средствами и т.п., подаются в электронный блок 50 управления. В этом режиме автоматического поддержания скорости движения транспортное средство движется в то время, как водитель выполняет управление направлением движения. Навигационная система 86 включает в себя картографическую информацию, назначает маршрут движения в соответствии с пунктом назначения, показывает карту и маршрут движения на дисплее, который расположен на приборной панели и т.п., а также получает различные типы информации о дорожном движении, например, местоположении транспортного средства, пробках, наклоне дороги, высоте, разрешенной скорости, информацию о сигналах и погоде посредством глобальной системы определения местоположения (GPS), системы (VICS) информации и связи транспортного средства, средств коммуникации между транспортными средствами, средств коммуникации транспортных средств с дорожной инфраструктурой и т.п. Сигналы, представляющие собой эти типы информации, подаются в электронный блок 50 управления. Рабочий элемент, который позволяет выполнять различные типы действий выбора, действий назначения и т.п. посредством действия касания, действия нажимания, действия поворота и т.п., расположен на дисплее или вблизи него. При необходимости информационное коммуникационное оборудование, которое получает информацию извне, может быть отдельно выделено из навигационной системы 86. Радар 88 определяет расстояние между транспортными средствами от каждого из предыдущих транспортных средств и до следующего транспортного средства, пешеходов вблизи транспортного средства-хозяина или расстояние от препятствия. Сигналы, обозначающие эти типы информации, подаются в электронный блок 50 управления. Камера 90 представляет собой подвижную камеру, неподвижную камеру или т.п., которая захватывает изображения передней области и задней области около транспортного средства, других транспортных средств и пешеходов, присутствующих по их сторонам и т.п., препятствия, знаки, полосы движения, ограждения, парковочного места, особую метку и т.п. Сигналы, обозначающие эти виды визуальной информации, подаются в электронный блок 50 управления.
[0052] Переключатель 92 автоматического движения с человеческим участием представляет собой переключатель, который выбирает режим движения с автоматическим управлением, в котором транспортное средство движется посредством автоматического управления движущей силой транспортного средства и углом поворота Ф в состоянии, где водитель или пассажир присутствует в транспортном средстве. Переключатель 94 автоматического движения с дистанционным управлением представляет собой переключатель, который выбирает режим движения с автоматическим управлением, в котором транспортное средство движется посредством автоматического управления движущей силой транспортного средства и углом Ф поворота в состоянии, когда водитель или пассажир отсутствует. Например, этот переключатель 94 автоматического движения с дистанционным управлением встроен в беспроводную клавишу, которая блокирует и разблокирует дверь транспортного средства беспроводным способом и т.п. В этих типах автоматического движения целевая скорость транспортного средства успешно и автоматически назначается на основе картографической информации, информации о маршруте движения, различных типах информации о дорожном движении и т.п., например, целевая движущая сила вычисляется в соответствии с целевой скоростью транспортного средства, а угол Ф поворота управляется автоматически на основе дорожной информации и т.п., при этом транспортное средство движется по маршруту движения. Однако при таких типах автоматического движения транспортное средство может быть припарковано в гараже или может быть параллельно припарковано без участия водителя, и ни в одном из этих случаев не требуется картографическая информация и информация о маршруте движения. Кроме того, транспортное средство может автоматически управляться только с автостоянки и т.п. до заданного положения, например перед входной дверью, следуя заданному маршруту движения. Таким образом, могут быть приняты различные объекты изобретения. Случай, когда полоса движения обнаруживается камерой 90 и т.п., а угол Ф поворота управляется автоматически в режиме автоматического поддержания скорости движения, при этом транспортное средство движется по полосе движения или меняет полосу движения, также соответствует режиму движения с автоматическим управлением. Полоса движения, которая обнаруживается камерой 90 и т.п., также является дорожной информацией. Дистанционно управляемый режим движения с автоматическим управлением является правильным, когда транспортное средство припарковано в гараже, приводится в движение с автостоянки, и т.п. Кроме того, дистанционно управляемый режим движения с автоматическим управлением также предпочтительно принимается в случае движения в колонне (движения с отслеживанием), в котором транспортное средство следует за предшествующим направляющим транспортным средством, например. Такие переключатель 92 автоматического движения с человеческим участием и переключатель 94 автоматического движения с дистанционным управлением могут быть встроены в навигационную систему 86. Таким образом, режим движения с автоматическим управлением с человеческим участием или дистанционно управляемый режим движения с автоматическим управлением может быть выбран навигационной системой 86. Кроме того, некоторые или все функции переключателя 84 назначения автоматического поддержания скорости движения могут быть встроены в навигационную систему 86.
[0053] Вышеупомянутый электронный блок 50 управления выдает сигнал управления двигателем внутреннего сгорания на контроллер 40 выхода двигателя внутреннего сгорания (см. фиг. 1), который управляет выходной мощностью двигателя внутреннего сгорания. Таким образом, степень открывания дроссельного клапана электронного дроссельного клапана 100, величина подачи топлива топливным инжектором 102, момент зажигания двигателя 12 внутреннего сгорания воспламенителем 104 и т.п. в двигателе 12 внутреннего сгорания электрически управляются. Когда сигнал управления электродвигателем выдается на инвертор 22, крутящий момент как первого электродвигателя-генератора ЭГ1, так и второго электродвигателя-генератора ЭГ2 отдельно и электрически управляется. Сигнал управления переключением передач выдается на электромагнитные клапаны 106 автоматической трансмиссии и пр. схемы 42 гидравлического управления, а муфты С и тормоза В управляются по отдельности на сцепление/расцепление. Таким образом, заданная ступень передачи автоматической коробки 16 передач устанавливается электрически. Сигнал управления тормозом выдается в автоматическую тормозную систему 44, и тормозное усилие каждого из колесных тормозов 38 контролируется электрически. Сигнал управления углом поворота выдается на автоматическую систему 46 рулевого управления, и угол Ф поворота электрически управляется электродвигателем и т.п.
[0054] Как показано на фиг. 1, этот электронный блок 50 управления функционально включает в себя блок 52 гибридного управления, блок 54 управления ступенчатым переключением передач, блок 56 рулевого управления, блок 58 управления тормозами, блок 60 управления режимом движения с автоматическим управлением, блок 62 управления режимом автоматического поддержания скорости движения и блок 64 управления режимом движения под управлением водителя. Блок 52 гибридного управления вычисляет целевую мощность двигателя на основе потерь при трансмиссии в каждой из секций, вспомогательную нагрузку, передаточное число γ0 блока дифференциала 14 электрического типа, вспомогательный крутящий момент второго электродвигателя-генератора ЭГ2, ступень передачи (передаточное число γ1) автоматической коробки 16 передач и т.п., при этом транспортное средство управляется целевой движущей силой Ftag2, поступающей из блока 60 управления режимом движения с автоматическим управлением. При этом блок 52 гибридного управления управляет двигателем 12 внутреннего сгорания через контроллер 40 выхода двигателя внутреннего сгорания, чтобы реализовать скорость двигателя Nдвс внутреннего сгорания и крутящий момент двигателя Тдвс внутреннего сгорания, с помощью которых можно получить целевую мощность двигателя внутреннего сгорания. Передаточное число γ0 блока дифференциала 14 электрического типа определяется таким образом, что двигатель 12 внутреннего сгорания приводится в действие в пределах эффективного диапазона срабатывания. В случае с дистанционно управляемым режимом движения или режимом движения с автоматическим управлением с человеческим участием, целевая движущая сила Ftag2 успешно назначается на основе различных типов информации о дорожном движении, такой как разрешенная скорость, наклон дороги и т.п., при этом транспортное средство движется по заданному маршруту движения, и целевая движущая сила Ftag2 успешно назначается блоком 112 вычисления целевой скорости транспортного средства, блоком 132 вычисления управления с прямой связью (F/F), блоком 134 вычисления управления с обратной связью (F/B), блоком 138 порежимного управления движущей силой и т.п., показанными на фиг. 15, которая иллюстрирует функции блока 60 управления режимом движения с автоматическим управлением. Кроме того, во время движения с постоянной скоростью в режиме автоматического поддержания скорости движения транспортное средство движется с целевой скоростью VtagC транспортного средства, которая назначается заранее. Во время режима движения с отслеживанием в режиме автоматического поддержания скорости движения целевая движущая сила Ftag2 успешно назначается таким образом, что транспортное средство выполняет движение с отслеживанием, при этом поддерживая заданное целевое расстояние DtagC между транспортными средствами. Во время режима движения под управлением водителя, в котором движущая сила управляется в соответствии с управлением ускорением/замедлением (управлением ускорением или управлением замедлением), выполняемым водителем, целевая движущая сила FtagM успешно вычисляется, исходя из величины Асс нажатия педали акселератора, скорости V транспортного средства и т.п., и целевая движущая сила Ftag2 назначается на основе целевой движущей силы FtagM. Целевая скорость VtagC транспортного средства и целевое расстояние DtagC между транспортными средствами назначаются блоком 62 управления режимом автоматического поддержания скорости движения на основе сигнала от переключателя 84 назначения автоматического поддержания скорости движения. Целевая движущая сила FtagM успешно вычисляется блоком 64 управления режимом движения под управлением водителя на основе величины Асс нажатия педали акселератора, скорости V транспортного средства и т.п. Целевое расстояние DtagC между транспортными средствами выбирается, например, из трех значений: большого, среднего и малого, - и каждое из значений переменно назначается в соответствии со скоростью V транспортного средства. Блок 62 управления режимом автоматического поддержания скорости движения вычисляет целевую движущую силу FtagC посредством управления с обратной связью и т.п., при этом фактическое расстояние D между транспортными средствами от предыдущего транспортного средства, которое определяется радаром 88, становится целевым расстоянием DtagC между транспортными средствами, и целевая движущая сила Ftag2 назначается на основе целевой движущей силы FtagC. Следует отметить, что, когда целевая движущая сила Ftag2 является отрицательной (минус), источник тормозной движущей силы генерируется торможением двигателя внутреннего сгорания или рекуперативным торможением второго электродвигателя-генератора ЭГ2, и она складывается с тормозным усилием каждого из колесных тормозов 38, которые управляются блоком 58 управления тормозами, с тем, чтобы получить целевую движущую силу Ftag2. Электронный блок 50 управления имеет функцию устройства управления транспортным средством, которая позволяет транспортному средству двигаться в любом из множества режимов движения.
[0055] Кроме того, при диапазоне низкого выходного крутящего момента или диапазоне низкой скорости транспортного средства, где КПД двигателя относительно низок, блок 52 гибридного управления останавливает двигатель 12 внутреннего сгорания или приводит двигатель 12 внутреннего сгорания в состояние холостого хода, и переключает источник движущей силы в соответствии с заданной картой переключения источника движущей силы, при этом транспортное средство движется только посредством второго электродвигателя-генератора ЭГ2 в качестве источника движущей силы. Тонкая линия, которая показана в нижней левой части (области с низкой движущей силой и при низкой скорости транспортного средства) фиг. 6, представляет собой один пример карты переключения источника движущей силы, и определяется на основе скорости V транспортного средства и движущей силы (соответствующей величине Асс нажатия педали акселератора и степени открытия дроссельного клапана). В этом примере область с низкой скоростью транспортного средства и с низкой движущей силой назначается в качестве области движения посредством электродвигателя, и в этой области управление переключением источника движущей силы выполняется путем пуска или остановки двигателя 12 внутреннего сгорания и т.п. Хотя это и не показано, гистерезис возникает между линией переключения, на которой движение посредством электродвигателя переключается на движение посредством двигателя внутреннего сгорания, и линией переключения, на которой движение посредством двигателя внутреннего сгорания переключается на движение посредством электродвигателя, чтобы предотвратить частое переключение передач. Кроме того, даже во время движения посредством двигателя внутреннего сгорания, при котором транспортное средство движется с использованием двигателя 12 внутреннего сгорания в качестве источника движущей силы, электроэнергия из первого электродвигателя-генератора ЭГ1, который подвергается рекуперативному торможению, и/или электроэнергия из устройств 24 аккумулирования электроэнергии подается на второй электродвигатель-генератор ЭГ2, и крутящий момент подается на ведущие колеса 36 через управление (управление электропитанием) второго электродвигателя-генератора ЭГ2. Таким образом, содействие крутящему моменту выполняется для содействия мощности двигателя 12 внутреннего сгорания. Другими словами, когда необходимо, содействие крутящему моменту вторым электродвигатель-генератором ЭГ2 также выполняется в показанной на фиг.6 области движения посредством двигателя внутреннего сгорания.
[0056] Блок 54 управления ступенчатым переключением передач выполняет управление переключением передач автоматической коробки 16 передач в соответствии с заданной картой переключения передач, и выполняет управление сцеплением/расцеплением муфт С и тормозов В через электромагнитные клапаны 106 автоматической трансмиссии схемы 42 гидравлического управления, чтобы установить целевую ступень Gtag передачи, которая достигается в соответствии с картой переключения передач. Этот блок 54 управления ступенчатым переключением передач функционально включает в себя блок 66 порежимного принятия решения о переключении передач и блок 68 ограничения переключения передач. Блок 66 порежимного принятия решения о переключении передач назначает карту переключения передач в соответствии с режимом движения и назначает целевую ступень Gtag передачи в соответствии с картой переключения передач. Блок 66 порежимного принятия решения о переключении передач выполняет обработку сигналов, например, в соответствии с этапами Q1-Q12 (далее именуемыми просто Q1 - Q12) блок-схемы, показанной на фиг. 5.
[0057] На Q1 с фиг. 5, определяется, действительно ли режим движения с автоматическим управлением выбран путем определения того, что либо переключатель 92 автоматического движения с человеческим участием, либо переключатель 94 автоматического движения с дистанционным управлением установлен на ВКЛ. Если выбран режим движения с автоматическим управлением, выполняется Q2. Далее определяется, действительно ли дистанционно управляемый режим движения с автоматическим управлением выбран путем определения того, что переключатель 94 автоматического движения с дистанционным управлением установлен на ВКЛ. Если переключатель 94 автоматического движения с дистанционным управлением установлен на ВКЛ, на Q4 определяется, что выбран дистанционно управляемый режим движения с автоматическим управлением. Если переключатель 94 автоматического движения с дистанционным управлением не установлен на ВКЛ, на Q5 определяется, что выбран режим движения с автоматическим управлением с человеческим участием. Между тем, если определение на Q1 показывает НЕТ (отрицательный результат), то есть, если режим движения с автоматическим управлением не выбран, выполняется Q3. Далее определяется, действительно ли режим автоматического поддержания скорости движения выбран путем определения того, действительно ли выбор выполнен переключателем 84 назначения автоматического поддержания скорости движения. Если выбор выполнен переключателем 84 назначения автоматического поддержания скорости движения, на Q6 определяется, что выбран режим автоматического поддержания скорости движения. Если выбор не выполнен переключателем 84 назначения автоматического поддержания скорости движения, на Q7 определяется, что выбран обычный режим движения, то есть режим движения под управлением водителя, в котором управление движущей силой и управление переключением передач выполняются в соответствии с управлением ускорением/замедлением, выполняемым водителем, и угол поворота Ф меняется в соответствии с действием рулевого управления. Каждый из режима движения с автоматическим управлением с человеческим участием и режима автоматического поддержания скорости движения, описанные выше, соответствует второму режиму движения, в котором целевое состояние движения (целевая скорость транспортного средства, целевое расстояние между транспортными средствами, целевая движущая сила, целевой угол поворота и т.п.) назначается независимо от управления ускорением/замедлением в состоянии, когда водитель присутствует в транспортном средстве, и в котором выполняются управление движущей силой и управление переключением передач. Режим движения под управлением водителя соответствует первому режиму движения, в котором управление движущей силой и управление переключением передач выполняются в соответствии с управлением ускорением/замедлением, выполняемым водителем.
[0058] Если на Q4 определяется, что выбран дистанционно управляемый режим движения с автоматическим управлением, на Q8 назначается линия 1 переключения передач. Если на Q5 определяется, что выбран режим движения с автоматическим управлением с человеческим участием, на Q9 назначается линия 2 переключения передач. Если на Q6 определяется, что выбран режим автоматического поддержания скорости движения, на Q10 назначается линия 3 переключения передач. Если на Q7 определяется, что выбран режим движения под управлением водителя, на Q11 назначается линия 4 переключения передач. Линии переключения передач определяют условия переключения передач. Фиг. 6 представляет собой один пример карты переключения передач, в которой линии включения повышающей передачи (непрерывные линии) и линии включения понижающей передачи (линии 1-4 переключения передач) определяются в качестве линий переключения передач, определяется на основе скорости V транспортного средства и движущей силы, и определяется таким образом, что ступень передачи переключается на ступень передачи в сторону более высокой скорости при более низком передаточном числе γ1, когда скорость V транспортного средства возрастает, и что ступень передачи переключается на ступень передачи в сторону более низкой скорости с более высоким передаточным числом у1, когда движущая сила возрастает. В то время, как в этом примере осуществления изобретения фактическая движущая сила может оцениваться, исходя из крутящего момента двигателя внутреннего сгорания, крутящего момента электродвигателя, ступени передачи автоматической коробки 16 передач и т.п., движущая сила определяется с использованием целевой движущей силы Ftag2, которая вычисляется в блоке 60 управления режимом движения с автоматическим управлением. Каждая из линий включения повышающей передачи соответствует условию включения повышающей передачи, а каждая из линий включения понижающей передачи соответствует условию включения понижающей передачи. Кроме того, линии включения повышающей передачи и линии включения понижающей передачи назначаются на основе характеристик крутящего момента двигателя 12 внутреннего сгорания и т.п. с тем, чтобы можно было достичь баланса между экономией топлива и характеристиками движущей силы, например. Кроме того, чтобы предотвратить ухудшение качества движения, вызываемое частым переключением передач и т.п., создается гистерезис между линиями включения повышающей передачи и линиями включения понижающей передачи, что связано с возрастанием/уменьшением между одинаковыми ступенями передачи. Более конкретно, гистерезис создается таким образом, что линия 4→3 включения понижающей передачи смещается в направлении большей движущей силы, а также происходит смещение от линии 3→4 включения повышающей передачи в направлении более низкой скорости V транспортного средства. Сходный гистерезис создается между линией 3→2 включения понижающей передачи и линией 2→3 включения повышающей передачи, а также между линией 2→1 включения понижающей передачи и линией 1→2 включения повышающей передачи. В этом примере осуществления изобретения этот гистерезис создается посредством определения каждой из линий включения повышающей передачи в соответствии с эталонным условием переключения передач для переключения ступени передачи на оптимальную ступень передачи и посредством смещения каждой линии включения понижающей передачи в область более низкой скорости транспортного средства и в область большей движущей силы от линии включения повышающей передачи.
[0059] Линии 1-4 переключения передач, которые назначаются на Q8 - Q11, представляют собой линии включения понижающей передачи, и величины их гистерезиса, влияющие на частое переключение передач, различаются. В этом примере осуществления изобретения величины гистерезиса от общей линии включения повышающей передачи назначаются так, чтобы удовлетворять соотношению: линия 1 переключения передач<линии 2 переключения передач<линии 3 переключения передач<линии 4 переключения передач. То есть, когда величина гистерезиса возрастает, частое переключение передач предотвращается. Однако продолжительность движения на оптимальной ступени передачи сокращается, и экономия топлива может ухудшиться. По этой причине величина гистерезиса сокращается до минимальной необходимости в соответствии с режимом движения. Более конкретно, когда вклад водителя в управление уменьшается, управление движущей силой может осуществляться путем прогнозирования ускорения/замедления транспортного средства на основе маршрута движения и т.п., и быстрое изменение движущей силы возникает реже. Таким образом, величина гистерезиса может быть уменьшена.
[0060] В дистанционно управляемом режиме движения с автоматическим управлением водитель отсутствует, и нет необходимости рассматривать снижение качества движения, вызываемого частым переключением передач, по сравнению с режимом движения с человеческим участием. Соответственно, экономия топлива может быть повышена путем назначения линии 1 переключения передач с небольшой величиной гистерезиса. Величина гистерезиса может также быть назначена равной нулю (точно так же, как и линия включения повышающей передачи). В режиме движения с автоматическим управлением с человеческим участием, в котором присутствует водитель, учитывается снижение качества движения, вызываемое частым переключением передач. Соответственно, должна быть назначена линия 2 переключения передач с большой величиной гистерезиса. Между тем, управление движущей силой может осуществляться путем прогнозирования ускорения/замедления на основе маршрута движения и т.п., при этом уменьшается быстрое изменение движущей силы. Таким образом, в то время, как частое переключение передач предотвращается, величина гистерезиса может уменьшиться по сравнению с таковой в режиме движения под управлением водителя. В режиме автоматического поддержания скорости движения выполняется управление движущей силой, при этом транспортное средство движется с целевой скоростью VtagC транспортного средства и выполняет движение с отслеживанием по отношению к предыдущему транспортному средству, при этом поддерживая целевое расстояние DtagC между транспортными средствами. Соответственно, имеется тенденция, что изменение движущей силы становится более значительным, чем таковое в режиме движения с автоматическим управлением. Таким образом, назначается линия 3 переключения передач с большей величиной гистерезиса, чем линия в режиме движения с автоматическим управлением. Однако, по сравнению с режимом движения под управлением водителя, в котором водитель выполняет управление ускорением/замедлением в реальном времени, частота быстрого изменения движущей силы является небольшой. Таким образом, в то время, как частое переключение передач предотвращается, величина гистерезиса может сделаться меньше, чем таковая в режиме движения под управлением водителя. В режиме движения под управлением водителя, поскольку сам водитель делает запрос на ускорение/замедление, частота быстрого изменения движущей силы является высокой. Таким образом, назначается линия 4 переключения передач с большой величиной гистерезиса, чтобы предотвратить ухудшение качества движения, вызываемое частым переключением передач. Следует отметить, что обычная линия переключения передач может быть назначена в качестве линии 2 переключения передач в режиме движения с автоматическим управлением с человеческим участием и линии 3 переключения передач в режиме автоматического поддержания скорости движения.
[0061] Далее на следующем этапе Q12 принятие решения о переключении передач, касающееся того, изменять ли ступень передачи, делается на основе текущей движущей силы и текущей скорости V транспортного средства с использованием обычной линии включения повышающей передачи на любую из линий включения понижающей передачи, которые представляют собой линии 1-4 переключения передач, назначенные в соответствии с режимом движения на вышеуказанных этапах Q8 - Q11. Более конкретно, когда движущая сила или скорость V транспортного средства меняется так, чтобы пересекать линию включения понижающей передачи или линию включения повышающей передачи, выполнения принятия решения о переключении передач делается для назначения новой целевой ступени Gtag передачи. Если ступень передачи не нужно переключать, выполнение процедуры принятия решения о переключении передач на этом прекращается.
[0062] Следует отметить, что, в случае выбора режима с ручной (М) коробкой передач, в котором водитель может вручную переключать ступени передачи автоматической коробки 16 передач, целевая ступень Gtag передачи переключается включением повышающей передачи или включением понижающей передачи в соответствии с сигналом повышения/понижения, подаваемым с повышающего/понижающего переключателя, который не показан, и т.п. Кроме того, во время приводного движения (во время движения с торможением), во время которого целевая движущая сила Ftag2 становится отрицательной (минус) и поступает со стороны ведущих колес 36 во время спуска по склону, во время замедления и т.п., целевая ступень Gtag передачи автоматической коробки 16 передач назначается в соответствии с картой переключения передач, показанной на фиг. 7. Гистерезисы также возникают между линиями включения повышающей передачи и линиями включения понижающей передачи в качестве условия переключения передач на карте переключения передач во время этого приводного движения.
[0063] Блок 68 ограничения переключения передач воспрещает переключение передач при определенном условии, когда на вышеупомянутом этапе Q12 делается выполнение принятия решения о переключении передач для переключения передач. Блок 68 ограничения переключения передач выполняет обработку сигналов в соответствии с этапами R1 - R13 (далее именуемыми просто R1 - R13) блок-схемы на фиг. 8, например. Этот блок 68 ограничения переключения передач соответствует блоку предотвращения переключения передач.
[0064] На R1 с фиг. 8 определяется, действительно ли выполнение принятия решения о переключении передач для переключения передач было произведено на вышеупомянутом Q12. Если выполнение принятия решения о переключении передач было произведено, далее выполняется R2. Подобно этапам Q1 с Q7 с фиг. 5, на R2 - R8 определяются режимы движения. Определенные на Q4 - Q7 результаты могут считываться. Далее, если на R5 определено, что выбран дистанционно управляемый режим движения с автоматическим управлением, на R9 назначается задержка 1 выдачи команды на переключение передачи. Если на R6 определено, что выбран режим движения с автоматическим управлением с человеческим участием, на R10 назначается задержка 2 выдачи команды на переключение передачи Если на R7 определено, что выбран режим автоматического поддержания скорости движения, на R11 назначается задержка 3 выдачи команды на переключение передачи. Если на R8 определено, что выбран режим движения под управлением водителя, на R12 назначается задержка 4 выдачи команды на переключение передачи. Каждая из задержек 1-4 выдачи команды на переключение передач определяет время задержки, в течение которого команда на переключение передачи для переключения на целевую ступень Gtag передач фактически не будет выдана после принятия решения о переключении передачи. Когда время задержки увеличивается, частое переключение передач предотвращается; однако быстрота изменения движущей силы может ухудшиться. Другими словами, когда решение о переключении передач отменяется во время задержки, переключение передачи более не требуется, и частое переключение передач предотвращается. Однако, когда выполнение принятия решения о переключении передач продолжается, переключение передач задерживается на время задержки, и, таким образом, быстрота изменения движущей силы снижается. Соответственно, чтобы обеспечить гармонизацию частого переключения передач и быстроты изменения движущей силы, в этом примере осуществления изобретения время задержки назначается для удовлетворения соотношения: задержка 1 выдачи команды на переключение передачи < задержка 4 выдачи команды на переключение передачи < задержка 3 выдачи команды на переключение передачи < задержка 2 выдачи команды на переключение передачи. В этом примере осуществления изобретения задержки 1-4 выдачи команды на переключение передачи применяются и к включению повышающей передачи и включению понижающей передачи. Однако, задержки 1-4 выдачи команды на переключение передачи могут применяться только к включению понижающей передачи или могут применяться только включению повышающей передачи. Когда задержки 1-4 выдачи команды на переключение передачи применяются только к включению понижающей передачи, включение повышающей передачи оперативно выполняется при последующем принятии решения о переключении передачи, и, таким образом, экономия топлива возрастает.
[0065] В дистанционно управляемом режиме движения с автоматическим управлением водитель отсутствует, и нет необходимости рассматривать снижение качества движения, вызываемого частым переключением передач. Соответственно, длительность задержки 1 выдачи команды на переключение передачи может сократиться, и время задержки может также быть назначено равным нулю (отсутствие задержки). В режиме движения с автоматическим управлением с человеческим участием, водитель присутствует в состоянии, когда он не следит за скоростью транспортного средства и ускорения. Соответственно, его/ее чувствительность к снижению качества движения, вызываемого частым переключением передач, является наивысшей, и длительность задержки 2 выдачи команды на переключение передачи является наибольшей из задержек 1-4 выдачи команды на переключение передач. В режиме автоматического поддержания скорости движения водитель присутствует в состоянии отслеживания скорости транспортного средства и ускорения. Однако, поскольку водитель не выполняет управление ускорением/замедлением, его/ее чувствительность к снижению качества движения вызываемого частым переключением передач является более высокой, чем таковая в режиме движения под управлением водителя. Соответственно, длительность задержки 3 выдачи команды на переключение передачи назначается как второе по продолжительности время задержки после такового в режиме движения с автоматическим управлением с человеческим участием. В режиме движения под управлением водителя, поскольку сам водитель делает запрос на ускорение/замедление в реальном времени, желательна превосходная быстрота изменения движущей силы. Соответственно, длительность задержка 4 выдачи команды на переключение передачи назначается более короткой, чем длительность задержки в режиме автоматического поддержания скорости движения. Фиг. 9 представляет собой один пример временной диаграммы, который показывает зависимость между принятием решения о переключении передачи (прерывистая линия) и выдачей команды на переключение передачи (сплошная линия) во время дистанционно управляемого режима движения с автоматическим управлением. Длительность задержки 1 выдачи команды на переключение передачи является небольшой, и включение понижающей передачи или включение повышающей передачи оперативно выполняется в ответ на изменение движущей силы. Фиг. 10 представляет собой один пример временной диаграммы, который показывает зависимость между принятием решения о переключении передачи (прерывистая линия) и выдачей команды на переключение передачи (сплошная линия) во время режима движения с автоматическим управлением с человеческим участием. Длительность задержки 2 выдачи команды на переключение передачи является наибольшей. Во время задержки движущая сила уменьшается, и принятое решение о включении понижающей передачи отменяется. Соответственно, включение понижающей передачи более не требуется, и частое переключение передач предотвращается. Каждая из этих линий переключения передач на фиг. 9 и фиг. 10 служит в качестве линии включения понижающей передачи и линии включения повышающей передачи, и гистерезиса не возникает. На данных фиг. 9 и фиг. 10 время t1 является временем, в течение которого делается выполнение принятия решения о включении понижающей передачи, а время t2 является временем, в течение которого делается выполнение принятия решения о включении повышающей передачи. Следует отметить, что длительности задержек 1 и 4 выдачи команды на переключение передачи в дистанционно управляемом режиме движения с автоматическим управлением и в режиме движения под управлением водителя могут быть назначены одинаковыми, и длительности задержек 2 и 3 выдачи команды на переключение передачи в режиме движения с автоматическим управлением с человеческим участием и в режиме автоматического поддержания скорости движения могут быть назначены одинаковыми.
[0066] На R13 определяется, действительно ли удовлетворено условие выдачи команды на переключение передачи каждой из выходных задержек 1-4 переключения передач, которые назначаются на вышеупомянутых этапах R9 - R12 в соответствии с режимом движения, то есть, действительно ли выполняется принятие решения о переключении передач на целевую ступень Gtag передачи продолжается даже после истечения времени задержки. Далее, если выполнение принятия решения о переключении передач продолжается, выдается команда на переключение передачи для переключения на целевую ступень Gtag передачи, и состояния сцепления/расцепления муфт С и тормозов В изменяются. Таким образом, ступень передачи автоматической коробки 16 передач меняется на целевую ступень Gtag передачи. В случае, когда принятое решение о переключении передач отменяется до истечения времени задержки, команда на переключение передач не выдается, и последовательность действий по ограничению переключения передач заканчивается.
[0067] Фиг. 11 представляет собой блок-схему, который иллюстрирует другой аспект блока 68 ограничения переключения передач и отличается от блок-схемы с фиг. 8 тем, что вместо этапов R 9 - R 12 представлены этапы R 9-2 - R 12-2. Более конкретно, если на R5 определяется, что выбран дистанционно управляемый режим движения с автоматическим управлением, на R9-2 назначается интервал 1 переключения передач. Если на R6 определяется, что выбран режим движения с автоматическим управлением с человеческим участием, на R10-2 назначается интервал 2 переключения передач. Если на R7 определяется, что выбран режим автоматического поддержания скорости движения, на R11-2 назначается интервал 3 переключения передач. Если на R8 определяется, что выбран режим движения под управлением водителя, на R12-2 назначается интервал 4 переключения передач. Интервалы 1-4 переключения передач соответствуют числу n принятия решения о переключении передач, пока команда на переключение передачи для переключения на целевую ступень Gtag передачи не будет фактически выдана в случае, когда принятие решения о переключении передачи периодически выполняется без превышения заданного времени ожидания. Когда число n принятия решения возрастает, частое переключение передач предотвращается; однако, экономия топлива может ухудшиться. То есть в случае, когда принятое решение о переключении передачи отменяется до достижения числа n принятия решения, переключение передачи более не требуется, и частое переключение передач предотвращается. Между тем, в случае, когда принятие решения о переключении передач периодически выполняется, переключение передач задерживается на число n принятия решения, продолжительность движения на оптимальной ступени передачи сокращается, и, таким образом, экономия топлива снижается. Соответственно, чтобы обеспечить гармонизацию частого переключения передач и экономии топлива, в этом примере осуществления изобретения число n принятия решения назначается для удовлетворения соотношения: интервал 1 переключения передач = интервал 4 переключения передач < интервал 3 переключение передач < интервал 2 переключения передач. В этом примере осуществления изобретения число n принятия решения относится и к включению повышающей передачи и включению понижающей передачи. Однако, число n принятия решения может применяться только к включению понижающей передачи или может применяться только к включению повышающей передачи. Когда число n принятия решения применяется только к включению понижающей передачи, включение повышающей передачи выполняется немедленно при последующем первым принятием решения о переключении передач, и, таким образом, экономия топлива возрастает.
[0068] В дистанционно управляемом режиме движения с автоматическим управлением водитель отсутствует, и нет необходимости рассматривать снижение качества движения, вызываемого частым переключением передач. Соответственно, число n принятия решения в интервале 1 переключения передач может уменьшиться. В этом примере осуществления изобретения число n принятия решения = 0, и команда на переключение передач немедленно выдается в ответ на первое принятие решения о переключении передач. В режиме движения с автоматическим управлением с человеческим участием, водитель присутствует в состоянии, когда он не отслеживает скорость транспортного средства и ускорение. Соответственно, его/ее чувствительность к снижению качества движения, вызываемого частым переключением передач, является наивысшей, и число n принятия решения в интервале 2 переключения передач является наибольшим. В режиме автоматического поддержания скорости движения водитель присутствует в состоянии отслеживания скорости транспортного средства и ускорения. Однако, поскольку водитель не выполняет управление ускорением/замедлением, его/ее чувствительность к снижению качества движения, вызываемого частым переключением передач, является более высокой, чем таковая в режиме движения под управлением водителя. Соответственно, интервал 3 переключения передач назначается так, чтобы на второе по величине число n принятия решения после такового в режиме движения с автоматическим управлением с человеческим участием. В режиме движения под управлением водителя, поскольку сам водитель делает запрос на ускорение/замедление в реальном времени, его/ее чувствительность к снижению качества движения вызываемого частым переключением передач является небольшой. Соответственно, число n принятия решения в интервале 4 переключения передач может быть назначено меньшим, чем таковое в режиме автоматического поддержания скорости движения. В этом примере осуществления изобретения, аналогично интервалу 1 переключения передач, число n принятия решения = 0, и сигнал на переключение передач немедленно выдается в ответ на первое решение о выполнении переключения передач. Фиг. 12 представляет собой один пример временной диаграммы, который показывает зависимость между принятием решения о переключении передачи (прерывистая линия) и выдачей команды на переключение передачи (сплошная линия) во время дистанционно управляемого режима движения с автоматическим управлением и во время режима движения под управлением водителя. Поскольку число n принятия решения в каждом из интервалов 1 и 4 переключения передач равно 0, команда на переключение передачи немедленно выдается в ответ на принятие решения о выполнении переключения передачи, и периодически выполняется включение понижающей передачи, и включение повышающей передачи. Фиг. 13 представляет собой один пример временной диаграммы, который показывает зависимость между принятием решения о переключении передачи (прерывистая линия) и выдачей команды на переключение передачи (сплошная линия) во время режима автоматического поддержания скорости движения, и показывает случай, где число n принятия решения в интервале 3 переключения передач составляет 2. Когда число принятия решения о переключении передачи для включения понижающей передачи или включения повышающей передачи становится равным 2, выдается команда на переключение передачи, и выполняется включение понижающей передачи или включение повышающей передачи. В этом случае частота переключения передач сокращается наполовину по сравнению со случаем с числом n принятия решения = 0, как показано на фиг. 12. Каждая из этих линий переключения передач, показанных на фиг. 12 и фиг. 13, служит в качестве линии включения понижающей передачи и линии включения повышающей передачи, и гистерезиса не возникает. Следует отметить, что число принятия решения о выполнении переключения передач в интервалах 2 и 3 переключения передач в режиме движения с автоматическим управлением с человеческим участием и режиме автоматического поддержания скорости движения может быть равным одинаковой величине.
[0069] На R13 определяется, действительно ли удовлетворено условие выдачи команды на переключение передачи, согласно которому интервалы 1 - 4 переключения передач назначаются на вышеописанных этапах R9-2 -R12-2 в соответствии с режимом движения, то есть, действительно ли число принятия решения о переключении передачи для переключения на целевую ступень Gtag передач достигло числа n принятия решения. Если число принятия решения о переключении передачи достигло числа n принятия решения, выдается команда на переключение передачи для переключения на целевую ступень Gtag передач, и состояния сцепления/расцепления муфт С и тормозов В изменяются. Таким образом, ступень передачи автоматической коробки 16 передач меняется на целевую ступень Gtag передач. В случае, когда принятое решение о переключении передач отменяется до того, как его число достигает числа n принятия решения, команда на переключение передачи не выдается, и процедура ограничения переключения передач заканчивается.
[0070] Фиг. 14 представляет собой блок-схему, которая иллюстрирует еще один аспект блока 68 ограничения переключения передач и отличается от блок-схемы с фиг. 8 тем, что этапы R9-3 - R12-3 представлены вместо R9 -R12. Более конкретно, если на R5 определяется, что выбран дистанционно управляемый режим движения с автоматическим управлением, на R9-3 назначается период 1 ограничения переключения передач. Если на R6 определяется, что выбран режим движения с автоматическим управлением с человеческим участием, на R10-3 назначается период 2 ограничения переключения передач. Если на R7 определяется, что выбран режим автоматического поддержания скорости движения, на R11-3 назначается период 3 ограничения переключения передач. Если на R8 определяется, что выбран режим движения под управлением водителя, на R12-3 назначается период 4 ограничения переключения передач. Каждый из периодов 1-4 ограничения переключения передач представляет собой период, в котором воспрещается беспрерывное переключение передач после переключения передачи. Принятое решение о переключении передачи отменяется, пока не истечет каждый из периодов 1-4 ограничения переключения передач после последнего переключения передачи. После истечения каждого из периодов 1 - 4 ограничения переключения передач, переключение передачи на целевую ступень Gtag передачи в ответ на принятие решения о переключении передач разрешается. Соответственно, когда этот период ограничения переключения передач увеличивается, частое переключение передач предотвращается; однако продолжительность движения на оптимальной ступени передачи сокращается, и, таким образом, экономия топлива может ухудшиться. Таким образом, чтобы обеспечить гармонизацию частого переключения передач и экономию топлива, в этом примере осуществления изобретения периоды 1 -4 ограничения переключения передач назначаются для удовлетворения соотношения: период 1 ограничения переключения передач < период 4 ограничения переключения передач < период 3 ограничения переключения передач < период 2 ограничения переключения передач. В этом примере осуществления изобретения периоды 1-4 ограничения переключения передач применяются и к включению повышающей передачи, и включению понижающей передачи. Однако, периоды 1-4 ограничения переключения передач могут применяться только к включению понижающей передачи или могут применяться только к включению повышающей передачи. Когда периоды 1-4 ограничения переключения передач применяются только к включению понижающей передачи, включение повышающей передачи оперативно выполняется путем последующего принятия решения о переключении передач, и, таким образом, экономия топлива возрастает.
[0071] В дистанционно управляемом режиме движения с автоматическим управлением водитель отсутствует, и нет необходимости рассматривать снижение качества движения, вызываемого частым переключением передач. Соответственно, период 1 ограничения переключения передач может сократиться, и период 1 ограничения переключения передач может также быть назначен равным нулю (может отсутствовать). В режиме движения с автоматическим управлением с человеческим участием водитель присутствует в состоянии отсутствия наблюдения за скоростью транспортного средства и ускорением. Соответственно, его/ее чувствительность к снижению качества движения, вызываемому частым переключением передач, является наивысшей, и период 2 ограничения переключения передач является наиболее длительным из периодов 1-4 ограничения переключения передач. В режиме автоматического поддержания скорости движения водитель присутствует в состоянии наблюдения за скоростью транспортного средства и ускорением. Однако, поскольку водитель не выполняет управление ускорением/замедлением, его/ее чувствительность к снижению качества движения, вызываемому частым переключением передач, является более высокой, чем таковая в режиме движения под управлением водителя. Соответственно, период 3 ограничения переключения передач назначается как второй по длительности период после такового в режиме движения с автоматическим управлением с человеческим участием. В режиме движения под управлением водителя, поскольку сам водитель делает запрос на ускорение/замедление в реальном времени, его/ее чувствительность к снижению качества движения, вызываемому частым переключением передач, является низкой. Соответственно, период 4 ограничения переключения передач назначается более коротким, чем таковой в режиме автоматического поддержания скорости движения. Следует отметить, что периоды 1 и 4 ограничения переключения передач в дистанционно управляемом режиме движения с автоматическим управлением и режиме движения под управлением водителя могут быть назначены равными одинаковой длительности, и периоды 2 и 3 ограничения переключения передач в режиме движения с автоматическим управлением с человеческим участием и режиме автоматического поддержания скорости движения могут быть назначены равными одинаковой длительности.
[0072] На этапе R13 определяется, действительно ли удовлетворено условие выдачи команды на переключение передачи каждого из периодов 1-4 ограничения переключения передач, которые назначены на вышеупомянутых R9-3 - R12-3 в соответствии с режимом движения, то есть, действительно ли время, которое истекло с момента последнего переключения передачи, превышает каждый из периодов 1-4 ограничения переключения передач. Если время, которое истекло с момента последнего переключения передач, превышает каждый из периодов 1-4 ограничения переключения передач, выдается команда на переключение передачи для переключения на целевую ступень Gtag передачи, и состояния сцепления/расцепления муфт С и тормозов В изменяются. Таким образом, ступень передачи автоматической коробки 16 передач меняется на целевую ступень Gtag передачи. Если время, которое истекло с момента последнего переключения передач, не превышает каждый из периодов 1-4 ограничения переключения передач, принятое решение о переключении передач отменяется, команда на переключение передач не выдается, и процедура по ограничению переключения передач заканчивается.
[0073] При этом ограничение переключения передач периодами 1-4 ограничения переключения передач, которые назначаются на этапах R9-3 - R12-3 вышеописанной фиг. 14, может также применяться в сочетании с ограничением переключения передач с помощью задержек 1-4 выдачи команды на переключение передач, которые назначаются на этапах R9 - R12 фиг. 8, или ограничением переключения передач посредством интервалов 1 - 4 переключения передач, которые назначаются на этапах R9-2 - R12-2 фиг. 11. Кроме того, что касается карты переключения передач на приводной стороне, показанной на фиг.7, карта переключения передач, в которой может быть установлена величина гистерезиса, отличающаяся в зависимости от режима движения, и ограничение переключения передач может осуществляться посредством времени задержки выдачи команды на переключение передачи, интервала переключения передачи или периода ограничения переключения передачи. Эти величины времени задержки, интервала переключения передач и периода ограничения переключения передач могут также быть назначены в соответствии с режимом движения.
[0074] Опять же из фиг. 1 видим, когда выбран режим движения с человеческим участием или дистанционно управляемый режим движения с автоматическим управлением, блок 56 рулевого управления управляет автоматической системой 46 рулевого управления для достижения целевого угла Otag поворота, поступающего из блока 60 управления режимом движения с автоматическим управлением. Этот целевой угол Otag поворота подходящим образом назначается в соответствии со скоростью V транспортного средства, движущей силой и т.п., при этом транспортное средство движется по заданному маршруту движения, движется по полосе движения и т.п. или меняет полосу движения, определенную камерой 90, паркуется в гараже или паркуется параллельно на основе информации о местоположении парковки, определенной камерой 90, либо позволяет избежать контакта с пешеходом или препятствием, обнаруженным радаром 88 или камерой 90. На фиг. 15 проиллюстрирована функция приводной системы блока 60 управления режимом движения с автоматическим управлением, а рулевое управление не показано.
[0075] Когда выбран режим движения с человеческим участием или дистанционно управляемый режим движения с автоматическим управлением, блок 58 управления тормозами управляет автоматической тормозной системой 44, при этом каждый из колесных тормозов 38 приводится в действие целевым тормозным усилием Btag, поступающим из блока 60 управления режимом движения с автоматическим управлением. Это целевое тормозное усилие Btag назначается подходящим образом, при этом транспортное средство замедляется с заданным замедлением с помощью блока 116 вычисления целевого расстояния между транспортными средствами, блока 118 вычисления фактического расстояния между транспортными средствами, блока 114 вычисления запаса безопасности скорости транспортного средства, блока 140 вычисления целевого тормозного усилия, и т.п., показанных на фиг. 15, чтобы остановиться в заранее заданном положении остановки, остановиться в соответствии с сигнальной информацией (красным светом), обнаруженной камерой 90 или входным сигналом извне, для обеспечения расстояния между транспортными средствами от предыдущего транспортного средства, определенного радаром 88, или во избежание столкновения с пешеходом или препятствием, обнаруженным радаром 88 или камерой 90. Не только в режиме движения с автоматическим управлением, но и в режиме автоматического поддержания скорости движения, в котором совершается движение с постоянной скоростью или движение с отслеживанием, а также режиме движения под управлением водителя, в котором движущая сила управляется в соответствии с управлением ускорением/замедлением, выполняемым водителем, целевое тормозное усилие Btag назначается при определенном условии, таком как предотвращение столкновения. Таким образом, колесные тормоза 38 могут принудительно приводиться в действие.
[0076] Как показано на фиг. 15, блок 60 управления режимом движения с автоматическим управлением функционально включает в себя блок 110 выработки плана движения и блок 130 управления движением для приводной системы. Блок 110 выработки плана движения включает в себя блок 112 вычисления целевой скорости транспортного средства, блок 114 вычисления запаса безопасности скорости транспортного средства, блок 116 вычисления целевого расстояния между транспортными средствами, а также блок 118 вычисления фактического расстояния между транспортными средствами. Блок 112 вычисления целевой скорости транспортного средства снабжается информацией о местоположении транспортного средства, картографической информацией, которая включает в себя дорогу, градиент, высоту, разрешенную скорость и т.п., информацию об инфраструктуре, а также информацию, которая включает в себя маршрут движения, курс, погоду и пр. из навигационной системы 86. В навигационной системе 86 водителем могут быть установлены пункт назначения, маршрут движения и т.п., а также совместное управление, при котором управление, выполняемое водителем, добавляется к автоматическому управлению, первоочередной приоритет по времени, первоочередной приоритет топливной экономичности, верхняя предельная скорость транспортного средства, желаемая скорость транспортного средства и т.п. Информация об инфраструктуре представляет собой информацию, которая предоставляется из установленного на дороге информационного оборудования связи, содержится в сигнале и т.п. Блок 112 вычисления целевой скорости транспортного средства успешно назначает целевую скорость Vtag1 транспортного средства на основе этих типов информации, и целевая скорость Vtag1 транспортного средства служит базой во время автоматического движения. Этот блок 112 вычисления целевой скорости транспортного средства снабжается значением целевой скорости VtagC транспортного средства во время движения с постоянной скоростью из блока 62 управления режимом автоматического поддержания скорости движения, и он назначает целевую скорость VtagC транспортного средства равной целевой скорости Vtag1 транспортного средства в режиме автоматического поддержания скорости движения.
[0077] Блок 114 вычисления запаса безопасности скорости транспортного средства вычисляет запас Vm безопасности скорости транспортного средства в соответствии с разницей между целевым расстояние Dref между транспортными средствами, которое определяется блоком 116 вычисления целевого расстояния между транспортными средствами, и фактическим расстоянием D между транспортными средствами, которое вычисляется на основе сигнала и т.п. от радара 88 блоком 118 вычисления фактического расстояния между транспортными средствами. Целевая скорость Vtag2 транспортного средства вычисляется вычитанием запаса Vm безопасности скорости транспортного средства из целевой скорости Vtag1 транспортного средства. Каждое из целевого расстояния Dref между транспортными средствами и фактического расстояния D между транспортными средствами является расстоянием между транспортными средствами от предыдущего транспортного средства, при этом расстояние, которое достаточно велико для того, чтобы транспортное средство было способно избежать столкновения с предыдущим транспортным средством, назначается в качестве целевого расстояния Dref между транспортными средствами в соответствии с текущей скоростью V транспортного средства и т.п. Когда фактическое расстояние D между транспортными средствами больше, чем целевое расстояние Dref между транспортными средствами, во избежание ненужного увеличения скорости V транспортного средства, скорость V транспортного средства приводится к более низкому предельному значению с запасом Vm безопасности скорости транспортного средства = 0. Следует отметить, что запас Vm безопасности скорости транспортного средства можно рассчитать не только на основе расстояния от предыдущего транспортного средства, но и на основе расстояний от пешехода, препятствия и транспортного средства на стороне, которая, как предполагается, сместится в положение перед транспортным средством.
[0078] Блок 130 управления движением включает в себя блок 132 вычисления управления с прямой связью (F/F), блок 134 вычисления управления с обратной связью (F/B), блок 136 вычисления сопротивления движению, блок 138 порежимного управления движущей силой, а также блок 140 вычисления целевого тормозного усилия. Блок 132 вычисления управления с прямой связью (F/F) вычисляет величину Fff движущей силы FF, которая требуется для движения транспортного средства с целевой скоростью Vtag2, посредством заранее заданного уравнения управления с прямой связью и т.п. Блок 134 вычисления управления с обратной связью (F/B) вычисляет величину Ffb коррекции обратной связи посредством заранее заданного уравнения управления с обратной связью и т.п. на основе расхождения ΔV между целевой скоростью Vtag2 транспортного средства и текущей скоростью V транспортного средства. Кроме того, блок 136 вычисления сопротивления движению вычисляет сопротивление Fr движению на основе дорожной нагрузки на транспортное средство (R/L), веса транспортного средство (количества пассажиров с водителем и т.п.), наклона дороги и т.п. Далее блок 136 вычисления сопротивления движению вычисляет целевую движущую силу Ftag1 на основе сложения величины Fff движущей силы FF, величины Ffb коррекции обратной связи и сопротивления Fr движению, описанных выше. Дорожная нагрузка может устанавливаться в навигационной системе 86 и т.п. заранее. Однако дорожная нагрузка может быть также загружена через линию связи или может быть вычислена, исходя из фактической движущей силы F, наклона дороги, скорости V транспортного средства и т.п.
[0079] Блок 138 порежимного управления движущей силой корректирует целевую движущую силу Ftag1 в качестве основы в соответствии с режим движения и выполняет обработку сигнала, например, в соответствии с этапами S1 - S12 (далее именуемыми просто S1 - S12) блок-схемы на фиг. 16. Этот блок 138 порежимного управления движущей силой снабжается значением FtagC целевой движущей силы из блока 62 управления режимом автоматического поддержания скорости движения, и также снабжается значением целевой движущей силы FtagM, которое вычисляется на основе величины Асc нажатия педали акселератора, значением скорости V транспортного средства и т.п. из блока 64 управления режимом движения под управлением водителя. Производится вычисление целевой движущей силы FtagC таким образом, что транспортное средство выполняет движение с отслеживанием, поддерживая при этом целевое расстояние DtagC между транспортными средствами. Во время режима автоматического поддержания скорости движения и во время режима движения под управлением водителя эти значения целевой движущей силы FtagC, FtagM назначаются равными целевой движущей силе Ftag1 в качестве основы.
[0080] На этапах S1 - S7 фиг. 16, аналогично Q1 - Q7 на фиг. 5, определяются режимы движения. Результаты этапов Q4 - Q7 могут быть считаны. Если на S4 определяется, что выбран дистанционно управляемый режим движения с автоматическим управлением, на S8 назначается скорость 1 изменения движущей силы. Если на S5 определяется, что выбран режим движения с автоматическим управлением с человеческим участием, на S9 назначается скорость 2 изменения движущей силы. Если на S6 определяется, что выбран режим автоматического поддержания скорости движения, на S10 назначается скорость 3 изменения движущей силы. Если на S7 определяется, что выбран режим движения под управлением водителя, на S 11 назначается скорость 4 изменения движущей силы. Каждая из этих скоростей 1-4 изменения движущей силы назначается для уменьшения изменений в то время, когда целевая движущая сила Ftag2 возрастает. В результате не только изменение движущей силы снижается, но и предотвращается включение понижающей передачи блоком 54 управления ступенчатым переключением передач. Таким образом, этот блок 138 порежимного управления движущей силой также функционирует в качестве блока предотвращения переключения передач.
[0081] Каждая из вышеупомянутых скоростей 1-4 изменения движущей силы определяет максимальную величину скорости изменения (коэффициент изменения) целевой движущей силы Ftag2. Когда вклад водителя в быстроту реагирования (ответа) движущей силы на действие управления уменьшается, быстрота реагирования движущей силы (ответа) на запрос на ускорение требуется в меньшей степени. Соответственно, чтобы в этом примере осуществления изобретения обеспечить гармонизацию экономии топлива и быстроты изменения движущей силы, скорости 1-4 изменения движущей силы назначаются для удовлетворения соотношения:
скорость 1 изменения движущей силы < скорость 2 изменения движущей силы < скорость 3 изменения движущей силы < скорость 4 изменения движущей силы. Каждая из скоростей 1-4 изменения движущей силы имеет положительное значение и ограничивает величину возрастания целевой движущей силы Ftag2, когда целевая движущая сила Ftag2 возрастает. При этом в дистанционно управляемом режиме движения с автоматическим управлением водитель отсутствует, и быстрота изменения движущей силы на запрос на ускорение требуется в меньшей степени. Таким образом, скорость 1 изменения движущей силы может наименьшей из скоростей 1-4 изменения движущей силы с учетом экономии топлива. В режиме движения с автоматическим управлением с человеческим участием, водитель присутствует в состоянии отсутствия наблюдения за скоростью транспортного средства и ускорением. Соответственно, быстрота изменения движущей силы не особенно нужна. Таким образом, скорость 2 изменения движущей силы может низкой с учетом экономии топлива, качества движения, частого переключение передач и т.п. В режиме автоматического поддержания скорости движения, водитель присутствует в состоянии наблюдения за скоростью транспортного средства и ускорением. Однако, поскольку водитель не выполняет управление ускорением/замедлением, скорость 3 изменения движущей силы может выше таковой в режиме движения с автоматическим управлением, однако может быть ниже, чем таковая в режиме движения под управлением водителя, в котором водитель выполняет управление ускорением/замедлением. В режиме движения под управлением водителя, поскольку сам водитель делает запрос на ускорение/замедление в реальном времени, желательна превосходная быстрота изменения движущей силы, и возможности по ограничению скорость 4 изменения движущей силы лимитированы. Фиг. 17 представляет собой временную диаграмму, которая иллюстрирует в качестве примера случай, где изменение целевой движущей силы Ftag1 в качестве основы ограничено скоростью 1 изменения и скоростью 4 изменения. Каждая из этих скоростей 1-4 изменения может иметь постоянное значение (фиксированное значение), однако они могут быть изменены в соответствии с такими условиями движения транспортного средства, как скорость транспортного средства, рабочие условия водителя и т.п., во время запуска двигателя внутреннего сгорания или понижении передачи, например. Следует отметить, что скорость 4 изменения в режиме движения под управлением водителя может также быть неограниченной. Кроме того, скорости 1-3 изменения могут быть назначены равными одной и той же величине.
[0082] На этапе S12 изменение целевой движущей силы Ftag1 в качестве основы ограничено на основе скоростей 1-4 изменения, которые назначаются на вышеуказанных этапах S8 - S11 в соответствии с режимом движения в случае необходимости (сглаживание). Таким образом, вычисляется окончательная целевая движущая сила Ftag2. Далее целевая движущая сила Ftag2 выдается на блок 140 вычисления целевого тормозного усилия и также выдается на блок 52 гибридного управления и блок 54 управления ступенчатым переключением передач.
[0083] Фиг. 18 представляет собой блок-схему, которая иллюстрирует другой аспект блока 138 порежимного управления движущей силой и отличается от блок-схемы на фиг. 16 тем, что вместо S8 - S11 представлены этапы S8-2 - S11-2. Более конкретно, если на S4 определяется, что выбран дистанционно управляемый режим движения с автоматическим управлением, на S8-2 назначается предел 1 движущей силы. Если на S5 определяется, что выбран режим движения с автоматическим управлением с человеческим участием, на S9-2 назначается предел 2 движущей силы. Если на S6 определяется, что выбран режим автоматического поддержания скорости движения, на S10-2 назначается предел 3 движущей силы. Если на S7 определяется, что выбран режим движения под управлением водителя, на S11-2 назначается предел 4 движущей силы. Пределы 1-4 движущей силы предотвращают частое переключение передач и ограничивают верхнюю предельную величину целевой движущей силы Ftag2 на основе линий включения понижающей передачи (линий 1-4 переключения передач на фиг. 6), которые назначаются блоком 66 порежимного определения переключения передач, при этом включение понижающей передачи ограничивается только в период ограничения переключения передач, определяемый с помощью последнего времени время переключения передач в качестве эталона. Когда вклад водителя в быстроту изменения движущей силы при управлении уменьшается, быстрота изменения движущей силы в ответ на запрос на ускорение менее востребована. Соответственно, чтобы обеспечить гармонизацию частого переключения передач и быстроту изменения движущей силы, в этом примере осуществления изобретения пределы 1-4 движущей силы назначаются для удовлетворения соотношения: предел 1 движущей силы > предел 2 движущей силы > предел 3 движущей силы > предел 4 движущей силы. Более конкретно, пределы 1 -3 движущей силы ограничивают целевую движущую силу Ftag2 предельной величиной, чтобы иметь меньшее значение, чем каждая из линий включения понижающей передачи. Период ограничения переключения передач определяется для удовлетворения соотношения: предел 1 движущей силы > предел 2 движущей силы > предел 3 движущей силы. Предел 4 движущей силы может пересекать линии включения понижающей передачи, и их период ограничения переключения передач является наиболее коротким. В то время, как частое переключение передач предотвращается пределами движущей силы во время включения понижающей передачи, включение повышающей передачи, которое связано с уменьшением движущей силы, разрешается как таковое. Таким образом, пределы 1-4 движущей силы имеют значительный эффект для экономии топлива.
[0084] В дистанционно управляемом режиме движения с автоматическим управлением водитель отсутствует, и быстрота изменения движущей силы на запрос на ускорение требуется в меньшей степени. Таким образом, предел 1 движущей силы может представлять собой самый большой из пределов 1-4 движущей силы. В режиме движения с автоматическим управлением с человеческим участием водитель присутствует в состоянии отсутствия наблюдения за скоростью транспортного средства и ускорением. Соответственно, предел 2 движущей силы может быть большим с учетом качества движения, частого переключения передач и т.п. В режиме автоматического поддержания скорости движения водитель присутствует в состоянии наблюдения за скоростью транспортного средства и ускорением. Однако, поскольку водитель не выполняет управление ускорением/замедлением, предел 3 движущей силы может быть меньше, чем таковой в режиме движения с автоматическим управлением, однако может быть больше, чем таковой в режиме движения под управлением водителя. В режиме движения под управлением водителя, поскольку сам водитель делает запрос на ускорение/замедление в реальном времени, желательна превосходная быстрота изменения движущей силы, и возможности по ограничению предела 4 движущей силы лимитированы. Фиг. 19 представляет собой временную диаграмму, которая иллюстрирует в качестве примера случай, где изменение целевой движущей силы Ftag1 в качестве основы ограничено пределом 1 движущей силы и пределом 4 движущей силы. Следует отметить, что предел 4 движущей силы в режиме движения под управлением водителя может не ограничивать верхнее значение целевой движущей силы Ftag2. Кроме того, периоды ограничения переключения передач и предельные значения пределов 1-3 движущей силы могут соответственно быть назначены одинаковыми.
[0085] На этапе S12 изменение целевой движущей силы Ftag1 в качестве основы ограничено на основе пределов 1-4 движущей силы, которые назначаются на вышеописанных этапах S8-2 - S11-2 в режиме движения, когда это необходимо. Таким образом, вычисляется окончательная целевая движущая сила Ftag2. Далее целевая движущая сила Ftag2 выдается на блок 140 вычисления целевого тормозного усилия и также выдается на блок 52 гибридного управления и на блок 54 управления ступенчатым переключением передач.
[0086] Может выполняться либо только ограничение движущей силы пределами 1-4 движущей силы, которые назначаются на S8-2 - S11-2 согласно вышеупомянутой фиг.18, либо только ограничение движущей силы скоростью 1-4 изменения движущей силы, которая назначается на S8 - S11c фиг. 16. Однако оба они могут выполняться в комбинации.
[0087] Опять же из фиг. 15 следует, что, когда целевая движущая сила Ftag2 является отрицательной (минус), блок 140 вычисления целевого тормозного усилия вычисляет целевое тормозное усилие Btag каждого из колесных тормозов 38, посредством которых целевая движущая сила Ftag2 достигается в сочетании с движущей силой торможения, создаваемой блоком 52 гибридного управления, и выдает целевое тормозное усилие Btag на блок 58 управления тормозами. Когда автоматическая тормозная система 44 управляется в соответствии с этим целевым тормозным усилием Btag, каждый из колесных тормозов 38 приводится в действие с помощью целевого тормозного усилия Btag. Таким образом, целевая движущая сила Ftag2 достигается в сочетании с движущей силой торможения, которая достигается с помощью управления, производимого блоком 52 гибридного управления.
[0088] При этом, согласно электронному блоку 50 управления транспортного приводного устройства 10 данного примера осуществления изобретения, выполнение переключения передач предотвращается блоком 68 ограничения переключения передач и блоком 138 порежимного управления движущей силой во время второго режима движения (режима автоматического поддержания скорости движения и режима движения с автоматическим управлением с человеческим участием), по сравнению с первым режимом движения (режимом движения под управлением водителя). Таким образом, частое переключение передач ступени передач автоматической коробки 16 передач во время второго режима движения предотвращается, и достигается превосходное качество движения. Кроме того, как показано на фиг. 6, величина гистерезиса в карте переключения передач меньше во втором режиме движения, чем в первом режиме движения. Таким образом, продолжительность движения на оптимальной ступени передачи увеличивается во время второго режима движения, и экономия топлива возрастает. То есть во втором режиме движения быстрота реагирования движущей силы на управление ускорением/замедлением, как в первом режиме движения, не является необходимой. Соответственно, даже когда переключение передач предотвращается, существует небольшая вероятность того, что, что водитель ощущает дискомфорт. Таким образом, даже когда условие переключения передач назначается для увеличения продолжительности движения на оптимальной ступени передачи путем уменьшения величины гистерезиса условия переключения передач, ожидаемая быстрота изменения движущей силы, ожидаемая водителем, не снижается, и частое переключение передач может быть предотвращено.
[0089] Кроме того, когда блок 138 порежимного управления движущей силой ограничивает скорость изменения или верхнюю предельную величину целевой движущей силы Ftag2, величина возрастания целевой движущей силы Ftag2 во время возрастания больше ограничивается во втором режиме движения, чем в первом режиме движения. Соответственно, во втором режиме движения быстрое изменение движущей силы предотвращается, и качество движения возрастает. Кроме того, включение понижающей передачи, которое связано с возрастанием движущей силы, предотвращается, и возникновение частого переключения передач менее вероятно. Более конкретно, когда блок 138 порежимного управления движущей силой выполняет обработку сигнала в соответствии с блок-схемой с фиг. 16, скорости 2, 3 изменения движущей силы во втором режиме движения ниже, чем скорость 4 изменения движущей силы в первом режиме движения. Таким образом, быстрое изменение движущей силы предотвращается, и качество движения возрастает. Кроме того, включение понижающей передачи, которое связано с возрастанием движущей силы, предотвращается, и возникновение частого переключения передач менее вероятно. Пока движущая сила не достигнет скоростей 2, 3, изменения движущей силы происходят таким же образом, что и в первом режиме движения. Таким образом, обеспечиваются такие же характеристики движущей силы, что и в первом режиме движения.
[0090] Когда блок 138 порежимного управления движущей силой выполняет обработку сигнала в соответствии с блок-схемой на фиг. 18, верхняя предельная величина целевой движущей силы Ftag2 ограничена только в заданный период ограничения переключения передач от последнего переключения передач. В этом случае, верхняя предельная величина целевой движущей силы Ftag2 ограничена меньшей величиной во втором режиме движения, чем в первом режиме движения. Соответственно, включение понижающей передачи предотвращается, и возникновение частого переключения передач менее вероятно. В частности, в этом примере осуществления изобретения в целях ограничения включения понижающей передачи верхняя предельная величина целевой движущей силы Ftag2 ограничена меньшей величиной, чем каждая из линий включения понижающей передачи (линий 1-4 переключения передач на фиг. 6), которые назначаются блоком 66 порежимного определения переключения передач во втором режиме движения. Таким образом, включение понижающей передачи надежно воспрещается в период ограничения переключения передач, и частое переключение передач предотвращается.
[0091] Блок 68 ограничения переключения передач блока 54 управления ступенчатым переключением передач воспрещает переключение передач при определенном условии, когда во втором режиме движения блок 66 порежимного определения переключения передач выполняет принятие решения о переключении передач. Таким образом, частое переключение передач предотвращается. Более конкретно, когда блок 68 ограничения переключения передач выполняет обработку сигнала в соответствии с блок-схемой на фиг. 8, вышеупомянутое определенное условие представляет собой время задержки выдачи команды на переключение передачи. Когда блок 68 ограничения переключения передач выполняет обработку сигнала в соответствии с блок-схемой на фиг. 11, вышеупомянутое определенное условие представляет собой число принятия решения о переключении передач. Когда блок 68 ограничения переключения передач выполняет обработку сигнала в соответствии с блок-схемой на фиг. 14, вышеупомянутое определенное условие представляет собой период ограничения переключения передач. Поскольку эти значения времени задержки, числа принятия решения о переключении передач и периода ограничения переключения передач во втором режиме движения назначаются равными более длинной или большей величине, чем в первом режиме движения, частое переключение передач во втором режиме движения надлежащим образом предотвращается.
[0092] Когда движущая сила ограничена блоком 138 порежимного управления движущей силой в соответствии с блок-схемой на фиг. 16 или фиг. 18, предотвращается только включение понижающей передачи, а включение повышающей передачи разрешается. Таким образом, в то время, как частое переключение передач предотвращается путем предотвращения включения понижающей передачи, экономия топлива может быть повышена путем включения повышающей передачи. Также, достигается сходный эффект в случаях, когда переключение передач ограничено блоком 68 ограничения переключения передач в соответствии с блок-схемой на фиг. 8, фиг. 11, или фиг. 14, и где включение только понижающей передачи ограничивается, в то время как включение повышающей передачи разрешается.
[0093] В качестве второго режима движения используется режим автоматического поддержания скорости движения (режим движения с постоянной скоростью и режим движения с отслеживанием), в котором вклад водителя в управление является относительно большим, а также режим движения с автоматическим управлением, в котором вклад водителя в управление является небольшим. Во время режима движения с автоматическим управлением, в котором вклад водителя в управление является небольшим, принятие решения о переключении передач делается в соответствии с условием переключения передач с меньшей величиной гистерезиса, чем таковая в режиме автоматического поддержания скорости движения, в котором вклад водителя в управление является большим. Соответственно, в режиме движения с автоматическим управлением, в котором вклад водителя в управление является небольшим, продолжительность движения на оптимальной ступени передачи дополнительно увеличивается в то время, как частое переключение передач предотвращается. Таким образом, экономия топлива дополнительно возрастает. То есть в случае режима движения с автоматическим управлением, в котором угол поворота Ф также автоматически управляется, управление движущей силой выполняется путем прогнозирования ситуаций (поворотов, подъемов и спусков, и т.п.) на дороге спереди от текущего положения, и, таким образом, движущая сила меняется более плавно. Таким образом, в то время, как частое переключение передач предотвращается, величина гистерезиса может дополнительно уменьшиться. Вышеупомянутый вклад водителя в управление отличается, например наличием или отсутствием действия рулевого управления, выполняемого водителем, наличием или отсутствием выполняемого водителем действия назначения целевой скорости транспортного средства, наличием или отсутствием выполняемого водителем действия выбора управления с отслеживанием предыдущего транспортного средства и т.п. Когда число действий управления, выполняемых водителем, возрастает, увеличивается вклад водителя в управление.
[0094] Во время режима движения с автоматическим управлением, в котором вклад водителя в управление является небольшим, степень предотвращения переключения передач больше таковой в режиме автоматического поддержания скорости движения, в котором вклад водителя в управление является большим (задержка 2 выдачи команды на переключение передачи > задержка 3 выдачи команды на переключение передачи, интервал 2 переключения передач > интервал 3 переключения передач, период 2 ограничения переключения передач > период 3 ограничения переключения передач, скорость 2 изменения движущей силы < скорость 3 изменения движущей силы, предел 2 движущей силы > предел 3 движущей силы). Соответственно, даже когда величина гистерезиса уменьшается в режиме движения с автоматическим управлением, в котором вклад водителя в управление является небольшим, частое переключение передач надлежащим образом предотвращается. Между тем в режиме автоматического поддержания скорости движения, в котором транспортное средство движется в режиме движения с постоянной скоростью или режиме движения с отслеживанием, степень предотвращения переключения передач является небольшой. Соответственно, превосходная быстрота реагирования движущей силы на таковую в режиме движения с автоматическим управлением достигается переключением передач. Таким образом, может быть обеспечена надлежащая быстрота изменения движущей силы, с тем, чтобы предотвратить изменение скорости транспортного средства и изменение расстояния между транспортными средствами от предыдущего транспортного средства, которое дает чувство дискомфорта водителю.
[0095] Следует отметить, что в вышеописанном примере осуществления изобретения может выполняться либо только управление (фиг. 8, фиг. 11, или фиг. 14), которое ограничивает переключение передач и функционирует в качестве блока предотвращения переключения передач, либо только управление (фиг. 16 или фиг. 18), которое ограничивает движущую силу. Однако, оба типа управления могут одновременно выполняться в сочетании.
[0096] Кроме того, в вышеописанном примере осуществления изобретения было произведено описание транспортного приводного устройства 10, которое имеет блок дифференциала 14 электрического типа и автоматическую коробку 16 передач, которая обеспечивает переключение передач четырех передних ступеней передачи. Однако изобретение может быть применено на различных типах устройств управления транспортным средствами, и, например, изобретение может быть на транспортном приводном устройстве 200, показанном на фиг. 20. Транспортное приводное устройство 200 с фиг. 20 соединено с гибридным транспортным средством, которое включает в себя двигатель 202 внутреннего сгорания и электродвигатель-генератор ЭГ в качестве источников движущей силы, и которое имеет автоматическую коробку 204 передач, способную осуществлять переключение передач восьми передних ступеней передачи. Двигатель 202 внутреннего сгорания соединен с валом 206 электродвигателя электродвигателя-генератора ЭГ посредством муфты сцепления/расцепления К0, и выходная мощность и этого двигателя 202 внутреннего сгорания, и электродвигателя-генератора ЭГ передается с вала 206 электродвигателя на входной вал 222 автоматической коробки 204 передач через преобразователь 208 крутящего момента. Вращение корпуса (направляющего аппарата) 210 преобразователя 208 крутящего момента выборочно останавливается тормозом Bs статора.
[0097] Автоматическая коробка 204 передач включает в себя первую секцию 214 коробки передач и вторую коробку 220 передач на общей оси. Первая секция 214 коробки передач сконфигурирована, чтобы включать в себя первое планетарное редукторное устройство 212 с двойным сателлитом в качестве главного корпуса, и вторая коробка 220 передач сконфигурирована, чтобы включать в себя второе планетарное редукторное устройство 216 с одиночным сателлитом, а также третье планетарное редукторное устройство 218 с двойным сателлитом в качестве главных корпусов. Автоматическая коробка 204 передач изменяет скорость вращения входного вала 222, выдает измененную скорость с выходного вала 224 и вращает приводы правого и левого ведущих колес через конечный редуктор, который не показан, и т.п. Второе планетарное редукторное устройство 216 и третье планетарное редукторное устройство 218 составляют планетарную зубчатую передачу типа Равиньо, в которой как водило, так и кольцевая шестерня выполнены из общего элемента, и в которой сателлит второго планетарного редукторного устройства 216 также служит в качестве второго сателлита (внешнего сателлита) третьего планетарного редукторного устройства 218. Эта автоматическая коробка 204 передач снабжена четырьмя муфтами С1-С4 сцепления и двумя тормозами B1, B2 (далее именуемыми просто муфтами С и тормозами В, когда в них нет особых признаков) в качестве гидравлических устройств фрикционного сцепления. Как показано в таблице срабатывания сцепления на фиг. 21, когда задействованы любые два элемента из этих муфт С и тормозов В, формируются восемь передних ступень ступеней передачи с 1-ой по 8-ю и две задних ступени Rev1, Rev2 передачи. Когда все муфты С и тормоза В расцепляются, устанавливается N (нейтраль), в которой передача мощности прерывается.
[0098] Также с таким транспортным приводным устройством 200 транспортное средство может двигаться в режиме движения под управлением водителя, в режиме автоматического поддержания скорости движения, в режиме движения с автоматическим управлением с человеческим участием, а также в дистанционно управляемом режиме движения с автоматическим управлением, когда оно оснащено контроллером 40 выхода двигателя внутреннего сгорания, контуром 42 управления гидросистемы, автоматической тормозной системой 44, автоматической системой 46 рулевого управления, электронным блоком 50 управления, и т.п. Кроме того, рабочие результаты, сходные с таковыми результатами для примера осуществления изобретения, достигаются, когда управление переключением передач и управление движущей силой выполняются в режиме движения блоком 54 управления ступенчатым переключением передач и блоком 138 порежимного управления движущей силой.
[0099] Выше было произведено подробное описание примера осуществления изобретения на основе чертежей. Однако это всего лишь один пример осуществления, и изобретение может быть реализовано в объектах путем внесения различных изменений и усовершенствований на основе знаний специалиста в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2668448C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2503559C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2671593C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2499705C2 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2518144C2 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2632390C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2705867C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2557103C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2555382C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2648504C2 |
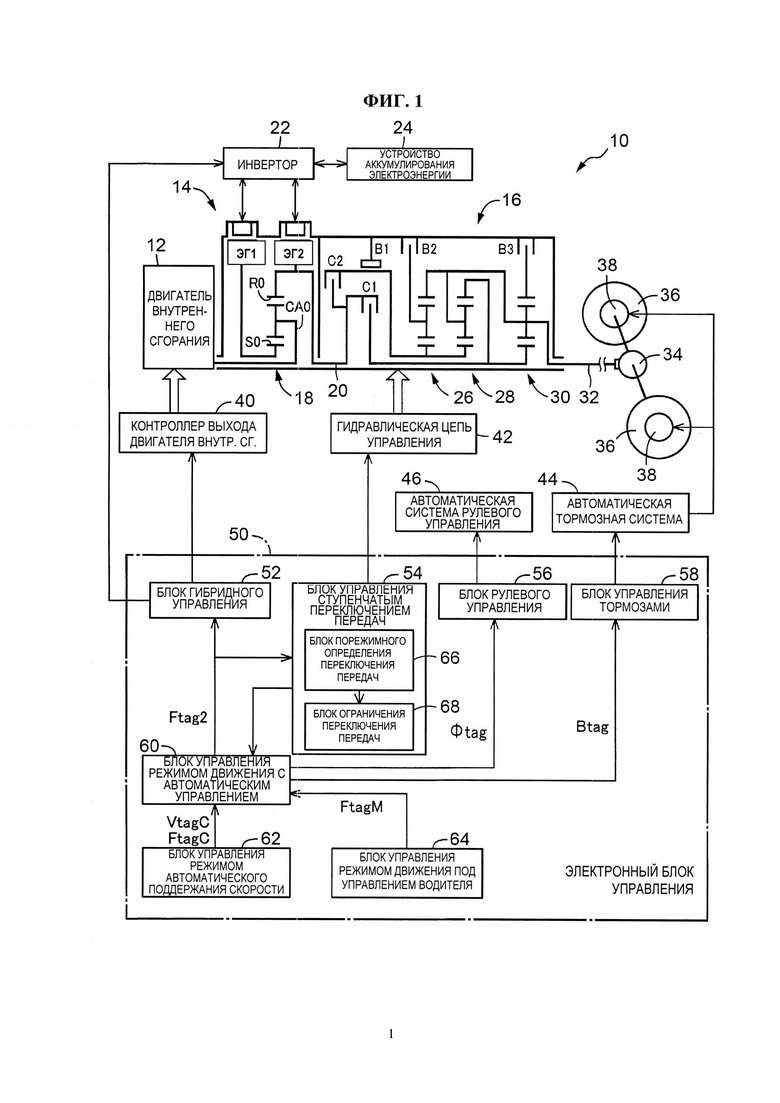
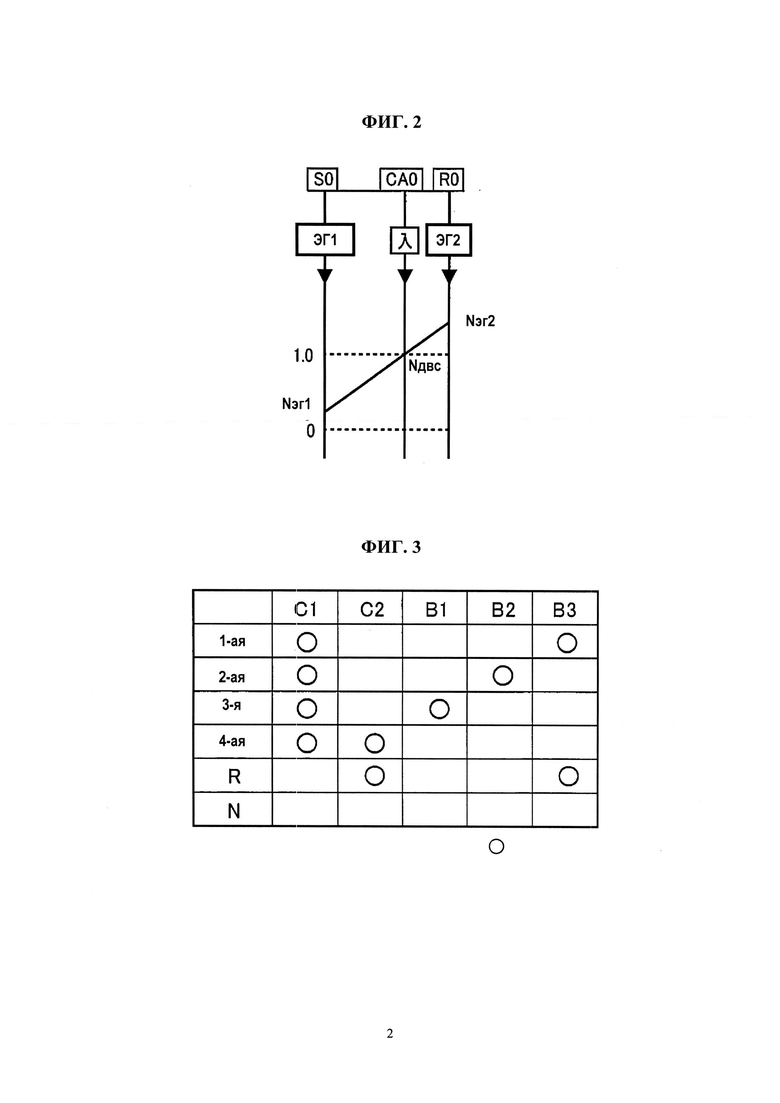
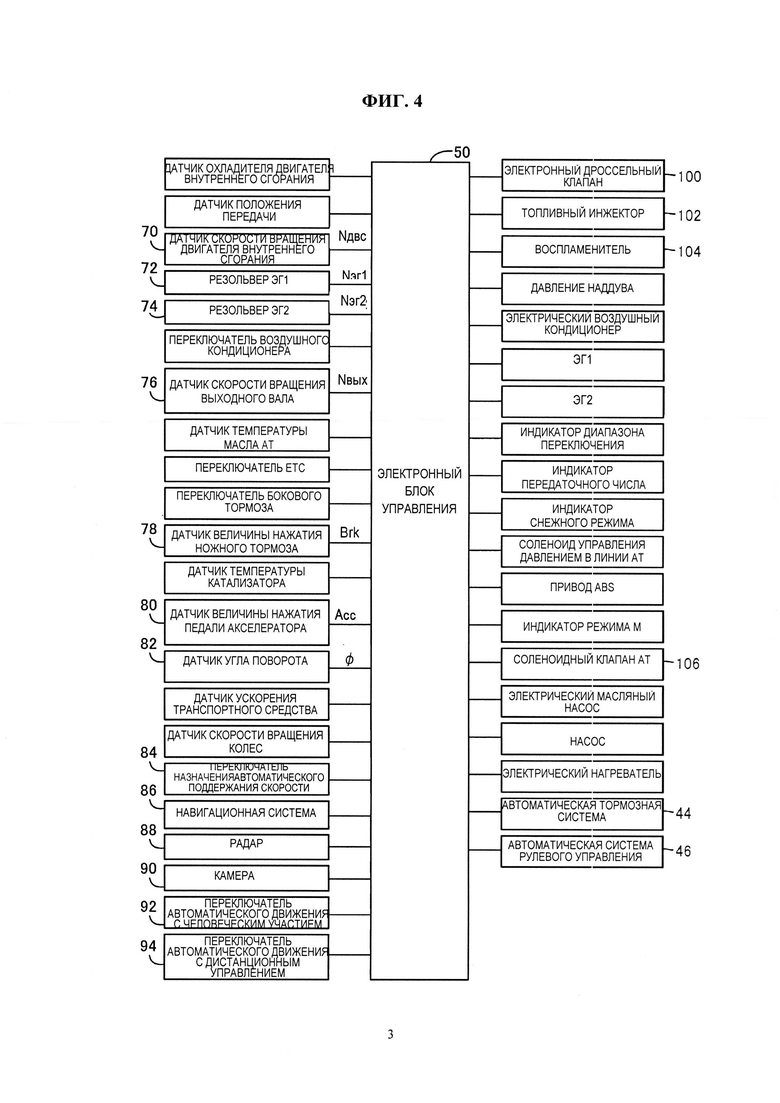
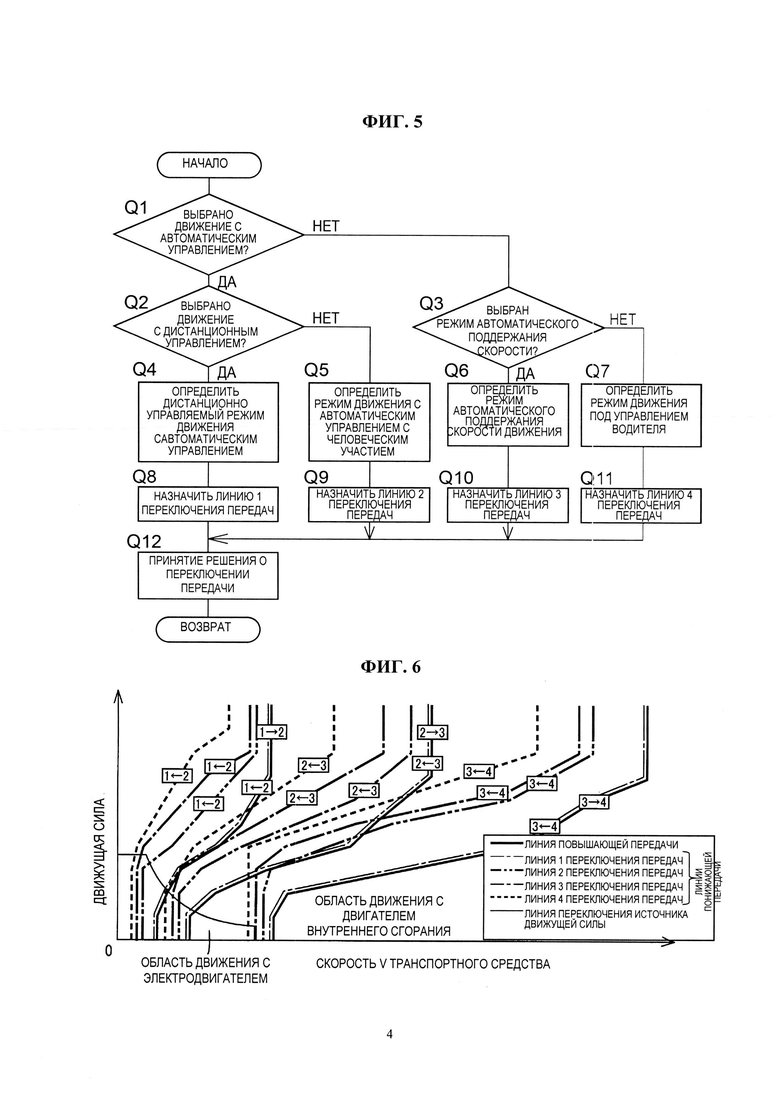
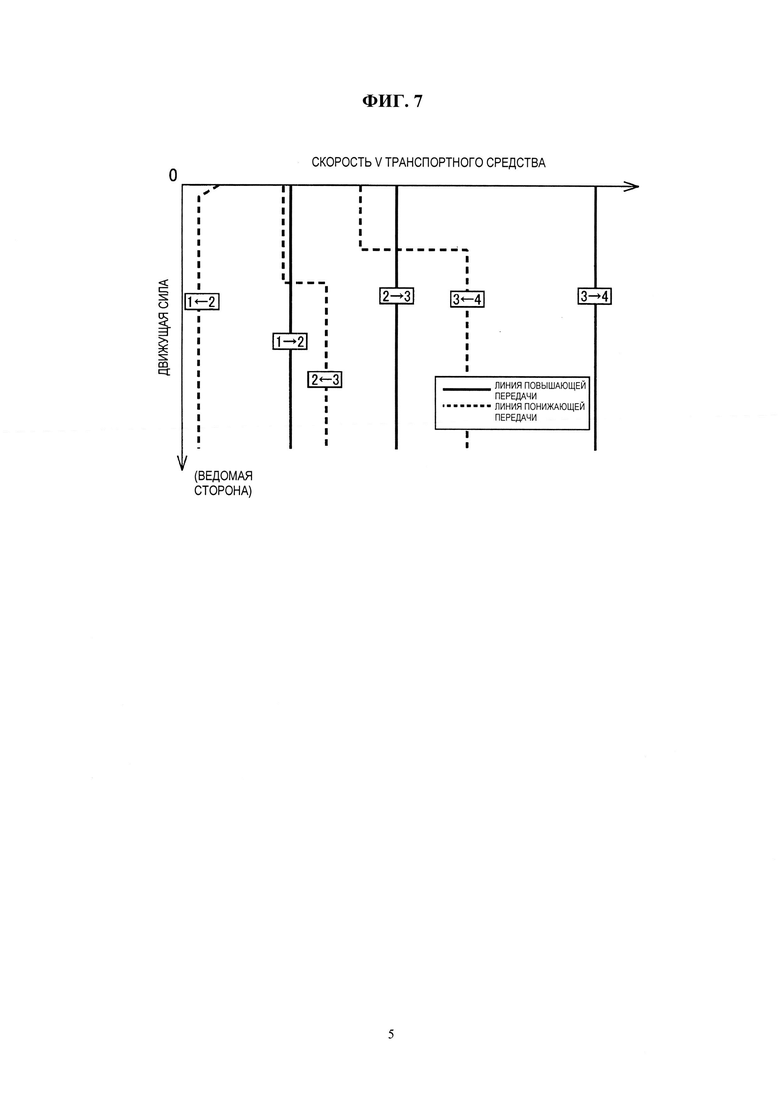
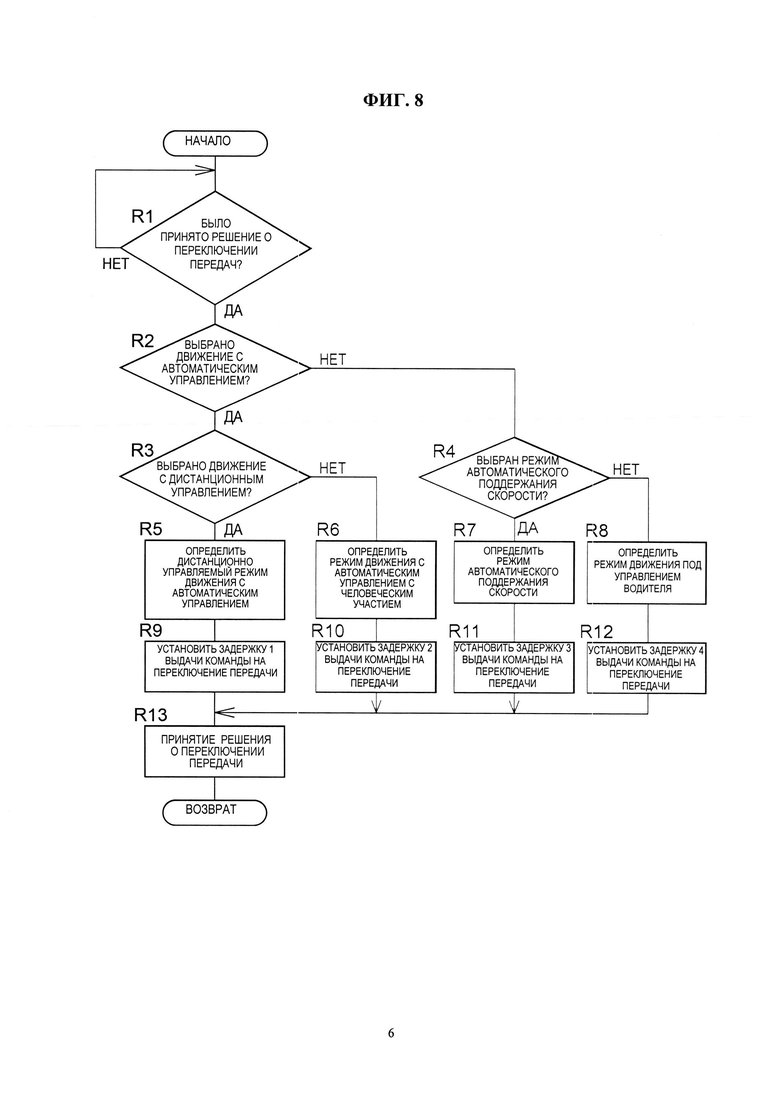
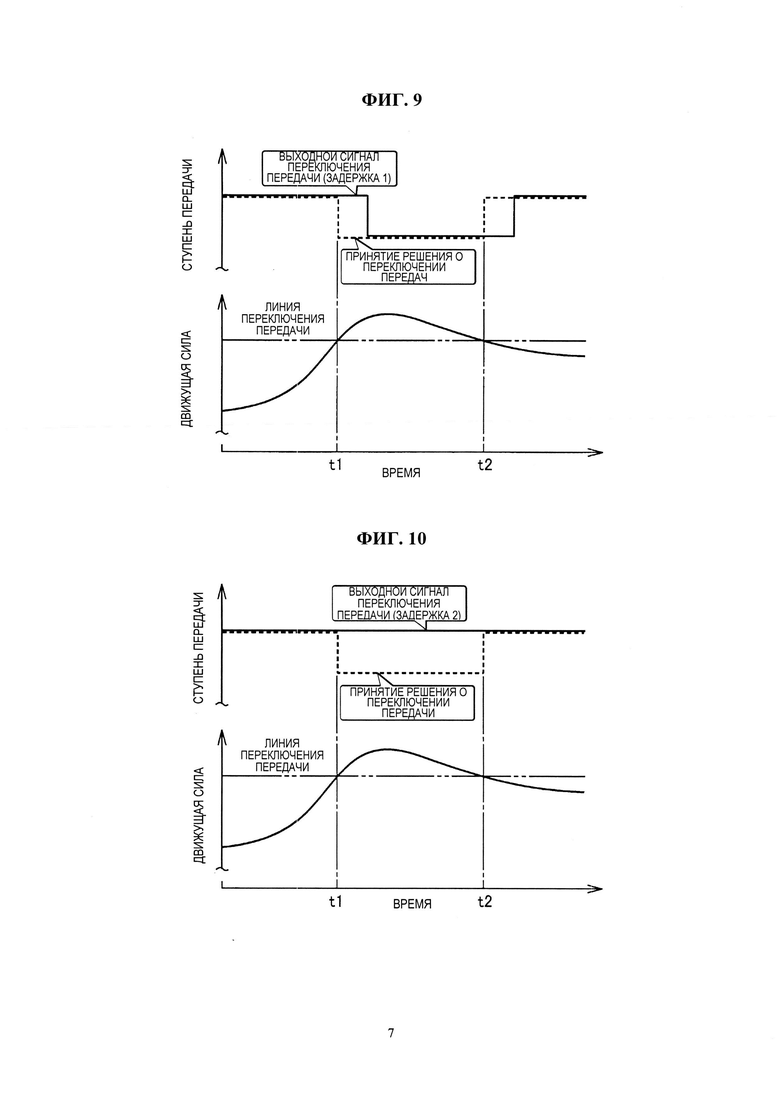
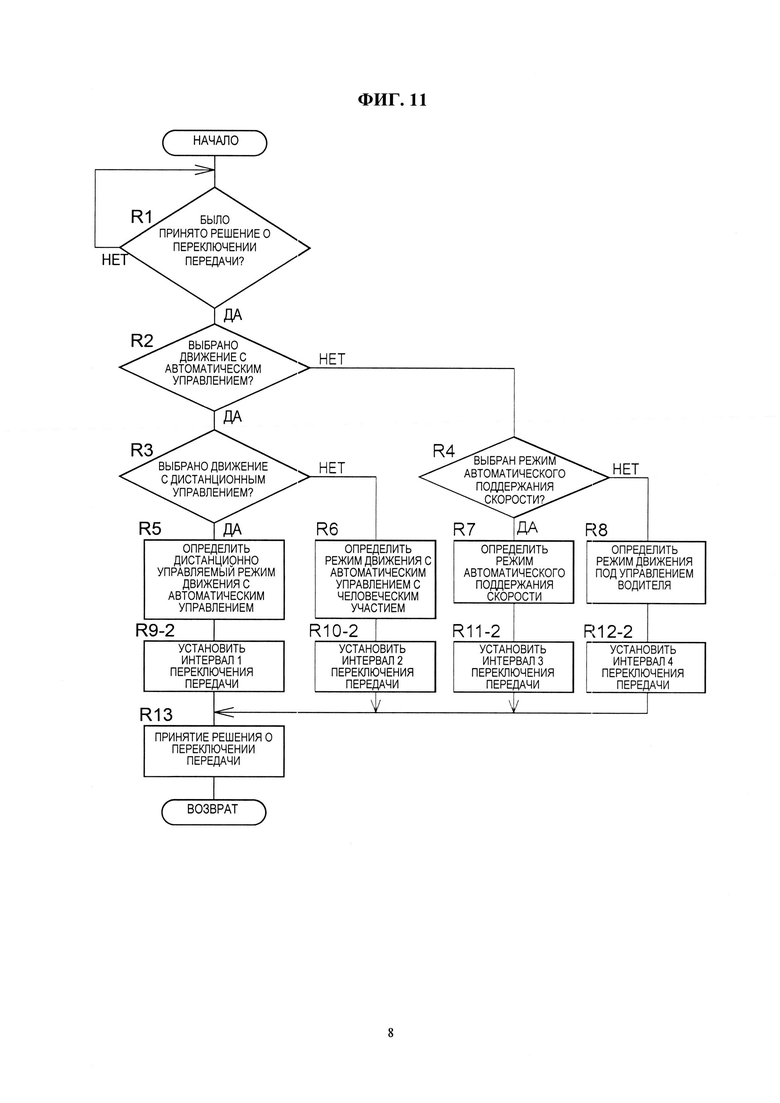
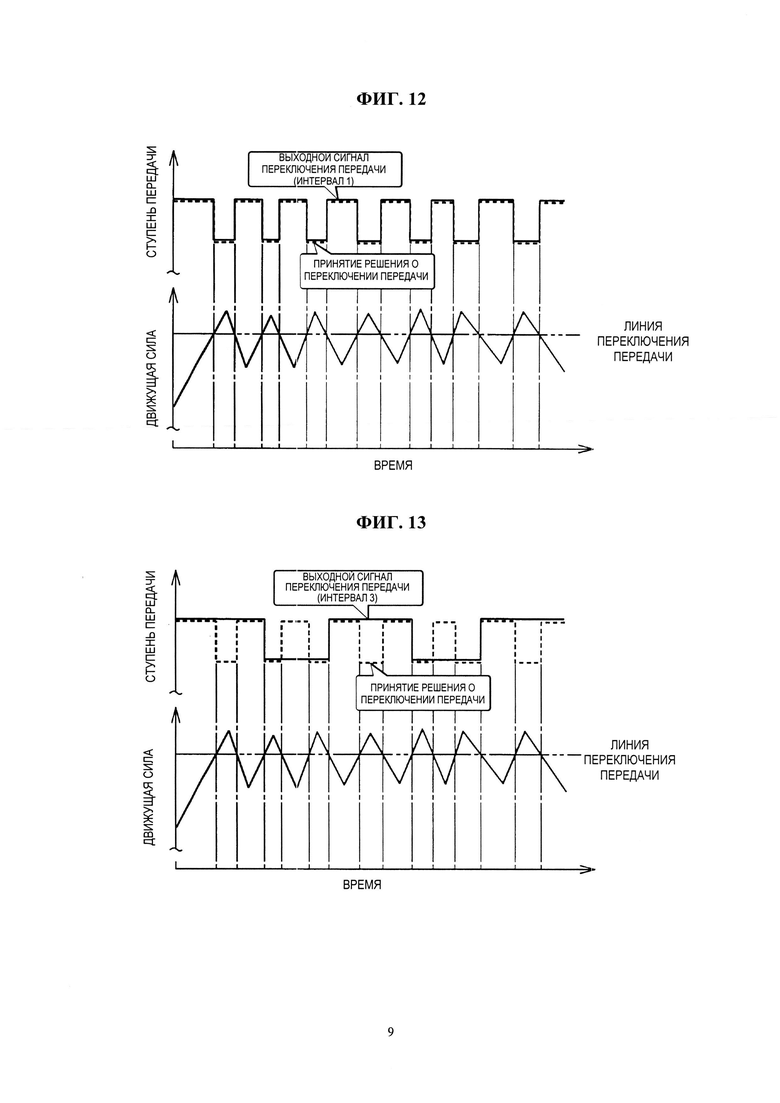
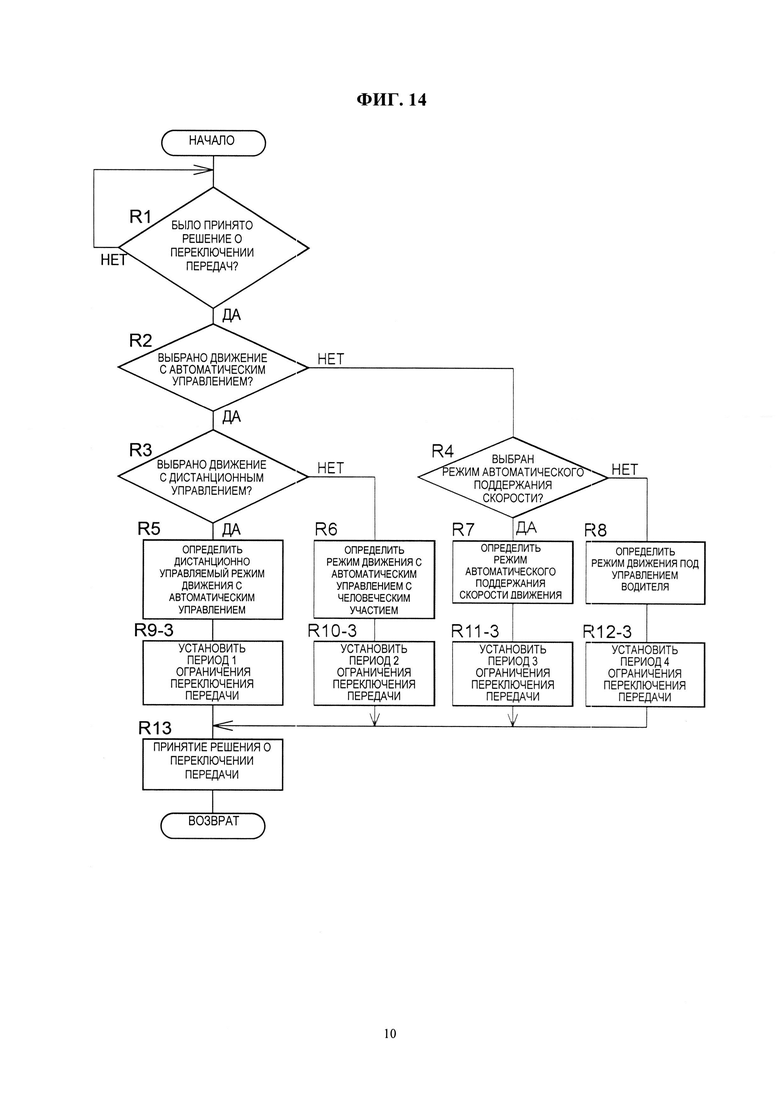
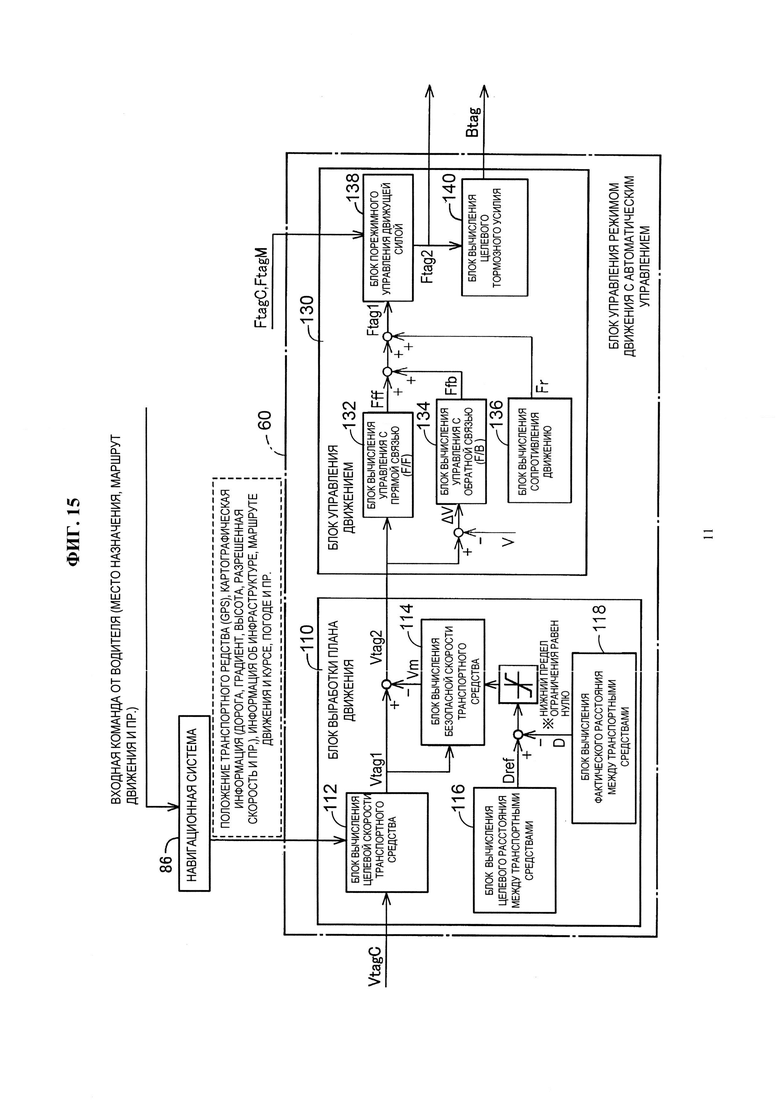
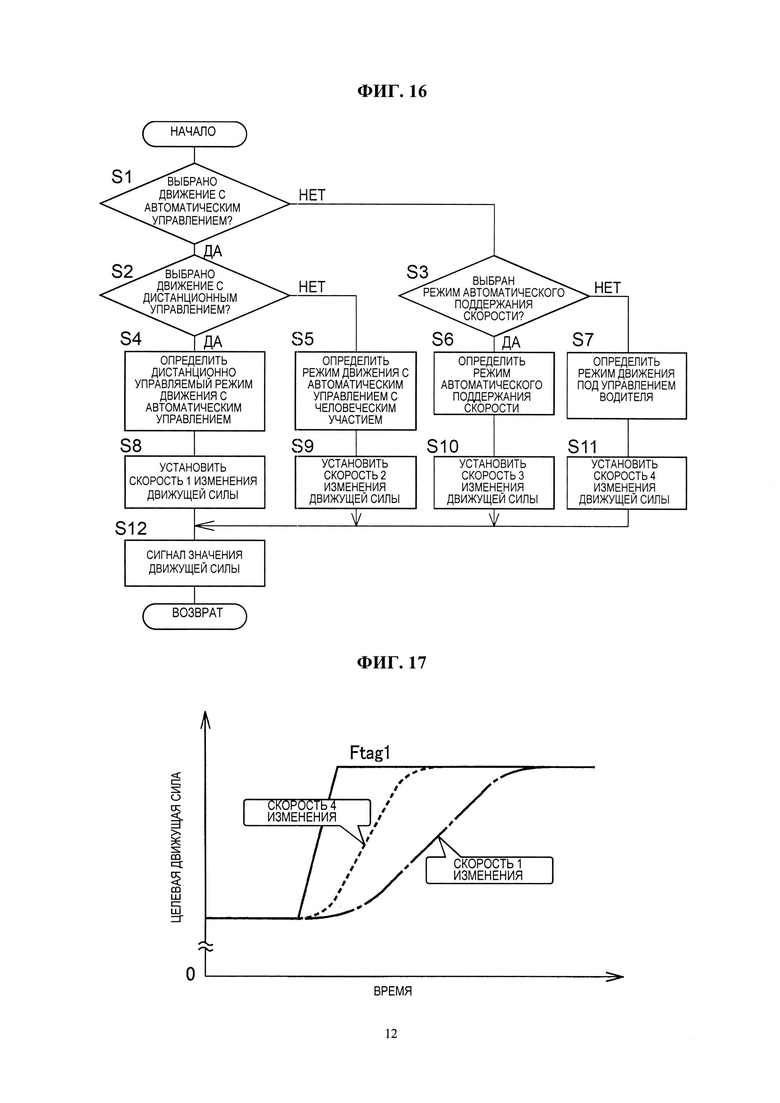
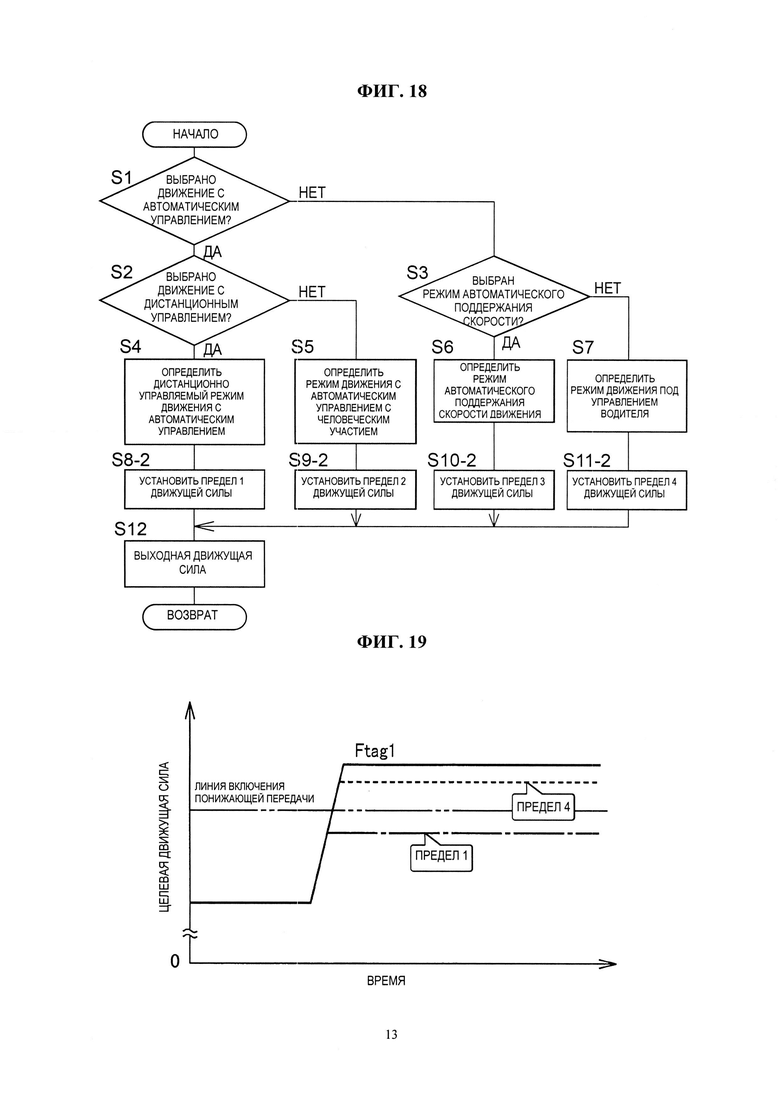
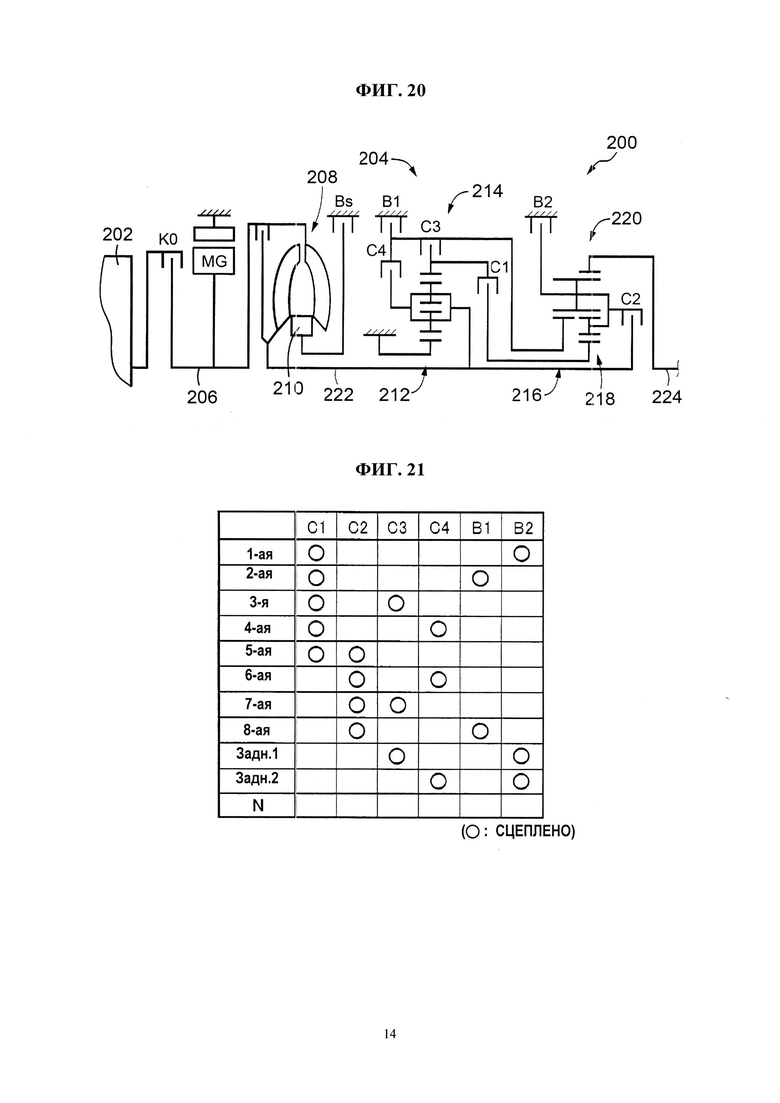
Изобретение относится к транспортным средствам. Транспортное средство содержит источник движущей силы, автоматическую коробку передач и электронный блок управления (ЭБУ) для выполнения первого и второго режима движения. В первом режиме управление движущей силой и переключение передач происходит по запросу водителя. Во втором режиме целевое состояние движения назначается независимо от запроса водителя, при этом выполняется управление движущей силой и переключение передач. Условием переключения передач является условие включения повышающей передачи и понижающей передачи. Величина гистерезиса между условием включения повышающей и понижающей передачи в первом режиме движения отлична от величины гистерезиса во втором режиме. ЭБУ переключает передачи относительно того, выполнять ли переключение передач во втором режиме движения с меньшей величиной гистерезиса, чем величина гистерезиса в первом режиме. ЭБУ предотвращает переключение передач при условии включения повышающей либо понижающей передачи в более существенной степени во втором режиме движения, чем в первом режиме. Повышается экономия топлива. 2 н. и 15 з.п. ф-лы, 21 ил.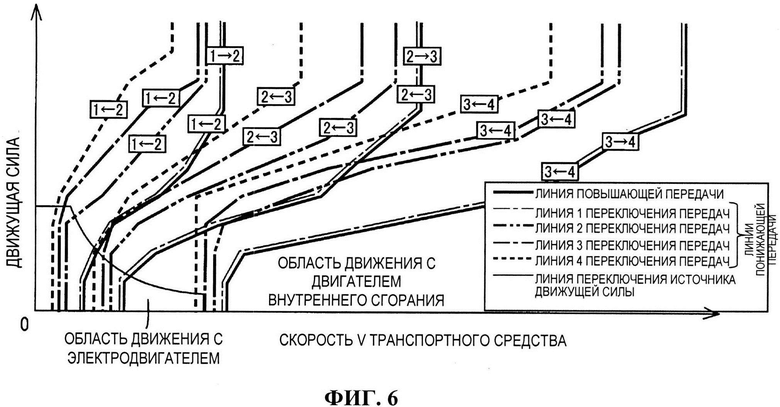
1. Транспортное средство, содержащее:
источник движущей силы;
автоматическую коробку передач, сконфигурированную для формирования множества ступеней передач, при этом каждая ступень из множества ступеней передач имеет свое передаточное число; и
электронный блок управления, сконфигурированный для выполнения первого режима движения и второго режима движения,
при этом первый режим движения представляет собой режим, в котором управление движущей силой и управление переключением передач автоматической коробки передач выполняются в соответствии с осуществляемым водителем управлением ускорением и замедлением, а второй режим движения представляет собой режим, в котором целевое состояние движения назначается независимо от управления ускорением и замедлением в состоянии присутствия водителя в транспортном средстве и в котором выполняются управление движущей силой и управление переключением передач,
в качестве условия переключения передач для управления переключением передач определяют условие включения повышающей передачи и условие включения понижающей передачи, основанные на параметре, связанном с движущей силой, а также параметре, связанном со скоростью транспортного средства,
величина гистерезиса между заданным условием включения повышающей передачи и заданным условием включения понижающей передачи в первом режиме движения отличается от величины гистерезиса во втором режиме движения,
при этом электронный блок управления сконфигурирован для принятия решения о переключении передачи относительно того, выполнять ли переключение передач во втором режиме движения в соответствии с условием переключения передач с меньшей величиной гистерезиса, чем величина гистерезиса в первом режиме движения, и
электронный блок управления сконфигурирован для предотвращения переключения передач, по меньшей мере, либо при условии включения повышающей передачи, либо при условии включения понижающей передачи в более существенной степени во втором режиме движения, чем в первом режиме движения.
2. Транспортное средство по п. 1, в котором
электронный блок управления сконфигурирован для предотвращения переключения передач путем ограничения величины возрастания движущей силы в заданный промежуток времени в более существенной степени во втором режиме движения, чем в первом режиме движения,
при этом заданный промежуток времени представляет собой промежуток времени, в котором движущая сила возрастает.
3. Транспортное средство по п. 2, в котором
электронный блок управления сконфигурирован, чтобы делать верхний предел скорости изменения движущей силы в заданный промежуток времени во втором режиме движения меньше, чем верхний предел скорости изменения движущей силы в заданный промежуток времени в первом режиме движения.
4. Транспортное средство по п. 1, в котором
электронный блок управления сконфигурирован, чтобы делать верхнюю предельную величину движущей силы в период ограничения переключения передач во втором режиме движения меньше, чем верхняя предельная величина движущей силы в первом режиме движения,
при этом период ограничения переключения передач является заранее заданным периодом после выполнения переключения передачи.
5. Транспортное средство по п. 4, в котором
электронный блок управления сконфигурирован для ограничения верхней предельной величины движущей силы в диапазоне, где текущая ступень передачи может быть установлена на основе условия переключения передач во втором режиме движения.
6. Транспортное средство по п. 1, в котором
электронный блок управления сконфигурирован, чтобы осуществлять переключение передачи во втором режиме движения на основе особого условия, когда электронный блок управления принимает решение выполнить переключение передач.
7. Транспортное средство по п. 6, в котором
электронный блок управления сконфигурирован, чтобы не осуществлять переключение передачи, пока не истечет время задержки,
при этом время задержки представляет собой промежуток времени, в течение которого электронный блок управления не выдает команду на переключение передачи, после того как электронный блок управления примет решение выполнить переключение передачи, и
время задержки во втором режиме движения больше, чем время задержки в первом режиме движения.
8. Транспортное средство по п. 6, в котором
электронный блок управления сконфигурирован, чтобы не осуществлять переключение передачи, пока число принятия решения не достигнет заданного числа принятия решения,
при этом число принятия решения является числом, при котором электронный блок управления принимает решение выполнить переключение передачи, и
заданное число принятия решения во втором режиме движения больше, чем заданное число принятия решения в первом режиме движения.
9. Транспортное средство по п. 6, в котором
электронный блок управления сконфигурирован, чтобы в период ограничения переключения передач не осуществлять переключение передачи, когда электронный блок управления принимает решение выполнить переключение передачи,
при этом период ограничения переключения передач во втором режиме движения больше, чем период ограничения переключения передач в первом режиме движения.
10. Транспортное средство по п. 1, в котором
электронный блок управления сконфигурирован, чтобы предотвратить только включение понижающей передачи при выполнении условия включения понижающей передачи и разрешить включение повышающей передачи при выполнении условия включения повышающей передачи.
11. Транспортное средство по п. 1, в котором
второй режим движения включает в себя множество режимов движения, в которых вклад водителя в управление отличается, и
электронный блок управления сконфигурирован, чтобы принимать решения о переключении передачи в соответствии с условием переключения передач с меньшей величиной гистерезиса в первый заданный промежуток времени, чем величина гистерезиса во второй заданный промежуток времени,
при этом первый заданный промежуток времени представляет собой промежуток времени во втором режиме движения, в котором вклад водителя в управление является небольшим, и
второй заданный промежуток времени представляет собой промежуток времени во втором режиме движения, в котором вклад водителя в управление является большим.
12. Транспортное средство по п. 11, в котором
электронный блок управления сконфигурирован для увеличения степени предотвращения переключения передач, чтобы она была больше в первом заданном промежутке времени, чем во втором заданном промежутке времени.
13. Транспортное средство по п. 1, в котором
второй режим движения включает в себя режим движения с постоянной скоростью и режим движения с автоматическим управлением,
режим движения с постоянной скоростью представляет собой режим, в котором транспортное средство движется с назначенной водителем целевой скоростью транспортного средства, являющейся целевым состоянием движения, и в котором водитель управляет углом поворота, и
режим движения с автоматическим управлением представляет собой режим, в котором, в дополнение к управлению движущей силой и управлению переключением передач, транспортное средство движется путем автоматического управления углом поворота на основе информации о ситуации на дороге, и
электронный блок управления сконфигурирован, чтобы в режиме движения с автоматическим управлением принимать решение о переключении передачи в соответствии с условием переключения передач с меньшей величиной гистерезиса, чем величина гистерезиса в режиме движения с постоянной скоростью.
14. Транспортное средство по п. 13, в котором
электронный блок управления сконфигурирован для увеличения степени предотвращения переключения передач, чтобы она была больше в режиме движения с автоматическим управлением, чем в режиме движения с постоянной скоростью.
15. Транспортное средство по п. 1, в котором
второй режим движения включает в себя режим движения с отслеживанием и режим движения с автоматическим управлением,
при этом режим движения с отслеживанием представляет собой режим, в котором вычисляется целевая движущая сила, которая позволяет транспортному средству выполнять движение с отслеживанием по отношению к предыдущему транспортному средству, в котором транспортное средство движется с целевой движущей силой, являющейся целевым состоянием движения, и в котором водитель управляет углом поворота, и
режим движения с автоматическим управлением представляет собой режим, в котором, в дополнение к управлению движущей силой и управлению переключением передач, транспортное средство движется путем автоматического управления углом поворота на основе информации о ситуации на дороге, и
электронный блок управления сконфигурирован, чтобы в режиме движения с автоматическим управлением принимать решение о переключении передачи в соответствии с условием переключения передач с меньшей величиной гистерезиса, чем величина гистерезиса в режиме движения с отслеживанием.
16. Транспортное средство по п. 15, в котором
электронный блок управления сконфигурирован для увеличения степени предотвращения переключения передач, чтобы она была больше в режиме движения с автоматическим управлением, чем в режиме движения с отслеживанием.
17. Способ управления переключением передач в автоматической трансмиссии транспортного средства,
при этом транспортное средство включает в себя источник движущей силы, автоматическую коробку передач и электронный блок управления,
причем автоматическая коробка передач сконфигурирована для формирования множества ступеней передач, при этом каждая ступень из множества ступеней передач имеет свое передаточное число,
при этом способ управления включает в себя:
выполнение посредством электронного блока управления первого режима движения и второго режима движения;
выполнение посредством электронного блока управления принятия решения о переключении передачи, относительно того, выполнять ли переключение передачи во втором режиме движения в соответствии с условием переключения передач с меньшей величиной гистерезиса, чем величина гистерезиса первого режима движения; и
предотвращение электронным блоком управления переключения передачи, по меньшей мере, либо при условии включения повышающей передачи, либо при условии включения понижающей передачи в более существенной степени во втором режиме движения, чем в первом режиме движения,
при этом первый режим движения представляет собой режим, в котором управление движущей силой и управление переключением передач автоматической коробки передач выполняются в соответствии с осуществляемым водителем управлением ускорением или замедлением, а второй режим движения представляет собой режим, в котором целевое состояние движения назначается независимо от управления ускорением или замедлением в состоянии присутствия водителя в транспортном средстве и в котором выполняются управление движущей силой и управление переключением передач,
в качестве условия переключения передач для управления переключением передач определяют условие включения повышающей передачи и условие включения понижающей передачи, основанные на параметре, связанном с движущей силой, а также параметре, связанном со скоростью транспортного средства,
величина гистерезиса между заданным условием включения повышающей передачи и заданным условием включения понижающей передачи в первом режиме движения отличается от величины гистерезиса во втором режиме движения.
| DE 102009019795 A1, 04.11.2010 | |||
| JP 2008128452 A, 05.06.2008 | |||
| US 2002069009 A1, 06.06.2002 | |||
| DE 102006042419 A1, 27.03.2008 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2555394C1 |

