Описываемое предлагаемое изобретение относится к способам управления подводными аппаратами.
В качестве подводных аппаратов далее рассматриваются управляемые автономно или дистанционно подводные средства, запускаемые с носителя (надводного корабля, подводной лодки или берегового пункта) и выполняющие определенные функции, например, поиск объектов, находящихся в море (на дне, в толще воды или на поверхности), сближение с ними и физическое воздействие на них.
Известна система телеуправления (СТУ) торпедой, включающая гидроакустический комплекс (ГАК) корабля, уточняющий местонахождение цели и торпеды, проводная линия связи корабля с торпедой и приборы управления, формирующие сигналы управления торпедой на траектории ([1], с. 72). Система телеуправления ПА включает канал контроля цели, канал контроля ПА и канал управления ПА ([2], с. 169-173).
Недостатком существующих СТУ ПА является их низкая защищенность от возможности срыва телеуправления в условиях активных действий корабля, ПА или цели. Так, обязательным условием правильного функционирования СТУ ПА является своевременное получение ГАК корабля данных о местоположениях цели и ПА, которое в любой момент времени может быть нарушено в результате маневров корабля, ПА или цели, а также в случаях, когда цель применяет оружие, приборы помех или другие средства для отрыва от корабля. Наличие в СТУ проводной линии связи между носителем и ПА существенно ограничивает маневрирование носителя из-за возможности ее обрыва и потери управления ПА.
Для контроля цели и ПА используют известные виды энергии, излучаемые или отражаемые целью и ПА. Контроль объектов, находящихся в воде и механически не связанных с пунктом управления, производят с учетом возможностей известных энергетических каналов связи с применением оптических, электронно-оптических, лазерных или гидроакустических средств. В настоящее время наибольшее распространение получили гидроакустические средства, обладающие наилучшими характеристиками по передаче энергии в водной среде.
По данным контроля цели и ПА в системе телеуправления ПА вырабатывают команды, которые автоматически или с помощью оператора передают на ПА. В канале управления ПА используют проводные или кабельные, радиотехнические, оптические или лазерные, гидравлические и гидроакустические линии связи, каждая из которых имеет свои сильные и слабые стороны. Так, радиотехническая линия связи обеспечивает большую дальность действия в воздухе. Проводная линия связи является наиболее помехоустойчивой, но конструктивно более сложной, поэтому ее используют совместно с гидравлической. Оптические или лазерные линии связи, также как и гидроакустические, имеют в водной среде небольшую дальность действия. Для повышения помехозащищенности канала управления передаваемые команды зашифровывают или кодируют, для чего на пункте управления (ПУ) перед передатчиком устанавливают кодирующее устройство или шифратор, а на ПА - декодирующее устройство или дешифратор.
Известна СТУ ПА, в состав которой входят [3]:
- каналы контроля цели, ПА и других источников информации, в качестве которых могут использоваться радиогидроакустические буи (РГБ), реактивные РГБ [4], реактивные снаряды со взрывным источником звука (PC ВИЗ) [5], а также буи-ретрансляторы, основным элементом канала контроля является ГАК корабля;
- канал управления ПА, включающий буй-ретранслятор, выпускаемый с корабля одновременно с ПА, имеющий положительную плавучесть и обеспечивающий управление ПА с помощью проводной или кабельной и/или гидравлической линий связи.
Дополнительные источники информации и буй-ретранслятор оборудуют устройствами, облегчающими их контроль на корабле. Это радио- или гидроакустические маячки.
Данная СТУ ПА, в отличие от рассмотренной выше, не сковывает носитель в маневрах при управлении ПА и позволяет ему более эффективно решать сопутствующие задачи. Так, надводный корабль (НК), оснащенный подобной СТУ может свободно маневрировать для обхода навигационных опасностей, уклонения от столкновения с опасными предметами или от оружия противника. Однако недостатком такой СТУ является малая вероятность наведения ПА на цель, если цель своевременно обнаруживает ПА и пытается его уничтожить или отвести от себя с' помощью средств радиоэлектронного подавления (РЭП).
Целью изобретения является разработка способа управления ПА, обеспечивающего свободу маневра НК и одновременно возможность эффективного наведения на выбранную цель выпущенного с НК ПА.
Поставленная цель достигается благодаря тому, что предлагается способ управления подводным аппаратом, заключающийся в том, что:
- выпущенный с НК ПА наводят на цель под управлением его бортовой системы управления (БСУ) или по командам СТУ ПА с учетом известных данных о местонахождении цели и ПА,
- при сближении ПА с целью на дальность действия его системы обнаружения цели (СОЦ) подают команду на ее включение и переводят ПА в режим поиска цели,
- с обнаружением цели передают информацию с ПА на НК через буй-ретранслятор, где производят классификацию контакта, осуществляют целераспределение и наводят ПА на выбранную оператором цель,
- если целераспределение оператором не производится, его осуществляют в БСУ ПА,
- СОЦ ПА следующего включают в активный режим как можно ближе к цели для предотвращения его раннего обнаружения и оказания своевременного противодействия со стороны цели,
- между ПА и кораблем осуществляют взаимный обмен информацией о местонахождении обнаруженных подводных объектов.
О соответствии предложенного технического решения критерию «существенные отличия» свидетельствуют сведения, приведенные в таблице 1.
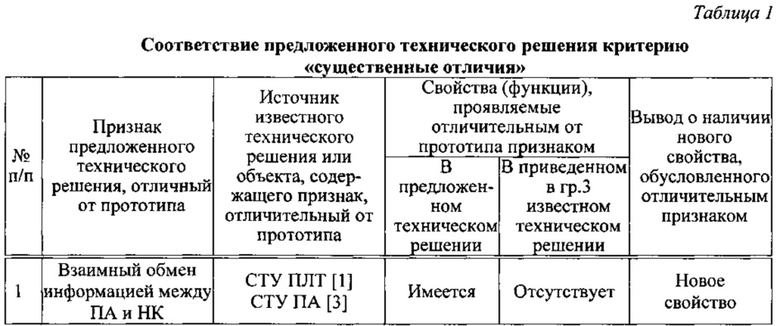
Предложенное техническое решение соответствует критерию «существенные отличия», так как ни один из отличительных признаков в известном устройстве не обнаружен.
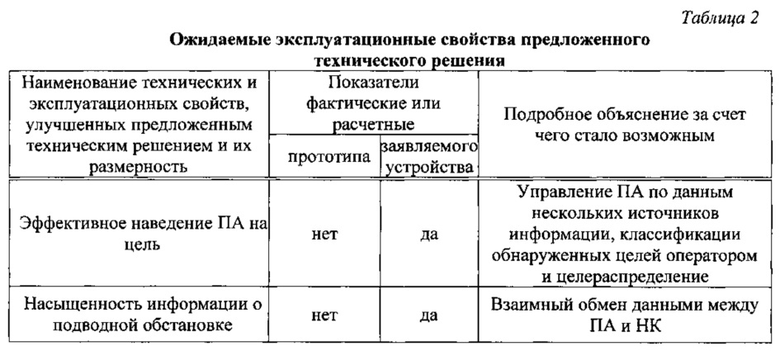
Достижение положительного эффекта при осуществлении предложенного устройства подтверждается сведениями, приведенными в таблице 2.
Техническое осуществление предложенного способа поясняется чертежами, на которых:
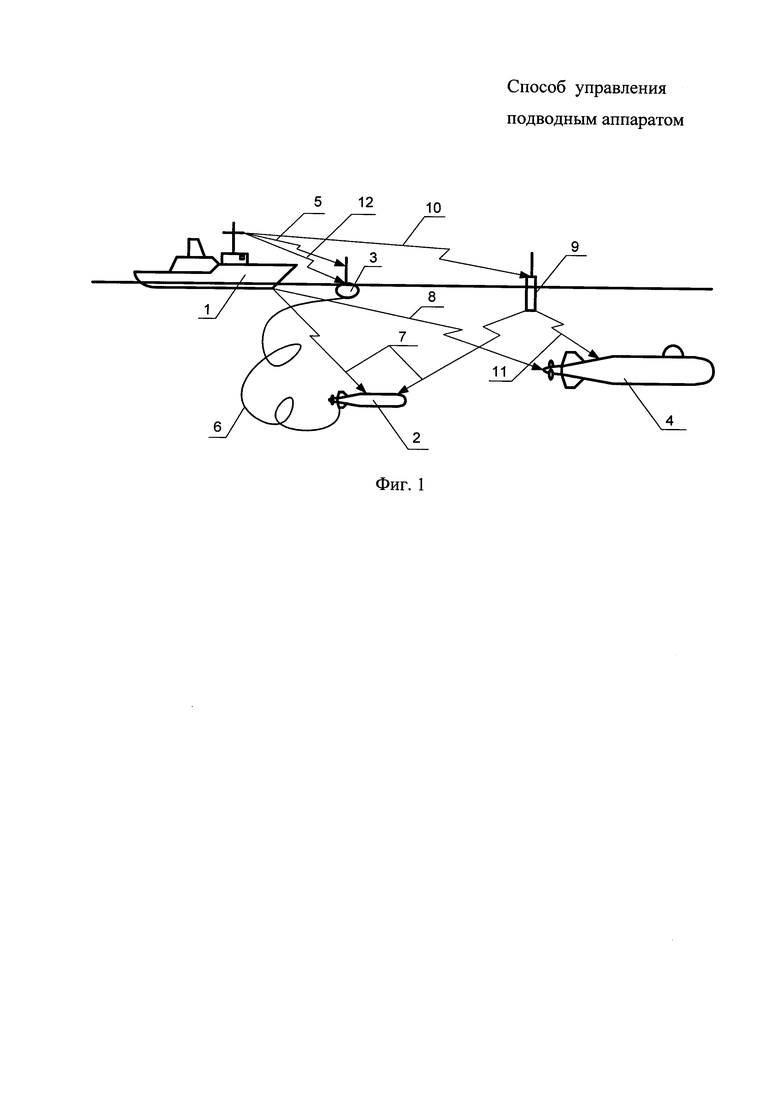
Фиг. 1 - схема работы СТУ ПА.
Схема работы СТУ ПА (фиг. 1) включает в себя выпуск с НК (1) ПА (2) и буя-ретранслятора (3), который, имея положительную плавучесть, всплывает на поверхность моря. На НК наводят ПА на цель (4) по командам канала управления (5-6), для чего используют канал контроля ПА (7), канал контроля цели (8), дополнительные источники информации (9) и канал контроля дополнительных источников информации (10).
Контроль ПА (7) осуществляют с помощью ГАК НК, с помощью дополнительных источников информации (9) или методом траекторных расчетов ПА.
Контроль цели осуществляют с помощью ГАК НК (8), с помощью дополнительных источников информации (11) или приближенно методом траекторных расчетов цели.
Контроль буя-ретранслятора ПА (12) и дополнительных источников информации (10) обеспечивается с помощью гидроакустических, радиотехнических, оптических или лазерных средств с использованием специальных маячков или отражателей.
Использование предлагаемого способа управления подводным аппаратом позволит повысить эффективность наведения ПА на выбранную подводную цель за счет получения на пункте управления большего объема информации о подводной обстановке.
Источники информации
1. В.В. Сурнин и др. Противолодочные средства иностранных флотов / В.В. Сурнин, Ю.Н. Пелевин, В.Л. Чулков. - М.: Воениздат, 1991. - 128 с: ил.
2. А.В. Новиков. Противолодочное ракетное оружие. Теоретические основы. - СПб.: ВМИ, 2007. - 438 с.
3. А.В. Новиков и др. Система телеуправления подводным аппаратом. Патент на изобретение RU 2551834 C1, 2013.
4. А.В. Новиков и др. Устройство радиогидроакустический буй реактивный. Патент на изобретение RU 2400392, 2010.
5. А.В. Новиков и др. Устройство освещения подводной среды реактивным снарядом со взрывным источником звука (варианты). Патент на изобретение RU 2397916, 2010.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ТЕЛЕУПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2013 |
|
RU2551834C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2019 |
|
RU2730749C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ | 2020 |
|
RU2742904C1 |
| СПОСОБ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ ОТ ТОРПЕДЫ | 2020 |
|
RU2746085C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ТОРПЕДАМИ | 2019 |
|
RU2733734C2 |
| СПОСОБ ПРИМЕНЕНИЯ ВЗРЫВНЫХ ИСТОЧНИКОВ ЗВУКА | 2017 |
|
RU2681964C2 |
| КРЫЛАТАЯ РАКЕТА С АВТОНОМНЫМ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ-МИНОЙ | 2018 |
|
RU2714274C2 |
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| СИСТЕМА ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2659314C2 |
| РАКЕТА-ПЛАНЁР С САМОНАВОДЯЩИМСЯ ПОДВОДНЫМ СНАРЯДОМ | 2022 |
|
RU2796086C1 |
Изобретение относится к способу управления подводным аппаратом. С надводного корабля выпускают подводный аппарат (ПА) и буй-ретранслятор, управляют наведением ПА на цель по линии связи надводного корабля с ПА через буй-ретранслятор, контролируют местонахождение ПА, контролируют местонахождение цели, контролируют местонахождение буя-ретранслятора, при сближении ПА с целью системы подают команду и переводят ПА в режим поиска цели. С обнаружением цели производят классификацию контакта и наводят ПА на цель. Осуществляют взаимный обмен информацией между ПА и надводным кораблем о местонахождении обнаруженных подводных объектов и целераспределение. Повышается эффективность наведения ПА на выбранную подводную цель за счет получения на пункте управления большего объема информации о подводной обстановке. 1 ил., 2 табл.
Способ управления подводным аппаратом, при котором с надводного корабля выпускают подводный аппарат и буй-ретранслятор, связанный с подводным аппаратом кабельной линией связи, управляют наведением подводного аппарата на цель по линии связи надводного корабля с подводным аппаратом через буй-ретранслятор, для выработки команд управления контролируют местонахождение подводного аппарата с помощью корабельных средств подводного наблюдения или методом траекторных расчетов подводного аппарата, контролируют местонахождение цели с помощью корабельных средств подводного наблюдения, контролируют местонахождение буя-ретранслятора подводного аппарата с использованием маячков или отражателей, при сближении подводного аппарата с целью на дальность действия его системы обнаружения цели подают команду на ее включение и переводят подводный аппарат в режим поиска цели, с обнаружением цели системой обнаружения подводного аппарата производят классификацию контакта и наводят подводный аппарат на цель по командам системы самонаведения подводного аппарата или оператора, отличающийся тем, что в целях повышения эффективности наведения подводного аппарата на цель осуществляют взаимный обмен информацией между подводным аппаратом и надводным кораблем о местонахождении обнаруженных подводных объектов и целераспределение.
| СИСТЕМА ТЕЛЕУПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2013 |
|
RU2551834C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |

