Изобретение относится к системам дистанционного управления подводными объектами.
Известна система телеуправления (СТУ) противолодочной торпедой (ПЛТ), включающая гидроакустический комплекс (ГАК) корабля, уточняющий местонахождения цели и торпеды, проводную линию связи с торпедой и приборы управления, формирующие сигналы управления торпедой на траектории ([1], с.72).
Указанное выше устройство имеет свои недостатки. Так наличие проводной линии связи корабля с торпедой существенно ограничивает маневрирование корабля из-за возможности ее обрыва, а также необходимости обеспечения работы корабельного ГАК для осуществления контроля цели и торпеды.
Существующие системы дистанционного управления объектами (системы телеуправления) включают канал контроля цели, канал контроля объекта управления и канал управления объектом ([2], с.169-173). Для контроля цели и объекта управления используются известные виды энергии, излучаемые или отражаемые целью (объектом).
Контроль объектов, находящихся в воде и механически не связанных с пунктом управления, может осуществляться с учетом возможностей известных энергетических каналов связи оптическими, электронно-оптическими, лазерными или гидроакустическими средствами. В настоящее время наибольшее распространение в морской технике получили гидроакустические средства, обладающие наилучшими характеристиками по передаче энергии в водной среде.
Для управления подводным аппаратом (ПА) могут быть использованы проводные (кабельные), радиотехнические, оптические (лазерные), гидравлические и гидроакустические каналы.
Данные о взаимном положении цели и объекта управления, полученные по каналам контроля, используются для выработки соответствующих команд управления, которые вырабатываются автоматически или с помощью оператора и поступают в канал управления объектом. Для шифрования команд управления и повышения помехозащищенности канала, а также для селекции (разделения) различных команд может применяться кодирование сигналов управления. В таком случае на командном пункте (КП) управления перед передатчиком устанавливается кодирующее устройство, а на объекте управления - декодирующее устройство после приемника. Линия связи, входящая в канал управления объектом, может быть проводной (кабельной), радиотехнической, оптической (лазерной), гидравлической или гидроакустической. Основным преимуществом радиотехнической линии связи является возможность обеспечения большой дальности действия. Проводная линия связи является наиболее помехоустойчивой, но конструктивно более сложной, поэтому обычно используется совместно с гидравлической. Оптические (лазерные) линии связи не нашли широкого применения в водной среде из-за малой дальности действия.
Целью изобретения является разработка устройства - системы телеуправления подводного аппарата (СТУПА), позволяющего носителю ПА (надводному или подводному) осуществлять дистанционное управление им и при этом не иметь ограничений в маневрировании для обхода навигационных опасностей, уклонения от столкновения с опасными предметами или других целей.
Предлагаемое устройство СТУПА представляет собой совокупность функционально связанных и совместно используемых устройств: ГАК носителя, приборов управления пуском ПА и счетно-решающих приборов (СРП), пусковой установки (ПУ), управляемого ПА, оборудованного устройством приема и расшифровки сигналов управления, канала управления и канала контроля ПА, канала контроля объекта-цели, канала контроля буя-ретранслятора, линий связи указанных каналов с объектами контроля и управления, дополнительных источников информации, применяемых при необходимости в каналах контроля объекта-цели и ПА, в качестве которых предлагается использовать авиационные радиогидроакустические буи (РГБ), радиогидроакустические буи реактивные (РГБР) [3] или устройства освещения подводной среды реактивным снарядом (PC) со взрывным источником звука (ВИЗ) [4].
Поставленная цель достигается благодаря тому, что в отличие от устройства-прототипа (СТУ ПЛТ), включающего канал управления ПЛТ с проводной (кабельной) и/или гидравлической линией связи, каналы контроля цели и торпеды, осуществляемого корабельным ГАК, предлагается в канал управления ПА включить дополнительно буй-ретранслятор, выпускаемый с носителя вместе с ПА, оборудовать его антенной приема команд и передатчиком-ретранслятором для передачи команд управления с носителя на ПА, придать ему положительную или нулевую плавучесть для всплытия на поверхность моря с целью обеспечения линии связи с носителем, находящимся на поверхности, или для нахождения на глубине пуска и обеспечения линии связи с носителем, находящимся на глубине, включить в СТУ канал контроля буя-ретранслятора с линией связи и устройствами, облегчающими его контроль (например, радио- или гидроакустическими маячками), а также канал контроля объекта-цели и ПА дополнительными источниками информации (РГБ, РГБР [3] или PC с ВИЗ [4]) и канал контроля носителем дополнительных источников информации.
О соответствии предложенного технического решения критерию «существенные отличия» свидетельствуют сведения, приведенные в таблице 1.
Предложенное техническое решение соответствует критерию «существенные отличия», так как ни один из отличительных признаков в известном устройстве не обнаружен.
Достижение положительного эффекта при осуществлении предложенного устройства подтверждается сведениями, приведенными в таблице 2.
Техническое осуществление предложенного устройства поясняется чертежами, на которых:
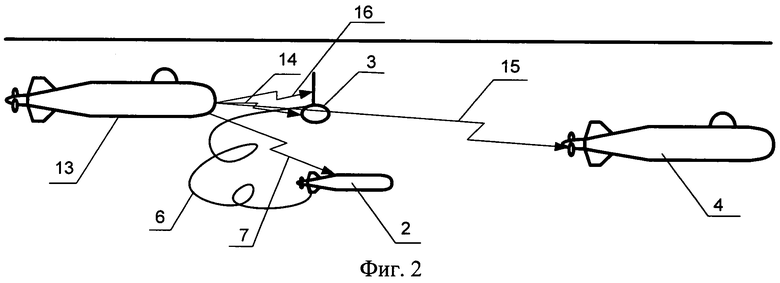
Фиг.1 - схема работы СТУПА с надводным носителем;
Фиг.2 - схема работы СТУПА с подводным носителем.
Сущность предлагаемого устройства СТУПА и его работа заключаются в следующем.
Надводный носитель (1) (фиг.1) выпускает ПА (2) и вместе с ним буй-ретранслятор (3), который имеет положительную плавучесть и всплывает на поверхность моря. ПА имеет задачу сближения с объектом-целью (4). Для осуществления пуска и управления ПА на носителе установлены счетно-решающий прибор (СРП), пусковая установка и устройства каналов контроля объектов (ПА, объекта-цели, буя-ретранслятора и дополнительных источников информации) и управления ПА.
Канал управления ПА включает в себя линию связи «корабль-буй» (5) и «буй-ПА» (6), по которым на ПА поступают закодированные команды управления. Линия связи «корабль-буй» (5) осуществляется радиотехническими, гидроакустическими или оптическими (лазерными) средствами, а линия связи «буй-ПА» (6) выполняется проводной (кабельной), гидравлической или гидроакустической.
Канал контроля ПА (7) включает линию «ГАК корабля-ПА» и линию «дополнительный источник информации-ПА» при использовании дополнительных источников информации (РГБ, РГБР или PC с ВИЗ) (8). При этом контроль местонахождения ПА осуществляется путем определения его координат ГАК корабля, с помощью гидрофонов выставленных РГБ (РГБР), методом расчетов на СРП полученных на ГАК корабля отраженных сигналов от подводных объектов при использовании PC с ВИЗ или методом расчетов траектории движения ПА на СРП по времени, курсу и скорости его движения.
Канал контроля объекта-цели включает линию «ГАК корабля-цель» (9) либо линию «дополнительный источник информации-цель» (10). При этом контроль местонахождения объекта-цели осуществляется путем определения его координат ГАК корабля (9), либо с помощью гидрофонов выставленных РГБ (РГБР) (10), или методом расчетов на СРП полученных на ГАК корабля отраженных сигналов от подводных объектов при использовании PC с ВИЗ.
Канал контроля кораблем буя-ретранслятора (11) обеспечивает контроль его местонахождения с помощью гидроакустических, радиотехнических или оптических (лазерных) средств с использованием специальных маячков или отражателей.
Канал контроля дополнительных источников информации (12) необходим для уточнения их места и реализуется с применением радиотехнических или оптических (лазерных) средств.
В случае, когда ПА выпускает подводный носитель, например подводная лодка (ПЛ) (13) (фиг.2), то СТУПА работает следующим образом.
Вместе с ПА (2) также выпускается и буй-ретранслятор (3), который в данном случае имеет нулевую плавучесть и остается на глубине пуска.
Канал управления ПА предназначен для управления движением ПА к объекту-цели (4) и включает в себя линию связи «ПЛ-буй» (14) и «буй-ПА» (6), по которым на ПА с ПЛ поступают закодированные команды управления. Линия связи «ПЛ-буй» (14) осуществляется гидроакустическими средствами, а линия связи «буй-ПА» (6) выполняется проводной (кабельной), гидравлической или гидроакустической.
Канал контроля ПА (7) осуществляется по линии «ГАК ПЛ-ПА». При этом контроль местонахождения ПА осуществляется путем определения его координат ГАК ПЛ или методом расчетов траектории движения ПА на СРП по времени, курсу и скорости его движения.
Канал контроля объекта-цели работает по линии «ГАК ПЛ-цель» (15), в котором осуществляется контроль местонахождения объекта-цели путем определения его координат с помощью ГАК ПЛ.
Канал контроля подводным носителем буя-ретранслятора (16) обеспечивает контроль его местонахождения с помощью гидроакустических средств с использованием специальных маячков или отражателей.
Дополнительные источники информации (8) (фиг.1) могут применяться и при использовании ПА с подводного носителя, для чего требуется четкая организации взаимодействия подводного носителя с их постановщиками.
За объект-цель принимается любой подвижный или стационарный подводный или надводный объект, сближение с которым является задачей управления ПА.
Источники информации
1. Сурнин В.В. и др. Противолодочные средства иностранных флотов / В.В. Сурнин, Ю.Н. Пелевин, В.Л. Чулков. - М.: Воениздат, 1991. - 128 с.: ил.
2. Новиков А.В. Противолодочное ракетное оружие. Теоретические основы. - СПб.: ВМИ, 2007. - 438 с.
3. Патент на изобретение №2400392. Устройство радиогидроакустический буй реактивный. - М.: ФИПС, 2010.
4. Патент на изобретение №2397916. Устройство освещения подводной среды реактивным снарядом со взрывным источником звука (варианты). - М.: ФИПС, 2010.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2016 |
|
RU2672827C2 |
| РЕАКТИВНАЯ СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2012 |
|
RU2510353C2 |
| ПРОТИВОЛОДОЧНАЯ КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2014 |
|
RU2546726C1 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| Способ освещения подводной обстановки и нейтрализации обнаруженных объектов | 2022 |
|
RU2789185C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2019 |
|
RU2730749C1 |
| РЕАКТИВНЫЙ ПЛАВАЮЩИЙ ПОДВОДНЫЙ СНАРЯД | 2021 |
|
RU2788510C2 |
| СПОСОБ ПРИМЕНЕНИЯ РАДИОГИДРОАКУСТИЧЕСКИХ БУЕВ РЕАКТИВНЫХ (ВАРИАНТЫ) | 2011 |
|
RU2525189C2 |
Изобретение относится к системам дистанционного управления подводными объектами. Надводный носитель выпускает подводный аппарат (ПА) и вместе с ним буй-ретранслятор, оборудуемый антенной приема команд и передатчиком-ретранслятором. Для осуществления пуска и управления ПА на носителе установлены счетно-решающий прибор (СРП), пусковая установка и устройства каналов контроля объектов и управления ПА. Дополнительно включают три канала: канал контроля носителем буя-ретранслятора с линией связи и устройствами, облегчающими его контроль; канал контроля объекта-цели и ПА дополнительными источниками информации; канал контроля носителем дополнительных источников информации. ПА контролируют гидроакустическими средствами носителя и/или дополнительными источниками информации, а также выполнением расчетов в СРП по скорости, курсу и времени движения. Линию связи «корабль-буй» канала управления ПА выполняют с использованием радиотехнических, гидроакустических или оптических (лазерных) средств. Достигается возможность носителя ПА (надводного или подводного) осуществлять дистанционное управление им и при этом не иметь ограничений в маневрировании для обхода навигационных опасностей, уклонения от столкновения с опасными предметами или других целей. 2 ил., 2 табл.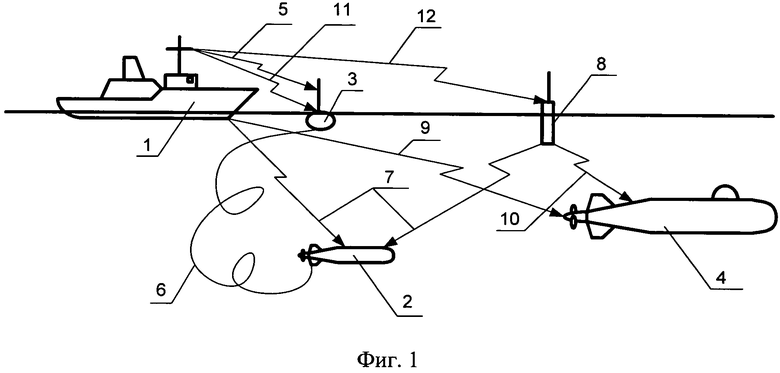
Система телеуправления подводным аппаратом (СТУПА), предназначенная для дистанционного управления подводным аппаратом (ПА), в составе ПА, пусковой установки, счетно-решающего прибора (СРП), устройств канала контроля носителем объекта-цели, канала контроля ПА и канала управления ПА, отличающаяся тем, что в канал управления ПА включают буй-ретранслятор, выпускаемый с носителя вместе с ПА, оборудуют его антенной приема команд и передатчиком-ретранслятором для передачи команд управления с носителя на ПА, придают ему положительную или нулевую плавучесть для всплытия на поверхность моря с целью обеспечения линии связи с носителем, находящимся на поверхности, или для нахождения на глубине пуска и обеспечения линии связи с носителем, находящимся на глубине, дополнительно включают три канала: канал контроля носителем буя-ретранслятора с линией связи и устройствами, облегчающими его контроль, например радио- или гидроакустическими маячками или отражателями, канал контроля объекта-цели и ПА дополнительными источниками информации, в качестве которых используют авиационные радиогидроакустические буи, радиогидроакустические буи реактивные или устройства освещения подводной среды реактивным снарядом со взрывным источником звука, канал контроля носителем дополнительных источников информации, ПА контролируют гидроакустическими средствами носителя и/или дополнительными источниками информации, а также выполнением расчетов в СРП по скорости, курсу и времени движения ПА, линию связи «корабль-буй» канала управления ПА выполняют с использованием радиотехнических, гидроакустических или оптических (лазерных) средств для обеспечения возможности носителя активно маневрировать.
| НОВИКОВ А.В | |||
| Противолодочное ракетное оружие | |||
| Теоретические основы | |||
| Санкт-Петербург, ВМИ, 2007, с.169-173 | |||
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| RU 2011149330 A, 10.06.2013; | |||
| Способ цис-трансизомеризации радикалов свободных ненасыщенных жирных кислот или их эфиров | 1959 |
|
SU123648A1 |
| US 2006235583 A1, 19.10.2006 | |||

