Изобретение относится к области медицинской техники, в частности к механотерапевтическим аппаратам пассивного действия для разработки коленного и тазобедренного суставов человека с целью увеличения их подвижности в процессе лечения и реабилитации.
Известен аппарат для восстановления подвижности суставов человека (см. RU 2139701, кл. А61Н 1/02, 20.10.1999), содержащая неподвижное основание, раму, реверсивный электропривод, соединенный с винтовой парой в виде ходового винта и гайки, коромысла, закрепленные на основании, трансмиссию, два ложемента и опору для стопы.
Недостатком известного аппарата является узкая область применения: либо в варианте для разработки коленного сустава, либо - голеностопного сустава.
Наиболее близким аппаратом является аппарат для механотерапии нижних конечностей (см. RU 2307638, кл. А61Н 1/02, 08.11.2005), содержащий неподвижное основание, раму, реверсивный электропривод, соединенный посредством муфты с винтовой парой в виде ходового винта и гайки, два параллельно расположенных коромысла, шарнирно закрепленные на основании, трансмиссию, выполненную в виде двух связанных и параллельно расположенных четырехзвенных механизмов, ложемента голени, закрепленного на раме, ложемента бедра, закрепленного на звеньях четырехзвенных механизмов, датчик угла, два концевых выключателя, узел управления реверсивным электроприводом, микроконтроллер, выносной пульт экстренного отключения электропривода и панель управления, причем рама шарнирно связана с кареткой, в пазу которой расположена гайка винтовой пары с возможностью ее перемещения по направляющей вдоль оси ходового винта, концевые выключатели, фиксирующие крайние положения каретки, установлены на основании, датчик угла установлен на четырехзвенный механизм, вход узла управления реверсивным электроприводом, датчик угла, концевые выключатели, выносной пульт экстренного отключения электропривода и панель управления подключены к микроконтроллеру, выход узла управления реверсивным электроприводом подключен к реверсивному электроприводу.
Недостатками устройства являются отсутствие возможности использования принципа биологической обратной связи, в том числе синхронизацию движения с биоритмами, а также зрительную и акустическую обратные связи. Механическое воздействие с учетом фазы дыхания позволяет в ряде клинических случаев добиться повышения эффективности проводимой терапии (Физиология кровообращения. Физиология сосудистой системы / под ред. В.И. Ткаченко Л.: Наука, 1984.). Отсутствие возможности использования принципа биологической обратной связи существенно снижает эффективность восстановления движения конечностей в остром периоде и хронической стадии нарушения мозгового кровообращения, при заболеваниях периферической нервной системы (парезы, параличи), а также при травмах костно-мышечного системы (переломы, разрывы сухожилий, контрактуры).
Технический результат, на достижение которого направлено изобретение, заключается в эффективность восстановления движения конечностей в остром периоде и хронической стадии нарушения мозгового кровообращения, при заболеваниях периферической нервной системы (парезы, параличи), а также при травмах костно-мышечного системы (переломы, разрывы сухожилий, контрактуры).
Указанный технический результат достигается тем, что аппарат для механотерапии нижних конечностей, содержащий неподвижное основание, раму, реверсивный электропривод, соединенный посредством муфты с винтовой парой в виде ходового винта и гайки, два параллельно расположенных коромысла, шарнирно закрепленные на основании, трансмиссию, выполненную в виде двух связанных и параллельно расположенных четырехзвенных механизмов, ложемента голени, закрепленного на раме, ложемента бедра, закрепленного на звеньях четырехзвенных механизмов, датчик угла, два концевых выключателя, узел управления реверсивным электроприводом, микроконтроллер, выносной пульт экстренного отключения электропривода и панель управления, причем рама шарнирно связана с кареткой, в пазу которой расположена гайка винтовой пары с возможностью ее перемещения по направляющей вдоль оси ходового винта, концевые выключатели, фиксирующие крайние положения каретки, установлены на основании, датчик угла установлен на четырехзвенный механизм, вход узла управления реверсивным электроприводом, датчик угла, концевые выключатели, выносной пульт экстренного отключения электропривода и панель управления подключены к микроконтроллеру, выход узла управления реверсивным электроприводом подключен к реверсивному электроприводу, содержит генератор зондирующего тока, первый и второй токовые электроды, первый и второй измерительные электроды, усилитель биоэлектрических сигналов, синхронный детектор, аналого-цифровой преобразователь, персональный компьютер, монитор врача, монитор пациента и звуковоспроизводящее устройство, причем генератор зондирующего тока подключен к микроконтроллеру и связан с первым и вторым токовым электродами, расположенными на грудной клетке пациента, первый и второй измерительные электроды, расположенные на грудной клетке пациента соединены с входом усилителя биоэлектрических сигналов, выход которого соединен с сигнальным входом синхронного детектора, вход синхронизации которого подключен к микроконтроллеру, выход синхронного детектора подключен через аналого-цифровой преобразователь с микроконтроллеру, к микроконтроллеру подключен персональный компьютер, связанный с монитором врача, монитором пациента и звуковоспроизводящим устройством.
Указанный технический результат достигается также тем, первый и второй измерительные электроды расположены между первым и вторым токовыми электродами.
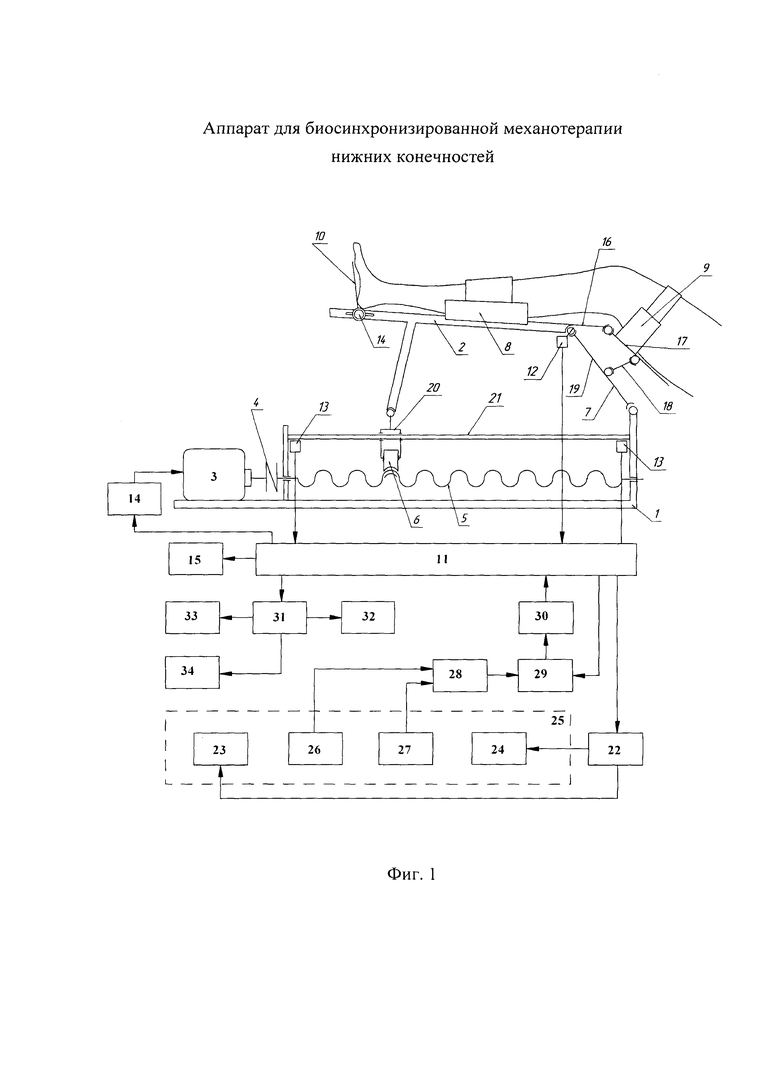
На фигуре 1 показана принципиальная схема аппарата для механотерапии нижних конечностей.
На фигуре показаны:
1. Неподвижное основание;
2. Рама;
3. Реверсивный электропривод;
4. Муфта;
5. Ходовой винт;
6. Гайка;
7. Коромысла;
8. Ложемент голени;
9. Ложемент бедра;
10. Опора для стопы;
11. Микроконтроллер;
12. Датчик угла;
13. Концевые выключатели;
14. Узел управления реверсивным электроприводов;
15. Выносной пульт экстренного отключения электропривода;
16. Панель управления;
17. Первые звенья четырехзвенного механизма;
18. Вторые звенья четырехзвенного механизма;
19. Третьи звенья четырехзвенного механизма;
20. Четвертые звенья четырехзвенного механизма;
21. Каретка;
22. Направляющая;
23. Генератор зондирующего тока;
24. Первый токовый электрод;
25. Второй токовый электрод;
26. Грудная клетка пациента;
27. Первый измерительный электрод;
28. Второй измерительный электрод;
29. Усилитель биоэлектрических сигналов;
30. Синхронный детектор;
31. Аналого-цифровой преобразователь;
32. Персональный компьютер;
33. Монитор врача;
34. Монитор пациента;
35. Звуковоспроизводящее устройство.
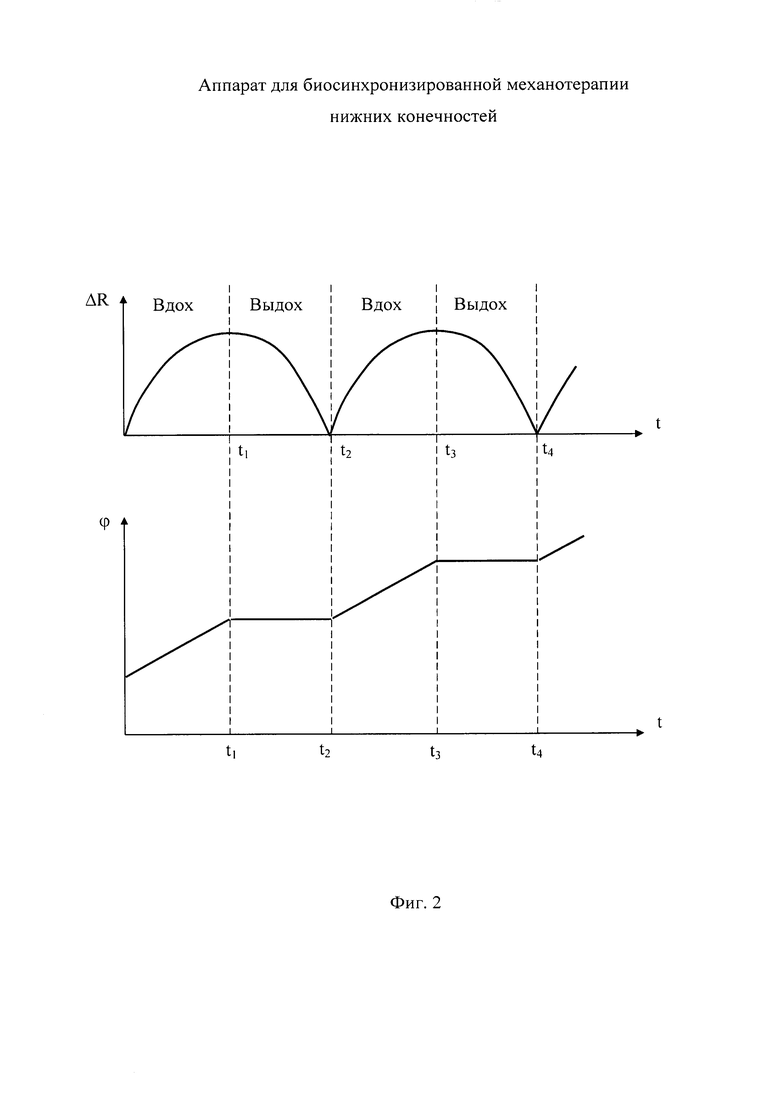
На фигуре 2 показана зависимость угла ф сгибания (разгибания) коленного сустава от времени t. На верхней части фигуры показаны изменения импеданса ΔR между измерительными электродами.
Аппарат для биосинхронизированной механотерапии нижних конечностей работает следующим образом.
Положение ноги пациента фиксируется с помощью ложемента голени 8 на раме 2 аппарата, а также с помощью ложемента бедра 9 на вторых звеньях 18 четырехзвенных механизмов. С помощью элементов фиксации (на фиг. 1 не показаны) опора для стопы 10, выполненная с возможностью вращения относительно оси 14, закрепляется в пазу рамы 2. Регуляторами на панели управления 16 устанавливают граничные значения углов сгибания и разгибания коленного сустава. Кроме того, устанавливают начальный угол ϕ сгибания, а также длительность выдержки при крайних значениях углов сгибания - разгибания и скорость перемещения каретки 21. Данные о заданных параметрах механотерапии с панели управления 16 поступают в микропроцессор 11 и далее в персональный компьютер 32. Эти данные совместно с данными о пациенте фиксируются в памяти персонального компьютера и отображаются на мониторе врача 33.
На грудной клетке пациента 26 закрепляются первый 24 и второй 25 токовые электроды, соединенные с генератором зондирующего тока 23, а первый 27 и второй 28 измерительные электроды закрепляют на грудной клетке пациента между первым 24 и вторым 25 токовыми электродами.
При включении аппарата микроконтроллер 11 вырабатывает команды управления реверсивным электроприводом 3. Вращение вала реверсивного электропривода через редуктор и муфту 4 передается винту 5 винтовой пары. Гайка 5 перемещается вдоль направляющей 22, передавая усилие движения на раму 2. Перемещение рамы вызывает движение четырехзвенного механизма и, соответственно, бедра пациента, закрепленного ложементом 9. Микроконтроллер 11 вырабатывает тактовые импульсы с частотой 100 кГц, которые подаются на генератор зондирующего тока 23, который вырабатывает синусоидальный ток с частотой 100 кГц амплитудой 5 мА, протекающий по тканям грудной клетки пациента между первым 24 и вторым 25 токовыми электродами. При этом на измерительных электродах 27, 28 возникает синусоидальное напряжение с частотой 100 кГц, которое пропорционально импедансу тканей между этими электродами. В процессе дыхания пациента изменяются физические параметры тканей грудной клетки, что приводит к изменению импеданса и, соответственно, к изменению напряжения между измерительными электродами 27 и 28. Таким образом происходит модуляция синусоидального тока с частотой 100 кГц сигналом с частотой дыхания пациента. Модулированный сигнал с измерительных электродов 27 и 28 поступает на вход усилителя биоэлектрических сигналов 29, усиливается в нем и подается на вход синхронного детектора 30. На вход синхронизации синхронного детектора с микроконтроллера 11 подаются тактовые сигналы с частотой 100 кГц. С выхода синхронного детектора 30 демодулированный сигнал с частотой дыхания пациента подается на вход аналого-цифрового преобразователя 31, с выхода которого оцифрованный сигнал с частотой дыхания поступает на вход микроконтроллер 11 для дальнейшей обработки. На фиг. 2 вверху представлен график зависимости изменения импеданса ΔR между измерительными электродами от времени в процессе дыхания пациента. Микроконтроллер 11 в соответствии с программой вырабатывает сигналы включения реверсивного электропривода 3 на время вдоха и выключения реверсивного электропривода 3 на время выдоха. Эти сигналы с микропроцессора 11 подаются на вход узла управления 14 реверсивным электроприводом, который осуществляет коммутацию напряжения электропитания реверсивного электропривода 3.
Информация о текущем значении угла ϕ сгиба поступает на вход микроконтроллера в виде напряжения с датчика угла 12. Эта информация сравнивается с заданными параметрами движения и используется для выработки сигналов, поступающих на узел управления реверсивным электроприводом 3. Выносной пульт 15 экстренного отключения электропривода 3 позволяет пациенту, при необходимости, самому остановить электропривод.
На фиг. 2 внизу показана зависимость угла сгибания (разгибания) коленного сустава от времени. Из графика видно, что во время вдоха угол сгибания (разгибания) коленного сустава изменяется во времени линейно, а во время выдоха движение отсутствует. Этим обеспечивается биосинхронизация пассивной механотерапии нижней конечности с дыханием пациента.
Во время вдоха происходит повышение трансмурального давления в сосудах, что сопровождается, во-первых, снижением их гидродинамического сопротивления и, во-вторых, эффективным засасыванием крови из соседних сосудов (Циммерман М. Физиология человека. - М., издательство Мир, 1996, 313 с.). Таким образом, механическое воздействие на конечность во время фазы вдоха способствует повышению эффективности проводимой процедуры механотерапии.
Во время процедуры биосинхронизированной механотерапии на мониторе пациента 34 схематически отображается нижняя конечность в процессе ее движения. При наблюдении пациентом изображения движения нижней конечности, которое управляется в такт с его дыханием, обеспечивается зрительная обратная связь. Программа компьютера вырабатывает также звуковой сигнал (например, шум прибоя), синхронный с частотой дыхания пациента. Пациент может прослушивать этот звуковой сигнал с помощью звуковоспроизводящего устройства 35 (наушников), подключенного к персональному компьютеру. Биосинхронизация механотерапии нижних конечностей с ритмом дыхания пациента в совокупности со зрительной и звуковой обратными связями повышает толерантность к физической нагрузке и уменьшает число нейрогенных синкопальных явлений при заболеваниях сосудов мозга в ранних стадиях.
Таким образом, изобретение позволяет за счет использования принципа биологической обратной связи существенно повысить эффективность восстановления движения нижних конечностей в остром периоде и хронической стадии нарушения мозгового кровообращения, при заболеваниях периферической нервной системы (парезы, параличи), а также при травмах костно-мышечного системы (переломы, разрывы сухожилий, контрактуры).
Все узлы аппарата для биосинхронизированной механотерапии нижних конечностей выполнены на широко применяемых стандартных элементах. В качестве микроконтроллера используется PIC-контроллер типа PIC16F877-20IP фирмы «Microchip». В реверсивном электроприводе используют коллекторный двигатель с возбуждением постоянным магнитом типа МЭ241. В качестве датчика угла, установленного на четырехзвенный механизм, использован прецизионный потенциометрический датчик типа ПД-11.
Изобретение позволяет повысить эффективность восстановления движения конечностей в остром периоде и хронической стадии нарушения мозгового кровообращения, при заболеваниях периферической нервной системы (парезы, параличи), а также при травмах костно-мышечного системы (переломы, разрывы сухожилий, контрактуры).
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2005 |
|
RU2307638C2 |
| Устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией | 2016 |
|
RU2641065C2 |
| УСТРОЙСТВО ДЛЯ МЕХАНОТЕРАПИИ ПОЗВОНОЧНИКА | 2009 |
|
RU2407505C1 |
| СПОСОБ ДИАГНОСТИКИ ФУНКЦИИ ВНЕШНЕГО ДЫХАНИЯ С ПОМОЩЬЮ ИМПЕДАНСНОЙ СПИРОГРАФИИ И ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС "БИА-лаб Спиро" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2487662C2 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2004 |
|
RU2281077C1 |
| НОСИМЫЙ МОНИТОР С АВТОМАТИЧЕСКОЙ ПЕРЕДАЧЕЙ ДИАГНОЗА ПО КАНАЛУ СВЯЗИ ПРИ ВОЗНИКНОВЕНИИ КРИТИЧЕСКОЙ СИТУАЦИИ | 2010 |
|
RU2444986C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС МНОГОКАНАЛЬНОЙ ДИАГНОСТИКИ И МОНИТОРИНГА ДЛЯ ДИСТАНЦИОННЫХ ИССЛЕДОВАНИЙ ПАЦИЕНТОВ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2018 |
|
RU2683898C1 |
| СИСТЕМА ДЛЯ ОЦЕНКИ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ | 2005 |
|
RU2291665C1 |
| УСТРОЙСТВО КОМПЛЕКСНОГО ИССЛЕДОВАНИЯ СОСТОЯНИЯ ВЕГЕТАТИВНОЙ НЕРВНОЙ СИСТЕМЫ | 2008 |
|
RU2407430C2 |
Изобретение относится к области медицинской техники и предназначено для реабилитации пациентов с нарушением функций нижних конечностей. Аппарат для механотерапии нижних конечностей содержит неподвижное основание, раму, реверсивный электропривод, соединенный посредством муфты с винтовой парой в виде ходового винта и гайки, два параллельно расположенных коромысла, шарнирно закрепленные на основании, трансмиссию, выполненную в виде двух связанных и параллельно расположенных четырехзвенных механизмов, ложемента голени, закрепленного на раме, ложемента бедра, закрепленного на звеньях четырехзвенных механизмов, датчик угла, два концевых выключателя, узел управления реверсивным электроприводом, микроконтроллер, выносной пульт экстренного отключения электропривода, панель управления, генератор зондирующего тока, первый и второй токовые электроды, первый и второй измерительные электроды, усилитель биоэлектрических сигналов, синхронный детектор, аналого-цифровой преобразователь, персональный компьютер, монитор врача, монитор пациента и звуковоспроизводящее устройство. Рама шарнирно связана с кареткой, в пазу которой расположена гайка винтовой пары с возможностью ее перемещения по направляющей вдоль оси ходового винта. Концевые выключатели, фиксирующие крайние положения каретки, установлены на основании, а датчик угла установлен на четырехзвенный механизм. Вход узла управления реверсивным электроприводом, датчик угла, концевые выключатели, выносной пульт экстренного отключения электропривода и панель управления подключены к микроконтроллеру. Выход узла управления реверсивным электроприводом подключен к реверсивному электроприводу. Генератор зондирующего тока подключен к микроконтроллеру и связан с первым и вторым токовым электродами, расположенными на грудной клетке пациента, первый и второй измерительные электроды, расположенные на грудной клетке пациента, соединены с входом усилителя биоэлектрических сигналов, выход которого соединен с сигнальным входом синхронного детектора, вход синхронизации которого подключен к микроконтроллеру, выход синхронного детектора подключен через аналого-цифровой преобразователь с микроконтроллеру. К микроконтроллеру подключен персональный компьютер, связанный с монитором врача, монитором пациента и звуковоспроизводящим устройством. Изобретение позволяет повысить эффективность восстановления движения конечностей в остром периоде и хронической стадии нарушения мозгового кровообращения, при заболеваниях периферической нервной системы (парезы, параличи), а также при травмах костно-мышечной системы (переломы, разрывы сухожилий, контрактуры). 1 з.п. ф-лы, 2 ил.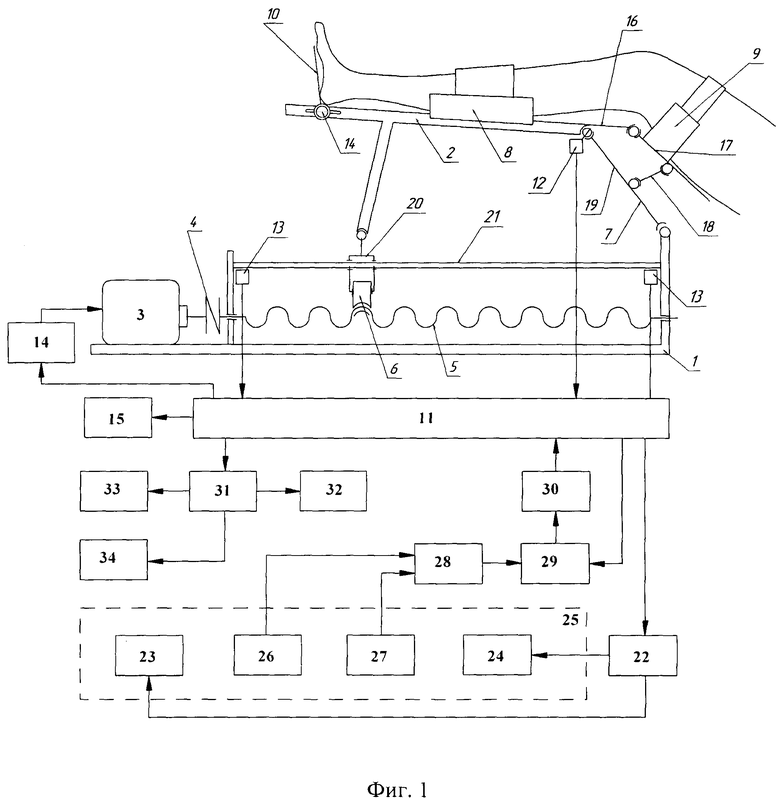
1. Аппарат для механотерапии нижних конечностей, содержащий неподвижное основание, раму, реверсивный электропривод, соединенный посредством муфты с винтовой парой в виде ходового винта и гайки, два параллельно расположенных коромысла, шарнирно закрепленные на основании, трансмиссию, выполненную в виде двух связанных и параллельно расположенных четырехзвенных механизмов, ложемента голени, закрепленного на раме, ложемента бедра, закрепленного на звеньях четырехзвенных механизмов, датчик угла, два концевых выключателя, узел управления реверсивным электроприводом, микроконтроллер, выносной пульт экстренного отключения электропривода и панель управления, причем рама шарнирно связана с кареткой, в пазу которой расположена гайка винтовой пары с возможностью ее перемещения по направляющей вдоль оси ходового винта, концевые выключатели, фиксирующие крайние положения каретки, установлены на основании, датчик угла установлен на четырехзвенный механизм, вход узла управления реверсивным электроприводом, датчик угла, концевые выключатели, выносной пульт экстренного отключения электропривода и панель управления подключены к микроконтроллеру, выход узла управления реверсивным электроприводом подключен к реверсивному электроприводу, отличающийся тем, что содержит генератор зондирующего тока, первый и второй токовые электроды, первый и второй измерительные электроды, усилитель биоэлектрических сигналов, синхронный детектор, аналого-цифровой преобразователь, персональный компьютер, монитор врача, монитор пациента и звуковоспроизводящее устройство, причем генератор зондирующего тока подключен к микроконтроллеру и связан с первым и вторым токовым электродами, расположенными на грудной клетке пациента, первый и второй измерительные электроды, расположенные на грудной клетке пациента, соединены с входом усилителя биоэлектрических сигналов, выход которого соединен с сигнальным входом синхронного детектора, вход синхронизации которого подключен к микроконтроллеру, выход синхронного детектора подключен через аналого-цифровой преобразователь с микроконтроллеру, к микроконтроллеру подключен персональный компьютер, связанный с монитором врача, монитором пациента и звуковоспроизводящим устройством.
2. Устройство по п. 1, отличающееся тем, что первый и второй измерительные электроды расположены между первым и вторым токовыми электродами.
| Устройство для разработки нижней конечности | 1989 |
|
SU1747066A1 |
| Двухобмоточный линейный потенциометр | 1961 |
|
SU148127A1 |
| 0 |
|
SU176192A1 | |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |

