ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
1. Область техники, к которой относится изобретение
Настоящее изобретение относится к технологии для управления работой насоса в насосной системе; и, более конкретно, настоящее изобретение относится к способу и установке для управления и/или мониторинга одного или более насосов в бустерном устройстве с множеством насосов изменяемой скорости, например, включая применения для систем коммунально-бытового водоснабжения.
2. Краткое описание предшествующего уровня техники
В бустерном устройстве с множеством насосов переменной скорости, датчик давления используется и присоединен на выходной линии бустерного комплекса, где он измеряет и поддерживает постоянное выходное давление. Так как потери на трение в системе изменяются с изменением расхода, обычно, система будет иметь чрезмерное давление при требуемом низком расходе. В результате, система использует больше энергии, чем ей иным образом требуется. Когда расходомер является доступным, потери на трение могут определяться посредством использования значения расхода.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В общих словах, в устройстве с множеством насосов изменяемой скорости в соответствии с настоящим изобретением, показатель скорость может использоваться для расчета потерь системы на трение, например, вместо расходомера, который иным образом используется в конструкциях по предшествующему уровню техники. В сущности, этот способ или технология обеспечивает новый и уникальный способ компенсации потерь на трение бустерной системы без дополнительного расходомера.
Конкретные варианты осуществления
В соответствии с некоторыми вариантами осуществления, настоящее изобретение может включать в себя, или принимать форму, установку, отличающуюся наличием сигнального процессора или процессорного модуля, выполненного с возможностью по меньшей мере:
ответа на сигнализирование, содержащее информацию об установленной точке и скорости, относящуюся к одному или более насосам в насосной системе, включая бустерную систему с множеством насосов переменной скорости, работающую по существу при постоянном выходном давлении; и
определения регулирования установленной точки для компенсации потерь на трение системы и поддержания по существу постоянного выходного давления насосной системы для изменения расхода, на основании, по меньшей мере частично, полученного сигнализирования.
Установка может включать в себя, или принимать форму, контроллер насосной системы, имеющий сигнальный процессор или процессорный модуль, предусмотренный в нем, а также насосную систему, такую как бустерная система с множеством насосов переменной скорости, имеющую такой контроллер насосной системы с сигнальным процессором или процессорным модулем, предусмотренным в нем, в соответствии с тем, что задано здесь.
Варианты осуществления настоящего изобретения также могут включать один или более из следующих признаков:
Сигнальный процессор или процессорный модуль может быть выполнен с возможностью обеспечения соответствующего сигнализирования, содержащего информацию для управления одним или более насосами в насосной системе, такой как бустерная система с множеством насосов переменной скорости.
Сигнальный процессор или процессорный модуль может быть выполнен с возможностью определения регулирования установленной точки, используя интерполяцию, основанную, по меньшей мере частично, на взаимном отношении между минимальной установленной точкой для минимальной скорости и максимальной установленной точкой для максимальной скорости, чтобы найти значение отрегулированной установленной точки для скорости.
Сигнальный процессор или процессорный модуль может образовывать часть одного или более логических модулей, или компаратора, или пропорционально-интегрально-дифференциального (ПИД) контроллера.
Сигнальный процессор или процессорный модуль может быть выполнен с возможностью определения количества одного или более насосов, работающих в бустерной системе с множеством насосов переменной скорости, и заданной площади управления, относящейся к одному или более работающим насосам.
Сигнальный процессор или процессорный модуль может быть выполнен с возможностью определения регулирования на основании, по меньшей мере частично, количества одного или более насосов, работающих в бустерной системе с множеством насосов переменной скорости, и заданной площади управления, относящейся к одному или более работающим насосам.
В качестве примера, сигнальный процессор или процессорный модуль может включать в себя, или принимать форму, по меньшей мере один процессор и по меньшей мере одну запоминающее устройство, включающее в себя код компьютерной программы, и по меньшей мере одно запоминающее устройство и код компьютерной программы выполнены с возможностью, с по меньшей мере одним процессором, побуждать сигнальный процессор или процессорный модуль по меньшей мере принимать сигнализирование и определять регулирование установленной точки. Сигнальный процессор или процессорный модуль может быть предусмотрен с подходящим кодом компьютерной программы для воплощения подходящих алгоритмов для обработки сигнала и/или функциональных возможностей, в соответствии с тем, что задано здесь.
Регулирование установленной точки может определяться без использования расходомера, например, содержащего информацию на основании скорости насоса.
Сигнальный процессор или процессорный модуль также может быть выполнен с возможностью определения максимальных потерь давления насосной системы и заданной площади управления каждого насоса; и определения максимальных потерь одного или более насосов, на основании максимальных потерь давления насосной системы и заданной площади управления каждого насоса. Сигнальный процессор или процессорный модуль также может быть выполнен с возможностью определения значения максимальных потерь одного или более насосов, которое может использоваться для задания формы кривой управления установленной точкой.
В соответствии с некоторыми вариантами осуществления, настоящее изобретение может принимать форму способа, включающего этапы для: ответа с помощью сигнального процессора или процессорного модуля на сигнализирование, содержащее информацию об установленной точке и скорости, относящуюся к одному или более насосам в насосной системе, например, включая бустерную систему с множеством насосов переменной скорости, работающую по существу при постоянном выходном давлении; и определения с помощью сигнального процессора или процессорного модуля регулирования установленной точки для компенсации потерь на трение системы и поддержания по существу постоянного выходного давления бустерной системы с множеством насосов переменной скорости для изменения расхода, на основании, по меньшей мере частично, полученного сигнализирования.
Настоящее изобретение также может, например, принимать форму компьютерного программного продукта, имеющего машиночитаемый носитель с выполняемым компьютером кодом, встроенным в него, для воплощения способа, например, когда запущен на сигнальном процессорном устройстве, которое образует часть такого контроллера насоса. В качестве примера, компьютерный программный продукт может, например, принимать форму CD, гибкого магнитного диска, флеш-накопителя, карты памяти, а также других типов или видов запоминающих устройств, которые могут хранить такой выполняемый компьютером код на таком машиночитаемом носителе, известном либо в настоящее время, либо позже разработанном в будущем.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Чертежи включают следующие фигуры, которые необязательно выполнены в масштабе:
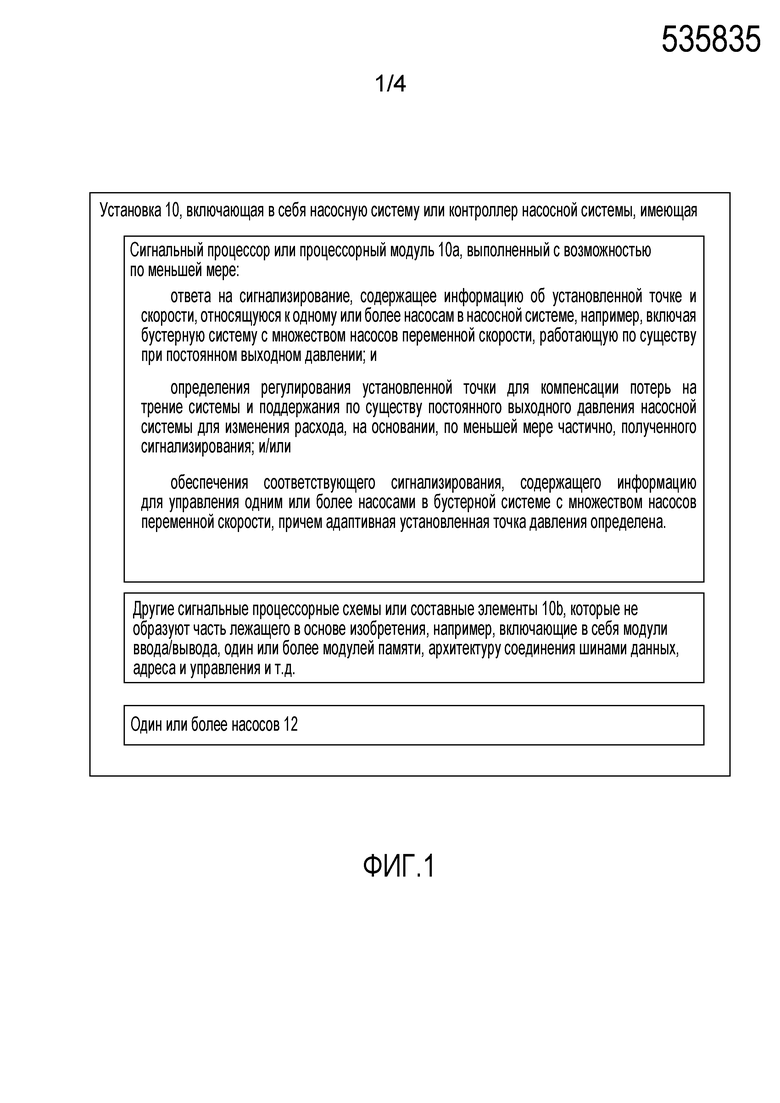
Фигура 1 представляет собой блок-схему установки, например, имеющей сигнальный процессор или процессорный модуль, выполненный с возможностью воплощения функциональных возможностей для обработки сигнала, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
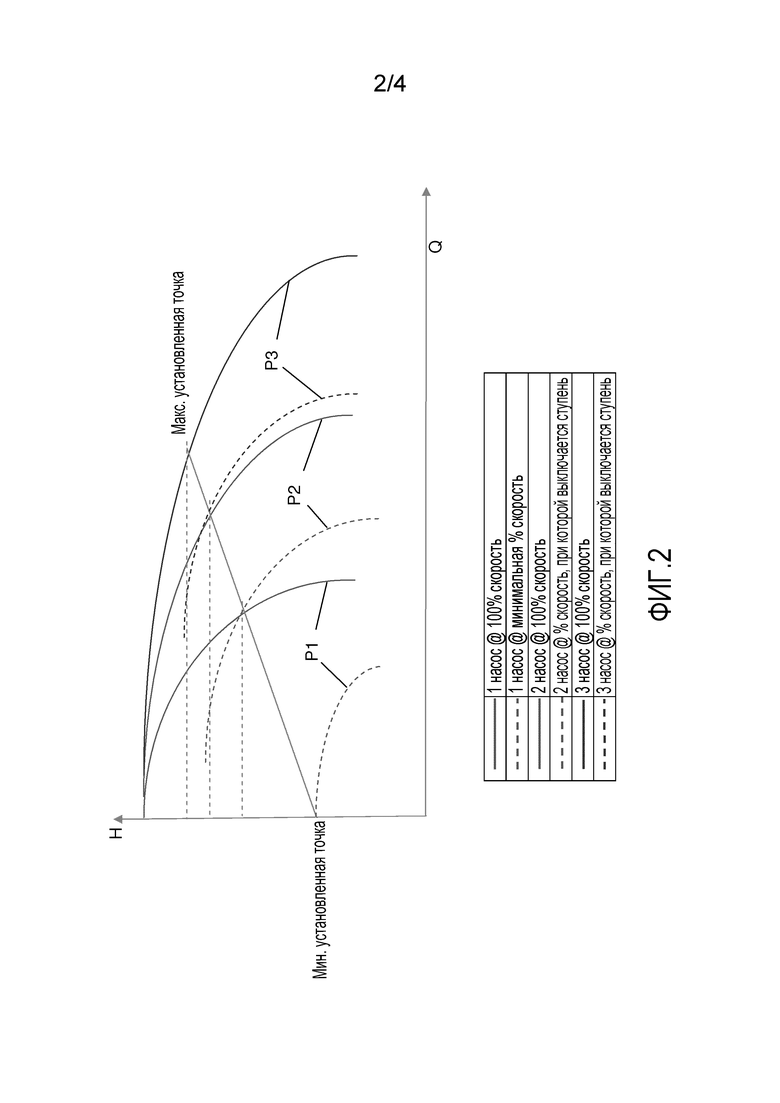
Фигура 2 представляет собой график расхода Q (например, в м3/мин) в зависимости от давления H напора (например, в метрах водяного столба или кг/кв.м), показывающий 100% скорость и минимальную % скорость для трех насосов 1, 2 и 3 относительно минимальной и максимальной установленных точек.
Фигура 3 представляет собой блок-схему компенсации расхода для насосной системы с тремя (3) насосами, имеющей этапы для воплощения способа в соответствии с некоторыми вариантами осуществления настоящего изобретения.
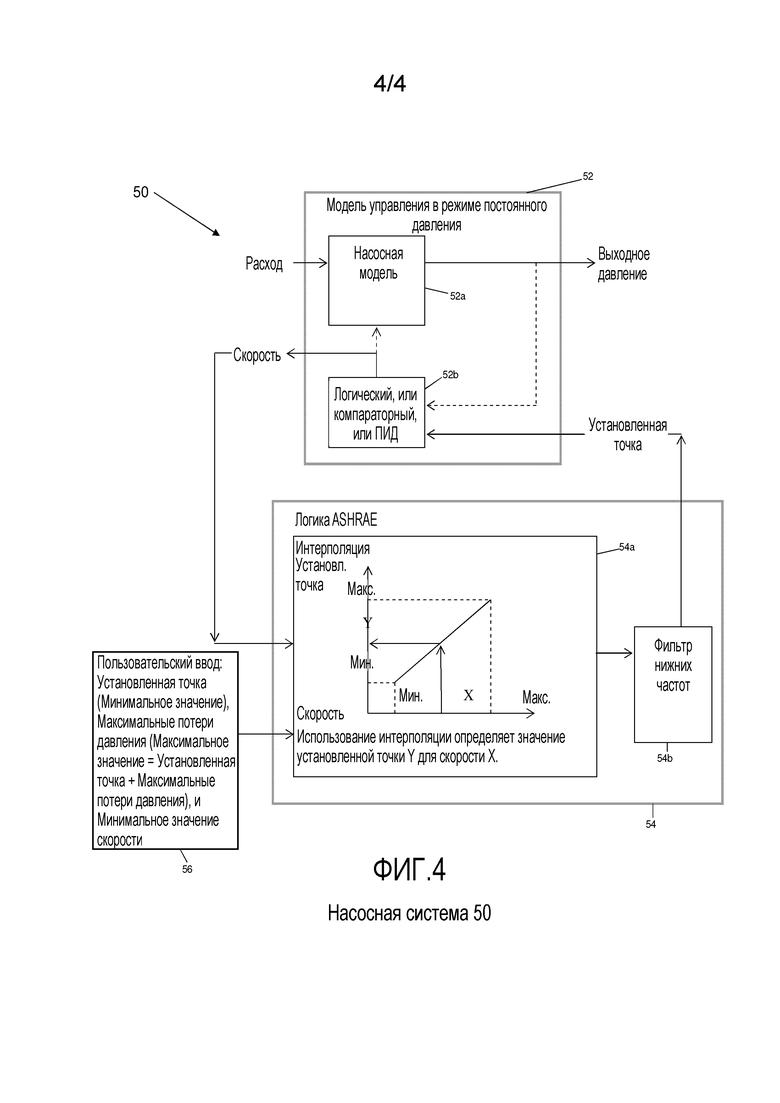
Фигура 4 представляет собой блок-схему установки в форме насосной системы, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фигура 1:
В качестве примера, на фигуре 1 показана установка 10 в соответствии с некоторыми вариантами осуществления настоящего изобретения, например, отличающаяся сигнальным процессором или процессорным модулем 10a, выполненным с возможностью по меньшей мере:
ответа на сигнализирование, содержащее информацию об установленной точке (SP) и скорости, относящуюся к одному или более насосам 12 в насосной системе 50 (фигура 4), например, включая бустерную систему с множеством насосов переменной скорости, работающую по существу при постоянном выходном давлении; и
определения регулирования установленной точки для компенсации потерь на трение системы и поддержания по существу постоянного выходного давления насосной системы (например, такой как бустерная система с множеством насосов переменной скорости) для изменения расхода, на основании, по меньшей мере частично, полученного сигнализирования.
Сигнальный процессор или процессорный модуль 10a может быть выполнен с возможностью обеспечения соответствующего сигнализирования, содержащего информацию для управления одним или более насосами 12, например, в бустерной системе с множеством насосов переменной скорости.
В качестве примера, установка 10 может включать в себя, или принимать форму, контроллер насосной системы, имеющий сигнальный процессор или процессорный модуль 10a, предусмотренный в нем для управления работой одного или более насосов 12, а также подобный насосной системе элемент 50 (фигура 4), такой как бустерная система с множеством насосов переменной скорости, имеющий такой контроллер насосной системы с сигнальным процессором или процессорным модулем 10a, предусмотренным в нем, в соответствии с тем, что задано здесь. В качестве еще одного дополнительного примера, насосная система может включать в себя, или принимать форму, насосную систему, например, подобную насосной системе, показанной на фигуре 4.
Настоящее изобретение описывается касательно насосной системы, такой как бустерная система с множеством насосов переменной скорости, работающей по существу при постоянном выходном давлении; однако, объем изобретения предусматривает включать в себя другие типы или виды насосных систем, работающих по существу при постоянном выходном давлении, которые известны либо в настоящее время, либо позже будут разработаны в будущем.
Сигнальный процессор или процессорный модуль 10a может быть выполнен с возможностью работы совместно с другими сигнальными процессорными схемами или составными элементами 10b.
Фигуры 2-3
Как специалист в данной области может легко понять, понимается, что расход в насосе является пропорциональным скорости согласно законам подобия. Но в бустерной системе с множеством насосов переменной скорости, трудно использовать показатель скорости для оценки расхода системы, так как он также зависит от количества насосов, которые работают в любое заданное время. В бустерном устройстве с множеством насосов переменной скорости, оптимальный способ включения и выключения ступеней определяет количество насосов в работе и их общую площадь управления, например, см. график, показанный на фигуре 2. На основании заданной площади управления и количества насосов, система может быть способной выполнять регулирование установленной точки для компенсации потерь на трение системы и поддержания постоянного давления в системе для изменения расхода, например, в соответствии с тем, что задано здесь.
Установленная точка (Минимальное значение):
Установленная точка (минимальное значение) представляет собой значение давления, которое должно подаваться при минимальном расходе (или при отсутствии расхода). Теоретически, потери давления будут нулевыми при отсутствии расхода (или при очень минимальном расходе). Таким образом, другими словами, можно сказать, что установленная точка представляет собой значение давления, которое требуется для поддержания требуемой постоянной величины со стороны пользователя.
Максимальные потери давления:
Максимальные потери давления представляют собой потери давления (например, от потерь на трение системы в трубопроводной или распределительной сети) в системе при максимальном расходе.
Существует по меньшей мере два способа определения этого значения.
1. Рассчитать потери на трение системы для максимального расхода на основании трубопроводных и фитинговых составных элементов, использующихся в трубопроводной или распределительной сети.
2. Обеспечить возможность работы системы в состоянии требуемого полного расхода, затем измерить давление в точке выпуска насоса и со стороны пользователя, где разница между этими двумя величинами должна представлять собой максимальные потери давления.
Минимальное значение скорости:
Минимальное значение скорости представляет собой скорость, при которой один насос работает в состоянии требуемого отсутствия расхода (или при очень минимальном расходе) и по-прежнему достигает выходного давления выше установленной точки (Минимального значения). В идеале, это значение должно быть таким же, как минимальная частота вращения частотно-регулируемого привода (ЧРП). При работе, контроллер типично воплощается таким образом, чтобы не допускать значения, меньшего минимальной частоты вращения ЧРП.
В качестве примера, на фигуре 3 показана блок-схема компенсации расхода для насосной системы с тремя (3) насосами, в целом обозначенной 100, имеющая этапы 100a, 100b, 100c,..., 100k для воплощения способа или процесса, в соответствии с некоторыми вариантами осуществления настоящего изобретения. Этапы 100a, 100b, 100c,..., 100k могут воплощаться, например, используя сигнальный процессор или процессорный модуль 10a совместно с сигнальными процессорными схемами или составными элементами 10b, в соответствии с тем, что описано здесь.
В качестве примера, на этапе 100a, начинается способ, который может включать в себя некоторые подготовительные этапы и инициализацию, что было бы понятным специалисту в данной области, например, а также обеспечение технологии компенсации расхода, в соответствии с тем, что задано здесь.
На этапе 100b, сигнальный процессор или процессорный модуль 10a определяет, обеспечивается ли компенсация расхода. Если нет, то начальный этап 100a повторно воплощается.
На этапе 100c, с обеспечивающейся компенсацией расхода, сигнальный процессор или процессорный модуль 10a определяет, составляет ли количество работающих насосов больше 0. Если нет (т.е., количество работающих насосов равно 0), то на этапе 100d сигнальный процессор или процессорный модуль 10a устанавливает:
Текущая SP=Минимальная SP.
На этапе 100e, сигнальный процессор или процессорный модуль 10a определяет, составляет ли количество работающих насосов больше 1. Если нет (т.е., количество работающих насосов равно 1), то на этапе 100f сигнальный процессор или процессорный модуль 10a устанавливает:
Приведенная скорость=(Рабочая скорость - Минимальная скорость)/(100 - Минимальная скорость),
Рассчитанная SP=Приведенная скорость*Максимальные потери для насоса 1, и
Текущая SP=Минимальная SP+Рассчитанная SP.
На этапе 100g, сигнальный процессор или процессорный модуль 10a определяет, составляет ли количество работающих насосов больше 2. Если нет (т.е., количество работающих насосов равно 2), то на этапе 100h сигнальный процессор или процессорный модуль 10a устанавливает:
Приведенная скорость=(Рабочая скорость - Скорость, при которой выключается ступень)/(100 - Скорость, при которой выключается ступень),
Рассчитанная SP=Приведенная скорость*Максимальные потери для насоса 2, и
Текущая SP=Минимальная SP+Рассчитанная SP+Максимальные потери для насоса 1.
На этапе 100i, сигнальный процессор или процессорный модуль 10a определяет, составляет ли количество работающих насосов больше 3. Если нет (т.е., количество работающих насосов равно 3), то на этапе 100j сигнальный процессор или процессорный модуль 10a устанавливает:
Приведенная скорость=(Рабочая скорость - Скорость, при которой выключается ступень)/(100 - Скорость, при которой выключается ступень),
Рассчитанная SP=Приведенная скорость*Максимальные потери для насоса 2, и
Текущая SP=Минимальная SP+Рассчитанная SP+Максимальные потери для насоса 1+Максимальные потери для насоса 2.
На этапе 100k, способ заканчивается.
Максимальные потери одного или более насосов 1, 2 и 3:
Сигнальный процессор или процессорный модуль 10a также может быть выполнен с возможностью определения максимальных потерь одного или более насосов 1, 2 и 3, например, на основании максимальных потерь давления насосной системы и заданной площади управления каждого насоса. Как было бы понятным специалисту в данной области, значение максимальных потерь одного или более насосов 1, 2 и 3 может использоваться для задания формы кривой управления установленной точкой, например, в соответствии с тем, что показано на фигуре 2.
Фигура 4
На фигуре 4 показана установка в форме насосной системы 50 (например, включая бустерную систему с множеством насосов переменной скорости), которая может включать в себя модель 52 управления в режиме постоянного давления в комбинации с логическим модулем 54 ASHRAE (Американская Ассоциация инженеров по отоплению, охлаждению и кондиционированию воздуха), в соответствии с некоторыми вариантами осуществления настоящего изобретения. Модель 52 управления в режиме постоянного давления может включать в себя насосную модель 52a в комбинации с логическим, или компараторным, или ПИД-контроллерным модулем 52b. Насосная модель 52a может включать в себя, содержать, или принимать форму, один или более работающих насосов 12 (фигура 1), а также множество насосов, работающих в системе множества насосов, которые могут включаться и выключаться во время работы насосной системы. Логический модуль 54 ASHRAE может включать в себя интерполяционный модуль 54a установленной точки и модуль 54b фильтра нижних частот.
При работе, модель 52 управления в режиме постоянного давления может быть выполнена с возможностью получения потока от трубопроводной или распределительной сети, который может обрабатываться и закачиваться обратно в трубопроводную или распределительную сеть; и модель 52 управления в режиме постоянного давления также может быть выполнена с возможностью ответа на сигнализирование установленной точки от логического модуля 54 ASHRAE, накачивания потока при по существу постоянном выходном давлении и обеспечения сигнала скорости, содержащего информацию о скорости, относящейся к модели 52 управления в режиме постоянного давления. Логический модуль 54 ASHRAE может быть выполнен с возможностью получения пользовательских вводов 56, например, содержащих информацию об установленной точке (минимальном значении), максимальных потерях давления (например, где Максимальное Значение Давления = Установленная Точка + Максимальные Потери Давления) и минимальном значении скорости, и также может быть выполнен с возможностью получения сигнализирования скорости от модели 52 управления в режиме постоянного давления и обеспечения сигнализирования установленной точки на модель 52 управления в режиме постоянного давления.
В частности, интерполяционный модуль 54a установленной точки может быть выполнен с возможностью ответа на сигнализирование пользовательского ввода, содержащее информацию о пользовательских вводах, и также ответа на сигнализирование скорости от модели 52 управления в режиме постоянного давления, использования интерполяции для определения значения установленной точки Y для скорости X, и обеспечения сигнализирования интерполяции, содержащего информацию о значении установленной точки Y для скорости X, в соответствии с тем, что показано на фигуре 4. Интерполяционный модуль 54a установленной точки, показанный на фигуре 4, включает изображение графика, имеющего скорость вдоль оси X и установленную точку вдоль оси Y, который образует основу для, и визуально характеризует, процесса определения интерполяции, выполняемого в нем. Модуль 54b фильтра нижних частот может быть выполнен с возможностью ответа на сигнализирование интерполяции и обеспечения сигнализирования интерполяции фильтра нижних частот, содержащего отфильтрованную по нижним частотам информацию об интерполяции, относящуюся к значению установленной точки Y для скорости X, которая принимает форму сигнализирования установленной точки, обеспеченного для модели 52 управления в режиме постоянного давления, в соответствии с тем, что показано на фигуре 4.
Логический, или компараторный, или ПИД-контроллерный модуль 52b может быть выполнен с возможностью ответа на сигнализирование установленной точки, определения сигнализирования скорости (например, на основании, по меньшей мере частично, значения установленной точки Y для скорости X), обеспечения/подачи сигнализирования скорости обратно на логический модуль 54 ASHRAE, и также обеспечения сигнализирования скорости на насосную модель 52a для управления скоростью одного или более насосов, работающих в насосной модели 52a. Насосная модель 52a выполнена с возможностью получения потока от трубопроводной или распределительной сети и также выполнена с возможностью ответа на сигнализирование установленной точки и накачивания потока при по существу постоянном выходном давлении. На фигуре 4, насосная модель 52a также показана таким образом, чтобы включать пунктирную линию, которая визуально обозначает, что некоторая информация о выходном давлении, например, содержащаяся в подходящем сигнализировании выходного давления, может подаваться обратно на логический, или компараторный, или ПИД-контроллерный модуль 52b. В таком случае, логический, или компараторный, или ПИД-контроллерный модуль 52b также может быть выполнен с возможностью ответа на такое подходящее сигнализирование выходного давления и определения сигнализирования скорости, например, на основании, по меньшей мере частично, полученного сигнализирования выходного давления.
В качестве примера, функциональные возможности сигнального процессора или процессорного модуля 10a могут воплощаться, используя часть функциональных возможностей, воплощенных логическим, или компараторным, или ПИД-контроллерным модулем 52b, относящихся к генерированию сигнализирования скорости, в комбинации с частью функциональных возможностей, воплощенных интерполяционным модулем 54a установленной точки, относящихся к адаптации/регулированию установленной точки, чтобы компенсировать для системы потери на трение в трубопроводной или распределительной сети в бустерной системе с множеством насосов переменной скорости. Другими словами, функциональные возможности логического, или компараторного, или ПИД-контроллерного модуля 52b и интерполяционного модуля 54a установленной точки могут воплощаться в одном процессорном модуле, таким образом, чтобы включать и воплощать функциональные возможности сигнального процессора или процессорного модуля 10a, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
Сигнальный процессор или процессорный модуль 10a
В качестве примера, функциональные возможности сигнального процессора или процессорного модуля 10a могут воплощаться, используя аппаратные средства, программное обеспечение, аппаратно-программное обеспечение или их комбинацию. В типичном воплощении программного обеспечения, сигнальный процессор или процессорный модуль 10a включал бы в себя одну или более архитектур на основе микропроцессора, имеющих, например, по меньшей мере один подобный сигнальному процессору или микропроцессору элемент 10a. Специалист в данной области имел бы возможность запрограммировать такое воплощение на основе микроконтроллера, или на основе микропроцессора, для выполнения функциональных возможностей, описанных здесь, без ненужного экспериментирования. Например, сигнальный процессор или процессорный модуль 10a может быть выполнен, например, специалистом в данной области без ненужного экспериментирования, с возможностью ответа на сигнализирования, содержащего информацию об установленной точке и скорости, относящуюся к одному или более насосам в насосной системе, например, включая бустерную систему с множеством насосов переменной скорости, работающей при по существу постоянном выходном давлении, в соответствии с тем, что раскрыто здесь.
Кроме того, сигнальный процессор или процессорный модуль 10a может быть выполнен, например, специалистом в данной области без ненужного экспериментирования, с возможностью определения регулирования установленной точки для компенсации потерь на трение системы и поддержания по существу постоянного выходного давления бустерной системы с множеством насосов переменной скорости для изменения расхода, на основании, по меньшей мере частично, полученного сигнализирования, в соответствии с тем, что раскрыто здесь.
Объем изобретения не подразумевается ограничиваться на каком-либо конкретном воплощении, используя технологию, известную либо в настоящее время, либо позже разработанную в будущем. Объем изобретения подразумевает включать воплощение функциональных возможностей процессоров 10a в качестве автономного процессора или процессорного модуля, в качестве отдельного процессора или процессорных модулей, а также некоторой их комбинации.
Установка 10 также может включать в себя, например, другие сигнальные процессорные схемы или составные элементы 10b, включая оперативное запоминающее устройство (ОЗУ) и/или постоянное запоминающее устройство (ПЗУ), устройства ввода/вывода и шины управления и данных, и адреса, соединяющие их, и/или по меньшей мере один входной процессор и по меньшей мере один выходной процессор.
Другие модули, подобные 52b, 54a и 54b
Логический, или компараторный, или ПИД-контроллерный модуль 52b, интерполяционный модуль 54a установленной точки и модуль 54b фильтра нижних частот - все могут воплощаться с сигнальными процессорами или сигнальными процессорными модулями, используя аппаратные средства, программное обеспечение, аппаратно-программное обеспечение или их комбинацию, в соответствии с тем, что задано касательно сигнального процессора или процессорного модуля 10a.
Объем изобретения
Следует понимать, что, если здесь не указано иное, любые признаки, характеристики, альтернативы или модификации, описанные касательно конкретного варианта осуществления здесь, также могут применяться, использоваться или объединяться с любым другим вариантом осуществления, описанным здесь. Также, чертежи здесь выполнены не в масштабе.
Хотя настоящее изобретение описано в качестве примера относительно центробежного насоса, объем изобретения предполагает включать его использование относительно других типов или видов насосов, известных либо в настоящее время, либо позже разработанных в будущем.
Хотя изобретения было описано и показано относительно его иллюстративных вариантов осуществления, вышеизложенные и различные другие дополнения и опущения могут быть выполнены в нем и относительно него, не отступая от идеи и объема настоящего изобретения.

Насосная система содержит модель управления в режиме постоянного давления, имеющую логический, компараторный или ПИД-контроллер и насосную модель, имеющую один или более работающих насосов. Контроллер выполнен с возможностью ответа на сигнализирование установленной точки и предоставления сигнализирования скорости. Насосная модель выполнена с возможностью ответа на сигнализирование скорости и управления одним или более работающими насосами, работающими по существу при постоянном выходном давлении. Логический контроллер насосной системы имеет сигнальный процессор или процессорный модуль, выполненный с возможностью ответа на сигнализирование скорости, а также на сигнализирование пользовательского ввода, содержащее информацию об установленной точке и скорости, относящуюся к одному или более работающим насосам в насосной системе. Также он выполнен с возможностью определения сигнализирования установленной точки, содержащего информацию о регулировании установленной точки для компенсации потерь на трение системы и поддержания по существу постоянного выходного давления насосной системы для изменения расхода с использованием интерполяции на основании отношения между минимальной установленной точкой для минимальной скорости и максимальной установленной точкой для максимальной скорости, чтобы найти значение отрегулированной установленной точки для скорости для поддержания по существу постоянного выходного давления насосной системы, в ответ на полученное сигнализирование скорости и сигнализирование пользовательского ввода. 2 н. и 19 з.п. ф-лы, 4 ил.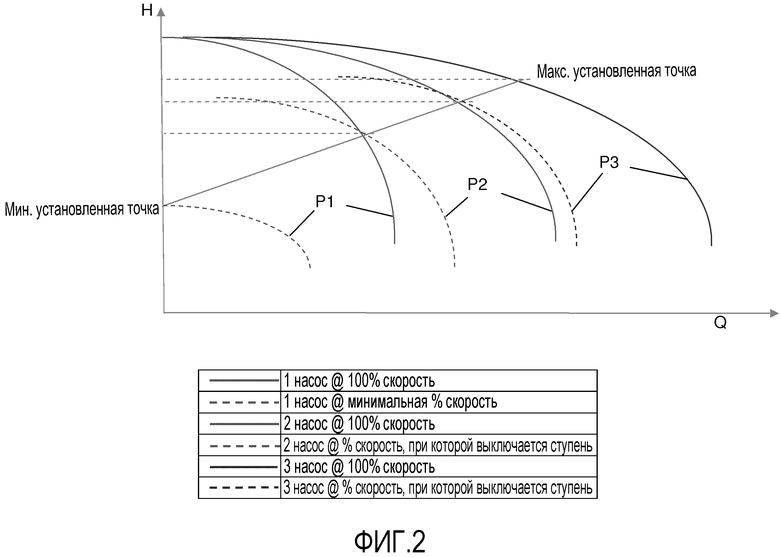
1. Насосная система, содержащая:
модель управления в режиме постоянного давления, имеющую логический, компараторный или ПИД-контроллер и насосную модель, имеющую один или более работающих насосов, причем логический, компараторный или ПИД-контроллер выполнен с возможностью ответа на сигнализирование установленной точки и предоставления сигнализирования скорости, при этом насосная модель выполнена с возможностью ответа на сигнализирование скорости и управления одним или более работающими насосами, работающими по существу при постоянном выходном давлении; и
логический контроллер насосной системы, имеющий сигнальный процессор или процессорный модуль, выполненный с возможностью
- ответа на сигнализирование скорости, а также на сигнализирование пользовательского ввода, содержащее информацию об установленной точке и скорости, относящуюся к одному или более работающим насосам в насосной системе, и
- определения сигнализирования установленной точки, содержащего информацию о регулировании установленной точки для компенсации потерь на трение системы и поддержания по существу постоянного выходного давления насосной системы для изменения расхода с использованием интерполяции на основании отношения между минимальной установленной точкой для минимальной скорости и максимальной установленной точкой для максимальной скорости, чтобы найти значение отрегулированной установленной точки для скорости для поддержания по существу постоянного выходного давления насосной системы, в ответ на полученное сигнализирование скорости и сигнализирование пользовательского ввода.
2. Система по п. 1, в которой сигнальный процессор или процессорный модуль выполнен с возможностью предоставления сигнализирования установленной точки для управления одним или более насосами в модели управления в режиме постоянного давления.
3. Система по п. 1, в которой сигнальный процессор или процессорный модуль выполнен с возможностью определения количества насосов, работающих в модели управления в режиме постоянного давления.
4. Система по п. 3, в которой сигнальный процессор или процессорный модуль выполнен с возможностью определения регулирования по меньшей мере частично на основании количества работающих насосов и заданной площади управления, относящейся к работающим насосам.
5. Система по п. 1, причем насосная система содержит бустерную систему с множеством насосов переменной скорости.
6. Система по п. 1, в которой логический контроллер насосной системы содержит интерполяционный модуль установленной точки, выполненный с возможностью осуществлять интерполяцию на основании отношения между минимальной установленной точкой для минимальной скорости и максимальной установленной точкой для максимальной скорости, чтобы найти значение отрегулированной установленной точки для скорости для поддержания по существу постоянного выходного давления насосной системы.
7. Система по п. 6, в которой интерполяционный модуль установленной точки выполнен с возможностью ответа на сигнализирование скорости и сигнализирование пользовательского ввода, использования интерполяции для определения значения установленной точки Y для скорости X и предоставления сигнализирования интерполяции, содержащего информацию о значении установленной точки Y для скорости X.
8. Система по п. 7, в которой логический контроллер насосной системы содержит модуль фильтра нижних частот, выполненный с возможностью ответа на сигнализирование интерполяции и предоставления сигнализирования интерполяции фильтра нижних частот, содержащего отфильтрованную по нижним частотам информацию об интерполяции, относящуюся к значению установленной точки Y для скорости X, которая принимает форму сигнализирования установленной точки, предоставленного для модели управления в режиме постоянного давления.
9. Система по п. 1, в которой модель управления в режиме постоянного давления выполнена с возможностью получения потока от трубопроводной или распределительной сети, имеющей напорные трубы для закачивания обратно в трубопроводную или распределительную сеть, и также выполнена с возможностью ответа на сигнализирование установленной точки, накачивания потока при по существу постоянном выходном давлении и предоставления сигнала скорости, содержащего информацию о скорости, относящейся к модели управления в режиме постоянного давления.
10. Система по п. 1, в которой сигнализирование пользовательского ввода содержит информацию о минимальном значении установленной точки, максимальных потерях давления, где Максимальное Значение Давления = Установленная Точка + Максимальные Потери Давления, и минимальном значении скорости.
11. Система по п. 1, в которой логический, компараторный или ПИД-контроллер выполнен с возможностью ответа на сигнализирование установленной точки, определения сигнализирования скорости, предоставления/подачи определенного сигнализирования скорости обратно на логический контроллер насосной системы и также предоставления определенного сигнализирования скорости на насосную модель.
12. Система по п. 11, в которой насосная модель выполнена с возможностью получения потока от трубопроводной и распределительной сети и также выполнена с возможностью ответа на сигнализирование установленной точки и накачивания потока при по существу постоянном выходном давлении.
13. Система по п. 2, в которой насосная модель выполнена с возможностью предоставления сигнализирования выходного давления, которое подается обратно на логический, или компараторный, или ПИД-контроллер; причем логический, или компараторный, или ПИД-контроллер выполнен с возможностью ответа на сигнализирование выходного давления и определения сигнализирования скорости на основании по меньшей мере частично полученного сигнализирования выходного давления.
14. Система по п. 1, причем насосная система содержит бустерную систему с множеством насосов переменной скорости; причем насосная модель содержит множество насосов, которые могут выборочно включаться и выключаться во время работы бустерной системы с множеством насосов переменной скорости.
15. Система по п. 1, в которой сигнальный процессор или процессорный модуль выполнен с возможностью
определения максимальных потерь давления насосной системы и заданной площади управления каждого насоса; и
определения максимальных потерь одного или более насосов на основании максимальных потерь давления насосной системы и заданной площади управления каждого насоса.
16. Система по п. 15, в которой сигнальный процессор или процессорный модуль выполнен с возможностью определения значения максимальных потерь одного или более насосов, которое используется для задания формы кривой управления установленной точкой.
17. Способ, содержащий этапы, на которых:
отвечают с помощью логического, компараторного или ПИД-контроллера в модели управления в режиме постоянного давления на сигнализирование установленной точки и предоставляют сигнализирование скорости,
отвечают с помощью насосной модели в модели управления в режиме постоянного давления на сигнализирование скорости и управляют одним или более работающими насосами в насосной модели по существу при постоянном выходном давлении,
отвечают с помощью сигнального процессора или процессорного модуля в логическом контроллере насосной системы на сигнализирование скорости, а также на сигнализирование пользовательского ввода, содержащее информацию об установленной точке и скорости, относящуюся к одному или более работающим насосам в насосной системе, и
определяют с помощью сигнального процессора или процессорного модуля сигнализирование установленной точки, содержащее информацию о регулировании установленной точки для компенсации потерь на трение системы и поддержания по существу постоянного выходного давления насосной системы для изменения расхода с использованием интерполяции на основании отношения между минимальной установленной точкой для минимальной скорости и максимальной установленной точкой для максимальной скорости, чтобы найти значение отрегулированной установленной точки для скорости для поддержания по существу постоянного выходного давления насосной системы на основании по меньшей мере частично полученного сигнализирования пользовательского ввода и сигнализирования скорости.
18. Способ по п. 17, причем способ содержит этап, на котором предоставляют сигнализирование установленной точки для компенсации потерь на трение системы и поддержания по существу постоянного выходного давления насосной системы.
19. Способ по п. 17, причем способ содержит этап, на котором определяют с помощью сигнального процессора или процессорного модуля количество насосов, работающих в модели управления в режиме постоянного давления.
20. Способ по п. 19, причем способ содержит этап, на котором определяют с помощью сигнального процессора или процессорного модуля регулирование на основании по меньшей мере частично количества работающих насосов и заданной площади управления, относящейся к одному или более работающим насосам.
21. Способ по п. 17, в котором насосная система является бустерной системой с множеством насосов переменной скорости.
| DANFOSS, VLT HVAC Drive Application Guide, December 2011, [retrieved on 14 March 2015 (14.03.2015)] | |||
| Retrieved from the internet: https://www.tacohvac.com/uploads/FileLibrary/Danfoss_VLT_HVAC_Drive_Application_Guide.pdf, с | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| US 20120173027 A1, 05.07.2012 | |||
| WO 2013090907 A1, 20.06.2013 | |||
| US 201007099 A1, 21.01.2010 | |||
| Приспособление для автоматического прекращения накачивания воздуха в резервуары керосино-капильных ламп и кухонь | 1926 |
|
SU11044A1 |

