Ссылка на связанные заявки
Настоящая заявка претендует на приоритет предварительной заявки на патент США №62/393,312 (Any Doct. №911-019.028-1/F-B&G-X0028US), зарегистрированной 12 сентября 2016 г., которая тем самым полностью включена в данный документ путем ссылки.
Предпосылки создания изобретения
1. Область техники
Настоящее изобретение относится к способу управления насосом, а более конкретно - к способу управления насосом в насосной системе.
2. Краткое описание уровня техники
Недавно предложены средства управления насосами переменной скорости с усовершенствованным графическим отображением работы насоса в реальном времени, экономией энергии и бессенсорными технологиями управления [см. ссылки 1-11, перечисленные ниже] для приложений с замкнутым циклом нагревания и охлаждения жидкости, напорного усилителя, промышленных и сельскохозяйственных приложений, например, как показано на фиг. 1. При использовании этих предложенных технических решений некоторые системные рабочие параметры или характеристические кривые насоса, как правило неизвестные, такие как системные характеристические кривые, адаптивная управляющая контрольная точка, давление или скорость потока (без датчиков) и т.д., могут стать известными и представимыми для инженеров и операторов, позволяя им лучше понять рабочее состояние насоса/системы/управления в режиме реального времени и облегчая задавание параметров управления насосом и рабочих параметров насоса.
Однако для правильной установки параметров и для работы насоса в неизвестной гидравлической системе все еще необходимы некоторые процедуры и опыт. Задача установки параметров и эксплуатации насосной гидравлической системы все еще остается трудоемкой даже при наличии быстрого стартового экрана.
Поэтому в промышленности все еще существует потребность в автоматической самоуправляемой насосной системе, включающей автоматическую установку и работу в незнакомой гидравлической системе и приводе, то есть, например, аналогично концепции автоматического самоуправляемого автомобиля в отрасли автоматических самоуправляемых автомобилей в автостроительной промышленности.
Сущность изобретения
Если кратко, настоящее изобретение предлагает техническое решение для автоматического самоуправляемого насоса (ASD-насос) для автоматического проектирования, установки и приведения в действие управления насосом. Средство управления ASD-насосом может содержать управляющие модули с автоматическим обнаружением и конфигурированием параметров насосов/двигателя/приводов, автоматическим обнаружением и распознаванием системы и потока, возможностью автоматического проектирования, управления, установки и самоуправления насосом, и передатчик данных для передачи сигналов датчиков и приводов посредством протокола связи. Следовательно, ASD-насос - это насос, интегрированный с удаленным или локально присоединенным средством управления насосом, которое имеет функции автоматического проектирования, управления, установки управления насосом и самоуправления насосом для любой неизвестной гидравлической системы. В ASD-насосе проектирование, установка и приведение в действие управления насосом будут значительно изменены и будут представлять собой модель с новыми свойствами в индустрии изготовления насосов.
Кроме того, настоящее изобретение основано на семействе технологий, которые раскрыты в вышеуказанных приложениях.
Конкретные варианты выполнения настоящего изобретения
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму автоматической самоуправляемой насосной системы, содержащей:
детектор насоса/двигателя/привода, сконфигурированный для приема измеренных сигналов, содержащих информацию о насосе/приводе, для работы в насосной гидравлической системе, например, хранящуюся с возможностью считывания в чипе подписи или установленном штриховом коде, который может быть считан сканером, и обеспечения базы данных соответствующих сигналов, содержащих информацию о параметрах, для обеспечения автоматического проектирования, установки и приведения в действие управления насосом с целью управления работой насоса/привода в насосной гидравлической системе на основе принятых указанных сигналов; и
модуль автоматического самоуправления и проектирования/установки управления, сконфигурированный для приема соответствующих сигналов базы данных и выдачи сигналов управления, содержащих информацию для обеспечения автоматического проектирования, установки и приведения в действие управления насосом для управления насосом/приводом с целью работы в насосной гидравлической системе на основе соответствующих принятых сигналов из базы данных.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать один или большее количество следующих признаков:
Детектор насоса/двигателя/привода может быть сконфигурирован для:
приема измеренных сигналов и обеспечения соответствующих сигналов, необходимых для автоматического проектирования, установки параметров и приведения в действие управления насосом, с целью управления насосом/приводом; и
прием сигналов из базы данных, содержащих информацию о параметрах для обеспечения автоматического проектирования, установки и приведения в действие управления насоса/привода и обеспечение соответствующих сигналов базы данных.
Детектор насоса/двигателя/привода может быть сконфигурирован для приема измеренных сигналов из передатчика данных, содержащих информацию, если автоматическая самоуправляемая насосная система содержит такой передатчик данных.
Модуль автоматического самоуправления и проектирования/установки управления может содержать:
модуль автоматического проектирования/установки управления,
сконфигурированный для приема соответствующих сигналов из базы данных, и обеспечения сигналов для автоматического проектирования/установки управления, содержащих информацию для обеспечения автоматического проектирования/установки управления; и
модуль автоматического самоуправления, сконфигурированный для приема сигналов автоматического проектирования/установки управления, и обеспечения сигналов управления, содержащих информацию для обеспечения автоматического проектирования, установки и приведения в действие управления насосом с целью управления насосом/приводом.
Автоматическая самоуправляемая насосная система может содержать базу данных насоса/двигателя/привода, сконфигурированную для приема измеренных сигналов и выдачи соответствующих сигналов базы данных.
База данных насоса/двигателя/привода может включать базы данных в рамках сервиса iCloud или на основе сервиса iCloud.
Согласно некоторым вариантам выполнения настоящего изобретения, настоящее изобретение может также принимать форму способа, включающего следующие шаги:
прием детектором насоса/двигателя/привода измеренных сигналов, содержащих информацию о насосе/приводе для работы в насосной гидравлической системе, например сигналов, хранящихся с возможностью считывания в чипе подписи или установленном штриховом коде, который можно считывать сканирующим устройством, и обеспечение соответствующей базы данных сигналов, содержащих информацию о параметрах для обеспечения автоматического проектирования, установки и приведения в действие управления насосом с целью управления насосом/приводом для работы в насосной гидравлической системе на основе принятых измеренных сигналов; и
прием модулем автоматического самоуправления и проектирования/установки управления соответствующих сигналов базы данных, и обеспечение сигналов управления, содержащих информацию для обеспечения автоматического проектирования, установки и приведения в действие управления насосом с целью управления насосом/приводом для работы в насосной гидравлической системе, на основе соответствующих принятых сигналов базы данных. Способ может также включать один или большее количество признаков, сформулированных здесь, например, совместимых со сформулированными здесь.
По сути, настоящее изобретение обеспечивает решение, отвечающее потребностям промышленности в автоматической самоуправляемой насосной системе, включая автоматическую установку и работу на неизвестной гидравлической системе и приводе, например, подобно концепции автоматического самоуправляемого автомобиля в различных отраслях автомобилестроения.
Кроме того, настоящее изобретение предлагает новое техническое решение, которое является дальнейшим развитием и основано на вышеуказанном семействе технологий, как раскрыто ниже.
Краткое описание чертежей
Чертежи содержат следующие фиг. 1-5, которые не обязательно выполнены в масштабе:
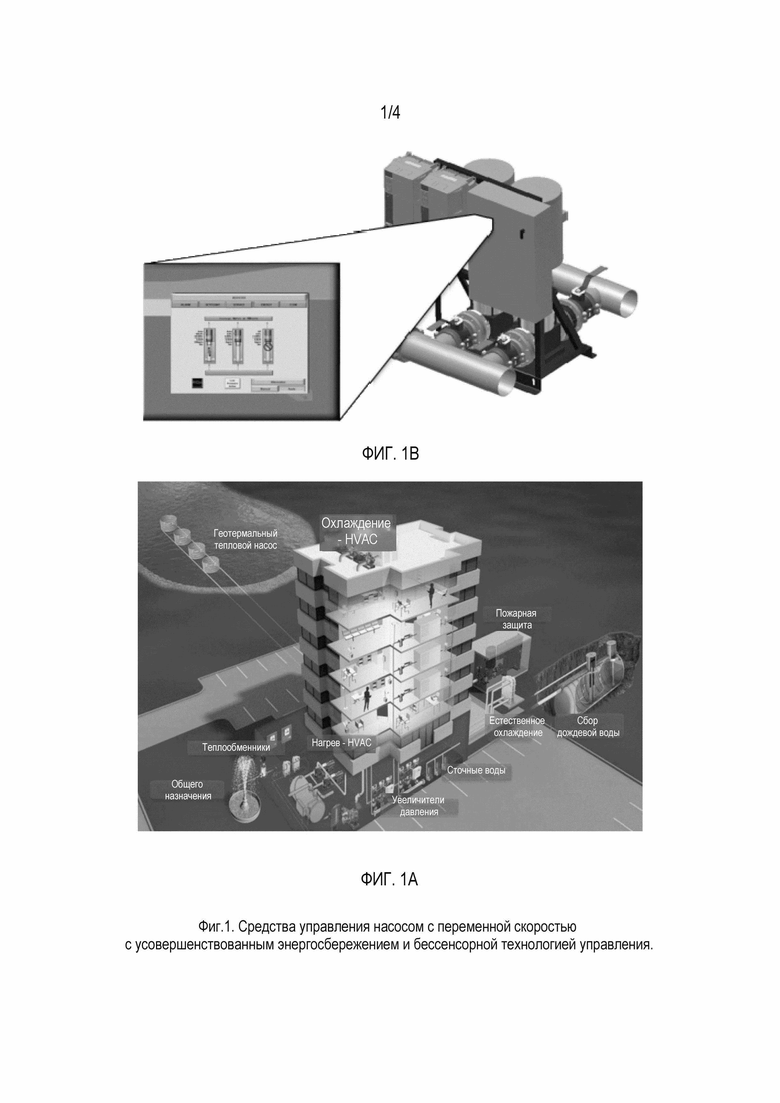
Фиг. 1 содержит фиг. 1А и фиг. 1В. На фиг. 1А показана диаграмма здания, строения или предприятия, имеющего, например, одну или большее количество систем отопления, вентиляции и кондиционирования воздуха (HVAC), теплообменников, бустеров давления, систем сбора дождевой воды, насосов для геотермальных вод, систем противопожарной защиты, систем удаления сточных вод и т.д., которые могут также содержать насосы, имеющие средство управления скоростью с усовершенствованной экономией энергии и технологией бессенсорного управления для управления процессами прокачки, показанными на фиг. 1В.
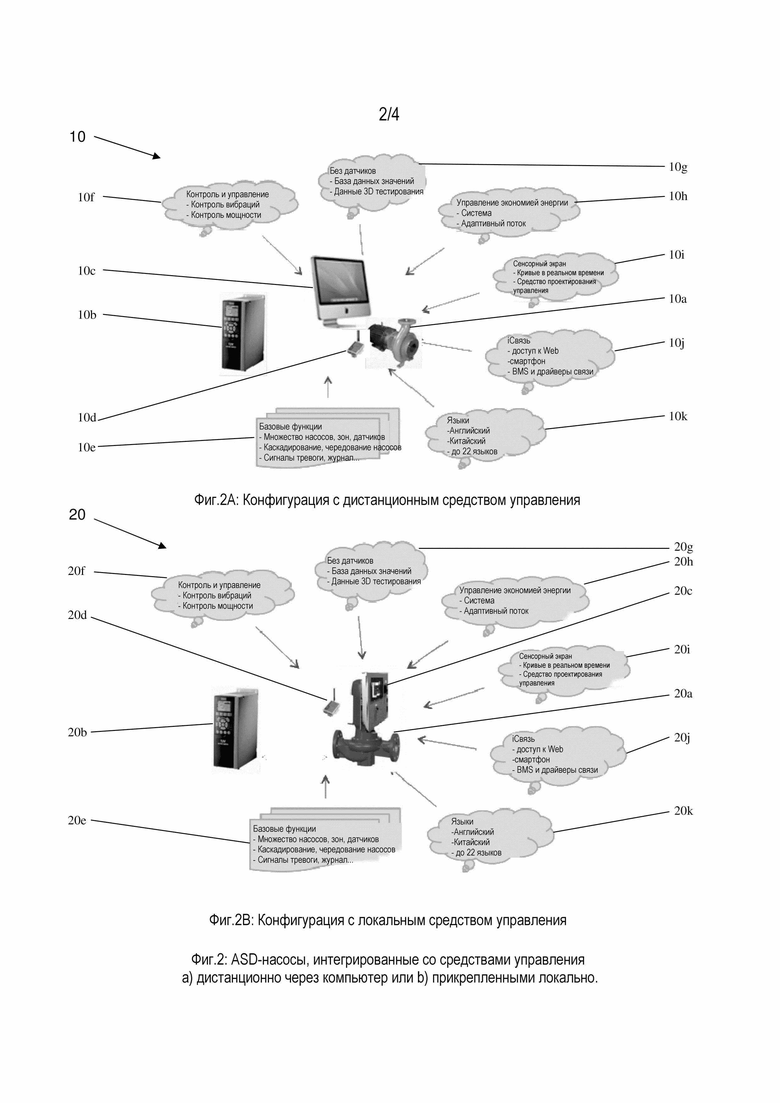
Фиг. 2 содержит фиг. 2А и фиг. 2В, на которых показаны ASD-насосы, интегрированные со средством управления насосом с удаленной конфигурацией на фиг. 2А и прикрепленным локально на фиг. 2В, согласно некоторым вариантам выполнения настоящего изобретения.
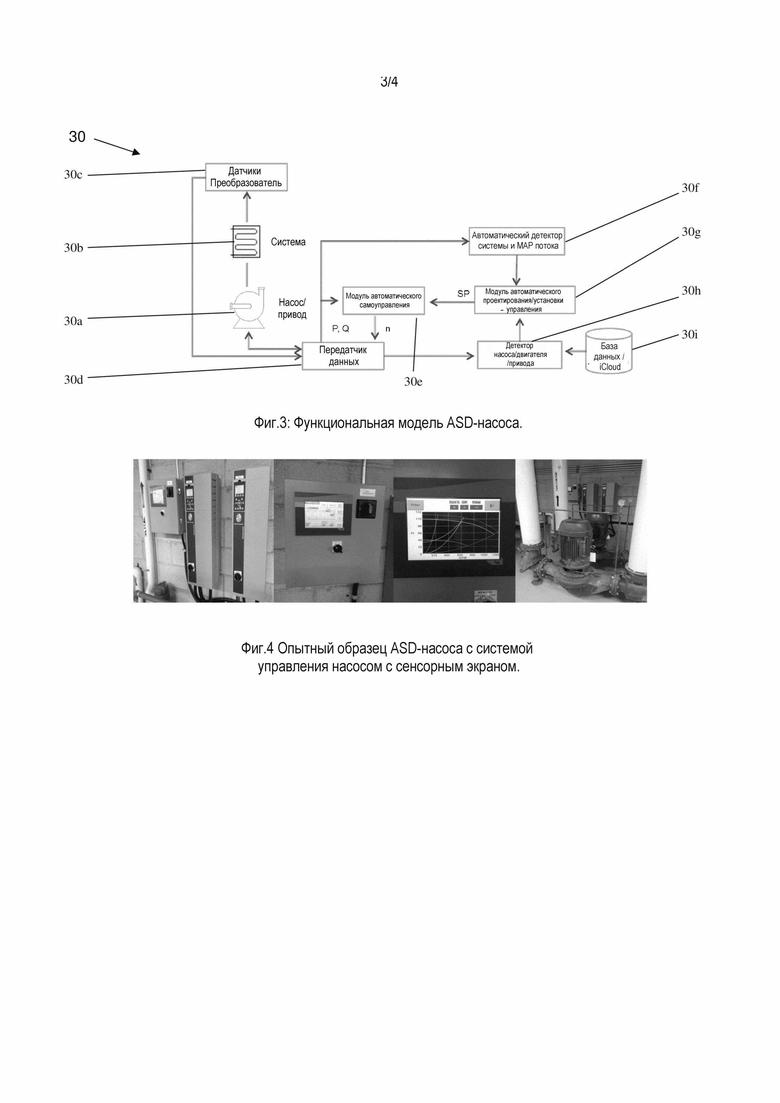
На фиг. 3 показана функциональная модель ASD-насоса согласно некоторым вариантам выполнения настоящего изобретения.
На фиг. 4 показаны фотографии опытного образца ASD-насоса с системой управления насосом, имеющей сенсорный экран, согласно некоторым вариантам выполнения настоящего изобретения.
На фиг. 5 показана блок-схема контроллера, содержащего сигнальный процессор или обрабатывающий модуль, сконфигурированный для обеспечения обработки сигнала для одного или более модулей согласно некоторым вариантам выполнения настоящего изобретения.
Следует отметить, что стрелки на чертежах даны только для примера, и не обозначают ограничения. Например, двунаправленную стрелку можно интерпретировать как представляющую первичную функцию, имеющую двунаправленную связь, в то время как однонаправленная стрелка может интерпретироваться как представляющая первичную функцию, имеющую однонаправленную связь. Однако, как очевидно специалистам в данной области техники, любая однонаправленная стрелка не ограничивает и не призвана ограничить обмен сигналами в другом направлении, например, который может являться частью первичной функции или частью вторичной функции, как, например, при операции «рукопожатия» при связи между любыми двумя такими модулями или устройствами.
Подробное описание изобретения
1. Введение
В целом, настоящее изобретение относится к автоматическому самоуправляемому насосу (ASD-насос) для автоматического проектирования, установки и приведения в действие управления насосом. Например, средство управления ASD-насоса может содержать управляющие модули с автоматическим обнаружением и конфигурированием параметров насосов/двигателя/приводов, автоматическую систему обнаружения и распознавания потока, автоматического проектирования, установки и самоуправления насоса, и передатчик данных для передачи сигналов датчиков и приводов посредством протокола связи. Следовательно, ASD-насос может содержать насос, интегрированный с удаленным или локально прикрепленным средством управления насосом, способным осуществлять автоматическое проектирование, установку и самоуправление насоса в любой неизвестной гидравлической системе. В ASD-насосе проектирование, установка и приведение в действие управления насосом значительно изменены и будут представлять собой новую модель в индустрии изготовления насосов.
2. Автоматические самоуправляемые насосы
Конфигурация ASD-насосов: Конфигурация ASD-насосов может включать следующее:
Автоматический самоуправляемый насос (в дальнейшем «ASD-насос») представляет собой интегрированную систему управления насосом, в целом обозначенную позицией 10, которая осуществляет автоматическое проектирование, установку и приведение в действие управления насосом в неизвестной гидравлической системе при экономии энергии, отсутствии датчиков, а также с некоторыми другими преимуществами, как показано на фиг. 2. ASD-насос содержит насос 10а, интегрированный со средством управления насосом (а) дистанционного (фиг. 2А) - с использованием компьютера 10b, 10с или (b) локального (фиг. 2В) - с прикрепленными средствами конфигурации управления, с использованием монитора с сенсорным экраном 20с, передатчик 10d, 20d данных, предназначенный для преобразования сигналов датчиков и передачи их в средства управления насосом посредством протокола связи, и сам частотно-регулируемый электропривод (VFD) соответственно.
Например, базовая функция 10е, 20е управления может включать управление и координирование работы множества насосов, зон и датчиков, наладку насоса, выработку сигнала тревоги, вход в систему, и т.д.; функции 10f, 20f контроля и управления могут включать мониторинг вибраций и питания; бессенсорные функции 10g, 20g могут включать базу данных числовых и трехмерных тестовых данных; функции 10h, 20h управления экономией энергии могут включать системное и адаптивное управление; функции 10i, 20i сенсорного экрана могут включать кривые истинного времени и инструменты проектирования управления; функции 10j, 20j связи могут включать доступ к сети, сервер посылки сообщений (BMS) для смартфонов и драйверов связи; а функции 10k, 20k языка могут включать английский, китайский и множество других языков, например, согласно функциям, показанным на фиг. 2А и фиг. 2В.
На фиг. 3 показана концепция ASD-насоса и функциональная модель 30 в целом, например, которая может содержать насос/привод 30а, систему 30b, преобразователь 30с датчиков, передатчик 30d данных, модуль 30е автоматического самоуправления, автоматический детектор 30f системы и MAP потока, модуль 30g автоматического проектирования/установки управления, автоматический детектор 30h насоса/двигателя/привода, и базу данных насоса/двигателя/приводов или iCloud 30i.
Здесь автоматический детектор 30h насоса/двигателя/привода может использоваться для и автоматического выбора и конфигурирования насосов, двигателей и приводов на основе их чипа подписи или установленного штрихового кода, который может быть автоматически считан в систему управления насосом установленным сканером. Например, их параметры (например, включая мощность, напряжение, фазу, угловую скорость, размер лопастей, данные по кривым насоса и т.д.) можно искать и конфигурировать автоматически в базе данных насоса/двигателя/привода или iCloud 30i автоматическим детектором 30h насоса/двигателя/привода на основе их подписей. Например, в соответствии с показанным на фиг. 3, при работе автоматический детектор 30h насоса/двигателя/привода принимает ассоциированные сигналы, содержащие информацию для выполнения или осуществления функции обработки сигналов этим автоматическим детектором насоса/двигателя/привода, ассоциированным с модулем 30g, определяет соответствующую сигнал SP, содержащий информацию из модуля 30g с целью осуществления функции обработки сигнала автоматическим детектором насоса/двигателя/привода на основе принятых сигналов; и выдает соответствующие сигналы SP из модуля 30g в автоматический самоуправляемый модуль 30е, как показано, в автоматической самоуправляемой насосной системе.
Автоматический детектор 30f системы и MAP потока может использоваться для получения скользящего среднего пика (MAP=Moving Average Peak) неизвестной системы, а также скорости потока в системе 30b. Автоматический детектор 30f системы и MAP потока может применяться не только для статической гидравлической системы, но также и для варьируемой системы. Например, пик MAP для автоматического детектора 30f системы и MAP потока может быть определен следующим образом:
где MAP - детектор скользящего среднего пика, Cυ системный коэффициент динамического трения, который может быть определен через системное уравнение потока  где АР - дифференциальное давление насоса,
где АР - дифференциальное давление насоса,  представляет собой MAP для
представляет собой MAP для 
Поскольку это детектор скользящего среднего пика для системного коэффициента и скорости потока,  и
и  полученные согласно уравнению (1), адаптивны к изменениям системы и скорости потока в зависимости от времени выборки и длины фильтра в скользящем среднем цифровых фильтров. Все эти параметры рассчитываются или устанавливаются автоматически после начального запуска ASD-насоса.
полученные согласно уравнению (1), адаптивны к изменениям системы и скорости потока в зависимости от времени выборки и длины фильтра в скользящем среднем цифровых фильтров. Все эти параметры рассчитываются или устанавливаются автоматически после начального запуска ASD-насоса.
Модуль 30g автоматического проектирования/установки управления может использоваться для конфигурирования адаптивной кривой управления и графических характеристических кривых насоса в реальном времени, а также рабочих параметров соответственно и автоматически. Уравнение адаптивного управления для вычисления адаптивной установочной точки давления SP(t) может быть определено следующим образом:

где b0 - минимальное давление при отсутствии потока, α - установочный параметр кривой управления, меняющийся в диапазоне 1≤α≤2 и определяющий промежуточный наклон между линейной и квадратичной кривыми. Все параметры в уравнении (2) устанавливаются автоматически после первоначального запуска ASD-насоса.
В примере, совместимом с фиг. 3, при работе автоматический детектор 30f системы и MAP потока принимает сигналы Р, Q, переданные передатчиком 30d данных, например, содержащие информацию для выполнения или осуществления его функции обработки автоматического детектора системы и MAP потока, ассоциированной с модулем 30f, определяет соответствующие сигналы, содержащие информацию из модуля 30f, для осуществления функций обработки автоматического детектора системы и MAP потока на основе принятых сигналов; и передает соответствующие сигналы в модуль 30g автоматического проектирования/установки управления в автоматической самоуправляемой насосной системе, как показано на чертежах.
Затем модуль 30е автоматического самоуправления может использоваться для вычисления желаемой скорости насоса n, которую получают с помощью пропорционально-интегрально-дифференциальной (ПИД) функции управления насосом относительно адаптивной заданной установочной точки SP давления и мгновенного значения давления из преобразователя давления или бессенсорного преобразователя.
Передатчик 30d данных, соединенный с ASD-насосом, используется, главным образом, для передачи сигналов датчиков и приводов для управления насосом дистанционно - в компьютер посредством протокола связи, или локально при присоединении к ASD-насосу. Здесь сигналы датчиков, передаваемые передатчиком 30d, могут содержать управляющие сигналы, такие как сигналы потока, давления, температуры и т.д., и сигналы мониторинга условий, такие как сигналы вибрации, мощности, или температуры. Приводные сигналы могут содержать все цифровые и аналоговые входные/выходные (10) сигналы, обеспечивающие управление приводом/насосом.
Все вышеуказанные сигналы могут быть переданы в средство управления насосом непосредственно, без ввода в передатчик 30d данных, если в приводе имеются достаточные терминалы для аналогового ввода.
В примере, совместимом с фиг. 3, при работе передатчик 30d данных принимает ассоциированные сигналы, содержащие информацию для выполнения, или осуществления его функции обработки сигналов передатчика данных, ассоциированной с модулем 30d, определяет соответствующие сигналы (например, содержащие сигналы Р, Q) содержащие информацию для модуля 30d, для осуществления функции обработки сигнала передатчика данных на основе принятых сигналов; и обеспечивает соответствующую передачу сигналов (например, включая передачу сигналов Р, Q) из модуля 30d в модуль 30е автоматического самоуправления, детектор 30h насоса/двигателя/привода и насос/привод 30а в автоматической самоуправляемой насосной системе, как показано на чертежах. В еще одном примере ассоциированные принятые сигналы могут содержать сигналы преобразователя датчика из преобразователей 30с датчика, сигналы n из самоуправляемого модуля 30е и сигналы насоса/привода из насоса/привода 30а, как показано на чертежах. В еще одном примере соответствующие сигналы могут содержать сигналы Р, Q передатчика данных, содержащие информацию о давлении и потоке, например, имеющиеся в автоматическом самоуправляемом модуле 30е, как показано на чертежах, а также сигналы передатчика данных, передаваемые в насос/привод 30а и детектор 30h насоса/двигателя/привода, как тоже показано на чертеже.
Преобразователь 30с датчиков может использоваться для преобразования бессенсорных сигналов системного давления и скорости потока. Для бессенсорного управления мощность или один из ее эквивалентных сигналов, например ток или вращающий момент, также могут быть преобразованы. В примере, совместимом с показанным на фиг. 3, при работе преобразователь 30с датчиков принимает ассоциированные сигналы, содержащие информацию для выполнения или осуществления функции обработки сигналов преобразователя датчиков, ассоциированную с модулем 30с (например, включая системные сигналы из системы 30b), определяет соответствующие сигналы, содержащие информацию для выдачи из модуля 30с функции обработки сигнала преобразователя датчиков на основе на принятых системных сигналов; и передает соответствующие сигналы из модуля 30с в передатчик 30d данных, как показано в автоматической самоуправляемой насосной системе.
Например, база данных насоса/двигателя/приводов или iCloud 30i может содержать данные для всех насосов, двигателей и приводов, включая мощность, напряжение, фазу, скорость вращения, размер лопастей, кривые насоса и т.д., и в этой базе данных можно проводить автоматический поиск и конфигурирование детектором 30b насоса/двигателя/привода.
ASD-насос представляет собой насос, интегрированный в систему управления насосом, который может устанавливаться и управляться автоматически на неизвестной гидравлической системе, в то время как насос/двигатель/привод конфигурируются автоматически из базы данных или iCloud 30i. В настоящем изобретении модель на фиг. 3, содержащая модуль 30е автоматического самоуправления, автоматический детектор 30f системы и MAP потока, и модуль 30g автоматического проектирования/установки управления - являются основными компонентами для работы ASD-насоса с точки зрения автоматических и самоуправляемых ключевых функций, в то время как автоматический детектор 30h насоса/двигателя/привода, передатчик 30d данных и преобразователь 30с датчиков являются фундаментальными функциональными модулями и предназначены для того, чтобы сделать эти функции реализуемыми и осуществимыми.
Процедуры установки и работы насоса:
Процедуры установки и работы насоса могут включать следующее: После того, как ASD-насос установлен и приведен в действие, средство управления насосом сначала собирает данные насоса, двигателя и привода посредством детектора 30h насоса/двигателя/привода на основе чипа подписи или установленного штрихового кода, сканированного в средство управления насосом, из базы данных или iCloud 30i автоматически.
ASD-насос может затем начать работу согласно своей кривой управления, соответствующей начальной установке, на основе данных насоса из детектора 30h насоса/двигателя/привода и мгновенных входных сигналов потока и давления, поступивших из датчиков или бессенсорного преобразователя. Проектная нагрузочная точка для  и
и  выводится непрерывно и соответственно автоматическим детектором 30f насоса/двигателя/привода.
выводится непрерывно и соответственно автоматическим детектором 30f насоса/двигателя/привода.
Затем можно определить уравнение кривой управления на основе проектной нагрузочной точки для  и
и  на спроектированной нагрузочной точке модулем 30g автоматического проектирования/установки управления. Другие параметры в уравнении управления, такие как минимальное давление
на спроектированной нагрузочной точке модулем 30g автоматического проектирования/установки управления. Другие параметры в уравнении управления, такие как минимальное давление  при отсутствии потока, установочный параметр α кривой управления, могут быть заранее определены по умолчанию для автоматического самоуправления.
при отсутствии потока, установочный параметр α кривой управления, могут быть заранее определены по умолчанию для автоматического самоуправления.
Затем насос может работать под управлением модуля автоматического самоуправления с желательной скоростью, которая получена с помощью ПИД-функции управления насосом относительно адаптивной установленной точки SP давления и мгновенного значения давления из преобразователя давления или бессенсорного преобразователя.
Затем ASD-насос работает автоматически и адаптивно по отношению к системе и изменению скорости потока, поскольку его уравнение управления, определенное проектной точкой, меняется относительно скользящего среднего максимума системы и скорости потока в системе, при наилучшей эффективности насоса и без сенсоров, если выбрана эта конфигурация.
Основные характеристики ASD-насосов
Основные характеристики ASD-насосов следующие:
ASD-насос - это насос, интегрированный со средством управления насосом, установленном (а) дистанционно (фиг. 2А) в компьютере или (b) прикрепленном локально (фиг. 2В), и передатчиком 30d данных, предназначенным для передачи сигналов и управляющих данных из датчиков и частотно-регулируемых электроприводов (VFD) в средства управления насосом посредством протокола связи.
* Возможность подключения к заранее выбранным насосам/двигателям/приводам с помощью чипа подписи автоматически на основе базы данных или iCloud 30i.
* Возможность подключения к любым неизвестным гидравлическим системам автоматически и независимо.
* Проектирование, установка и управление работой насоса производятся автоматически.
* Автоматическое самоуправляемое адаптивное средство контроля потока и системы на любых неизвестных гидравлических системах с возможностью экономии энергии.
* Бессенсорный способ формирования сигналов скорости потока и давления в насосе для управления и мониторинга.
* Набор инструментов для проектирования управления насосом для локального проектирования и установки управления насосом, если потребуется.
* Графическое отображение в реальном времени управления, характеристических кривых насоса и системы и рабочих параметров и состояния насосов.
* Возможность управления несколькими насосами.
* Хранение данных в iCloud, мониторинг и презентация.
Опытный образец ASD-насоса
На фиг. 4 показан опытный образец ASD-насоса, а именно:
На фиг. 4 опытный образец ASD-насоса, объединенный с локально прикрепленным средством управления насосом, обладает возможностями автоматического проектирования, установки и самоуправления насоса в любой неизвестной гидравлической системе. Следует отметить, что панель управления насосом снята во время тестирования и на последующих чертежах не показана.
Используя набор инструментов для проектирования управления насосом, интегрированный в контроллер насоса с сенсорным экраном (например, см. 20с) ASD-насоса, автоматически планируют, устанавливают и приводят в действие кривую управления насосом, отвечающие требованиям к системному потоку и давлению для неизвестной гидравлической системы. Кривая управления ASD-насосом может быть спроектирована и установлена автоматически с учетом насоса, привода и системных характеристических кривых в режиме реального времени на месте и в гибкой манере для любой неизвестной гидравлической системы, чтобы обеспечить максимальную эффективность насоса с точки зрения экономии энергии. Кроме того, вся информация о насосе, системе, операциях по управлению и считываемых значениях может быть отображена графически и численно, что значительно облегчает работу насоса и его обслуживание.
В примере, совместимом со сформулированным выше, опытный образец ASD-насоса на фиг. 4 по существу содержит преобразователь 30с датчиков, передатчик 30d данных, модуль 30е автоматического самоуправления, автоматический детектор 30f системы и MAP потока, модуль 30g автоматического проектирования/установки управления, автоматический детектор 30h насоса/двигателя/привода, и базу данных насоса/двигателя/приводов или iCloud 30i, например, совместимые с показанными на фиг. 3.
Здесь, автоматический детектор 30h насоса/двигателя/привода может использоваться для автоматического выбора насосов, двигателей и приводов, а также конфигурации на основе их чипа подписи или установленного штрихового кода. Автоматический детектор 30f системы и MAP потока может использоваться для получения скользящего среднего пика (MAP) неизвестной системы, а также скорости потока в системе. Модуль 30g автоматического проектирования/установки управления может использоваться для конфигурирования адаптивной кривой управления и графических характеристических кривых насоса в реальном времени и рабочих параметров соответственно и автоматически. Модуль 30е автоматического самоуправления может использоваться для вычисления адаптивной установочной точки давления, мгновенной скорости насоса посредством пропорционально-интегрально-дифференциального (ПИД) управления относительно вычисленной адаптивной установочной точки давления и мгновенного значения давления из преобразователя давления или бессенсорного преобразователя, и для работы ASD-насоса на этой скорости соответственно.
Передатчик 30d данных, соединенный с ASD-насосом как элемент 30а, используется для передачи и получения сигналов датчиков и сигналов привода из средства управления насосом.
Совместимый со сформулированным выше опытный образец ASD-насоса, показанный на фиг. 4, представляет собой интегрированный насос и систему управления насосом, которая может быть спроектирована, установлена и приведена в действие автоматически на любых неизвестных гидравлических системах, при этом параметры насоса/двигателя/привода и данные в средстве управления конфигурируются автоматически из базы данных на основе их чипа подписи. В настоящем изобретении, показанном на фиг. 4, автоматический детектор 30f системы и MAP потока, модуль 30g автоматического проектирования/установки управления и модуль 30е автоматического самоуправления являются основными компонентами ASD-насоса с точки зрения ключевых признаков автоматизации и самоуправления, в то время как автоматический детектор 30h насоса/двигателя/привода, передатчик 30d данных и преобразователь 30d датчиков являются фундаментальными функциональными модулями для реализации соответствующих функций.
Модуль экономии энергии, отслеживающий вариации наружной температуры, и функциональный модуль, учитывающий суточные колебания температуры (день-ночь), может быть интегрирован в набор проектирования управления насосом в средстве управления ASD-насосом для экономии энергии, идущей на работу насоса с учетом этих рассмотренных экологических обстоятельств.
Если модуль распознавания гидравлической системы и детектор пика движущегося потока интегрированы в систему и средства адаптивного управления потоком, функции автоматического проектирования, установки и приведения в действие управления насосом можно реализовать автоматически, рассчитывая желательную планируемую рабочую точку насоса, а также установочную точку давления. Для этого оператор нажимает кнопку «Auto Cntrl» на наборе инструментов проектирования насоса, и управление насосом может быть спроектировано, установлено и приведено в действие автоматически для известной или неизвестной гидравлической системы при минимальном потреблении энергии насосом.
Сигналы потока и давления для управления ASD-насосами могут генерироваться бессенсорным преобразователем или датчиками с получением в реальном времени характеристических кривых насоса, системы и управления соответственно.
И наконец, графический сенсорный дисплей (например, 20с на фиг. 2В) в наборе инструментов проектирования управления насосом для ASD-насосов будет одним из лучших кандидатов для вывода проектной точки, а также вывода кривых и рабочих данных. Однако для управления ASD-насосами в наборе инструментов проектирования управления насосом можно использовать некоторые дешевые программируемые логические устройства (PLD) или даже печатные платы программируемого контроллера.
Итак, согласно некоторым вариантам выполнения настоящего изобретения, ASD-насос можно спроектировать, установить и привести в действие автоматически при любых видах приводов, высокого уровня или низкого уровня и т.д., и эксплуатировать на любых неизвестных статических или вариативных системах. Программное обеспечение средств управления ASD-насосами может быть оптимально сконфигурировано в удаленном компьютере посредством протокола связи или в локально прикрепленном ПИД-контроллере насоса. Всю информацию о потреблении энергии, скорости потока и давлении для необходимых сигналов управления и контроля получают из бессенсорного преобразователя или датчиков. Передатчик данных используется для преобразования и/или передачи сигналов всех датчиков из насосов и приводов в контроллер насоса посредством протоколов связи. Передатчик может быть интегрирован в насос непосредственно или быть встроен в привод в виде сопроцессора.
Краткое изложение вариантов выполнения настоящего изобретения Согласно некоторым вариантам выполнения настоящего изобретения, оно может включать или принимать форму реализаций, в которых ASD-насос содержит, прежде всего, насос, интегрированный с удаленным или локально прикрепленным средством управления насосом, которое обладает функциями автоматического проектирования, установки управления и самоуправления насоса в любой неизвестной гидравлической системе; привод, датчики или бессенсорный преобразователь и передатчик данных. Автоматический самоуправляемый насос (ASD-насос) представляет собой интегрированную систему управления насосом, которая автоматически проектирует, устанавливает и приводит в действие насос в неизвестной гидравлической системе, при этом ее преимуществами является экономия энергии, отсутствие датчиков и некоторые другие, как показано на фиг. 2. ASD-насос содержит насос, интегрированный со средствами управления насосом (а) дистанционно в компьютере или (b) при локальном соединении, передатчик данных для преобразования сигналов датчиков и передачи их в средство управления посредством протокола связи, и частотно-регулируемый электропривод (VFD), соответственно.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых средство управления насосом в ASD-насосе содержит автоматический детектор 30h насоса/двигателя/привода, автоматический детектор 30f системы и MAP потока, модуль 30g автоматического проектирования/установки управления, модуль 30е автоматического самоуправления, передатчик 30d данных, преобразователь 30с датчиков, базу данных насоса/двигателя/приводов или iCloud 30i и модуль встроенных программ привода, как показано и описало в отношении фиг. 2 и 3.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых детектор 30h насоса/двигателя/привода содержит алгоритмы поиска для автоматического выбора и конфигурирования насосов, двигателей и приводов на основе их чипа подписи или штрихового кода, который может быть автоматически считан в систему управления насосом устаноленным сканирующим устройством. Их параметры, включая мощность, напряжение, фазу, скорость вращения, размер лопастей, данные функциональных кривых насоса и т.д., можно искать в базе данных насоса/двигателя/привода или iCloud 30i и конфигурировать автоматически посредством детектора 30h насоса/двигателя/привода на основе их подписей.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых автоматический детектор 30f системы и MAP потока в средстве управления насосом в ASD-насосе содержит управляющий модуль для получения скользящего среднего пика (MAP) неизвестной системы, а также скорости потока в системе, описываемой уравнением (1). Автоматический детектор 30f системы и MAP потока может применяться не только в статической гидравлической системы, но также и в вариативной системе. Поскольку речь идет о детекторе скользящего среднего пика в системном коэффициенте и скорости потока  и
и  полученные через MAP из уравнения (1), адаптивны к системе и изменениям скорости потока в зависимости от времени выборки и длины фильтра в цифровых фильтрах скользящего среднего. Все эти параметры вычисляются и устанавливаются автоматически после первоначального пуска ASD-насоса.
полученные через MAP из уравнения (1), адаптивны к системе и изменениям скорости потока в зависимости от времени выборки и длины фильтра в цифровых фильтрах скользящего среднего. Все эти параметры вычисляются и устанавливаются автоматически после первоначального пуска ASD-насоса.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых модуль 30g автоматического проектирования/установки управления в средстве управления насосом в ASD-насосах содержит управляющий модуль, который используется для вычисления адаптивной установочной точки давления в уравнении (2). Все другие параметры в уравнении (2) устанавливаются автоматически после запуска ASD-насоса.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых модуль 30е автоматического самоуправления в средстве управления насосом в ASD-насосах содержит управляющий модуль, который предназначен для вычисления скорости насоса n средством ПИД-управления насосом по отношению к адаптивной установочной точки давления SP и мгновенному значению давления из преобразователя давления или бессенсорного преобразователя.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых передатчик данных содержит передатчик 30d данных, используемый, главным образом, для передачи сигналов датчиков и привода в средство управления насосом посредством протокола связи. Здесь, сигналы датчиков, передаваемые передатчиком 30d данных, могут содержать управляющие сигналы, такие как поток, давление, температуру и т.д., и сигналы мониторинга состояния, такие как вибрация, мощность или теплота. Сигналы привода могут содержать все эти цифровые и аналоговые сигналы ввода/вывода (10) для управления приводом/насосом. Все вышеуказанные сигналы могут передаваться в средство управления насосом непосредственно без прохождения через передатчик 30d данных, если привод может обеспечить достаточное количество входных аналоговых терминалов.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых преобразователь датчика (датчиков) содержит преобразователь датчиков 30с, который используется для преобразования бессенсорных сигналов давления и скорости потока в системе. Для бессенсорного управления можно также преобразовывать сигнал мощности или одного из ее эквивалентов, таких как ток или вращающий момент.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых база данных насоса/двигателя/приводов содержит базу данных или iCloud 30i, которая содержит данные обо всех насосах, двигателях и приводах, включая мощность, напряжение, фазу, скорость вращения, размер лопастей, функциональные кривые насоса, кривые мощности и т.д., и в этой базе данных можно производить автоматический поиск и конфигурирование детектором 30h насоса/двигателя/привода.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых ASD-насосы содержат модуль экономии энергии, учитывающий вариации наружной температуры, а также функциональный модуль учета суточных колебаний температуры (день-ночь), который может быть интегрирован в набор инструментов проектирования управления насосом в средстве управления ASD-насосами, для экономии рабочей энергии с учетом рассмотренных экологических обстоятельств.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых сигналы потока и давления для управления экономией энергии в ASD-насосах обеспечиваются или бессенсорным преобразователем, или датчиками, чтобы получить в реальном времени характеристические кривые насоса, системы и управления, выведенные на дисплей.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых ASD-насосы содержат графический сенсорный дисплей, входящий в набор инструментов проектирования управления насосом, для автоматического выбора планируемой точки и для отображения кривых и рабочих данных. Для управления ASD-насосами в наборе инструментов проектирования управления насосом можно использовать некоторые дешевые программируемые логические устройства (PLD) или даже печатные платы программируемого контроллера.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых насосная гидравлическая система содержит все насосные гидравлические системы замкнутого цикла или незамкнутого цикла, такие как магистральные насосные системы, вторичные насосные системы, системы циркуляции воды, и напорные гидравлические системы. Упомянутые здесь системы могут содержать единственную зону или множественных зон.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых сигналы параметров жидкости, выводимые датчиками или бессенсорным преобразователем, включают дифференциальное давление насоса, давление в системе или в зоне, скорости потока в системе или в зоне и т.д.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых передаваемые управляющие сигналы и технологии передачи сигналов, упомянутые здесь, включают все известные технологии измерения и передачи сигналов, используемые в настоящее время. Предпочтительно, пригодными и оптимальными являются беспроводные технологии передачи сигналов датчика.
Согласно некоторым вариантам выполнения настоящего изобретения, оно может содержать или принимать форму реализаций, в которых насосы для гидравлических насосных систем содержат единственный насос, циркуляционный насос, группу параллельно сгруппированных насосов или циркуляционных насосов, группу последовательно сгруппированных насосов или циркуляционных насосов или их комбинации.
Семейство связанных технических решений
Настоящее раскрытие связано с семейством раскрытий, включая, например:
Ссылка [1]: [911-019-001-2 (F-B&G-1001)] Andrew Cheng and James Gu, под названием "Method and Apparatus for Pump Control Using Varying Equivalent System Characteristic Curve, a/k/a an Adaptive Control Curve", имеющая порядковый номер заявки 12/982286, и опубликованная как патент США №8700221.
Ссылка [2]: [911-019-004-3 (F-B&G-X0001] Andrew Cheng, James Gu and Graham Scott, под названием "Dynamic Linear Control Methods And Apparatus For Variable Speed Pump Control", имеющая порядковый номер заявки 13/717086 от 17 декабря 2012 г., заявляющая приоритет заявки №61/576737 от 16 декабря 2011 г..
Ссылка [3]: [911-019-009-2 (F-B&G-X0005)] Andrew Cheng, James Gu, Graham Scott, под названием "3D Sensorless Conversion Means and Apparatus for Pumping System Pressure and Flow", имеющая номер заявки 14/091795 от 27 ноября 2013 г. и заявляющая приоритет заявки №61/771375 от 1 марта 2013 г.
Ссылка [4]: [911-019-010-3 (F-B&G-X0008)] Andrew Cheng, James Gu and Graham Scott, под названием "A Mixed Theoretical and Discrete Sensorless Converter for Pump Differential Pressure and Flow Monitoring", имеющая номер заявки 14/187817 и заявляющая приоритет заявки №61/803258, от 19 марта 2013 г.
Ссылка [5]: [911-019-012-2 (F-B&G-X0010)] Andrew Cheng, James Gu and Graham Scott, под названием "Sensorless Adaptive Pump Control with Self-Calibration Apparatus for Hydronic Pumping Systems", имеющая номер заявки 14/339594 от 24 июля 2014 и заявляющая приоритет заявки №61/858,237 от 25 июля 2013 г.
Ссылка [6]: [911-019-014-2 (F-B&G-X0012)] Andrew Cheng, James Gu and Graham Scott, под названием "Best-Fit Affinity Sensorless Conversion Means Or Technique For Pump Differential Pressure And Flow Monitoring", имеющая номер заявки 14/680667 от 7 апреля 2015 г. и заявляющая приоритет заявки №61/976749, от 8 апреля 2014 г.
Ссылка [7]: [911-019.015-3 (F-B&G-X0013)] Andrew Cheng, James Gu and Graham Scott, под названием "System and Flow Adaptive Pumping Control Apparatus - A Minimum Pumping Energy Operation Control System vs. Sensorless Application," имеющая номер заявки 14/730871 и заявляющая приоритет заявки №62/007474 от 4 июня 2014.
Ссылка [8]: [911-019-017-3 (F-B&G-X0015] Andrew Cheng and James Gu, под названием "A Discrete Valves Flow Rate Converter Device," having application no. 14/969723 от 15 декабря 2015 г., имеющая номер заявки 62/091965 от 15 декабря 2014 г.
Ссылка [9]: [911-019-019-1 (F-B&G-X0016)] Andrew Cheng and James Gu, под названием "No Flow Detection Means for Sensorless Pumping Control Applications," имеющая номер заявки 15/044,670, от 16 февраля 2016 г. и заявляющая приоритет заявки №62/116031 от 13 февраля 2015 г.
Ссылка [10]: [911-019-020-1 (F-B&G-X0020] Andrew Cheng, James Gu and Kyle Schoenheit, под названием "Direct numerical Sensorless conversion apparatus for pumping control," имеющая номер заявки 15/173781 от 6 июня 2016 и заявляющая приоритет заявки №62/170977 от 4 июня 2015.
Ссылка [11]: [911-019-022-1 (F-B&G-X0022] Andrew Cheng, James Gu and Kyle Schoenheit, под названием "Advanced Real Time Graphic Sensorless Energy Saving Pump Control System," имеющая номер заявки 15/217070 от 22 июня 2016 г. и заявляющая приоритет заявки №62/196355 от 24 июля 2015 г.
Все перечисленные документы полностью включены в настоящее описание путем ссылки.
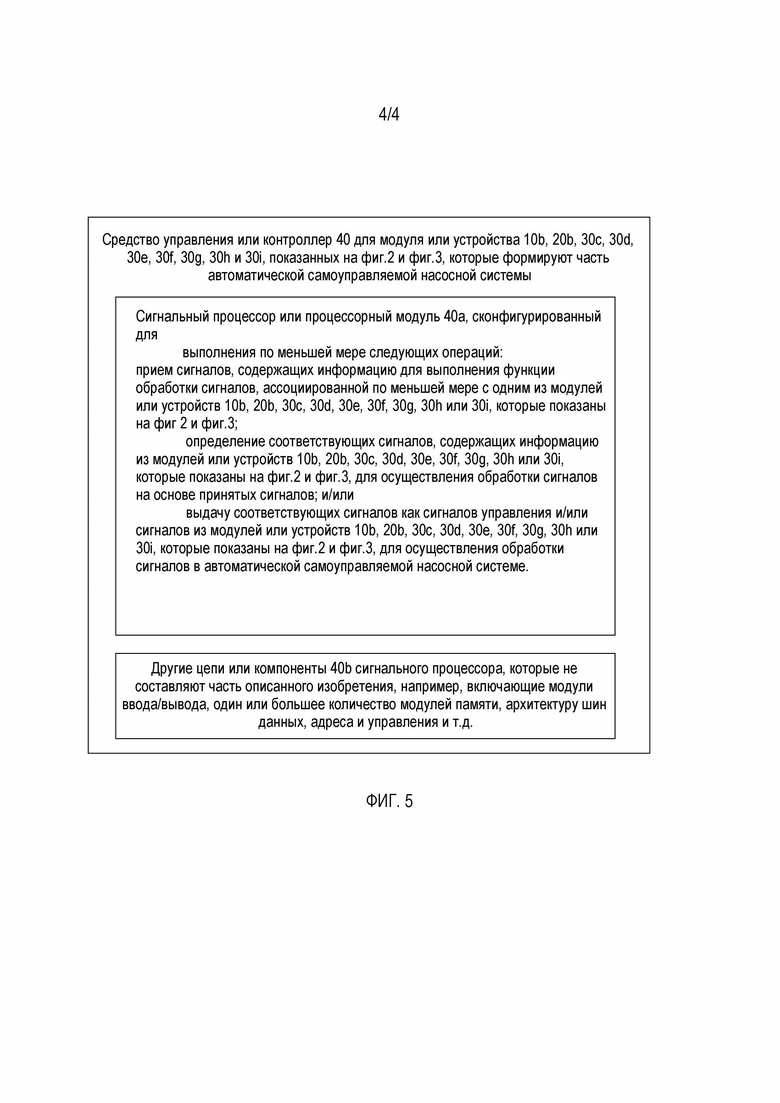
Фиг. 5: Выполнение обработки сигналов
В качестве примера на фиг. 5 показано средство управления или контроллер 40 для модуля или устройства 10b, 20b 30с, 30d, 30е, 30f, 30g, 30h или 30i, показанных на фиг. 2 и фиг. 3, которое составляет часть автоматической самоуправляемой насосной системы. Средство управления или контроллер 40а содержит сигнальный процессор или обрабатывающий модуль, сконфигурированные для выполнения по меньшей мере следующих операций:
прием сигналов, содержащих информацию для выполнения функции обработки сигналов, ассоциированной по меньшей мере с одним из модулей или устройств 10b, 20b, 30с, 30d, 30е, 30f, 30g, 30h или 30i, которые показаны на фиг 2 и фиг. 3;
определение соответствующих сигналов, содержащих информацию из модулей или устройств 10b, 20b, 30с, 30d, 30е, 30f, 30g, 30h или 30i, которые показаны на фиг. 2 и фиг. 3, для осуществления обработки сигналов на основе принятых сигналов; и/или
выдачу соответствующих сигналов как сигналов управления и/или сигналов из модулей или устройств 10b, 20b, 30с, 30d, 30е, 30f, 30g, 30h или 30i, которые показаны на фиг. 2 и фиг. 3, для осуществления обработки сигналов в автоматической самоуправляемой насосной системе.
При работе сигнальный процессор или обрабатывающий модуль 40а могут быть сконфигурированы так, что обеспечивают наличие соответствующих сигналов в качестве сигналов управления для управления насосом или системой насосов, например, в качестве сигналов проектирования или конфигурирования или проектирования насоса или системы насосов, например таких, как система насосов в насосной гидравлической системе. Например, соответствующие сигналы могут также использоваться для управления насосной гидравлической системой.
Например, функция сигнального процессора или обрабатывающего модуля 40а может быть осуществлена с использованием аппаратных средств, программного обеспечения, встроенных программ или их комбинации. В типичной реализации программного обеспечения сигнальный процессор или обрабатывающий модуль 40а содержит один или большее количество элементов микропроцессорной архитектуры, например, по меньшей мере один сигнальный процессор или микропроцессор. Специалист в данной области техники способен создать подходящий программный код, например выполняемый в микроконтроллере или микропроцессоре, чтобы обеспечить функции, описанные выше, без излишнего экспериментирования. Например, специалист в данной области техники способен без излишнего экспериментирования сконфигурировать сигнальный процессор или обрабатывающий модуль для приема сигналов согласно настоящему изобретению. Кроме того, специалист в данной области техники способен без излишнего экспериментирования сконфигурировать сигнальный процессор или обрабатывающий модуль для определения соответствующих сигналов согласно настоящему изобретению.
Объем настоящего изобретения не ограничен какой-либо конкретной реализацией с использованием известной технологии или разработанной в будущем. Объем изобретения включает реализацию функций процессоров в виде автономного процессора, сигнального процессора или модулей сигнального процессора, а также отдельного процессора или модулей процессора и их комбинации.
Сигнальный процессор или обрабатывающий модуль 40а могут также содержать, например, другие цепи или компоненты 40b сигнального процессора, включая память произвольного доступа (RAM) или модуль памяти и/или постоянную память (ROM), устройства и средства управления вводом-выводом, шины данных и адресные шины, соединяющие эти элементы, и/или по меньшей мере один процессор ввода и по меньшей мере один процессор вывода, что очевидно для специалиста в данной области техники. Например, сигнальный процессор или обрабатывающий модуль 40а, 40b могут содержать или принимать форму по меньшей мере одного сигнального процессора и по меньшей мере одной памяти, содержащей компьютерный программный код, при этом указанная по меньшей мере одна память и компьютерный программный код сконфигурированы так, чтобы при выполнении указанного кода по меньшей мере одним сигнальным процессором заставить сигнальный процессор по меньшей мере принимать сигналы и определять соответствующие сигналы, и передавать принятые сигналы. Сигнальный процессор или обрабатывающий модуль могут быть сконфигурированы посредством компьютерного программного кода так, чтобы осуществлять соответствующие алгоритмы обработки сигнала и/или функции согласно изобретению. Специалисту в данной области техники очевидно, как без излишнего экспериментирования осуществить такой компьютерный программный код для выполнения функций обработки сигнала, сформулированных выше, на основе изложенного в настоящем документе.
Компьютерный программный продукт
Настоящее изобретение может также принимать форму компьютерного программного продукта, имеющего считываемый компьютером носитель с выполняемым компьютером кодом, хранящимся там для осуществления указанного способа, например, при выполнении кода на сигнальном процессоре, который является частью такого контроллера насоса или вентилей. Например, компьютерный программный продукт иметь вид компакт-диска, дискеты, модуля памяти, карты памяти, а также другого типа или вида запоминающих устройств, которые могут хранить выполняемый компьютером код на таком считываемом компьютером носителе - как известном сейчас, так и разработанном в будущем.
Другие связанные заявки
Настоящая заявка связана с другими заявками на патенты, которые являются частью полного семейства технических решений, разработанных одним или более авторов настоящей заявки, и раскрыты в следующих заявках:
Заявка США №12/982286 (Any Dckt No. 911-019.001-1//F- B&G-1001), от 30 декабря 2010 г., под названием "Method and apparatus for pump control using varying equivalent system characteristic curve, AKA an adaptive control curve," которая опубликована как патент США №8700221 от 15 апреля 2014 г.; и
Заявка США №13/717086 (Адвокат Дкт №911-019.004-2//F-B&G-X0001), (Any Dckt No. 911-019.004-2//F- B&G-X0001), от 17 декабря 2012 г., под названием "Dynamic linear control methods and apparatus for variable speed pump control," которая претендует на приоритет заявки США №61/576737 от 16 декабря 2011 г., ныне оставлена без движения;
Заявка США №14/680667 (Any Dckt No. 911-019.014-2//F- B&G-X0012US01), от 7 апряля 2015 г., под названием "A Best-fit affinity sensorless conversion means for pump differential pressure and flow monitoring," которая претендует на приоритет заявки на патент 61/976749 от 8 апряля 2014 г., ныне оставлена без движения;
Заявка США №14/730871 (Any Dckt No. 911-019.015-2//F- B&G-X0013US01), от 4 июня 2015 г. под названием "System and flow adaptive sensorless pumping control apparatus energy saving pumping applications," которая претендует на приоритет заявки на патент №62/007474 от 4 июня 2014 г., ныне оставлена без движения; и
Заявка США №14/969,723 (Any Dckt No. 911-019.017-2//F-B&G- X0015US01), от 15 декабря 2015 г., под названием "Discrete valves flow rate converter," которая претендует на приоритет заявки на патент №62/091965 от 15 декабря 2014 г.;
Заявка на патент США №15/044670 от 16 февраля 2016 г. (Any Dckt No. 911-019.019-2/F-B&G-X0016US), под названием "Detection means for sensorless pumping control applications," которая претендует на приоритет заявки на патент №62/116031 от 13 февряля 2015 г. под названием "No flow detection means for sensorless pumping control applications",
при этом все перечисленные заявки принадлежат настоящему заявителю и все полностью включены в настоящий документ путем ссылки.
Объем изобретения
Подразумевается, что, если не сформулировано иначе, любой из признаков, характеристик, альтернатив или изменений, описанных в контексте конкретного варианта выполнения настоящего изобретения, может также быть применен, использован или объединен с любым другим вариантом выполнения настоящего изобретения, описанным здесь. Кроме того, чертежи выполнены не в масштабе.
Хотя настоящее изобретение описано на примере центробежного насоса, объем изобретения включает его использование с другими типами или видами насосов, как известных на сегодняшний день, так и разработанных в будущем.
Хотя изобретение было описано и проиллюстрировано на примере вариантов его выполнения, можно сделать различные добавления к нему и изъятия без отхода от сущности и объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Усовершенствованная система графического бессенсорного энергосберегающего управления насосами в режиме реального времени | 2016 |
|
RU2721446C2 |
| МЕТОДИКА ДЛЯ ИНСТРУМЕНТАЛЬНЫХ СРЕДСТВ НАСТРОЙКИ УПРАВЛЕНИЯ НАСОСОМ ДЛЯ НАСОСНЫХ СИСТЕМ С ПЕРЕМЕННОЙ СКОРОСТЬЮ | 2017 |
|
RU2753259C2 |
| АДАПТИВНОЕ БЕССЕНСОРНОЕ УПРАВЛЕНИЕ НАСОСОМ С УСТРОЙСТВОМ САМОКАЛИБРОВКИ ДЛЯ ЖИДКОСТНОЙ НАСОСНОЙ СИСТЕМЫ | 2014 |
|
RU2681390C2 |
| СИСТЕМА, ИСПОЛЬЗУЕМАЯ ПРИ ВОССТАНОВЛЕНИИ ТКАНЕЙ | 2011 |
|
RU2616994C2 |
| РЕЗЕРВУАР ДЛЯ ПОДАЧИ ПРОЯВИТЕЛЯ И СИСТЕМА ПОДАЧИ ПРОЯВИТЕЛЯ | 2018 |
|
RU2767161C2 |
| Устройство и способ для управления насосом | 2016 |
|
RU2702827C2 |
| Устройство для трехмерного бессенсорного преобразования дифференциального давления и расхода насоса | 2014 |
|
RU2685367C2 |
| Устройство (варианты) и способ для контроля перепада давления и расхода в насосе | 2015 |
|
RU2680474C2 |
| ХОЛОДИЛЬНАЯ УСТАНОВКА | 2007 |
|
RU2395759C2 |
| ПРЯМОЙ ЧИСЛЕННЫЙ АФФИННЫЙ БЕССЕНСОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ НАСОСОВ | 2016 |
|
RU2724390C2 |
Изобретение относится к способу управления насосом, а более конкретно к способу управления насосом в насосной системе. Автоматическая самоуправляемая насосная система содержит детектор насоса/двигателя/привода и модуль автоматического самоуправления и проектирования/установки управления. При работе детектор насоса/двигателя/привода принимает измеренные сигналы, содержащие информацию о насосе/приводе, для работы насосной гидравлической системы, например, хранящуюся с возможностью считывания в чипе подписи или установленном штриховом коде. При этом считывание может быть произведено сканером, и выдает соответствующие сигналы базы данных, содержащие информацию о параметрах для обеспечения автоматического управления проектирования, установки и приведения в действие насоса для управления насосом/приводом для работы в насосной гидравлической системе, на основе принятых измеренных сигналов. Модуль автоматического самоуправления и проектирования/установки управления принимает соответствующие сигналы базы данных и выдает сигналы управления, содержащие информацию для обеспечения автоматического проектирования, установки и приведения в действие управления насосом для управления насосом/приводом для работы в насосной гидравлической системе, на основе соответствующих принятых сигналов базы данных. Техническим результатом изобретения является обеспечение управления работой любой системой и снижение эксплуатационных расходов в системе. 2 н. и 9 з.п. ф-лы, 7 ил.
1. Автоматическая самоуправляемая насосная система, содержащая:
детектор насоса/двигателя/привода, сконфигурированный для приема измеренных сигналов, содержащих информацию о насосе/приводе, для работы в насосной гидравлической системе, и обеспечения базы данных соответствующих сигналов, содержащих информацию о параметрах, для обеспечения автоматического проектирования, установки и приведения в действие управления насосом для управления работой насоса/привода в насосной гидравлической системе на основе принятых измеренных сигналов; и
модуль автоматического самоуправления и проектирования/установки управления, сконфигурированный для приема соответствующих сигналов базы данных и выдачи сигналов управления, содержащих информацию для обеспечения автоматического проектирования, установки и приведения в действие управления насосом для управления насосом/приводом для работы в насосной гидравлической системе на основе соответствующих принятых сигналов из базы данных.
2. Автоматическая самоуправляемая насосная система по п. 1, в которой измеренные сигналы хранятся с возможностью считывания в чипе подписи или установленном штриховом коде, при этом считывание может производиться сканирующим устройством.
3. Автоматическая самоуправляемая насосная система по п. 1, в которой детектор насоса/двигателя/привода сконфигурирован так, чтобы осуществить:
прием измеренных сигналов и выдачу соответствующих сигналов, запрашивающих параметры, необходимые для обеспечения автоматического проектирования, установки и приведения в действие управления насосом для управления насосом/приводом; и
прием из базы данных сигналов, содержащих информацию о параметрах, для обеспечения автоматического проектирования, установки и приведения в действие управления насосом для управления насосом/приводом и обеспечения выдачи соответствующих сигналов базы данных.
4. Автоматическая самоуправляемая насосная система по п. 1, в которой детектор насоса/двигателя/привода принимает измеренные сигналы от передатчика данных, включая случай, когда автоматическая самоуправляемая насосная система содержит этот передатчик данных.
5. Автоматическая самоуправляемая насосная система по п. 1, в которой модуль автоматического самоуправления и проектирования/установки управления содержит:
модуль автоматического проектирования/установки управления, сконфигурированный для приема соответствующих сигналов базы данных, и выдачи сигналов для автоматического проектирования/установки управления, содержащих информацию для обеспечения автоматического проектирования/установки управления; и
модуль автоматического самоуправления, сконфигурированный для приема сигналов автоматического проектирования/установки управления и выдачи сигналов управления, содержащих информацию для обеспечения автоматического проектирования, установки и приведения в действие управления насосом для управления насосом/приводом.
6. Автоматическая самоуправляемая насосная система по п. 3, которая содержит базу данных насоса/двигателя/привода, сконфигурированную для приема измеренных сигналов и выдачи соответствующих сигналов базы данных.
7. Автоматическая самоуправляемая насосная система по п. 6, в которой база данных насоса/двигателя/привода содержит базу данных iCloud.
8. Способ самоуправления насосной системы, включающий:
прием детектором насоса/двигателя/привода измеренных сигналов, содержащих информацию о насосе/приводе, для работы в насосной гидравлической системе, и выдачу соответствующих сигналов базы данных, содержащих информацию о параметрах, для обеспечения автоматического проектирования, установки и приведения в действие управления насосом, для управления насосом/приводом для работы в насосной гидравлической системе на основе принятых измеренных сигналов; и
прием модулем автоматического самоуправления и проектирования/установки управления, соответствующих сигналов базы данных, и выдачу сигналов управления, содержащих информацию для обеспечения автоматического проектирования, установки и приведения в действие управления насосом для управления насосом/приводом для работы в насосной гидравлической системе, на основе соответствующих принятых сигналов базы данных.
9. Способ по п. 8, который включает сохранение информации в чипе подписи или в установленном штриховом коде и считывание этой информации, при этом указанное считывание может быть выполнено путем сканирования сканером измеренных сигналов.
10. Способ по п. 8, который включает прием детектором насоса/двигателя/привода измеренных сигналов от передатчика данных, включая случай, когда автоматическая самоуправляемая насосная система содержит этот передатчик данных.
11. Способ по п. 8, который включает использование в базе данных насоса/двигателя/привода базы данных iCloud.
| US 20010041139 A1, 15.11.2001 | |||
| US 20140249682 A1, 04.09.2014 | |||
| WO 2016106227 A1, 30.06.2016 | |||
| US 20140091153 A1, 03.04.2014 | |||
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДИНАМИЧЕСКОЙ ОЦЕНКИ ЭНЕРГОЭФФЕКТИВНОСТИ НАСОСНОГО ОБОРУДОВАНИЯ | 2014 |
|
RU2600202C2 |

