ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Настоящая заявка испрашивает приоритет по предварительной заявке США №62/007,474 (дело No. 911-019.015-1//F-B&G-X0013US), поданной 4 июня 2014 года под названием «System and Flow Adaptive Pumping Control Apparatus - A Minimum Pumping Energy Operation Control System vs. Sensorless Application» («Система и устройство адаптивного управления насосом - система управления работой насоса с минимальным энергопотреблением в сравнении с бездатчиковым применением»), которая включается во всей полноте в настоящий документ посредством ссылки.
Эта заявка также относится к семейству технологий, развитых одним или более из следующих изобретателей и раскрытых в следующих заявках:
[1] заявка на патент США серийный №12/982,286 (дело No. 911-019.001-1//F-B&G-1001), поданная 30 декабря 2010 года, под названием «Method and apparatus for pump control using varying equivalent system characteristic curve, AKA an adaptive control curve» («Способ и устройство для управления насосом с использованием изменяющийся характеристической кривой эквивалентной системы, известной как кривая адаптивного управления»), изданная в качестве патента США №8,700,221 15 апреля 2014 года;
[2] заявка на патент США серийный №13/717,086 (дело No. 911-019.004-2//F-B&G-X0001), поданная 17 декабря 2012 года, под названием «Dynamic linear control methods and apparatus for variable speed pump control» («Способы и устройство линейного динамического управления для управления насосом с регулируемой частотой вращения»), которая испрашивает приоритет по предварительной заявке на патент США №61/576,737, поданной 16 декабря 2011 года, в настоящее время отозванной;
[3] заявка на патент США серийный №14/091,795 (дело No. 911-019.009-2//F-B&G-X0005), поданная 27 ноября 2013 года, под названием «3D sensorless conversion method and apparatus» («Способ и устройство бездатчикового 3D преобразования»), которая испрашивает приоритет по предварительной заявке на патент США №61/771,375, поданной 1 марта 2013 года, в настоящее время отозванной;
[4] заявка на патент США серийный №14/187,817 (дело No. 911-019.010-2//F-B&G-X0008), поданная 24 февраля 2014 года, под названием «А Mixed Theoretical And Discrete Sensorless Converter For Pump Differential Pressure And Flow Monitoring» («Смешанный теоретический и дискретный бездатчиковый преобразователь для контроля дифференциального давления и расхода насоса»), которая испрашивает приоритет по предварительной заявке на патент США №61/803,258, поданной 19 марта 2013 года, в настоящее время отозванной;
[5] заявка на патент США серийный №14/339,594 (дело No. 911-019.012-2//F-B&G-X0010US01), поданная 24 июля 2014 года, под названием «Sensorless Adaptive Pump Control with Self-Calibration Apparatus for Hydronic Pumping System» («Бездатчиковое адаптивное управление насосом с устройством самокалибровки для жидкостной насосной системы», которая испрашивает приоритет по предварительной заявке на патент США серийный №14/339,594 (дело No. 911-019.012-1//F-B&G-X0010US01), поданной 24 июля 2014 года; и
[6] заявка на патент США серийный №14/680,667 (дело No. 911-019.014-2//F-B&G-X0012US01), поданная 7 апреля 2015 года, под названием «А Best-fit affinity sensorless conversion means for pump differential pressure and flow monitoring» («Бездатчиковое средство преобразования наилучшего приближения для контроля дифференциального давления и расхода насоса»), которая испрашивает приоритет по предварительной заявке на патент, серийный №61/976,749 (дело No. 911-019.014-1//F-B&G-X0012US01), поданная 8 апреля 2014 года,
которые все переуступлены правопреемнику текущей заявки на патент, и все они включены в нее посредством ссылки во всей полноте.
Настоящее изобретение основывается на семействе технологий, раскрытых в вышеупомянутых соответствующих заявках.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники
Настоящее изобретение относится к способу управления работой насоса и насосной системой и в частности настоящее изобретение относится к способу и устройству для управления и/или контроля насоса, например, в том числе для систем нагревания или охлаждения воды для хозяйственно-бытовых и коммерческих нужд.
2. Краткое описание предшествующего уровня техники
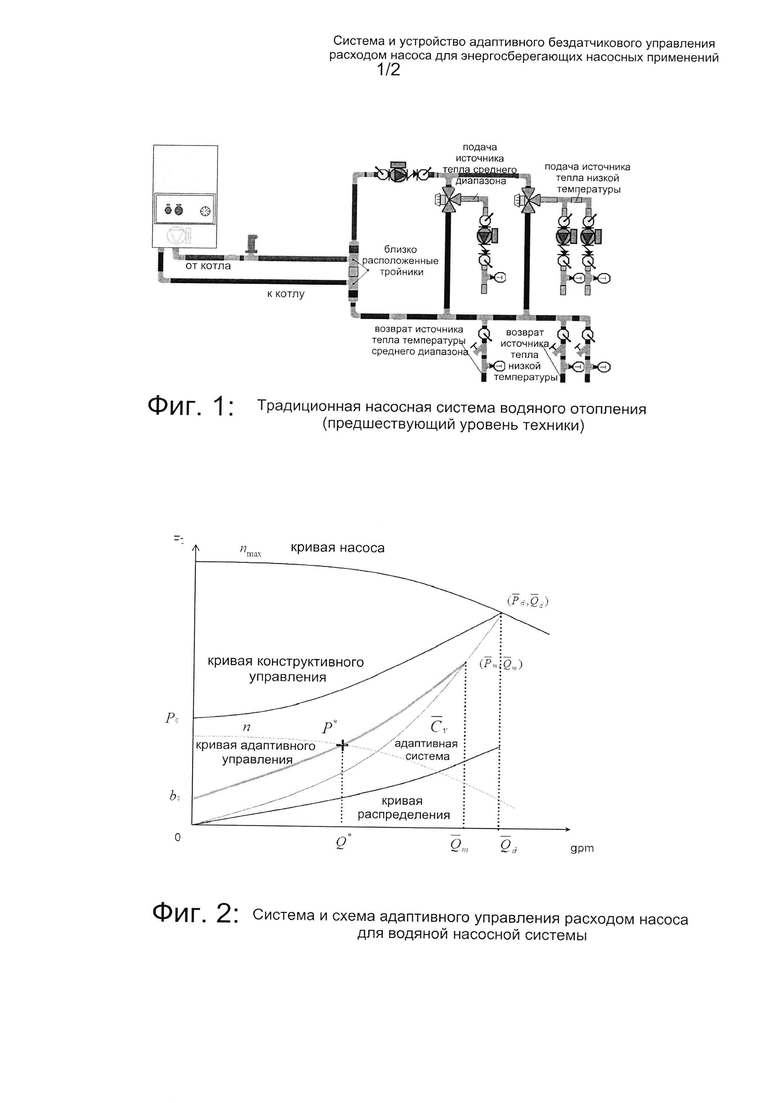
На фиг. 1 показана схематически известная система водяного отопления с постоянной насосной подачей, в которой горячая вода, подаваемая из бойлера с помощью первичного насоса, подается в зоны нагрева с помощью вторичного насоса и циркулирует в этих зонах с помощью циркуляционных насосов соответственно. Трехходовой клапан, управляемый датчиком температуры, отклоняет поступающую воду частично в зоны нагрева для поддержания расхода, необходимого для установки температуры в этих зонах, и отводит остальную часть поступающей воды в обводные трубопроводы, соответственно. Вследствие этой конструкции имеются существенные потери энергии в системе, в том числе потери энергии, вызванные гидродинамическим трением в обводных трубопроводах и клапанах, а также потери тепловой энергии в воде в обводных линиях.
В последнее время системы управления насосами с регулируемым числом оборотом, снабженные энергосберегающими средствами или способами управления, такими как управление по линейной кривой или управление по квадратичной кривой, были раскрыты для применений жидкостного насосного управления. Однако количество энергии, которое может быть сэкономлено с помощью этих средств или способов энергосберегающего управления в основном зависит от установки параметров управления, например, расчетных данных системы по давлению и расходу, которые неизвестны, в общем, оператору из-за сложности гидросистемы в процессы эксплуатации. Кроме того, расход в системе может изменяться время от времени в зависимости от настроек температуры, а также внешних погодных условий.
Ввиду этого существует потребность в промышленности в энергосберегающих средствах или способе управления, например, которые не только адаптивны к кривой системы, но и к расходу, с которым она также связана, так что энергопотребление насоса может быть оптимальным образом сэкономлено.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В суммарном виде настоящее изобретение предлагает новую и уникальную систему и средство или способ адаптивного управления расходом для водяной насосной системы нагревания или охлаждения, которая раскрывается в настоящем документе. В общем, кривая управления в системе и средство или способ адаптивного управления расходом могут быть установлены адаптивно по отношению к характеристической кривой системы, а также скользящему максимальному расходу. Считается, что в процессе работы уставка давления для системы и кривой адаптивного управления расходом для ПИД (т.е. пропорционально-интегрально-дифференциального) - регулятора числа оборотов насоса оказывается намного ближе к давлению в системе, необходимому для обеспечения расхода, который требуется в этой системе. Кроме того раскрывается система управления работой насосов с минимальным энергопотреблением, также в значительной мере опирающаяся на систему и средство или способ адаптивного управления расходом вместе с бездатчиковыми применениями.
Настоящая заявка предлагает способ, который является дальнейшим развитием вышеупомянутого семейства технологий, изложенных выше, и базируется на них.
Конкретные варианты осуществления
В соответствии с некоторыми вариантами осуществления настоящее изобретение может включать в себя, или принимать форму, устройство, которое характеризуется наличием сигнального процессора или модуля обработки, выполненного с возможностью по меньшей мере:
принимать сигнальную информацию, содержащую информацию о расходах, от бездатчиковых преобразователей в зонных циркуляционных насосах в зонах нагрева/охлаждения, управляемых датчиками температуры, в системе водяного отопления с целью извлечения адаптивной уставки давления, чтобы соответствовать расходам, запрашиваемым зонами нагрева/охлаждения, используя адаптивную систему и уравнение кривой управления расходом, при этом полученная сигнальная информация также содержит информацию об общих расходах, запрашиваемых зонными циркуляционными насосами; и
определять необходимые скорости работы насосов для зонных циркуляционных насосов, чтобы удовлетворять температурным требованиям в зонах нагрева на основе полученной сигнальной информации.
В соответствии с некоторыми вариантами осуществления настоящее изобретение может включать в себя один или несколько из следующих признаков:
Сигнальный процессор или модуль обработки может быть выполнен с возможностью предоставлять соответствующую сигнальную информацию, содержащую информацию о необходимых скоростях работы насоса.
Соответствующая сигнальная информация может содержать информацию, используемую для управления насосной водяной системой.
Сигнальный процессор или модуль обработки могут быть выполнены в виде, или являться составной частью, центральной панели управления насосом.
Зонные циркуляционные насосы могут включать в себя датчики для представления расходов, и устройство может также включать в себя датчики.
Сигнальный процессор или модуль обработки может быть выполнен с возможностью определять уравнение кривой адаптивного управления насосом на основе кривой адаптивной системы и в качестве скользящего максимального расхода системы, например, который зависит от соотношения между адаптивной уставкой давления, расходом в системе, запрашиваемой температурными нагрузками, минимальным давлением в отсутствии расхода, параметром установки кривой управления и адаптивными скользящими максимальными расходом и давлением.
В условиях работы и в качестве примера сигнальный процессор или модуль обработки может быть выполнен с возможностью:
1) определять уравнение кривой адаптивного управления насосом на основе адаптивной кривой системы и в качестве скользящего максимального расхода системы, используя уравнение (2.1) следующим образом:

где P*(t) представляет адаптивную уставку давления, Q*(t) является расходом в системе, запрашиваемым температурными нагрузками, b0 является минимальным давлением в отсутствии расхода, α является параметром установки кривой управления, изменяющейся в виде 1≤α≤2, определенным между линейной кривой и квадратичной кривой, а  и
и  являются адаптивными скользящими максимальными расходом и давлением; или
являются адаптивными скользящими максимальными расходом и давлением; или
2) определять сигнал расхода для использования в способе ПИД-регулирования расхода на основе уставки расхода в функции управления, используя уравнение (2.2) следующим образом:

в том числе тогда, когда сигнальный процессор или модуль обработки выполнен с возможностью принимать сигнал мгновенного давления Р*(t) от датчика давления.
Сигнальный процессор или модуль обработки может быть выполнен с возможностью принимать соответствующую сигнальную информацию, содержащую информацию о расходе Q*(t) в системе или давлении P*(t) от расходомера или датчика давления, или бездатчикового преобразователя, соответственно.
Для применения с множеством зон сигнальный процессор или модуль обработки может быть выполнен с возможностью определять расход Q*(t) в системе в виде суммы расходов в зонах, соответственно, используя уравнение (2.3) следующим образом:
где  является расходом для зоны i, а n является общим количеством зон, в том числе тогда, когда сигнальный процессор или модуль обработки выполнен с возможностью принимать соответствующую сигнальную информацию, содержащую информацию о расходе
является расходом для зоны i, а n является общим количеством зон, в том числе тогда, когда сигнальный процессор или модуль обработки выполнен с возможностью принимать соответствующую сигнальную информацию, содержащую информацию о расходе  в системе или давлении P*(t) от расходомера или датчика давления, или бездатчикового преобразователя в зоне i, соответственно.
в системе или давлении P*(t) от расходомера или датчика давления, или бездатчикового преобразователя в зоне i, соответственно.
Сигнальный процессор или модуль обработки может быть выполнен с возможностью определять соответствующую сигнальную информацию, относящуюся к адаптивному скользящему максимальному расходу  , с помощью детектора скользящего среднего или скользящих пиков, для расхода Q в системе, используя уравнение (2.4) следующим образом:
, с помощью детектора скользящего среднего или скользящих пиков, для расхода Q в системе, используя уравнение (2.4) следующим образом:

где функция MA(Q(t)) представляет детектор скользящего среднего, а функция MP(Q(t)) представляет детектор скользящих пиков, соответственно.
Сигнальный процессор или модуль обработки может быть выполнен с возможностью определять соответствующую сигнальную информацию, содержащую информацию о  , используя уравнение расхода следующим образом:
, используя уравнение расхода следующим образом:
 ,
,
в том числе тогда, когда сигнальный процессор или модуль обработки выполнен с возможностью определять соответствующую сигнальную информацию, содержащую информацию о характеристическом коэффициенте  адаптивной системы, используя характеристический коэффициент Cν эквивалентной системы, с помощью детектора скользящего среднего или максимума, определяемых в уравнении (2.4) соответствующим образом.
адаптивной системы, используя характеристический коэффициент Cν эквивалентной системы, с помощью детектора скользящего среднего или максимума, определяемых в уравнении (2.4) соответствующим образом.
Параметры  и
и  могут изменяться в диапазонах
могут изменяться в диапазонах  и
и  , в том числе тогда, когда характеристический коэффициент
, в том числе тогда, когда характеристический коэффициент  адаптивной системы может быть постоянным значением Cν, например, если расход системы регулируется циркуляционными насосами.
адаптивной системы может быть постоянным значением Cν, например, если расход системы регулируется циркуляционными насосами.
Сигнальный процессор или модуль обработки может быть выполнен с возможностью определять соответствующую сигнальную информацию, содержащую информацию о расчетной точке или рабочей точке расхода и давления  и
и  в системе, когда кривая системы может проходить через кривую насоса при расчетной скорости, используя уравнения (2.5) следующим образом:
в системе, когда кривая системы может проходить через кривую насоса при расчетной скорости, используя уравнения (2.5) следующим образом:

где a, b и с are являются коэффициентами функции кривой второго порядка насоса наилучшего приближения, nd и nmax являются скоростями работы насоса для расчетной точки и соответствующего максимума, соответственно.
Сигнальный процессор и модуль обработки может быть выполнен с возможностью определять соответствующую информацию, содержащую информацию о функции ПИД-регулятора для скорости n работы двигателя в отношении мгновенного давления в системе и адаптивной уставки давления, используя уравнение (3.1) следующим образом:

где Р*(t) является адаптивной уставкой давления, определяемой с помощью уравнения (2.1), P(t) является мгновенным давлением в системе, a pid представляет функцию ПИД-регулятора.
Сигнальный процессор или модуль обработки могут быть выполнены с возможностью определять соответствующую сигнальную информацию для ведомого ПИД-регулятора расхода для достижения работы насоса с минимальным энергопотреблением, используя уравнение (3.2) следующим образом:

где Q*(t) является уставкой расхода системы, определяемой с помощью уравнения (2.2) с мгновенным давлением в системе, или определяемой непосредственно для сигналов расходов множества зон, используя уравнение (2.3), соответственно, Q(t) является мгновенным расходом системы при скорости n работы двигателя.
Устройство может включать в себя, или принимать форму, систему или устройство адаптивного бездатчикового управления насосами.
Устройство может включать в себя, или принимать форму, орган управления или контроллер насоса, в том числе ПИД-регулятор, имеющий сигнальный процессор или модуль сигнального процессора, например, в том числе для системы водяного отопления.
В качестве примера сигнальный процессор или модуль обработки может включать в себя, или принимать форму, по меньшей мере один сигнальный процессор и по меньшей мере одну память, включая компьютерный программный код, и упомянутые по меньшей мере одна память и компьютерный программный код выполнены с возможностью, с помощью по меньшей мере одного сигнального процессора, побуждать сигнальный процессор по меньшей мере принимать сигнальную информацию (или, например, связанную сигнальную информацию) и определять необходимые скорости работы насоса для зонных циркуляционных насосов. Сигнальный процессор или модуль обработки может быть выполнен с подходящим компьютерным программным кодом для осуществления подходящих алгоритмов обработки сигналов и/или функций, соответствующим изложенному в настоящем документе.
В соответствии с некоторыми вариантами осуществления настоящее изобретение может также принимать форму способа, включающего в себя шаги:
получения в сигнальном процессоре или модуле обработки сигнальной информации, содержащей информацию о расходах, от бездатчиковых преобразователей в зонных циркуляционных насосах в зонах нагрева/охлаждения, управляемых датчиками температуры, в системе водяного отопления с целью извлечения адаптивной уставки давления, соответствующей расходам, запрашиваемым зонами нагрева/охлаждения, используя адаптивную систему и уравнение кривой управления расходом, при этом полученная сигнальная информация содержит информацию об общих расходах, запрашиваемых зонными циркуляционными насосами;
определения в сигнальном процессоре или модуле обработки необходимых скоростей работы насосов для зонных циркуляционных насосов для удовлетворения температурных требований в зонах нагрева на основе полученной сигнальной информации.
Способ может также включать в себя один или более признаков, установленных в настоящем документе, в том числе предоставление от сигнального процессора или модуля обработки соответствующей сигнальной информации, содержащей информацию о необходимых скоростях работы насосов для зонных циркуляционных насосов, например, которые могут использоваться для управления водяной насосной системой.
Настоящее изобретение может также, например, принимать форму компьютерного программного продукта, содержащего машиночитаемый носитель с исполняемым компьютерным кодом, встроенным в него, для осуществления способа, например, при запуске на сигнальном устройстве обработки, которое образует часть такого насосного контроллера. В качестве примера компьютерный программный продукт может, например, иметь форму компакт-диска, дискеты, флэш-карты, карты памяти, а также других типов или видов запоминающих устройств, которые могут сохранять исполняемый компьютером код на таком машиночитаемом носителе, известном либо в настоящее время, либо получившим развитие в будущем.
Следуя подходам и получая преимущества от подходов, раскрытых в вышеупомянутых ссылках [1] и [2], авторы настоящего изобретения предлагают новую и уникальную систему и средство или способ адаптивного управления расходом для насосной системы водяного отопления или охлаждения в настоящем документе. Кривая управления, предложенная в настоящем документе, может быть адаптивной не только по отношению к кривой системы, но также по отношению к скользящему максимальному расходу. Уставка давления с системой и адаптивной кривой управления расходом является существенно намного ближе к давлению в системе, необходимому для создания расхода, который требуется в системе. Установка системы управления работой насоса с минимальным энергопотреблением может быть создана в настоящем документе также на основе системы и средства адаптивного управления расходом с бездатчиковыми применениями, раскрытыми в вышеупомянутых ссылках [3], [4]. [5] и [6], указанных выше. Эта новая и уникальная система и средство или способ адаптивного управления расходом для насосной системы водяного отопления или охлаждения предлагает энергосберегающее средство или способ, который не только является адаптивным к кривой системы, но и к расходу, также связанному с ней, так что энергопотребление насоса может быть оптимальным образом сэкономлено, тем самым решая проблему в промышленности и делая важный вклад в общее состояние уровня техники, особенно при внедрении такой насосной системы водяного отопления или охлаждения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Чертежи содержат следующие фигуры, которые не обязательно изображены в масштабе.
Фиг. 1 представляет схематическое изображение водяной бездатчиковой системы управления насосами, известной в области техники, которая может быть подходящим образом адаптирована и реконфигурирована, например на основе некоторых вариантов осуществления настоящего изобретения.
Фиг. 2 представляет график давления (Ft) в зависимости от расхода (GPM) (галлонов в минуту, гал/мин), показывающий характеристические кривые насоса, системы и мощности, а также точку равновесия давления в стационарном состоянии в соответствии с реализацией некоторых вариантов осуществления настоящего изобретения.
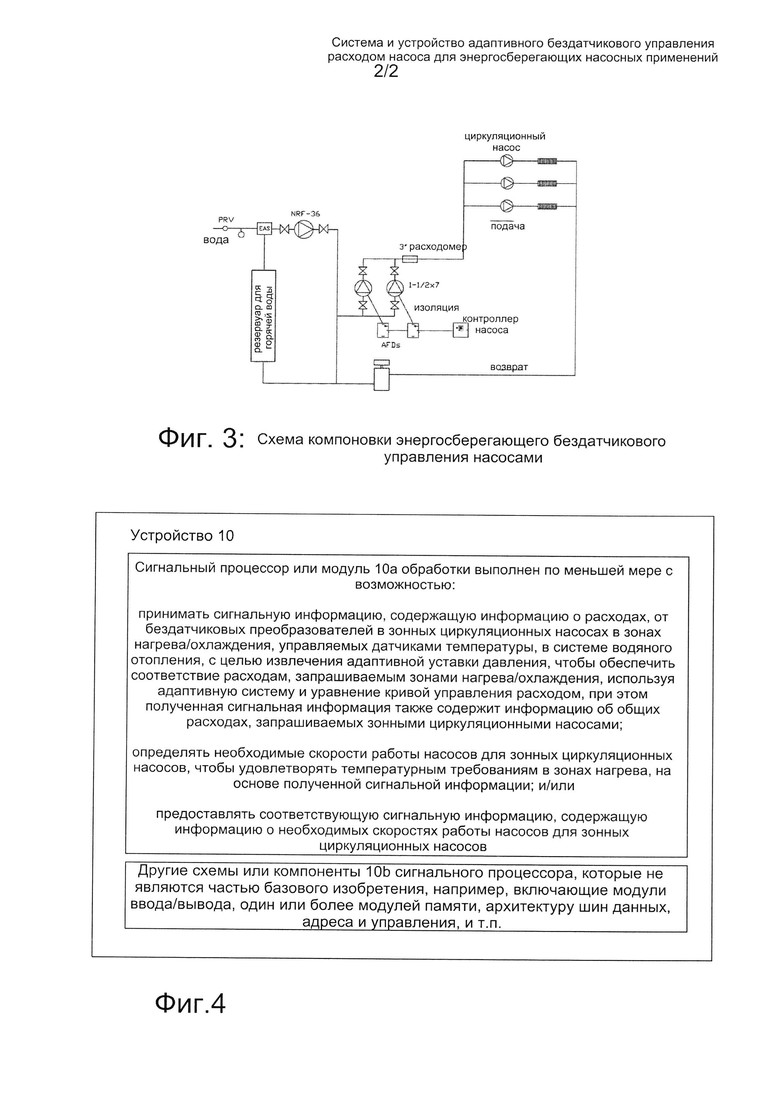
Фиг. 3 представляет схему энергосберегающей бездатчиковой системы управления насосами в соответствии с реализацией некоторых вариантов осуществления настоящего изобретения.
Фиг. 4 представляет блочную схему устройства, например имеющего сигнальный процессор или модуль обработки, выполненного с возможностью реализации функций обработки сигналов, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фиг. 2: Система и функции адаптивного управления расходом насосов
На фиг. 2 показан график, который содержит: кривую насоса, кривую конструктивного управления, кривую адаптивного управления, кривую адаптивной системы и кривую распределения, например для реализации системы и адаптивной схемы управления расходом насосов для водяной насосной системы в соответствии с некоторыми вариантами осуществления настоящего изобретения. В качестве примера, для применения управления насосом, когда доступны мгновенные расход и давление в системе, могут быть выведены система и уравнение кривой адаптивного управления расходом насосов, например на основе кривой адаптивной системы, а также скользящего максимального расхода системы в форме уравнения (2.1) или при его использовании следующим образом:

где Р* представляет адаптивную уставку давления, Q* является расходом системы, запрашиваемым конкретно температурными нагрузками, b0 является минимальным давлением в отсутствии расхода, α является параметром настройки системы управления, изменяющимся в виде 1≤α≤2, определяемым между линейной кривой и квадратичной кривой, и  и
и  являются адаптивными скользящими максимальными расходом и давлением, как показано на фиг. 2, соответственно. В качестве примера, уравнение (2.1) может быть подходящим образом названо системой и функцией адаптивного управления расходом.
являются адаптивными скользящими максимальными расходом и давлением, как показано на фиг. 2, соответственно. В качестве примера, уравнение (2.1) может быть подходящим образом названо системой и функцией адаптивного управления расходом.
В качестве еще одного примера, в случае, когда сигнал расхода может быть использован в ПИД-регуляторе расхода, уставка расхода в функции управления может затем быть переписана в форме уравнения (2.2) или путем его использования следующим образом:

Здесь датчик давления может быть использован для получения сигнала мгновенного давления Р*.
В уравнениях (2.1) или (2.2) запрашиваемые расход Q* или давление Р* системы могут быть предоставлены расходомером или датчиком давления, или бездатчиковым преобразователем, соответственно.
В качестве примера, для применения с множеством зон запрашиваемый расход Q* системы может быть выражен в виде суммы зонных расходов, соответственно, или путем использования уравнения (2.2) следующим образом:
где  является расходом в зоне i и n является общим количеством зон, что опять может быть предоставлено расходомером или датчиком давления, или бездатчиковым преобразователем в зоне i, соответственно.
является расходом в зоне i и n является общим количеством зон, что опять может быть предоставлено расходомером или датчиком давления, или бездатчиковым преобразователем в зоне i, соответственно.
В общем и в качестве примера, адаптивный скользящий максимальный расход  может быть получен с помощью детектора скользящего среднего или скользящих пиков для расхода Q системы в виде
может быть получен с помощью детектора скользящего среднего или скользящих пиков для расхода Q системы в виде

где МА представляет детектор скользящего среднего, a MP представляет детектор скользящих пиков, соответственно.  может быть получен с помощью уравнения расхода
может быть получен с помощью уравнения расхода  . Характеристический коэффициент
. Характеристический коэффициент  адаптивной системы может быть получен подобным образом из характеристического коэффициента Cν эквивалентной системы путем использования детектора скользящего среднего или детектора максимума, определенных в уравнении 2.4 соответственно.
адаптивной системы может быть получен подобным образом из характеристического коэффициента Cν эквивалентной системы путем использования детектора скользящего среднего или детектора максимума, определенных в уравнении 2.4 соответственно.  и
и  могут изменяться в пределах
могут изменяться в пределах  и
и  , что показано на фиг. 2. Следует отметить, что характеристический коэффициент
, что показано на фиг. 2. Следует отметить, что характеристический коэффициент  может быть постоянной величиной Cν, например, если расход системы регулируется циркуляционными насосами.
может быть постоянной величиной Cν, например, если расход системы регулируется циркуляционными насосами.
В качестве примера, расчетная точка или рабочая точка расхода и давления  и
и  системы, когда кривая системы может проходить через кривую насоса при расчетной скорости, может быть получена при следовании вышеупомянутой ссылке №[6] в виде уравнения (2.5) или путем его использования следующим образом:
системы, когда кривая системы может проходить через кривую насоса при расчетной скорости, может быть получена при следовании вышеупомянутой ссылке №[6] в виде уравнения (2.5) или путем его использования следующим образом:

где a, b и с являются коэффициентами функции кривой насоса второго порядка наилучшего приближения, nd и nmax являются скоростями работы насоса в расчетной точке или его максимуме, соответственно. Следует отметить, что, когда b0 устанавливается равным нулю и коэффициент α кривой управления устанавливается равным квадратичной кривой 2, кривая управления тогда частично совпадает с кривой системы.
По сравнению с другими алгоритмами, средствами или способом управления давлением по уставке, которые имеют фиксированную кривую управления, определяемую с помощью (b0,0) и (Pd,Qd), уравнения управления в уравнениях 2.1 или 2.2 являются адаптивными не только к изменению системных характеристик, но также и к скользящему максимальному расходу, с которым они связаны. Заданные значения давления в системе и кривой адаптивного управления расходом для ПИД-регулятора скорости двигателя могут быть, следовательно, намного ближе к характеристической кривой системы. При этом стоимость и энергопотребление насоса для системы водяного отопления или охлаждения могут быть существенно сэкономлены.
Фиг. 3: Энергосберегающие бездатчиковые схемы управления насосами
Следуя концепциям и способам адаптивной системы и управления расходом, могут быть предложены энергосберегающие бездатчиковые схемы управления насосами для бездатчиковой схемы управления насосами, как показано схематически на фиг. 3. Как показано, и в качестве примера, бездатчиковая схема управления насосами может включать в себя первую насосную схему, имеющую резервуар для горячей воды (HW резервуар или бойлер), устройство EAS и насос (например, насос NRF-36) и сопутствующие клапаны (например, стопорные клапаны), в комбинации со второй насосной схемой, имеющей насосы, другие сопутствующие клапаны (например, другие стопорные клапаны), расходомер, циркуляционные насосы и контроллер насосов, подключенный к насосам с помощью AFDs.
Например, трехходовые клапаны, связанные с обводными трубопроводами в известной системе постоянного водяного отопления на фиг. 1, могут быть полностью удалены из зон. Общий расход, создаваемый в зонах посредством циркуляционных насосов, может затем быть скоррелирован непосредственно с расходом, создаваемым насосами вторичного контура. По существу не будет ненужных потерь энергии в зонах, т.е. энергетических потерь, вызванных динамическим трением при движении потока через обводные трубопроводы и трехходовые клапаны. Кроме того, отсутствуют потери тепловой энергии горячей воды в обводных линиях. Более того, адаптивная система и средство или способ управления расходом, раскрытые в настоящем документе, могут быть оптимально внедрены с такой схемой работы с минимальным энергопотреблением насосов, которая представлена в настоящем документе.
В соответствии с настоящим изобретением работа системы управления может быть реализована следующим образом. Вначале необходимые расходы, удовлетворяющие температурным требованиям в зонах, могут быть созданы циркуляционными насосами, управляемыми датчиками температуры, соответственно. Сигналы расходов от бездатчиковых преобразователей циркуляционных насосов могут затем быть переданы на центральный пульт управления насосами с помощью проводного, беспроводного способов или протокола передачи данных соответственно. Адаптивная уставка давления, отвечающее расходам, которые требуются зонам, может затем быть установлена с помощью адаптивной системы и уравнения кривой управления расходом, определенной в уравнении 2.1. Скорость работы насоса, необходимая для общего расхода во вторичном контуре, может затем быть получена с помощью ПИД-регулятора соответственно в отношении мгновенного давления системы и полученной адаптивной уставки давления.
Функция ПИД-регулятора для скорости n вращения двигателя в отношении мгновенного давления в системе и адаптивной уставки давления, упомянутых выше, может быть представлена в виде

где Р* является адаптивной уставкой давления, определенной с помощью уравнения 2.1, Р является мгновенным давлением в системе, и pid представляет ПИД-регулятор. Как обсуждалось выше, адаптивная система и кривая управления расходом, определенная с помощью уравнения 2.1, фактически совпадает в точности с кривой системы, если b0 устанавливается равным нулю и коэффициент α кривой управления устанавливается равным квадратичной кривой 2. Тогда установка адаптивной уставки давления является такой же для давления в системе, необходимого для удовлетворения требований по расходу в зонах. Соответственно может быть достигнута работа с минимальным энергопотреблением насосов.
В частности, может быть также введен ведомый ПИД-регулятор расхода для достижения работы насосов с минимальным энергопотреблением, такой же, как и ПИД-регулятор адаптивной уставки давления, представленный выше. Ведомый ПИД-регулятор расхода, раскрытый в настоящем документе, может быть выражен в виде, например, уравнения (3.2) следующим образом:

где Q* является уставкой расхода системы, определенной с помощью уравнения 2.2 с сигналом мгновенного давления в системе, или выведенной непосредственно для сигналов расхода множества зон с помощью уравнения 2.3, соответственно, Q является мгновенным расходом в системе при скорости n вращения двигателя. Уравнение 3.2 определяет управление скоростью работы насоса с помощью ведомого ПИД-регулятора расхода, в котором расход системы следует за общим расходом, который необходим, чтобы удовлетворять требованиям по нагреву или охлаждению в зонах, соответственно. Уравнения от 2.1 до 2.5, установленные в предыдущем описании выше, могут затем быть использованы для получения мгновенного давления и расхода при стационарном положении насосной системы, а также расчетных значений давления.
Для расхода, регулируемого с помощью циркуляционных насосов, как показано на фиг. 3, могут использоваться либо уравнение 3.1, либо уравнение 3.2 для достижения необходимой скорости вращения насоса на основе адаптивной уставки, чтобы удовлетворять температурным требованиям в зонах до тех пор, пока обеспечивается общий расход, запрашиваемый циркуляционными насосами. Соответственно, затем может быть реализована работа с минимальным энергопотреблением насосов. Следует отметить, что система и средство адаптивного управления расходом насосов могут быть вновь выполнены с помощью расходомера, или датчика давления, или также бездатчикового преобразователя, соответственно.
Фиг. 4:
В качестве примера, фиг. 4 показывает устройство 10 в соответствии с некоторыми вариантами осуществления настоящего изобретения, например такие, которые характеризуются наличием сигнального процессора или модуля обработки 10а, выполненного с возможностью:
принимать сигнальную информацию, содержащую информацию о расходах, от бездатчиковых преобразователей в зонных циркулирующих насосах в зонах отопления/охлаждения, управляемых датчиками температуры, в системе водяного отопления, с целью извлечения адаптивной уставки давления, чтобы соответствовать расходам, запрашиваемым зонами отопления/охлаждения, с использованием адаптивной системы и уравнения кривой управления расходом, при этом полученная сигнальная информация также содержит информацию об общих расходах, запрашиваемых зонными циркуляционными насосами; и
определять необходимые скорости работы насосов для зонных циркуляционных насосов, чтобы удовлетворять температурным требованиям в зонах нагрева, на основе полученной сигнальной информации.
В процессе работы сигнальный процессор или модуль обработки может быть выполнен с возможностью предоставления соответствующей сигнальной информации, содержащей информацию о необходимых скоростях работы насоса. Соответствующая сигнальная информация может содержать информацию, используемую для управления водяной насосной системой.
Сигнальный процессор или модуль обработки может быть выполнен в виде, или образовывать часть, центральной панели управления насосом, которая, например, может включать в себя или быть реализована в сочетании с элементом управления или контроллером, показанным на фиг. 3.
Зонные циркуляционные насосы на фиг. 3 могут иметь датчики для предоставления расходов.
Как должно быть понятно специалисту в данной области техники, настоящее изобретение может быть реализовано с использованием характеристических уравнений насосов и системы и эмпирических уравнений мощности, например, в соответствии с теми, которые изложены в настоящем документе, а также с использованием других типов или видов характеристических уравнений насосов и системы и эмпирических уравнений мощности, которые известны в настоящее время или будут разработаны в будущем.
В качестве примера, функциональные возможности устройства 10 могут быть реализованы с использованием аппаратных средств, программного обеспечения, встроенного программного обеспечения или их комбинации. В типичной реализации на базе программного обеспечения устройство 10 будет включать в себя одну или более архитектур на основе микропроцессоров, имеющих, например, по меньшей мере один сигнальный процессор или микропроцессор, подобно элементу 10а. Специалист в данной области техники сможет программировать такую реализацию на основе микроконтроллера или на основе микропроцессора для выполнения функций, описанных в настоящем документе, без ненужного экспериментирования. Например, сигнальный процессор или модуль 10а обработки может быть выполнен, например, специалистом в данной области техники, без ненужного экспериментирования, чтобы принимать сигнальную информацию, содержащую информацию о расходах, от бездатчиковых преобразователей в зонных циркуляционных насосах, в зонах нагрева/охлаждения, которые контролируются датчиками температуры в системе водяного отопления, с целью извлечения адаптивной уставки давления, чтобы соответствовать расходам, запрашиваемых зонами нагрева/охлаждения, с использованием системы и уравнения кривой управления расходом, при этом полученная сигнальная информация содержит информацию об общих расходах, запрашиваемых зонными циркуляционными насосами, в соответствии с тем, что описано в настоящем документе.
Более того, сигнальный процессор или модуль 10а обработки может быть выполнен, например, специалистом в данной области техники без ненужного экспериментирования, чтобы определять необходимые скорости работы насосов для зонных циркуляционных насосов для удовлетворения температурных требований в зонах нагрева, на основе полученной сигнальной информации, в соответствии с тем, что раскрыто в настоящем документе.
Объем изобретения не ограничен какой-либо конкретной реализацией с использованием технологии, либо известной в настоящее время, либо разработанной позднее в будущем. Объем изобретения включает в себя реализацию функциональных возможностей процессоров 10а в виде автономного процессора, сигнального процессора или процессорного сигнального модуля, а также отдельного процессора или процессорных модулей, или некоторых их комбинаций.
Устройство 10 может также включать в себя, например, другие сигнальные процессорные схемы или компоненты 10b, в том числе оперативное запоминающее устройство или модуль памяти (RAM) и/или постоянное запоминающее устройство (ROM), устройства ввода/вывода и шины управления, данных и адресные, соединяющие вышеупомянутое, и/или по меньшей мере один входной процессор и по меньшей мере один выходной процессор, например, что будет понятно специалисту в области техники.
Различные аспекты новизны
Настоящее изобретение может также включать один или более из следующих различных вариантов осуществления:
Например, в соответствии с некоторыми вариантами осуществления настоящее изобретение может принимать форму, или может быть реализовано в виде, системы, и средство или способ адаптивного управления расходом для насосов водяной насосной системы может включать в себя уравнение кривых адаптивного управления насосами на основе скользящего максимального расхода системы, запрашиваемого из зон, а также характеристической кривой скользящей средней эквивалентной водяной системы. В процессе работы уставка давления из системы и уравнений кривой адаптивного управления расходом для ПИД-регуляторов скорости работы насосов намного ближе к давлению в системе, необходимому для обеспечения расхода, запрошенного в системе, так что энергопотребление при работе насосов может быть сэкономлена.
В соответствии с некоторыми вариантами осуществления настоящее изобретение может быть осуществлено с использованием одного предпочтительного варианта системы, и средство или способ адаптивного управления расходом насосов для водяной насосной системы может включать в себя систему и средства уравнений адаптивного управления расходом насосов, установленных в виде уравнения 2.1 или уравнения 2.2, с помощью которых могут быть извлечены адаптивное давление или уставка расхода на основе скользящего максимального расхода системы, запрошенного зонами, как определено уравнениями 2.3-2.4, а также характеристической кривой скользящего среднего системы, и как показано схематически на фиг. 2.
В соответствии с некоторыми вариантами осуществления настоящее изобретение может быть реализовано с использованием одного предпочтительного варианта системы, и средство адаптивного управления расходом насосов для водяной насосной системы может включать в себя конфигурацию системы работы насосов с минимальным энергопотреблением, объединенную с датчиками или бездатчиковыми преобразователями, как показано схематически на фиг. 3. Система работы насосов с минимальным энергопотреблением может быть получена с минимальным давлением b0, установленным на ноль, и параметром α кривой управления, установленной так, чтобы быть квадратичной в уравнении 2.1. Скорость работы насоса может затем быть определена посредством функции ПИД-регулятора в уравнении 3.1.
В соответствии с некоторыми вариантами осуществления настоящее изобретение может быть реализовано с использованием одного предпочтительного варианта конфигурации системы работы насосов с минимальным энергопотреблением, объединенной с датчиками или бездатчиковыми средствами преобразователей, как показано схематически на фиг. 2, например, которая также может содержать ведомый ПИД-регулятор расхода по уравнению 3.2, где Q* является уставкой расхода системы, определяемой с помощью уравнения 2.2 с сигналом мгновенного давления в системе, отслеживаемым или выводимым непосредственно для сигналов расхода множества зон с помощью уравнений 2.3 и. 2.4, соответственно, Q является мгновенным расходом в системе при скорости n вращения двигателя. Уравнение 3.2 может определять ведомый ПИД-регулятор скорости работы насоса для расхода, в которой расход системы следует за общим расходом, необходимым, чтобы удовлетворять требования по нагреву или охлаждению в зонах, соответственно.
В соответствии с некоторыми вариантами осуществления настоящее изобретение может быть реализовано с использованием одного предпочтительного варианта средства или способа бездатчиковых преобразователей для водяной насосной системы, например, такого, который содержит бездатчиковый преобразователь, на основе показаний работы насосных двигателей, которые выдают данные по расходу и давлению в системе, которые могут использоваться для системы и средств кривой адаптивного управления расходом насосов. Средства или способ бездатчикового преобразователя могут представлять собой средства дискретного моделирования с калибровкой или средства теоретического моделирования, как установлено в вышеупомянутых ссылках от [3] до [6].
В соответствии с некоторыми вариантами осуществления настоящее изобретение может быть реализовано с использованием систем работы с минимальным энергопотреблением насосов, которые могут представлять собой водяные системы замкнутого контура или водяные системы открытого контура, как в работе первичных насосов, вторичных насосов, циркуляции воды или напорном усилителе. Системы, упомянутые здесь, могут состоять из одной зоны или множества зон.
В соответствии с некоторыми вариантами осуществления настоящее изобретение может быть реализовано с использованием управления и генерирования сигналов, а технологии контроля передачи и формирования соединений могут включать в себя все традиционные средства измерения и передачи, которые используются в настоящее время. Предпочтительно технологии беспроводной передачи сигналов или протокол связи могут быть использованы в качестве оптимальных и выгодных решений.
В соответствии с некоторыми вариантами осуществления настоящее изобретение может быть реализовано с использованием насосов, упомянутых в настоящем документе, для водяных насосных систем, которые могут состоять из одиночного насоса, циркуляционного насоса, группы параллельно соединенных насосов или циркуляционных насосов, группы последовательно соединенных насосов или циркуляционных насосов, или их комбинаций.
В соответствии с некоторыми вариантами осуществления настоящее изобретение может быть реализовано с использованием систем регулирования расхода, например, таких, которые могут содержать клапаны ручного или автоматического управления, циркуляционные насосы ручного или автоматического управления или их комбинации.
Вышеупомянутые варианты осуществления приводятся в качестве примера, и объем изобретения предназначен для включения в него других видов или типов вариантов осуществления в соответствии с раскрытым в настоящем документе в пределах сущности настоящего изобретения.
Уравнения
Вышеупомянутые уравнения для осуществления настоящего изобретения приведены в качестве примера. Объем настоящего изобретения предназначен для включения в него использования других видов или типов уравнений, которые известны в настоящее время или будут разработаны в будущем, также как и варианты вышеупомянутых уравнений, все в пределах сущности настоящего изобретения.
Объем изобретения
Следует понимать, что, если в настоящем документе не указано иное, любой из признаков, характеристик, альтернатив или модификаций, описанных в отношении конкретного варианта осуществления в настоящем документе, может также быть применен, использован или объединен с любым другим вариантом осуществления, описанным в настоящем документе. Кроме того, чертежи в настоящем документе изображены не в масштабе.
Хотя настоящее изобретения описывается в качестве примера в отношении центробежного насоса, объем изобретения включает использование изобретения в отношении других типов или видов насосов, либо известных в настоящее время, либо разработанных позднее в будущем.
Хотя изобретение было описано и проиллюстрировано в отношении примеров его осуществления, вышеупомянутое и другие прочие дополнения и пропуски могут быть произведены в настоящем документе в пределах объема и сущности настоящего изобретения.
Группа изобретений относится к управлению и/или контролю насоса систем водяного отопления. Сигнальный процессор принимает сигнальную информацию о расходах от бездатчиковых преобразователей в зонных циркуляционных насосах в зонах нагрева/охлаждения, управляемых датчиками температуры, с целью извлечения адаптивной уставки давления, чтобы обеспечить соответствие расходам, запрашиваемым зонами нагрева/охлаждения. При этом используется адаптивная система и уравнение кривой управления расходом. Сигнальная информация содержит также информацию об общих расходах, запрашиваемых зонными циркуляционными насосами. Процессор определяет необходимые скорости работы указанных насосов, чтобы удовлетворять температурным требованиям в зонах нагрева, на основе полученной сигнальной информации. Изобретения направлены на обеспечение давления в системе, необходимого для запрошенного в системе расхода, при более экономичном энергопотреблении. 2 н. и 20 з.п. ф-лы, 4 ил.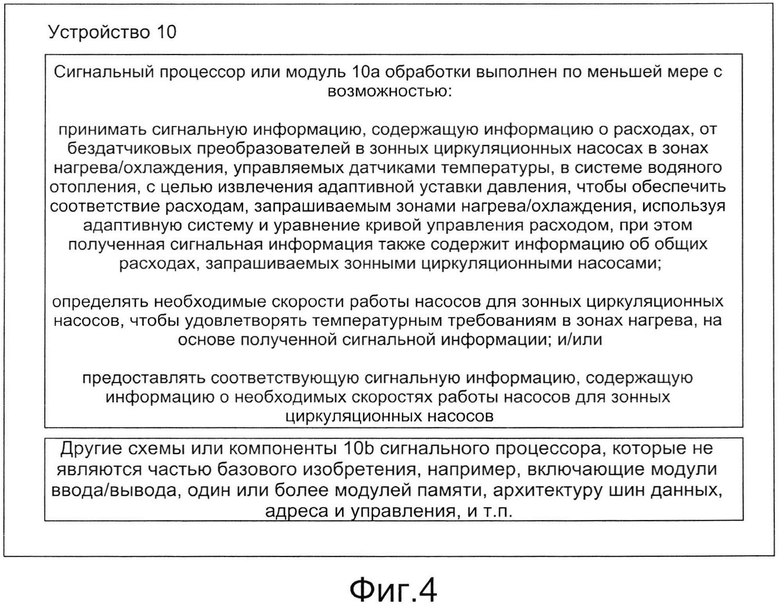
1. Устройство, содержащее:
сигнальный процессор или модуль обработки, выполненный с возможностью по меньшей мере:
принимать сигнальную информацию о расходах от бездатчиковых преобразователей в зонных циркуляционных насосах в зонах нагрева/охлаждения, управляемых датчиками температуры, в системе водяного отопления, для извлечения адаптивной уставки давления, чтобы обеспечить соответствие расходам, запрашиваемым зонами нагрева/охлаждения, используя адаптивную систему и уравнение кривой управления расходом, при этом полученная сигнальная информация также содержит информацию об общих расходах, запрашиваемых зонными циркуляционными насосами; и
определять необходимые скорости работы насосов для зонных циркуляционных насосов, чтобы удовлетворять температурным требованиям в зонах нагрева, на основе полученной сигнальной информации.
2. Устройство по п. 1, в котором сигнальный процессор или модуль обработки выполнен с возможностью предоставлять соответствующую сигнальную информацию, содержащую информацию о необходимых скоростях работы насосов.
3. Устройство по п. 2, в котором соответствующая сигнальная информация содержит информацию, используемую для управления водяной насосной системой.
4. Устройство по п. 1, в котором сигнальный процессор или модуль обработки выполнен в виде, или образует часть, центрального пульта управления насосом.
5. Устройство по п. 1, в котором зонные циркуляционные насосы содержат датчики для предоставления расходов.
6. Устройство по п. 1, в котором сигнальный процессор или модуль обработки выполнен с возможностью определять уравнение кривой адаптивного управления насосом на основе кривой адаптивной системы и в виде скользящего максимального расхода системы, который зависит от соотношения между адаптивной уставкой давления, расходом в системе, запрашиваемым температурными нагрузками, минимальным давлением в отсутствие расхода, параметром установки кривой управления и адаптивным скользящим максимальным расходом и давлением.
7. Устройство по п. 6, в котором сигнальный процессор или модуль обработки выполнен с возможностью:
1) определять уравнение кривой адаптивного управления насосом на основе адаптивной кривой системы и в виде скользящего максимального расхода системы, используя уравнение (2.1) следующим образом:

где P*(t) представляет адаптивную уставку давления, Q*(t) является расходом системы, запрашиваемым температурными нагрузками, b0 является минимальным давлением в отсутствие расхода, α является установочным параметром кривой управления, изменяющимся в виде 1≤α≤2, определенным между линейной кривой и квадратичной кривой, a  и
и  являются адаптивными скользящими максимальными расходом и давлением; или
являются адаптивными скользящими максимальными расходом и давлением; или
2) определять сигнал расхода для использования в способе ПИД-регулирования расхода на основе уставки расхода в функции управления с использованием уравнения (2.2) следующим образом:

в том числе тогда, когда сигнальный процессор или модуль обработки выполнен с возможностью принимать сигнал мгновенного давления Р*(t) от датчика давления.
8. Устройство по п. 7, в котором сигнальный процессор или модуль обработки выполнен с возможностью принимать соответствующую сигнальную информацию, содержащую информацию о расходе Q*(t) или давлении P*(t) системы от расходомера или датчика давления, или бездатчикового преобразователя, соответственно.
9. Устройство по п. 7, в котором, для применения с множеством зон, сигнальный процессор или модуль обработки выполнен с возможностью определять расход Q*(t) системы как суммы расходов в зонах, соответственно, используя уравнение (2.3) следующим образом:
где  является расходом в зоне i, а n является общим количеством зон, в том числе тогда, когда сигнальный процессор или модуль обработки выполнен с возможностью принимать соответствующую сигнальную информацию, содержащую информацию о расходе или давлении P*(t) системы от расходомера или датчика давления, или бездатчикового преобразователя в зоне i, соответственно.
является расходом в зоне i, а n является общим количеством зон, в том числе тогда, когда сигнальный процессор или модуль обработки выполнен с возможностью принимать соответствующую сигнальную информацию, содержащую информацию о расходе или давлении P*(t) системы от расходомера или датчика давления, или бездатчикового преобразователя в зоне i, соответственно.
10. Устройство по п. 7, в котором сигнальный процессор или модуль обработки выполнен с возможностью определять соответствующую сигнальную информацию, относящуюся к адаптивному скользящему максимальному расходу  , посредством детектора скользящего среднего или скользящих пиков, по расходу Q системы, используя уравнение (2.4) следующим образом:
, посредством детектора скользящего среднего или скользящих пиков, по расходу Q системы, используя уравнение (2.4) следующим образом:

где функция MA(Q(t)) представляет детектор скользящего среднего, а функция MP(Q(t)) представляет детектор скользящих пиков, соответственно.
11. Устройство по п. 10, в котором сигнальный процессор или модуль обработки выполнен с возможностью определять соответствующую сигнальную информацию, содержащую информацию о  путем использования уравнения расхода следующим образом:
путем использования уравнения расхода следующим образом:
в том числе тогда, когда сигнальный процессор или модуль обработки выполнен с возможностью определять соответствующую сигнальную информацию, содержащую информацию о характеристическом коэффициенте  адаптивной системы, используя характеристический коэффициент Cν эквивалентной системы, путем использования детектора скользящего среднего или максимума, определенный в уравнении (2.4), соответственно.
адаптивной системы, используя характеристический коэффициент Cν эквивалентной системы, путем использования детектора скользящего среднего или максимума, определенный в уравнении (2.4), соответственно.
12. Устройство по п. 7, в котором параметры  и
и  изменяются в границах диапазонов
изменяются в границах диапазонов  и
и  , в том числе тогда, когда характеристический коэффициент адаптивной системы является постоянной величиной Cν, если расход системы регулируется с помощью циркуляционных насосов.
, в том числе тогда, когда характеристический коэффициент адаптивной системы является постоянной величиной Cν, если расход системы регулируется с помощью циркуляционных насосов.
13. Устройство по п. 7, в котором сигнальный процессор или модуль обработки выполнен с возможностью определять соответствующую сигнальную информацию, содержащую информацию о расчетной точке или рабочей точке расхода и давления  и
и  системы, где кривая системы может проходить через кривую насоса при расчетной скорости, используя уравнение (2.5) следующим образом:
системы, где кривая системы может проходить через кривую насоса при расчетной скорости, используя уравнение (2.5) следующим образом:

где a, b и с являются коэффициентами функции кривой второго порядка насоса наилучшего приближения, nd и nmax являются скоростями работы насоса в расчетной точке и соответствующем максимуме, соответственно.
14. Устройство по п. 7, в котором сигнальный процессор или модуль обработки выполнен с возможностью определять соответствующую сигнальную информацию, содержащую информацию о функции ПИД-регулятора для скорости n работы двигателя относительно мгновенного давления в системе и адаптивной уставки давления, используя уравнение (3.1) следующим образом:

где P*(t) является адаптивной уставкой давления, определяемой с помощью уравнения (2.1), P(t) является мгновенным давлением в системе, a pid представляет функцию ПИД-регулятора.
15. Устройство по п. 13, в котором сигнальный процессор или модуль обработки выполнен с возможностью определять соответствующую сигнальную информацию для ведомого ПИД-регулятора расхода для достижения работы насосов с минимальным энергопотреблением, используя уравнение (3.2) следующим образом:

где Q*(t) является уставкой расхода системы, определяемой с помощью уравнения (2.2) с сигналом мгновенного давления в системе, или определяемой непосредственно для сигналов расходов для множества зон с использованием уравнения (2.3), соответственно, Q(t) является мгновенным расходом системы при скорости n работы двигателя.
16. Устройство по п. 1, которое содержит систему и устройство адаптивного бездатчикового управления насосами.
17. Способ, включающий:
прием, с помощью сигнального процессора или модуля обработки, сигнальной информации, содержащей информацию о расходах, от бездатчиковых преобразователей в зонных циркуляционных насосах в зонах нагрева/охлаждения, управляемых датчиками температуры, в системе водяного отопления, для извлечения адаптивной уставки давления, чтобы обеспечить соответствие расходам, запрашиваемым зонами нагрева/охлаждения, используя адаптивную систему и уравнение кривой управления расходом, при этом полученная сигнальная информация также содержит информацию об общих расходах, запрашиваемых зонными циркуляционными насосами; и
определение с помощью сигнального процессора или модуля обработки необходимых скоростей работы насосов для зонных циркуляционных насосов, чтобы удовлетворять температурным требованиям в зонах нагрева, на основе полученной сигнальной информации.
18. Способ по п. 17, который включает предоставление от сигнального процессора или модуля обработки соответствующей сигнальной информации, содержащей информацию о необходимых скоростях работы насосов.
19. Способ по п. 18, в котором соответствующая сигнальная информация содержит информацию, используемую для управления насосной водяной системой.
20. Способ по п. 17, который включает выполнение сигнального процессора или модуля обработки в виде центрального пульта управления насосами, или формирование сигнального процессора или модуля обработки в виде части центрального пульта управления насосами.
21. Способ по п. 17, который включает выполнение зонных циркуляционных насосов с датчиками для предоставления расходов.
22. Способ по п. 17, который включает определение, с помощью сигнального процессора или модуля обработки, уравнения кривой адаптивного управления насосом на основе кривой адаптивной системы и в виде скользящего максимального расхода системы, который зависит от соотношения между адаптивной уставкой давления, расходом в системе, запрашиваемым температурными нагрузками, минимальным давлением в отсутствие расхода, установочным параметром кривой управления и адаптивными скользящими максимальными расходом и давлением.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 20120251340 A1, 04.10.2012 | |||
| US 7284710 B2, 23.10.2007 | |||
| US 20140048244 A1, 20.02.2014 | |||
| EA 201170298 A1, 30.06.2011 | |||
| СПОСОБ УПРАВЛЕНИЯ КОМПЛЕКСОМ ОТОПЛЕНИЯ И ГОРЯЧЕГО ВОДОСНАБЖЕНИЯ И АВТОМАТИЗИРОВАННАЯ КОТЕЛЬНАЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2090805C1 |

