ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Приоритет этой заявки РСТ заявляется по дате подачи заявки на патент №14/091,795, поданной 27 ноября 2013 года, приоритет которой заявляется по предварительной заявке на патент №61/771,375, поданной 1 марта 2013 года, которые полностью включены в настоящий документ посредством ссылки.
Эта заявка также связана со следующими заявками:
заявкой на патент США №12/982,289 (патентный реестр №911-019.001.1//F-B&G-1001), поданной 30 декабря 2010 года, озаглавленной «Способ и устройство для управления насосами с использованием переменной эквивалентной характеристической кривой системы, АКА кривой адаптивного управления»;
заявкой на патент США №13/717,086 (патентный реестр №911-019.004.2//F-B&G-X0001), поданной 17 декабря 2012 года, озаглавленной «Способы динамического линейного управления и устройство для управления насосом с переменной скоростью», приоритет которой заявляется по дате подачи предварительной заявки на патент США №61/576,737, поданной 16 декабря 2011 года, теперь аннулированной;
предварительной заявкой на патент США №61/803,258 (патентный реестр №911-019.0010.1//F-B&G-X0007), поданной 19 марта 2013 года, озаглавленной «Смешанный теоретический и дискретный бессенсорный преобразователь для контроля дифференциального давления и расхода насоса»;
предварительной заявкой на патент США №61/858,237 (патентный реестр №911-019.012.1//F-B&G-X0010US), поданной 25 июля 2013 года, озаглавленной «Бессенсорное адаптивное управление насосом с автокалибровочным устройством для гидравлической насосной системы»;
которые переуступлены правопреемнику настоящей патентной заявки и все полностью включены в настоящий документ посредством ссылки.
Настоящее изобретение основывается на семействе технологий,
раскрытых в упомянутых выше связанных заявках.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область изобретения
Настоящее изобретение относится к способу управления работой насоса; и более конкретно, настоящее изобретение относится к способу и устройству для управления насосом, например, для бытового и промышленного отопления или системы водяного охлаждения.
2. Краткое описание предшествующего уровня техники
В качестве примера, на Фиг. 1(a) показана вспомогательная гидравлическая система управления нагревом или охлаждением с насосом с переменной скоростью, которая известна в данной области техники, а на Фиг. 1(b) показана насосная система повышения давления воды, которая также известна в данной области техники. В последнее время были в существенной степени решены вопросы, касающиеся энергосбережения и охраны окружающей среды в таких насосных системах. Также все больше внимания уделялось приложениям управления гидравлическими насосами, в том числе управления насосами для бытовых и промышленных водяных насосных систем или систем циркуляции с нагревом и охлаждением, насосных систем повышения давления воды и тому подобное, как показано на Фиг. 1(a) и (b), с характеристиками, которые могут быть динамическими и природа которых может быть неизвестна. Для снижения потребления энергии и эксплуатационных затрат были предложены некоторые известные методики адаптивного управления.
Кроме того, в вышеупомянутой заявке на патент США №12/982,286, поданной 30 декабря 2010 года (патентный реестр №911-019.001.1//F-B&G-1001), раскрыта схема адаптивного управления для гидравлических насосных систем для нагрева и охлаждения, а также для насосных систем повышения давления воды, в соответствии с тем, что схематически показано на Фиг. 1(a) и (b). На Фиг. 1(b) гидравлическая насосная система содержит контроллер и насос, расположенный в сообщении с технологической трубой с обратными клапанами. В процессе работы насос реагирует на сигналы управления от контроллера и перекачивает поток через технологическую трубу. На Фиг. 1(c) показан график, показывающий различные функции, построенные с использованием известных уравнений кривых системы, например, включая кривую насоса, мгновенную кривую системы, кривую постоянного управления, эквивалентную кривую системы (как она рассчитана), кривую адаптивного управления и кривую распределения потерь. Установочную точку давления, Р*, в зависимости от требуемого расхода, Q*, можно вычислить и/или определить из уравнения  , где кривая адаптивного управления,
, где кривая адаптивного управления,  может быть получена из уравнения потока с помощью фильтра скользящего среднего. При использовании этого адаптивного подхода, кривая адаптивного управления для получения установочной точки давления расположена гораздо ближе к эквивалентной кривой системы, которая представляет собой минимальное давление, необходимое для поддержания требуемого расхода, в соответствии с тем, что показано на Фиг. 1(c). Из-за этого, при использовании этого адаптивного подхода, номинальная энергия насосной системы может быть сэкономлена.
может быть получена из уравнения потока с помощью фильтра скользящего среднего. При использовании этого адаптивного подхода, кривая адаптивного управления для получения установочной точки давления расположена гораздо ближе к эквивалентной кривой системы, которая представляет собой минимальное давление, необходимое для поддержания требуемого расхода, в соответствии с тем, что показано на Фиг. 1(c). Из-за этого, при использовании этого адаптивного подхода, номинальная энергия насосной системы может быть сэкономлена.
Кроме того, в данной области техники известны методики с использованием преобразования бессенсорного насоса, получения давления и расхода в системе, основываясь на выходных сигналах двигателя. Тем не менее, известные бессенсорные модели, представленные до сих пор, сформулированы либо в одномерном (1D) пространстве, либо в двумерном (2D) дискретном пространстве, что усложняет получение давления и расхода в системе из скорости вращения и мощности двигателя, с точки зрения разработки алгоритма и точности сигналов преобразования.
Для бессенсорного преобразования могут быть использованы некоторые известные подходы, в том числе дискретные модели, откалиброванные гидравлическими данными насоса и системы, вместе с численными решениями. Такие методики дискретного бессенсорного моделирования просты и эффективны. Точность преобразования может поддерживаться в пределах менее чем 5-10% погрешности. С другой стороны, также существуют некоторые теоретические методики, основанные на характеристических уравнениях насоса и системы, используемые для некоторых простых и легких приложений управления насосами, где не требуется знание точного расхода и давления для управления насосом и не предусмотрено никаких калибровочных датчиков. В качестве компромисса, точность преобразования расхода и давления может иметь самое меньшее больше чем 10-15% погрешности. Однако точность преобразования может ухудшаться очень быстро на низких скоростях.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, настоящее изобретение обеспечивает трехмерное (3D) бессенсорное средство и преобразователь, разработанные для получения расхода и давления в системе для динамической гидравлической насосной системы относительно сигналов двигателя, основанных на калибровочных данных насоса и двигателя. Давление и расход в системе могут быть разрешены непосредственно в трехмерной формулировке из любой пары выходных сигналов двигателя, таких как скорость вращения, ток, крутящий момент, мощность и тому подобное.
В качестве примера и в соответствии с некоторыми вариантами выполнения, настоящее изобретение может быть выполнено в виде устройства, такого как контроллер насоса, имеющего процессор сигналов, выполненный с возможностью по меньшей мере:
получения сигнала, содержащего информацию о калиброванных данных скорости вращения и мощности двигателя для гидравлической насосной системы, и
определения расхода и давления в насосной системе, которые связаны с эквивалентной характеристической переменной гидравлической системы, с использованием трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на полученных сигналах.
Варианты выполнения настоящего изобретения могут также содержать один или несколько из следующих признаков:
Процессор сигналов может быть выполнен с возможностью обеспечения соответствующего сигнала, содержащего информацию о расходе и давлении в насосной системе, которые связаны с определенной эквивалентной характеристической переменной гидравлической системы.
Соответствующий сигнал может содержать информацию, используемую для управления гидравлической насосной системой.
Процессор сигналов или процессорный модуль может быть выполнен с возможностью определения расхода и давления в насосной системе, с использованием трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработанных сигналах, связанных с калиброванными данными скорости вращения и мощности двигателя.
Процессор сигналов или процессорный модуль может быть выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработанных сигналах, связанных с соотношением между гидравлическими, механическими и электрическими параметрами преобразования мощности от насоса к двигателю или приводу в гидравлической насосной системе.
Процессор сигналов или процессорный модуль может быть выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на некоторой комбинации следующих этапов:
обработки сигналов, связанных с уравнением №1:

где γ представляет собой соотношение преобразования мощности между гидравлическими, механическими и электрическими параметрами от насоса к приводу двигателя;
обработки, развязки и переназначении сигналов, связанных с функцией преобразования энергии вышеупомянутого уравнения №1, взятого для непосредственной формулировки соответствующего расхода в системе, давления в системе или дифференциального давления насоса, функций мощности двигателя в зависимости от скорости вращения двигателя и эквивалентных характеристик системы;
обработки сигналов, связанных с реконструированными 3D-функциями, представленными и разрешенными с получением расхода и давления насоса, которые связаны с неизвестными характеристиками системы при заданной скорости вращения двигателя и мощности, а также основываясь, по меньшей мере частично, на измеренных калибровочных данных насоса и двигателя;
обработки сигналов, связанных с соответствующими реконструированными 3D-функциями распределения мощности двигателя, расхода насоса и дифференциального давления насоса в зависимости от мощности и скорости вращения двигателя, как представлено уравнениями №2.1, 2.2. и 2.3, следующим образом:
 ,
,
 и
и
 .
.
где w, g и р являются функциями мощности W двигателя, расхода Q в системе и дифференциального давления Р насоса, в зависимости от скорости n вращения двигателя и эквивалентной характеристической переменной Cν системы;
обработки сигналов, связанных с дискретными развязанными и переназначенными 3D-функциями распределения расхода в системе, дифференциального давления насоса, мощности двигателя в зависимости от скорости вращения двигателя и эквивалентных характеристик системы, полученных из насосной системы;
обработки и получения, для пары заданных показаний W и n двигателя в произвольный момент времени, сигналов, связанных с неизвестной эквивалентной характеристической переменной Cν системы в вышеупомянутом уравнении №2.1;
обработки и получения сигналов, связанных с дифференциальным давлением Р и расходом Q насоса непосредственно из уравнения №3.1 и 3.2, следующим образом:
 и
и
 »
»
где  представляет собой инверсно переназначенную степенную функцию w; и
представляет собой инверсно переназначенную степенную функцию w; и
обработки и получения сигналов, связанных с дифференциальным давлением Р и расходом Q насоса, непосредственно с помощью заданной пары мощности W двигателя и скорости n вращения двигателя для Cν гидравлической системы.
Устройство может дополнительно содержать по меньшей мере одну память, содержащую компьютерный программный код; причем указанная по меньшей мере одна память и компьютерный программный код выполнены с возможностью, с помощью по меньшей мере одного процессора, инструктировать устройство по меньшей мере:
получать сигналы и
определять расход и давление в насосной системе, которые связаны с эквивалентной характеристической переменной гидравлической системы, с использованием трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на полученных сигналах. Устройство может содержать или принимать форму блока управления насосом или контроллера, включая ПИД-регулирование, имеющего процессор сигналов или процессорный модуль.
В соответствии с некоторыми вариантами выполнения, настоящее изобретение может быть выполнено в виде способа, включающего этапы получения в процессоре сигналов сигналов, содержащих информацию о калиброванных данных скорости вращения и мощности двигателя для гидравлической насосной системы, и определение, в процессоре сигналов, расхода и давления насоса, которые связаны с эквивалентной характеристической переменной гидравлической системы, с использованием трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на полученных сигналах.
Настоящее изобретение также может, например, быть выполнено в виде компьютерного программного продукта, имеющего машиночитаемый носитель с выполняемым компьютером кодом, встроенным в него для выполнения способа, например, при запуске в устройстве обработки сигналов, которое является частью такого контроллера насоса. В качестве примера, компьютерный программный продукт может, например, принимать форму компакт-диска, дискеты, флэш-карты, карты памяти, а также другие типы или виды запоминающих устройств, которые могут хранить такой исполняемый компьютером код на таком машиночитаемом носителе, либо известным в настоящее время, либо который будет разработан в будущем.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Чертежи включают в себя следующие фигуры, которые не обязательно приведены в масштабе:
Фиг. 1 включает Фиг. 1а, 1b и 1с, причем Фиг. 1а представляет собой схему вспомогательной гидравлической системы управления нагревом или охлаждением с насосом с переменной скоростью, которая известна в данной области техники; Фиг. 1b представляет собой схему насосной системы повышения давления воды, которая известна в данной области техники; и Фиг. 1с представляет собой график расхода (гал/мин) в зависимости от подпорного давления для выполнения способа адаптивного управления на основании кривой адаптивного управления, в котором сэкономленная гидравлическая мощность = dP⋅Q* при расходе Q* соответствует известной в данной области техники.
Фиг. 2 представляет собой блок-схему устройства, содержащего процессор сигналов, выполненный с возможностью реализации функции обработки сигналов, в соответствии с некоторыми вариантами выполнения настоящего изобретения.
Фиг. 3 представляет собой модель преобразования давления и расхода в системе, и электрической мощности и скорости вращения двигателя для гидравлической насосной системы, аналогичной показанной на Фиг. 1b.
Фиг. 4 представляет собой график расхода Q (гал/мин) в зависимости от давления Р (футов или фунтов/кв. дюйм), показывающий кривую дифференциального давления насоса при заданной скорости, сбалансированную с помощью характеристической кривой системы в точке равновесия.
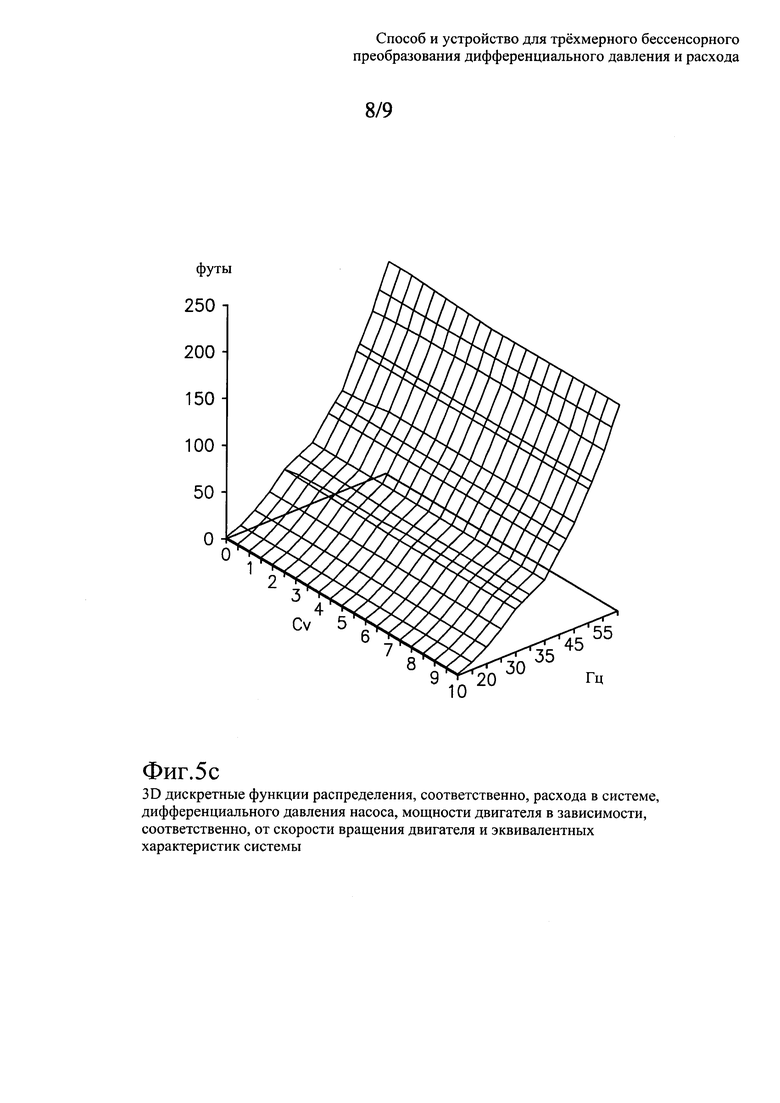
Фиг. 5 включает Фиг. 5а, 5b и 5с, изображающие дискретные 3D-функции распределения, соответственно, расхода в системе, дифференциального давления насоса, мощности двигателя в зависимости от скорости вращения двигателя и эквивалентных характеристик системы.
Фиг. 6 представляет собой график расхода (гал/мин) в зависимости от дифференциального давления (фунтов/кв. дюйм), показывающий сравнение показаний дифференциального давления насоса и расхода из преобразователя (штриховые линии) и датчиков (сплошные линии), в зависимости от скорости вращения двигателя.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Трехмерное дискретное бессенсорное преобразование
Настоящее изобретение обеспечивает новые и уникальные средства или способы трехмерного дискретного бессенсорного преобразования, разработанные для получения расхода и давления в системе для динамической гидравлической насосной системы в зависимости от сигналов двигателя, основываясь на калибровочных данных насоса и двигателя. Расход и давление в системе могут быть разрешены непосредственно и более точно, используя любую пару выходных сигналов двигателя, таких как скорость вращения, ток, крутящий момент, мощность, и тому подобное.
В качестве примера, на Фиг. 2 изображено устройство, в целом обозначенное номером позиции 10, выполненное в соответствии с некоторыми вариантами выполнения настоящего изобретения, которое содержит процессор сигналов или процессорный модуль 12 в сочетании с другими схемами и компонентами 14 процессора сигналов. Процессор 12 сигналов может быть выполнен с возможностью реализации функции обработки сигналов в соответствии с некоторыми вариантами выполнения настоящего изобретения.
В процессе работы процессор 12 может быть выполнен с возможностью по меньшей мере:
получения сигналов, содержащих информацию о калиброванных данных скорости вращения и мощности двигателя для гидравлической насосной системы, и
определения расхода и давления в насосной системе, которые связаны с эквивалентной характеристической переменной гидравлической системы, с использованием трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на полученных сигналах.
В качестве примера, сигналы могут быть получены из сохраненной базы данных, например, из той, которая является частью модуля памяти. Калиброванные данные скорости вращения и мощности двигателя могут быть определены путем обработки соответствующих сигналов, полученных от конкретного двигателя, например, во время полевых испытаний, и поступающих от конкретного центробежного насоса для управления так, как показано на Фиг. 1b. В качестве альтернативы, калиброванные данные скорости вращения и мощности двигателя могут быть определены путем обработки соответствующих сигналов, полученных от типичного двигателя в серии или классе насосов, например, протестированного производителем на заводе или заводе-изготовителе, и являющихся его частью или интегрированных в купленный двигатель, например, сохраненных в модуле памяти двигателя, насоса или контроллера насоса. Объем настоящего изобретения не предназначен быть ограниченным тем, как определены калиброванные данные скорости вращения и мощности двигателя, или присущи ли калиброванные данные скорости вращения и мощности двигателя конкретному двигателю или классу или серии двигателей и т.д.
Процессор 12 может быть также выполнен с возможностью обеспечения соответствующих сигналов, содержащих информацию о расходе и давлении в насосной системе, определенных, например, для того, чтобы управлять одним или несколькими насосами, показанными на Фиг. 1а, или центробежным насосом, показанным на Фиг. 1b.
В качестве еще одного примера, устройство 10 может принимать форму, или образовывать часть контроллера насоса, показанного на Фиг. 1а, или контроллера, показанного на Фиг. 1b. Объем настоящего изобретения предназначен включать предусмотренные варианты выполнения, в которых устройство 10 принимает форму или содержит один или несколько компонентов, например, гидравлической насосной системы, изображенной на Фиг. 1а и 1b.
Процессор 12 или процессорный модуль может быть выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма и обработки сигналов, связанной с такой моделью или алгоритмом, для реализации настоящего изобретения, например, в соответствии с тем, что показано на Фиг. 2, на основании, по меньшей мере частично, того, что сформулировано ниже следующим образом:
На Фиг. 3 схематично показана модель преобразования энергии между давлением в системе или дифференциальным давлением насоса и расходом, Р и Q, которые связанны с эквивалентной характеристической переменной Cν гидравлической системы на участке нагнетания насоса, и мощностью и скоростью вращения, W и n, двигателя на другом конце привода двигателя в произвольный момент времени.
На Фиг. 4 изображены гидравлические характеристики насоса и системы в зависимости от скорости вращения двигателя и мощности W, на котором схематически показаны кривые дифференциального давления насоса при заданной скорости вращения и мощности, пересекающиеся или сбалансированные с характеристической кривой системы в точке равновесия. Соответствующее математическое выражение может быть представлено как в уравнении №1 следующим образом:
 ,
,
где γ представляет собой коэффициент преобразования мощности между гидравлическими, механическими и электрическими параметрами от насоса к приводу насоса, который некоторым может показаться сложным по своей природе, так как КПД двигателя и насоса изменяется с изменением скорости вращения двигателя, давления и расхода в системе.
В соответствии с некоторыми вариантами выполнения настоящего изобретения, методика трехмерного распределения путем развязки и переназначения функции преобразования энергии уравнения №1 может быть использована для непосредственного формулирования соответствующего расхода в системе, давления в системе или дифференциального давления насоса, функций мощности двигателя в зависимости от скорости вращения двигателя и эквивалентных характеристик системы. Представленные здесь реконструированные 3D-функции затем могут быть разрешены, чтобы получить расход и давление насоса, которые связаны с любыми неизвестными характеристиками системы при заданной скорости вращения и мощности двигателя, основываясь, по меньшей мере частично, на измеренных калибровочных данных насоса и двигателя. Соответствующие реконструированные 3D-функции распределения мощности двигателя, расхода насоса, а также дифференциального давление насоса в зависимости от мощности и скорости вращения двигателя могут быть представлены, соответственно, уравнениями №2.1, 2.2. и 2.3, следующим образом:
 ,
,
 и
и
 ,
,
где w, g и р являются функциями мощности W двигателя, расхода Q в системе и дифференциального давления Р насоса, в зависимости от скорости n вращения двигателя и эквивалентной характеристической переменной Cν системы. Дискретные развязанные и переназначенные 3D-функции распределения расхода в системе, дифференциального давления насоса, мощности двигателя, в зависимости от скорости вращения двигателя и эквивалентных характеристик системы, полученные из реальной насосной системы, показаны, соответственно, на Фиг. 5 в виде 3D-функций распределения.
Для пары заданных показаний W и n двигателя в произвольный момент времени, неизвестная эквивалентная характеристическая переменная Cν системы в уравнении №2.1 может быть получена численно. Дифференциальное давление Р насоса и расход Q могут затем быть получены непосредственно из уравнения №3.1 и 3.2 следующим образом:
 и
и
 ,
,
где  представляет собой инверсно переназначенную степенную функцию w. Затем дифференциальное давление Р насоса и расход Q могут быть получены непосредственно с помощью заданной пары мощности W двигателя и скорости n вращения двигателя для Cν гидравлической системы.
представляет собой инверсно переназначенную степенную функцию w. Затем дифференциальное давление Р насоса и расход Q могут быть получены непосредственно с помощью заданной пары мощности W двигателя и скорости n вращения двигателя для Cν гидравлической системы.
Трехмерный бессенсорный преобразователь для дифференциального давления насоса и расхода насоса, в соответствии с некоторыми вариантами выполнения настоящего изобретения, был разработан и испытан в гидравлической системе с замкнутым контуром. На Фиг. 6 показано сравнение показаний дифференциального давления насоса и расхода насоса, полученных, соответственно, от преобразователя (пунктирные линии) и датчиков (сплошные линии), в зависимости от скорости вращения двигателя.
Калибровка с помощью измерительных приборов
Данные дифференциального давления насоса в уравнении №3 могут быть использованы для системы с замкнутым контуром, поскольку вся энергия, потребляемая системой, имеет вклад от потери системой на динамическое трение, которое связано только с дифференциальным давлением насоса. В качестве примера, для сбора калибровочных данных насосной системы может быть использован датчик дифференциального давления или датчик давления вместе с датчиком потока.
Для системы с открытым контуром со статическим давлением всасывания, могут быть непосредственно использованы данные давления в системе, полученные при калибровке в полевых испытаниях. Для системы с открытым контуром с переменным давлением всасывания, для калибровки вклада от давления и расхода в давление при всасывании может быть использован датчик давления на стороне всасывания насоса или датчик дифференциального давления в насосе.
Устройство 10
В качестве примера, функциональные возможности устройства 10 могут быть реализованы с помощью аппаратных средств, программного обеспечения, встроенного программного обеспечения или их комбинации. В типичной реализации программного обеспечения устройство 10 содержит одну или несколько архитектур на основе микропроцессоров, имеющих, например, по меньшей мере один элемент 12, аналогичный процессору сигналов или микропроцессору. Специалист в данной области техники должен быть в состоянии запрограммировать такую реализацию на основе микроконтроллера (или микропроцессора) для выполнения функциональности, описанной в настоящем документе, без излишнего экспериментирования. Объем настоящего изобретения не предназначен быть ограниченным какой-либо конкретной реализацией с использованием технологии, либо уже известной, либо той, которая будет разработана в будущем. Объем настоящего изобретения предназначен включать реализации функциональности процессоров 12 в качестве автономного процессора или процессорного модуля, как отдельного процессора или процессорных модулей, а также некоторой их комбинации.
Устройство может также содержать другие схемы или компоненты 14 процессора сигналов, например, в том числе элемент 14 в виде оперативного запоминающего устройства (ОЗУ) и/или постоянного запоминающего устройства (ПЗУ), устройств и блока управления вводом/выводом, а также соединяющих их шин данных и адресных шины, и/или по меньшей мере одного входного процессора и по меньшей мере одного выходного процессора.
Возможные Дополнительные Применения / Варианты Выполнения
В соответствии с настоящим изобретением, предусмотрены варианты выполнения, а объем изобретения предназначен включать устройство, например, принимающее форму средства и устройства трехмерного бессенсорного преобразования для дифференциального давления насоса и расхода насоса, содержащего одно или несколько из следующего:
Трехмерный цифровой бессенсорный преобразователь, который, например, выдает расход в системе и дифференциальное давление насоса, которые связаны с неизвестными системами, в зависимости от показаний скорости вращения и мощности двигателя, основываясь на калибровочных данных насоса и двигателя. Давление и расход в системе могут быть разрешены непосредственно и более точно из любой пары показаний двигателя, таких как скорость вращения, ток, крутящий момент, мощность, и так далее.
Несколько соответствующих 3D-функций, например, мощности двигателя, дифференциального давления насоса и расхода насоса, представлены в уравнениях 2 и 3, а также графически представлены на Фиг. 5.
Любые или все из потенциальных 3D дискретных численных методов переназначения, например, такие как 2D интерполяции, 2D сплайны и тому подобное.
Любые или все из потенциальных 2D или 3D дискретных или численных методов инверсии, например, такие как 1D или 2D прямая инверсия, минимизация, симплекс, и тому подобное.
Любые или все гидравлические насосные системы с замкнутым контуром или с открытым контуром, например, такие как первичные насосные системы, вторичные насосные системы, системы циркуляции воды, а также системы обеспечения подпорного давления. Указанные в настоящем документе системы могут иметь одну зону или нескольких зон.
В отношении калибровочных данных насоса, например, для гидравлической системы с замкнутым контуром в таком устройстве, данные дифференциального давления и расхода насоса, так как вся энергия, потребляемая системой, имеет вклад от потерь на динамическое трение, которое связано только с дифференциальным давлением насоса. Калибровочные данные могут включать данные давления в системе или давления в выпускной секции насоса и соответствующего расхода.
В отношении калибровочных данных насоса, например, для гидравлической системы с открытым контуром в таком устройстве, данные дифференциального давления и расхода насоса в зависимости от соответствующих данных двигателя. Для системы с открытым контуром со статическим давлением при всасывании данные давления и расхода в системе могут быть получены непосредственно в условиях полевых испытаний. Однако, для системы с открытым контуром с изменяющимся давлением всасывания, для калибровки вкладов давления и расхода в давление при всасывании может быть использован один датчик давления на стороне всасывания насоса или датчик дифференциального давления в насосе.
Что касается измеренных данных двигателя для такого устройства, например, может быть использована любая пара потенциальных электрических или механических показаний двигателя, таких как скорость вращения двигателя, ток, крутящий момент, мощность и тому подобное.
Что касается гидравлических сигналов для такого устройства, могут быть использованы, например, давление в системе, дифференциальное давление насоса, зональные давления, расходы в системе, зональные скорости потока и тому подобное.
Что касается передачи управляющих сигналов и технологии передачи, то могут быть использованы, например, все традиционные средства измерения и передачи, которые используются в настоящее время. Предпочтительно, беспроводные технологии передачи сигнала датчика будут оптимальными и предпочтительными.
Что касается насосов, упомянутых выше для гидравлических насосных систем, то могут быть использованы, например, один насос, циркулятор, группа параллельных групповых насосов или термостатов, группа последовательных групповых насосов или термостатов, или их комбинации.
Что касается системы регулирования потока, то могут быть использованы, например, ручные или автоматические регулирующие клапаны, ручные или автоматические регулирующие циркуляторы, или их комбинации.
Объем изобретения
Следует понимать, что, если не указано иное, то любой из признаков, характеристик, альтернатив или модификаций, описанных в отношении конкретного варианта выполнения настоящего изобретения, может также быть применен, использован или включен с любым другим вариантом выполнения, описанным в настоящем документе. Кроме того, чертежи в настоящем документе приведены не в масштабе.
Несмотря на то, что настоящее изобретение описано посредством примера в отношении центробежного насоса, объем настоящего изобретения предназначен включать и другие типы или виды насосов, либо известных в настоящее время, либо тех, которые будут разработаны в будущем.
Несмотря на то, что настоящее изобретение описано и проиллюстрировано в отношении его иллюстративных вариантов выполнения, вышеизложенное и другие различные дополнения и опущения могут быть выполнены в настоящем документе, не отступая от сущности и объема настоящего изобретения.







Изобретение относится к устройству для управления насосом. Устройство содержит процессор сигналов или процессорный модуль, который может быть выполнен с возможностью по меньшей мере получения сигналов, содержащих информацию о калиброванных данных скорости вращения и мощности двигателя для гидравлической насосной системы; и определения расхода и давления в насосной системе, которые связаны с эквивалентной характеристической переменной гидравлической системы, основываясь, по меньшей мере частично, на полученных сигналах. Процессор сигналов или процессорный модуль может быть выполнен с возможностью обеспечения соответствующего сигнала, содержащего информацию об определенных расходе и давлении в насосной системе. Соответствующие сигналы могут содержать информацию, используемую для управления гидравлической насосной системой. В результате расход и давление в системе могут быть определены непосредственно и более точно. 3 н. и 15 з.п. ф-лы, 10 ил.
1. Устройство для управления насосом, содержащее:
процессор сигналов или процессорный модуль, выполненный с возможностью по меньшей мере:
получения сигналов, содержащих информацию о калиброванных данных скорости вращения и мощности двигателя для одного или более насоса в гидравлической насосной системе, и
создания соответствующих сигналов, содержащих информацию для управления указанным одним или более насосом гидравлической насосной системы, путем определения расхода и давления в насосной системе, основываясь на дискретных 3D-функциях распределения дифференциального давления насоса, расхода в системе и мощности двигателя в зависимости от скорости вращения двигателя и по меньшей мере одной эквивалентной характеристической переменной Cv гидравлической системы, с использованием трехмерной бессенсорной модели или алгоритма и указанных полученных сигналов, причем
указанный процессор сигналов или процессорный модуль выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработке сигналов, относящихся к уравнению №1, следующим образом:

где γ представляет собой коэффициент преобразования мощности между гидравлическими, механическими и электрическими параметрами от насоса к приводу двигателя, представляющий собой функцию дифференциального давления Р насоса, расхода Q в системе, мощности W двигателя, скорости n вращения двигателя и эквивалентной характеристической переменной Cν системы.
2. Устройство по п. 1, в котором процессор сигналов или процессорный модуль выполнен с возможностью создания указанных соответствующих сигналов, используемых для управления.
3. Устройство по п. 1, в котором процессор сигналов или процессорный модуль выполнен с возможностью определения расхода и давления в насосной системе с использованием трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработке сигналов, связанных с калиброванными данными скорости вращения и мощности двигателя.
4. Устройство по п. 3, в котором процессор сигналов или процессорный модуль выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработке сигналов, связанных с коэффициентом преобразования мощности между гидравлическими, механическими и электрическими параметрами от насоса к двигателю или приводу в гидравлической насосной системе.
5. Устройство по п. 1, в котором указанная по меньшей мере одна эквивалентная характеристическая переменная гидравлической системы содержит эквивалентную характеристическую переменную гидравлической системы для расхода Q гидравлической насосной системы.
6. Устройство по п. 1, в котором указанная по меньшей мере одна эквивалентная характеристическая переменная гидравлической системы содержит эквивалентную характеристическую переменную гидравлической системы для давления Р гидравлической насосной системы.
7. Устройство по п. 2, в котором указанный процессор сигналов или процессорный модуль выполнен с возможностью
определения трехмерной бессенсорной модели или алгоритма, основываясь на уравнениях №2.1, 2.2 и 2.3, следующим образом:

определения неизвестной характеристической переменной Cν гидравлической системы для пары калиброванных показаний скорости вращения и мощности двигателя в произвольный момент времени, основываясь на функции мощности двигателя, следующим образом: w (W, n, Cv)=0, и
определения расхода и давления в насосной системе с помощью уравнений №3.1 и 3.2, основываясь на функциях расхода в системе и дифференциального давления насоса, следующим образом:

где w, g и р представляют собой трехмерные функции мощности W двигателя, расхода Q в системе и дифференциального давления Р насоса в зависимости от скорости n вращения двигателя и эквивалентной характеристической переменной Cν системы и где  представляет собой инверсно переназначенную степенную функцию w.
представляет собой инверсно переназначенную степенную функцию w.
8. Устройство для управления насосом, содержащее:
процессор сигналов или процессорный модуль, выполненный с возможностью по меньшей мере:
получения сигналов, содержащих информацию о калиброванных данных скорости вращения и мощности двигателя для одного или более насоса в гидравлической насосной системе, и
создания соответствующих сигналов, содержащих информацию для управления указанным одним или более насосом гидравлической насосной системы, путем определения расхода и давления в насосной системе, основываясь на дискретных 3D-функциях распределения дифференциального давления насоса, расхода в системе и мощности двигателя в зависимости от скорости вращения двигателя и по меньшей мере одной эквивалентной характеристической переменной Cν гидравлической системы, с использованием трехмерной бессенсорной модели или алгоритма и указанных полученных сигналов, причем
указанный процессор сигналов или процессорный модуль выполнен с возможностью определения расхода и давления в насосной системе с использованием трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработке сигналов, связанных с калиброванными данными скорости вращения и мощности двигателя,
указанный процессор сигналов или процессорный модуль выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработке сигналов, связанных с коэффициентом преобразования мощности между гидравлическими, механическими и электрическими параметрами от насоса к двигателю или приводу в гидравлической насосной системе, и
указанный процессор сигналов или процессорный модуль выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработке сигналов, относящихся к уравнению №1, следующим образом:

где γ представляет собой коэффициент преобразования мощности между гидравлическими, механическими и электрическими параметрами от насоса к приводу двигателя, представляющий собой функцию дифференциального давления Р насоса, расхода Q в системе, мощности W двигателя, скорости n вращения двигателя и эквивалентной характеристической переменной Cν системы.
9. Устройство по п. 8, в котором процессор сигналов или процессорный модуль выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработке, развязке и переназначении сигналов, связанных с функцией преобразования мощности уравнения (1), используемого непосредственно для получения соответствующих расхода в системе, давления в системе или дифференциального давления насоса, функций мощности двигателя в зависимости от скорости вращения двигателя и эквивалентных характеристик системы.
10. Устройство по п. 9, в котором процессор сигналов или процессорный модуль выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработке сигналов, связанных с реконструированными 3D-функциями, представленными и разрешенными, чтобы получить расход и давление насоса, которые связаны с неизвестными характеристиками системы при заданной скорости вращения и мощности двигателя, а также основываясь, по меньшей мере частично, на измеренных калибровочных данных насоса и двигателя.
11. Устройство по п. 10, в котором процессор сигналов или процессорный модуль выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработке сигналов, связанных с соответствующими реконструированными 3D-функциями распределения мощности двигателя, расхода насоса и дифференциального давления насоса, в зависимости от мощности и скорости вращения двигателя, как представлено уравнениями №2.1, 2.2 и 2.3, следующим образом:


где w, g и р представляют собой функции мощности W двигателя, расхода Q в системе и дифференциального давления Р насоса в зависимости от скорости n вращения двигателя и эквивалентной характеристической переменной Cν системы.
12. Устройство по п. 11, в котором процессор сигналов или процессорный модуль выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработке сигналов, связанных с дискретными развязанными и переназначенными 3D-функциями распределения расхода в системе, дифференциального давления насоса, мощности двигателя в зависимости от скорости вращения двигателя и эквивалентных характеристик системы, полученных из насосной системы.
13. Устройство по п. 12, в котором процессор сигналов или процессорный модуль выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработке и получении сигналов, для пары заданных показаний W и n двигателя в произвольный момент времени, связанных с неизвестной эквивалентной характеристической переменной Cν системы в уравнении №2.1.
14. Устройство по п. 13, в котором процессор сигналов или процессорный модуль выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработке и получении сигналов, связанных с дифференциальным давлением Р насоса и расходом Q насоса непосредственно из уравнения №3.1 и 3.2, следующим образом:


где  представляет собой инверсно переназначенную степенную функцию w.
представляет собой инверсно переназначенную степенную функцию w.
15. Устройство по п. 14, в котором процессор сигналов или процессорный модуль выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработке и получении сигналов, связанных с дифференциальным давлением Р насоса и расходом Q насоса, непосредственно с помощью заданной пары мощности W двигателя и скорости n вращения двигателя для Cν гидравлической системы.
16. Гидравлическая насосная система, содержащая:
один или более насосов и
контроллер, имеющий процессор сигналов или процессорный модуль, выполненный с возможностью по меньшей мере:
получения сигналов, содержащих информацию о калиброванных данных скорости вращения и мощности двигателя для указанного одного или более насоса,
создания сигналов контроллера, содержащих информацию для управления указанным одним или более насосом, путем определения расхода и давления в насосной системе, основываясь на дискретных 3D-функциях распределения дифференциального давления насоса, расхода в системе и мощности двигателя в зависимости от скорости вращения двигателя и по меньшей мере одной эквивалентной характеристической переменной Cν гидравлической системы, с использованием трехмерной бессенсорной модели или алгоритма и указанных полученных сигналов, причем
указанный процессор сигналов или процессорный модуль выполнен с возможностью реализации трехмерной бессенсорной модели или алгоритма, основываясь, по меньшей мере частично, на обработке сигналов, относящихся к уравнению №1, следующим образом:

где γ представляет собой коэффициент преобразования мощности между гидравлическими, механическими и электрическими параметрами от насоса к приводу двигателя, представляющий собой функцию дифференциального давления Р насоса, расхода Q в системе, мощности W двигателя, скорости n вращения двигателя и эквивалентной характеристической переменной Cν системы.
17. Система по п. 16, в которой указанный процессор сигналов или процессорный модуль выполнен с возможностью
определения трехмерной бессенсорной модели или алгоритма, основываясь на уравнениях №2.1, 2.2 и 2.3, следующим образом:

определения неизвестной характеристической переменной Cν гидравлической системы для пары калиброванных показаний скорости вращения и мощности двигателя в произвольный момент времени, основываясь на функции мощности двигателя, следующим образом: w (W, n, Cν)=0, и
определения расхода и давления в насосной системе, основываясь на уравнениях №3.1 и 3.2 для функций расхода в системе и дифференциального давления насоса, следующим образом:


где w, g и р представляют собой трехмерные функции мощности W двигателя, расхода Q в системе и дифференциального давления Р насоса в зависимости от скорости n вращения двигателя и эквивалентной характеристической переменной Cν системы и где  представляет собой инверсно переназначенную степенную функцию w.
представляет собой инверсно переназначенную степенную функцию w.
18. Система по п. 16, в которой указанная по меньшей мере одна эквивалентная характеристическая переменная гидравлической системы содержит эквивалентные характеристические переменные гидравлической системы для расхода Q и давления Р гидравлической насосной системы.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ТЕКУЧЕЙ СРЕДЫ, ИСПОЛЬЗУЕМОЙ ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ | 2006 |
|
RU2430401C2 |

