ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ
1. Область техники
Настоящее изобретение относится к технологиям управления работой насоса и, в частности, к способу и устройству для управления скоростью работы насоса, например, для систем нагрева или охлаждения воды для бытовых или промышленных применений.
2. Уровень техники
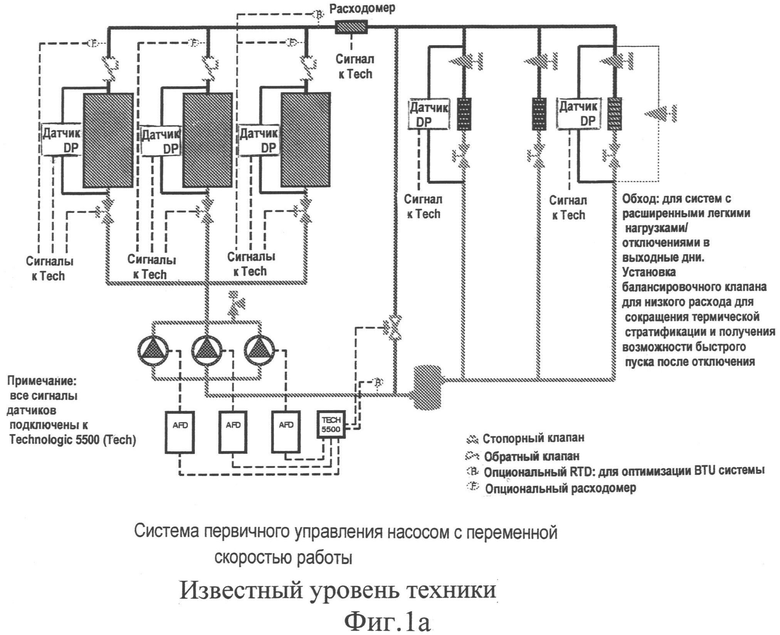
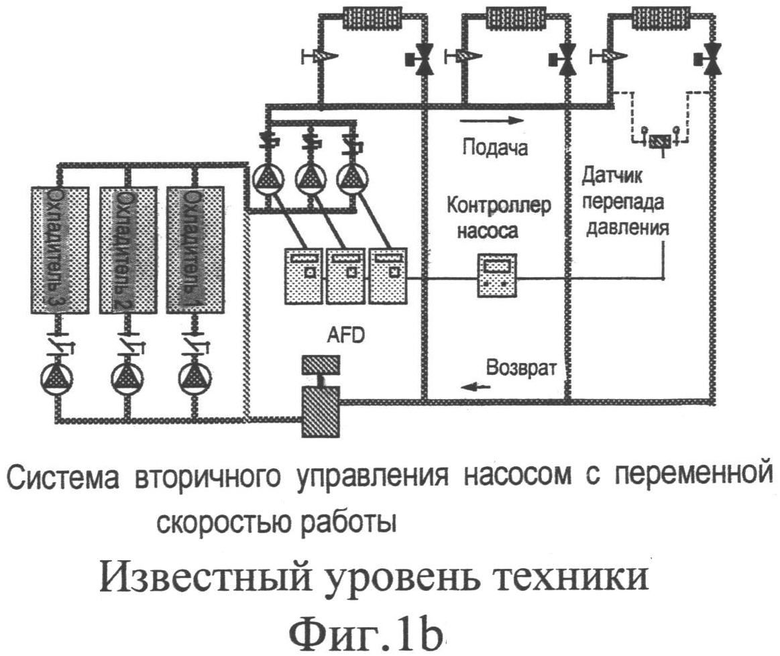
Современные технологии управления насосами с переменной скоростью работы для систем нагрева или охлаждения воды для бытовых или промышленных применений основаны на алгоритме пропорционально-интегрально-дифференциального (ПИД) управления в отношении зависимости перепада давления системы от постоянной контрольной точки давления. Некоторые другие параметры управления могут также представлять собой расход, мощность и т.д. Типичная система жидкостного нагрева или охлаждения воды показана схематически на фиг.1, включающей фиг.1a и фиг.1b. Соответствующие кривая системы и кривая управления для сбалансированной системы представлены на фиг.2. Способ управления с постоянной контрольной точкой, используемый в настоящее время в системе управления насосом, является очень простым и в течение многих лет применяется в области подачи воды для охлаждения и нагрева.
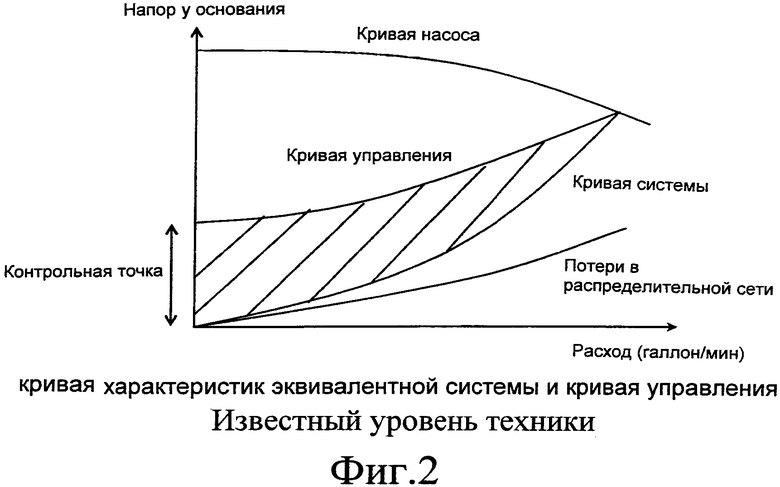
Однако специалисты в сфере управления насосами недавно заметили, что довольно значительное количество рабочей мощности, необходимой для работы насосов с использованием указанного способа, тратится впустую из-за того, что точка давления установлена намного выше, чем фактическое давление системы, действительно необходимое для удовлетворения расхода в данный момент времени, что показано заштрихованной областью на фиг.2.
В последнее время вопросы, касающиеся энергосбережения и защиты окружающей среды, стали очень актуальны. Все большее внимание уделяется всем приложениям управления, включая системы управления насосами для систем нагрева или охлаждения воды для бытовых или промышленных применений. Для уменьшения потребления электроэнергии и эксплуатационных затрат должны быть сделаны некоторые нововведения в существующий способ управления насосом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с некоторыми вариантами осуществления изобретения изобретение может быть выполнено в виде устройства, такого как контроллер насоса, содержащий по меньшей мере один процессор и по меньшей мере одну память, содержащую компьютерный программный код; при этом упомянутые по меньшей мере одна память и компьютерный программный код сконфигурированы так, чтобы с помощью по меньшей мере одного процессора обеспечивать выполнение устройством по меньшей мере следующего:
реагирования на сигнализацию, содержащую информацию о мгновенном давлении и расходе жидкости, перекачиваемой в насосной системе,
получения кривой переменной характеристики эквивалентной системы, также называемой в настоящем описании кривой адаптивного управления, на основе, по меньшей мере частично, мгновенного давления и расхода с использованием адаптивного фильтра скользящего среднего и
установки контрольной точки управления для переменного параметра системы на основе кривой адаптивного управления для получения требуемой скорости работы насоса посредством контроллера насоса, такого как пропорционально-интегрально-дифференциальный (ПИД) регулятор.
Варианты осуществления настоящего изобретения могут также включать один или более следующих признаков: устройство может содержать по меньшей мере один входной процессор, сконфигурированный для обеспечения выполнения устройством по меньшей мере обработки сигналов переменных параметров, включая сигнализацию, содержащую информацию о мгновенном давлении и расходе жидкости, перекачиваемой в насосной системе, или по меньшей мере один выходной процессор, сконфигурированный для обеспечения выполнения устройством по меньшей мере предоставления сигнала скорости работы электропривода насоса на основе, по меньшей мере частично, контрольной точки управления для переменного параметра системы на основе кривой адаптивного управления, или их комбинацию. Кривая адаптивного управления, SAMAt, например, может быть основана, по меньшей мере частично, на уравнении потока системы:

где функция AMAF - функция адаптивного фильтра скользящего среднего (adaptive moving average filter, AMAF), а параметры Q и ΔР - расход и перепад давления системы соответственно. По меньшей мере одна память и компьютерный программный код, например, могут быть сконфигурированы так, чтобы с помощью по меньшей мере одного процессора обеспечивать выполнение устройством по меньшей мере получения контрольной точки давления для оптимального управления на основе кривой адаптивного управления в отношении мгновенного расхода или скользящего среднего расхода в виде:
SPt=MA(Qt)/SAMAt,
где функция MA - функция фильтра скользящего среднего (MA). Функция адаптивного фильтра скользящего среднего может включать, например, использование функции фильтра скользящего среднего (MA) или функции адаптивного фильтра скользящего среднего для получения переменной кривой эквивалентной системы или кривой адаптивного управления соответственно, а также других типов или видов функций фильтра, либо уже известных, либо разработанных в будущем. По меньшей мере одна память и компьютерный программный код, например, также могут быть сконфигурированы так, чтобы с помощью по меньшей мере одного процессора обеспечивать выполнение устройством по меньшей мере получения скорости работы насоса с использованием ПИД-регулятора с помощью зависимости мгновенного давления системы от контрольной точки управления, полученной на основе кривой адаптивного управления. По меньшей мере одна память и компьютерный программный код, например, также могут быть быть сконфигурированы так, чтобы с помощью по меньшей мере одного процессора обеспечивать выполнение устройством по меньшей мере включения порогового значения в начало кривой адаптивного управления для согласования с начальной скоростью работы насоса. Устройство может являться, например, частью ПИД-регулятора, в том числе для использования в системе нагрева или охлаждения воды, а также в других типах или видах систем обработки жидкости, либо уже известных, либо разработанных в будущем. Устройство может являться, например, частью системы первичного управления или системы вторичного управления. Сигнализация для получения кривой адаптивного управления может включать, например, входные сигналы управления, содержащие информацию о давлении, или перепадах давления системы, или зоны вместе с расходами системы, или зоны, или другие производные сигналы, включая мощность или кручение.
Устройство может также быть выполнено, например, в виде контроллера или контроллера насоса, содержащего по меньшей мере один сигнальный процессор и по меньшей мере одно запоминающее устройство, содержащее компьютерный программный код, при этом по меньшей мере одно запоминающее устройство и компьютерный программный код, например, могут быть сконфигурированы так, чтобы с помощью по меньшей мере одного процессора обеспечивать выполнение устройством по меньшей мере реализации описанных выше функций устройства. Варианты осуществления контроллера могут включать, например, один или более описанных выше признаков. Контроллер может также являться, например, частью насосной системы или установки, которая содержит насос.
Настоящее изобретение может также включать, например, способ, содержащий шаги для управления насосом, включая реагирование на сигнализацию, содержащую информацию о мгновенном давлении и расходе жидкости, перекачиваемой в насосной системе, получение кривой адаптивного управления на основе, по меньшей мере частично, мгновенного давления и расхода с использованием адаптивного фильтра скользящего среднего и установку контрольной точки управления для переменного параметра системы на основе кривой адаптивного управления для получения требуемой скорости работы насоса посредством контроллера насоса, такого как пропорционально-интегрально-дифференциальный (ПИД) регулятор. Варианты осуществления способа могут включать, например, другие шаги для реализации одного или более описанных выше признаков.
Настоящее изобретение может также включать, например, компьютерный программный продукт, содержащий машиночитаемый носитель с исполняемым компьютером кодом, для реализации способа при его исполнении на устройстве обработки сигналов, которое является частью контроллера насоса. Компьютерный программный продукт может включать, например, компакт-диск, дискету, флэш-память, карту памяти, а также любые другие типы или виды запоминающих устройств, которые могут хранить исполняемый компьютером код на машиночитаемом носителе, либо известном в настоящее время, либо разработанном в будущем.
Одним из преимуществ настоящего изобретения является то, что оно позволяет сократить энергопотребление и эксплуатационные затраты.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Чертежи выполнены не в масштабе.
Фиг.1 включает фиг.1a и фиг.1b, где фиг.1a представляет схему системы первичного управления насосом с переменной скоростью работы в соответствии с известным уровнем техники, а фиг.1b представляет схему системы вторичного управления насосом с переменной скоростью работы в соответствии с известным уровнем техники.
Фиг.2 представляет график кривой характеристики эквивалентной системы и кривой управления в соответствии с известным уровнем техники.
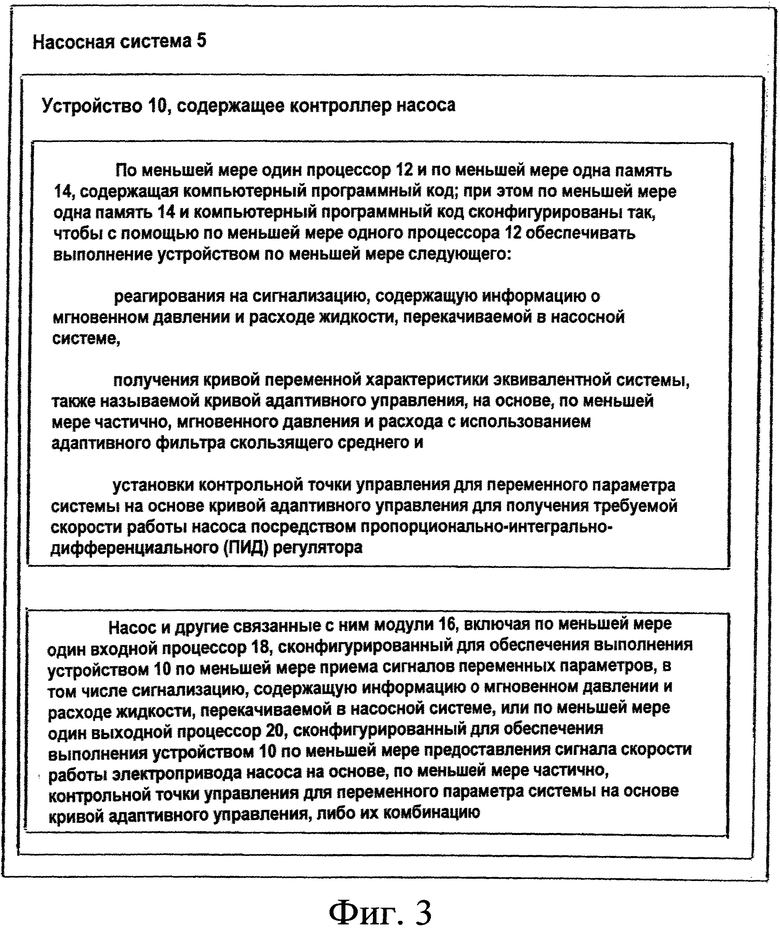
Фиг.3 представляет схему насосной системы, содержащей устройство, выполненное с возможностью реализации функций некоторых вариантов осуществления настоящего изобретения.
Фиг.3а представляет график новой кривой контрольной точки управления в виде зависимости напора у основания от расхода (галлон/мин) (qpm) в соответствии с некоторыми вариантами осуществления настоящего изобретения.
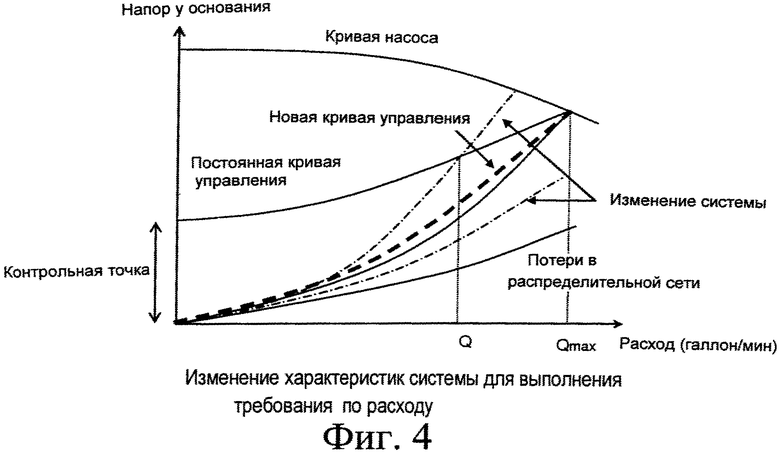
Фиг.4 представляет график изменения характеристик системы в виде зависимости напора у основания от расхода (галлон/мин) в соответствии с некоторыми вариантами осуществления настоящего изобретения.
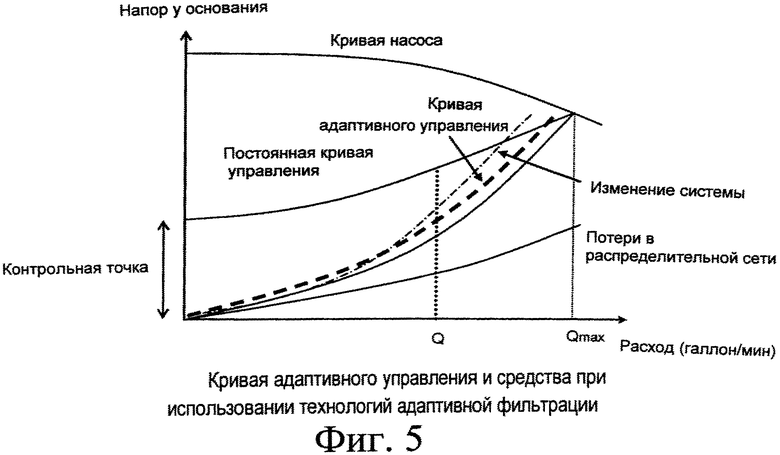
Фиг.5 представляет график кривой адаптивного управления в виде зависимости напора у основания от расхода (галлон/мин) в соответствии с некоторыми вариантами осуществления настоящего изобретения.
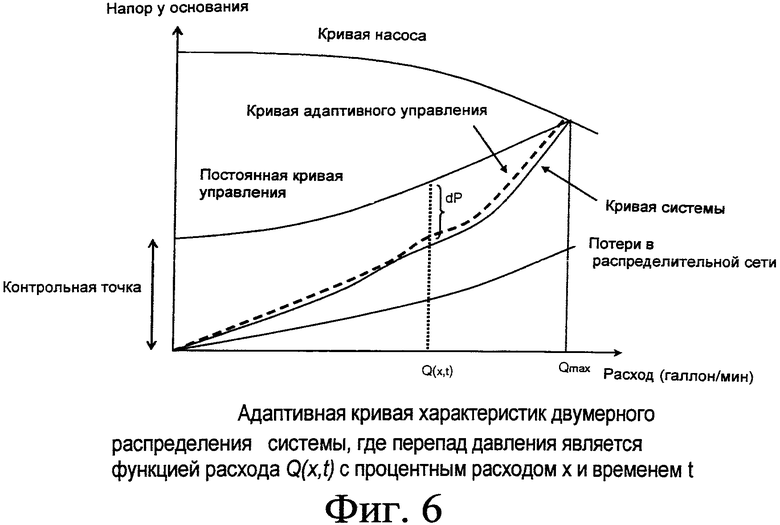
Фиг.6 представляет график кривой адаптивного управления для характеристик двумерного распределения системы в виде зависимости напора у основания от расхода (галлон/мин), где перепад давления является функцией расхода Q(x, t) с процентным расходом x и временем t в соответствии с некоторыми вариантами осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фиг.3 настоящее изобретение представлено в форме устройства 10, такого как контроллер насоса, содержащий по меньшей мере один процессор 12 и по меньшей мере одну память 14, содержащую компьютерный программный код, при этом по меньшей мере одна память 14 и компьютерный программный код сконфигурированы так, чтобы с помощью по меньшей мере одного процессора 12 обеспечивать выполнение устройством по меньшей мере реагирования на сигнализацию, содержащую информацию о мгновенном давлении и расходе жидкости, перекачиваемой в насосной системе, получения кривой переменной характеристики эквивалентной системы, также называемой в настоящем документе кривой адаптивного управления, на основе, по меньшей мере частично, мгновенного давления и расхода с использованием адаптивного фильтра скользящего среднего и установки контрольной точки управления для переменного параметра системы на основе кривой адаптивного управления для получения требуемой скорости работы насоса посредством контроллера насоса, такого как ПИД-регулятор. Как показано, устройство 10 является частью насосной системы 5, также содержащей насос и один или более связанных с насосом модулей 16. Например, насосная система 5 может представлять собой систему нагрева или охлаждения воды для бытовых или промышленных применений, соответствующую системе, описанной в настоящем документе. Объем изобретения включает системы нагрева или охлаждения воды для бытовых или промышленных применений, как уже известных, так и разработанных в будущем. Кроме того, настоящее изобретение описывается на примерах в отношении использования одного и того же контроллера насоса, такого как ПИД-регулятор или контроллер. ПИД-регуляторы или контроллеры известны в области техники, и изобретение не ограничено конкретным типом или видом ПИД-регулятора, включая технологии ПИД-регулятора или контроллера, как уже известные, так и разработанные в будущем. На основе описания настоящего изобретения, специалист сможет реализовать функции настоящего изобретения, соответствующие использованию такого ПИД-регулятора или контроллера без лишнего экспериментального исследования. Более того, объем изобретения включает реализации настоящего изобретения с использованием других типов или видов регуляторов или контроллеров, как уже известных, так и разработанных в будущем.
Один или более других связанных с насосом модулей 16 могут также включать по меньшей мере один входной процессор 18, сконфигурированный для обеспечения выполнения устройством 10 по меньшей мере приема сигналов переменных параметров, включая сигнализацию, содержащую информацию о мгновенном давлении и расходе жидкости, перекачиваемой в насосной системе 5, или по меньшей мере один выходной процессор 20, сконфигурированный для обеспечения выполнения устройством 10 по меньшей мере предоставления сигнала скорости работы электропривода насоса на основе, по меньшей мере частично, контрольной точки управления для переменного параметра системы на основе кривой адаптивного управления, или комбинацию по меньшей мере одного входного процессора 18 и по меньшей мере одного выходного процессора 20.
В действительности, устройство 10 в соответствии с настоящим изобретением выполнено с возможностью предоставления новой технологии или подхода для управления насосом посредством кривой контрольной точки, вместо постоянной контрольной точки, в качестве кривой управления, а также средств для управления насосом в системах нагрева или охлаждения воды для бытовых или промышленных применений, в соответствии с фиг.3a, где иллюстрируется новый подход управления с использованием кривой контрольной точки, при котором сэкономленная гидравлическая мощность равна dp*Q при расходе Q. В этом новом подходе функция кривой управления по существу ближе к проектной кривой системы, и может быть уменьшена рабочая мощность, затрачиваемая на управление насосом, показанная в виде заштрихованной области на фиг.2. Например, может быть сэкономлено от 5 до 10% рабочей мощности при работе насосов с использованием способа управления в соответствии с настоящим изобретением.
Предлагаемый способ управления с помощью кривой контрольной точки, описанный в настоящем документе, может использоваться для достижения по существу оптимального управления в соответствии с любыми характеристиками системы для энергосбережения и сокращения эксплуатационных затрат. Однако, подобно известному подходу с использованием постоянной контрольной точки, новый подход не является по своей природе саморегулируемым, в то время как характеристики системы могут меняться время от времени в связи с изменением положения управляющих клапанов для выполнения требования по расходу для контрольной точки, в соответствии с фиг.4. Чтобы обеспечить хорошую работу способа, устройство 10 может быть выполнено с возможностью выбора кривой управления, которая охватывает предельные варианты работы системы.
Настоящее изобретение также включает способ управления, который может использоваться для отслеживания переменных характеристик системы и для установки контрольной точки управления в соответствии с требованием по расходу. Если это возможно, насосами управляют посредством адаптивной кривой контрольной точки относительно переменных характеристик системы с самокалибровкой. Соответственно, могут быть сокращены эксплуатационные затраты системы, и может быть сэкономлена энергия.
Предпочтительный вариант кривых контрольной точки и средств управления насосами для систем нагрева или охлаждения воды для бытовых или промышленных применений может включать кривую адаптивного управления и способ, который отслеживает мгновенные переменные характеристики системы с помощью технологий адаптивных фильтров и устанавливает контрольную точку управления, в соответствии со схематической иллюстрацией на фиг.5. Как показано, кривая адаптивного управления, SAMAt, может быть получена из сигналов мгновенного давления и расхода посредством адаптивного фильтра скользящего среднего на основе уравнения потока системы с самокалибровкой:

где функция AMAF - функция адаптивного фильтра скользящего среднего, a Q и ΔP - мгновенный расход и перепад давления системы соответственно.
Контрольная точка давления для оптимального управления может быть получена на основе кривой адаптивного управления в отношении мгновенного расхода или скользящего среднего расхода в виде:
SPt=MA(Qt)∗SAMAt+b, (2)
где функция МА - функция фильтра скользящего среднего (МА), а параметр b - небольшое смещение постоянного давления. Следует отметить, что функция AMAF могла бы также быть заменена функцией фильтра скользящего среднего (MA) или любыми другими подобными адаптивными фильтрами, соответственно, либо известными в настоящее время, либо разработанными в будущем. Изобретение не ограничено типом или видом функции фильтра. На фиг.5 представлена кривая адаптивного управления и способ использования технологий адаптивной фильтрации в соответствии с настоящим изобретением. Кривые адаптивного управления и способ управления насосами для систем нагрева или охлаждения воды для бытовых или промышленных применений в соответствии с настоящим изобретением могут также включать пороговое значение в начале кривой управления для согласования с минимальной скоростью работы насоса.
Для системы с характеристиками произвольного распределения, где перепад давления P(x, t) является функцией расхода Q(x, t) с процентным расходом x и временем t, как показано на фиг.6, кривая адаптивного управления и контрольная точка могут быть записаны в виде:

SPx,t=MA(Qx,t)∗SAMAx,t+b. (4)
Здесь функция AMAF является двумерным адаптивным фильтром скользящего среднего в отношении мгновенного процентного расхода x системы и времени t соответственно.
Как описано выше, уравнения кривой адаптивного управления, представленные выше, могут использоваться для отслеживания переменных характеристик системы и для установки контрольной точки управления соответственно. Затем от ПИД-регулятора может быть получена скорость работы насоса в отношении полученной контрольной точки и мгновенного давления системы.
В общем, при работе системы, выполненной только с автоматически управляемыми циркуляционными насосами, нет существенного изменения характеристик системы. Другими словами, система имеет почти постоянный характер. Изменение характеристик системы происходит только тогда, когда зона или подсистема выключается или включается, из-за потерь на трение в распределительном трубопроводе системы.
Однако для системы с некоторыми автоматическими управляющими клапанами характеристики системы носят, в общем, динамический характер. Характеристики системы могут изменяться, когда любой из упомянутых управляющих клапанов в системе изменяет свое положение в связи с любым изменением температуры. Отклонение может также случиться тогда, когда любая подсистема или зона в здании, например, выключается или включается на некоторый период времени.
Поскольку адаптивный фильтр скользящего среднего используется для вычитания кривой адаптивного управления, чувствительность изменения кривой управления к любому изменению мгновенной характеристики системы может быть тесно связана с периодом дискретизации сигналов и длиной фильтра. Чем больше длина фильтра и период дискретизации, тем меньше и медленнее реакция кривой адаптивного управления на любое мгновенное изменение в системе. Следовательно, для выполнения конкретного требования по расходу кривая адаптивного управления может находиться где-то между кривой управления с постоянной контрольной точкой и кривой потерь на трение в распределительном трубопроводе в соответствии с фиг.5 или 6, где постоянная контрольная точка может использоваться в качестве верхнего предела.
В идеале полученная кривая адаптивного управления может находиться около кривой системы в ее сбалансированном положении и быть слегка нечувствительной к любому мгновенному или краткосрочному изменению характеристик системы, но в то же время оставаться способной отслеживать долговременное изменение характеристики системы, прежде всего, для выполнения требования по расходу в системе. Для экономии энергии важно и необходимо обеспечить медленное и слабое реагирование на кривую адаптивного управления, в сравнении с известным подходом с использованием постоянной контрольной точки. Чем меньше и медленнее реагирование кривой адаптивного управления на любые мгновенные изменения характеристик системы и чем больше разница между кривой управления с постоянной контрольной точкой и кривой адаптивного управления, тем больше энергии может быть сэкономлено.
Кривая адаптивного управления, предлагаемая в настоящем изобретении, может использоваться не только в системе первичного управления, но также и в системе вторичного управления.
Зоны, подсистемы или системы, упомянутые в настоящем документе, для систем нагрева или охлаждения воды для бытовых или промышленных применений могут содержать: управляющие клапаны с автоматическим и ручным управлением; циркуляционные насосы с автоматическим и ручным управлением; управляющие клапаны, а также циркуляционные насосы, упомянутые выше; множество зон с комбинациями управляющих клапанов и циркуляционных насосов.
Входные сигналы управления для получения адаптивной кривой контрольной точки могут включать, например: давление или перепады давления системы или зоны вместе с сигналами о расходе системы или зоны или некоторые другие производные сигналы, например скорость работы насоса, мощность, кручение и т.д.
Насосы, упомянутые в настоящем документе, для систем нагрева или охлаждения воды для бытовых или промышленных применений, включают: одиночный насос, группу параллельно соединенных насосов; группу последовательно соединенных насосов; комбинации из параллельно и последовательно соединенных насосов.
Следуя кривым контрольной точки управления в соответствии с некоторыми вариантами осуществления настоящего изобретения, могут быть непосредственно использованы те же средства каскадного подключения и отключения насосов, что и применяемые в известных системах управления, в соответствии с принципами суперпозиции с головной насосной системой.
Эксплуатация множества насосов при более низких скоростях работы при каскадном подключении и отключении может также позволить сэкономить больше энергии. Одним из примеров является установка скорости работы при каскадном подключении около 65% от полной скорости работы и скорости работы при каскадном отключении около 55% от полной скорости работы, для которой может быть сэкономлено около от 5% до 20% гидравлической энергии, если использовать два насоса вместо одного.
В общем, кривая контрольной точки адаптивного управления и способ в соответствии с настоящим изобретением могут использоваться для получения контрольной точки для оптимального управления в соответствии с любой динамической системой. Может быть оптимизирована эффективность управления насосами и работы гидравлической системы. Также могут быть сокращены эксплуатационные затраты и сэкономлена энергия.
Устройство 10
В качестве примера функции устройства 10 могут быть реализованы с использованием аппаратного обеспечения, программного обеспечения, встроенного программного обеспечения или их комбинации. В типичной программной реализации устройство 10 содержит одну или более архитектур на базе микропроцессора, содержащих, например, по меньшей мере один процессор или микропроцессор, подобный элементу 12, оперативное запоминающее устройство (ОЗУ) (RAM) и/или постоянное запоминающее устройство (ПЗУ) (ROM), подобные элементу 14, устройства ввода/вывода и управления, а также шины данных и адреса, соединяющие вышеупомянутый и/или по меньшей мере один входной процессор 18 и по меньшей мере один выходной процессор 20. Специалист сможет запрограммировать такую реализацию на базе микроконтроллера (микропроцессора) для выполнения функций, описанных в настоящем документе, без лишнего экспериментального исследования. Настоящее изобретение не ограничено конкретной технологией, либо уже известной, либо разработанной в будущем. Объем изобретения включает реализацию функций процессоров 12, 14, 16, 18 в виде автономного процессора или процессорного модуля, в виде отдельного процессора или процессорных модулей, а также их комбинаций.
Объем изобретения
Следует понимать, что, если в настоящем документе не указано иное, любой из признаков, характеристик, альтернатив или модификаций, описанных в отношении конкретного варианта осуществления изобретения, может быть применен, использован или объединен с любым другим вариантом осуществления изобретения. Кроме того, чертежи в настоящем документе выполнены не в масштабе.
Хотя настоящее изобретение описано с помощью примеров применительно к центробежному насосу, изобретение может использоваться для других типов или видов насосов, либо уже известных, либо разработанных в будущем.
Несмотря на то что изобретение было описано и проиллюстрировано в отношении примеров его осуществления, в них могут быть сделаны вышеприведенные и различные другие дополнения или опущения в пределах сущности настоящего изобретения.
Устройство содержит процессор и память, содержащую компьютерный программный код, сконфигурированные для реагирования на сигнализацию, содержащую информацию о мгновенном давлении и расходе жидкости, перекачиваемой в насосной системе, и получения кривой адаптивного управления на основе мгновенного давления и расхода с использованием адаптивного фильтра скользящего среднего. Адаптивный фильтр скользящего среднего основан на уравнении потока системы, относящемся к адаптивному фильтру скользящего среднего (AMAF), расходу и перепаду давления системы соответственно. Процессор, память и компьютерный программный код также сконфигурированы для получения контрольной точки давления для оптимального управления на основе кривой адаптивного управления в отношении мгновенного расхода или скользящего среднего расхода для получения требуемой скорости работы насоса посредством ПИД-регулятора. 3 н. и 19 з.п. ф-лы, 8 ил.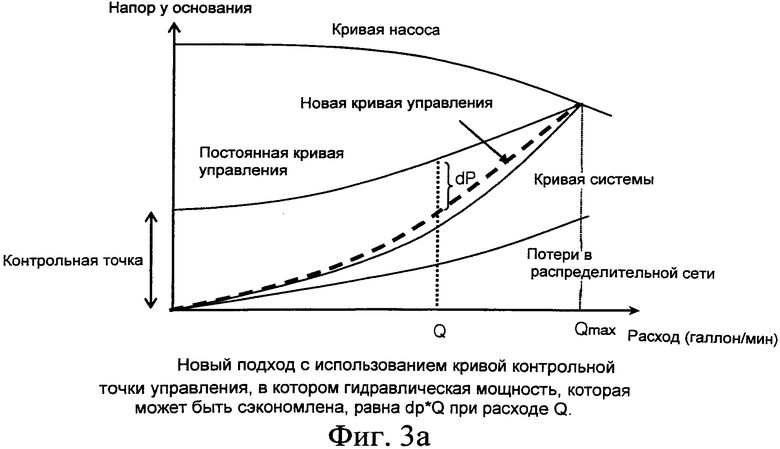
1. Устройство, содержащее:
по меньшей мере один процессор и
по меньшей мере одну память, содержащую компьютерный программный код;
при этом упомянутые по меньшей мере один машиночитаемый носитель или память и компьютерный программный код сконфигурированы так, чтобы с помощью по меньшей мере одного процессора обеспечивать выполнение устройством по меньшей мере следующего:
реагирования на сигнализацию, содержащую информацию о мгновенном давлении и расходе жидкости, перекачиваемой в насосной системе,
получения кривой адаптивного управления на основе, по меньшей мере частично, мгновенного давления и расхода с использованием адаптивного фильтра скользящего среднего,
установки контрольной точки управления для переменного параметра системы на кривой адаптивного управления для получения требуемой скорости работы насоса посредством устройства управления насосом или контроллера насоса, включающего ПИД (пропорционально-интегрально-дифференциальный) - регулятор, и
определения сигнала скорости электропривода насоса на основе, по меньшей мере частично, контрольной точки управления для переменного параметра системы на кривой адаптивного управления.
2. Устройство по п.1, где кривая адаптивного управления, SAMAt, основана, по меньшей мере частично, на уравнении потока системы:

где функция AMAF - адаптивный фильтр скользящего среднего (AMAF), а параметры Q и ΔР - расход и перепад давления системы соответственно.
3. Устройство по п.2, в котором по меньшей мере одна память и компьютерный программный код сконфигурированы так, чтобы с помощью по меньшей мере одного процессора обеспечивать выполнение устройством по меньшей мере получения контрольной точки давления для оптимального управления на основе кривой адаптивного управления в отношении мгновенного расхода или скользящего среднего расхода в виде:

где функция МА - фильтр скользящего среднего (МА).
4. Устройство по п.1, в котором адаптивный фильтр скользящего среднего включает использование функции фильтра скользящего среднего (МА) или функции адаптивного фильтра скользящего среднего для получения кривой адаптивного управления, соответственно.
5. Устройство по п.1, в котором по меньшей мере один машиночитаемый носитель или память и компьютерный программный код сконфигурированы так, чтобы с помощью по меньшей мере одного процессора обеспечивать выполнение устройством по меньшей мере получения скорости работы насоса с использованием устройства управления насосом или контроллера насоса, включающего ПИД-регулятор, с помощью зависимости мгновенного давления системы от контрольной точки управления, полученной на основе кривой адаптивного управления.
6. Устройство по п.1, в котором по меньшей мере один машиночитаемый носитель или память и компьютерный программный код сконфигурированы так, чтобы с помощью по меньшей мере одного процессора обеспечивать выполнение устройством по меньшей мере включения порогового значения в начало кривой адаптивного управления для согласования с начальной скоростью работы насоса.
7. Устройство по п.1, которое является частью устройства управления насосом или контроллера насоса, включающего ПИД-регулятор, в том числе для использования в системе нагрева или охлаждения воды.
8. Устройство по п.1, которое является частью системы первичного управления или системы вторичного управления.
9. Устройство по п.1, в котором сигнализация для получения кривой адаптивного управления включает входные сигналы управления, содержащие информацию о давлении или перепадах давления системы или зоны вместе с расходом системы или зоны, или другие производные сигналы, включая мощность или кручение.
10. Способ, включающий
выполнение следующих шагов с помощью устройства, содержащего по меньшей мере один процессор и по меньшей мере один машиночитаемый носитель или память с компьютерным программным кодом:
реагирование на сигнализацию, содержащую информацию о мгновенном давлении и расходе жидкости, перекачиваемой в насосной системе;
получение кривой адаптивного управления на основе, по меньшей мере частично, мгновенного давления и расхода с использованием адаптивного фильтра скользящего среднего и
установку контрольной точки управления для переменного параметра системы на кривой адаптивного управления для получения требуемой скорости работы насоса посредством устройства управления насосом или контроллера насоса, включающего ПИД-регулятор, и
определение сигнала скорости электропривода насоса на основе, по меньшей мере частично, контрольной точки управления для переменного параметра системы на кривой адаптивного управления.
11. Способ по п.10, где кривая адаптивного управления основана, по меньшей мере частично, на уравнении потока системы:

где функция AMAF - функция адаптивного фильтра скользящего среднего (AMAF), а параметры Q и ΔР - расход и перепад давления системы соответственно.
12. Способ по п.11, где по меньшей мере один машиночитаемый носитель или память и компьютерный программный код сконфигурированы так, чтобы с помощью по меньшей мере одного процессора обеспечивать выполнение устройством по меньшей мере получения контрольной точки давления для оптимального управления на основе кривой адаптивного управления в отношении мгновенного расхода или скользящего среднего расхода в виде:
где функция МА - функция фильтра скользящего среднего (МА).
13. Способ по п.10, в котором адаптивный фильтр скользящего среднего включает использование функции фильтра скользящего среднего (МА) или функции адаптивного фильтра скользящего среднего для получения кривой адаптивного управления соответственно.
14. Способ по п.10, где по меньшей мере один машиночитаемый носитель или память и компьютерный программный код сконфигурированы так, чтобы с помощью по меньшей мере одного процессора обеспечивать выполнение устройством по меньшей мере получения скорости работы насоса с использованием устройства управления насосом или контроллера насоса, включающего ПИД-регулятор, с помощью зависимости мгновенного давления системы от контрольной точки управления, полученной на основе кривой адаптивного управления.
15. Способ по п.10, где по меньшей мере один машиночитаемый носитель или память и компьютерный программный код сконфигурированы так, чтобы с помощью по меньшей мере одного процессора обеспечивать выполнение устройством по меньшей мере включения порогового значения в начало кривой адаптивного управления для согласования с начальной скоростью работы насоса.
16. Способ по п.10, где упомянутое устройство является частью устройства управления насосом или контроллера насоса, включающего ПИД-регулятор, в том числе для использования в системе нагрева или охлаждения воды.
17. Способ по п.10, где упомянутое устройство является частью системы первичного управления или системы вторичного управления.
18. Способ по п.10, в котором сигнализация для получения кривой адаптивного управления включает входные сигналы управления, содержащие информацию о давлении или перепадах давления системы или зоны вместе с расходом системы или зоны, или другие производные сигналы, включая мощность или кручение.
19. Устройство, включающее систему, содержащую контроллер насоса, содержащий:
по меньшей мере один процессор;
по меньшей мере один машиночитаемый носитель или память с компьютерным программным кодом, сконфигурированные так, чтобы с помощью по меньшей мере одного процессора обеспечивать выполнение контроллером насоса по меньшей мере следующего:
реагирования на сигнализацию, содержащую информацию о мгновенном давлении и расходе жидкости, перекачиваемой насосом в насосной системе,
получения кривой адаптивного управления на основе, по меньшей мере частично, мгновенного давления и расхода с использованием адаптивного фильтра скользящего среднего,
установки контрольной точки управления для переменного параметра системы на кривой адаптивного управления для получения требуемой скорости работы насоса посредством устройства управления насосом или контроллера насоса, включающего ПИД-регулятор, и
определения сигнала скорости электропривода насоса на основе, по меньшей мере частично, контрольной точки управления для переменного параметра системы на кривой адаптивного управления.
20. Устройство по п.1, содержащее
или по меньшей мере один входной процессор, выполненный с возможностью приема сигналов переменных параметров, включающих сигнализацию, содержащую информацию о мгновенном давлении и расходе жидкости, перекачиваемой в насосной системе,
или по меньшей мере один выходной процессор, выполненный с возможностью предоставления упомянутого сигнала скорости электропривода насоса,
или их комбинацию.
21. Способ по п.10, включающий
или прием по меньшей мере в одном входном процессоре сигналов переменных параметров, включающих сигнализацию, содержащую информацию о мгновенном давлении и расходе жидкости, перекачиваемой в насосной системе,
или предоставление с помощью по меньшей мере одного выходного процессора упомянутого сигнала скорости электропривода насоса,
или их комбинацию.
22. Устройство по п.19, содержащее
или по меньшей мере один входной процессор, выполненный с возможностью приема сигналов переменных параметров, включающих сигнализацию, содержащую информацию о мгновенном давлении и расходе жидкости, перекачиваемой в насосной системе,
или по меньшей мере один выходной процессор, выполненный с возможностью предоставления упомянутого сигнала скорости электропривода насоса для насоса,
или их комбинацию.
| US 7143016 B1, 28.11.2006 | |||
| US US2007154321 A1, 05.07.2007 | |||
| US 6045331 A, 04.04.2004 | |||
| ЦИРКУЛЯЦИОННЫЙ НАСОС ДЛЯ СИСТЕМ ОТОПЛЕНИЯ И/ИЛИ КОНДИЦИОНИРОВАНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРА, ХАРАКТЕРНОГО ДЛЯ ТАКОЙ СИСТЕМЫ, И САМА СИСТЕМА | 2005 |
|
RU2377444C2 |

