[0001] Настоящее изобретение в общем относится к определению близости транспортного средства и, в частности, к обеспечению визуального индикатора при нахождении транспортного средства на требуемом расстоянии от объекта.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] В настоящее время имеется множество различных систем помощи при парковке для помощи водителю при выполнении парковки транспортного средства. Например, некоторые транспортные средства включают в себя бортовую систему определения близости, которая звуковым образом предупреждает водителя, используя короткие «гудки» или другие звуки, при приближении транспортного средства к стене или другому объекту позади транспортного средства. В некоторых случаях предупредительные звуки изменяют, например, частоту и/или высоту для указания количества пространства, оставшегося между транспортным средством и объектом, и/или для передачи более интенсивного или более настойчивого предупреждения при уменьшении оставшегося пространства. Однако один из недостатков таких систем определения близости заключается в том, что предупредительные звуки может быть сложно перевести в расстояние, исчисляемое в футах или дюймах. Также оборудование для определения близости может быть недоступно в некоторых транспортных средствах (например, эконом-класса).
[0003] Некоторые транспортные средства включают в себя одну или более камер для получения видео задней части (или передней части) транспортного средства и дисплей в транспортном средстве для отображения получаемого видео в реальном времени. Используя видеопоток реального времени, водитель может непосредственно видеть пространство сзади (или спереди) транспортного средства при движении транспортного средства на парковочное место. Однако один из недостатков таких парковочных систем на основе видео заключается в необходимости дорогостоящего оборудования (например, камеры(камер), дисплея и т.д.) и сложной схемы, элементы которой не доступны в некоторых транспортных средствах и/или не осуществимы в определенных ценовых сегментах.
[0004] Другие существующие парковочные системы включают в себя лазерные лучи, которые установлены в заданных местах на транспортном средстве и проецируются на переднюю или заднюю поверхность, смежную парковочному месту. Положение лазерных лучей на поверхности может указывать расстояние между транспортным средством и поверхностью и может помогать водителю при парковке на парковочное место. Например, в одной системе на заднюю поверхность нанесена вертикальная линия, и выравнивание лазерных лучей на вертикальной линии указывает, что транспортное средство надлежащим образом размещено на парковочном месте. Однако такие системы на основе лазера имеют ряд недостатков. Например, лазерные лучи может быть очень сложно увидеть в условиях яркого солнечного света, и их характеристики могут зависеть от изменений температуры и других внешних факторов. Также внедрение таких систем может быть дорогостоящим и сложным.
[0005] Соответственно все еще имеется необходимость эффективной системы помощи при парковке, которая может помогать водителям при установлении расстояния между транспортным средством и стеной или другим объектом на пути транспортного средства и не требует дорогостоящего оборудования или сложной установки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Изобретение предназначено для решения вышеуказанных проблем путем обеспечения технологий для индикации на окне транспортного средства расстояния между транспортным средством и объектом на пути транспортного средства при выполнении водителем маневров для парковки транспортного средства на парковочное место смежно объекту. Расстояние индицируется относительным положением (1) светового рисунка, проецируемого на объект одним или более световыми приборами транспортного средства, причем световой рисунок виден через переднее и/или заднее окно транспортного средства, и (2) одного или более индикаторов близости транспортного средства, прикрепленных в заданном положении на переднем и/или заднем окне. Заданное положение выбрано так, чтобы световой рисунок был выровнен с индикатором(ами) близости при нахождении транспортного средства на требуемом расстоянии от объекта и/или в пределах парковочного места.
[0007] Например, один вариант выполнения обеспечивает транспортное средство, содержащее концевую часть, обращенную к внешнему объекту, по меньшей мере один световой прибор транспортного средства, расположенный смежно концевой части и проецирующий световой рисунок на объект, окно смежно концевой части, и по меньшей мере один индикатор близости, присоединенный к окну в заданном положении, соответствующем предполагаемому местоположению светового рисунка на объекте при нахождении концевой части на заданном расстоянии от объекта.
[0008] Другой примерный вариант выполнения обеспечивает транспортное средство, содержащее заднюю концевую часть, заднее окно, по меньшей мере один задний световой прибор, выполненный с возможностью проецирования светового рисунка на объект позади задней концевой части, и по меньшей мере один индикатор близости, присоединенный к заднему окну в заданном положении, соответствующем предполагаемому местоположению светового рисунка на объекте при нахождении задней концевой части на заданном расстоянии от объекта.
[0009] Еще один примерный вариант выполнения обеспечивает транспортное средство, содержащее переднюю концевую часть, переднее окно, по меньшей мере один передний световой прибор, выполненный с возможностью проецирования светового рисунка на объект перед передней концевой частью, и по меньшей мере один индикатор близости, присоединенный к переднему окну в заданном положении, соответствующем предполагаемому местоположению светового рисунка на объекте при нахождении передней концевой части на заданном расстоянии от объекта.
[00010] Предлагается транспортное средство, содержащее: концевую часть, обращенную к внешнему объекту; по меньшей мере один световой прибор транспортного средства, расположенный смежно концевой части и проецирующий световой рисунок на объект; окно смежное с концевой частью; и по меньшей мере один индикатор близости, присоединенный к окну в заданном положении, соответствующем предполагаемому местоположению светового рисунка на объекте при нахождении концевой части на заданном расстоянии от объекта. Причем световой рисунок перемещается относительно объекта при движении концевой части транспортного средства к объекту с первого расстояния до заданного расстояния. Причем световой рисунок включает в себя два световых пучка, выполненных с возможностью горизонтального перемещения друг от друга при движении концевой части транспортного средства к объекту с первого расстояния. Причем предполагаемое местоположение светового рисунка включает в себя предполагаемое горизонтальное расстояние между двумя световыми пучками при нахождении концевой части транспортного средства на заданном расстоянии от объекта, и заданное положение по меньшей мере одного индикатора близости включает в себя первое положение и второе положение, разнесенные на предполагаемое горизонтальное расстояние. Причем световой рисунок включает в себя по меньшей мере один световой пучок, выполненный с возможностью перемещения вертикально вниз при движении концевой части транспортного средства к объекту с первого расстояния. Причем предполагаемое местоположение светового рисунка включает в себя предполагаемую вертикальную высоту по меньшей мере одного светового пучка при нахождении концевой части транспортного средства на заданном расстоянии от объекта, и заданное положение по меньшей мере одного индикатора близости вертикально выровнено с предполагаемой вертикальной высотой. Причем концевая часть, обращенная к внешнему объекту, включает в себя по меньшей мере одну из передней концевой части транспортного средства и задней концевой части транспортного средства. Причем по меньшей мере один световой прибор транспортного средства выбран из по меньшей мере одного из передних световых приборов транспортного средства и задних световых приборов транспортного средства, встроенных в транспортное средство. Причем предполагаемое местоположение светового рисунка выравнивается с нитью обогрева транспортного средства. Причем предполагаемое местоположение светового рисунка выравнивается с третьим стоп-сигналом транспортного средства. Причем по меньшей мере один индикатор близости встроен в окно. Причем по меньшей мере один индикатор близости приклеен с возможностью удаления к окну. Причем по меньшей мере один индикатор близости представляет собой наклейку или переводное изображение, приклеенное к окну. Причем световой рисунок виден через окно из салона транспортного средства.
Также предлагается транспортное средство, содержащее: заднюю концевую часть; заднее окно; по меньшей мере один задний световой прибор, выполненный с возможностью проецирования светового рисунка на объект позади задней концевой части; и по меньшей мере один индикатор близости, присоединенный к заднему окну в заданном положении, соответствующем предполагаемому местоположению светового рисунка на объекте при нахождении задней концевой части на заданном расстоянии от объекта. Причем по меньшей мере один задний световой прибор выбран из по меньшей мере одного из задних фонарей, стоп-сигналов и фонарей заднего хода, встроенных в транспортное средство. Причем по меньшей мере один индикатор близости представляет собой наклейку или переводное изображение, приклеенное к заднему окну.
Также предлагается транспортное средство, содержащее: переднюю концевую часть; переднее окно; по меньшей мере один передний световой прибор, выполненный с возможностью проецирования светового рисунка на объект перед передней концевой частью; и по меньшей мере один индикатор близости, присоединенный к переднему окну в заданном положении, соответствующем предполагаемому местоположению светового рисунка на объекте при нахождении передней концевой части на заданном расстоянии от объекта. Причем по меньшей мере один передний световой прибор выбран из по меньшей мере одного из передних фар, противотуманных фар и дневных ходовых огней, встроенных в транспортное средство. Причем по меньшей мере один индикатор близости представляет собой наклейку или переводное изображение, приклеенное к переднему окну.
Следует понимать, что настоящее изобретение определено приложенной формулой изобретения. Описание обобщает аспекты вариантов выполнения и не должно использоваться для ограничения формулы изобретения. Другие осуществления рассматриваются в соответствии с описанными в настоящем документе технологиями, которые будут понятны специалисту в области техники при изучении следующих далее чертежей и подробного описания, и такие осуществления находятся в пределах объема охраны настоящей заявки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00011] Для лучшего понимания изобретения может быть сделана ссылка на варианты выполнения, показанные на следующих далее чертежах. Компоненты на чертежах необязательно выполнены в масштабе, и связанные элементы могут быть опущены, или в некоторых примерах пропорции могут быть преувеличены так, чтобы подчеркнуть и наглядно проиллюстрировать новые описанные в настоящем документе признаки. В дополнение компоненты системы могут быть расположены различным образом, известным в уровне техники. Дополнительно на чертежах одинаковые ссылочные позиции обозначают соответствующие части на всех различных видах.
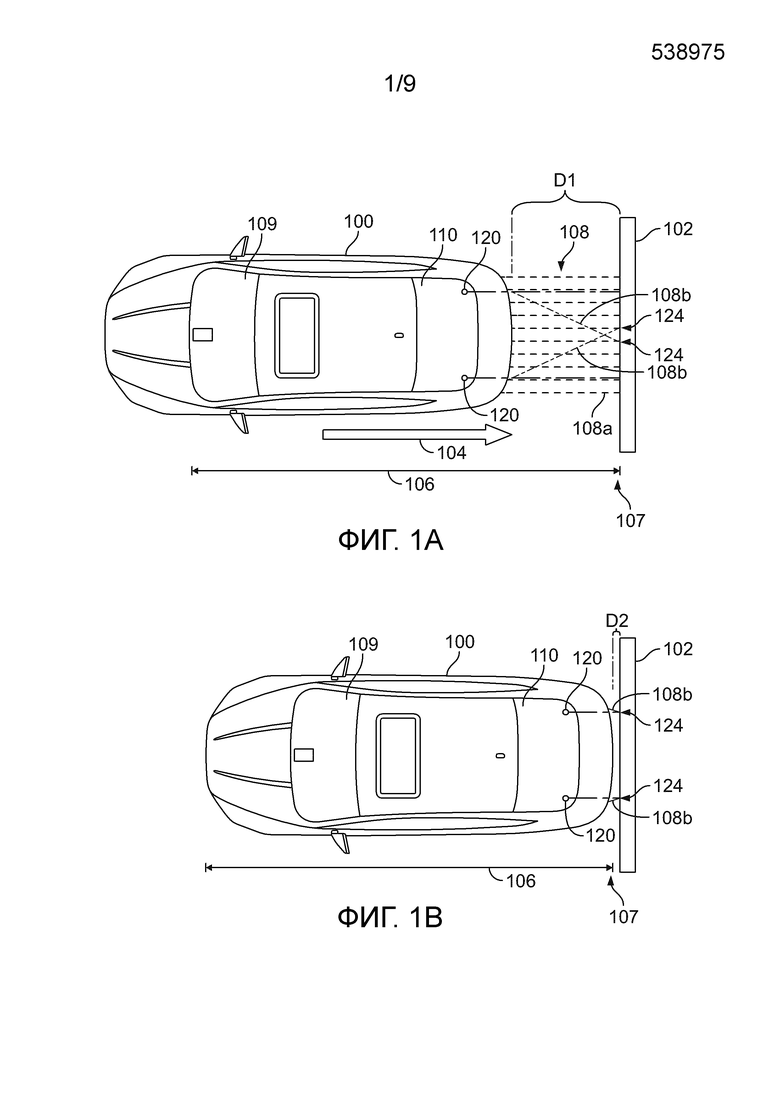
[00012] Фиг. 1A представляет собой вид сверху примерного транспортного средства, расположенного на первом расстоянии от объекта и проецирующего примерный горизонтальный световой рисунок на объект, в соответствии с некоторыми вариантами выполнения.
[00013] Фиг. 1B представляет собой вид сверху транспортного средства на Фиг. 1A, расположенного на втором расстоянии от стены, в соответствии с некоторыми вариантами выполнения.
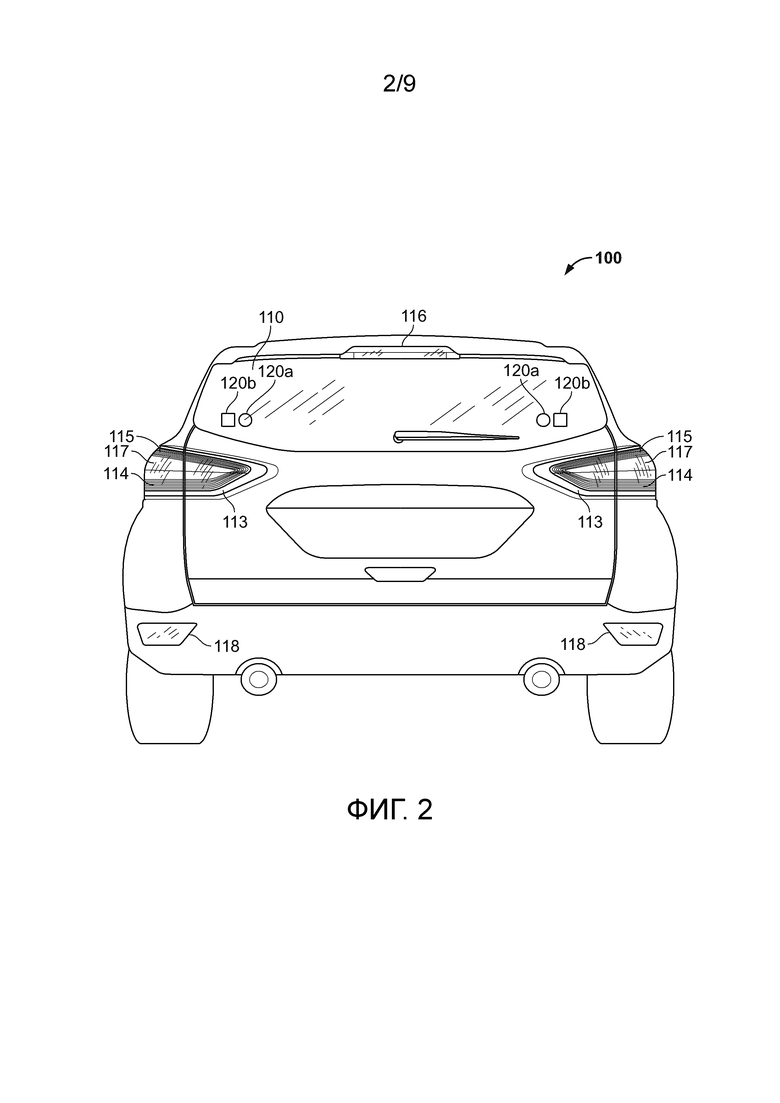
[00014] Фиг. 2 представляет собой вид сзади примерного транспортного средства с множеством задних световых приборов в соответствии с некоторыми вариантами выполнения.
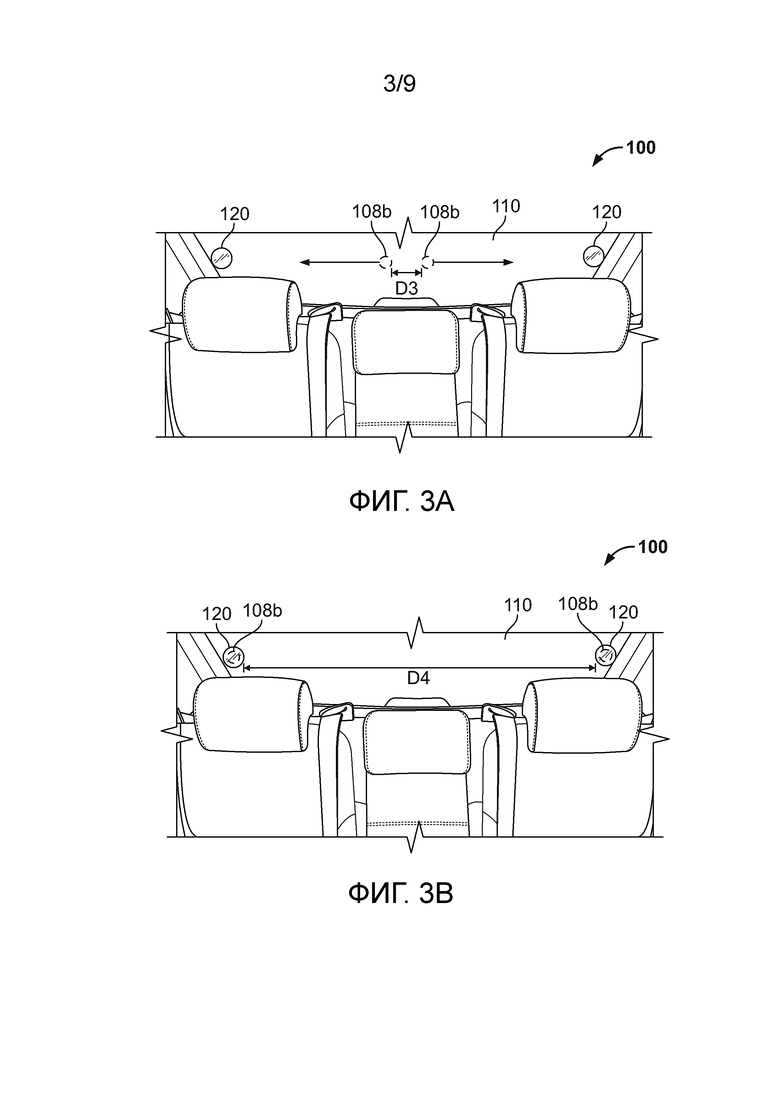
[00015] Фиг. 3А представляет собой вид спереди заднего окна транспортного средства на Фиг. 1A и светового рисунка, видимого через него, в соответствии с некоторыми вариантами выполнения.
[00016] Фиг. 3B представляет собой вид спереди заднего окна транспортного средства на Фиг. 1B и светового рисунка, видимого через него, в соответствии с некоторыми вариантами выполнения.
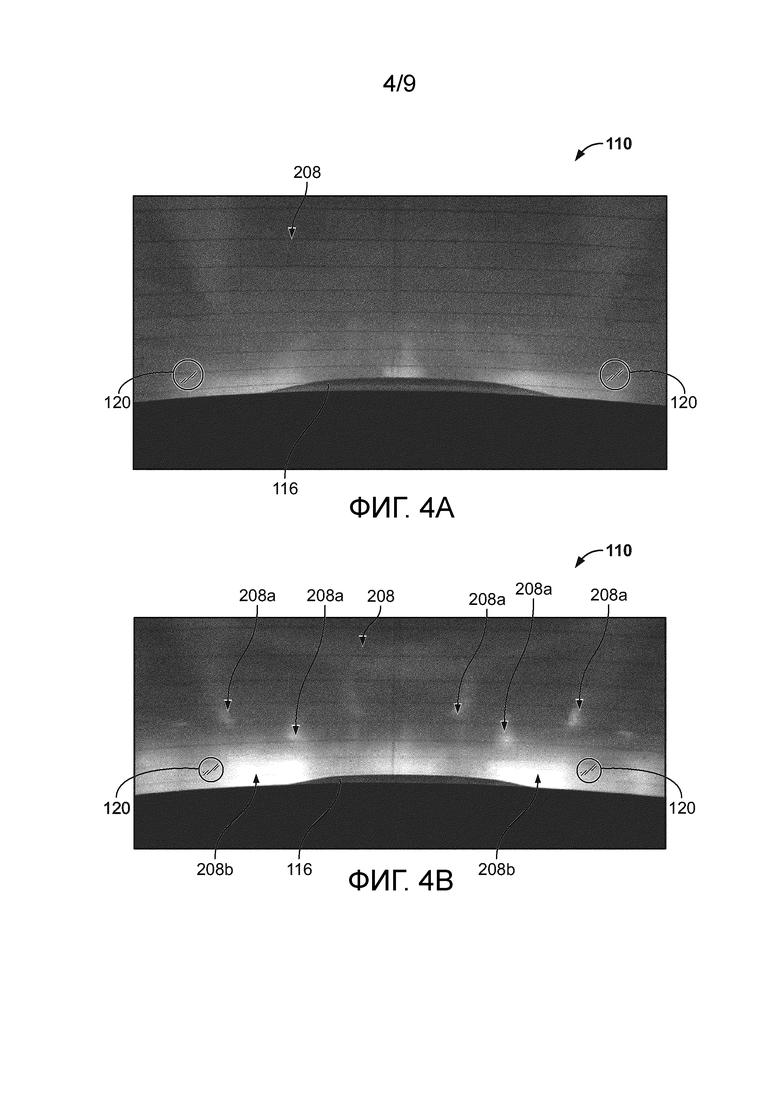
[00017] Фиг. 4A представляет собой растровое изображение другого примерного светового рисунка, видимого через заднее окно транспортного средства на Фиг. 1A, в соответствии с некоторыми вариантами выполнения.
[00018] Фиг. 4B представляет собой растровое изображение другого примерного светового рисунка, видимого через заднее окно транспортного средства на Фиг. 1B, в соответствии с некоторыми вариантами выполнения.
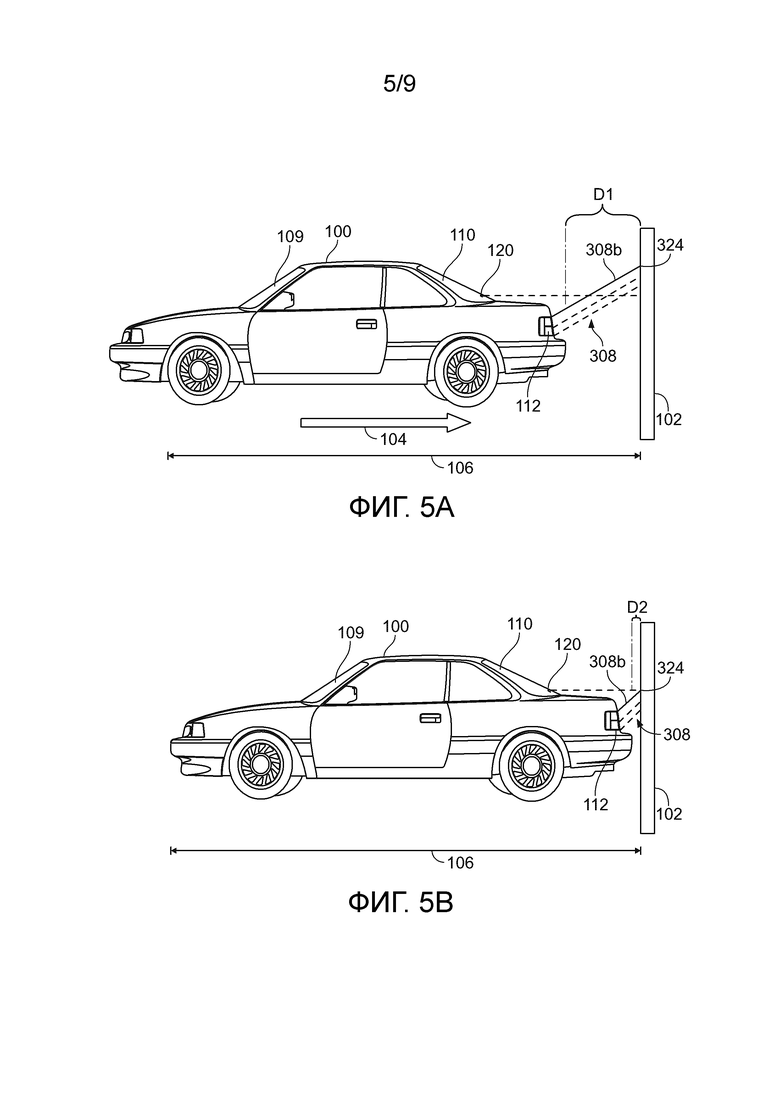
[00019] Фиг. 5A представляет собой вид сбоку примерного транспортного средства, расположенного на первом расстоянии от объекта и проецирующего примерный вертикальный световой рисунок на объект, в соответствии с некоторыми вариантами выполнения.
[00020] Фиг. 5B представляет собой вид сбоку транспортного средства на Фиг. 5A на втором расстоянии от объекта в соответствии с некоторыми вариантами выполнения.
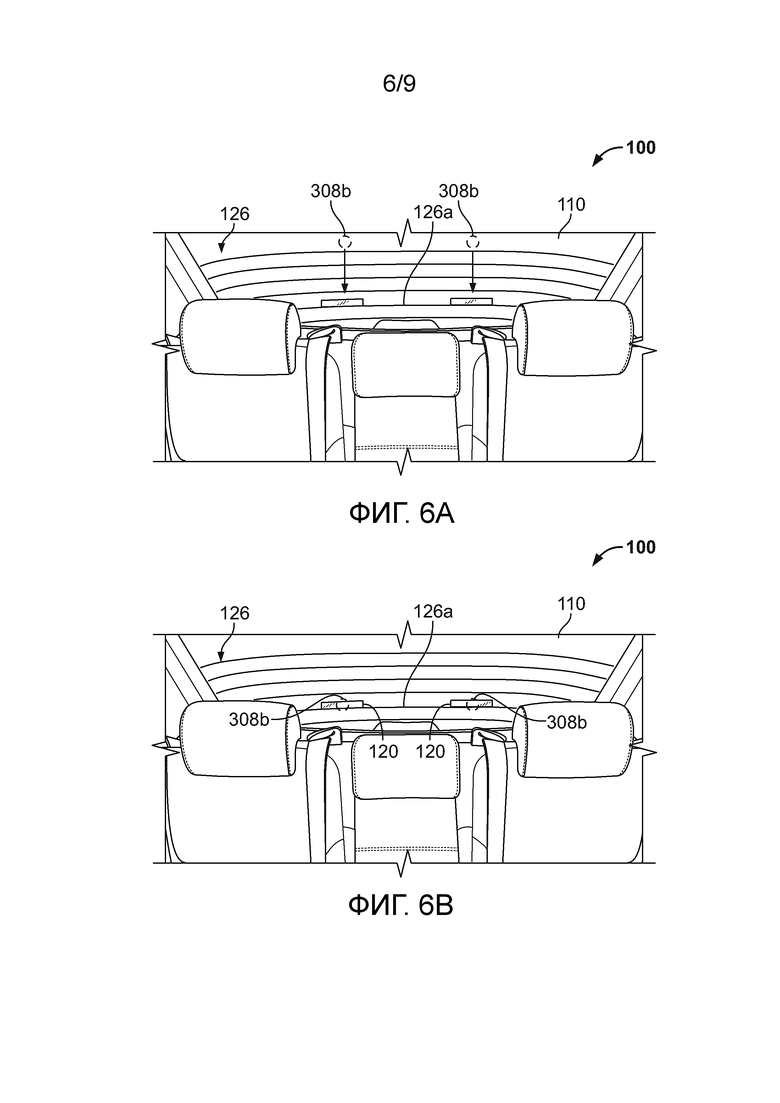
[00021] Фиг. 6А представляет собой вид спереди заднего окна транспортного средства на Фиг. 5A и светового рисунка, видимого через него, в соответствии с некоторыми вариантами выполнения.
[00022] Фиг. 6B представляет собой вид спереди заднего окна транспортного средства на Фиг. 5B и светового рисунка, видимого через него, в соответствии с некоторыми вариантами выполнения.
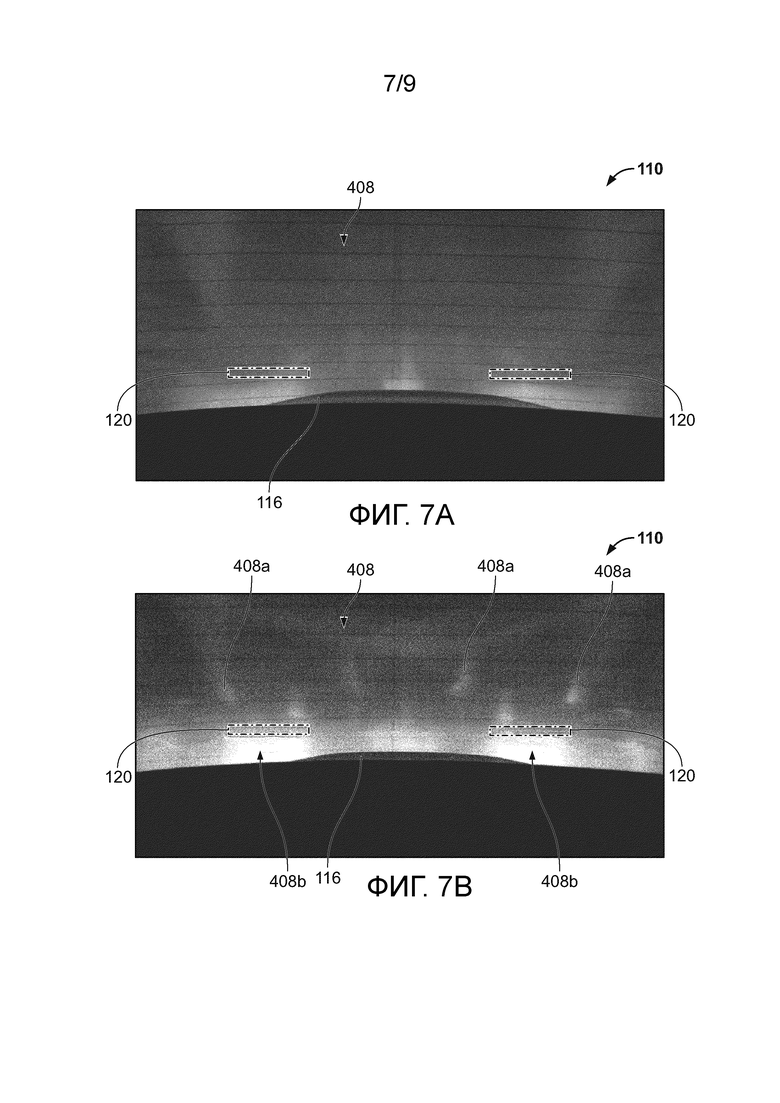
[00023] Фиг. 7A представляет собой растровое изображение другого примерного светового рисунка, видимого через заднее окно транспортного средства на Фиг. 5A, в соответствии с некоторыми вариантами выполнения.
[00024] Фиг. 7B представляет собой растровое изображение другого примерного светового рисунка, видимого через заднее окно транспортного средства на Фиг. 5B, в соответствии с некоторыми вариантами выполнения.
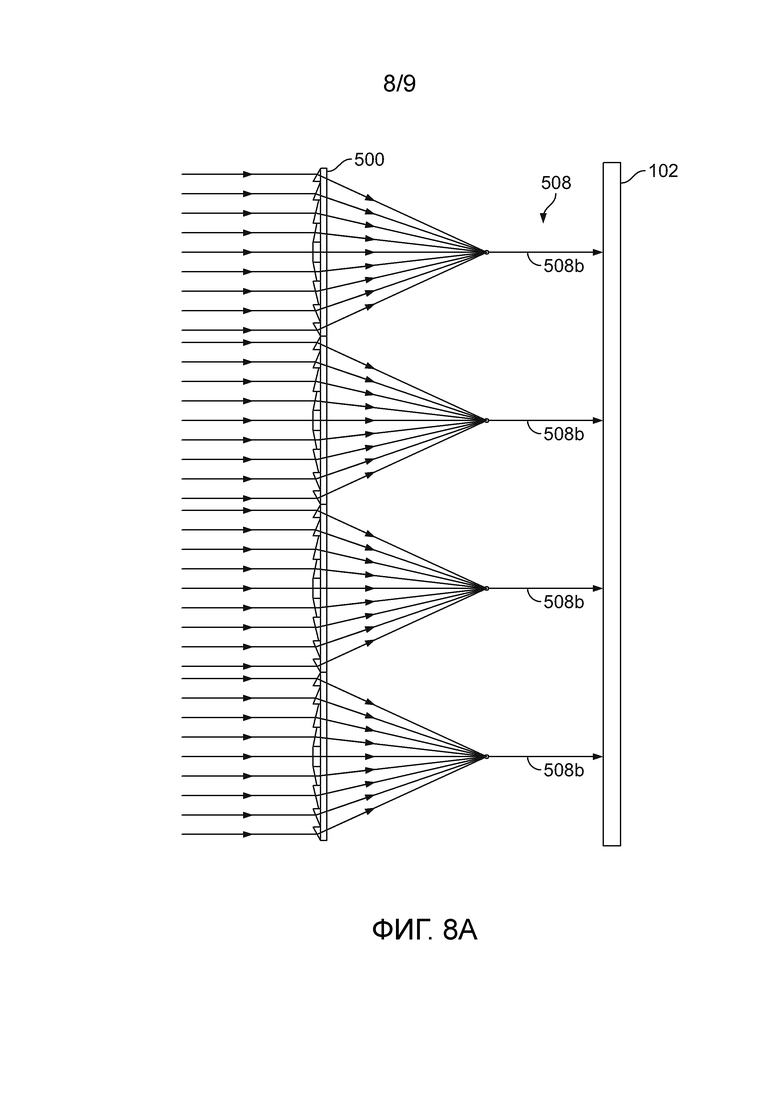
[00025] Фиг. 8A представляет собой графическое изображение света, проходящего через примерную линзу в примерном световом приборе транспортного средства, в соответствии с некоторыми вариантами выполнения.
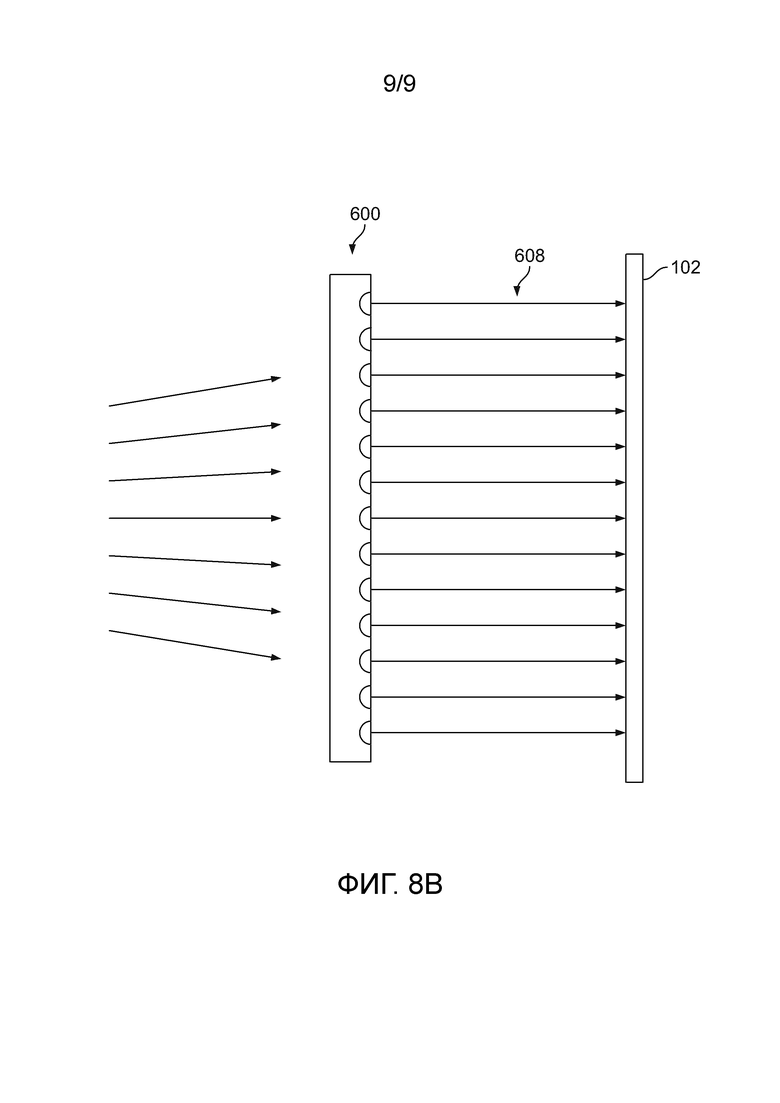
[00026] Фиг. 8B представляет собой графическое изображение света, проходящего через другую примерную линзу в примерном световом приборе транспортного средства, в соответствии с некоторыми вариантами выполнения.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
[00027] Хотя изобретение может быть выполнено в различных формах, на чертежах показаны и далее будут описаны некоторые примерные и неограничивающие варианты выполнения с пониманием, что настоящее раскрытие следует рассматривать как иллюстративный пример изобретения, а не как ограничение изобретения конкретными проиллюстрированными вариантами выполнения.
[00028] В настоящей заявке использование разделительных союзов предназначено для включения соединительных союзов. Использование определенных или неопределенных артиклей не предназначено для указания количества элементов. В частности, ссылка на «объект» предназначена для обозначения одного из возможного множества таких объектов.
[00029] Фиг. 1A и 1B иллюстрируют примерное транспортное средство 100 и объект 102, расположенный на пути 104 движения транспортного средства 100. В вариантах выполнения транспортное средство 100 движется к объекту 102 по пути 104 движения при выполнении водителем маневров для парковки транспортного средства 100 на парковочное место 106. Как показано на Фиг. 1A, первоначально транспортное средство 100 может быть расположено по меньшей мере частично за пределами парковочного места 106 на первом горизонтальном расстоянии D1 от объекта 102. Расстояние между транспортным средством 100 и объектом 102 может постепенно сокращаться по мере движения транспортного средство 100 на парковочное место 106 до тех пор, пока транспортное средство 100 не будет полностью расположено на парковочном месте 106 на заданном горизонтальном расстоянии D2 от объекта 102, как показано на Фиг. 1B.
[00030] Хотя на Фиг. 1A и 1B транспортное средство 100 показано в виде транспортного средства с кузовом типа седан, следует понимать, что транспортное средство 100 может относиться к любому типу моторного транспортного средства, включая, но не ограничиваясь, транспортное средство типа внедорожник (SUV), минивэн, фургон, грузовик, грузопассажирское транспортное средство и т.д. Также в проиллюстрированных вариантах выполнения транспортное средство 100 показано движущимся в обратном направлении или в направлении назад к объекту 102 и, таким образом, горизонтальные расстояния D1 и D2 измерены от задней концевой части транспортного средства 100 до объекта 102. В других вариантах выполнения транспортное средство 100 может двигаться в направлении вперед к объекту 102 так, что горизонтальные расстояния D1 и D2 измерены от передней концевой части транспортного средства 100 до объекта 102.
[0031] В некоторых случаях заданное расстояние D2 может быть выбрано в соответствии со стандартизированным параметром, таким как, например, фиксированное число дюймов от объекта 102 (например, два дюйма, три дюйма и т.д.). В других случаях заданное расстояние D2 выбрано на основе предпочтений водителя, например, на основе того, насколько близко к объекту 102 водитель хотел бы припарковать транспортное средство 100. Например, некоторые водители могут оставлять пространство для ходьбы между транспортным средством 100 и объектом 102 и/или достаточное пространство для доступа к багажнику или капоту транспортного средства 100, находящегося на парковочном месте 106. Другие водители могут размещать транспортное средство 100 максимально близко к объекту 102. Некоторые водители могут размещать транспортное средство 100 максимально далеко от объекта 102, но в пределах парковочного места 106.
[00032] Объект 102 может представлять собой любую поверхность или конструкцию, которая определяет границу дальнего конца 107 парковочного места 106. В некоторых случаях объект 102 представляет собой стену, половину стены, часть стены, колонну, забор или любой другой барьер, расположенный смежно дальнему концу 107 парковочного места 106. Например, объект 102 может быть стеной парковочной конструкции или гаража. В других случаях объект 102 представляет собой другое транспортное средство, расположенное смежно дальнему концу 107 парковочного места 106, например, на автомобильной стоянке. В некоторых случаях объект 102 включает в себя последовательность объектов, таких как, например, ряд столбиков, две или более колонн или другой набор конструкций, расположенных смежно дальнему концу 107 парковочного места 106.
[00033] В вариантах выполнения транспортное средство 100 включает в себя множество внешних световых приборов транспортного средства (не показаны), которые выполнены с возможностью проецирования светового рисунка 108 на объект 102. Водитель может видеть отражение светового рисунка 108 на объекте 102 через окно транспортного средства, обращенное к объекту 102. Например, как показано на Фиг. 1A и 1B, транспортное средство 100 включает в себя по меньшей мере два окна транспортного средства: заднее окно или ветровое стекло 109 на задней части транспортного средства 100 и переднее окно или ветровое стекло 110 на передней части транспортного средства 100. Если транспортное средство 100 движется назад, как показано на Фиг. 1A, отражение светового рисунка 108 может быть видно через заднее окно 110, а если транспортное средство 100 движется вперед, отражение светового рисунка 108 может быть видно через переднее окно 109. При движении транспортного средства 100 назад к объекту 102 световой рисунок 108 может быть сгенерирован путем сочетания одного или более задних световых приборов 112 транспортного средства, таких как, например, задние фонари 113, фонари 114 заднего хода, стоп-сигналы 115 (также называемые «тормозные фонари»), третий стоп-сигнал 116 (также называемый «дополнительный центральный стоп-сигнал (CHMSL)»), указатели 117 поворота и задние габаритные огни 118, которые показаны на примерном транспортном средстве, изображенном на Фиг. 2. При движении транспортного средства 100 вперед к объекту 102 световой рисунок 108 может быть сгенерирован путем сочетания одного или более передних световых приборов транспортного средства (не показаны), таких как, например, передние фары, противотуманные фары, дневные ходовые огни, стояночные фонари, указатели поворота, передние габаритные огни и/или огни зеркала бокового вида.
[00034] В проиллюстрированном варианте выполнения световой рисунок 108 проецируется в по существу горизонтальном направлении относительно земли и включает в себя несколько световых полос 108a, которые направлены к объекту 102 в по существу перпендикулярном направлении, и по меньшей мере два световых пучка 108b, которые проецируются по направлению друг к другу под заданным углом схождения так, что световые пучки 108b пересекаются между транспортным средством 100 и объектом 102, как показано на Фиг. 1A. Для генерации светового рисунка 108 по меньшей мере одна пара задних световых приборов 112 транспортного средства может быть выполнена с возможностью проецирования очерченных световых пучков 108b под заданным углом схождения, например, путем настройки оптики световых приборов. В одном примерном варианте выполнения задние фонари 113 специально выполнены с возможностью проецирования очерченных световых пучков 108b, как показано на Фиг. 1A. В других случаях пара передних световых приборов транспортного средства, таких как, например, передние фары транспортного средства 100, может быть специально выполнена с возможностью проецирования направленных световых пучков к объекту 102 при движении транспортного средства 100 вперед на парковочное место 106. Хотя в целях ясности световые полосы 108a не показаны на Фиг. 1B, следует понимать, что световые полосы 108a также могут быть видны сзади транспортного средства 100, находящегося на расстоянии D2.
[00035] Точный световой рисунок 108, отражаемый на объекте 102, может изменяться в зависимости от ряда факторов, включая в себя тип и/или цвет световых приборов транспортного средства, освещающих объект 102 (например, передних световых приборов или задних световых приборов, красных световых приборов или белых световых приборов и т.д.), модели, типа и/или размера транспортного средства 100 (например, седан или фургон) и местоположения световых приборов транспортного средства на транспортном средстве 100 (например, выравнивание с крышей или с верхней частью капота). В некоторых случаях внешние световые приборы транспортного средства могут быть специально выполнены с возможностью проецирования заданного светового рисунка (например, последовательности вертикальных световых полос или другого изображения) на объект 102, например, путем настройки оптики световых приборов с использованием дифракционной решетки, фильтров и/или других подобных технологий управления светом, проецируемым от световых приборов транспортного средства.
[00036] В вариантах выполнения световой рисунок 108, отражаемый на объекте 102 и видимый через окна 109, 110 транспортного средства, может меняться при уменьшении расстояния между транспортным средством 100 и объектом 102 за счет проецирования более коротких и/или более интенсивных световых полос 108a и световых пучков 108b на объект 102. Например, как показано на Фиг. 1B, когда транспортное средство 100 расположено на расстоянии D2, более короткий участок световых пучков 108b проецируется на объект 102 по сравнению с тем, когда транспортное средство 100 расположено на расстоянии D1 на Фиг. 1A. В вариантах выполнения эта обратная зависимость между световым рисунком 108 и расстояниями D1 и D2 может быть использована для обеспечения указания водителю близости между транспортным средством 100 и объектом 102. В частности, определенные маркеры в световом рисунке 108, который отражен на объекте 102 и виден через окно 109, 110 транспортного средства, могут указывать, когда транспортное средство достигло расстояния D2. Соответственно размещение одного или более индикаторов 120 близости на окне 109, 110 транспортного средства в предполагаемых или приблизительных местоположениях этих маркеров обеспечивает водителю визуальный инструмент или опорную точку для определения, когда транспортное средство 100 достигло требуемого расстояния D2 от объекта 102.
[00037] Например, Фиг. 3А и 3B иллюстрируют одну конфигурацию для размещения индикаторов 120 близости на заднем окне 110 на основе горизонтального изменения световых пучков 108b при движении транспортного средства 100 к объекту 102 в соответствии с вариантами выполнения. Фиг. 3А соответствует Фиг. 1A, изображая световые пучки 108b, отражаемые на объекте 102, которые видны через заднее окно 11 при нахождении транспортного средства 100 на расстоянии D1 от объекта 102. Подобным образом Фиг. 3B соответствует Фиг. 1B, изображая световые пучки 108b, отражаемые на объекте 102, которые видны через заднее окно 110 при нахождении транспортного средства 100 на расстоянии D2 от объекта 102. Световые полосы 108a не показаны на Фиг. 3А и 3B для ясности.
[00038] Как показано, при движении транспортного средства 100 ближе к объекту 102 кажется, что световые пучки 108b, отражаемые на объекте 102, горизонтально перемещаются в направлении друг от друга поперек заднего окна 110, зеркально отображая изменение местоположений 124, в которых световые пучки 108b пересекают объект 102. В частности, когда транспортное средство 100 находится на расстояние D1, кажется, что световые пучки 108b разнесены на небольшое горизонтальное расстояние D3, а когда транспортное средство 100 находится на расстоянии D2, кажется, что световые пучки 108b разнесены на большее горизонтальное расстояние D4. Таким образом, имеется обратная зависимость между расстояниями D1, D2 и расстояниями D3, D4. Индикаторы 120 близости присоединены или прикреплены к заднему окну 110 в заданных местоположениях, которые соответствуют предполагаемым положениям световых пучков 108b при нахождении транспортного средства 100 на расстоянии D2 от объекта 102. Например, заданные местоположения могут быть разнесены друг от друга на расстояние D4, как показано. Как проиллюстрировано на Фиг. 1B, заданные местоположения индикаторов 120 близости также могут соответствовать местоположению 124, в котором световые пучки 108b пересекают объект 102.
[00039] Используя индикаторы 120 близости, водитель транспортного средства 100 может определять, находится ли транспортное средство 100 на расстоянии D2 от объекта 102 и, следовательно, в пределах парковочного места 106. Например, когда световые пучки 108b, видимые через заднее окно 110, находятся близко к центру и на расстоянии от индикаторов 120 близости, например, как показано на Фиг. 3A, это указывает водителю, что транспортное средство 100 все еще находится достаточно далеко (например, на расстоянии D1) от объекта 102. По мере приближения транспортного средства 100 к объекту 102 каждый из световых пучков 108b, видимых через заднее окно 110, может перемещаться ближе к соответственному одному из индикаторов 120 близости. Когда световые пучки 108b, видимые через заднее окно 110, по существу выровнены с индикаторами 120 близости, как показано на Фиг. 3B, это информирует водителя о том, что транспортное средство 100 достигло расстояния D2 от объекта 102, и, следовательно, водитель должен остановить движение транспортного средства 100. Хотя проиллюстрированные варианты выполнения и связанные обсуждения показывают индикаторы 120 близости, прикрепленные к заднему окну 110, следует понимать, что такие же технологии могут быть применены к размещению индикаторов 120 близости на переднем ветровом стекле 109 транспортного средства 100 для направления водителя при движении транспортного средства 100 вперед к объекту 102.
[00040] Согласно вариантам выполнения индикаторы 120 близости могут иметь любую форму, такую как, наклейка, переводное изображение, метка, ярлычок или другой знак, который может быть выборочно нанесен на окно 109, 110 транспортного средства в заданных местах. Индикаторы 120 близости могут быть приклеены к окну 109, 110 транспортного средства с использованием любой подходящей технологии, включая, например, адгезив, удаляемую клейкую ленту и статическое прилипание. Дополнительно индикаторы 120 близости могут быть выполнены из любого подходящего материала, включая, например, винил, пластик и т.д. Как показано на Фиг. 3A и 3B, индикаторы 120 близости могут быть по существу прозрачными или по меньшей мере светопропускающими так, чтобы световые пучки 108b были по-прежнему видны сквозь индикаторы 120 близости при перекрытии индикаторами 120 близости. В предпочтительном варианте выполнения индикаторы 120 близости представляют собой удаляемые автомобильные наклейки, которые при необходимости могут быть перемещены владельцем транспортного средства, например, для соответствия изменению парковочного места в случае переезда владельца транспортного средства в новое здание или на новое рабочее место.
[00041] Альтернативно индикаторы 120 близости могут быть напечатаны, вытравлены, нарисованы или иным образом нанесены на окно 109, 110 транспортного средства. Также в некоторых случаях для определения выравнивания со световыми пучками 108b может быть достаточно только одного индикатора 120 близости. Дополнительно, хотя показаны индикаторы 120 близости, имеющие по существу круглую форму, в других вариантах выполнения индикаторы 120 близости могут иметь любую другую форму и/или размер, например, квадратную форму, как показано на Фиг. 2, или прямоугольную форму, как показано на Фиг. 6A и 6B. В некоторых случаях индикаторы 120 близости могут быть в форме одной или более линий, которые вертикально или горизонтально расположены на окне 109, 110 транспортного средства, в зависимости от характеристик светового рисунка 108.
[00042] В некоторых вариантах выполнения индикаторы 120 близости заранее нанесены на транспортное средство 100, например, на этапе производства или после этапа производства. В таких случаях заданные местоположения индикаторов 120 близости и соответствующее расстояние D4 между ними могут быть выбраны на основе заданного расстояния D2. Например, на основе конкретного светового рисунка 108, генерируемого транспортным средством 100, производитель может определить, что при нахождении транспортного средства 100 на расстоянии D2, составляющем 2 дюйма, от объекта 102, индикаторы 120 близости должны быть разнесены друг от друга на расстояние D4, составляющее 20 сантиметров. В других вариантах выполнения индикаторы 120 близости могут быть обеспечены в качестве дополнительного послепродажного продукта, который владелец транспортного средства самостоятельно устанавливает после определения требуемого расстояния D2 между транспортным средством 100 и объектом 102 и измерения соответствующего расстояния D4 между световыми пучками 108b на окне 109, 110 транспортного средства. В любом случае индикаторы 120 близости предпочтительно расположены на окне 109, 110 транспортного средства на высоте, которая видна водителю, но не заслоняет поля обзора водителя, и отцентрированы относительно третьего стоп-сигнала 116 или другой центральной точки.
[00043] В некоторых случаях владелец транспортного средства может установить более одного комплекта индикаторов 120 близости для помощи в направлении водителя на разные парковочные места. Например, для рабочего парковочного места может потребоваться другое расстояние D2, чем для домашнего парковочного места. В таких случаях индикаторы 120 близости могут быть выполнены во множестве различных цветов или форм так, чтобы владелец транспортного средства мог различать несколько комплектов индикаторов 120 близости на одном окне 109, 110 транспортного средства. Например, Фиг. 2 показывает первый комплект индикаторов 120a близости круглой формы в первых заданных местоположения, выполненный для первого парковочного места, и второй комплект индикаторов 120b близости квадратной формы во вторых заданных местоположениях, выполненный для второго парковочного места. Как показано, вторые индикаторы 120b близости находятся дальше друг от друга, чем первые индикаторы 120a близости, так как, например, для второго парковочного места может требоваться большее расстояние D4 или меньшее расстояние D2, чем для первого парковочного места.
[00044] Фиг. 4A и 4B иллюстрируют другую примерную конфигурацию для размещения индикаторов 120 близости на заднем окне 110 на основе изменений светового рисунка 208, отражаемого на объекте 102 и видимого через заднее окно 110, в соответствии с вариантами выполнения. Как показано на примерных растровых изображениях на Фиг. 4A и 4B, световой рисунок 208, отражаемый на объекте 102, включает в себя сочетание теней и световых полос, которое преобразуется или изменяется (например, увеличивается резкость) при изменении расстояния между транспортным средством 100 и объектом 102 (например, уменьшении). В частности, Фиг. 4A показывает световой рисунок 208, который виден через заднее окно 110 при нахождении транспортного средства 100 на расстоянии D1 от объекта 102, а Фиг. 4B показывает световой рисунок 208, который виден через заднее окно 110 при нахождении транспортного средства 100 на расстоянии D2 от объекта 102. Световой рисунок 208 может состоять из неразличимых световых полос при нахождении транспортного средства 100 на расстоянии D1, как показано на Фиг. 4A. При движении транспортного средства 100 ближе к объекту 102 световой рисунок 208 преобразуется так, что эти световые полосы становятся более резкими или более очерченными. К тому времени, когда транспортное средство 100 достигает расстояния D2 от объекта 102, световой рисунок 208 состоит из множества более различимых световых полос 208a и по меньшей мере двух по существу очерченных световых пучков 208b, которые видны через заднее окно 110 в двух местоположениях, выровненных по ширине третьего стоп-сигнала 116, как показано на Фиг. 4B.
[00045] Очерченные световые пучки 208b, которые видны через заднее окно 110, могут помогать при размещении индикаторов 120 близости на заднем окне 110. Например, как показано на Фиг. 4B, индикаторы 120 близости могут быть размещены смежно внешним границам световых пучков 208b и/или на заданных расстояниях от каждой стороны третьего стоп-сигнала 116. Когда внешние границы световых пучков 108b достигают индикаторов 120 близости, как показано на Фиг. 4B, это указывает водителю, что транспортное средство 100 находится на расстоянии D2 от объекта 102. В некоторых случаях индикаторы 120 близости могут представлять собой вертикальные линии, а не круги, для более четкой индикации выравнивания внешних границ световых пучков 208b с индикаторами 120 близости.
[00046] Согласно вариантам выполнения очерченные световые пучки 208b создаются заданной парой задних световых приборов 112, при этом световые полосы 108a и остальные световые элементы в световом рисунке 108 создаются остальными задними световыми приборами 112. Например, в проиллюстрированном варианте выполнения световые пучки 208b испускаются фонарями 114 заднего хода, которые создают белый свет, который можно легче отличить от других световых элементов в световом рисунке 208. В других случаях заданная пара задних световых приборов 112 выполнена с возможностью испускать более резкий или более очерченный световой пучок, например, как показано световыми пучками 108b на Фиг. 3A и 3B, или иным образом более четко выделять световые пучки 208b среди других световых элементов в световом рисунке 208, например, путем настройки оптики световых приборов.
[00047] В предыдущих примерах для определения близости транспортного средства к объекту используется технология горизонтального считывания путем отслеживания горизонтального изменения светового рисунка 108, проецируемого на объект 102 и видимого через окно 109, 110 транспортного средства. В таких вариантах выполнения световые приборы транспортного средства выполнены с возможностью проецирования по меньшей мере участка светового рисунка 108 в по существу горизонтальном направлении (например, параллельно земле), таким образом, позволяя использование технологии горизонтального считывания. В других вариантах выполнения световые приборы транспортного средства могут быть выполнены с возможностью проецирования по меньшей мере участка светового рисунка под заданным углом или в частично вертикальном направлении относительно земли. В таких случаях для установления близости транспортного средства к объекту и обеспечения индикации указанной близости водителю может быть использована технология вертикального считывания.
[00048] Например, Фиг. 5A и 5B иллюстрируют вид сбоку транспортного средства 100 с задними световыми приборами 112 транспортного средства, выполненными с возможностью проецирования светового рисунка 308 под углом на объект 102 позади транспортного средства 100, в соответствии с вариантами выполнения. Как показано, световой рисунок 308 проецируется вверх над или за пределами высоты багажника транспортного средства 100 и на линии прямой видимости через заднее окно 110. Световой рисунок 308 включает в себя по меньшей мере одну пару очерченных световых пучков 308b, которые могут быть спроецированы от заданной пары задних световых приборов 112 транспортного средства, таких как, например, задние фонари 113. В некоторых случаях заданная пара световых приборов 112 транспортного средства может быть выполнена с возможностью проецирования светового рисунка 308 под заданным углом, который является достаточным для обеспечения видимости отражения световых пучков 308b на объекте 102 через заднее окно 110 (или переднее окно 109, если транспортное средство 100 движется вперед к объекту 102). Как показано, световые пучки 308b пересекают объект 102 в местоположении 324. При движении транспортного средства 100 ближе объекту 102 (например, с расстояния D1, показанного на Фиг. 5A, до расстояния D2, показанного на Фиг. 5B), местоположение 324 перемещается вертикально вниз по объекту 102. В вариантах выполнения один или более индикаторов 120 близости могут быть размещены на заднем окне 110 в заданных положениях, которые соответствуют местоположению 324 световых пучков 308b при нахождении транспортного средства 100 на расстоянии D2, как показано на Фиг. 5B.
[00049] Фиг. 6A и 6B иллюстрируют одну примерную конфигурацию для размещения индикаторов 120 близости на заднем окне 110 на основе вертикального изменения световых пучков 308b при движении транспортного средства 100 к объекту 102 в соответствии с вариантами выполнения. Фиг. 6А соответствует Фиг. 5A, изображая световые пучки 308b, отражаемые на объекте 102, которые видны через заднее окно 110 при нахождении транспортного средства 100 на расстоянии D1 от объекта 102. Подобным образом Фиг. 6B соответствует Фиг. 5B, изображая световые пучки 308b, отражаемые на объекте 102, которые видны через заднее окно 110 при нахождении транспортного средства 100 на расстоянии D2 от объекта 102.
[00050] Как показано, при движении транспортного средства 100 ближе к объекту 102, кажется, что световые пучки 308b, отражаемые на объекте 102, перемещаются вертикально вниз от верхней части заднего окна 110 к его нижней части, зеркально отображая изменение местоположения 324, в котором световые пучки 308b пересекают объект 102. Соответственно индикаторы 120 близости прикреплены к заднему окну 110 в заданных местоположениях вблизи нижней части заднего окна 110, которые соответствуют предполагаемой высоте или положению световых пучков 308b при достижении транспортным средством 100 расстояния D2, как показано на Фиг. 6B. При использовании, когда световые пучки 308b находятся близко к верхней части заднего окна 110, как показано на Фиг. 6A, это указывает водителю транспортного средства 100, что расстояние между транспортным средством 100 и объектом 102 все еще является достаточно большим (например, расстояние D1). Как только высота световых пучков 308b выравнивается с индикаторами 120 близости, это сигнализирует водителю о необходимости остановить движение транспортного средства 100, поскольку требуемое расстояние D2 достигнуто.
[00051] В некоторых случаях заднее окно 120 включает в себя множество нитей 126 обогрева, которые могут быть использованы в качестве направляющих для размещения индикаторов 120 близости. Например, как показано на Фиг. 6B, когда транспортное средство 100 находится на расстоянии D2 от объекта 102, световые пучки 308b могут выравниваться со второй снизу нитью 126a обогрева заднего окна 120. Соответственно индикаторы 120 близости могут быть размещены смежно нити 126a обогрева. В некоторых случаях заднее окно 110 может включать в себя только один индикатор 120 близости, который образован в виде линии и размещен параллельно и/или смежно второй нити 126a обогрева или на другой высоте, соответствующей предполагаемому вертикальному положению световых пучков 308b при нахождении транспортного средства 100 на расстоянии D2 от объекта 102.
[00052] Фиг. 7A и 7B иллюстрируют другую примерную конфигурацию для размещения индикаторов 120 близости на заднем окне 110 на основе изменений светового рисунка 408, отражаемого на объекте 102 и видимого через заднее окно 110, в соответствии с вариантами выполнения. Как показано на примерных растровых изображениях на Фиг. 7A и 7B, световой рисунок 408, отражаемый на объекте 102, включает в себя сочетание теней и световых полос, которое преобразуется или изменяется (например, увеличивается резкость) при изменении расстояния между транспортным средством 100 и объектом 102 (например, уменьшении). В частности, Фиг. 7A показывает световой рисунок 408, который виден через заднее окно 110 при нахождении транспортного средства 100 на расстоянии D1 от объекта 102, а Фиг. 7B показывает световой рисунок 408, который виден через заднее окно 110 при нахождении транспортного средства 100 на расстоянии D2 от объекта 102. Световой рисунок 408 может состоять из неразличимых световых полос при нахождении транспортного средства 100 на расстоянии D1, как показано на Фиг. 7A. При движении транспортного средства 100 ближе к объекту 102 световой рисунок 408 преобразуется так, что эти световые полосы становятся более резкими или более очерченными. К тому времени, когда транспортное средство 100 достигает расстояния D2 от объекта 102, световой рисунок 408 состоит из множества различимых световых полос 408a и по меньшей мере двух по существу очерченных световых пучков 408b, которые видны через заднее окно 110 в двух местоположениях, выровненных по ширине третьего стоп-сигнала 116, как показано на Фиг. 7B.
[00053] Очерченные световые пучки 408b, которые видны через заднее окно 110, могут помогать при размещении индикаторов 120 близости на заднем окне 110. Например, как показано на Фиг. 7B, индикаторы 120 близости могут быть размещены смежно предполагаемой высоте верхних границ световых пучков 408b и/или смежно одной из нитей 126 обогрева, которые предназначены для выравнивания с верхними границами световых пучков 408b. Когда верхние границы световых пучков 408b достигают индикаторов 120 близости, как показано на Фиг. 7B, это указывает водителю, что транспортное средство 100 находится на расстоянии D2 от объекта 102. В некоторых случаях индикаторы 120 близости могут представлять собой вертикальные линии, а не прямоугольники, для более четкой индикации выравнивания верхних границ световых пучков 408b с индикаторами 120 близости.
[00054] Согласно вариантам выполнения очерченные световые пучки 408b создаются заданной парой задних световых приборов 112, при этом световые полосы 408a и остальные световые элементы в световом рисунке 408 создаются остальными задними световыми приборами 112. Например, в проиллюстрированном варианте выполнения световые пучки 408b испускаются фонарями 114 заднего хода, которые создают белый свет, который можно легче отличить от других световых элементов в световом рисунке 408. В других случаях заданная пара задних световых приборов 112 выполнена с возможностью испускать более резкий или более очерченный световой пучок, например, как показано световыми пучками 308b на Фиг. 6A и 6B, или иным образом более четко выделять световые пучки 408b среди других световых элементов в световом рисунке 408, например, путем настройки оптики световых приборов.
[00055] Фиг. 8A и 8B иллюстрируют примерную линзовую оптику, которая может быть использована для управления распространением света в световых приборах транспортного средства, описанных в настоящем документе, и таким образом, фокусировкой световых полос, проецируемых на объект 102. В некоторых вариантах выполнения может быть осуществлена настройка световой оптики для создания более заметного светового рисунка или очерченного «указывающего близость светового пятна», которое может быть легко выровнено с индикаторами 120 близости, прикрепленными к заднему окну 120, например, как показано световыми пучками 108b на Фиг. 3А и 3B и световыми пучками 308b на Фиг. 6A и 6B. Фиг. 8A изображает вид в плане примерной матрицы линз 500 Френеля, которая может быть встроена в третий стоп-сигнал 116 и выполнена с возможностью проецирования очерченного горизонтального светового рисунка 508 на объекте 102 путем фокусировки световых полос в ряд из четырех световых пучков 508b. Фиг. 8B изображает вид в плане примерной рифленой линзы 600, которая может быть встроена в фонари 114 заднего хода и/или стоп-сигналы 115 и выполнена с возможностью фокусировки световых полос в горизонтальный световой рисунок 608, содержащий множество направленных световых пучков. Следует понимать, что для создания требуемого светового рисунка для любого из световых приборов транспортного средства может быть использована другая оптическая технология. Например, вместо горизонтальных световых рисунков 508, 608, показанных на Фиг. 8A и 8B, световые приборы транспортного средства могут включать в себя вертикально ориентированную дифракционную решетку для проецирования вертикального светового рисунка, содержащего множество вертикальных световых пучков (например, повернутых на 90 градусов относительно световых рисунков 508, 608).
[00056] Таким образом, настоящее изобретение обеспечивает технологии для индикации на окне транспортного средства расстояния между транспортным средством и объектом на пути транспортного средства при направлении водителем транспортного средства на парковочное место, например, вплотную к стене или в пределах парковочной конструкции. Световой рисунок, проецируемый на объект одним или более световыми приборами транспортного средства, виден через окно транспортного средства, обращенное к объекту, и обеспечивает определенные маркеры, которые изменяются при изменении расстояния между транспортным средством и объектом. Один или более индикаторов близости транспортного средства расположены на окне транспортного средства (например, на переднем или заднем ветровом стекле) в заданных местоположениях, которые соответствуют местоположениям этих маркеров в световом рисунке при нахождении транспортного средства на требуемом расстоянии от объекта или в пределах парковочного места. Соответственно расстояние между маркерами или определенными элементами светового рисунка и одним или более индикаторами близости обеспечивает индикацию расстояния между транспортным средством и объектом, а выравнивание определенных элементов светового рисунка с индикатором(ами) близости сигнализирует водителю о том, что транспортное средство находится на требуемом расстоянии от объекта и, следовательно, в пределах парковочного места.
[00057] Следует подчеркнуть, что вышеописанные варианты выполнения, в частности, любые «предпочтительные» варианты выполнения представляют собой возможные примеры осуществлений, изложенные только для четкого понимания принципов изобретения. Множество изменений и модификаций может быть выполнено в вышеописанном(ых) варианте(ах) выполнения по существу без отклонения от замысла и принципов описанных здесь технологий. Все такие преобразования должны быть включены в пределы объема охраны этого раскрытия и защищены следующей далее формулой изобретения. Это включает в себя любые альтернативные осуществления процессов или способов, показанных на фигурах, например, на Фиг. 7, в которых функции могут быть выполнены в порядке, отличном от показанного или рассмотренного, включая по существу одновременный или обратный порядок, в зависимости от заложенных функциональных возможностей, которые будут понятны специалисту в области техники.
Группа изобретений относится к обеспечению визуального индикатора при нахождении транспортного средства на требуемом расстоянии от объекта. Транспортное средство содержит концевую часть, обращенную к внешнему объекту, световой прибор транспортного средства, окно, смежное с концевой частью, и индикатор близости. Световой прибор расположен смежно концевой части и проецирует световой рисунок на объект. Индикатор близости присоединен к окну в заданном положении и выровнен со световым рисунком на объекте при нахождении концевой части на заданном расстоянии от объекта. Достигается повышение эффективности помощи при парковке. 3 н. и 17 з.п. ф-лы, 8 ил.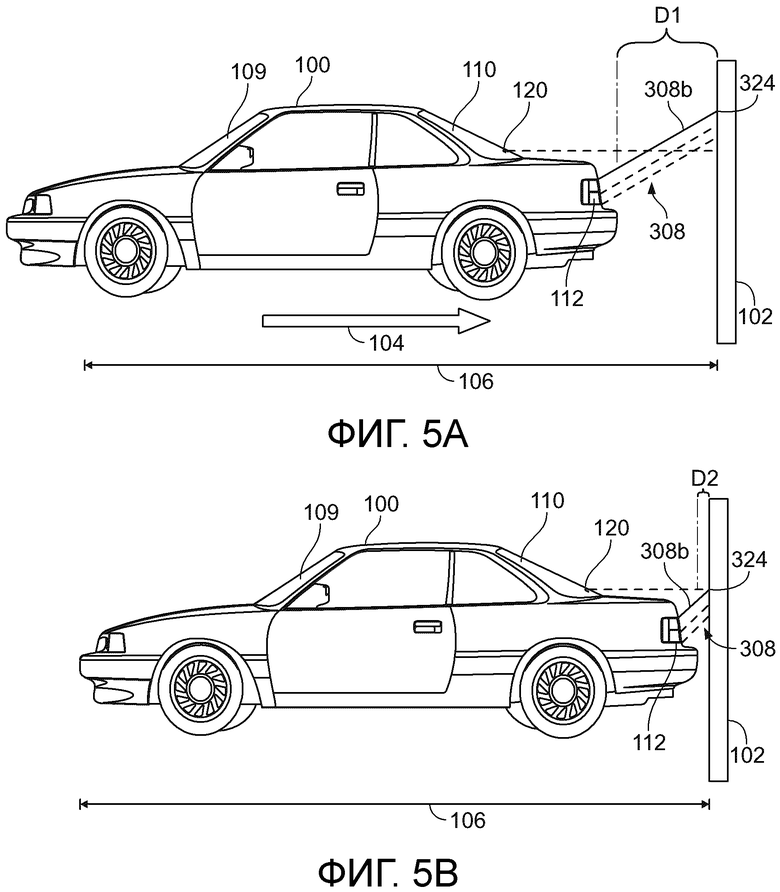
1. Транспортное средство, содержащее:
концевую часть, обращенную к внешнему объекту;
по меньшей мере один световой прибор транспортного средства, расположенный смежно концевой части и проецирующий световой рисунок на объект;
окно, смежное с концевой частью; и
по меньшей мере один индикатор близости, присоединенный к окну в заданном положении, причем по меньшей мере один индикатор близости выровнен со световым рисунком на объекте при нахождении концевой части на заданном расстоянии от объекта.
2. Транспортное средство по п. 1, в котором световой рисунок перемещается вдоль объекта и относительно по меньшей мере одного индикатора близости на окне при движении концевой части транспортного средства к объекту с первого расстояния до заданного расстояния.
3. Транспортное средство по п. 2, в котором световой рисунок включает в себя два световых пучка, выполненных с возможностью горизонтального перемещения друг от друга при движении концевой части транспортного средства к объекту с первого расстояния.
4. Транспортное средство по п. 3, в котором два световых пучка разнесены друг от друга на предполагаемое горизонтальное расстояние, при нахождении концевой части транспортного средства на заданном расстоянии от объекта, причем по меньшей мере один индикатор близости включает в себя первый индикатор близости, соединенный с окном в первом положении, и второй индикатор близости, соединенный с окном.
5. Транспортное средство по п. 4, в котором первый индикатор близости выравнивается с первым из двух световых пучков и второй датчик индикатора близости выравнивается со вторым из двух световых пучков, при нахождении концевой части на заданном расстоянии от объекта.
6. Транспортное средство по п. 2, в котором световой рисунок включает в себя по меньшей мере один световой пучок, выполненный с возможностью перемещения вертикально вниз вдоль объекта при движении концевой части транспортного средства к объекту.
7. Транспортное средство по п. 6, в котором по меньшей мере один световой пучок расположен на объекте на предполагаемой вертикальной высоте при нахождении концевой части транспортного средства на заданном расстоянии от объекта таким образом, что по меньшей мере один индикатор близости выравнивается с по меньшей мере одним световым пучком, когда по меньшей мере один световой пучок находится на предполагаемой вертикальной высоте.
8. Транспортное средство по п. 1, в котором концевая часть включает в себя по меньшей мере одну из передней концевой части транспортного средства и задней концевой части транспортного средства.
9. Транспортное средство по п. 1, в котором по меньшей мере один световой прибор транспортного средства выбран из по меньшей мере одного из передних световых приборов транспортного средства и задних световых приборов транспортного средства, встроенных в транспортное средство.
10. Транспортное средство по п. 1, в котором по меньшей мере один индикатор близости выравнивается с по меньшей мере одной нитью обогрева и находится на окне и с третьим стоп-сигналом.
11. Транспортное средство по п. 1, в котором по меньшей мере один индикатор близости встроен в окно.
12. Транспортное средство по п. 1, в котором световой рисунок является видимым через окно из пространства внутри транспортного средства.
13. Транспортное средство по п. 1, в котором индикатор близости, присоединенный к окну, не излучает свет.
14. Транспортное средство по п. 1, в котором с позиции водителя световой рисунок находится внутри индикатора близости, когда концевая часть находится на заданном расстоянии от объекта.
15. Транспортное средство по п. 1, в котором по меньшей мере один индикатор близости включает в себя первый индикатор, который выравнивается со световым рисунком на объекте, когда концевая часть находится на заданном расстоянии от объекта, и второй индикатор, который выравнивается со световым рисунком на объекте, когда концевая часть находится на втором заданном расстоянии от объекта.
16. Транспортное средство, содержащее:
заднюю концевую часть;
заднее окно;
задний световой прибор, выполненный с возможностью проецирования светового рисунка на объект позади задней концевой части; и
индикатор близости, присоединенный к заднему окну в заданном положении, индикатор близости выровнен со световым рисунком, проектируемым на объект, при нахождении задней концевой части на заданном расстоянии от объекта.
17. Транспортное средство по п. 16, в котором задний световой прибор выбран из по меньшей мере одного из задних фонарей, стоп-сигналов и фонарей заднего хода.
18. Транспортное средство по п. 16, в котором индикатор близости представляет собой наклейку или переводное изображение, приклеенное к заднему окну.
19. Транспортное средство, содержащее:
переднюю концевую часть;
переднее окно;
передний световой прибор, выполненный с возможностью проецирования светового рисунка на объект перед передней концевой частью; и
индикатор близости, присоединенный к переднему окну в заданном положении, причем индикатор близости выровнен со световым рисунком, проецируемым на объект, когда передний конец расположен на заданном расстоянии от объекта.
20. Транспортное средство по п. 19, в котором передний световой прибор выбран из по меньшей мере одного из передних фар, противотуманных фар и дневных ходовых огней.
| US 2012044090 A1, 23.02.2012 | |||
| US 2004041983 A1, 04.03.2004 | |||
| US 2007046500 A1, 01.03.2007 | |||
| US 2008080203 A1, 03.04.2008 | |||
| DE 19749439 A1, 12.05.1999. |

