[Область техники]
[0001]
Настоящее изобретение относится к способу управления движением транспортного средства и устройству управления движением транспортного средства, которые управляют движением рассматриваемого транспортного средства с помощью автономного управления движением.
[Уровень техники]
[0002]
Известно устройство контроля безопасности, которое сконфигурировано так, что, когда припаркованное транспортное средство трогается с места, предопределенный рисунок проецируется на поверхность дороги, чтобы привлечь внимание других транспортных средств, движущихся по стоянке, и пешеходов к началу операции трогания с места рассматриваемого транспортного средства (Патентный Документ 1).
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP2016-101797A
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
Однако в вышеупомянутом предшествующем уровне техники предопределенный рисунок для привлечения внимания к операции трогания с места рассматриваемого транспортного средства просто проецируется на поверхность дороги, и этот предопределенный рисунок не является рисунком, который представляет диапазон обнаружения для препятствия. Соответственно, пешеходы или подобное не могут распознать, действительно ли транспортное средство обнаруживает пешеходов или подобное.
[0005]
Проблема, которая подлежит решению с помощью настоящего изобретения, состоит в том, чтобы предоставить способ управления движением транспортного средства и устройство управления движением транспортного средства, с помощью которых, когда выполняется автономное управление движением, диапазон обнаружения для объекта, фактически обнаруживаемого рассматриваемым транспортным средством, может быть распознан упомянутым объектом.
[Средства для решения проблем]
[0006]
Настоящее изобретение решает вышеуказанную проблему посредством, при управлении транспортным средством, имеющим функцию автономного управления движением, для выполнения автономного движения, обнаружения, присутствует ли объект в окружении транспортного средства, и отображения предопределенного рисунка, соответствующего диапазону обнаружения, в определенном положении на поверхности дороги по направлению к упомянутому диапазону обнаружения, так что упомянутый предопределенный рисунок является видимым.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению объект, например человек, присутствующий в окружении транспортного средства, может зрительно распознавать отображение предопределенного рисунка, отображаемого в определенном положении на поверхности дороги, тем самым распознавая диапазон обнаружения для объекта, обнаруженного транспортным средством.
[Краткое описание чертежей]
[0008]
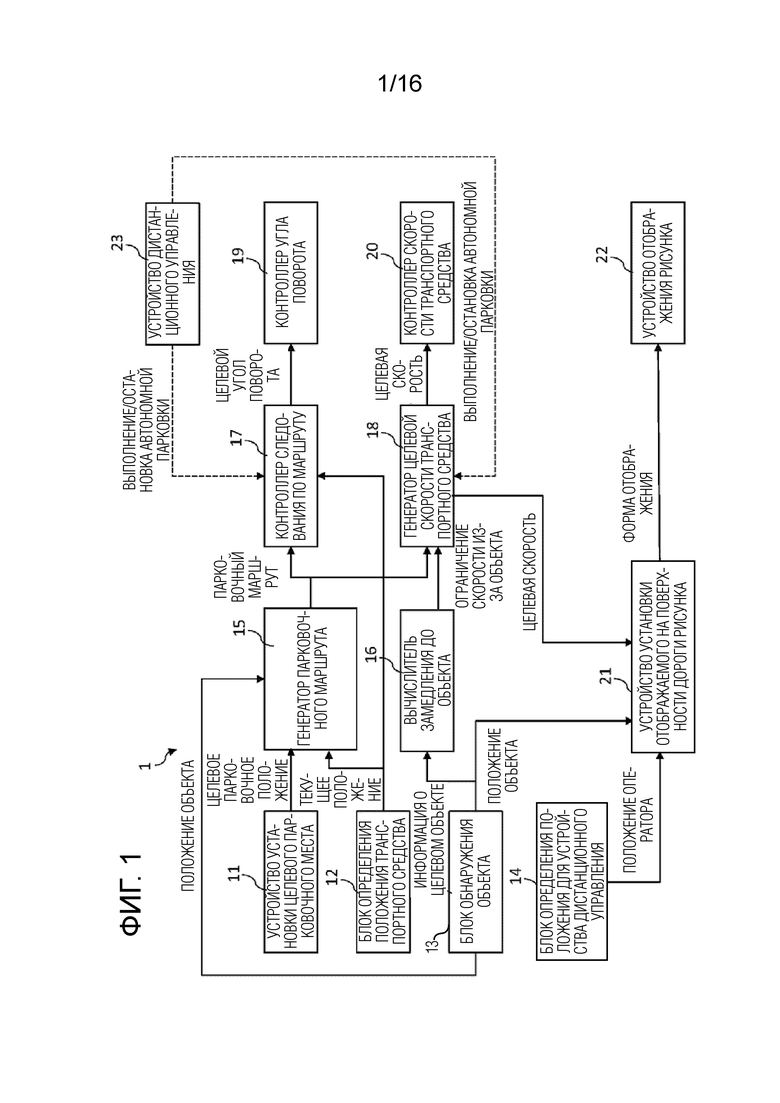
ФИГ. 1 представляет собой блок-схему, показывающую систему дистанционной парковки, к которой применяются способ управления движением транспортного средства и устройство управления движением транспортного средства согласно настоящему изобретению.
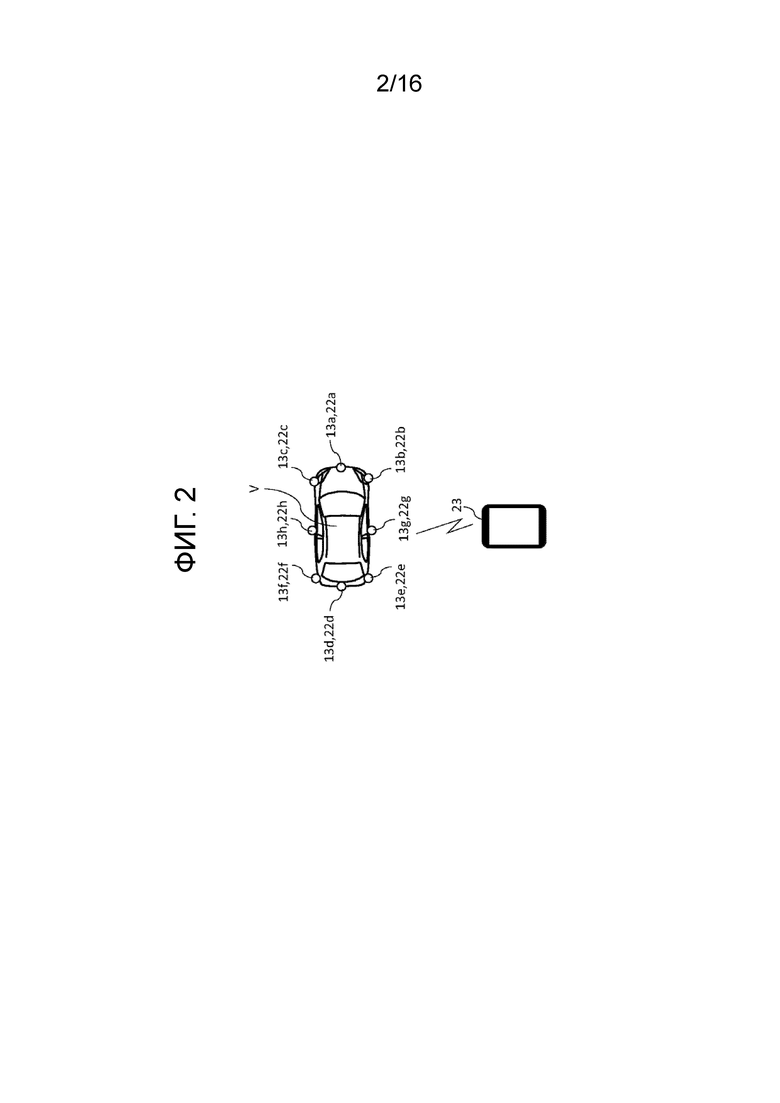
ФИГ. 2 представляет собой вид сверху, показывающий устройство дистанционного управления и состояние, в котором блоки обнаружения объектов и устройства отображения рисунков с ФИГ. 1 прикреплены к транспортному средству.
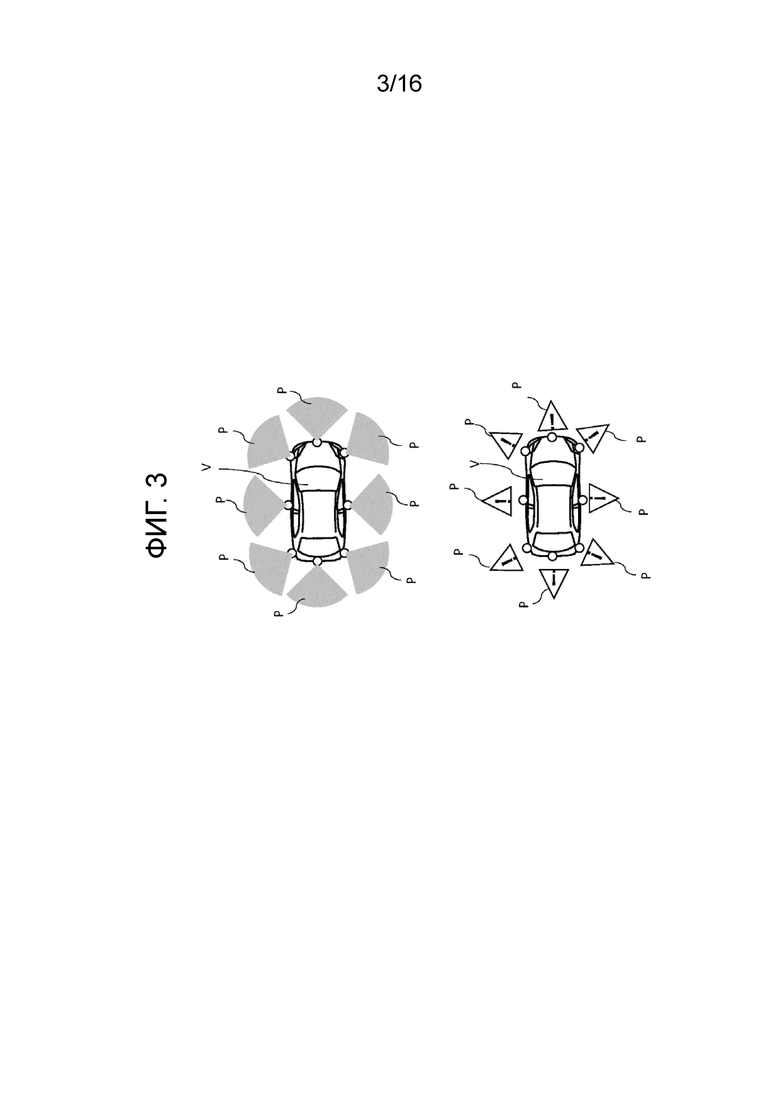
ФИГ. 3 представляет собой набор видов сверху, показывающих примеры состояния, в котором устройства отображения рисунков с ФИГ. 1 отображают рисунки в определенных положениях на поверхности дороги.
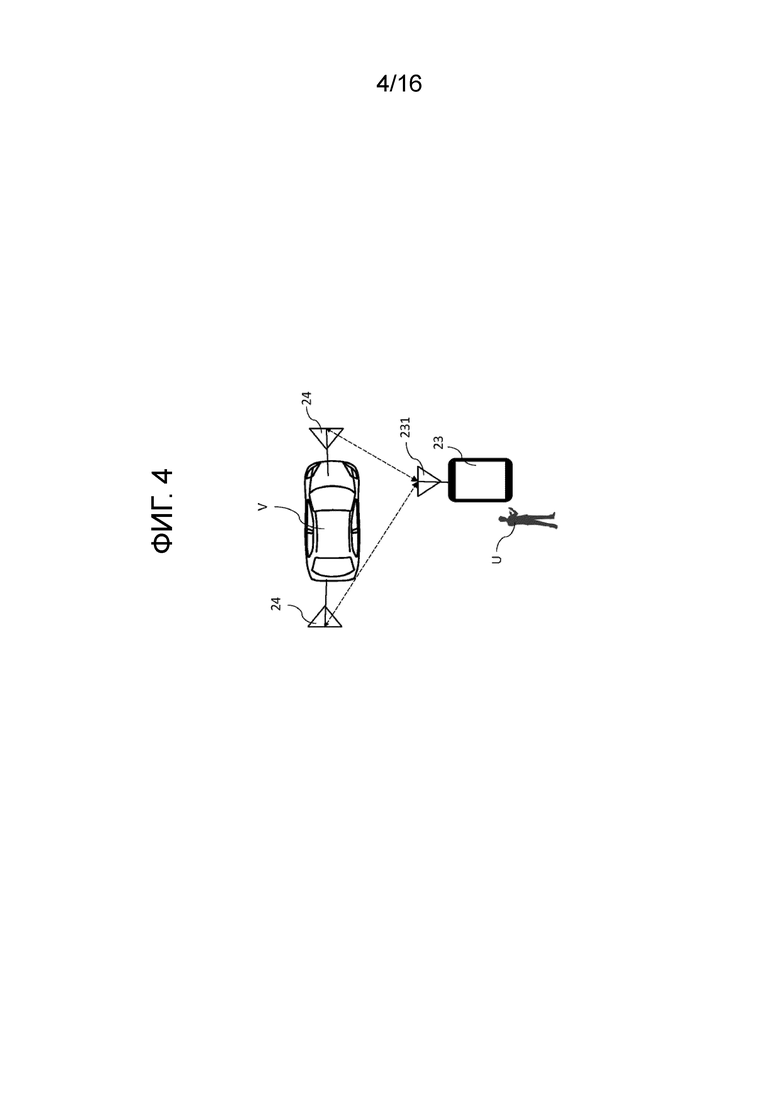
ФИГ. 4 представляет собой схему, показывающую пример блока определения положения для устройства дистанционного управления с ФИГ. 1.
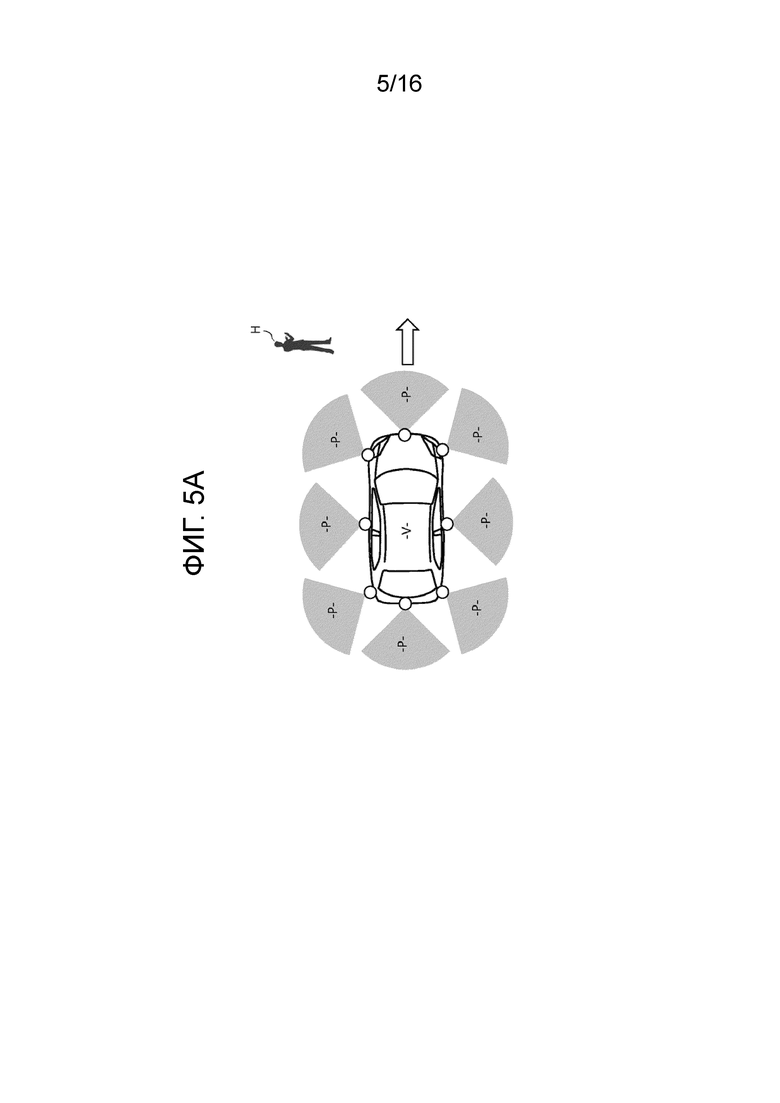
ФИГ. 5A представляет собой вид сверху (часть 1), показывающий пример формы отображения рисунков, которые отображаются в определенных положениях на поверхности дороги устройствами отображения рисунков с ФИГ. 1.
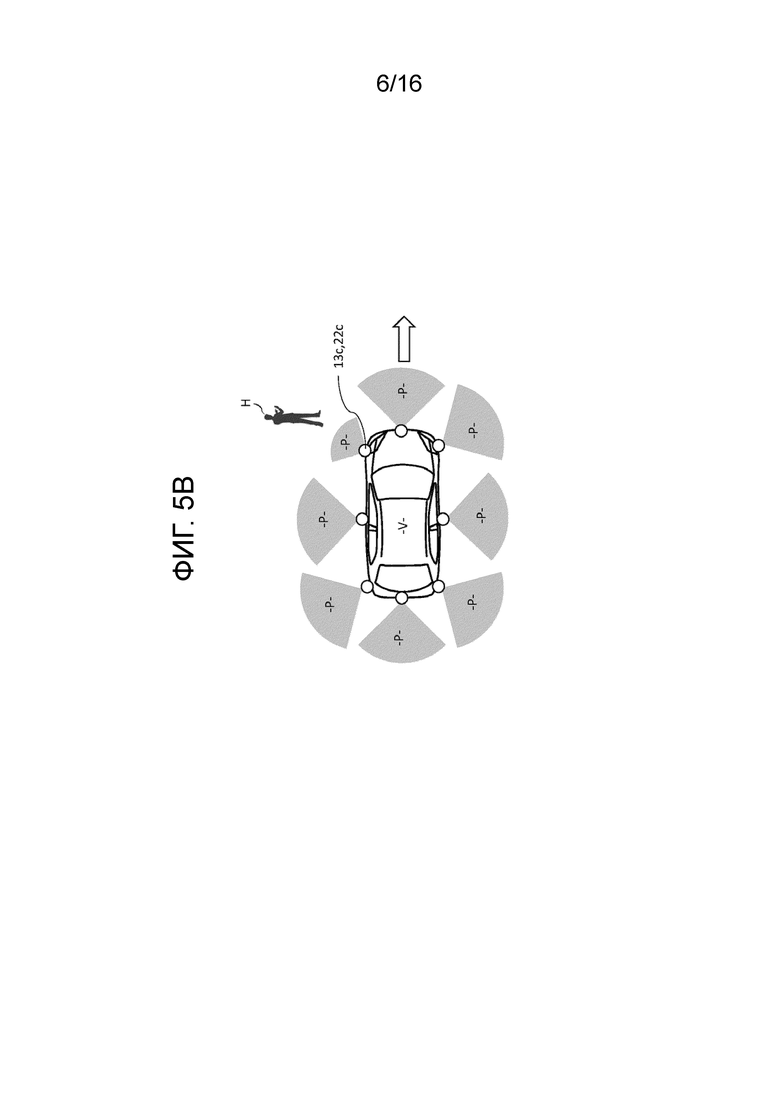
ФИГ. 5B представляет собой вид сверху (часть 2), показывающий пример формы отображения рисунков, которые отображаются в определенных положениях на поверхности дороги устройствами отображения рисунков с ФИГ. 1.
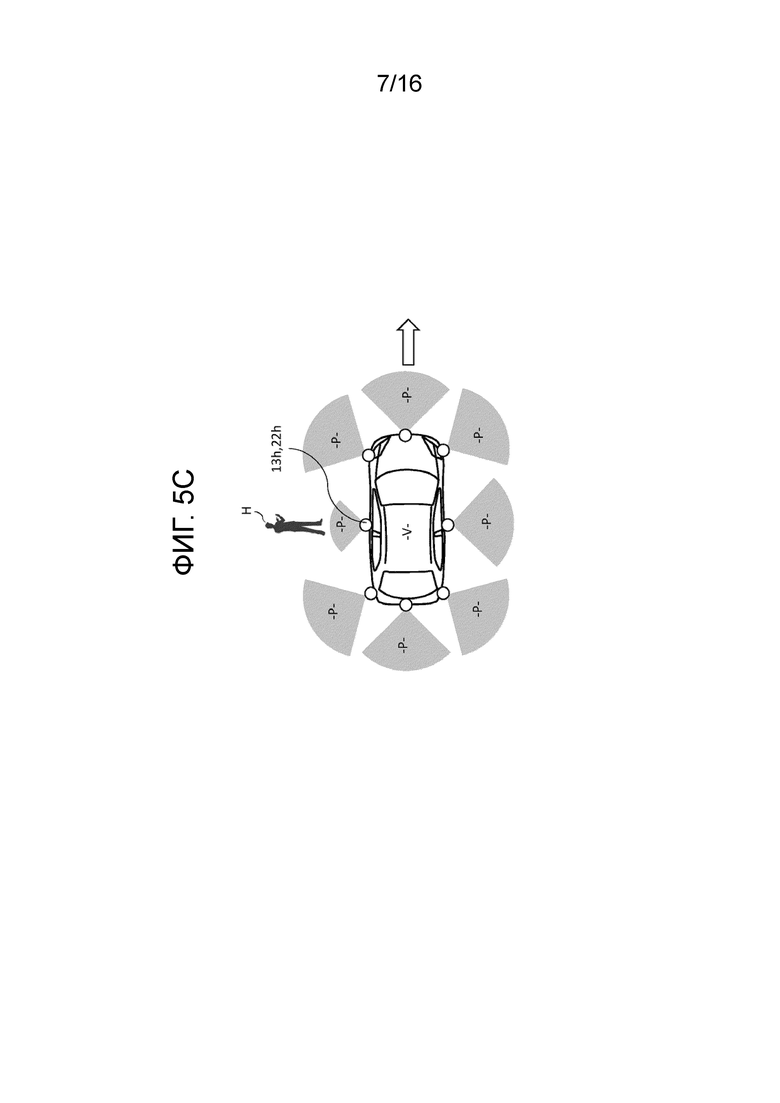
ФИГ. 5С представляет собой вид сверху (часть 3), показывающий пример формы отображения рисунков, которые отображаются в определенных положениях на поверхности дороги устройствами отображения рисунков с ФИГ. 1.
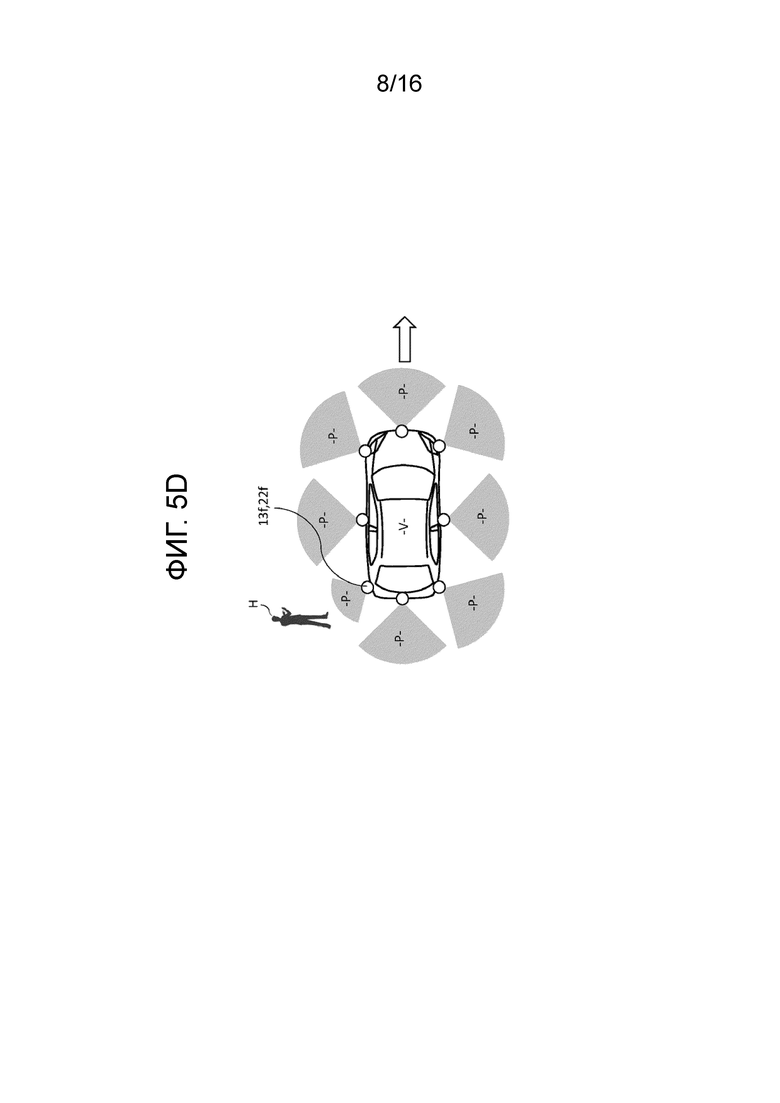
ФИГ. 5D представляет собой вид сверху (часть 4), показывающий пример формы отображения рисунков, которые отображаются в определенных положениях на поверхности дороги устройствами отображения рисунков с ФИГ. 1.
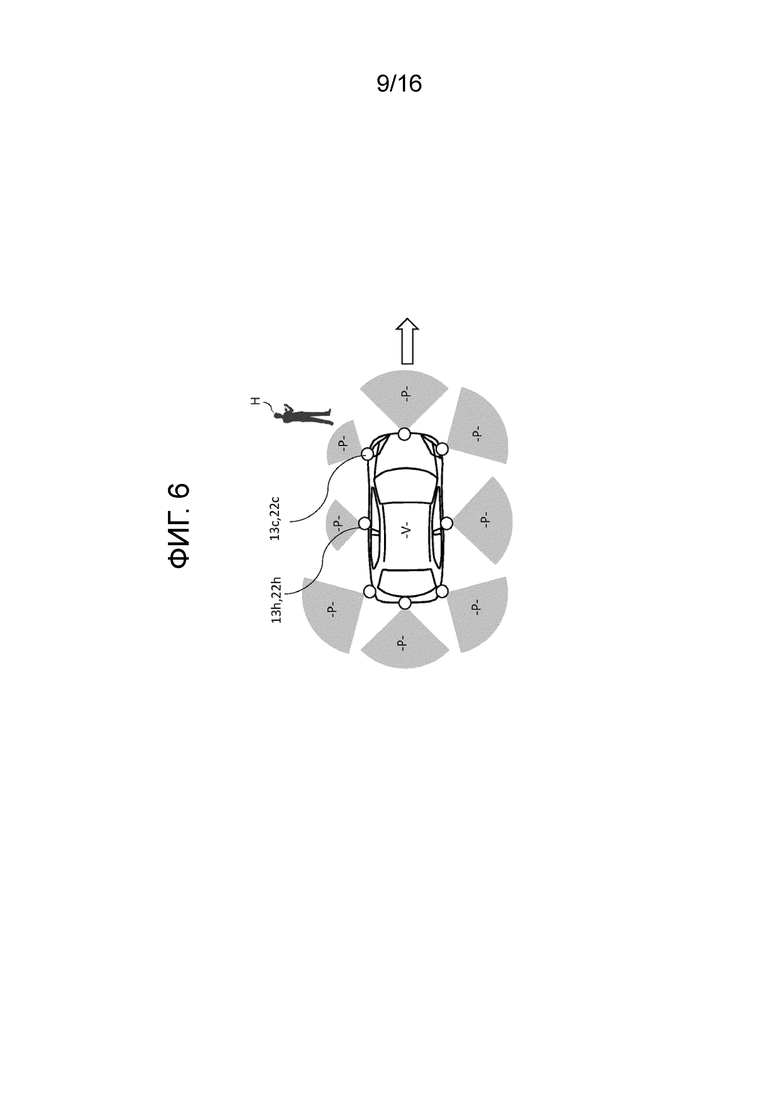
ФИГ. 6 представляет собой вид сверху, показывающий другой пример формы отображения рисунков, которые отображаются в определенных положениях на поверхности дороги устройствами отображения рисунков с ФИГ. 1.
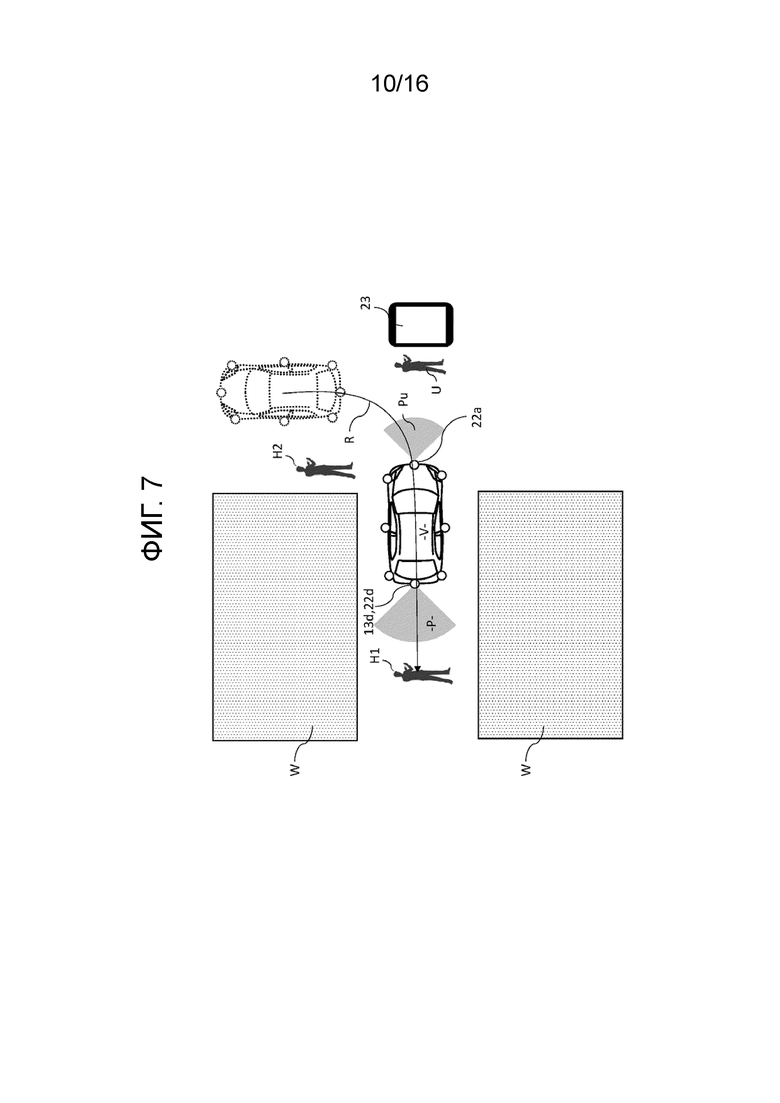
ФИГ. 7 представляет собой вид сверху, показывающий еще один другой пример формы отображения рисунков, которые отображаются в определенных положениях на поверхности дороги устройствами отображения рисунков с ФИГ. 1.
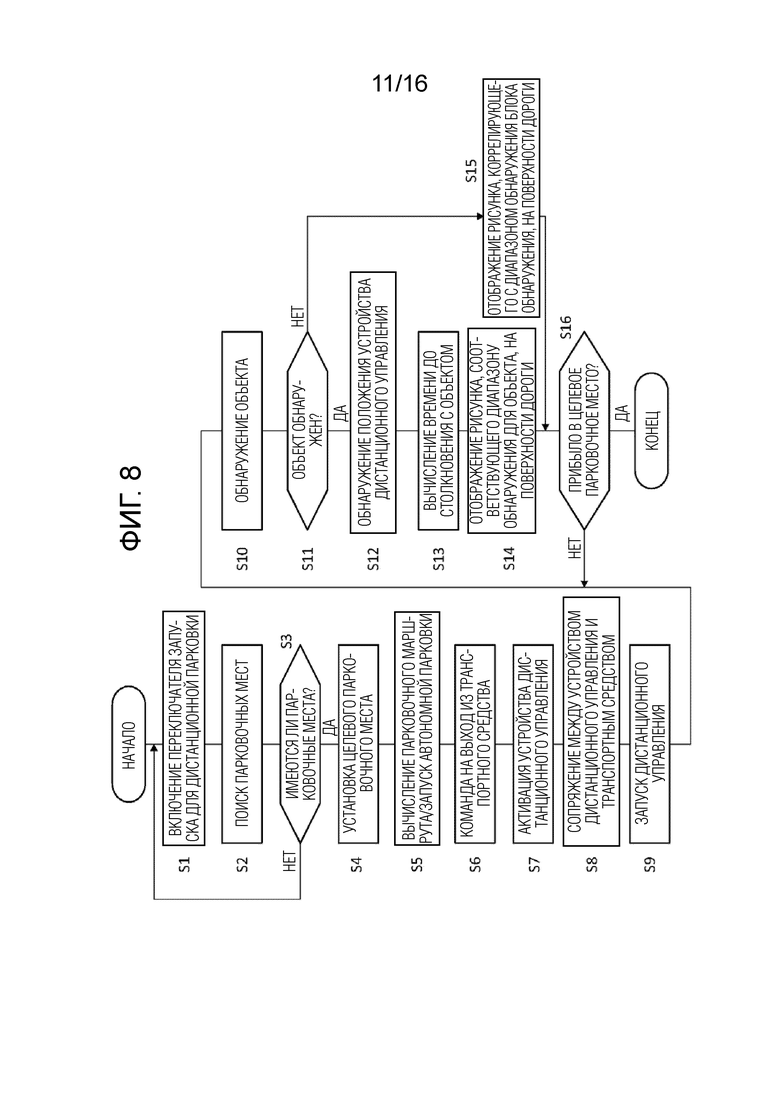
ФИГ. 8 представляет собой блок-схему, показывающую процедуру управления, выполняемую в системе дистанционной парковки с ФИГ. 1.
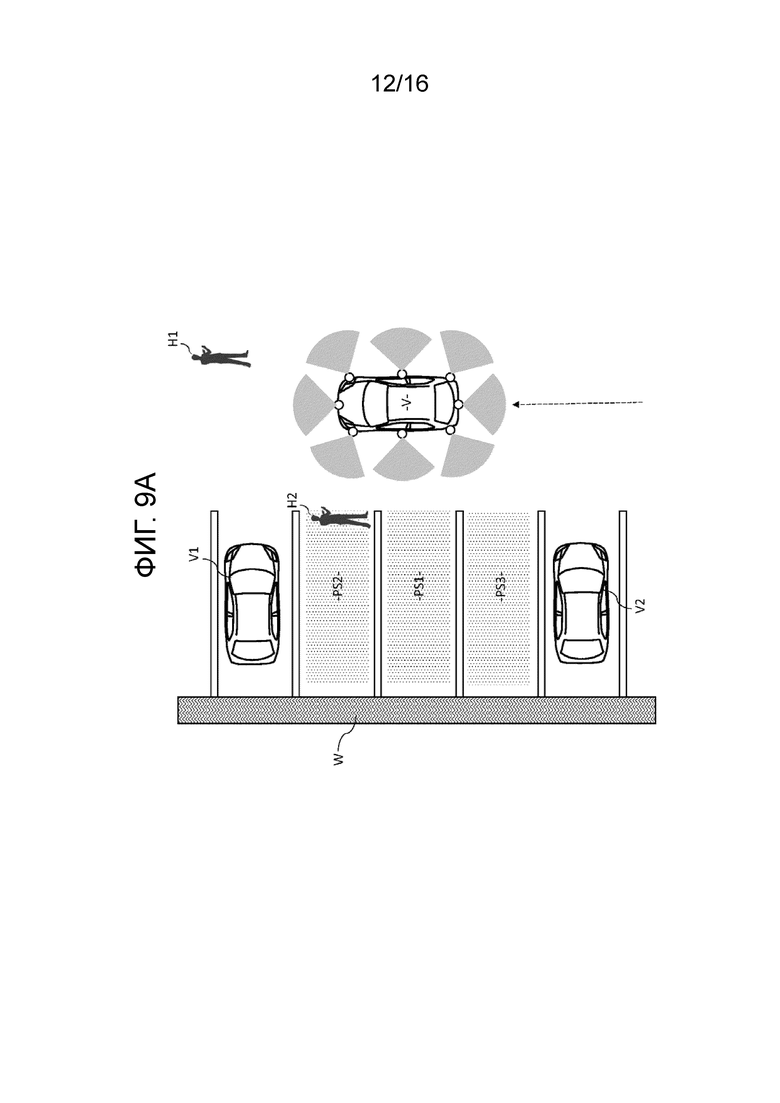
ФИГ. 9A представляет собой вид сверху (часть 1), показывающий пример дистанционной парковки задним ходом, выполняемой в системе дистанционной парковки с ФИГ. 1.
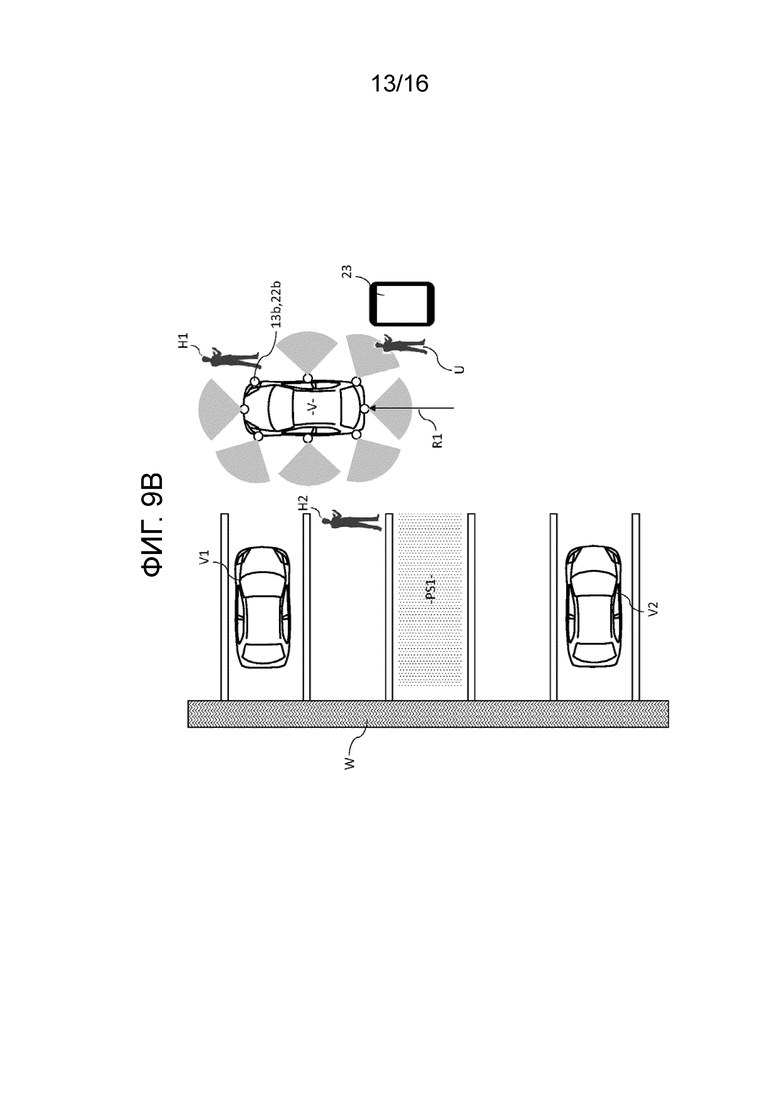
ФИГ. 9B представляет собой вид сверху (часть 2), показывающий пример дистанционной парковки задним ходом, выполняемой в системе дистанционной парковки с ФИГ. 1.
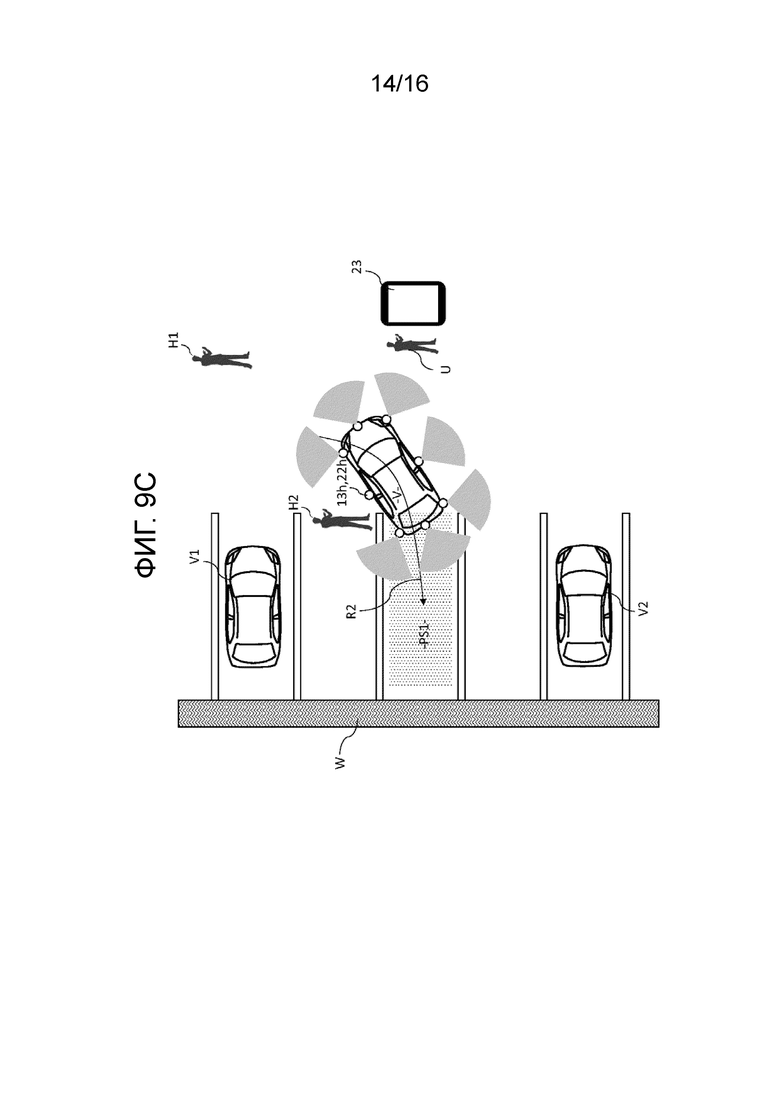
ФИГ. 9C представляет собой вид сверху (часть 3), показывающий пример дистанционной парковки задним ходом, выполняемой в системе дистанционной парковки с ФИГ. 1.
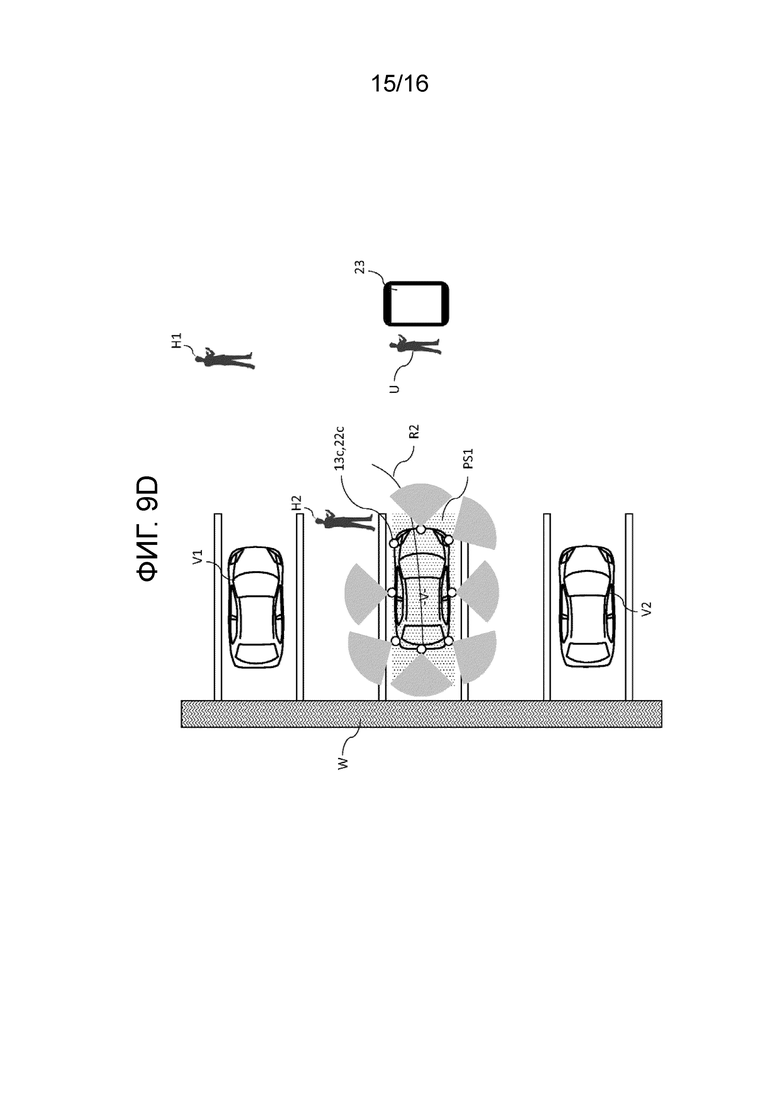
ФИГ. 9D представляет собой вид сверху (часть 4), показывающий пример дистанционной парковки задним ходом, выполняемой в системе дистанционной парковки с ФИГ. 1.
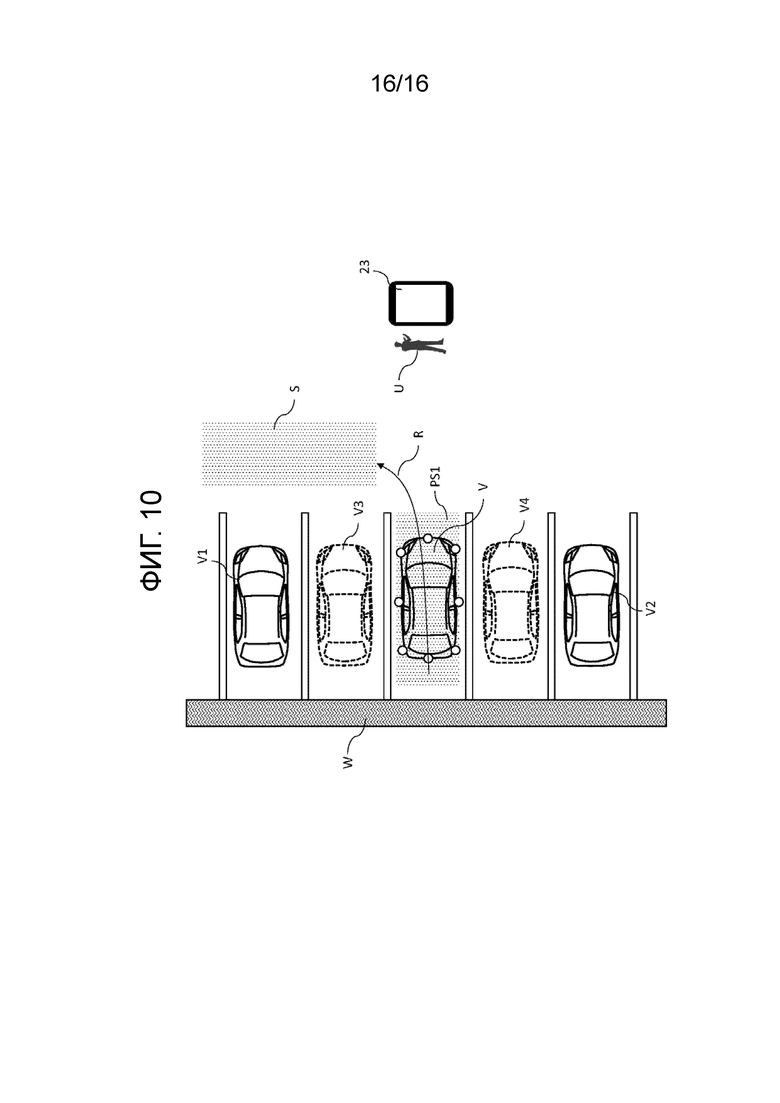
ФИГ. 10 представляет собой вид сверху, показывающий пример удаленного выезда, выполняемого в системе дистанционной парковки с ФИГ. 1.
[Вариант(ы) осуществления настоящего изобретения]
[0009]
Далее один или несколько вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи. ФИГ. 1 представляет собой блок-схему, показывающую систему 1 дистанционной парковки, к которой применяются способ управления движением транспортного средства и устройство управления движением транспортного средства согласно настоящему изобретению. Способ управления движением транспортного средства и устройство управления движением транспортного средства согласно настоящему изобретению могут быть применены не только для дистанционной парковки, но также и для обычного автономного управления движением. Настоящее изобретение будет описано в данном документе со ссылкой на дистанционную парковку.
[0010]
В настоящем описании «парковка» относится к постоянной стоянке транспортного средства на парковочном месте, а термин «парковочный маршрут» охватывает не только маршрут для въезда на парковочное место или в гараж, но также и маршрут для выезда из парковочного места или гаража. В этом смысле «способ управления движением транспортного средства и устройство управления движением транспортного средства, используемые при парковке» согласно настоящему изобретению охватывают как управление движением транспортного средства во время въезда на парковочное место или в гараж, так и управление движением транспортного средства во время выезда из парковочного места или гаража. Въезд на парковочное место или в гараж можно просто называть въездом или входом, а выезд из парковочного места или гаража можно просто называть выездом или выходом. Автономное управление движением или автономное управление парковкой относится к управлению транспортным средством для движения или парковки (въезда на парковочное место или гараж, или выезда из него) посредством автоматизированного или автономного управления, выполняемого бортовым устройством управления движением, не полагаясь на операцию вождения со стороны водителя.
[0011]
Система 1 дистанционной парковки согласно одному или нескольким вариантам осуществления настоящего изобретения представляет собой систему для выполнения операции въезда на парковочное место или в гараж, или выезда из него с помощью автономного управления движением при выполнении упомянутой операции. Во время упомянутой операции водитель выходит из транспортного средства и продолжает передавать команду выполнения с устройства дистанционного управления, проверяя и подтверждая безопасность, тем самым поддерживая автономное управление парковкой. Когда транспортное средство может столкнуться с препятствием, автономное управление парковкой останавливается путем передачи команды остановки или остановки передачи команды выполнения. В нижеследующем описании режим автономного управления движением для въезда с использованием дистанционного управления будет именоваться режимом дистанционного въезда, а режим автономного управления движением для выезда с использованием дистанционного управления будет называться режимом дистанционного выезда.
[0012]
В узком парковочном месте, в котором боковые двери не могут быть полностью открыты, например, в узком гараже или месте для парковки, в которых, как показано на ФИГ. 10, например, другие транспортные средства V3 и V4 припаркованы по обе стороны от рассматриваемого транспортного средства V, водителю может быть трудно сесть в транспортное средство или выйти из него. Чтобы обеспечить возможность парковки даже в таком случае, режим дистанционного въезда или режим дистанционного выезда используется вместе с дистанционным управлением. В случае въезда на парковочное место, после того, как режим дистанционного въезда инициирован для вычисления маршрута въезда на выбранное парковочное место и запуска автономного управления въездом, водитель выходит из транспортного средства, неся устройство дистанционного управления, и продолжает передавать команду выполнения с устройства дистанционного управления для завершения въезда на выбранное парковочное место. С другой стороны, в случае выезда из парковочного места, водитель включает двигатель внутреннего сгорания или электродвигатель транспортного средства с использованием устройства дистанционного управления, переносимого водителем, и после того, как режим дистанционного выезда инициирован для вычисления маршрута выезда в выбранное положение выезда и запуска автономного управления выездом, водитель продолжает передавать команду выполнения с устройства дистанционного управления для завершения выезда с парковочного места, и после этого садится в транспортное средство. Таким образом, система 1 дистанционной парковки согласно одному или нескольким вариантам осуществления настоящего изобретения представляет собой систему, которая имеет режим дистанционного въезда с использованием такого дистанционного управления и режим дистанционного выезда также с использованием дистанционного управления.
[0013]
Система 1 дистанционной парковки согласно одному или нескольким вариантам осуществления настоящего изобретения включает в себя устройство 11 установки целевого парковочного места, блок 12 определения положения транспортного средства, блок 13 обнаружения объекта, блок 14 определения положения для устройства дистанционного управления, генератор 15 парковочного маршрута, вычислитель 16 замедления до объекта, контроллер 17 следования по маршруту, генератор 18 целевой скорости транспортного средства, контроллер 19 угла поворота, контроллер 20 скорости транспортного средства, устройство 21 установки отображаемого на поверхности дороги рисунка, устройство 22 отображения рисунка и устройство 23 дистанционного управления. Каждая конфигурация будет описана ниже.
[0014]
В режиме дистанционного въезда устройство 11 установки целевого парковочного места осуществляет поиск парковочных мест, имеющихся в окружении рассматриваемого транспортного средства, позволяет оператору выбрать желаемое парковочное место из доступных парковочных мест и выводит информацию о положении парковочного места (например, координаты относительного положения от текущего положения рассматриваемого транспортного средства и широту/долготу) в генератор 15 парковочного маршрута. В режиме дистанционного выезда устройство 11 установки целевого парковочного места осуществляет поиск мест выезда, имеющихся в окружении рассматриваемого транспортного средства, которое в настоящий момент припарковано, позволяет оператору выбрать желаемое место выезда из доступных мест выезда и выводит информацию о положении места выезда (например, координаты относительного положения от текущего положения рассматриваемого транспортного средства и широту/долготу) в генератор 15 парковочного маршрута. Место выезда относится к положению S временной остановки для рассматриваемого транспортного средства, в котором, как показано на ФИГ. 10, оператор садится в рассматриваемое транспортное средство после выполнения операции выезда в режиме дистанционного въезда.
[0015]
Для достижения описанных выше функций устройство 11 установки целевого парковочного места включает в себя переключатель ввода, который вводит и управляет режимом дистанционного въезда или режимом дистанционного выезда, множество камер (не показаны, блок 13 обнаружения объекта, который будет описан ниже, может служить в качестве этих камер), которые захватывают изображения вокруг рассматриваемого транспортного средства, компьютер, на котором установлено программное обеспечение для поиска доступных парковочных мест на основе данных изображений, захваченных камерами, и дисплей типа сенсорной панели, который отображает изображение, включающее в себя доступные парковочные места. Когда оператор, например водитель, выбирает режим дистанционного въезда с использованием переключателя ввода, камеры получают данные изображений вокруг рассматриваемого транспортного средства, а дисплей отображает изображение, включающее в себя доступные парковочные места. Когда оператор выбирает желаемое парковочное место из отображаемых парковочных мест, устройство 11 установки целевого парковочного места выводит информацию о положении парковочного места (например, координаты относительного положения от текущего положения рассматриваемого транспортного средства и широту/долготу) в генератор 15 парковочного маршрута. При поиске доступных парковочных мест, когда картографическая информация, хранимая в навигационном устройстве, включает в себя информацию о парковке с подробной информацией о положении, эта информация о парковке может быть использована. Когда оператор, например водитель, запускает двигатель внутреннего сгорания или электродвигатель рассматриваемого транспортного средства, используя устройство 23 дистанционного управления, и выбирает режим дистанционного выезда с помощью переключателя ввода устройства 23 дистанционного управления, камеры получают данные изображения вокруг рассматриваемого транспортного средства, а дисплей устройства 23 дистанционного управления отображает изображение, включающее в себя доступные места выезда. Когда оператор выбирает желаемое место выезда из отображаемых мест выезда, устройство 11 установки целевого парковочного места выводит информацию о положении места выезда (например, координаты относительного положения от текущего положения рассматриваемого транспортного средства и широту/долготу) в генератор 15 парковочного маршрута.
[0016]
Блок 12 определения положения транспортного средства состоит из блока GPS, гиродатчика, датчика скорости транспортного средства и других компонентов. Блок 12 определения положения транспортного средства обнаруживает радиоволны, передаваемые от множества спутниковых передач, используя блок GPS, для периодического получения информации о положении рассматриваемого транспортного средства, а также определяет текущее положение рассматриваемого транспортного средства на основе полученной информации о положении рассматриваемого транспортного средства, информации об изменении угла, получаемой от гиродатчика, и скорости транспортного средства, получаемой от датчика скорости транспортного средства. Информация о положении рассматриваемого транспортного средства, обнаруживаемая блоком 12 определения положения транспортного средства, выводится в генератор 15 парковочного маршрута и контроллер 17 следования по маршруту с предопределенными временными интервалами.
[0017]
Блок 13 обнаружения объекта выполнен с возможностью выполнения поиска, присутствует ли объект, например препятствие, в окружении рассматриваемого транспортного средства. Блок 13 обнаружения объекта включает в себя камеру, радар (например, радар на миллиметровых волнах, лазерный радар, или ультразвуковой радар), ультразвуковой локатор, или их комбинацию. Камера, радар, ультразвуковой локатор или подобное, или их комбинация прикрепляются к части внешней панели рассматриваемого транспортного средства. ФИГ. 2 представляет собой вид сверху, показывающий пример состояния, в котором блоки 13a - 13h обнаружения объектов прикреплены к транспортному средству V. В этом примере блоки 13a - 13h обнаружения объектов прикреплены к восьми соответствующим участкам в центре 13a и с обеих сторон 13b и 13c переднего бампера, центре 13d и с обеих сторон 13e и 13f заднего бампера, а также на внешних порогах 13g и 13h под правой и левой центральными стойками. Блоки 13a - 13h обнаружения объектов вместе могут именоваться блоком или блоками 13 обнаружения объектов. Участки, к которым прикрепляются блоки 13 обнаружения объектов, и количество блоков 13 обнаружения объектов, как показано на ФИГ. 2, представляют лишь пример, и блоки 13 обнаружения объектов также могут быть прикреплены к другим участкам, которые на этой фигуре не показаны. Количество участков, к которым прикрепляются блоки 13 обнаружения объектов, также может быть меньше восьми, или девять или больше. Блок 13 обнаружения объекта дополнительно включает в себя компьютер, на котором установлено программное обеспечение для указания положения объекта, обнаруженного камерой, радаром или подобными, а информация об указанном объекте (информация о целевом объекте) и его информация о положении (например, координаты относительного положения от текущего положения рассматриваемого транспортного средства и широта/долгота) выводятся в генератор 15 парковочного маршрута, вычислитель 16 замедления до объекта и устройство 21 установки отображаемого на поверхности дороги рисунка.
[0018]
Снова обращаясь к ФИГ. 1, датчик 14 положения для устройства 23 дистанционного управления представляет собой устройство для определения положения устройства 23 дистанционного управления, которое будет описано ниже, когда устройство 23 дистанционного управления выносят из транспортного средства. Как показано на ФИГ. 4, например, датчик 14 положения состоит из по меньшей мере двух антенн 24 и 24, установленных в разных положениях на рассматриваемом транспортном средстве V, антенны 231 устройства 23 дистанционного управления, датчиков, которые определяют интенсивности радиополя между антеннами 24 и 24 транспортного средства V и антенной 231 устройства дистанционного управления, а также компьютер, на котором установлено программное обеспечение для вычисления положения устройства 23 дистанционного управления на основе интенсивностей радиополя, определяемых датчиками, с использованием метода триангуляции или подобного. Радиоволны для указания положения устройства 23 дистанционного управления непрерывно передаются с предопределенными временными интервалами, и положение устройства 23 дистанционного управления, которое изменяется в настоящий момент, относительно рассматриваемого транспортного средства V указывается, например, как относительная информация о положении для рассматриваемого транспортного средства V. Радиоволны для указания положения устройства 23 дистанционного управления могут генерироваться с использованием сигнала команды выполнения от устройства 23 дистанционного управления.
[0019]
Радиоволны для указания положения устройства 23 дистанционного управления могут передаваться от антенны 231 устройства 23 дистанционного управления на антенны 24 и 24 транспортного средства V с предопределенными временными интервалами или могут также передаваться от антенн 24 и 24 транспортного средства V на антенну 231 устройства 23 дистанционного управления с предопределенными временными интервалами. В первом случае, транспортное средство V снабжается датчиками, которые определяют, которые определяют интенсивности радиополя между антеннами 24 и 24 транспортного средства V и антенной 231 устройства дистанционного управления, а также компьютером, на котором установлено программное обеспечение для вычисления положения устройства 23 дистанционного управления на основе интенсивностей радиополя, определяемых датчиками, с использованием метода триангуляции или подобного. В последнем случае устройство 23 дистанционного управления снабжается датчиками и компьютером. Информация о положении устройства дистанционного управления (информация о положении относительно рассматриваемого транспортного средства V), определяемая блоком 14 определения положения для устройства 23 дистанционного управления, выводится на устройство 21 установки отображаемого на поверхности дороги рисунка. Устройство 23 дистанционного управления выносится из транспортного средства оператором, и поэтому информация о положении устройства 23 дистанционного управления, определенная блоком 14 определения положения для устройства 23 дистанционного управления, также является информацией о положении оператора.
[0020]
Генератор 15 парковочного маршрута принимает размер рассматриваемого транспортного средства (например, ширину транспортного средства, длину транспортного средства или минимальный радиус поворота), который сохранен заранее, целевое парковочное положение (которое относится к информации о положении о парковочном месте в случае режима дистанционного въезда или информации о положении о месте выезда в случае режима дистанционного выезда, здесь и далее) от устройства 11 установки целевого парковочного места, текущую информацию о положении рассматриваемого транспортного средства от блока 12 определения положения транспортного средства, а также информацию о положении объекта (препятствия) от блока 13 обнаружения объекта, и вычисляет парковочный маршрут от текущего положения рассматриваемого транспортного средства до целевого парковочного положения (парковочный маршрут относится к маршруту въезда в случае режима дистанционного въезда или маршруту выезда в случае режима дистанционного выезда, здесь и далее). Парковочный маршрут вычисляется таким образом, чтобы не сталкиваться или не взаимодействовать с объектом. ФИГ. 9A - 9D представляют собой виды сверху, показывающие пример режима дистанционного въезда. В текущем положении рассматриваемого транспортного средства V, показанном на ФИГ. 9A, когда водитель управляет переключателем ввода для выбора режима дистанционного въезда, устройство 11 установки целевого парковочного места осуществляет поиск трех доступных парковочных места PS1, PS2 и PS3 и отображает изображение, включающее в себя эти парковочные места, на дисплее. Здесь предполагается, что водитель выбирает парковочное место PS1 в ответ на отображаемое изображение. В этом случае генератор 15 парковочного маршрута вычисляет маршруты R1 и R2 въезда из текущего положения, показанного на ФИГ. 9A, в парковочное место PS1, показанное на ФИГ. 9B, 9C и 9D.
[0021]
С другой стороны, в парковочном положении, показанном на ФИГ. 10, когда другие транспортные средства V3 и V4 припаркованы по обе стороны от рассматриваемого транспортного средства V, как показано пунктирными линиями, и водителю трудно открыть дверь, чтобы сесть в транспортное средство, режим дистанционного выезда может быть использован для управления рассматриваемым транспортным средством V для выезда с парковочного места. Это будет описано более конкретно. В состоянии, показанном на ФИГ. 10, когда водитель запускает двигатель внутреннего сгорания или электродвигатель рассматриваемого транспортного средства с помощью устройства 23 дистанционного управления и управляет переключателем ввода устройства 23 дистанционного управления для выбора режима дистанционного выезда, устройство 11 установки целевого парковочного места выполняет поиск доступного места S выезда, показанного например на ФИГ. 10, и отображает место S выезда на дисплее устройства 23 дистанционного управления. Здесь предполагается, что водитель выбирает место S выезда в ответ на такое отображение. В этом случае генератор 15 парковочного маршрута вычисляет маршрут R выезда из текущего положения, показанного на ФИГ. 10, в место S выезда. Таким образом, генератор 15 парковочного маршрута вычисляет маршрут въезда из текущего положения в парковочное место в случае режима дистанционного въезда или вычисляет маршрут выезда из текущего положения в место выезда в случае режима дистанционного выезда. Затем генератор 15 парковочного маршрута выводит маршрут въезда или маршрут выезда в контроллер 17 следования по маршруту и в генератор 18 целевой скорости транспортного средства.
[0022]
Вычислитель 16 замедления до объекта принимает информацию о положении о препятствиях и других объектах от блока 13 обнаружения объекта и работает для вычисления времени до столкновения рассматриваемого транспортного средства с объектом (TTC: время до столкновения) на основе расстояния от объекта и скорости транспортного средства и вычисления момента времени начала замедления рассматриваемого транспортного средства. Например, в режиме дистанционного въезда, показанном на ФИГ. 9A - 9D, когда объектом - препятствием является стена W парковки и расстояние от этой стены W больше или равно предопределенному значению, как показано на ФИГ. 9A - 9C, скорость транспортного средства устанавливается равной изначально установленному значению, и скорость рассматриваемого транспортного средства V замедляется в момент времени, когда время TTC до столкновения рассматриваемого транспортного средства V со стеной W становится равным или меньшим, чем предопределенное значение, как показано на ФИГ. 9D. Этот момент времени замедления выводится в генератор 18 скорости транспортного средства.
[0023]
Контроллер 17 следования по маршруту вычисляет, с предопределенными временными интервалами, целевой угол поворота для следования рассматриваемого транспортного средства по маршруту вдоль маршрута въезда или маршрута выезда на основе маршрута въезда или маршрута выезда от генератора 15 парковочного маршрута и текущего положения рассматриваемого транспортного средства от блока 12 определения положения транспортного средства. Что касается маршрутов R1 и R2 въезда с ФИГ. 9A - 9D, контроллер 17 следования по маршруту вычисляет, с предопределенным временным интервалом для каждого текущего положения рассматриваемого транспортного средства V, целевой угол поворота вдоль маршрута R1 въезда для движения прямо вперед из текущего положения, показанного на ФИГ. 9A, в положение поворота для парковки, показанное на ФИГ. 9B, и целевой угол поворота вдоль маршрута R2 въезда для поворота налево из положения поворота для парковки, показанного на ФИГ. 9B, в парковочное положение, показанное на ФИГ. 9C и ФИГ. 9D, и выводит вычисленные целевые углы поворота в контроллер 19 угла поворота.
[0024]
Генератор 18 целевой скорости транспортного средства вычисляет, с предопределенными временными интервалами, целевую скорость транспортного средства для следования рассматриваемого транспортного средства V по маршруту вдоль маршрута въезда или маршрута выезда на основе маршрута въезда или маршрута выезда от генератора 15 парковочного маршрута и момента времени начала замедления от вычислителя 16 замедления до объекта. Что касается маршрутов въезда с ФИГ. 9A - 9D, генератор 18 целевой скорости транспортного средства вычисляет, с предопределенным временным интервалом для каждого текущего положения рассматриваемого транспортного средства V, целевую скорость транспортного средства при трогании с места из текущего положения, показанного на ФИГ. 9A, и остановке в положении поворота для парковки, показанном на ФИГ. 9B, целевую скорость транспортного средства при трогании с места (движении задним ходом) из положения поворота для парковки, показанного на ФИГ. 9B, и повороте налево по пути в парковочное положение, показанное на ФИГ. 9C, и целевую скорость транспортного средства при приближении к стене W, показанной на ФИГ. 9D, и остановке там, и выводит вычисленные целевые скорости транспортного средства в контроллер 20 скорости транспортного средства.
[0025]
Контроллер 19 угла поворота генерирует управляющий сигнал для управления исполнительным механизмом рулевого управления, предусмотренным в системе рулевого управления рассматриваемого транспортного средства V, на основе целевого угла поворота от контроллера 17 следования по маршруту. Контроллер 20 скорости транспортного средства генерирует управляющий сигнал для управления исполнительным механизмом акселератора, предусмотренным в системе приведения в движение рассматриваемого транспортного средства V, на основе целевой скорости транспортного средства от генератора 18 целевой скорости транспортного средства. Контроллер 19 угла поворота и контроллер 20 скорости транспортного средства управляются одновременно, чтобы выполнять автономное управление парковкой.
[0026]
Устройство 23 дистанционного управления используется оператором U, находящимся за пределами транспортного средства, для выдачи команды, следует ли продолжить или остановить выполнение автономного управления парковкой, которое установлено устройством 11 установки целевого парковочного места. С этой целью устройство 23 дистанционного управления имеет функцию связи ближнего действия (например, с использованием антенны 231, показанной на ФИГ. 4) для передачи сигнала команды продолжения выполнения или сигнала остановки выполнения в контроллер 17 следования по маршруту и генератор 18 целевой скорости транспортного средства (ими в качестве альтернативы могут быть контроллер 19 угла поворота и контроллер 20 скорости транспортного средства) и осуществляет связь с антеннами 24 и 24, предусмотренными в транспортном средстве V. Для режима дистанционного выезда требуется переключатель пуска/остановки для системы приведения в движение (двигателя внутреннего сгорания или электродвигателя) рассматриваемого транспортного средства V, переключатель ввода для ввода режима дистанционного выезда и дисплей для отображения изображения, включающего в себя место выезда, и поэтому предпочтительно конфигурировать устройство 23 дистанционного управления, используя портативный компьютер с такими функциями.
[0027]
При использовании только режима дистанционного въезда достаточно, чтобы устройство 23 дистанционного управления передавало по меньшей мере сигнал команды в отношении того, следует ли продолжить или остановить выполнение автономного управления парковкой; поэтому, например, беспроводной ключ блокировки/разблокировки, снабженный кнопкой выполнения/остановки, может использоваться для такого сигнала команды. Телекоммуникационная сеть может использоваться в качестве средства для передачи сигнала команды продолжения выполнения или сигнала остановки выполнения от устройства 23 дистанционного управления в контроллер 17 следования по маршруту и генератор 18 целевой скорости транспортного средства (ими в качестве альтернативы могут быть контроллер 19 угла поворота и контроллер 20 скорости транспортного средства). Процесс сопряжения (процесс, в котором рассматриваемое транспортное средство V аутентифицирует устройство 23 дистанционного управления на прием команды) выполняется через функцию связи ближнего действия между устройством 23 дистанционного управления и бортовым устройством (контроллер 17 следования по маршруту и генератор 18 целевой скорости транспортного средства) рассматриваемого транспортного средства V, и только при аутентификации устройства 23 дистанционного управления рассматриваемое транспортное средство V принимает сигнал команды продолжения выполнения или сигнал остановки выполнения.
[0028]
В частности, система 1 дистанционной парковки согласно одному или нескольким вариантам осуществления настоящего изобретения включает в себя устройство 22 отображения рисунка и устройство 21 установки отображаемого на поверхности дороги рисунка. Устройство 22 отображения рисунка отображает один или более видимых рисунков на поверхности дороги. Когда блок 13 обнаружения объекта обнаруживает объект, устройство 21 установки отображаемого на поверхности дороги рисунка управляет устройством 22 отображения рисунка так, чтобы один или несколько предопределенных рисунков, соответствующих диапазону обнаружения для объекта, отображались в соответствующих определенных положениях на поверхности дороги по направлению к упомянутому диапазону обнаружения.
[0029]
Устройство 22 отображения рисунка состоит из светодиодного осветительного устройства, устройства облучения лазерным светом или подобного и излучает видимый свет по направлению к поверхности дороги в окружении рассматриваемого транспортного средства V. Как показано на ФИГ. 2, например, устройство 22 отображения рисунка, состоящее из светодиодного осветительного устройства, устройства облучения лазерным светом или подобного, может быть прикреплено в положении непосредственной близости от каждого из блоков 13a - 13h обнаружения объектов, чтобы соответствовать им. ФИГ. 2 представляет собой вид сверху, показывающий пример состояния, в котором устройства 22a - 22h отображения рисунков прикреплены к рассматриваемому транспортному средству V. В этом примере устройства 22a - 22h отображения рисунков прикреплены в непосредственной близости к вышеописанным блокам 13a - 13h обнаружения объектов, размещенным на восьми участках в центре 22a и с обеих сторон 22b и 22c переднего бампера, центре 22d и с обеих сторон 22e и 22f заднего бампера, а также на внешних порогах 22g и 22h под правой и левой центральными стойками. Участки, к которым прикрепляются устройства 22 отображения рисунков, и количество таких участков, как показано на ФИГ. 2, представляют лишь пример, и устройства 22 отображения рисунков также могут быть прикреплены к другим участкам, которые на этой фигуре не показаны. Количество участков, к которым прикрепляются устройства 22 отображения рисунков, также может быть меньше восьми, или девять или больше. Дополнительно или альтернативно, светодиодные осветительные устройства могут быть предусмотрены по всей окружности рассматриваемого транспортного средства V, и отображение может выполняться таким образом, что окружение рассматриваемого транспортного средства V разделяется на одинаковые сегменты.
[0030]
Верхние и нижние схемы на ФИГ. 3 являются схемами, показывающими примеры рисунков P, высвечиваемых на поверхности дороги устройствами 22 отображения рисунков, которые предусмотрены в восьми участках, как описано выше. Пример, показанный на верхней схеме ФИГ. 3 представляет собой пример, в котором рисунки представляют соответствующие диапазоны обнаружения блоков 13a - 13h обнаружения объектов, а пример, показанный на нижней схеме ФИГ. 3, представляет собой пример, в котором отображаются графические изображения. Рисунки P, показанные на верхней и нижней схемах ФИГ. 3 представляют рисунки, которые высвечиваются устройствами 22 отображения рисунков с максимальными площадями. Как будет описано ниже, устройство 21 установки отображаемого на поверхности дороги рисунка может изменять область отображения каждым устройством 22 отображения рисунка и может включать/выключать любое устройство 22 отображения рисунка.
[0031]
Устройство 21 установки отображаемого на поверхности дороги рисунка устанавливает каждый рисунок P видимого света, отображаемого устройством 22 отображения рисунка. Когда рисунок P видимого света отображается, предопределенный рисунок P, соответствующий диапазону обнаружения блока 13 обнаружения объекта, для объекта отображается в определенном положении на поверхности дороги по направлению к упомянутому диапазону обнаружения. Здесь будут описаны примеры формы отображения рисунков P, которые устанавливаются устройством 21 установки отображаемого на поверхности дороги рисунка. Все примеры формы отображения подпадают под признак настоящего изобретения «отображение предопределенного рисунка P, соответствующего диапазону обнаружения, для объекта в определенном положении на поверхности дороги по направлению к упомянутому диапазону обнаружения».
[0032]
«Первый пример формы отображения»
ФИГ. 5A - 5D представляют собой виды сверху, показывающие пример формы отображения, в котором рисунки P отображаются соответствующими устройствами 22a - 22h отображения рисунков в определенных положениях на поверхности дороги по направлению к диапазонам обнаружения блоков 13a - 13h обнаружения объектов во время выполнения не только автономного управления парковкой в режиме дистанционного въезда, как показано на ФИГ. 9A - 9D, но и общего автономного управления движением. На ФИГ. 5A - 5D предполагается, что рассматриваемое транспортное средство V движется вправо, а человек H, являющийся объектом, стоит на месте. Предполагается также, что блоки 13 обнаружения объектов и устройства 22 отображения рисунков прикреплены так, как показано на ФИГ. 2, а ссылочные позиции 13a - 13h и 22a - 22h на этих фигурах опущены. В этом случае рисунки P, когда никакой объект не обнаруживается блоками 13 обнаружения объектов, имеют области, коррелирующие с соответствующими диапазонами обнаружения блоков 13 обнаружения объектов, в то время как область отображения рисунка P делают меньше по мере уменьшения расстояния между рассматриваемым транспортным средством V и обнаруживаемым объектом (здесь человеком H).
[0033]
В состоянии, показанном на ФИГ. 5A, ни один из восьми блоков 13a - 13h обнаружения объектов, прикрепленных к рассматриваемому транспортному средству V, не обнаруживает человека H в качестве объекта, и поэтому рисунки P, высвечиваемые на поверхности дороги восемью устройствами 22a - 22h отображения рисунков, устанавливаются в рисунки, имеющие области, которые коррелируют с соответствующими диапазонами обнаружения блоков 13 обнаружения объектов. Здесь область, коррелирующая с диапазоном обнаружения блока 13 обнаружения объекта, относится к той же самой области, что и диапазон обнаружения блока 13 обнаружения объекта, а также к области, схожей с диапазоном обнаружения блока 13 обнаружения объекта. С другой стороны, когда рассматриваемое транспортное средство V движется вправо и въезжает в состояние, показанное на ФИГ. 5B, блок 13c обнаружения объекта, прикрепленный к левой передней части рассматриваемого транспортного средства V, обнаруживает человека H в качестве объекта, и поэтому область рисунка P, отображаемого устройством 22c отображения рисунка, соответствующим блоку 13c обнаружения объекта, делается меньшей, чем области рисунков P, отображаемых другими устройствами отображения рисунков (эта операция может включать в себя выключение устройства 22c отображения рисунка).
[0034]
Когда рассматриваемое транспортное средство V движется еще дальше вправо и въезжает в состояние, показанное на ФИГ. 5C, блок 13h обнаружения объекта, прикрепленный к левой боковой части рассматриваемого транспортного средства V, обнаруживает человека H в качестве объекта, и поэтому область рисунка P, отображаемого устройством 22h отображения рисунка, соответствующим блоку 13h обнаружения объекта, делается меньшей, чем области рисунков P, отображаемых другими устройствами отображения рисунков (эта операция может включать в себя выключение устройства 22h отображения рисунка). В это время область рисунка P, отображаемого устройством 22c отображения рисунка, которая была ранее уменьшена, возвращается в исходную область. Когда рассматриваемое транспортное средство V движется еще дальше вправо и въезжает в состояние, показанное на ФИГ. 5D, блок 13f обнаружения объекта, прикрепленный к левой задней части рассматриваемого транспортного средства V, обнаруживает человека H в качестве объекта, и поэтому область рисунка P, отображаемого устройством 22f отображения рисунка, соответствующим блоку 13f обнаружения объекта, делается меньшей, чем области рисунков P, отображаемых другими устройствами отображения рисунков (эта операция может включать в себя выключение устройства 22f отображения рисунка). В это время область рисунка P, отображаемого устройством 22h отображения рисунка, которая была ранее уменьшена, возвращается в исходную область.
[0035]
Таким образом, как показано на ФИГ. 5A - 5D последовательно, когда рассматриваемое транспортное средство V проезжает мимо человека H, отображение устройством 22 отображения рисунка, соответствующим блоку 13 обнаружения объекта, обнаруживающему человека H, выполняется в определенном положении на поверхности дороги по направлению к диапазону обнаружения так, чтобы обеспечивать предопределенный рисунок P, соответствующий диапазону обнаружения, для человека H. В примере, показанном на фигурах, область рисунка уменьшается, чтобы не включать в себя обнаруженного человека H. Благодаря этой операции человек H, присутствующий в окружении рассматриваемого транспортного средства V, может визуально распознавать рисунок P, отображаемый на поверхности дороги, и размер этого рисунка P, тем самым распознавая, что рассматриваемое транспортное средство V обнаруживает человека H, то есть человек H не входит в диапазон, в котором рассматриваемое транспортное средство V движется автономно, то есть рассматриваемое транспортное средство V не входит в контакт с человеком H.
[00366]
«Второй пример формы отображения»
ФИГ. 6 представляет собой вид сверху, показывающий другой пример формы отображения, в котором рисунки P отображаются соответствующими устройствами 22a - 22h отображения рисунков в определенных положениях на поверхности дороги по направлению к диапазонам обнаружения блоков 13a - 13h обнаружения объектов в ситуации, аналогичной ситуациям, показанным на ФИГ. 5A - 5D. В примере формы отображения, показанном на ФИГ. 5A-5D, диапазон обнаружения изменяется только для устройства отображения рисунка, соответствующего блоку 13 обнаружения объекта, обнаруживающему человека H, но в примере формы отображения, показанном на ФИГ. 6, когда объект, например человек H, обнаруживается, предопределенный рисунок P, соответствующий диапазону обнаружения, отображается не только в определенном положении на поверхности дороги по направлению к человеку H, но также и в положении, в которое человек H выполняет относительное перемещение впоследствии. То есть, как показано на ФИГ. 6, когда рассматриваемое транспортное средство V движется вправо, а человек H стоит на месте, человек H обнаруживается блоком 13c обнаружения объекта в текущем положении рассматриваемого транспортного средства V, и, следовательно, область рисунка P от устройства 22c отображения рисунка, соответствующего блоку 13c обнаружения объекта, уменьшается. В дополнение к этому, рассматриваемое транспортное средство V после этого движется еще дальше вправо, и, следовательно, человек H должен быть обнаружен блоком 13h обнаружения объекта. Соответственно, эта ситуация прогнозируется, и область рисунка P от устройства 22h отображения рисунка, соответствующего блоку 13h обнаружения объекта, который должен будет обнаружить человека H впоследствии, также уменьшается в то же самое время.
[0037]
С этой целью устройство 21 установки отображаемого на поверхности дороги рисунка вычисляет скорость движения объекта по временному изменению положения объекта, обнаруженного блоком 13 обнаружения объекта, и принимает скорость рассматриваемого транспортного средства V, генерируемую генератором 18 целевой скорости транспортного средства, для вычисления относительной скорости движения между объектом и рассматриваемым транспортным средством V. Затем, исходя из текущего положения рассматриваемого транспортного средства V, вычисляется положение, в которое объект переместится впоследствии, и выполняется определение того, какой блок 13 обнаружения объекта выполняет обнаружение в этом положении. Таким образом, рисунок P, отображаемый на поверхности дороги, изменяется не только для объекта, обнаруживаемого в текущем положении рассматриваемого транспортного средства V, но также и для объекта, который будет обнаружен впоследствии. Человек H, который это визуально распознает, может визуально распознавать рисунок P, отображаемый на поверхности дороги, а также размер и положение рисунка P, чтобы тем самым распознать, что рассматриваемое транспортное средство V обнаруживает человека H, то есть человек H не включен в диапазон, в котором рассматриваемое транспортное средство V движется автономно, то есть рассматриваемое транспортное средство V не входит в контакт с человеком H, вплоть до последующей ситуации.
[00388]
«Третий пример формы отображения»
ФИГ. 7 представляет собой вид сверху, показывающий еще один другой пример формы отображения, в котором рисунки P отображаются соответствующими устройствами 22a - 22h отображения рисунков в определенных положениях на поверхности дороги по направлению к диапазонам обнаружения блоков 13a - 13h обнаружения объектов в сцене выполнения автономного управления движением, например, в режиме автономной парковки. В примерах формы отображения, показанных на ФИГ. 5A - 5D и ФИГ. 6, предопределенные рисунки P, соответствующие диапазонам обнаружения, отображаются с использованием всех устройств 22 отображения рисунков, которые включают в себя устройство отображения рисунка, соответствующее блоку 13 обнаружения объекта, обнаруживающему человека H, и устройство отображения рисунка, соответствующее блоку 13 обнаружения объекта, который, как ожидается, будет обнаруживать этого человека H впоследствии, но в этом примере один или несколько предопределенных рисунков P, соответствующих диапазону обнаружения, отображаются на поверхности дороги с использованием одного или нескольких конкретных устройств 22 отображения рисунков.
[0039]
Например, когда блоки 13a - 13h обнаружения объектов обнаруживают два или более объекта, устройство 21 установки отображаемого на поверхности дороги рисунка считывает скорость движения рассматриваемого транспортного средства V из генератора 18 целевой скорости транспортного средства, вычисляет время до столкновения собственно до столкновения рассматриваемого транспортного средства с каждым из обнаруживаемых объектов и отображает только предопределенный рисунок P для объекта, имеющего наименьшее время до столкновения, в некотором положении на поверхности дороги по направлению к этому объекту, используя устройство 22 отображения рисунка, соответствующее блоку 13 обнаружения объекта, для этого объекта. Это будет описано более конкретно. Как показано на ФИГ. 7, когда два человека H1 и H2 присутствуют в окружении рассматриваемого транспортного средства V и рассматриваемое транспортное средство V паркуется задним ходом по маршруту R парковки, рассматриваемое транспортное средство V отдаляется от человека H2 при одновременном приближении к человеку H1. Соответственно, объектом, имеющим наименьшее время до столкновения для рассматриваемого транспортного средства V, является человек H1, обнаруживаемый блоком 13d обнаружения объекта, а не человек H2. Следовательно, устройство 22d отображения рисунка, соответствующее блоку 13d обнаружения объекта, используется для отображения рисунка P для диапазона обнаружения на поверхности дороги по направлению к человеку H1. Посредством этой операции человек H1 может визуально распознавать рисунок P, отображаемый на поверхности дороги, а также размер и положение рисунка P, чтобы тем самым распознать, что рассматриваемое транспортное средство V обнаруживает человека H1, то есть человек H1 не включен в диапазон, в котором рассматриваемое транспортное средство V движется автономно, то есть рассматриваемое транспортное средство V не входит в контакт с человеком H1.
[0040]
В этом примере оператор U, который вышел из транспортного средства, управляет устройством 23 дистанционного управления, тем самым выполняя автономное управление парковкой рассматриваемого транспортного средства V. Устройство 21 установки отображаемого на поверхности дороги рисунка считывает положение устройства 23 дистанционного управления из блока 14 определения положения для устройства 23 дистанционного управления. Когда блок 13 обнаружения объекта обнаруживает объект или человека H1 согласно данному раскрытию, предопределенный рисунок P отображается по направлению к человеку H1, как описано выше, и в то же самое время рисунок Pu, соответствующий предопределенному рисунку P, отображаемому по направлению к человеку H1, также отображается в определенном положении на поверхности дороги по направлению к устройству 23 дистанционного управления с использованием устройства 22а отображения рисунка, так что рисунок Pu является видимым. Такая операция позволяет оператору U распознавать присутствие объекта (человека H1), даже когда человек H1 стоит в положении, которое является мертвой зоной для оператора U.
[0041]
В приведенных выше примерах, когда блок 13 обнаружения объекта обнаруживает объект, предопределенный рисунок, отображаемый по направлению к объекту, уменьшается до рисунка, который не включает в себя этот объект, и уменьшенный рисунок отображается, но цвет этого предопределенного рисунка P, отображаемого по направлению к объекту, может быть установлен в цвет, отличный от цвета предопределенного рисунка P, отображаемого, когда никакой объект не обнаруживается. Дополнительно или в качестве альтернативы, при обнаружении объекта, мигающий шаблон предопределенного рисунка P, отображаемого по направлению к объекту, может быть установлен в мигающий шаблон, отличный от мигающего шаблона предопределенного рисунка P, отображаемого, когда никакой объект не обнаруживается.
[0042]
Вышеупомянутые примеры формы отображения обрабатываются устройством 22 отображения рисунка, которое управляется устройством 21 установки отображаемого на поверхности дороги рисунка, но любой из этих примеров формы отображения может быть обработан устройством 21 установки отображаемого на поверхности дороги рисунка. Дополнительно или альтернативно, устройство 23 дистанционного управления может быть снабжено переключателем для выбора формы отображения, обрабатываемой устройством 21 установки отображаемого на поверхности дороги рисунка, чтобы оператор U мог выбирать форму отображения, например, во время дистанционного управления. Дополнительно или альтернативно, при отображении рисунка P устройством 22 отображения рисунка, когда обнаруженным объектом является человек H, устройство 21 установки отображаемого на поверхности дороги рисунка может продолжать отображать рисунок в течение предопределенного времени даже после того, как рассматриваемое транспортное средство V останавливается. Дополнительно или альтернативно, когда обнаруженным объектом является человек H, может отображаться другой рисунок, информирующий о том, что рассматриваемое транспортное средство V замедляется и останавливается, даже если человек H находится вдали от рассматриваемого транспортного средства V.
[0043]
Далее будет описана последовательность операций управления системой 1 дистанционной парковки согласно одному или нескольким вариантам осуществления настоящего изобретения со ссылкой на ФИГ. 8. Здесь будет описана сцена, в которой парковка задним ходом, показанная на ФИГ. 9A - 9D, выполняется с помощью дистанционного управления автономной парковкой. Сначала, как показано на ФИГ. 9A, когда рассматриваемое транспортное средство V прибывает в окрестности парковочных мест, на этапе S1 оператор U, например водитель, включает переключатель запуска дистанционной парковки бортового устройства 11 установки целевого парковочного места для выбора режима дистанционного въезда. На этапе S2 устройство 11 установки целевого парковочного места осуществляет поиск одного или нескольких доступных парковочных мест для рассматриваемого транспортного средства V, используя множество бортовых камер или подобное. На этапе S3 устройство 11 установки целевого парковочного места определяет, имеется ли одно или несколько доступных парковочных мест. Когда имеется одно или несколько доступных парковочных мест, процесс переходит на этап S4, а когда никаких доступных парковочных мест нет, процесс возвращается на этап S1. Когда на этапе S2 доступных парковочных мест не обнаружено, оператор может быть проинформирован об этом факте с помощью языкового отображения или голоса, например, «парковочные места отсутствуют», и этот процесс может быть завершен.
[0044]
На этапе S4 устройство 11 установки целевого парковочного места управляет бортовым дисплеем для отображения доступных парковочных мест PS1, PS2 и PS3 и побуждает оператора U выбирать желаемое парковочное место. Когда оператор U выбирает конкретное парковочное место PS1 в качестве целевого парковочного места, устройство 11 установки целевого парковочного места выводит информацию о целевом парковочном положении в генератор 15 парковочного маршрута. На этапе S5 генератор 15 парковочного маршрута генерирует парковочные маршруты R1 и R2, показанные на ФИГ. 9B - 9D, на основе текущего положения рассматриваемого транспортного средства V и целевого парковочного положения, и вычислитель 16 замедления до объекта вычисляет момент начала замедления при автономном управлении парковкой на основе информации об объекте, обнаруженной блоком 13 обнаружения объекта. Парковочные маршруты, генерируемые генератором 15 парковочного маршрута, выводятся в контроллер 17 следования по маршруту, а момент времени начала замедления, вычисляемый вычислителем 16 замедления до объекта, выводится в генератор 18 целевой скорости транспортного средства.
[0045]
Благодаря описанным выше процессам автономное управление парковкой переходит в состояние ожидания. Когда оператору U предлагается принять запуск автономного управления парковкой, а затем он этот запуск принимает, автономное управление парковкой запускается. При парковке задним ходом, показанной на ФИГ. 9A, когда транспортное средство движется вперед из текущего положения, показанного на ФИГ. 9A, и достигает положения поворота для парковки, показанного на ФИГ. 9B, оператору U на этапе S6 предлагается выйти из транспортного средства. Затем, как показано на ФИГ. 9C, транспортное средство движется назад, поворачивая влево, и движется прямо в парковочное место PS1, показанное на ФИГ. 9D.
[0046]
Когда оператор U выходит на этапе S6 с устройством 23 дистанционного управления во время исполнения такого автономного управления парковкой, оператор U активирует на этапе S7 устройство 23 дистанционного управления. Рассматриваемое транспортное средство V находится в состоянии остановки во время этапов с S6 по S9. На этапе S8 выполняется процесс сопряжения между устройством 23 дистанционного управления и рассматриваемым транспортным средством V. Когда процесс сопряжения позволяет рассматриваемому транспортному средству V аутентифицировать устройство 23 дистанционного управления, чтобы команда могла быть принята, дистанционное управление запускается на этапе S9, и оператор U продолжает нажимать кнопку выполнения устройства 23 дистанционного управления, тем самым поддерживая выполнение дистанционного управления парковкой. С другой стороны, когда оператор U нажимает кнопку остановки устройства 23 дистанционного управления (или отпускает кнопку выполнения), команда остановки для дистанционного управления парковкой передается в контроллер 17 следования по маршруту и генератор 18 целевой скорости транспортного средства (ими в качестве альтернативы могут быть контроллер 19 угла поворота и контроллер 20 скорости транспортного средства), и дистанционное управление парковкой приостанавливается. В случае, когда безопасность подтверждается во время приостановки дистанционного управления парковкой, или в других подобных случаях, оператор U продолжает снова нажимать кнопку выполнения устройства 23 дистанционного управления и, таким образом, выполнение дистанционного управления парковкой возобновляется.
[0047]
Когда оператор U выходит из транспортного средства и продолжает нажимать кнопку выполнения устройства 23 дистанционного управления, контроллер 17 следования по маршруту последовательно выводит целевой угол поворота по парковочным маршрутам R1 и R2 в контроллер 19 угла поворота, а генератор 18 целевой скорости транспортного средства последовательно выводит целевую скорость транспортного средства по парковочным маршрутам R1 и R2 в контроллер 20 скорости транспортного средства. Это позволяет рассматриваемому транспортному средству V выполнять автономное управление парковкой по парковочным маршрутам R1 и R2 с целевой скоростью транспортного средства. Во время этой операции блок 13 обнаружения объекта обнаруживает на этапе S10 присутствие или отсутствие объекта, такого как человек H или препятствие W, которые имеются в окружении рассматриваемого транспортного средства V. Когда объект обнаруживается на этапе S11, процесс переходит на этап S12, в то время как, когда объект не обнаруживается, процесс переходит на этап S15. Процессы с этапа S10 по этап S16, которые будут описаны ниже, выполняются с предопределенными временными интервалами до тех пор, пока рассматриваемое транспортное средство V не прибудет в целевое парковочное место на этапе S16.
[0048]
Процессы с этапа S12 по этап S15 выполняются в соответствии с вышеописанными примерами формы отображения рисунков P, которые устанавливаются устройством 21 установки отображаемого на поверхности дороги рисунка. Это будет описано более конкретно. На этапе S12 устройство 21 установки отображаемого на поверхности дороги рисунка определяет положение устройства 23 дистанционного управления, удерживаемого оператором U. Команда продолжения выполнения для дистанционного управления от устройства 23 дистанционного управления к рассматриваемому транспортному средству V выдается через связь ближнего действия от антенны 231 устройства 23 дистанционного управления к антеннам 24 и 24 транспортного средства V; поэтому датчики интенсивности радиополя, предусмотренные в рассматриваемом транспортном средстве V, используются для обнаружения интенсивностей радиополей между антеннами 24 и 24 транспортного средства V и антенной 231 устройства дистанционного управления, и положение устройства 23 дистанционного управления вычисляется с использованием метода триангуляции или подобного. Положения, к которым прикрепляют антенны 24 и 24 транспортного средства, и расстояния между антеннами известны, поэтому можно вычислить относительное положение устройства 23 дистанционного управления по отношению к рассматриваемому транспортному средству V. В описанном выше третьем примере формы отображения (ФИГ. 7) рисунок Pu отображается посредством блока 22a отображения рисунка в определенном положении на поверхности дороги по направлению к устройству 23 дистанционного управления от рассматриваемого транспортного средства V, а положение устройства 23 дистанционного управления следовательно определяется на этапе S12. Если рисунки P отображаются независимо от положения устройства 23 дистанционного управления, как в других примерах формы отображения, этап S12 может быть пропущен.
[0049]
На этапе S13 устройство 21 установки отображаемого на поверхности дороги рисунка вычисляет время до столкновения собственно до столкновения рассматриваемого транспортного средства V с объектом, таким как препятствие, обнаруженным блоком 13 обнаружения объекта. Расстояние до препятствия определяется блоком 13 обнаружения объекта, и целевая скорость транспортного средства генерируется генератором 18 целевой скорости транспортного средства; поэтому время TTC до столкновения рассматриваемого транспортного средства V с объектом вычисляется на основе этих информационных элементов. В описанном выше третьем примере формы отображения (ФИГ. 7) рисунок P диапазона обнаружения, соответствующего человеку H1, имеющему наименьшее время TTC до столкновения транспортного средства с объектом, отображается на поверхности дороги с использованием устройства 22d отображения рисунка, и поэтому время до столкновения TTC вычисляется на этапе S13. Если рисунки P отображаются независимо от времени до столкновения TTC до столкновения транспортного средства с объектом, как в других примерах формы отображения, этап S13 может быть пропущен.
[0050]
На этапе S14 устройство 21 установки отображаемого на поверхности дороги рисунка управляет устройством 22 отображения рисунка для отображения рисунка P, соответствующего диапазону обнаружения для объекта, в определенном положении на поверхности дороги по направлению к упомянутому диапазону обнаружения. Рисунок, соответствующий диапазону обнаружения для объекта, упоминаемый в настоящем документе, предназначен для охвата любого из вышеописанных примеров с первого примера формы отображения по третий пример формы отображения. Другими словами примеры отображения рисунка включают в себя случай, в котором, как в первом примере формы отображения (ФИГ. 5A - 5D), когда рассматриваемое транспортное средство V проезжает мимо человека H, отображение устройством 22 отображения рисунка, соответствующим блоку 13 обнаружения объекта, обнаруживающему человека H, выполняется в определенном положении на поверхности дороги по направлению к диапазону обнаружения так, чтобы обеспечивать предопределенный рисунок P, соответствующий диапазону обнаружения для человека H. В примере, показанном на фигурах, область рисунка уменьшается, чтобы не включать в себя обнаруженного человека H. Примеры отображения рисунка также включают в себя случай, в котором, как во втором примере формы отображения (ФИГ. 6), когда объект, например человек H, обнаруживается, предопределенный рисунок P, соответствующий диапазону обнаружения, отображается не только в определенном положении на поверхности дороги по направлению к человеку H, но также и в положении, в которое человек H выполняет относительное перемещение впоследствии. Примеры отображения рисунка также включают в себя случай, в котором, как и в третьем примере формы отображения (ФИГ. 7), только предопределенный рисунок P для объекта (человека H1), имеющего наименьшее время до столкновения, отображается в определенном положении на поверхности дороги по направлению к объекту (человеку H1) с использованием устройства 22d отображения рисунка, соответствующего блоку 13d обнаружения объекта, для объекта. Примеры отображения рисунка также включают в себя случай, в котором, как в третьем примере формы отображения (ФИГ. 7), рисунок Pu, соответствующий предопределенному рисунку P, отображаемому по направлению к человеку H1, также отображается в определенном положении на поверхности дороги по направлению к устройству 23 дистанционного управления с использованием устройства 22а отображения рисунка, так что рисунок Pu является видимым.
[0051]
В сцене с ФИГ. 9A, два человека H1 и H2 стоят в окружении рассматриваемого транспортного средства V, но эти люди H1 и H2 не обнаруживаются блоками 13 обнаружения объектов; поэтому устройство 21 установки отображаемого на поверхности дороги рисунка устанавливает рисунки, отображаемые устройствами 22a - 22h отображения рисунков, соответствующими соответствующим блокам 13a - 13h обнаружения объектов, в рисунки, имеющие области, которые коррелируют с диапазонами обнаружения. В сцене, показанной на ФИГ. 9B, человек H обнаруживается блоком 13b обнаружения объекта; следовательно, рисунок P, отображаемый устройством 22b отображения рисунка, соответствующим блоку 13b обнаружения объекта, уменьшается или выключается. Аналогично, в сцене, показанной на ФИГ. 9C, человек H обнаруживается блоком 13h обнаружения объекта; следовательно, рисунок P, отображаемый устройством 22h отображения рисунка, соответствующим блоку 13h обнаружения объекта, уменьшается или выключается. Аналогично, в сцене, показанной на ФИГ. 9D, человек H обнаруживается блоком 13c обнаружения объекта; следовательно, рисунок P, отображаемый устройством 22c отображения рисунка, соответствующим блоку 13c обнаружения объекта, уменьшается или выключается.
[0052]
Когда никакой объект не обнаруживается блоками 13a - 13h обнаружения объектов, на этапе S15 устройство 21 установки отображаемого на поверхности дороги рисунка устанавливает рисунки, отображаемые устройствами 22a - 22h отображения рисунков, соответствующими соответствующим блокам 13a - 13h обнаружения объектов, в рисунки, имеющие области, которые коррелируют с диапазонами обнаружения. Определение, производимое на этапе S11, выполняется для каждого из блоков 13a - 13h обнаружения объектов, и отображение рисунков P на этапах S14 и S15 для этого определения также выполняется устройствами 22a - 22h отображения рисунков, соответствующими соответствующим блокам 13a - 13h обнаружения объектов.
[0053]
На этапе S16 выполняется определение, прибыло ли рассматриваемое транспортное средство V в целевое парковочное место. Когда рассматриваемое транспортное средство V не прибыло, процесс возвращается на этап S10, в то время как, когда рассматриваемое транспортное средство V прибыло в целевое парковочное место, вышеупомянутое автономное управление парковкой завершается.
[0054]
Как описано выше, согласно системе 1 дистанционной парковки в одном или нескольких вариантах осуществления настоящего изобретения, когда автономное управление движением выполняется для рассматриваемого транспортного средства V, имеющего функцию автономного управления движением, выполняется поиск, присутствует ли объект, такой как человек H, в окружении рассматриваемого транспортного средства V. Когда объект обнаруживается, предопределенный рисунок, соответствующий диапазону обнаружения, отображается в определенном положении на поверхности дороги по направлению к упомянутому диапазону обнаружения. Посредством этой операции человек H, присутствующий в окружении рассматриваемого транспортного средства V, может визуально распознавать рисунок P, отображаемый на поверхности дороги, а также размер и положение рисунка P, чтобы тем самым распознать, что рассматриваемое транспортное средство V обнаруживает человека H, то есть человек H не включен в диапазон, в котором рассматриваемое транспортное средство V движется автономно, то есть рассматриваемое транспортное средство V не входит в контакт с человеком H.
[0055]
Согласно системе 1 дистанционной парковки в одном или нескольких вариантах осуществления настоящего изобретения, когда обнаруживается объект, такой как человек H, предопределенный рисунок, отображаемый по направлению к этому объекту, уменьшается до рисунка, который не включает в себя этот объект и этот уменьшенный рисунок отображается; следовательно, только визуально распознавая рисунок P, человек H может прочувствовать, что рассматриваемое транспортное средство V обнаруживает человека H, то есть человек H не включен в диапазон, в котором рассматриваемое транспортное средство V движется автономно, то есть, рассматриваемое транспортное средство V не входит в контакт с человеком H.
[0056]
Согласно системе 1 дистанционной парковки в одном или нескольких вариантах осуществления настоящего изобретения, когда обнаруживается объект, такой как человек H, цвет предопределенного рисунка, отображаемого по направлению к этому объекту, устанавливается в цвет, отличный от цвета предопределенного рисунка, отображаемого когда никакой объект не обнаруживается; следовательно, только визуально распознавая рисунок P, человек H может прочувствовать, что рассматриваемое транспортное средство V обнаруживает человека H, то есть человек H не включен в диапазон, в котором рассматриваемое транспортное средство V движется автономно, то есть, рассматриваемое транспортное средство V не входит в контакт с человеком H.
[0057]
Согласно системе 1 дистанционной парковки в одном или нескольких вариантах осуществления настоящего изобретения, когда обнаруживается объект, такой как человек H, мигающий шаблон предопределенного рисунка P, отображаемого по направлению к этому объекту, устанавливается мигающий шаблон, отличный от мигающего шаблона предопределенного рисунка, отображаемого когда никакой объект не обнаруживается; следовательно, только визуально распознавая рисунок P, человек H может прочувствовать, что рассматриваемое транспортное средство V обнаруживает человека H, то есть человек H не включен в диапазон, в котором рассматриваемое транспортное средство V движется автономно, то есть, рассматриваемое транспортное средство V не входит в контакт с человеком H.
[0058]
Согласно системе 1 дистанционной парковки в одном или нескольких вариантах осуществления настоящего изобретения, когда рассматриваемое транспортное средство V управляется для въезда в определенное место с помощью автономного управления движением или выезда из определенного места с помощью автономного управления движением на основе команды выполнения или команды остановки от устройства 23 дистанционного управления, расположенного за пределами рассматриваемого транспортного средства V, положение устройства 23 дистанционного управления определяется, и когда обнаруживается объект, такой как человек H, предопределенный рисунок P отображается по направлению к этому объекту и, в то же самое время, рисунок Pu, соответствующий упомянутому предопределенному рисунку P, отображается в определенном положении на поверхности дороги по направлению к устройству 23 дистанционного управления, так что рисунок Pu является видимым; следовательно, оператор U может распознать присутствие объекта (человека H1), даже когда человек H1 стоит в положении, которое находится в мертвой зоне для оператора U.
[0059]
Согласно системе 1 дистанционной парковки в одном или нескольких вариантах осуществления настоящего изобретения, когда обнаруживаются два или более объектов, определяется скорость движения рассматриваемого транспортного средства V, вычисляется время до столкновения TTC до столкновения рассматриваемого транспортного средства V с каждым из обнаруженных объектов, и предопределенный рисунок P только для объекта, имеющего наименьшее время до столкновения TTC, отображается в определенном положении на поверхности дороги по направлению к объекту; следовательно, только необходимая информация может быть отображена надлежащим образом, и только визуально распознавая рисунок P, человек H может распознать, что рассматриваемое транспортное средство V обнаруживает человека H, то есть человек H не включен в диапазон, в котором рассматриваемое транспортное средство V движется автономно, то есть, рассматриваемое транспортное средство V не входит в контакт с человеком H.
[0060]
Согласно системе 1 дистанционной парковки в одном или нескольких вариантах осуществления настоящего изобретения, когда обнаруживается объект, такой как человек H, определяется относительная скорость между рассматриваемым транспортным средством и объектом, положение, в которое объект выполняет относительное перемещение после определения относительной скорости, вычисляется на основе относительной скорости, и предопределенный рисунок P отображается в каждом из определенного положения на поверхности дороги по направлению к объекту и определенного положения на поверхности дороги по направлению к положению, в которое объект выполняет относительное перемещение; следовательно, человек H, который визуально распознает это, может визуально распознавать рисунок P, отображаемый на поверхности дороги, а также размер и положение рисунка P, тем самым распознавая, что рассматриваемое транспортное средство V обнаруживает человека H, то есть человек H не включен в диапазон, в котором рассматриваемое транспортное средство V движется автономно, то есть рассматриваемое транспортное средство V не входит в контакт с человеком H, вплоть до последующей ситуации.
[0061]
Вышеупомянутый контроллер 19 угла поворота и контроллер 20 скорости транспортного средства соответствуют контроллеру движения согласно настоящему изобретению, вышеупомянутое устройство 11 установки целевого парковочного места, генератор 15 парковочного маршрута, контроллер 17 следования по маршруту и генератор 18 целевой скорости транспортного средства соответствуют контроллеру согласно настоящему изобретению, а вышеупомянутое устройство 21 установки отображаемого на поверхности дороги рисунка и вышеупомянутый блок 14 определения положения для устройства 23 дистанционного управления соответствуют контроллеру отображения согласно настоящему изобретению.
[Описание позиционных обозначений]
[0062]
1 Система дистанционной парковки
11 Устройство установки целевого парковочного места
12 Блок определения положения транспортного средства
13 Блок обнаружения объекта
14 Блок определения положения для устройства дистанционного управления
15 Генератор парковочного маршрута
16 Вычислитель замедления до объекта
17 Контроллер следования по маршруту
18 Генератор целевой скорости транспортного средства
19 Контроллер угла поворота
20 Контроллер скорости транспортного средства
21 Устройство установки отображаемого на поверхности дороги рисунка
22 Устройство отображения рисунка
23 Устройство дистанционного управления
231 Антенна
24 Антенна
V Рассматриваемое транспортное средство
V1 - V6 Другие транспортные средства
P, Pu Подлежащий отображению рисунок
PS1, PS2, PS3 Парковочное место
S Место выезда
U Оператор
H, H1, H2 Человек (объект)
W Препятствие (объект)
Предложен способ управления движением транспортного средства для парковки. Управляют транспортным средством, имеющим функцию автономного управления движением, для выполнения автономного движения. Обнаруживают, присутствует ли объект в окружении транспортного средства, с использованием блока обнаружения объекта. При переходе из состояния отсутствия обнаружения объекта в состояние обнаружения объекта изменяют предопределенный рисунок, соответствующий диапазону обнаружения блока обнаружения объекта, на рисунок, отличный от рисунка, который отображался до этого момента. Причем предопределенный рисунок отображается в определенном положении на поверхности дороги по направлению к диапазону обнаружения, чтобы быть видимым. Предложено также устройство управления движением транспортного средства. Достигается повышение безопасности. 2 н. и 6 з.п. ф-лы, 16 ил.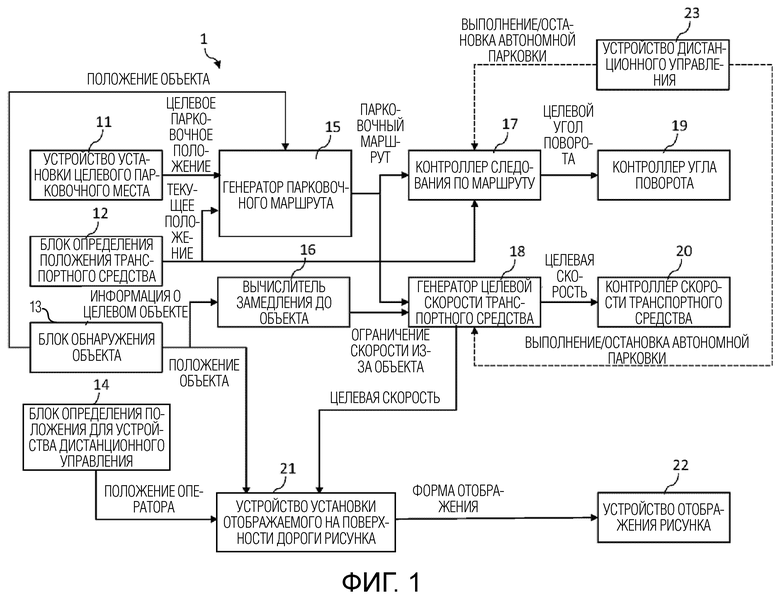
1. Способ управления движением транспортного средства, содержащий:
при управлении транспортным средством, имеющим функцию автономного управления движением, для выполнения автономного движения,
обнаружение, присутствует ли объект в окружении транспортного средства, с использованием блока обнаружения объекта; и
при переходе из состояния отсутствия обнаружения объекта в состояние обнаружения объекта, изменение предопределенного рисунка, соответствующего диапазону обнаружения блока обнаружения объекта, на рисунок, отличный от рисунка, который отображался до этого момента, причем предопределенный рисунок отображается в определенном положении на поверхности дороги по направлению к диапазону обнаружения, чтобы быть видимым.
2. Способ управления движением транспортного средства по п. 1, содержащий,
при обнаружении объекта, уменьшение предопределенного рисунка, отображаемого по направлению к объекту, до рисунка, который не включает этот объект, и отображение уменьшенного рисунка.
3. Способ управления движением транспортного средства по п. 1 или 2, содержащий,
при обнаружении объекта, установку цвета предопределенного рисунка, отображаемого по направлению к объекту, в цвет, отличающийся от цвета предопределенного рисунка, отображаемого, когда объект не обнаруживается.
4. Способ управления движением транспортного средства по п. 1 или 2, содержащий,
при обнаружении объекта, установку мигающего шаблона предопределенного рисунка, отображаемого по направлению к объекту, в мигающий шаблон, отличающийся от мигающего шаблона предопределенного рисунка, отображаемого, когда объект не обнаруживается.
5. Способ управления движением транспортного средства по п. 1 или 2, содержащий,
при управлении транспортным средством для выполнения автономного въезда в определенное место или выезда из него на основе команды выполнения или команды остановки от устройства дистанционного управления, расположенного за пределами транспортного средства,
определение положения устройства дистанционного управления; и
при обнаружении объекта, отображение предопределенного рисунка по направлению к объекту и одновременное отображение рисунка, соответствующего упомянутому предопределенному рисунку, в определенном положении на поверхности дороги по направлению к устройству дистанционного управления, так что упомянутый рисунок является видимым.
6. Способ управления движением транспортного средства по п. 1 или 2, содержащий:
при обнаружении двух или более объектов,
определение скорости движения транспортного средства;
вычисление времени до столкновения собственно до столкновения транспортного средства с каждым из обнаруженных объектов; и
отображение в определенном положении на поверхности дороги по направлению к объекту только предопределенного рисунка для объекта, имеющего наименьшее время до столкновения.
7. Способ управления движением транспортного средства по п. 1 или 2, содержащий:
при обнаружении объекта,
определение относительной скорости между транспортным средством и объектом;
вычисление на основе относительной скорости положения, в которое объект выполняет относительное перемещение после определения относительной скорости; и
отображение предопределенного рисунка в каждом из упомянутого определенного положения на поверхности дороги по направлению к объекту и определенного положения на поверхности дороги по направлению к положению, в которое объект выполняет относительное перемещение.
8. Устройство управления движением транспортного средства, содержащее:
контроллер движения, выполненный с возможностью управления транспортным средством, имеющим функцию автономного управления движением, для выполнения автономного движения;
контроллер, выполненный с возможностью вычисления маршрута движения транспортного средства и вывода команды движения в контроллер движения;
блок обнаружения объекта, выполненный с возможностью осуществления поиска, присутствует ли объект в окружении транспортного средства;
устройство отображения рисунка, выполненное с возможностью отображения видимого рисунка на поверхности дороги; и
контроллер устройства отображения, выполненный с возможностью управления устройством отображения рисунка, так что при переходе из состояния отсутствия обнаружения объекта в состояние обнаружения объекта предопределенный рисунок, соответствующий диапазону обнаружения блока обнаружения объекта, изменяется на рисунок, отличный от рисунка, который отображался до этого момента, причем предопределенный рисунок отображается в определенном положении на поверхности дороги по направлению к диапазону обнаружения, чтобы быть видимым.
| WO 2018092710 A1, 24.05.2018 | |||
| US 20080175012 A1, 24.07.2008 | |||
| ШНУР | 2002 |
|
RU2233356C2 |

