Изобретение относится к балансировочной технике и может быть использовано для статической и динамической балансировки изделия, оснащенного собственным приводом вращения относительно вертикальной оси.
Известен способ вертикальной динамической балансировки изделия с низкой частотой вращения (см. Справочник по балансировке / М.Е. Левит, Ю.А. Агафонов, Л.Д. Вайнгортин и др.; Под общ. ред. М.Е. Левита. - М: Машиностроение, 1992. С. 210-211). Способ реализуется с помощью устройства, содержащего литую тумбу, внутри которой расположен колебательный стол, связанный с неподвижным основанием упругими элементами-стержнями, образующими колебательную механическую систему дорезонансного типа. Ось шпинделя вертикальна. Балансируемое изделие крепят к вращающейся планшайбе, жестко соединенной с верхним фланцем шпинделя. Вращение шпинделя осуществляется от тиристорного регулируемого привода постоянного тока через ременную передачу. Между столом и неподвижным основанием установлены датчики динамических реакций, возникающих при вращении шпинделя с установленным изделием, с помощью которых определяются величины дисбаланса. В качестве преобразователей механических колебаний в электрические аналоговые сигналы применены параметрические датчики виброперемещений трансформаторного типа, соединенные тягами с корпусом шпинделя в плоскостях измерения системы шпиндель - изделие. Согласно известному способу изделие приводят во вращение на шпинделе колебательного стола и измеряют динамические реакции между столом и неподвижным основанием.
Недостатком известного способа является сравнительно низкая точность динамической балансировки. Низкая точность балансировки обусловлена принципиальной необходимостью измерений динамических реакций колебательной системы «планшайба + шпиндель + изделие», которая имеет сравнительно большую собственную инерционность, существенно влияющую на точность измеряемых параметров колебательного движения под действием малых центробежных сил, возникающих при вращении изделия с низкой частотой.
Известен способ вертикальной динамической балансировки изделия по патенту RU 2539810 C1 (G01M 1/16, 2015). Способ заключается в том, что изделие приводят во вращение на платформе, установленной на центральной шарнирной опоре на вращающемся столе, и измеряют динамические реакции между платформой и столом. Дополнительно измеряют динамические реакции между платформой и столом при измененном взаимном вертикальном положении шарнира центральной платформы и изделия. Способ реализуется с помощью устройства, содержащего корпус, установленный в нем вращающийся на подшипниках относительно вертикальной оси стол, размещенную на столе центральную шарнирную опору, состоящую из нижней и верхней частей, на которую опирается платформа для установки изделия. Платформа связана со столом посредством двух пар датчиков динамических реакций, возникающих при вращении стола с установленным изделием. Датчики расположены на одинаковом расстоянии от оси вращения. Электропитание оборудования, находящегося на вращающемся столе (датчиков, преобразователей), осуществляется с помощью автономных источников электропитания - аккумуляторов. Считывание измерительной информации от датчиков на вращающемся столе производится по беспроводной радиосвязи. Для подачи электропитания и передачи измерительной информации возможно также применение вращающихся трансформаторов и контактных кольцевых коллекторов.
Однако известный способ не предполагает возможности балансировки изделий, оснащенных собственным приводом вращения.
Наиболее близким по совокупности существенных признаков с заявляемым изобретением является способ для вертикальной балансировки, приведенный в книге «Технология сборки и испытаний космических аппаратов»: Учебник для высших технических учебных заведений / И.Т. Беляков, И.А. Зернов, Е.Г. Антонов и др.; Под общ. ред. И.Т. Белякова и И.А. Зернова. - М: Машиностроение, 1990. С. 211-213. Способ реализуется с помощью устройства, состоящего из корпуса и установленного в нем через аэростатические осевой и радиальный подшипники балансировочного устройства, на котором имеются центральная жесткая опора и четыре опоры с датчиками (силоизмерителями), измеряющими величины реакций опор. В плане (т.е. на виде сверху) центры датчиков расположены равномерно по окружности относительно вертикальной оси вращения, которая проходит через упомянутую центральную опору. На датчики устанавливается платформа с переходником, на который устанавливается балансируемое изделие. Система координат строится так, что начало их находится в вершине жесткой опоры платформы, а ось ОХ направлена вдоль оси изделия и оси балансировочного стенда. Расстояние от начала координат до каждого из четырех датчиков одинаковое и точно определено. После установки изделия и начала вращения платформа опирается на какие-то три точки, из которых одна известна - это центральная жесткая опора, две другие точки опоры зависят от инерционных свойств изделия.
Однако известный способ не позволяет производить статическую балансировку. Вместе с этим недостатком известного способа является недостаточная точность устранения динамического дисбаланса, так как он не позволяет определять в динамическом режиме и устранять статическую составляющую динамического дисбаланса. Кроме того, известный способ предполагает необходимость вращения балансировочного устройства, т.е. система измерений подвижна, что усложняет передачу измерительной информации и конструкцию балансировочного устройства. При этом специфические характеристики известного способа не отвечают изделиям, оснащенным собственным приводом вращения, т.е. способ имеет ограниченную область использования.
Проблема, решаемая настоящим изобретением, состоит в создании способа вертикальной динамической балансировки изделия, который обеспечивал бы возможность балансировки изделия посредством собственного привода вращения балансируемого изделия.
Указанная проблема решается тем, что в известном способе вертикальной динамической балансировки изделия, при котором изделие устанавливают на промежуточной платформе, затем изделие приводят во вращение и измеряют динамические реакции между промежуточной платформой и ее опорным основанием с помощью силоизмерителей, согласно изобретению изделие устанавливают посредством его опорно-поворотного устройства (ОПУ) в сборе с последним. При этом используют трехточечную схему опирания ОПУ на промежуточную платформу. Изделие во вращение приводят с помощью штатного привода вращения балансируемого изделия (т.е. с помощью собственного привода вращения ОПУ балансируемого изделия) при неподвижной промежуточной платформе, а динамические реакции между промежуточной платформой и опорным основанием измеряют с помощью неподвижных опор с силоизмерителями.
Вместе с этим при измерении динамических реакций между промежуточной платформой и опорным основанием в качестве силоизмерителей используют сило- и весоизмерительные тензометрические датчики.
Технический результат использования изобретения состоит в повышении эффективности процесса балансировки изделия за счет использования привода вращения ОПУ балансируемого изделия. Вместе с этим изобретение обеспечивает возможность осуществления статической балансировки изделия, что повышает точность балансировки в целом. Кроме того, статическая и динамическая балансировка изделия обеспечивается при неподвижной системе измерений, что существенно упрощает передачу измерительных данных.
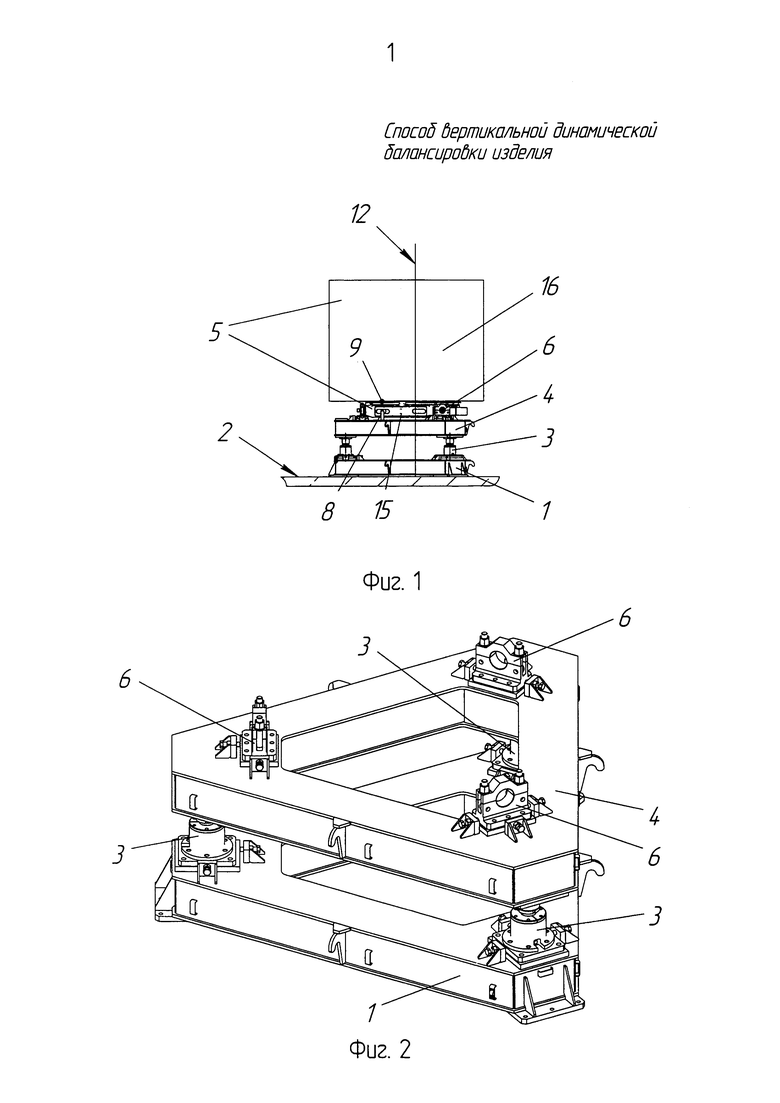
В варианте выполнения изобретения способ осуществляется с помощью устройства для вертикальной балансировки изделий, оснащенных собственным приводом вращения, которое содержит неподвижное опорное основание 1, выполненное с возможностью установки в фиксируемом положении на закладных частях подготовленной площадки 2. На опорном основании 1 размещены три шарнирные опоры 3, на которые опирается промежуточная платформа 4 для установки балансируемого изделия 5 в сборе (например, антенного поста). Промежуточная платформа снабжена тремя подцапфенниками 6, посадочные места которых отвечают посадочным местам изделия 5, а присоединительные элементы имитируют присоединительные элементы штатного рабочего места установки изделия (например, присоединительные элементы шасси самоходного транспортного средства). Благодаря этому при балансировке изделия обеспечивается максимальное приближение схемы, при которой изделие балансируют, к реальной схеме, при которой изделие эксплуатируют. Подцапфенники 6 выполнены быстроразъемными. Благодаря этому повышается удобство установки балансируемого изделия на промежуточной платформе 4 и достигается снижение трудоемкости процесса балансировки.
Устройство содержит систему измерений, включающую силоизмерители (сило- и весоизмерительные тензометрические датчики) 7, бесконтактный оптический датчик 8 оборотов со съемной светоотражающей меткой 9, которая выполнена с возможностью установки в фиксируемом положении на изделии 5, и средства для регистрации, обработки и отображения сигналов с упомянутых датчиков (на чертеже не показано). Бесконтактный оптический датчик 8 оборотов электрически связан с упомянутыми средствами для регистрации, обработки и отображения сигналов. Последние включают компьютер и программное обеспечение. В варианте осуществления изобретения датчик 8 представляет собой съемное устройство, устанавливаемое на промежуточной платформе 4. В качестве датчика 8 оборотов может быть использован, например, бесконтактный оптический датчик оборотов ДВО-02 с магнитной стойкой. В качестве силоизмерителя (датчика) 7 может быть использован, например, сило- и весоизмерительный тензометрический датчик М70К.
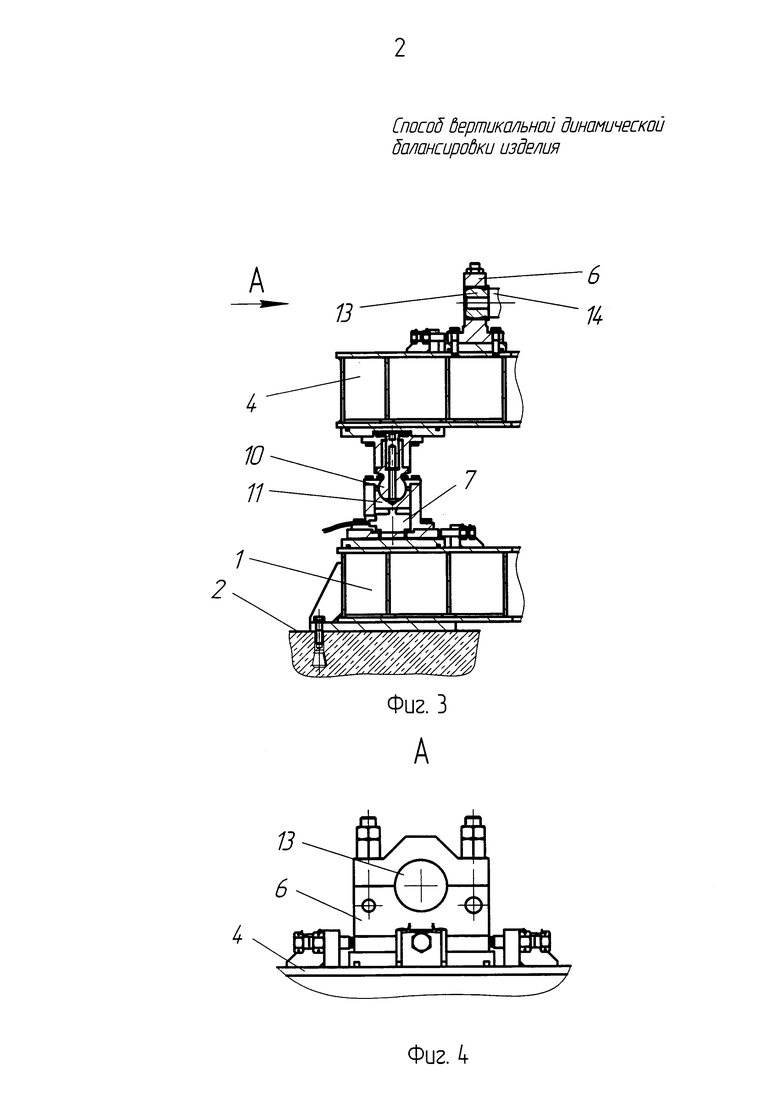
Каждая из опор 3 включает сферическую пяту 10 с подпятником 11, взаимодействующим с соответствующим сило- и весоизмерительным тензометрическим датчиком 7. В плане (т.е. на виде сверху) центры сферических пят расположены равномерно по окружности относительно вертикальной оси 12, которая в рабочем положении устройства (т.е. при установленном на платформе 4 изделии 5) геометрически совмещена с вертикальной осью вращения изделия 5. Таким образом в плане опоры 3 в рабочем положении устройства располагаются на одинаковом расстоянии от оси вращения изделия 5.
Каждый из подцапфенников 6 установлен на платформе 5 таким образом, что его продольная ось расположена горизонтально и лежит в вертикальной плоскости, проходящей через центр сферической пяты 10 соответствующей опоры 3 и вертикальную ось 12. Таким образом, подцапфенники 6 и опоры 3 попарно расположены в общих вертикальных плоскостях, проходящих через вертикальную ось 12. По существу в общих вертикальных плоскостях расположены датчики 7 и опоры изделия 5. В рабочем положении устройства каждый из подцапфенников 6 взаимодействует с ответной цапфой 13, смонтированной на основании 14 опорно-поворотного устройства (ОПУ) 15 балансируемого изделия 5.
В варианте осуществления изобретения способ используется для балансировки антенного поста, который включает ОПУ 15 и аппаратную кабину (аппаратный контейнер) 16, которые в сборе образуют транспортабельный модуль полной заводской готовности. Аппаратная кабина 16 установлена на поворотной части ОПУ 15 с возможностью вращения в горизонтальной плоскости (по азимуту). ОПУ 15 содержит электропривод вращения (на чертеже не показано) и основание 14. Электропривод вращения включает мотор-колесо. Основание 14 ОПУ выполнено с тремя опорными элементами (цапфами) 13, которые выполнены с возможностью образования разъемного соединения с ответными опорными элементами подвижного и/или стационарного объекта (например, самоходного шасси и/или вышки). На основании 14 смонтированы вращающееся токосъемное устройство и электроразъемы электрической связи с системой управления антенным постом и внешним источником электроснабжения (на чертеже не показано). Управление антенным постом осуществляется с помощью стенда управления (на чертеже не показано). Благодаря обеспечению возможности балансировки изделия в сборе достигается повышение точности балансировки.
На фиг. 1 схематично показано балансируемое изделие, установленное на балансировочном устройстве, общий вид; на фиг. 2 - устройство для вертикальной балансировки изделия, оснащенного собственным приводом вращения, общий вид; на фиг. 3 - шарнирная опора промежуточной платформы с вмонтированным сило- и весоизмерительным тензометрическим датчиком и подцапфенник, взаимодействующий со сферической цапфой балансируемого изделия, продольный разрез; на фиг. 4 - подцапфенник, установленный на промежуточной платформе, вид по А на фиг. 3.
В варианте осуществления изобретения предлагаемый способ вертикальной динамической балансировки изделия реализуется следующим образом.
Перед началом балансировки изделия 5 описанное выше устройство для вертикальной балансировки изделий устанавливается и крепится на закладных частях подготовленной площадки 2, например, с помощью анкерных болтов. При этом посредством пригоночных прокладок производят горизонтирование промежуточной платформы 4. С помощью системы измерений измеряют значения реакций опор промежуточной платформы 4 от веса последней. Затем на платформу 4 устанавливают балансируемое изделие в сборе. В варианте осуществления изобретения на платформе 4 посредством быстроразъемных подцапфенников 6 устанавливают основание 14 опорно-поворотного устройства 15 балансируемого изделия, например антенного поста. При этом благодаря особенности конструктивного выполнения посадочных мест балансировочного устройства и особенности выполнения ответных элементов антенного поста последний самоустанавливается в заданном положении, при котором его вертикальная ось вращения геометрически совмещается с осью 12.
В рабочем положении устройства подцапфенники 6, установленные на платформе 4, взаимодействуют с ответными цапфами 13, смонтированными на основании 14 ОПУ 15. Таким образом реализуется трехточечная схема опирания основания 14 ОПУ изделия 5 на промежуточную платформу 4. Аналогичным образом, благодаря особенностям конструктивного выполнения опор 3, реализуется трехточечная схема опирания промежуточной платформы 4 на опорное основание 1.
Благодаря особенности взаимного расположения опор антенного поста 5 и опор промежуточной платформы 4, а именно тому, что они попарно расположены в общих вертикальных плоскостях, проходящих через ось 12, в показаниях силоизмерителей будут отсутствовать составляющие изменений реакции датчиков 7, встроенных в опоры 3 платформы 4, на собственной частоте колебаний оборудования 6 на металлоконструкции промежуточной платформы 4. Таким образом достигается повышение точности балансировки изделия.
После установки изделия 5 в подцапфенниках 6 и фиксации его положения относительно платформы 4 измеряют значения статических реакций опор промежуточной платформы 4 от веса последней в сборе с антенным постом, например, для трех положений балансируемого антенного поста: в исходном положении при 0°, при повороте на 120° и при повороте на 240° (поворот на нужный угол производят по градусной шкале на лимбе ОПУ 15). По измеренным статическим реакциям упомянутых опор известным способом определяют горизонтальные координаты центра масс балансируемого антенного поста. Определяют отклонение измеренных статических реакций от среднеарифметического значения. Если отклонение измеренных статических реакций опор от среднеарифметического значения находится в допустимых пределах, то антенный пост не требует дополнительной статической балансировки. Если это отклонение превышает допустимое значение, то определяется масса и расположение (место установки) балансировочного груза, необходимого для устранения статического дисбаланса. Далее на корпусе антенного поста закрепляют груз для устранения статического дисбаланса.
После устранения статического дисбаланса производят вертикальную динамическую балансировку, при которой измеряют значения реакций опор промежуточной платформы 4 от веса последней в сборе с антенным постом при вращении антенного поста относительно платформы 4 с помощью его собственного (т.е. штатного) привода вращения, при этом датчики 7 и 8 системы измерений неподвижны. Устранение моментной неуравновешенности изделия 5 может производиться традиционными методами, например, добавлением, удалением или перемещением пары балансировочных грузов, устанавливаемых в двух плоскостях коррекции.
Принцип действия системы измерений состоит в преобразовании сигнала с силоизмерителей (сило- и весоизмерительных тензометрических датчиков) 7 и синхронизации этих сигналов с угловым положением антенного поста (изделия) относительно балансировочного устройства. Балансировочное устройство дорезонансного типа, поэтому фаза сигнала датчика 7 совпадает с углом поворота антенного поста (изделия). С помощью программного обеспечения по программному алгоритму с помощью компьютера осуществляется запись деформации силоизмерителей (сило- и весоизмерительных тензометрических датчиков) 7, характеризующей дисбалансы антенного поста (изделия). Динамическая балансировка проводится в двух плоскостях установкой на изделии 5 двух балансировочных грузов (например, сверху и снизу аппаратной кабины).
Перед началом динамической балансировки на платформу 4 устанавливают бесконтактный оптический датчик 8 оборотов. Установка датчика 8 производится с использованием штатива на магнитном основании. При этом антенный пост устанавливают в исходное положение по шкале на лимбе на ОПУ 15 и на днище корпуса аппаратной кабины 16 антенного поста напротив датчика 8 закрепляют ответную датчику 8 светоотражающую метку 9. Включают электропривод вращения ОПУ 15. Далее с помощью силоизмерителей (датчиков) 7 измеряют значения динамических реакций опор промежуточной платформы 4 при частоте вращения антенного поста, например, 10 об/мин. После определяют отклонение измеренных динамических реакций от среднеарифметического значения. Если отклонение измеренных динамических реакций опор от среднеарифметического значения находится в допустимых пределах, то антенный пост (изделие) не требует динамической балансировки. Если отклонение измеренных динамических реакций опор от среднеарифметического значения превышает допустимое значение, то определяется масса и расположение (места установки) верхнего и нижнего балансировочных грузов, необходимых для устранения динамического дисбаланса. Далее на корпусе аппаратной кабины закрепляют балансировочные грузы. После установки балансировочных грузов производят измерение отклонений динамических реакций опор платформы 4 от среднеарифметического значения. В случае если динамические реакции опор превышают допустимое значение, операции динамической балансировки повторяют. Для повышения точности балансировки увеличивают частоту вращения антенного поста. Операции повторяют для частот вращения, например, 20, 30 и 40 об/мин.
Таким образом, благодаря особенностям исполнения, предлагаемый способ вертикальной динамической балансировки изделия обеспечивает возможность производить динамическую балансировку изделия за счет штатного (собственного) привода вращения ОПУ балансируемого изделия, без применения дополнительного привода вращения, причем обеспечивается максимальное приближение схемы, при которой изделие балансируют, к реальной схеме, при которой изделие эксплуатируют. При этом благодаря обеспечению возможности балансировки изделия в сборе достигается повышение точности балансировки. Вместе с этим изобретение обеспечивает возможность осуществления статической балансировки изделия, что повышает точность балансировки в целом. Кроме того, статическая и динамическая балансировка изделия обеспечивается при неподвижной системе измерений, что существенно упрощает передачу измерительных данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2539810C1 |
| СПОСОБ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2013 |
|
RU2530428C1 |
| Стенд для определения массоцентровочных характеристик изделий больших масс | 2016 |
|
RU2655726C2 |
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2011 |
|
RU2460052C1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2007 |
|
RU2339926C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ И КОЛЕБАТЕЛЬНАЯ СИСТЕМА БАЛАНСИРОВОЧНОГО СТАНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2077035C1 |
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2011 |
|
RU2456566C1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| Балансировочный станок | 1983 |
|
SU1144015A1 |
| БАЛАНСИРОВОЧНЫЙ СТЕНД С ВЕРТИКАЛЬНОЙ ОСЬЮ ВРАЩЕНИЯ | 2004 |
|
RU2292533C2 |
Изобретение относится к балансировочной технике и может быть использовано для статической и динамической балансировки изделия, оснащенного собственным приводом вращения относительно вертикальной оси. Способ заключается в том, что изделие посредством его опорно-поворотного устройства с помощью трехточечной схемы опирания устанавливают на неподвижной промежуточной платформе, установленной на неподвижном опорном основании, приводят во вращение с помощью собственного привода вращения опорно-поворотного устройства балансируемого изделия и измеряют динамические реакции между промежуточной платформой и опорным основанием с помощью трех неподвижных опор с силоизмернителями. В варианте выполнения при измерении динамических реакций в качестве силоизмерителей используют сило- и весоизмерительные тензометрические датчики. Технический результат заключается в повышении эффективности процесса балансировки, его точности. 1 з.п. ф-лы, 4 ил.
1. Способ вертикальной динамической балансировки изделия, при котором изделие устанавливают на промежуточной платформе, затем изделие приводят во вращение и измеряют динамические реакции между промежуточной платформой и ее опорным основанием с помощью силоизмерителей, отличающийся тем, что изделие устанавливают посредством его опорно-поворотного устройства в сборе с последним, при этом используют трехточечную схему опирания опорно-поворотного устройства на промежуточную платформу, причем изделие во вращение приводят с помощью собственного привода вращения балансируемого изделия при неподвижной промежуточной платформе, а динамические реакции между промежуточной платформой и опорным основанием измеряют с помощью неподвижных опор с силоизмерителями.
2. Способ по п. 1, отличающийся тем, что при измерении динамических реакций между промежуточной платформой и опорным основанием в качестве силоизмерителей используют сило- и весоизмерительные тензометрические датчики.
| Технология сборки и испытаний космических аппаратов: Учебник для высших технических учебных заведений / И.Т | |||
| Беляков, И.А | |||
| Зернов, Е.Г | |||
| Антонов и др.; Под общ | |||
| ред | |||
| И.Т | |||
| Белякова и И.А | |||
| Зернова | |||
| - М: Машиностроение, 1990 | |||
| Способ добывания бензина и иных продуктов из нефти, нефтяных остатков и пр. | 0 |
|
SU211A1 |
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2539810C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2382999C1 |
| Справочник по балансировке / М.Е | |||
| Левит, Ю.А | |||
| Агафонов, Л.Д | |||
| Вайнгортин и др.; Под общ | |||
| ред | |||
| М.Е | |||
| Левита | |||
| - М: Машиностроение, 1992 | |||
| Стиральная машина для войлоков | 1922 |
|
SU210A1 |

