Настоящее изобретение относится к технике динамической балансировки тел вращения и может быть использовано для определения дисбаланса жестких роторов.
Способ балансировки жестких роторов предусматривает измерение параметров неуравновешенности (величины неуравновешенной массы, радиуса и угла расположения ее центра относительно оси ротора) путем определения в общем случае двух векторов дисбаланса, которые лежат в двух произвольных плоскостях, перпендикулярных оси ротора.
Известны способы балансировки роторов [1], в которых для определения параметров неуравновешенности ротор вращают вокруг оси.
Для определения параметров неуравновешенности в динамическом режиме измеряют колебания оси ротора либо динамические реакции в опорах. Амплитуда этих колебаний либо реакций при определенных условиях пропорциональна величине дисбаланса, а фазовый сдвиг их относительно начала измерений (либо опорного сигнала) указывает на угловую координату его расположения. По полученным данным определяется главный вектор и главный момент дисбаланса, которые по известным соотношениям [1] можно заменить эквивалентной схемой, состоящей из двух дисбалансов, расположенных в двух произвольных плоскостях, перпендикулярных оси ротора и называемых плоскостями приведения дисбаланса.
Способы балансировки при вращении отличаются режимами (дорезонансный, резонансный и зарезонансный) и типами применяемых механических систем балансировочный устройств, которые имеют классификацию по числу степеней свободы и по числу степеней свободы ротора.
Известен способ балансировки ротора, основанный на сообщении ротору, установленному в опорах, вращательного движения. Отличительной особенностью такого способа является то, что для разделения дисбалансов в плоскостях приведения неуравновешенности ротора после проведения измерений параметров колебаний при одном положении ротора его поворачивают на 180° и снова измеряют амплитуду и фазу колебаний ротора, после чего проводят обработку полученных данных, рассчитывая дисбаланс в каждой из плоскостей приведения неуравновешенности [2]. Недостатками этого способа являются высокая трудоемкость и низкая производительность.
Известен способ динамической балансировки ротора с двумя плоскостями приведения при его вращении [3], при котором одну из плоскостей совмещают с осью качания рамы. Вращают ротор, разгоняют его до частоты выше резонансной, отключают привод и на выбеге измеряют дисбаланс в плоскости, которая не совпадает с осью качания. После снижения частоты вращения ниже резонанса повторно измеряют давление в опоре, по которому определяют дисбаланс другой плоскости.
Недостатками такого способа являются трудности с разделением сигналов от различных дисбалансов в различных плоскостях приведения, сравнительно невысокая производительность, связанная с необходимостью разгона и торможения ротора, высокие динамические нагрузки на сам ротор, что исключает применение такого способа при балансировке легкоразрушаемых роторов, высокие энергетические затраты и принципиальная невозможность автоматизации процесса балансировки.
Из известных наиболее близких по технической сущности является способ балансировки роторов [4], согласно которому уравновешиваемому ротору сообщают колебательное движение вокруг его продольной оси. Из-за наличия неуравновешенности с определенной угловой координатой ротор начинает совершать угловые колебания относительно горизонтальной оси, проходящей через точку, расположенную на оси. Амплитуда этих колебаний пропорциональна при определенных условиях величине неуравновешенности, а ориентация горизонтальной оси результирующих угловых колебаний указывает на местом ее расположения.
Недостатком известного способа является невозможность определения динамического дисбаланса.
Техническим результатом предлагаемого способа является расширение области применения за счет появления возможности балансировки роторов с более чем одной плоскостью приведения дисбаланса.
Это достигается тем, что установленному вертикально ротору сообщают колебательные движения относительно его оси, а параметры дисбаланса определяют как функцию колебаний ротора относительно горизонтальной оси. При этом первоначально одну из плоскостей приведения совмещают с горизонтальной осью, относительно которой происходят колебания, возникающие от действия тангенциальных составляющих неуравновешенных сил инерции. Такое расположение ротора исключит влияние неуравновешенности этой плоскости на результат измерения этого этапа. После определения и устранения неуравновешенности в этой плоскости ротор перемещают в осевом направлении на фиксированное расстояние и измерения повторяются.
Кроме того, балансируемому ротору, находящемуся в режиме угловых колебаний, одновременно сообщают равномерный поворот вокруг собственной оси на угол не более φmax=181° до момента появления максимального значения амплитуды колебаний относительно горизонтальной оси, возникающих от неуравновешенных сил инерции.
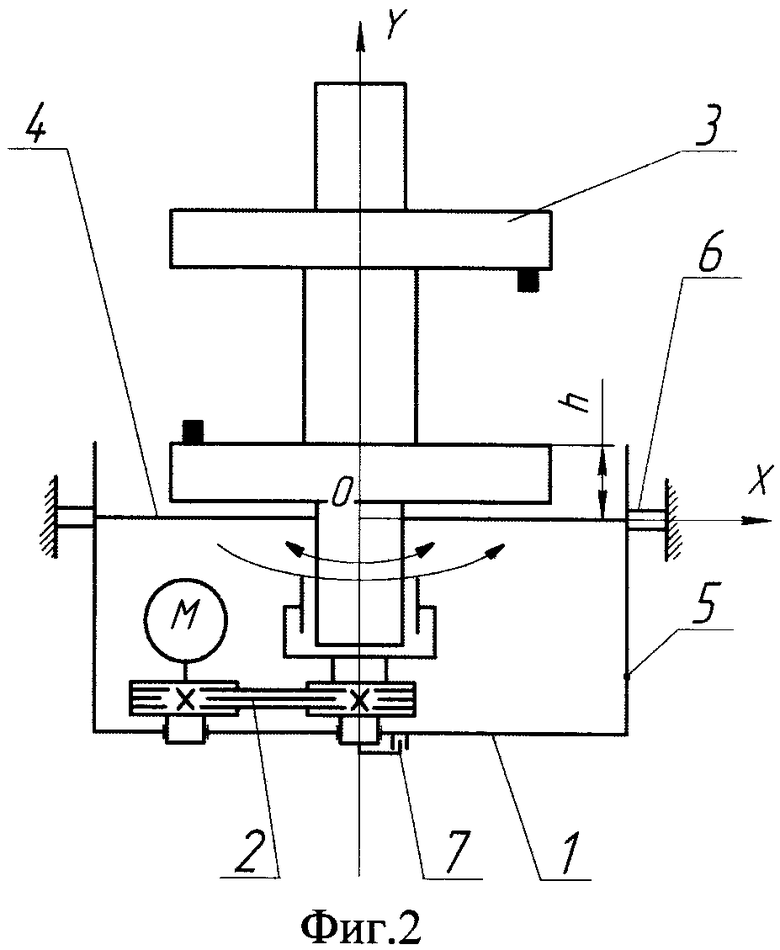
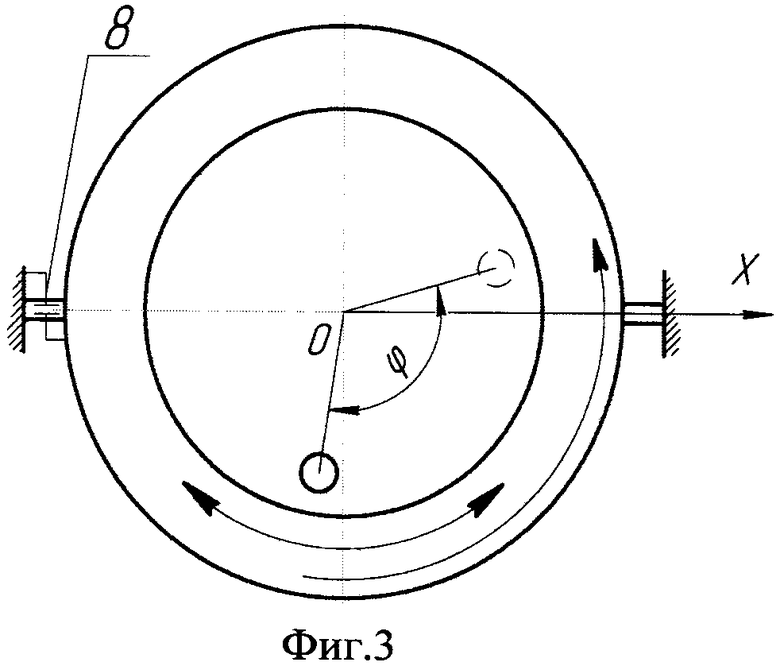
На фиг.1 показано первоначальное положение ротора, а на фиг.2 - положение на втором этапе измерений; на фиг.3 - вид сверху ротора (и дисбаланса) в процессе балансировки.
Способ реализуется следующим образом: на нижнем основании 1 установлен колебательный привод 2 и ротор 3 (см. фиг.1, 2). Нижнее основание 1 соединено с верхним основанием 4 стойками 5, которые позволяют перемещаться нижнему основанию вместе с ротором в осевом направлении. Верхнее основание 4 со станиной соединяется с помощью двух торсионов 6, на которых система совершает вынужденные колебания, вызванные силами инерции от неуравновешенности ротора.
Ротор 3 вместе с основанием 1 и приводом 2 установлен с возможностью перемещения его вдоль оси на величину h и фиксации его в двух положениях, в первом из которых одна из плоскостей приведения, например нижняя, проходит через центр торсионов 6, а во втором смещена (см. фиг.2). Датчики 7 и 8 производят измерения фазы и амплитуды вынужденных колебаний от действия сил инерции от неуравновешенности ротора.
Процесс балансировки ротора с двумя плоскостями приведения начинается с измерения неуравновешенности в верхней плоскости. При этом нижнюю плоскость совмещают с осью торсионов (см. фиг.1). Затем запускают привод и ротор начинает совершать крутильные колебания относительно собственной оси, при этом постепенно поворачиваясь. При наличии неуравновешенности в верхней плоскости приведения на ротор действует динамический момент, вызывающий поворот всей системы относительно оси ОХ. Причем момент, а соответственно и колебания будут максимальными в том случае, когда угол φ=0 (см. фиг.3). Измерение величины неуравновешенности производят датчиком 8, установленным на верхнем основании относительно неподвижной системы отсчета. Датчик опорного сигнала 7, установленный на роторе, предназначен для получения сигнала о положении ротора в каждый момент времени с целью определения местоположения неуравновешенности (квадранта).
После определения неуравновешенности в верхней плоскости приведения необходимо устранить ее с целью исключения влияния этого дисбаланса на последующее измерения. В противном случае его нужно учитывать при дальнейших измерениях.
После устранения (или измерения) неуравновешенности в верхней плоскости приведения ротор вместе с нижним основанием и приводом перемещают вверх на величину h (величину h выбирают, учитывая конструктивные параметры балансируемого ротора, к примеру, величину h можно принять равной 1/2…1/4 расстояния между плоскостями приведения) и производят повторные измерения (см. фиг.2).
Таким образом, использование заявляемого способа позволяет измерить параметры неуравновешенности ротора с высокой точностью в двух плоскостях приведения неуравновешенности. Способ удобен в эксплуатации и не требует больших материальных затрат на его реализацию.
Источники информации
1. М.Е.Левит, В.М.Рыженков, Балансировка деталей и узлов. - М., Машиностроение, 1986 г.
2. Патент США №5359885, кл.73/146, 1994 г.
3. Авторское свидетельство СССР №1497496, кл. G01M 1/16, 1989 г.
4. Авторское свидетельство СССР №712708, кл. G01M 1/16, 1980 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2270985C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| Устройство для балансировки ротора | 2022 |
|
RU2795641C1 |
| СПОСОБ ВИБРАЦИОННОЙ БАЛАНСИРОВКИ РОТОРОВ И КОЛЕБАТЕЛЬНАЯ СИСТЕМА БАЛАНСИРОВОЧНОГО СТАНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2101689C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2005 |
|
RU2319127C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| Способ обеспечения автоматической балансировки статически неуравновешенного ротора | 2021 |
|
RU2766945C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2002 |
|
RU2225603C2 |
| СПОСОБ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2003 |
|
RU2245529C1 |
Изобретение относится к балансировочной технике и может быть использовано для определения и коррекции дисбаланса жестких роторов. Способ заключается в том, что установленный вертикально неуравновешенный ротор, находящийся в режиме угловых колебаний, одновременно совершает равномерный поворот вокруг собственной оси на угол не более φmax=181° до момента появления максимального значения амплитуды колебаний относительно горизонтальной оси, возникающих от неуравновешенных сил инерции. При этом первоначально одна из плоскостей приведения совмещена с горизонтальной осью, относительно которой происходят колебания, возникающие от действия тангенциальных составляющих неуравновешенных сил инерции. Такое расположение ротора исключит влияние неуравновешенности этой плоскости на результат измерения этого этапа. После определения и устранения неуравновешенности в этой плоскости ротор перемещается в осевом направлении на фиксированное расстояние и измерения повторяются. Технический результат заключается в повышении точности измерения параметров неуравновешенности ротора, расширении области применения способа. 1 з.п. ф-лы, 3 ил.
1. Способ динамической балансировки роторов, заключающийся в том, что установленному вертикально ротору сообщают колебательные движения относительно его оси, а параметры дисбаланса определяют как функцию колебаний ротора относительно горизонтальной оси, отличающийся тем, что осуществляют балансировку ротора в следующей последовательности: первоначально одну из плоскостей приведения совмещают с горизонтальной осью, относительно которой происходят колебания, возникающие от действия тангенциальных составляющих неуравновешенных сил инерции, и производят измерения этих колебаний; после определения и устранения неуравновешенности в первой плоскости ротор перемещают в осевом направлении на фиксированное расстояние и измерения колебаний повторяют.
2. Способ по п.1, отличающийся тем, что установленному вертикально неуравновешенному ротору, находящемуся в режиме угловых колебаний, одновременно сообщают равномерный поворот вокруг собственной оси на угол не более φmax=181° до момента появления максимального значения амплитуды колебаний относительно горизонтальной оси, возникающих от неуравновешенных сил инерции.
| Способ определения дисбаланса ротора | 1959 |
|
SU712708A1 |
| Устройство для балансированияРОТОРА HACOCA B пРОцЕССЕ РАбОТы | 1979 |
|
SU808890A1 |
| Устройство для балансировки роторов | 1979 |
|
SU896434A1 |
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ОСЕВОГО ДИСБАЛАНСА ДИНАМИЧЕСКИ НАСТРАИВАЕМЫХ ГИРОСКОПОВ | 1989 |
|
RU2039959C1 |
| US 5359885 A, 01.11.1994. | |||

