Область техники
Настоящее изобретение относится к управляемому гусеничному ходовому механизму в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
Сельскохозяйственные рабочие транспортные средства, в частности, тракторы или самоходные уборочные машины, такие как зерноуборочные комбайны или полевые измельчители, все чаще оснащаются гусеничными ходовыми механизмами. Благодаря этому опорные силы транспортного средства распределяются на более обширную опорную поверхность, что приводит к меньшей нагрузке на почву поля, по которому движется транспортное средство.
Вследствие большой опорной поверхности гусеничного ходового механизма и связанной с этим хорошей характеристикой сцепления напрашивается решение передавать на гусеничный ходовой механизм также приводные усилия. Поэтому в большинстве случае в известных из уровня техники сельскохозяйственных рабочих транспортных средствах гусеничные ходовые механизмы выполнены приводными. Приводная трансмиссия такого гусеничного ходового механизма может содержать дифференциальные передаточные механизмы, вход которых приводится двигателем, а два выхода приводят левую и правую гусеничные тележки.
Кроме того, известный из впоследствии опубликованной немецкой патентной заявки 102014104549.1 гусеничный ходовой механизм выполнен управляемым. Для осуществления функции управления поворотом выходы дифференциального передаточного механизма, которые приводят гусеничные тележки, связаны друг с другом посредством воздействующего на них гидростатического передаточного механизма. За счет изменения передаточного отношения гидростатического передаточного механизма путем изменения объемного расхода или объемной подачи одного или обоих гидростатических блоков можно оказывать влияние на отношение чисел оборотов выходов передаточного механизма, а следовательно и на отношение скоростей гусеничных тележек, что при сравнительно низких затратах обеспечивает дифференциальное управление поворотом гусеничного ходового механизма.
По сравнению с гусеничными ходовыми механизмами, в которых функция управления поворотом обеспечивается простым индивидуальным торможением внутренней относительно поворота гусеничной тележки, описанное в немецкой патентной заявке 102014104549.1 налагаемое гидравлическое управление поворотом имеет то преимущество, что не вызывает износа при торможении и связанных с ним потерь мощности. Кроме того, благодаря гидравлическому управлению достигается особенно тонкая управляемость.
Однако практика показала, что для тяжелых сельскохозяйственных рабочих транспортных средств с таким управляемым гусеничным ходовым механизмом гидростатические блоки гидравлического передаточного механизма должны быть относительно крупными, чтобы даже при низких числах оборотов создавать достаточный крутящий момент. С другой стороны, для того, чтобы транспортные средства могли двигаться по дороге с большей скоростью, гидростатические блоки должны вращаться относительно быстро. При этом два требования, - высокий крутящий момент и высокое число оборотов, - взаимно исключают друг друга. Во всяком случае, гидростатический блок, который на практике удовлетворял бы обоим требованиям, имел бы конструктивно неприемлемые размеры.
Раскрытие изобретения
Соответственно задачей настоящего изобретения является создание компактного управляемого гусеничного ходового механизма указанного типа, который может работать как на относительно низких скоростях, - в частности, при движении на поле, - так и на относительно высоких скоростях, в частности, при дорожном движении.
Решение поставленной задачи обеспечивается в управляемом гусеничном ходовом механизме, обладающем признаками по пункту 1 формулы изобретения. Он отличается тем, что содержит средства для отсоединения выходов передаточного механизма от гидравлического передаточного механизма. В соответствии с изобретением было прежде всего установлено, что вследствие дифференциального управления поворотом, которое обеспечивается наложением действия гидравлического передаточного механизма, уже достигаются упомянутые выше преимущества, такие как низкий износ, сниженные потери мощности и высокая чувствительность управления. Для сохранения этих преимуществ и в то же время использования компактного гусеничного ходового механизма также для более высоких скоростей в соответствии с изобретением было сочтено необходимым создать возможность отсоединения приводных выходов дифференциального передаточного механизма от гидравлического передаточного механизма. За счет средств для отсоединения выходов передаточного механизма от гидравлического передаточного механизма стало возможным при необходимости снимать влияние гидравлического передаточного механизма на приводы гусеничных тележек. Так например, если это осуществляется при превышении определенной скорости движения и/или определенного числа оборотов, предотвращается работа гидравлического передаточного механизма с излишне высокой скоростью (числом оборотов). В результате гидравлический передаточный механизм может быть рассчитан на более низкие числа оборотов.
Предусмотренные изобретением средства для отсоединения выходов передаточного механизма от гидравлического передаточного механизма могут быть выполнены различным образом. В предпочтительном решении по развитию изобретения предусмотрено, что между первым выходом передаточного механизма и первым звеном гидравлического передаточного механизма расположена первая соединительная муфта, а между вторым выходом передаточного механизма и вторым звеном гидравлического передаточного механизма расположена вторая соединительная муфта. Таким образом, отсоединение производится механически путем размыкания соответствующей муфты.
При этом соединительные муфты выполнены в виде фрикционных муфт, чтобы обеспечивать возможность выравнивания различных чисел оборотов.
Гидравлический передаточный механизм может быть механизмом различных видов. Предпочтительно он содержит, по меньшей мере, первый гидростатический блок, который может быть приведен в соединение с первым выходом передаточного механизма, и второй гидростатический блок, который может быть приведен в соединение со вторым выходом передаточного механизма, причем гидростатические блоки соединены друг с другом в один гидравлический контур. Таким образом, с помощью гидравлического передаточного механизма может быть задано отношение чисел оборотов между первым и вторым приводными выходами передаточного механизма.
Благодаря тому, что, по меньшей мере, один, предпочтительно оба гидростатических блока имеют изменяемый объемный расход или объемную подачу, может изменяться это отношение чисел оборотов.
Для получения относительно высоких приводных моментов на гусеничных тележках предпочтительно каждый гидростатический блок выполнен с возможностью приведения в приводное соединение с относящимся к нему выходом передаточного механизма посредством цилиндрической зубчатой передачи. В этом случае гидростатические блоки могут быть выполнены относительно малыми.
При этом в простом конструктивном исполнении предусмотрено, что цилиндрическая зубчатая передача содержит относящуюся к гидростатическому блоку цилиндрическую шестерню и зацепляющуюся с ней относящуюся к выходу передаточного механизма цилиндрическую шестерню.
Предпочтительно для цилиндрической шестерни, которая относится к выходу передаточного механизма, предназначена соответствующая соединительная муфта, с помощью которой может быть разъединено или установлено приводное соединение между соответствующей цилиндрической шестерней и выходом передаточного механизма.
Для надежного предотвращения работы гидростатических блоков со слишком высоким числом оборотов в дальнейшем предпочтительном решении по развитию изобретения предусмотрено устройство управления, выполненное с возможностью отсоединять выходы передаточного механизма от гидравлического передаточного механизма в зависимости от эксплуатационных параметров, в частности, от скорости движения гусеничного ходового механизма, числа оборотов входа передаточного механизма, чисел оборотов выходов передаточного механизма, числа оборотов гидростатического блока и/или других подобных параметров.
При этом предпочтительно может быть предусмотрено, что устройство управления выполнено с возможностью приводить в действие соединительные муфты совместно посредством соответствующего управления.
В предпочтительном решении по развитию гусеничного ходового механизма предусмотрено, что он выполнен с возможностью эксплуатации в двух рабочих режимах, причем в рабочем режиме соединения выходы дифференциального передаточного механизма связаны друг с другом гидравлическим передаточным механизмом, так что может осуществляться управление поворотом гусеничного ходового механизма путем изменения передаточного отношения гидравлического передаточного механизма и сопутствующего изменения отношения чисел оборотов привода гусеничных тележек, и при этом в рабочем режиме отсоединения выходы дифференциального передаточного механизма отсоединены от гидравлического передаточного механизма, так что в принудительном состоянии движения гусеничного ходового механизма, в частности, при вынужденном криволинейном движении отношение чисел оборотов выходов передаточного механизма может приспосабливаться к этому принудительному состоянию движения.
Предпочтительно устройство управления выполнено с возможностью выбирать рабочий режим гусеничного ходового механизма в зависимости от одного или нескольких эксплуатационных параметров, в частности, в зависимости от скорости движения гусеничного ходового механизма, числа оборотов входа передаточного механизма, чисел оборотов выходов передаточного механизма, числа оборотов гидростатического блока и/или других параметров.
При этом предпочтительно для лежащих ниже задаваемых величин скоростей движения и/или чисел оборотов выбирается рабочий режим соединения, а для лежащих выше задаваемых величин скоростей движения и/или чисел оборотов выбирается рабочий режим отсоединения.
В особенно предпочтительном примере осуществления изобретения гидравлический контур выполнен с возможностью соединения с гидронасосом, в частности, приводимым приводным двигателем. С помощью приводимого приводным двигателем гидронасоса, который может подсоединяться к гидравлическому контуру только в случае потребности, гидравлический контур может снабжаться дополнительной мощностью. Путем поворота гидростатических блоков на одинаковую величину в противоположных направлениях обеспечивается возможность поворота на месте вокруг вертикальной оси гусеничного ходового механизма. При этом гидростатические блоки могут поворачиваться на одинаковую величину в противоположных направлениях, поскольку при стоячем положении транспортного средства движение коробки дифференциала невозможно. Соединение гидравлического контура с гидронасосом дает то преимущество, что даже в неподвижном положении транспортного средства может осуществляться управление поворотом, так как подача энергии для налагаемого управления поворотом производится в зависимости не только от числа оборотов дифференциала, но также от гидравлического потока гидронасоса. При медленном движении можно подавать в налагаемое управление поворотом дополнительный объемный поток, а следовательно и дополнительную энергию. Кроме того, при медленном движении гидростатические блоки могут быть повернуты более круто с созданием большего момента. Достаточные числа оборотов могут создаваться посредством дополнительного масляного потока от гидронасоса. В результате гидростатические блоки могут иметь, например, меньшие размеры.
Далее, изобретение относится к сельскохозяйственному рабочему транспортному средству, в частности, трактору или самоходной уборочной машине на полугусеничном ходу, содержащему конструкцию транспортного средства, которая с помощью гусеничного ходового механизма в соответствии с любым из пунктов формулы изобретения, и с помощью дополнительной ходовой оси опирается на землю, причем дополнительная ходовая ось выполнена управляемой, так что управление поворотом рабочего транспортного средства по меньшей мере, в рабочем режиме отсоединения гусеничного ходового механизма может осуществляться посредством дополнительной ходовой оси.
Краткий перечень чертежей
Далее изобретение будет подробно пояснено со ссылками на прилагаемые чертежи. На чертежах:
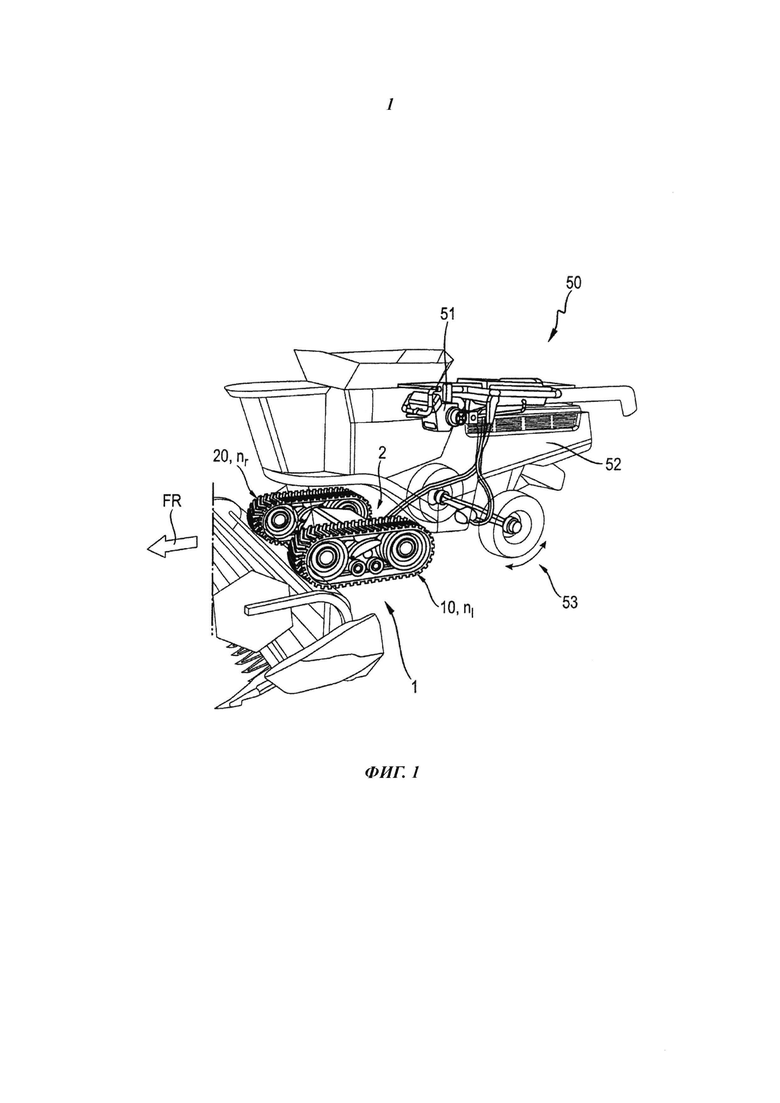
фиг. 1 изображает в перспективе сельскохозяйственное рабочее транспортное средство в виде зерноуборочного комбайна;
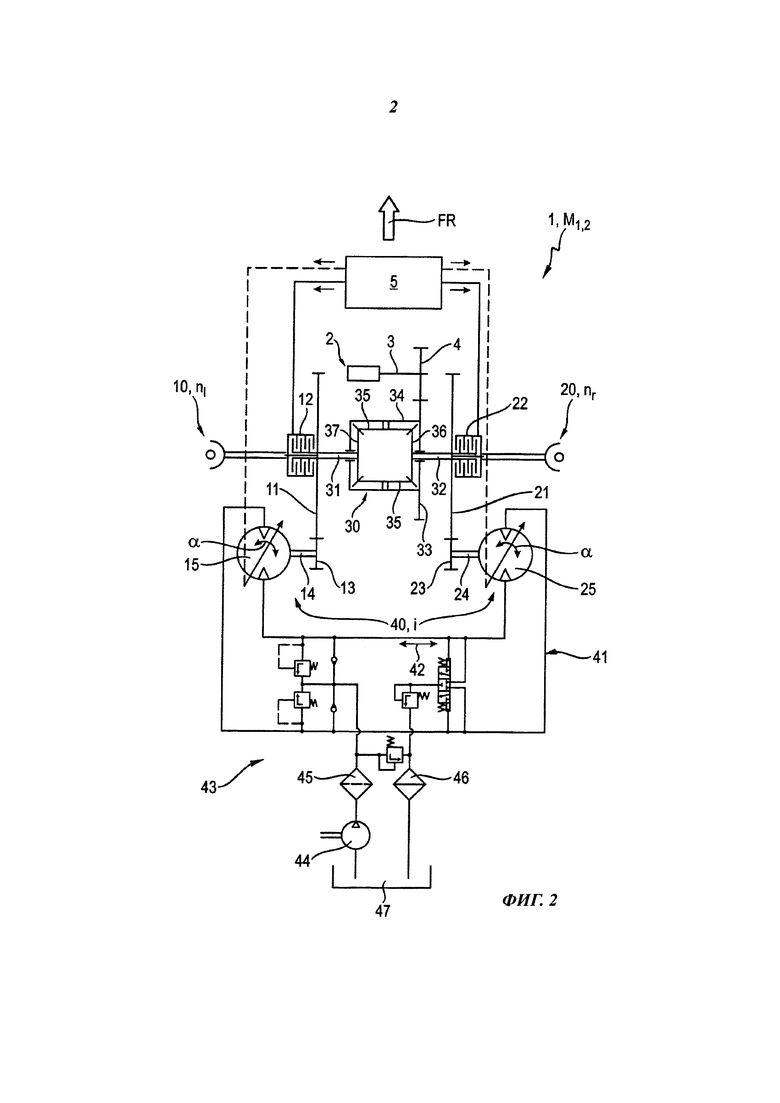
фиг. 2 изображает принципиальную схему управляемого гусеничного ходового механизма; и
фиг. 3 изображает принципиальную схему управляемого гусеничного ходового механизма, гидравлический контур которого может соединяться и гидронасосом.
Осуществление изобретения
На фиг. 2 показана принципиальная схема управляемого гусеничного ходового механизма 1 в соответствии с изобретением. Этот гусеничный ходовой механизм 1 может эффективно использоваться для привода сельскохозяйственного рабочего транспортного средства, например, для показанного на фиг. 1 зерноуборочного комбайна 50. Согласно схеме по фиг. 2 гусеничный ходовой механизм 1 содержит в качестве основных элементов левую гусеничную тележку 10, правую гусеничную тележку 20, дифференциальный передаточный механизм 30 и гидравлический передаточный механизм 40, который может быть подсоединен к нему или отсоединен от него. Предпочтительное направление FR движения гусеничного ходового механизма 1 обозначено стрелкой FR.
Дифференциальный передаточный механизм 30 сам по себе известен и приводится приводным двигателем 2. Приводимый от приводного двигателя 2 приводной вал 3 находится в кинематической связи с коробкой 34 дифференциального передаточного механизма 30 с помощью цилиндрической зубчатой передачи, содержащей цилиндрическую шестерню 4 и зацепляющуюся с ней цилиндрическую шестерню 33. В коробке 34 дифференциала заключены несколько конических приводных шестерен 35. Каждая коническая шестерня 35 зацепляется с двумя противолежащими коническими шестернями 36, 37. При этом коническая шестерня 37 относится к первому выходу 31 передаточного механизма для привода левой гусеничной тележки 10, а коническая шестерня 36 относится ко второму выходу 32 передаточного механизма для привода правой гусеничной тележки 20. Известным образом дифференциальный передаточный механизм 30 разделяет вводимую от приводного вала 3 приводную мощность между выходами 31, 32 передаточного механизма.
Для первого выхода 31 предназначена цилиндрическая шестерня 11, которая зацепляется со следующей цилиндрической шестерней 13, чтобы через вал 14 устанавливать приводное соединение с гидростатическим блоком 15. Гидростатический блок 15 имеет изменяемый объемный расход или объемную подачу (угол α поворота).
Для второго выхода 32 предназначена цилиндрическая шестерня 21, которая зацепляется со следующей цилиндрической шестерней 23, чтобы через вал 24 устанавливать приводное соединение с гидростатическим блоком 25. Гидростатический блок 25 также имеет изменяемый объемный расход или объемную подачу (угол α поворота). При этом угол α поворота гидростатических блоков 15, 25 регулируется раздельно.
Два гидростатических блока 15, 25 соединены друг с другом в замкнутый гидравлический контур 41 (с гидравлической средой 42) для образования гидравлического передаточного механизма 40. При этом выходы 31, 32 дифференциального передаточного механизма 30 известным образом связаны друг с другом гидравлическим передаточным механизмом 40. В зависимости от выбранного угла α поворота гидростатических блоков 15, 25 между выходами 31, 32 передаточного механизма устанавливается изменяемое передаточное отношение i.
Замкнутый гидравлический контур 41 известным образом снабжается гидравлической средой 42 от контура 43 питания. Контур питания содержит гидронасос 44, служащий внешним источником давления, бак 47, масляный охладитель 46 и масляный фильтр 45.
В соответствии с изобретением показанный гусеничный ходовой механизм 1 снабжен средствами, например, в виде соединительных муфт, с помощью которых выходы 31, 32 передаточного механизма могут быть отсоединены от гидравлического передаточного механизма 40.
Для этого между первым выходом 31 передаточного механизма и гидростатическим блоком 15 расположена первая соединительная муфта 12, а между вторым выходом 32 передаточного механизма и гидростатическим блоком 25 расположена вторая соединительная муфта 22. Соединительные муфты 12, 22 выполнены в виде фрикционных муфт, посредством которых соответствующая цилиндрическая шестерня 11, 21 может избирательно жестко соединяться с соответствующим выходом 31, 32 передаточного механизма или отсоединяться от него.
Центральное устройство 5 управления находится в сигнальной связи с двумя соединительными муфтами 11, 21 и выполнено с возможностью отсоединять выходы 31, 32 передаточного механизма от гидравлического передаточного механизма 40 в зависимости от эксплуатационных параметров, в частности, скорости движения гусеничного ходового механизма 1, числа оборотов входа 34 передаточного механизма, чисел nl, nr оборотов выходов 31, 32 передаточного механизма, числа оборотов гидростатического блока 15, 25 и/или других параметров. Предпочтительно отсоединение осуществляется совместно путем соответствующего управления.
С помощью устройства 5 управления гусеничный ходовой механизм может работать в двух рабочих режимах М1, М2. При этом в рабочем режиме M1 соединения выходы 31, 32 дифференциального передаточного механизма 30 связаны друг с другом гидравлическим передаточным механизмом 40, так что может осуществляться управление поворотом гусеничного ходового механизма 1 путем изменения передаточного отношения i гидравлического передаточного механизма 40 и сопутствующего изменения отношения чисел nl, nr оборотов привода гусеничных тележек 10, 20. В рабочем режиме М2 отсоединения выходы 31, 32 дифференциального передаточного механизма 30 отсоединены от гидравлического передаточного механизма 40, так что в принудительном состоянии движения гусеничного ходового механизма, в частности, при вынужденном криволинейном движении отношение чисел nl, nr оборотов выходов 31, 32 передаточного механизма может приспосабливаться к этому принудительному состоянию движения.
При этом устройство 5 управления выполнено с возможностью выбирать рабочий режим M1, М2 гусеничного ходового механизма 1 в зависимости от одного или нескольких эксплуатационных параметров, в частности, в зависимости от скорости движения гусеничного ходового механизма 1, числа оборотов входа 34 передаточного механизма, числа nl, nr оборотов выходов 31, 32 передаточного механизма, числа оборотов гидростатического блока 15, 25 и/или других параметров. Для лежащих ниже задаваемых величин скоростей движения и/или чисел nl, nr оборотов устройство 5 управления выбирает рабочий режим M1 соединения. Для лежащих выше задаваемых величин скоростей движения и/или чисел nl, nr оборотов устройство 5 управления выбирает рабочий режим М2 отсоединения.
На фиг. 1 в качестве примера показано сельскохозяйственное рабочее транспортное средство в виде зерноуборочного комбайна 50 с полугусеничной ходовой частью. Комбайн 50 оснащен главным приводным двигателем 51, предназначенным, кроме прочего, для привода приводного двигателя 2, и имеет конструкцию 52 транспортного средства, которая опирается на землю с помощью описанного со ссылкой на фиг. 2 гусеничного ходового механизма 1 и дополнительной ходовой оси 53. Дополнительная ходовая ось 53 выполнена управляемой, так что управление поворотом комбайна, по крайней мере в рабочем режиме М2 отсоединения может осуществляться через дополнительную ходовую ось 53.
Зерноуборочный комбайн 50 с гусеничным ходовым механизмом 1, выполненным в соответствии с изобретением, создает то преимущество, что на относительно низких скоростях движения может осуществляться управление поворотом гусеничного ходового механизма 1 с помощью гидравлического наложения управления поворотом посредством гидравлического передаточного механизма 40. При поворотах отсутствует износ от торможения и связанные с ним потери мощности. Кроме того, достигается особенно тонкая управляемость.
При более высоких скоростях имеющийся на комбайне 50 гусеничный ходовой механизм 1 создает преимущество в том, что выходы 31, 32 передаточного механизма отсоединены от гидравлического передаточного механизма, так что гидростатические блоки 15, 25 не должны работать со слишком высокими числами оборотов. Соответственно возможна их компактная конструктивная форма. Для обеспечения управляемости поворотом комбайна 50 при отсоединенном гидравлическом передаточном механизме 40 в данном случае служит исключительно управляемая ходовая ось 53.
На фиг. 3 показана принципиальная схема управляемого гусеничного ходового механизма 1, гидравлический контур 41 которого с помощью управляющего клапана 54 может соединяться с гидронасосом 55. При этом гидронасос 55 приводится двигателем 56, например, приводным двигателем сельскохозяйственного рабочего транспортного средства. При соединении гидравлического контура 41 с гидронасосом 55 последний обеспечивает мощность, что позволяет управлять поворотом при неподвижном транспортном средстве или при его движении с низкой скоростью.
Перечень позиций
1 Гусеничный ходовой механизм
2 Приводной двигатель
3 Приводной вал
4 Цилиндрическая шестерня
5 Устройство управления
10 Левая гусеничная тележка
11 Цилиндрическая шестерня
12 Фрикционная муфта
13 Цилиндрическая шестерня
14 Вал
15 Гидростатический блок
20 Правая гусеничная тележка
21 Цилиндрическая шестерня
22 Фрикционная муфта
23 Цилиндрическая шестерня
24 Вал
25 Гидростатический блок
30 Дифференциальный передаточный механизм
31 Выход передаточного механизма (левый)
32 Выхода передаточного механизма (правый)
33 Цилиндрическая шестерня
34 Коробка дифференциала
35 Коническая шестерня
36 Коническая шестерня
37 Коническая шестерня
40 Гидравлический передаточный механизм
41 Замкнутый гидравлический контур
42 Гидравлическая среда
43 Контур питания
44 Гидронасос
45 Масляный фильтр
46 Масляный охладитель
47 Бак
50 Зерноуборочный комбайн
51 Главный приводной двигатель
52 Конструкция транспортного средства
53 Задняя ходовая ось
54 Управляющий клапан
55 Гидронасос
56 Двигатель
FR Направление движения
М1 Рабочий режим соединения
М2 Рабочий режим отсоединения
nl Число оборотов (левый привод)
nr Число оборотов (правый привод)
α Угол поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2015 |
|
RU2674597C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2687400C2 |
| УПРАВЛЯЕМЫЙ ГУСЕНИЧНЫЙ ХОДОВОЙ МЕХАНИЗМ | 2015 |
|
RU2679792C2 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2469878C2 |
| КОРОБКА ПЕРЕДАЧ | 2015 |
|
RU2682992C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА И СПОСОБ СОДЕЙСТВИЯ РУЛЕВОМУ УПРАВЛЕНИЮ | 2016 |
|
RU2701289C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРИВОДОМ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ И СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2015 |
|
RU2692522C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2008 |
|
RU2457657C2 |
| СТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ И СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ТАКОЙ КОРОБКОЙ ПЕРЕДАЧ | 2014 |
|
RU2653410C2 |
| Приводное устройство для транспортного средства | 1989 |
|
SU1836238A3 |

Изобретение относится к управляемому гусеничному ходовому механизму, такому как трактор или самоходная уборочная машина. Управляемый гусеничный ходовой механизм содержит левостороннюю гусеничную тележку, правостороннюю гусеничную тележку, дифференциальный передаточный механизм, первый выход и второй выход, гидравлический передаточный механизм с изменяемым передаточным отношением. Выходы дифференциального передаточного механизма соединены друг с другом гидравлическим передаточным механизмом. Управляемый гусеничный ходовой механизм также содержит средства для отсоединения выходов передаточного механизма от гидравлического передаточного механизма. Достигается повышение компактности устройства. 2 н. и 13 з.п. ф-лы, 3 ил.
1. Управляемый гусеничный ходовой механизм (1) для сельскохозяйственного рабочего транспортного средства, в частности такого как трактор или самоходная уборочная машина, содержащий
левостороннюю гусеничную тележку (10), правостороннюю гусеничную тележку (20),
дифференциальный передаточный механизм (30), содержащий
приводимый двигателем вход (34) передаточного механизма,
первый выход (31) передаточного механизма для привода левой гусеничной тележки (10) и
второй выход (32) передаточного механизма для привода правой гусеничной тележки (20), а также
гидравлический передаточный механизм (40) с изменяемым передаточным отношением (i),
причем выходы (31, 32) дифференциального передаточного механизма (30) соединены друг с другом гидравлическим передаточным механизмом (40), так что посредством изменения передаточного отношения (i) гидравлического передаточного механизма (40) можно оказывать влияние на отношение чисел (nl, nr) оборотов выходов (31, 32) передаточного механизма,
отличающийся тем, что содержит средства для отсоединения выходов (31, 32) передаточного механизма от гидравлического передаточного механизма (40).
2. Гусеничный ходовой механизм по п. 1, отличающийся тем, что между первым выходом (31) передаточного механизма и первым звеном (15) гидравлического передаточного механизма (40) расположена первая соединительная муфта (12), а между вторым выходом (32) передаточного механизма и вторым звеном (25) гидравлического передаточного механизма (40) расположена вторая соединительная муфта (22).
3. Гусеничный ходовой механизм по п. 2, отличающийся тем, что соединительные муфты (12, 22) выполнены в виде фрикционных муфт.
4. Гусеничный ходовой механизм по любому из предыдущих пунктов, отличающийся тем, что гидравлический передаточный механизм (40) содержит первый гидростатический блок (15), который выполнен с возможностью приведения в соединение с первым выходом (31) передаточного механизма, и второй гидростатический блок (25), который выполнен с возможностью приведения в соединение со вторым выходом (32) передаточного механизма, причем гидростатические блоки (15, 25) соединены друг с другом в один гидравлический контур (41).
5. Гусеничный ходовой механизм по п. 4, отличающийся тем, что, по меньшей мере, один, предпочтительно оба гидростатических блока (15, 25) имеют изменяемый объемный расход или объемную подачу.
6. Гусеничный ходовой механизм по п. 5, отличающийся тем, что каждый гидростатический блок (15, 16) выполнен с возможностью приведения в приводное соединение с относящимся к нему выходом (31, 32) передаточного механизма посредством цилиндрической зубчатой передачи (11, 13; 21, 23).
7. Гусеничный ходовой механизм по п. 6, отличающийся тем, что цилиндрическая зубчатая передача (11, 13; 21, 23) содержит относящуюся к гидростатическому блоку (15, 25) цилиндрическую шестерню (13; 23) и зацепляющуюся с ней относящуюся к выходу (31; 32) передаточного механизма цилиндрическую шестерню (11; 21).
8. Гусеничный ходовой механизм по п. 7, отличающийся тем, что для цилиндрической шестерни (11; 21), которая относится к выходу (31; 32) передаточного механизма, предназначена соответствующая соединительная муфта (12; 22), посредством которой может быть разъединено или установлено приводное соединение между соответствующей цилиндрической шестерней (11; 21) и выходом (31; 32) передаточного механизма.
9. Гусеничный ходовой механизм по любому из пп. 1-3, 5-8, отличающийся тем, что предусмотрено устройство (5) управления, выполненное с возможностью отсоединять выходы (31, 32) передаточного механизма от гидравлического передаточного механизма (40) в зависимости от эксплуатационных параметров, в частности от скорости движения гусеничного ходового механизма (1), числа оборотов входа (34) передаточного механизма, чисел (nl, nr) оборотов выходов (31, 32) передаточного механизма, числа оборотов гидростатического блока (15, 25) и/или других подобных параметров.
10. Гусеничный ходовой механизм по п. 9, отличающийся тем, что устройство (5) управления выполнено с возможностью приводить в действие соединительные муфты (12, 22) совместно посредством соответствующего управления.
11. Гусеничный ходовой механизм по любому из пп. 1-3, 5-8, 10, отличающийся тем, что он выполнен с возможностью эксплуатации в двух рабочих режимах (M1, М2), причем
в рабочем режиме (М1) соединения выходы (31, 32) дифференциального передаточного механизма (30) связаны друг с другом гидравлическим передаточным механизмом (40) с обеспечением возможности осуществления управления поворотом гусеничного ходового механизма (1) путем изменения передаточного отношения (i) гидравлического передаточного механизма (40) и сопутствующего изменения отношения чисел (nl, nr) оборотов привода гусеничных тележек (10, 20), при этом
в рабочем режиме (М2) отсоединения выходы (31, 32) дифференциального передаточного механизма (30) отсоединены от гидравлического передаточного механизма (40), так что в принудительном состоянии движения гусеничного ходового механизма, в частности при вынужденном криволинейном движении, отношение чисел (nl, nr) оборотов выходов (31, 32) передаточного механизма может приспосабливаться к этому принудительному состоянию движения.
12. Гусеничный ходовой механизм по п. 11, отличающийся тем, что устройство (5) управления выполнено с возможностью выбирать рабочий режим (M1, М2) гусеничного ходового механизма (1) в зависимости от одного или нескольких эксплуатационных параметров, в частности в зависимости от скорости движения гусеничного ходового механизма (1), числа оборотов входа (34) передаточного механизма, чисел (nl, nr) оборотов выходов (31, 32) передаточного механизма, числа оборотов гидростатического блока (15, 25) и/или других подобных параметров.
13. Гусеничный ходовой механизм по п. 12, отличающийся тем, что для лежащих ниже задаваемых величин скоростей движения и/или чисел (nl, nr) оборотов предусмотрен выбор рабочего режима (М1) соединения, а для лежащих выше задаваемых величин скоростей движения и/или чисел (nl, nr) оборотов предусмотрен выбор рабочего режима (М2) отсоединения.
14. Гусеничный ходовой механизм по любому из пп. 1-3, 5-8, 10, 12, 13, отличающийся тем, что гидравлический контур (41) выполнен с возможностью соединения с гидронасосом (55), в частности, приводимым приводным двигателем.
15. Сельскохозяйственное рабочее транспортное средство (50), в частности трактор или самоходная уборочная машина на полугусеничном ходу, содержащее конструкцию (52) транспортного средства, которая с помощью гусеничного ходового механизма (1) по любому из предыдущих пунктов и с помощью дополнительной ходовой оси (53) опирается на землю, причем дополнительная ходовая ось (53) выполнена управляемой таким образом, что обеспечена возможность управления поворотом рабочего транспортного средства (50), по меньшей мере, в рабочем режиме (М2) отсоединения гусеничного ходового механизма (1) посредством дополнительной ходовой оси (53).
| ПОЛИОЛЕФИНОВАЯ КОМПОЗИЦИЯ | 1992 |
|
RU2113446C1 |
| US 20130154345 A1, 20.06.2013 | |||
| Механизм поворота | 1989 |
|
SU1803341A1 |
| Бесступенчатый механизм поворота В.С.Козлова для транспортного средства | 1990 |
|
SU1740228A1 |
| Трансмиссия гусеничной машины | 1984 |
|
SU1162628A1 |

