Изобретение относится к устройствам захвата и манипуляторам и предназначено для подъема и транспортировки объектов произвольной формы в автоматизированном режиме.
Известно устройство по патенту №2624278 «Адаптивный захват», от 12.07.2016 г., опубл. БИ №19, 03.07.2017, который состоит из системы управления приводами и электро-механической системы, включающей корпус (ладонь) с установленными на нем пальцами, каждый из которых состоит из фаланг с тактильными датчиками, установленными на контактных поверхностях, корпус и фаланги пальцев выполнены из однотипных модулей в виде нижней и верхней платформ, каждая из которых содержит опорную площадку и не менее трех крепежных площадок, причем каждая из крепежных площадок связана с соседними посредством телескопических стержней и с опорными площадками посредством управляемых стержней, содержащих электроприводы, редукторы, датчики перемещения и датчики силы, при этом верхняя и нижняя платформы связаны между собой посредством шести ног-актуаторов, содержащих нижние шарниры, прикрепленные к крепежным площадкам нижней платформы, и верхние шарниры, прикрепленные к крепежным площадкам верхней платформы, и линейные электроприводы с редукторами, датчиками перемещения и датчиками силы, при этом тактильные датчики установлены на внешних поверхностях крепежных площадок.
Основным недостатком такого устройства является недостаточная надежность захвата транспортируемых объектов из-за невозможности адаптации жесткости захвата к весу и хрупкости транспортируемого объекта.
Задачей изобретения является повышение надежности захвата транспортируемых объектов за счет расширения диапазона размера и хрупкости поверхностей перемещаемых объектов.
Технический результат состоит в повышении эффективности доставки транспортируемых объектов, в том числе с повышенной хрупкостью.
Предлагаемое техническое решение является усовершенствованием устройства по патенту №26242178, и решает поставленную задачу за счет того, что между фалангами пальцев, в том числе между фалангами пальцев, примыкающих к корпусу, и корпусом, установлены модули с управляемой жесткостью, а в систему управления введен блок управления жесткостью, выход которого электрически связан с входами управления модулей с управляемой жесткостью.
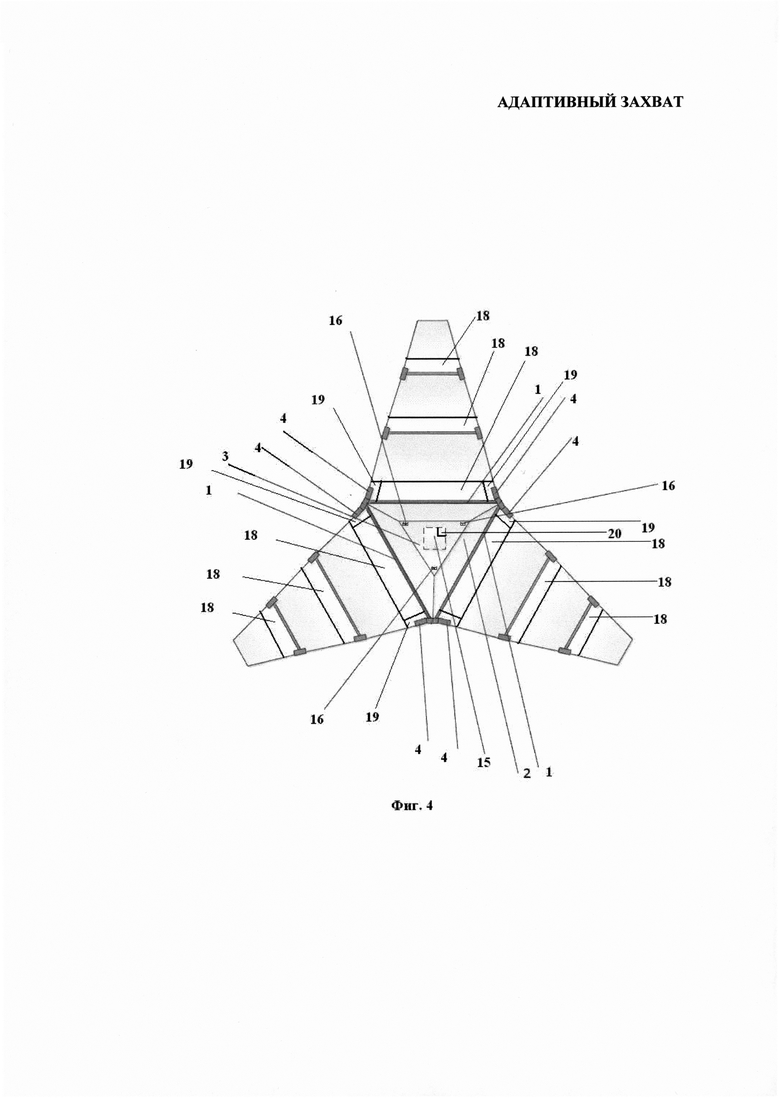
Изложенная сущность изобретения поясняется чертежами, где на фиг. 1 представлен вид однотипного модуля корпуса и фаланг, на фиг. 2 - общий вид пальцев, на фиг. 3 - общий вид захвата с независимым креплением фаланг пальцев, на фиг. 4 - общий, вид захвата с зависимым креплением фаланг пальцев.
Корпус (в дальнейшем именуемый для наглядности ладонью) и фаланги пальцев выполнены в виде отдельных однотипных модулей, схема которого представлена на фиг. 1. Модуль включает нижнюю 1 и верхнюю 2 платформы, каждая из которых содержит опорную площадку 3 и не менее трех крепежных площадок 4. Опорные площадки 3 через шарниры 5 соединены управляемыми стержнями 6 с приводами 7 и через шарниры 8 с крепежными площадками 4, что позволяет изменять размер и форму платформ 1 и 2. Нижняя 1 и верхняя 2 платформы связаны между собой шестью ногами-актуаторами 9 с приводами 10, через нижние 11 и верхние 12 шарниры. Крепежные площадки 4 связаны с соседними телескопическими стержнями 13. Приводы 10 снабжены редукторами, датчиками перемещения и датчиками силы (на чертеже не указаны).
На внешних поверхностях крепежных площадок 4 модулей фаланг пальцев расположены тактильные датчики 14.
На опорной площадке 3 верхней платформы 2 модуля, именуемого, по аналогии с человеческой рукой ладонью, с внутренней стороны расположена система управления 15, а на внешней поверхности расположены тактильные датчики 16.
Для решения поставленной задачи в систему управления 15 введен блок управления жесткостью 17, выходы которого связаны со входами модулей с управляемой жесткостью 18 (на фиг. 1 невидны), установленных между фалангами пальцев и, в том числе, между фалангами пальцев, примыкающих к ладони, и ладонью..
Пальцы устройства выполнены следующим образом (фиг. 2).
К крепежным площадкам 4 верхних платформ 2 модулей первых фаланг пальцев присоединяются крепежные площадки 19 первого модуля с управляемой жесткостью 18, а к крепежным площадкам 20 этого модуля присоединяются крепежные площадки 4 нижних платформ 1 модулей вторых фаланг. К крепежным площадкам 4 верхних платформ 2 модулей вторых фаланг присоединяются крепежные площадки 19 второго модуля с управляемой жесткостью 18, а к крепежным площадкам 20 этого модуля присоединяются крепежные площадки 4 нижних платформ 1 модулей третьих фаланг. Количество фаланг и пальцев при необходимости может меняться как в большую, так в меньшую сторону.
Крепление пальцев к ладони может быть двух типов: независимым (фиг. 3) и зависимым (фиг. 4)
При независимом креплении фаланг пальцев (фиг. 3) с каждой крепежной площадкой 4 верхней платформы 2 модуля ладони закрепляются крепежные площадки 19 третьих модулей с управляемой жесткостью 18, а крепежные площадки 20 этих модулей закрепляются с крепежными площадками 4 нижних платформ 1 модулей первых фаланг пальцев.
При зависимом креплении фаланг пальцев (фиг. 4) с двумя крепежными площадками 4 верхней платформы 2 модуля ладони закрепляются две крепежные площадки 19 третьих модулей с управляемой жесткостью 18, а крепежные площадки 20 этих модулей закрепляются с крепежными площадками 4 нижних платформ 1 модулей первых фаланг пальцев.
Работа устройства.
Система управления 15 с помощью входящей в его состав системы технического зрения оценивает размеры и форму объекта транспортировки. Затем по командам из системы управления 15 с помощью приводов 7 стержней 6 платформы 2 модуля ладони изменяется ее размер в соответствии с размером транспортируемого объекта, с помощью приводов 10 ног-актуаторов 9 модулей фаланг пальцев изменяется длина пальцев в соответствии с размером транспортируемого объекта и с помощью приводов 7 стержней 6 модулей платформ 1 и 2 модулей фаланг пальцев изменяются их ширина и форма в соответствии с размером и формой транспортируемого объекта. Таким образом происходит адаптация захвата под размер и форму транспортируемого объекта.
Далее по командам из системы управления 15 производится перемещение устройства в точку захвата и с помощью приводов 10 ног-актуаторов 9 модуля ладони по командам из системы управления 15 центр платформы 2 модуля ладони с использованием корректирующих сигналов от тактильных датчиков 16 этой платформы вводится в соприкосновение с захватываемым объектом. Наконец, по командам из системы управления 15 с помощью приводов 10 ног-актуаторов 9 модулей фаланг пальцев последние с использованием корректирующих сигналов от тактильных датчиков 14 платформ 1 и 2 модулей фаланг пальцев последние вводятся в соприкосновение с захватываемым объектом.
Требуемое усилие захвата развивается приводами 10 ног-актуаторов 9 модулей фаланг пальцев и приводов 7 стержней 6 платформ 1 и 2 модулей фаланг пальцев в соответствии с сигналами из системы управления 15 и с корректирующими сигналами от датчиков силы в ногах-актуаторов 9 и стержнях 6 модулей платформ 1 и 2 модулей фаланг пальцев.
Для повышения надежности захвата объекта с учетом адаптации жесткости захвата к весу и хрупкости поверхности объекта по командам из блока управления жесткостью 17 увеличивается жесткость модулей с управляемой жесткостью 18. И уже после этого по командам из системы управления 15 транспортируемый объект поднимается и перемещается в требуемую точку отгрузки.
Таким образом, производится доставка транспортируемых объектов в точку отгрузки с высокой эффективностью и надежностью.



Изобретение относится к устройствам захвата и предназначено для подъема и транспортировки объектов произвольной формы в автоматизированном режиме. Захват содержит систему управления и электромеханическую систему, включающую корпус с приводами и установленными на нем пальцами, каждый из которых состоит из фаланг с тактильными датчиками, установленными на контактных поверхностях. Корпус и фаланги пальцев выполнены из однотипных модулей с возможностью адаптации к размерам перемещаемых объектов. Между фалангами пальцев и между фалангами пальцев, примыкающих к корпусу, и корпусом установлены модули с управляемой жесткостью, а система управления снабжена блоком управления жесткостью, выход которого электрически связан с входами управления модулей с управляемой жесткостью. Изобретение обеспечивает повышение надежности захвата транспортируемых объектов за счет адаптации жесткости захвата к весу и хрупкости транспортируемого объекта. 4 ил.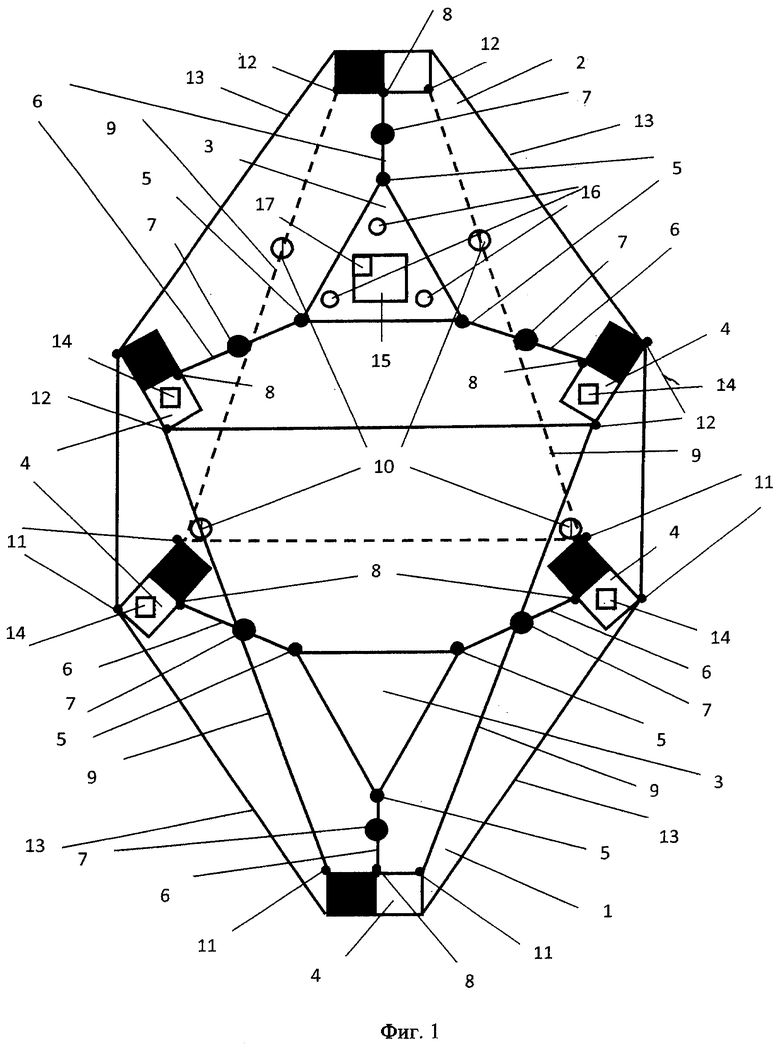
Адаптивный захват манипулятора, содержащий систему управления и электромеханическую систему, включающую корпус с приводами и установленными на нем пальцами, каждый из которых состоит из фаланг с тактильными датчиками, установленными на контактных поверхностях, корпус и фаланги пальцев выполнены из однотипных модулей в виде нижней и верхней платформ, каждая из которых содержит опорную площадку и не менее трех крепежных площадок, причем каждая из крепежных площадок связана с соседними посредством телескопических стержней и с опорными площадками посредством управляемых стержней, содержащих электроприводы, редукторы, датчики перемещения и датчики силы, при этом верхняя и нижняя платформы связаны между собой посредством шести ног-актуаторов, содержащих нижние шарниры, прикрепленные к крепежным площадкам нижней платформы, и верхние шарниры, прикрепленные к крепежным площадкам верхней платформы, и линейные электроприводы с редукторами, датчиками перемещения и датчиками силы, при этом тактильные датчики установлены на внешних поверхностях крепежных площадок, отличающийся тем, что между фалангами пальцев и между фалангами пальцев, примыкающих к корпусу, и корпусом установлены модули с управляемой жесткостью, а система управления снабжена блоком управления жесткостью, выход которого электрически связан с входами управления модулей с управляемой жесткостью.
| АДАПТИВНЫЙ ЗАХВАТ | 2016 |
|
RU2624278C1 |
| АДАПТИВНОЕ ТРЕХПАЛОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 2011 |
|
RU2481942C2 |
| US 6247738 B1, 19.06.2001 | |||
| Устройство для непрерывного изготовления резиновых изделий | 1988 |
|
SU1595658A2 |

