ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области медицинской техники в сфере протезирования и биоэлектрического протезирования, а именно к протезированию верхних конечностей. В частности, настоящее изобретение описывает техническое решение, относящееся к устройству модуля пальца и кисти биоэлектрического протеза верхней конечности.
ГЛОССАРИЙ
Протез – искусственная замена ампутированной или поврежденной части тела, управляемая посредством различных механизмов и предназначенная для выполнения специальных действий и / или воссоздания внешнего вида конечности пользователя.
Пользователь – лицо или объект, которое использует протез для выполнения конкретной функции.
Модуль – самостоятельная часть конструкции протеза верхней конечности, выполняющая определенный набор функций.
Привод – механизм для передачи вращательного движения от одного места к другому, включающий в себя по крайней мере один мотор и один редуктор, или мотор-редуктор, трансмиссию, а также узлы крепления.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известны биоэлектрические протезы, в которых реализуются функции подвижности пальцев различными способами. Наиболее близким к рассматриваемому решению являются конструкции, в которых подвижность каждого пальца кисти обеспечивается за счет отдельного для каждого пальца мотор-редуктора, включенного в конструкцию пальца, или мотора с редуктором, который располагается в корпусе пальца или в ладони кисти. Наличие у каждого пальца собственного независимого мотора и привода позволяет обеспечить выполнение протезом жестов и отдельных операций, имитирующих естественные движения пальцев и кисти человека.
Также известны протезы, в которых движители используются для одновременного движения двух или четырех пальцев, скрепленных между собою неподвижно. Пальцы компонуются в группы, что делает протез более простым и легким, то есть удобным в применении. Недостатком таких технических решений являются трудности при изготовлении компактного протеза, поскольку использование доступных в современных условиях массивных двигателей ограничивает минимально возможный размер модуля пальца протеза, при этом существуют ограничения по взаимному расположению шарниров, позволяющих осуществить крепление пальцев к протезу кисти, а также ограничивается и набор возможных жестов и движений, которые может выполнить протез.
Между тем, производители всего мира стремятся к тому, чтобы сделать протез легче и компактнее - чтобы он по массе и габариту соответствовал массе и габарита собственной руки пользователя - в этом случае пользование протезом не приводит к искривлению позвоночника, дисбалансу в опорно-двигательной системе, лучше воспринимается самим пользователем. Невозможность миниатюризировать рабочие механизмы протеза, не потеряв при этом в надежности и прочности конструкции, существенно сдерживает развитие детского протезирования. До настоящего времени не найдены какие-либо оптимальные формы и конструктивные решения, которые бы позволили создать протез, полностью имитирующий размеры и функции руки человека, но такая задача остаётся очень актуальной.
В современном протезировании используются как правило простые механизмы передачи движения: цилиндрические редукторы с приводом на тяги, ведущие к блокам пальцев; передачи винт-гайка с приводом на тяги пальцев, тросиковые передачи.
Известны и более совершенные механизмы пальцев биоэлектрических протезов, в которых используются цилиндрические червячные передачи, например, патент № US9387095B2 на изобретение “Prosthetics and orthotics”, дата публикации: 2015-07-09. Данное решение раскрывает конструкцию пальца, при которой привод располагается в корпусе пальца и выступает за габариты червячного венца. Такое расположение привода позволяет обеспечить возможность движения пальцем независимо от других и при использовании существующих миниатюрных моторов может обеспечить габарит пальца, близкий к пальцу взрослого человека. В то же время, сама передача - в узле крепления к модулю кисти сделана так, что общий габарит кисти не соответствует естественному - наличие на кисти выступающих элементов является нерациональным использованием пространства и ведет к росту габаритов модуля пальца или снижению его несущей способности. Таким образом, недостаток данного технического решения заключается в том, что протез кисти с таким решением обладает увеличенными габаритами модулей пальцев или будет иметь пониженную несущую способность, что выражается в ухудшении внешнего вида протеза кисти в целом или его эксплуатационных качеств, а также усложняет использование конструкции для для протезов малых типоразмеров.
Из уровня техники также известны спироидные передачи сами по себе, но не в применении для изготовления протезов, в том числе изобретения № SU 364783 (дата публикации: 1972-12-28), SU 209167 (дата публикации: 1968-01-17), SU 1054602 (дата публикации: 1983-11-15), SU 1520278 (дата публикации: 1989-11-07) и другие, а также специализированные публикации по теме (например, Крайнев А.Ф. Словарь-справочник по механизмам. М.: Машиностроение, 1987. С. 433; ГОСТ № 22850-77. Передачи спироидные. Термины, определения и обозначения. М.: Издательство стандартов, 1978.).
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Техническая проблема, решаемая в заявленном изобретении, заключается в необходимости расширения функциональных возможностей протезов верхних конечностей за счет обеспечения защищенности элементов его механизма от попадания посторонних предметов и внешних воздействий, компактности такого механизма, уменьшения веса устройства в целом и повышения его нагрузочной способности при сохранении эстетичного внешнего вида устройства в составе конечного изделия - протеза верхней конечности. При этом, в отличие от остальных пальцев кисти, имеющих только одну степень свободы, большой палец кроме функции складывания должен выполнять функцию поворота вокруг продольной оси. Возможность поворота остальных пальцев также не исключается, но не является обязательной с точки зрения пользователей протеза.
Известные из уровня техники решения, основанные на использовании червячной передачи в модулях пальцев протезов кисти, требуют применения специальных конструктивных мер для соблюдения эстетического вида конструкции, вписывания в габариты человеческого пальца, и защиты зацепления от внешней среды. Это ведет к усложнению конструкции, росту массы и габаритов, усложняет повторное использование конструкции модуля пальца в протезах малых типоразмеров и требует других компромиссов с техническими показателями качества зубчатого зацепления таким как количество зубьев, одновременно участвующих в зацеплении, и другими конструктивными решениями. Применение червячной передачи накладывает ограничения на способы крепления тяги, связывающей нижнюю фалангу с неподвижной частью модуля пальца, т.к. пространство выше оси поворота нижней фаланги, в котором должно располагаться крепление тяги из геометрических условий, оказывается занято червячным венцом или передней опорой червяка. Еще один недостаток червячного зацепления заключается в том, что на червяке возникают значительные как радиальные так и осевые нагрузки, что требует применения подшипников, способных воспринимать их одновременно, в то время как миниатюрные подшипники качения, как правило, имеют малый запас несущей способности по одному из направлений. Это заставляет использовать в качестве опор червяка подшипники скольжения, что снижает общий КПД механизма.
Использование спироидной передачи для протезов пальца не раскрывалось ранее в уровне техники и неочевидно для среднего специалиста по следующим причинам: отсутствие открытых стандартов на геометрический синтез и расчет параметров спироидного зацепления, технологические трудности при изготовлении мелкомодульного спироидного венца методом обкатки на универсальных зуборезных станках, отсутствие открытых методик и программного обеспечения для построения трехмерных электронных моделей поверхностей зубьев данного типа передач, трудности технологии изготовления мелкомодульных спироидных венцов методом обработки на станках с ЧПУ.
Использование спироидной передачи для протезов кисти также не раскрывалось в силу вышеописанных причин, поскольку создание протеза кисти с модулями пальцев на спироидных передачах, требует расчета, моделирования и изготовления мелкомодульного спироидного зацепления.
Технический результат патентуемого изобретения заключается в создании конструкции протеза верхней конечности, отличающейся компактностью в плане общей компоновки протеза, при этом, малая ширина модуля пальца в районе шарнира нижней фаланги позволяет реализовывать малые типоразмеры кисти протеза верхней конечности. Крепление тяги верхней фаланги внутри пространства спироидной передачи уменьшает габариты модуля пальца и облегчает придание ему эстетичного внешнего вида, поскольку тяга оказывается скрыта внутри корпуса нижней фаланги. Возможность иметь одновременное зацепление двух спироидных зубчатых венцов с червяком обеспечивает большую нагрузочную способность при меньших габаритах, поскольку в два раза увеличивает количество зубьев участвующих в зацеплении с 3-4 до 6-8, что в свою очередь увеличивает несущую способность механизма. Т.к. передачу возможно выполнить двухвенцовой, радиальные силы на червяке от зацепления с двумя спироидными венцами оказываются скомпенсированы, и задняя опора червяка воспринимает только осевую нагрузку, что делает возможным применение упорного подшипника качения в качестве задней опоры червяка. Это позволяет иметь высокую несущую способность механизма без потерь в КПД в задней опоре. Кроме этого, поскольку зубья спироидных венцов обращены внутрь и видны только с торцов, обеспечивается придание протезу более эстетичного вида и защита зубчатого зацепления от попадания посторонних предметов и факторов внешней среды.
Заявленный технический результат обеспечивается за счет интеграции спироидного зубчатого сектора и несущего элемента, используемого для передачи движения в единую деталь - рычаг комбинированный или венец комбинированный, что снижает габариты и вес передачи и позволяет закрепить тягу нижней фаланги в корпусе спироидной передачи в пространстве внутри силуэта спироидной зубчатой передачи. При этом, мотор пальца теперь может располагаться как в корпусе самого пальца, так и в пределах корпуса кисти.
Использование спироидного приводного редуктора позволяет создать не только новые конструкции пальцев, но и новую конструкцию протеза кисти или модуля кисти протеза верхней конечности.
Модуль большого пальца со спироидной трансмиссией, предполагающий размещение привода поворота пальца внутри подвижной части пальца, состоит из электрического мотор-редуктора, корпуса, выполненного из алюминия, его сплавов, титана или его сплавов, в котором установлена по крайней мере одна втулка-адаптер для крепления привода и фиксации червяка от осевого смещения, при этом, втулка может быть выполнена зацело с корпусом мотор-редуктора, а также задней опоры червяка в виде подшипника скольжения, подшипника качения с угловым контактом или упорного подшипника качения, спироидного червяка цилиндрического или конического типа одно- и или многозаходного, передней опоры червяка в виде подшипника скольжения или подшипника качения, левого и правого спироидных зубчатых венцов, выполненных из нержавеющей стали с износостойким покрытием, углеродистой стали с антикоррозионным покрытием, бронзы, алюминиевого сплава со спецпокрытием или другого материала с похожими свойствами, установленных в корпусе на подшипниках скольжения или качения, при этом они могут быть выполнены зацело с несущими элементами - например, выступом под крепежные отверстия и/или полуосью. Комбинированные венцы могут быть связаны между собой, например, с помощью кронштейна, сопрягаемого с элементом протеза кисти. Декоративная накладка пальца крепится к корпусу привода и может быть выполнена из полиамида, композита на основе углеволокна, резины, силикона и их комбинаций. Таким образом, механизм поворота пальца целиком располагается внутри накладки пальца. Комбинированная конструкция спироидного зубчатого венца позволяет получать ширину модуля большого пальца в районе оси поворота нижней фаланги не превышающую 10-11 мм.
Модуль пальца со спироидной трансмиссией, предполагающий размещение привода внутри ладони протеза кисти, состоит из электрического мотор-редуктора, корпуса, выполненного из алюминия, его сплавов, титана или его сплавов, в котором установлена по крайней мере одна втулка-адаптер для крепления привода и фиксации червяка от осевого смещения, при этом, втулка может быть выполнена зацело с корпусом мотор-редуктора. Червяк находясь в зацеплении со сприроидными зубьями, выполненными на паре комбинированных рычагов, приводит в движение четырехзвенный рычажный механизм, образованный корпусом модуля пальца, парой комбинированных спириодных рычагов, тягой и верхней фалангой пальца. Рычаги могут быть соединены друг с другом и с накладкой, например, с помощью дистанционных втулок и крепиться в корпусе на полуосях выполненных зацело на детали рычага, на корпусной детали, или на осях, являющихся отдельными деталями. Накладка может быть выполнена из пластика, карбонового композита, композита на основе стекловолокна, резины, силикона или их комбинаций. Верхняя фаланга крепится на поворотной оси к комбинированным рычагам нижней фаланги и связывается тягой с корпусной деталью модуля пальца, при этом сопряжение тяги и корпуса пальца происходит внутри пространства спироидной передачи. Комбинированная конструкция спироидного зубчатого рычага позволяет получать ширину модуля пальца в районе оси поворота нижней фаланги не превышающую 10-11 мм.
Модуль кисти со спироидным приводным редуктором состоит из рамы, выполненной из алюминиевого или титанового сплава методом литья, штамповки, сварки или аддитивным методом. К раме крепятся модули по крайней мере двух пальцев со спироидными приводными редукторами, модуль активной или пассивной ротации большого пальца, к которому крепится модуль большого пальца со спироидным приводным редуктором. К раме крепятся защитно-декоративные накладки, выполненные например из карбонового композита, композита на основе стекловолокна, полиамида, резины или их комбинаций. Также к раме крепится по крайней мере один адаптер для установки протеза кисти на гильзу пациента, или адаптер для сопряжения с другими модулями такими как, например, модуль сгиба запястья, модуль активного либо пассивного поворота запястья, модуль быстрой смены протеза кисти. К внутренним ребрам накладок могут крепиться платы управления двигателями пальцев, на платы может быть установлен магнитный датчик обратной связи по положению нижней фаланги, в этом случае плата располагается так что ось поворота нижней фаланги пальца с закрепленным в ней магнитом оказывается напротив микросхемы датчика и, таким образом, определяется абсолютное угловое положение каждого пальца В приводе большого пальца плата драйвера с датчиком может крепиться внутри накладки большого пальца. Использование модулей пальцев со сприроидной зубчатой трансмиссией позволяет получать модули кисти с размером в самой широкой части ладони в диапазоне от 70 до 95 мм, без изменения параметров зубчатого зацепления, параметров корпуса привода пальца, и качественных изменений конструкции модулей пальца. Это достигается за счет того, что комбинированная конструкция спироидного зубчатого рычага позволяет модулям пальцев иметь малую ширину в районе шарнира нижней фаланги, что является лимитирующим фактором для минимально возможной ширины протеза кисти и его габаритов в целом. Управление протезом обеспечивается по сигналам расположенных в гильзе или иной конструктивной части протеза миоэлектрических датчиков, также в гильзе может быть расположен аккумулятор.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее решение поясняется ссылками на фигуры, на которых приведено следующее.
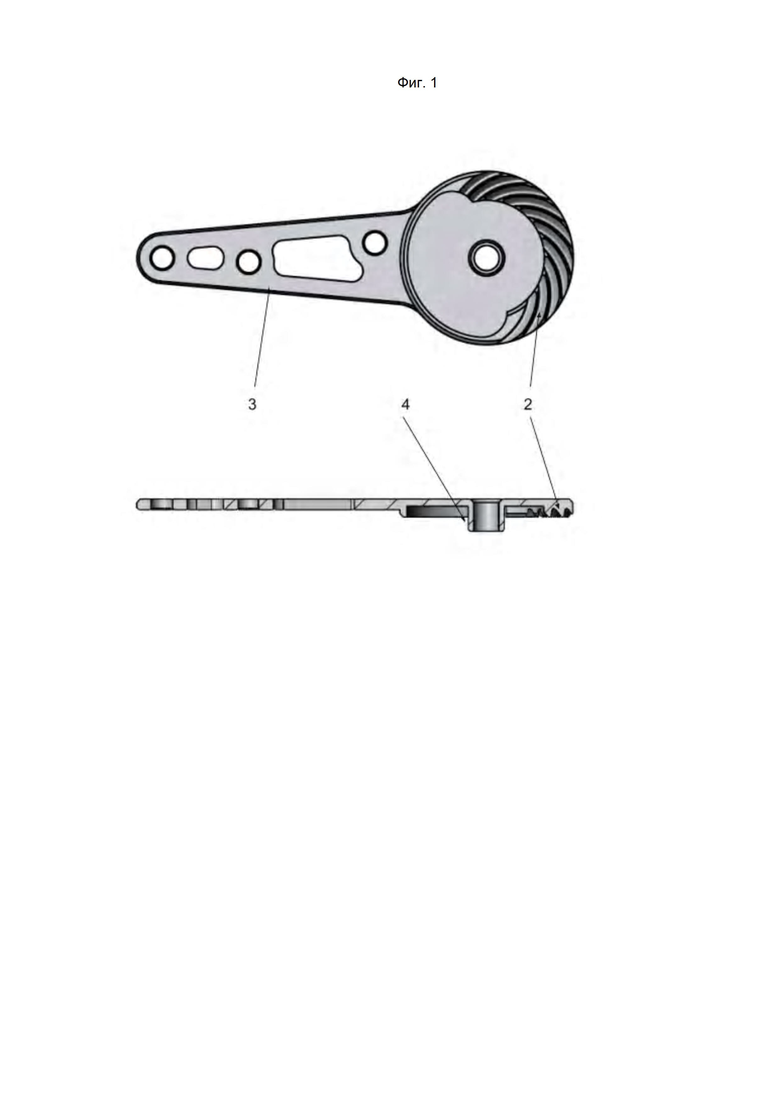
Фиг. 1 - рычаг комбинированный,
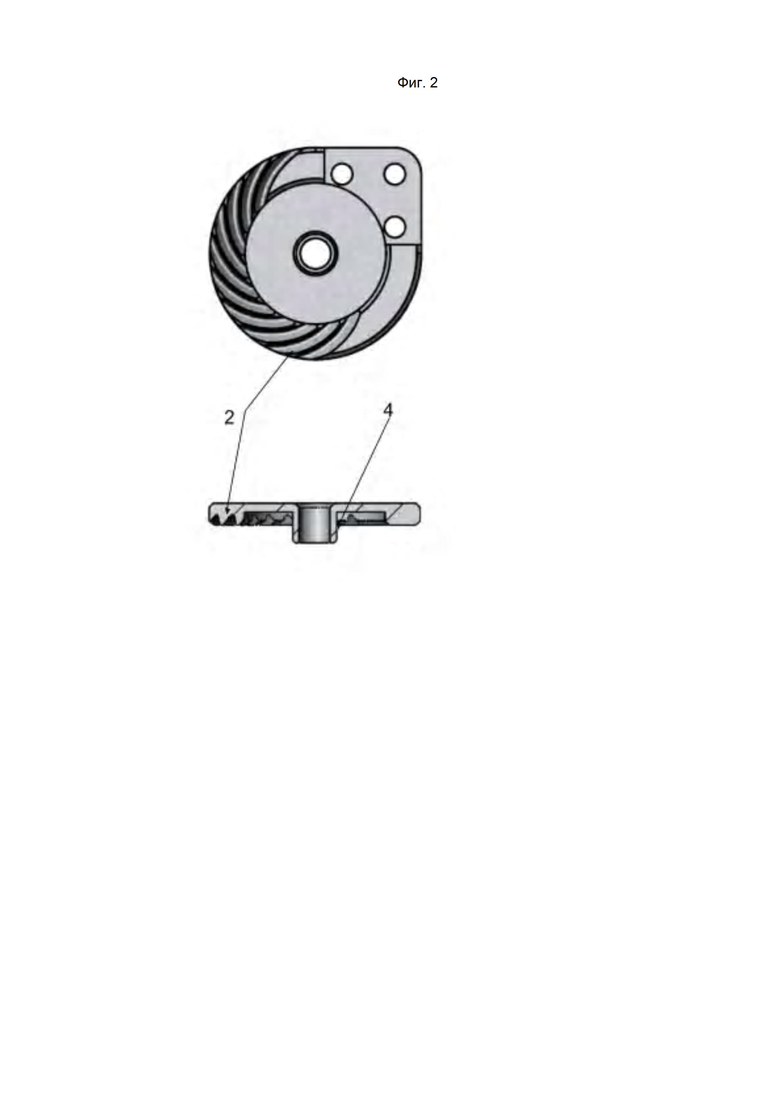
Фиг. 2 - венец комбинированный,
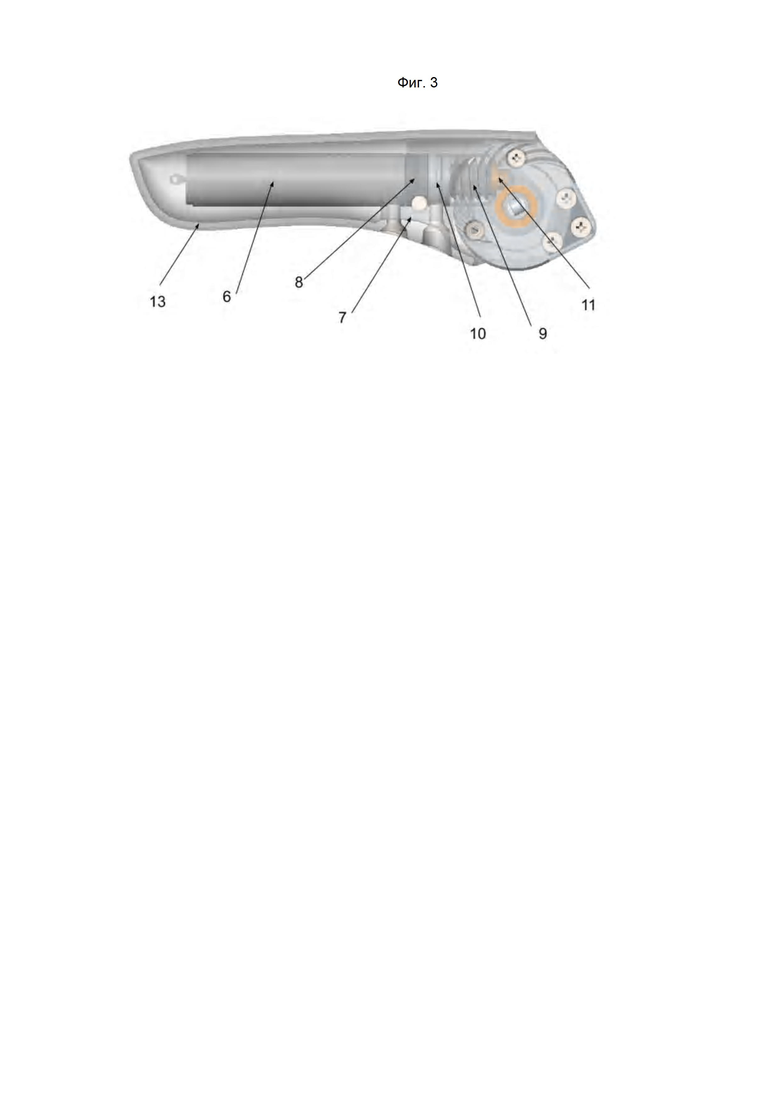
Фиг. 3 - модуль большого пальца (вид сбоку),
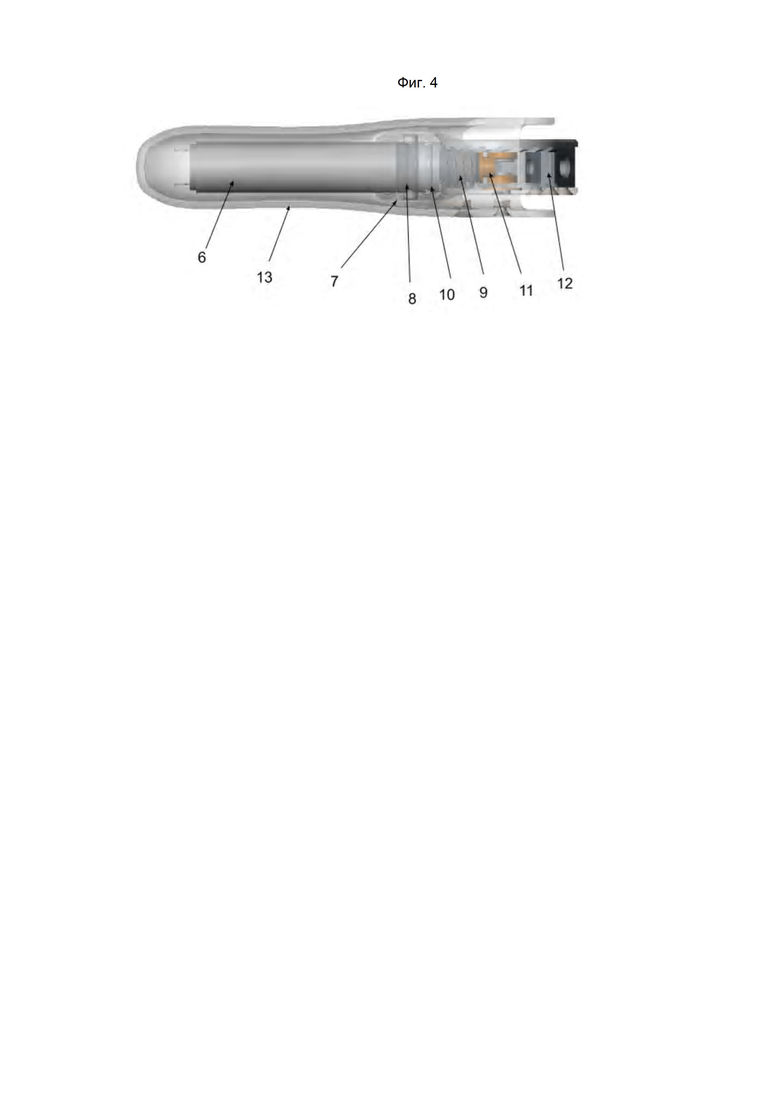
Фиг. 4 - модуль большого пальца (вид сверху),
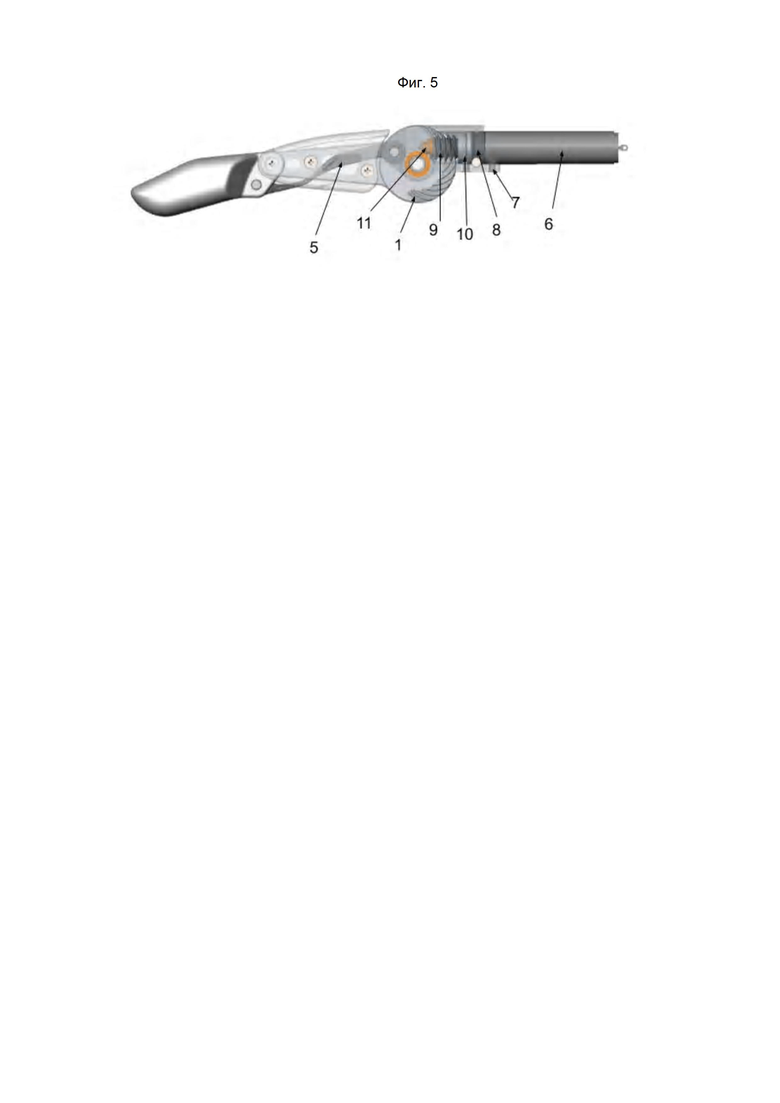
Фиг. 5 - модуль пальца (вид сбоку),
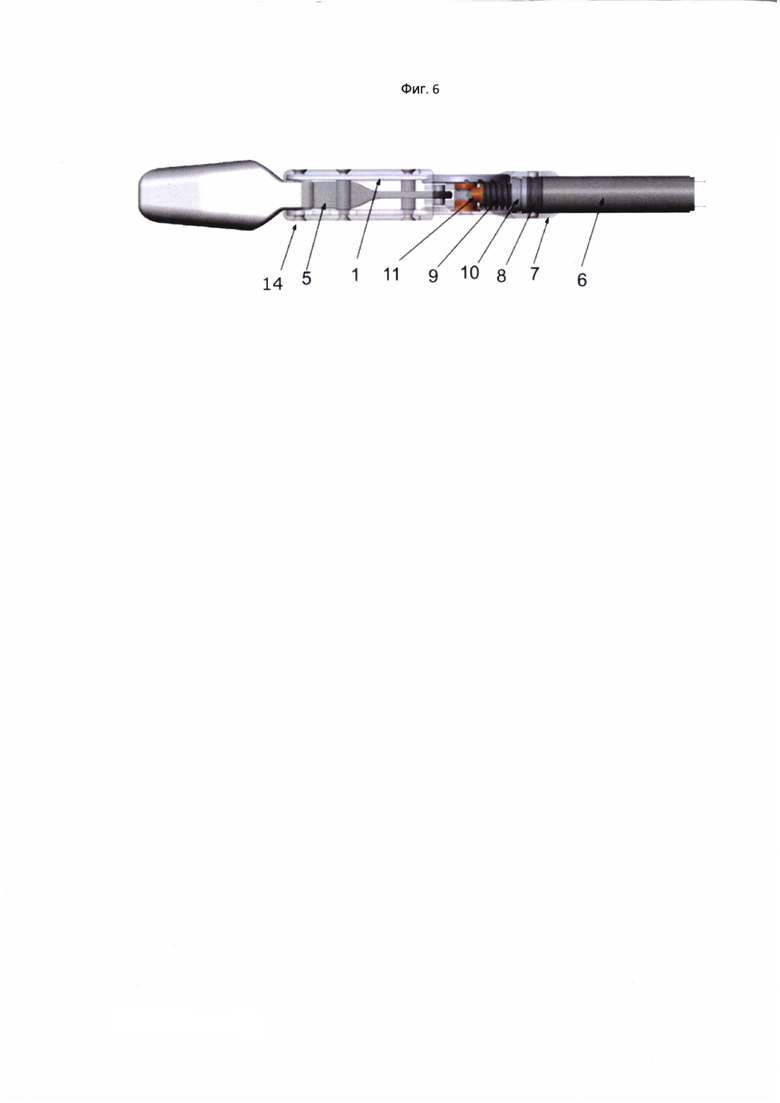
Фиг. 6 - модуль пальца (вид сверху),
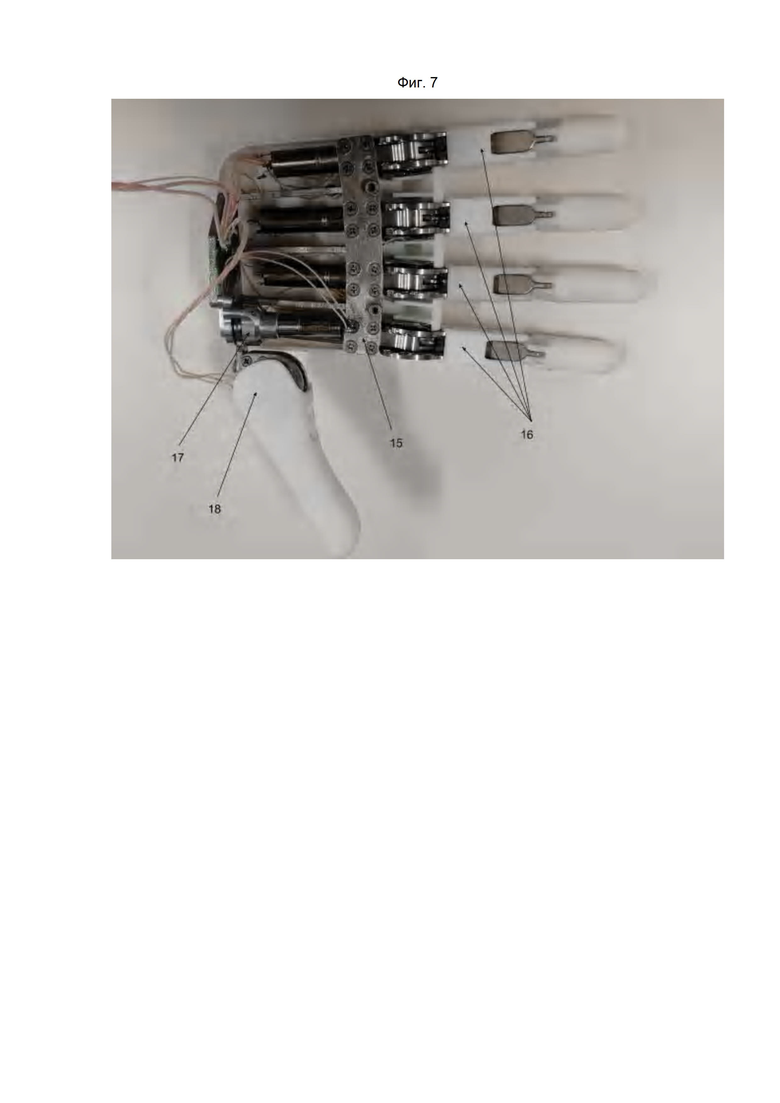
Фиг. 7 - модуль кисти (общий вид).
1 - Рычаг комбинированный со спироидным зубчатым венцом; 2 - спироидный зубчатый сектор; 3 - рычаг; 4 - полуось; 5 - тяга нижней фаланги; 6 - мотор-редуктор; 7 - корпус; 8 - втулка-адаптер; 9 - червяк; 10 - подшипник качения; 11 - подшипник скольжения; 12 - кронштейн; 13 - накладка большого пальца; 14 - поворотная ось; 15 - рама кисти; 16 - модуль пальца со спироидной трансмиссией; 17 - модуль ротации большого пальца; 18 - модуль большого пальца.
ОСУЩЕСТВЛЕНИЕ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Для решения обозначенной проблемы был разработан модуль пальца с двухвенцовой спироидной зубчатой передачей, в которой в каждой из деталей рычаг комбинированный (1) интегрирован элемент зубчатого зацепления - спироидный зубчатый сектор (2), и несущие элементы детали - рычаг (3), и полуось (4), что позволило закрепить тягу нижней фаланги (5) в корпусе спироидной передачи в пространстве внутри силуэта спироидной зубчатой передачи. Используемая спироидная передача будучи выполнена двухвенцовой - с двумя спироидными зубчатыми секторами (2) на двух несущих деталях (1) также увеличивает количество зубьев, одновременно находящихся в зацеплении.
Возможность получения при осуществлении изобретения технического результата подтверждается следующим образом:
Модуль большого пальца со спироидным приводным редуктором, предполагающий размещение привода поворота пальца внутри подвижной части пальца, состоит из электрического мотор-редуктора (6), корпуса (7), выполненного из сплава Д16Т, в котором установлены втулка-адаптер (8) для крепления привода и фиксации червяка (9) от осевого смещения, задней опоры червяка в виде упорного подшипника качения (10), цилиндрического однозаходного червяка, передней опоры червяка в виде подшипника скольжения (11), левого и правого спироидных зубчатых венцов из нержавеющей стали, установленных в корпусе на подшипниках скольжения, и выполненных зацело с несущими элементами - выступом под крепежные отверстия и полуосью. Комбинированные венцы связаны между собой с помощью кронштейна (12), сопрягаемого с приводом ротации большого пальца. Накладка большого пальца (13) крепится к корпусу привода и выполнена из полиамида.
Модуль пальца со спироидным приводным редуктором, предполагающий размещение привода внутри ладони протеза кисти, состоит из электрического мотор-редуктора (6), корпуса (7), выполненного из сплава Д16Т, в котором установлены втулка-адаптер (8) для крепления привода и фиксации червяка (9) от осевого смещения, задней опоры червяка в виде упорного подшипника качения (10), цилиндрического однозаходного спироидного червяка, передней опоры червяка в виде подшипника скольжения (11), левого и правого спироидных зубчатых венцов из нержавеющей стали, установленных в корпусе на подшипниках скольжения, и выполненных зацело с несущими элементами - рычагом (3) и полуосью (4). В пространстве между спироидными зубчатыми рычагами в корпусе крепится тяга (5) из нержавеющего сплава, связывающая неподвижный корпус (7) с верхней фалангой. Рычаги соединены друг с другом и с накладкой нижней фаланги с помощью дистанционных втулок. Накладка нижней фаланги выполнена из полиамида. Верхняя фаланга крепится на поворотной оси (14) к комбинированным рычагам нижней фаланги и связывается тягой с корпусной деталью.
Модуль кисти со спироидной трансмиссией модулей пальцев состоит из рамы (15), выполненной из алюминиевого сплава аддитивным методом. К раме крепятся модули пальцев со спироидным приводным редуктором (16), модуль активной ротации большого пальца (17), к которому крепится модуль большого пальца (18). К раме крепятся защитно-декоративные накладки, выполненные из полиамида.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ЭЛЕКТРОПРИВОДА ПАЛЬЦА БИОНИЧЕСКОЙ КИСТИ | 2023 |
|
RU2808344C1 |
| ИСКУССТВЕННАЯ БИОЭЛЕКТРИЧЕСКАЯ КИСТЬ РУКИ | 2021 |
|
RU2779492C1 |
| МЕХАНИЗМ СХВАТА ДЕТСКОГО ОДНОСХВАТОВОГО БИОЭЛЕКТРИЧЕСКОГО ПРОТЕЗА ВЕРХНЕЙ КОНЕЧНОСТИ | 2019 |
|
RU2719658C1 |
| Односхватный электромеханический протез кисти | 2020 |
|
RU2762842C1 |
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |
| КИСТЕВОЙ ПРОТЕЗ | 2006 |
|
RU2427348C2 |
| Механизм локтевого сустава роботизированного протеза плеча | 2022 |
|
RU2821186C2 |
| Устройство для перемещения деталей | 1973 |
|
SU645542A3 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| КИСТЕВОЙ ПРОТЕЗ | 2006 |
|
RU2387412C2 |
Группа изобретений относится к медицине, а именно к устройствам модуля пальца и кисти протезов. Устройство модуля пальца протеза выполнено со спироидной трансмиссией. Привод поворота пальца расположен внутри подвижной части пальца или внутри ладони протеза кисти. Спироидная трансмиссия имеет по меньшей мере один спироидный зубчатый венец по одну из сторон от оси червяка. В качестве задней опоры червяка спироидной трансмиссии используется упорный подшипник качения. Устройство модуля кисти состоит из по крайней мере одного модуля пальца со спироидной трансмиссией. Достигается увеличение нагрузочной способности протеза при меньших габаритах. 3 н. и 6 з.п. ф-лы, 7 ил.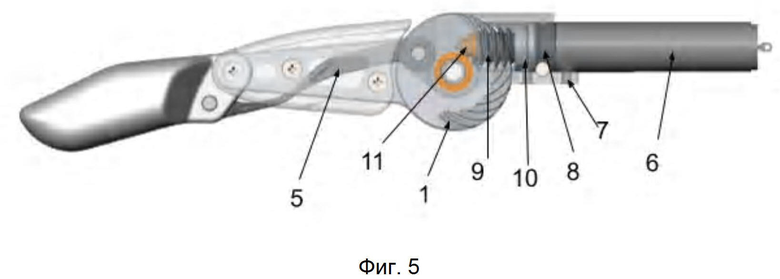
1. Устройство модуля пальца протеза со спироидной трансмиссией, привод поворота пальца которого расположен внутри подвижной части пальца.
2. Устройство по п. 1, отличающееся тем, что спироидная трансмиссия имеет по меньшей мере один спироидный зубчатый венец по одну из сторон от оси червяка.
3. Устройство по п. 1, отличающееся тем, что в качестве задней опоры червяка спироидной трансмиссии используется упорный подшипник качения.
4. Устройство модуля пальца протеза со спироидной трансмиссией, привод которого располагается внутри ладони протеза кисти.
5. Устройство по п. 4, отличающееся тем, что спироидная трансмиссия имеет по меньшей мере один спироидный зубчатый венец по одну из сторон от оси червяка.
6. Устройство по п. 4, отличающееся тем, что в качестве задней опоры червяка спироидной трансмиссии используется упорный подшипник качения.
7. Устройство по п. 4, отличающееся тем, что тяга нижней фаланги закреплена внутри пространства спироидной трансмиссии.
8. Устройство модуля кисти со спироидной трансмиссией, состоящее из по крайней мере одного модуля пальца со спироидной трансмиссией.
9. Устройство по п. 8, отличающееся тем, что используется плата управления двигателями с установленными на них датчиками обратной связи, которая расположена на внутренних ребрах защитно-декоративных накладок.
| WO 2003017876 A1, 06.03.2003 | |||
| ПРОТЕЗ КИСТИ | 2012 |
|
RU2506931C2 |
| US 3509583 A1, 05.05.1970 | |||
| US 5888246 A1, 30.03.1999 | |||
| US 9387095 B2, 12.07.2016 | |||
| CN 109620487 A, 16.04.2019. | |||

