Изобретение относится к области машиностроения, а именно к устройствам для управления пространственным положением объекта и может быть использовано в качестве манипуляционной системы активного экзоскелета-костюма капсульного типа.
Известно решение RU 2645804 С1 «Бионический экзоскелет», МПК B25J 11/00, содержащее каркас, расположенные в нем нити интерметаллида с памятью формы с прямой первоначальной формой и с Г-образной первоначальной формой и генератор электрического тока, соединенный с данными нитями. Генератор электрического тока содержит преобразователи механического движения в электрический ток, выполненные в виде неподвижного электрода, расположенного со стороны внешней поверхности каркаса экзоскелета, и подвижного электрода, рабочие поверхности электродов обращены друг к другу и выполнены из материалов, имеющих различную электронную проводимость, нити интерметаллида с памятью формы размещены в гибкой теплоэлектроизолирующей оболочке.
Недостатком этого технического решения является незащищенность кисти руки оператора от воздействия перемещаемого в пространстве объекта (RU 2645804 С1, http://new.fips.ru).
Известно решение RU 2665386 С1 «Пассивный реабилитационный экзоскелет», МПК А61Н 3/00, содержащее каркас с элементами крепления к туловищу, две пары тазобедренных и голеностопных рычагов, выполненных в форме пространственных оболочек, подвижно соединенных между собой и свободным концом тазобедренного рычага с каркасом, модули плечевого сустава, плеча, предплечья, запястья и кистей, соединенных шарнирно между собой и свободным концом модуля плечевого сустава с каркасом. Модули предплечья выполнены в виде двух прямых стержней, имеющих элементы пространственных шарниров на концах. Модуль запястья выполнен в виде пластины, изогнутой по форме запястья человека с элементами пространственных шарниров и соединенной подшипниками вращения с боковой плоскостью кисти через короткий запястный рычаг, выполненный в виде пластины, согнутой по форме боковой поверхности запястья. Кисть выполнена в виде пластины, имеющей форму криволинейной трапеции, с длинной стороны которой располагаются дугообразные прорези под суставы проксимальных фаланг человека, а ее профиль изогнут по форме человеческого запястья. Сверху пластины расположена площадка для крепления корпуса сервопривода, реализующего возвратно поступательные движения соединенного с ним подшипником вращения рычага сервопривода, представляющего собой металлическую закругленную с обеих сторон пластину с отверстиями на концах, свободным концом соединенного с осью вращения проксимальных фаланг. Ось вращения проксимальных фаланг выполнена в виде стержня в форме дуги, изогнутой по форме запястья человека, имеющей соединение с элементами проксимальных фаланг через подвижные подшипники. Элементы проксимальных фаланг выполнены в виде пластин в форме разомкнутых трубок, имеющих закругленное удлинение и изогнутых по форме проксимальных фаланг человека, соединенных подшипниками вращения со средними фалангами. Средние фаланги выполнены пластинчатыми в форме разомкнутых трубок, изогнутых по форме средних фаланг человека.
Недостатком этого технического решения является незащищенность кисти руки оператора от воздействия перемещаемого в пространстве объекта (RU 2665386 С1, http://new.fips.ru).
Из известных технических решений наиболее близким по назначению и технической сущности к заявляемому объекту является решение RU 2717046 С1 «Перчатка - экзоскелет с линейными актуаторами», МПК B25J 9/12, А61Н 1/02, содержащее линейные актуаторы по количеству пальцев на руке, модуль управления, который является источником питания моторов и управления направлением их вращения, ремни, кольца и напальчники для крепления перчатки на конечности и соединительные элементы для механической связи моторов с кольцами и напальчниками. Соединительные элементы являются гибкими штоками, выполненными в виде скрученных нитей, которые одними концами закреплены на валах моторов, размещенных на большом браслете, пропущены через сквозные отверстия в малом браслете и через проушины колец с обеспечением продольного расположения нитей вдоль предплечья и жесткого прикрепления их другими концами к напальчникам. Большой и малый браслеты выполнены с возможностью их крепления на предплечье с помощью ремней и соединены жесткой сцепкой, длина которой соответствует индивидуальному размеру предплечья.
Недостатком этого технического решения является незащищенность кисти руки оператора от воздействия перемещаемого в пространстве объекта (RU 2717046 С1, http://new.fips.ru).
Задача, на которую направлено заявленное решение, это создание конструкции манипуляционного модуля экзоскелета с адаптивным захватным устройством, имеющим сферическую систему координат, которая исключает воздействие перемещаемого в пространстве объекта на кисть руки оператора.
Сущность изобретения
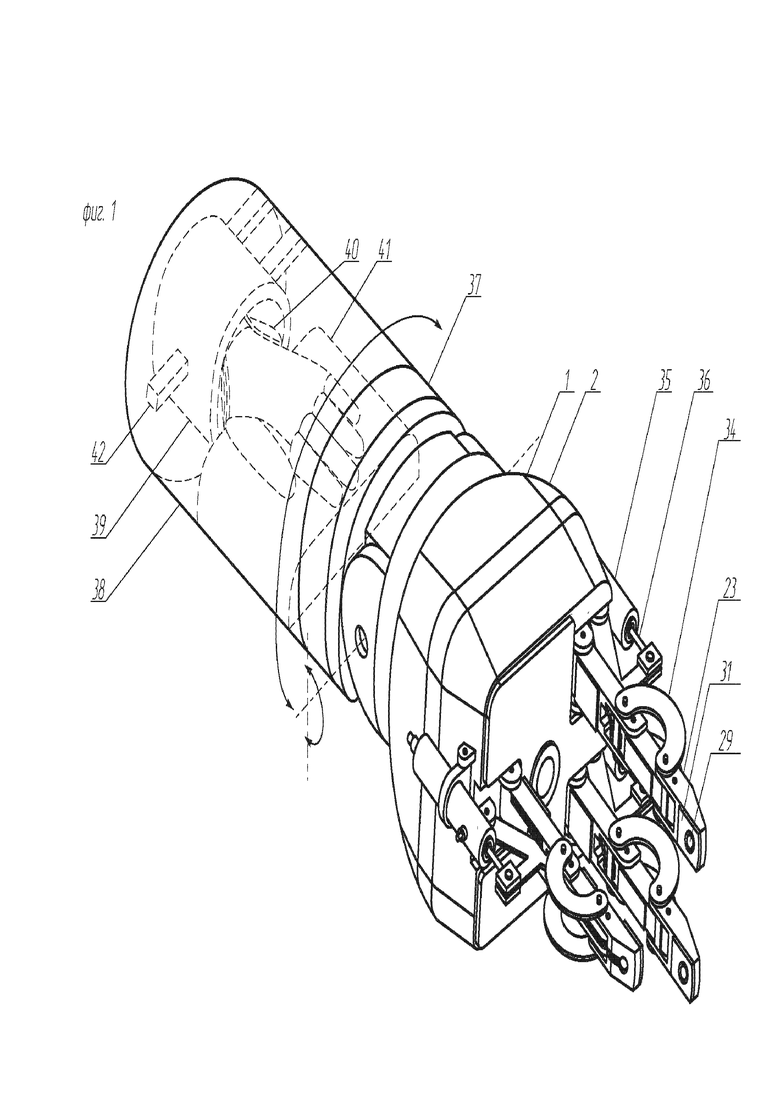
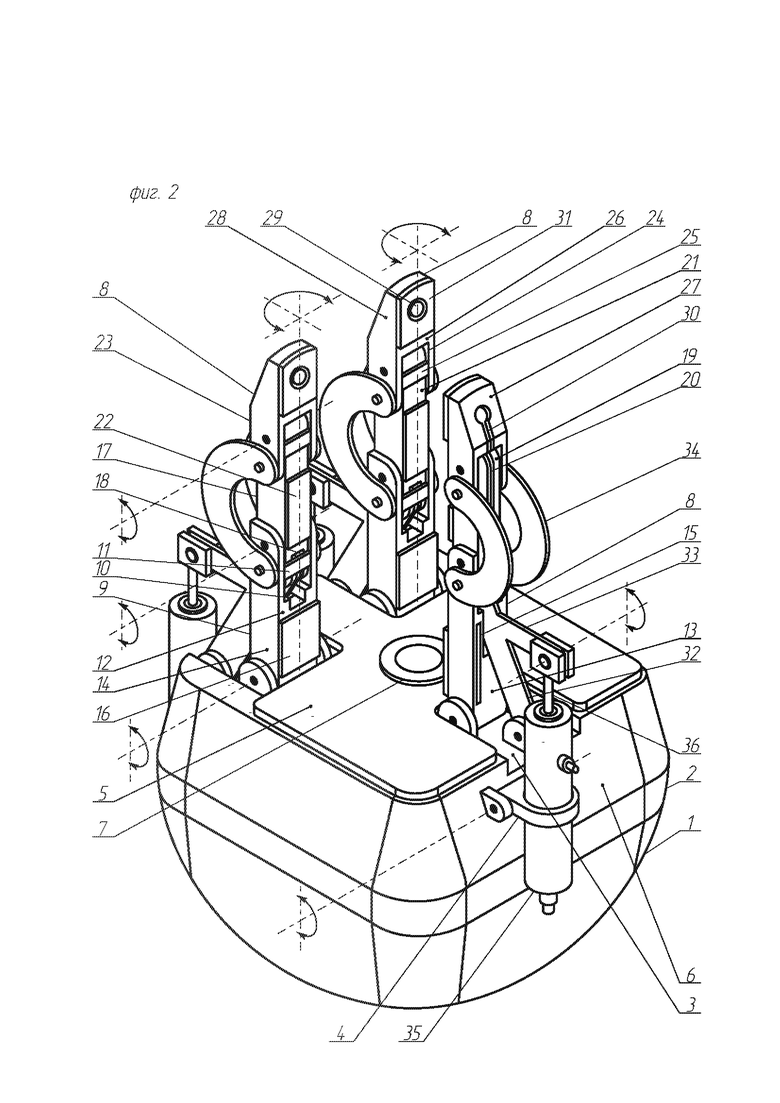
Поставленная задача решается за счет того, что захватное устройство (1) фиг. 2 манипуляционного модуля экзоскелета имеет три пальца (8), которые состоят из трех фаланг (9), (17), (23) и двух тяг (32), (34) шарнирно закрепленных между собой так, что оси вращения шарнирных соединений расположены параллельно друг другу. Первые фаланги (9) пальцев (8) и тяги (32) подвижно закреплены на опорных площадках (3) корпуса (2) захватного устройства (1). Две опорные площадки (3) расположены с одного края корпуса (2), а другая установлена с противоположного края корпуса (2) между двумя противоположно расположенными опорными площадками (3). Две опорные площадки (3), которые расположены с одного края, имеют возможность вращения вокруг оси направленной перпендикулярно к опорной площадке (3). Такое исполнение позволяет пальцам (8) адаптироваться к форме и размерам захватываемого объекта. Захватное устройство (1) фиг. 1 соединено с поворотным узлом (37), который имеет возможность вращения вокруг продольной оси и возможность вращения вокруг поперечной оси, что позволяет захватному устройству (1) перемещаться в пределах рабочей зоны имеющей форму сферы. Поворотный узел (37) соединен с приемной гильзой (38), которая имеет в своем внутреннем пространстве рукав (39) по внутренней поверхности которого выполнена воздушная подушка (40), а также панель управления (41) для управления захватным устройством (1) и поворотным узлом (37). Наличие приемной гильзы (38) в конструкции манипуляционного модуля экзоскелета, для размещения в ней руки оператора, и захватного устройства (1) позволяет исключить влияние перемещаемого в пространстве объекта на кисть руки оператора.
Манипуляционный модуль экзоскелета содержит захватное устройство (1) фиг. 1, поворотный узел (37), приемную гильзу (38).
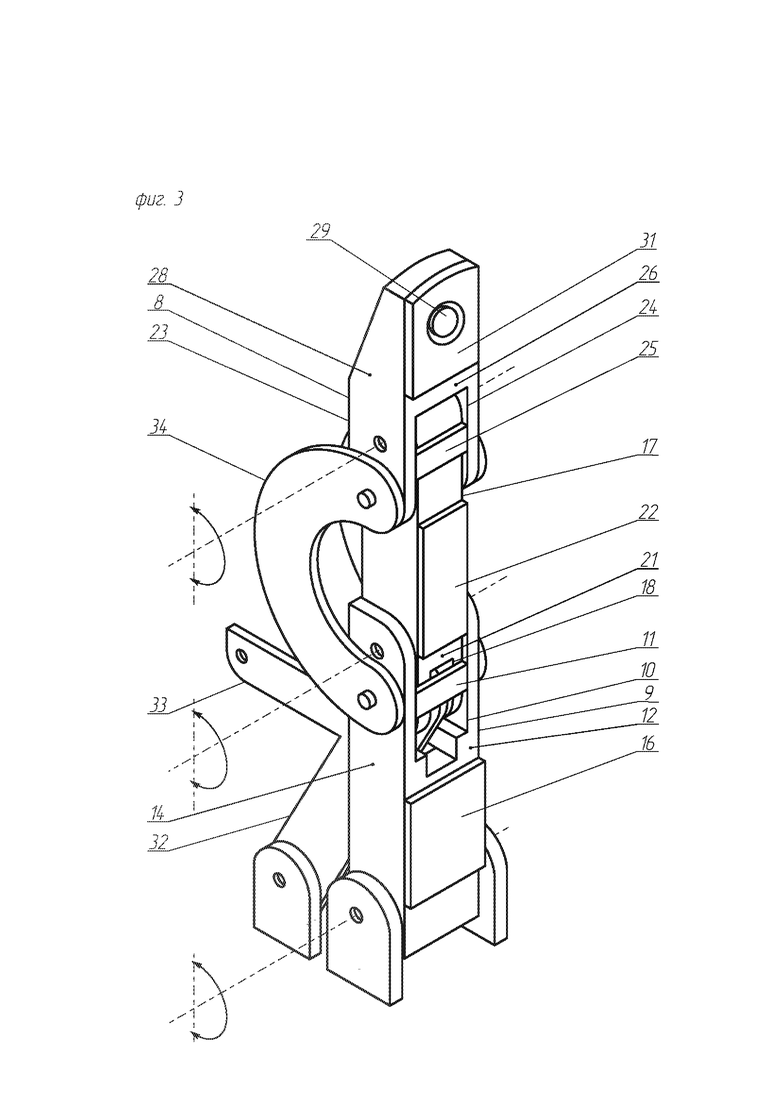
Захватное устройство (1) фиг. 2 имеет три пальца (8). Каждый палец (8) состоит из трех фаланг, которые могут поворачиваться относительно друг друга за счет шарнирных соединений, оси вращения которых расположены параллельно друг другу. Первые фаланги (9) пальцев (8) шарнирно соединены с опорной площадкой (3) корпуса (2) захватного устройства (1). С одного конца на поперечной грани первая фаланга (9) имеет паз (10) через противоположные стенки которого проходит ось вращения шарнирного соединения первой (9) и второй (17) фаланг пальца (8). Паз (10) имеет ограничитель (11) закрепленный на противоположных стенках паза (10), что позволяет внутренней поверхности (21) второй фаланги (17) в ее крайнем положении находиться параллельно относительно внутренней поверхности (12) первой фаланги (9). Вторая фаланга (17) пальца (8) относительно первой фаланги (9) расположена так, что ось вращения шарнирного соединения первой (9) и второй (17) фаланг пальца (8) размещена на расстоянии от поперечной грани второй фаланги (17), обеспечивая свободное вхождение части второй фаланги (17) в паз (10) первой фаланги (9). Поперечная грань второй фаланги (17) входящая в паз (10) первой фаланги (9) имеет паз (18) через противоположные стенки которого проходит ось вращения шарнирного соединения второй фаланги (17) пальца (8) и тяги (32). Одним концом тяга (32) с помощью подвижного соединения закреплена на опорной площадке (3) корпуса (2) захватного устройства (1), а другим концом входит в паз (18) второй фаланги (17) через противоположные стенки которого проходит ось вращения шарнирного соединения второй фаланги (17) пальца (8) и тяги (32. Тяга (32) имеет возможность вращения в пазу (18) относительно оси вращения шарнирного соединения второй фаланги (17) пальца (8) и тяги (32). Тяга (32) содержит выступ (33) выполненный с возможностью соединения со штоком (36) гидроцилиндра (35) привода движения тяги (32). Третья фаланга (23) пальца (8) с одного конца на поперечной грани имеет паз (24) через противоположные стенки которого проходит ось вращения шарнирного соединения третьей (23) и второй (17) фаланг пальца (8). Напротив паза (24) третьей фаланги (23) вторая фаланга (17) пальца (8) имеет ограничитель (25), что позволяет внутренней поверхности (26) третьей фаланги (23) в ее крайнем положении находиться параллельно относительно внутренней поверхности (21) второй фаланги (17). Третья фаланга (23) на внутренней поверхности (26) имеет тактильный датчик (29). В паз (24) третьей фаланги (23) свободно входит часть второй фаланги (17), которая закреплена в пазу (24) третьей фаланги (23) с помощью шарнирного соединения, ось вращения которого проходит через противоположные стенки паза (24). Третья (23) и первая (9) фаланги пальца (8) соединены между собой тягой (34), которая закреплена на их боковых поверхностях (28), (14) с помощью шарнирного соединения. Тяга (34) имеет полукруглую форму, что позволяет исключить соприкосновение тяги (34) с захваченным пальцами (8) объектом. Внешние поверхности (13), (19), (27) первой (9), второй (17), третьей (23) фаланг пальца (8) имеют канал (15), (20), (30) для укладки электротехнических изделий. Внутренние поверхности (12), (21), (26) первой (9), второй (17), третьей (23) фаланг пальца (8) имеют накладки (16), (22), (31) для повышения несущей способности пальца (8) за счет увеличения коэффициента трения поверхности. Выступ (33) тяги (32) с помощью шарнирного соединения соединен со штоком (36) гидроцилиндра (35). Гидроцилиндр (35) зафиксирован на боковой поверхности (6) корпуса (2) захватного устройства (1) со стороны опорной площадки (3) с помощью шарнирного крепления (4).
Корпус (2) фиг. 2 захватного устройства (1) имеет три опорные площадки (3) для шарнирного соединения пальцев (8) и тяг (32) с корпусом (2), две из которых расположены с одного края корпуса (2), а другая установлена с противоположного края корпуса (2) между двумя противоположно расположенными опорными площадками (3). Две опорные площадки (3), которые расположены с одного края, имеют возможность вращения вокруг оси направленной перпендикулярно к опорной площадке (3). Такое исполнение позволяет пальцам (8) адаптироваться к форме и размерам захватываемого объекта. Приводы поворота опорных площадок (3) расположены в корпусе (2) захватного устройства (1). На внешней поверхности (5) корпуса (2) установлен дальномер (7) или локатор. Со стороны опорных площадок (3) боковые поверхности (6) корпуса (2) имеют крепление (4) для гидроцилиндра (35). Крепление (4) для гидроцилиндра (35) соединено с боковой поверхностью (6) корпуса (2) с помощью шарнирного соединения, что позволяет креплению (4) поворачиваться вокруг оси вращения шарнирного соединения. Захватное устройство (1) фиг. 1 соединено с поворотным узлом (37).
Поворотный узел (37) фиг. 1 имеет две вращательные степени свободы, а именно вращение вокруг его продольной оси и вращение вокруг поперечной оси. Такое исполнение позволяет захватному устройству (1) перемещаться в пределах рабочей зоны имеющей форму сферы. Элементы, сообщающие вращательное движение поворотному узлу (37), находятся внутри корпуса поворотного узла (37). С одного конца поворотный узел (37) соединен с захватным устройством (1), с другого конца с приемной гильзой (38).
Приемная гильза (38) фиг. 1 представляет собой связующее звено между рукой человека и захватным устройством (1). Во внутреннем конструкционном пространстве приемной гильзы (38) на расстоянии от ее стенок с помощью стержней (42), один конец которых сопрягается со стенкой приемной гильзы (38), другой со стенкой рукава (39), установлен рукав (39) для размещения в нем предплечья оператора. По всей внутренней поверхности рукава (39) выполнена воздушная подушка (40), что способствует плотному обхвату предплечья оператора. Приемная гильза (38) во внутреннем конструкционном пространстве имеет панель управления (41), расположенную между рукавом (39) и поперечной гранью приемной гильзы (38), которая соединена с поворотным узлом (37). Панель управления (41) имеет устройства для управления захватным устройством (1) и поворотным узлом (37).
Технический результат заключается в создании конструкции манипуляционного модуля экзоскелета с адаптивным захватным устройством, имеющим сферическую систему координат, которая исключает воздействие перемещаемого в пространстве объекта на кисть руки оператора за счет того, что захватное устройство манипуляционного модуля экзоскелета имеет три пальца, которые состоят из трех фаланг и двух тяг, шарнирно закрепленных между собой так, что оси вращения шарнирных соединений расположены параллельно друг другу. Первые фаланги пальцев и тяги подвижно закреплены на опорных площадках корпуса захватного устройства. Две опорные площадки расположены с одного края корпуса, а другая установлена с противоположного края корпуса между двумя противоположно расположенными опорными площадками. Две опорные площадки, которые расположены с одного края, имеют возможность вращения вокруг оси направленной перпендикулярно к опорной площадке, что позволяет пальцам адаптироваться к форме и размерам захватываемого объекта. Захватное устройство соединено с поворотным узлом, который имеет возможность вращения вокруг продольной оси и возможность вращения вокруг поперечной оси, что позволяет захватному устройству перемещаться в пределах рабочей зоны имеющей форму сферы. Поворотный узел соединен с приемной гильзой, которая имеет в своем внутреннем пространстве рукав, по внутренней поверхности которого выполнена воздушная подушка, а также панель управления для управления захватным устройством и поворотным узлом. Наличие приемной гильзы в конструкции манипуляционного модуля экзоскелета, для размещения в ней руки оператора, и захватного устройства позволяет исключить влияние перемещаемого в пространстве объекта на кисть руки оператора.
Краткое описание чертежей:
на фиг. 1 - схематичное изображение манипуляционного модуля экзоскелета, Изометрический вид;
на фиг. 2 - схематичное изображение захватного устройства манипуляционного модуля экзоскелета. Изометрический вид;
на фиг. 3 - схематичное изображение пальца захватного устройства манипуляционного модуля экзоскелета. Изометрический вид.
Краткое описание конструктивных элементов:
1 - захватное устройство;
2 - корпус;
3 - опорная площадка;
4 - крепление;
5 - внешняя поверхность;
6 - боковая поверхность;
7 - дальномер;
8 - палец;
9 - первая фаланга;
10 - паз;
11 - ограничитель;
12 - внутренняя поверхность первой фаланги;
13 - внешняя поверхность первой фаланги;
14 - боковая поверхность первой фаланги;
15 - канал;
16 - накладка;
17 - вторая фаланга;
18 - паз;
19 - внешняя поверхность второй фаланги;
20 - канал;
21 - внутренняя поверхность второй фаланги;
22 - накладка;
23 - третья фаланга;
24 - паз;
25 - ограничитель;
26 - внутренняя поверхность третьей фаланги;
27 - внешняя поверхность третьей фаланги;
28 - боковая поверхность третьей фаланги;
29 - тактильный датчик;
30 - канал;
31 - накладка;
32 - тяга;
33 - выступ;
34 - тяга;
35 - гидроцилиндр;
36 - шток;
37 - поворотный узел;
38 - приемная гильза;
39 - рукав;
40 - воздушная подушка;
41 - панель управления;
42 - стержень.
Осуществление заявленного решения:
Заявленное решение работает следующим образом.
Манипуляционный модуль экзоскелета устанавливают на верхние конечности экзоскелета. Оператор размещает руку в приемной гильзе (38) фиг. 1 таким образом, чтобы кисть руки была над панелью управления (41), а в рукаве (39) располагалось предплечье. После установки руки в приемной гильзе (38), оператор активирует с помощью панели управления (41) воздушную подушку (40) для фиксации предплечья в рукаве (39).
Для схвата объекта с помощью команд с панели управления (41) фиг. 1 активируют гидравлический привод пальцев (8) фиг. 2 захватного устройства (1). Шток (36) гидроцилиндра (35) начинает движение вниз, тем самым приводя тягу (32) в движение, которая заставляет вторую фалангу (17) поворачиваться вокруг оси шарнирного соединения первой (9) и второй (17) фаланг пальца (8) во внутреннюю сторону, а первую фалангу (9) поворачиваться вокруг оси шарнирного соединения первой (9) фаланги и опорной площадки (3) во внешнюю сторону. При движении во внешнюю сторону первой фаланги (9) тяга (34) закрепленная на боковых поверхностях первой (9) и третьей (23) фаланг пальца (8) заставляет третью фалангу (23) поворачиваться вокруг оси шарнирного соединения второй (17) и третьей (23) фаланг во внутреннюю сторону захватывая объект. При захвате объекта небольшого размера с помощью команд с панели управления (41) поворачивают опорные площадки (3) двух пальцев (8) расположенных с одной стороны корпуса (2) захватного устройства (1).
Для управления пространственным положением объекта с помощью команд с панели управления (41) фиг. 1 активируют элементы привода, сообщающие вращательное движение поворотному узлу (37), что приводит к перемещению захватного устройства (1) в рабочем пространстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пассивный реабилитационный экзоскелет | 2017 |
|
RU2665386C1 |
| Перчатка-экзоскелет с линейными актуаторами | 2019 |
|
RU2717046C1 |
| АКТИВНЫЙ МОДУЛЬ СПИНЫ ЭКЗОСКЕЛЕТА | 2023 |
|
RU2825044C1 |
| Экзоскелет эндохирурга | 2018 |
|
RU2687897C1 |
| Экзоскелет | 2021 |
|
RU2760527C1 |
| ПРОТЕЗНЫЙ ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2472470C2 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| Экзоскелет | 2023 |
|
RU2830368C1 |
| Экзоскелет верхних конечностей | 2016 |
|
RU2629738C1 |
| Экзоскелет | 2023 |
|
RU2823489C1 |
Группа изобретений относится к области машиностроения и может быть использована в манипуляционных системах активного экзоскелета. Манипуляционный модуль содержит захватное устройство, поворотный узел и приемную гильзу, которая соединена через поворотный узел с захватным устройством и имеет во внутреннем пространстве рукав, установленный на расстоянии от стенок гильзы и по внутренней поверхности которого расположена воздушная подушка. Во внутреннем пространстве приемной гильзы расположена также панель управления захватным устройством и поворотным узлом. Захватное устройство имеет три пальца, которые состоят из трех фаланг и двух шарнирно закрепленных тяг. Корпус захватного устройства имеет три опорные площадки для шарнирного соединения пальцев и тяг с корпусом. Использование группы изобретений позволяет исключить возможность воздействия перемещаемого объекта на кисть руки оператора. 3 н.п. ф-лы, 3 ил.
1. Палец захватного устройства манипуляционного модуля экзоскелета, содержащий три фаланги, шарнирно соединенные между собой с возможностью вращения относительно параллельных друг другу осей вращения, отличающийся тем, что с одного конца на поперечной грани первая фаланга имеет паз, на противоположных стенках которого закреплены ось вращения шарнирного соединения первой и второй фаланг и ограничитель с возможностью обеспечения расположения внутренней поверхности второй фаланги в ее крайнем положении параллельно внутренней поверхности первой фаланги, причем ось вращения шарнирного соединения первой и второй фаланг расположена на расстоянии от поперечной грани второй фаланги, обеспечивающем свободное вхождение части второй фаланги в паз первой фаланги, при этом с одного конца на поперечной грани третья фаланга имеет паз, на противоположных стенках которого закреплена ось вращения шарнирного соединения третьей и второй фаланг, а напротив упомянутого паза третьей фаланги вторая фаланга имеет ограничитель с возможностью обеспечения расположения внутренней поверхности третьей фаланги в ее крайнем положении параллельно внутренней поверхности второй фаланги, причем поперечная грань второй фаланги, входящая в паз первой фаланги, имеет паз, в котором одним концом с возможностью вращения закреплена тяга, имеющая выступ, выполненный с возможностью соединения со штоком гидроцилиндра привода движения тяги, первая и третья фаланги соединены между собой тягой, которая имеет полукруглую форму и шарнирно закреплена на их боковых поверхностях, а на внешних поверхностях первой, второй и третьей фаланг имеется канал для укладки электротехнических изделий.
2. Захватное устройство манипуляционного модуля экзоскелета, содержащее корпус, выполненный с тремя опорными площадками, две из которых расположены с одного края корпуса с возможностью вращения вокруг соответствующей оси, расположенной перпендикулярно к опорной площадке, а другая установлена с противоположного края корпуса между двумя противоположно расположенными опорными площадками, и три пальца, каждый из которых шарнирно установлен на соответствующей опорной площадке, отличающееся тем, что каждый из упомянутых пальцев выполнен в виде пальца по п. 1, при этом на боковых поверхностях корпуса со стороны опорных площадок шарнирно установлены три гидроцилиндра, шток каждого из которых соединен с выступом тяги соответствующего пальца, а вторые концы упомянутых тяг шарнирно закреплены на соответствующих опорных площадках.
3. Манипуляционный модуль экзоскелета, содержащий захватное устройство, установленное на поворотном узле, соединенным с приемной гильзой, во внутреннем пространстве которой расположена панель управления, выполненная с возможностью управления захватным устройством и поворотным узлом, отличающийся тем, что захватное устройство выполнено в виде устройства по п. 2, при этом поворотный узел выполнен с возможностью вращения вокруг своей продольной оси и вращения вокруг поперечной оси, а во внутреннем пространстве приемной гильзы установлен рукав, расположенный на расстоянии от ее стенок с возможностью размещения в нем предплечья оператора, причем по всей внутренней поверхности рукава выполнена воздушная подушка.
| АДАПТИВНОЕ ТРЕХПАЛОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 2011 |
|
RU2481942C2 |
| Перчатка-экзоскелет с линейными актуаторами | 2019 |
|
RU2717046C1 |
| 0 |
|
SU190472A1 | |
| Прибор для разрезки недекальцинированного зуба и других твердых тканей | 1962 |
|
SU151487A1 |
| CN 103538077 A, 29.01.2014 | |||
| WO 2020082529 A1, 30.04.2020. | |||

