Изобретение относится к автоматизированным средствам поддержки принятия, в частности к устройствам поддержки принятия решений по управлению рисками, и может быть использовано на железнодорожном транспорте в автоматизированного управления рисками в области безопасности движения поездов.
Известны автоматизированная информационно-аналитическая система оценки финансовых рисков (RU 2246134 С2, G06Q 90/00, 10.02.2005 г.) и автоматизированная информационно-аналитическая система управления финансовыми рисками (RU 2396598 C1, G06Q 90/00, 10.08.2010 г.).
Известные системы осуществляют оценку и управление рисками, основанные на анализе исходных данных о рисковых событиях, возможных финансовых потерях, факторах риска.
Однако область их применения ограничивается исключительно финансовой деятельностью.
Наиболее близким аналогом является система минимизации рисков, содержащая средства хранения размеров ущерба, средство хранения вероятностей нарушения свойств сущностей угрозами, средства хранения прогнозируемого времени нарушения свойств сущностей в случае реализации угроз, средство хранения зависимостей между функциями контрмер, средства хранения показателей контрмер, блок определения стоимости набора контрмер, блок определения остаточного риска для набора контрмер, блок определения остаточного ущерба для набора контрмер, блок определения оптимального набора контрмер, средство вывода результатов работы системы (RU 2419155 C1, G06Q 90/00, 20.05.2011 г.).
Основными недостатками известной системы являются использование критерия сопоставления затрат на снижение риска и получаемой в результате этого выгоды, что не позволяет применить предлагаемые технические решения для задач управления безопасностью движения. Кроме того, известная система не оценивает риск на основе факторов риска, не оценивает эффективность реализованных мероприятий, направленных на снижение риска, и эффективность управления рисками в целом.
Технический результат изобретения заключается в повышении эффективности управления рисками за счет возможности оценки риска на основе факторов риска, а также оценки эффективности мероприятий по снижению риска и эффективности управления рисками в целом.
Технический результат достигается тем, что система для управления рисками в области безопасности движения поездов, содержит центральный процессор, блок отображения, вход которого подключен к первому выходу процессора, блок ввода/вывода, вход/выход которого подключен к первому выходу/входу процессора, вторым входом/выходом соединенного с входом/выходом интерфейса для сопряжения с аппаратно-программными устройствами интеграционного комплекса систем автоматизации работы ситуационного центра и автоматизированной системы управления безопасностью движения, формирователи баз данных соответственно допустимых уровней рисков, количества фактических нарушений безопасности движения, фактических ущербов от нарушений безопасности движения, параметров факторов, влияющих на возникновение нарушений безопасности движения, и параметров мероприятий по предотвращению нарушений безопасности движения, причем вход/выход формирователя баз данных количества фактических нарушений безопасности движения подключен к третьему выходу/входу процессора, а входы формирователей баз данных допустимых уровней рисков, фактических ущербов от нарушений безопасности движения, параметров факторов, влияющих на возникновение нарушений безопасности движения, и параметров мероприятий по предотвращению нарушений безопасности движения подключены соответственно ко второму, третьему, четвертому и пятому выходам процессора, модуль оценки фактического риска, входы/выходы которого подключены к соответствующим входам/выходам формирователей баз данных допустимых уровней рисков, количества фактических нарушений безопасности движения и фактических ущербов от нарушений безопасности движения, вход - к шестому выходу процессора, а первый выход - к первому входу процессора, модуль оценки гипотетического ущерба, первым входом соединенный с седьмым выходом процессора, а входами/выходами - с соответствующими выходами/входами формирователей баз данных количества фактических нарушений безопасности движения и фактических ущербов от нарушений безопасности движения, модуль оценки гипотетического риска, первый вход которого соединен с выходом модуля оценки гипотетического ущерба, второй вход - с восьмым выходом процессора, входы/выходы - с соответствующими выходами/входами формирователей баз данных допустимых уровней рисков и параметров факторов, влияющих на возникновение нарушений безопасности движения, а первый выход - со вторым входом процессора, модуль оценки остаточного риска, входами подключенный к девятому выходу процессора и ко вторым выходам соответственно модулей оценки фактического риска и гипотетического риска, входами/выходами - к соответствующим выходам/входам формирователей баз данных допустимых уровней рисков и параметров мероприятий по предотвращению нарушений безопасности движения, а первым выходом - к третьему входу процессора, модуль анализа динамики и прогнозирования рисков, входы которого соединены со вторыми выходам соответственно модулей оценки фактического риска, гипотетического риска, остаточного риска и с десятым выходом процессора, а выход - с четвертым входом процессора, вычислитель показателя эффективности управления рисками, входом/выходом подключенный к соответствующему выходу/входу формирователя баз данных допустимых уровней рисков, входом - ко второму выходу модуля оценки остаточного риска, а выходом - к пятому входу процессора, и вычислитель показателя эффективности мероприятий по предотвращению нарушений безопасности движения, входами соединенный со вторыми выходами соответственно модулей оценки фактического риска, гипотетического риска и остаточного риска, входом/выходом - с соответствующим выходом/входом формирователя базы данных параметров мероприятий по предотвращению нарушений безопасности движения, а выходом - с шестым входом процессора.
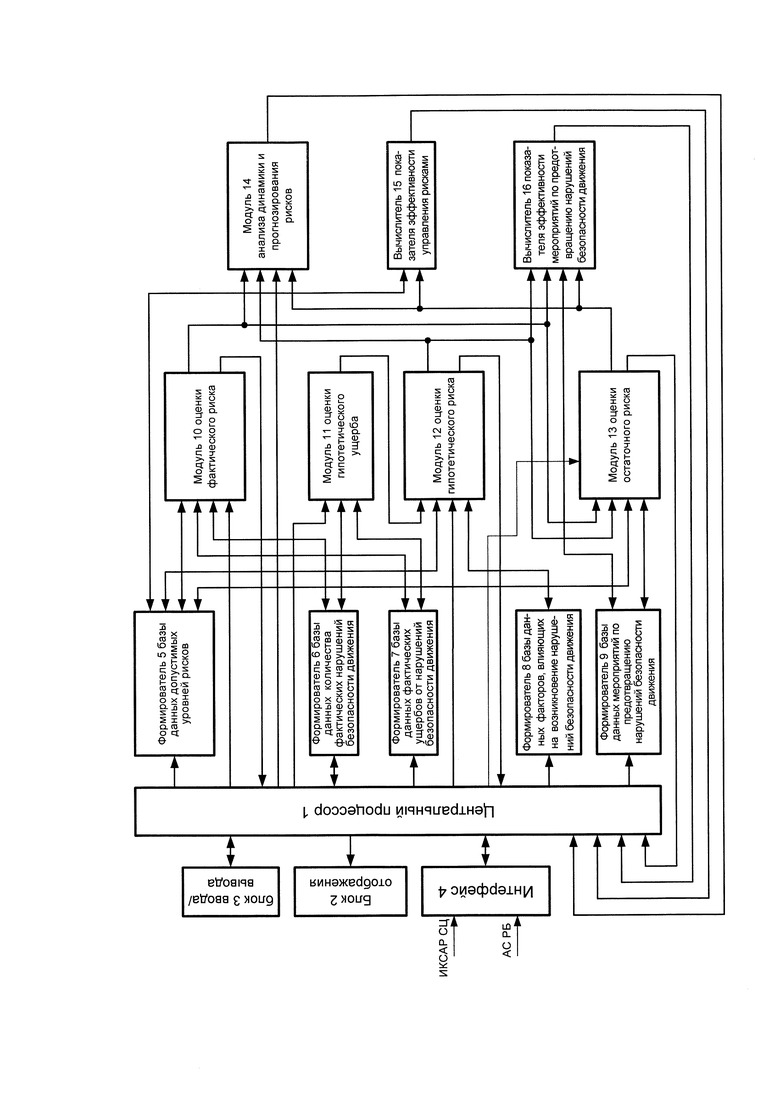
Существо изобретений поясняется чертежом, на котором представлена структурная схема системы для управления рисками в области безопасности движения поездов.
Система для управления рисками в области безопасности движения поездов содержит центральный процессор 1 с блоком 2 отображения, вход которого подключен к первому выходу процессора 1, и блоком 3 ввода/вывода, вход/выход которого подключен к первому выходу/входу процессора 1, интерфейс 4 для сопряжения процессора 1 с аппаратно-программными устройствами интеграционного комплекса систем автоматизации работы ситуационного центра (ИКСАР СЦ) и автоматизированной системы управления безопасностью движения (АС РБ), формирователи 5-9 соответственно баз данных допустимых уровней рисков, данных количества фактических нарушений безопасности движения, данных фактических ущербов от нарушений безопасности движения, данных параметров факторов, влияющих на возникновение нарушений безопасности движения, и данных параметров мероприятий по предотвращению нарушений безопасности движения, причем вход/выход формирователя 6 подключен к третьему выходу/входу процессора 1, а входы каждого из формирователей 5, 7, 8 и 9 подключены соответственно ко второму, третьему, четвертому и пятому выходам процессора 1, модуль 10 оценки фактического риска, входы/выходы которого подключены к соответствующим входам/выходам формирователей 5, 7 и 6, вход - к шестому выходу процессора 1, а первый выход - к первому входу процессора 1, модуль 11 оценки гипотетического ущерба, первый вход которого подключен к седьмому выходу процессора 1, а входы/выходы - к соответствующим выходам/входам формирователей 6 и 7, модуль 12 оценки гипотетического риска, первый вход которого соединен с выходом модуля 11, второй вход - с восьмым выходом процессора 1, входы/выходы - с соответствующими выходами/входами формирователей 5 и 8, а первый выход - со вторым входом процессора 1, модуль 13 оценки остаточного риска, входы которого подключены соответственно к девятому входу процессора 1 и ко вторым выходам модулей 10 и 12, входы/выходы - к соответствующим выходам/входам формирователей 5 и 9, а первый выход - к третьему входу процессора 1, модуль 14 анализа динамики и прогнозирования рисков, входы которого подключены соответственно ко вторым выходам модулей 10, 12 и 13 и к десятому выходу процессора 1, а выход - к четвертому входу процессора 1, вычислитель 15 показателя эффективности управления рисками, вход/выход которого подключен к соответствующему выходу/входу формирователя 5, вход - ко второму выходу модуля 13, а выход - к пятому входу процессора 1, вычислитель 16 показателя эффективности мероприятий по предотвращению нарушений безопасности движения, входами соединенный со вторыми выходами соответственно модулей 12, 10 и 13, входом/выходом - с соответствующим выходом/входом формирователя 9, а выходом - с шестым входом процессора 1.
Безопасность движения это свойство железнодорожной транспортной системы не создавать опасности жизни и здоровью людей, материальным ценностям, природе и другим техническим комплексам в результате реализации перевозочного процесса на всех его стадиях. Безопасность движения описывается двумя базовыми характеристиками: рисками и показателями безопасности, которые отражают динамику процессов и состояние системы безопасности движения.
Показатели безопасности отражают состояние системы безопасности движения за отчетные периоды времени на основе статистических данных о ее функционировании, в том числе сведений о состоянии, финансовых расходах на поддержание системы и т.п.
Риск определяется как сочетание вероятности (или частоты) возникновения события и ущерба от его возникновения. Риски зависят от текущего состояния целого ряда объектов инфраструктуры, обеспечивающих перевозочный процесс, и подвижного состава, а также размеров движения поездов. Обоснование допустимых уровней риска и показателей безопасности подразумевает под собой нахождение таких величин показателей, при которых достигается баланс между расходами на обеспечение и поддержание заданного уровня безопасности и ущербами от нарушения безопасности движения.
Система для управления рисками в области безопасности движения поездов функционирует следующим образом.
На начальном этапе причастными службами за каждый интервал времени наблюдения (за год) регистрируют события нарушения безопасности движения поездов. При этом каждое нарушение безопасности движения фиксируется в соответствии с установленным перечнем событий. На территории России перечень событий нарушений безопасности движения утвержден приказом №344 Минтранса России «Об утверждении Положения о классификации, порядке расследования и учета транспортных происшествий и иных событий, связанных с нарушением правил безопасности движения и эксплуатации железнодорожного транспорта» от 18 декабря 2014 года.
Для каждого события нарушения безопасности движения поездов причастные службы оценивают ущерб, возникший в результате его наступления. Данные о каждом событии, связанным с нарушением безопасности движения, и ущербе, возникшим в результате его наступления, причастные службы передают в автоматизированную систему управления безопасностью движения (АС РБ) (Распоряжение ОАО «РЖД» от 25 июня 2007 г. N 1158р «Об организации внедрения автоматизированной системы управления безопасностью движения (АС РБ)»), аппаратно-программное устройство которой осуществляет обработку полученных данных, анализирует каждое событие для определения его вида и факторов, обусловивших его возникновение, результаты обработки и анализа передает в аппаратно-программное устройство интеграционного комплекса системы автоматизации работы ситуационного центра (ИКСАР СЦ) (A.M. Замышляев, Прикладные информационные системы управления надежностью, безопасностью, рисками и ресурсами на железнодорожном транспорте, Ульяновск: Областная типография «Печатный двор», 2013, 99-107 с.).
Аппаратно-программное устройство в ИКСАР СЦ в автоматическом режиме осуществляет запись полученной информации в базу данных. На основе полученных данных ИКСАР СЦ для риска каждого вида р определяет значения вероятности Pjp перехода в нарушение безопасности движения проявлений каждого j-го 
Под коэффициентом снижения риска понимается отношение уровня риска вида р после выполнения k-го мероприятия к уровню риска вида р до его выполнения. Значение Dkp получают экспериментальным путем на основе влияния на уровень риска вида р k-го мероприятия, выполненного в прошлом.
ИКСАР СЦ включает базу данных установленные владельцем инфраструктуры железнодорожного транспорта для риска каждого вида в области безопасности движения значения заданного для каждого вида риска допустимый уровень (Федеральные нормы и правила в области промышленной безопасности Методика установления допустимых уровней риска на опасных производственных объектах нефтегазового комплекса (Проект). - М.: ЗАО НТЦ ПБ, 2014. - 28 с.)
Процессор 1 системы для управления рисками в области безопасности движения поездов через интерфейс 4 запрашивает в системе ИКСАР СЦ установленные владельцем инфраструктуры железнодорожного транспорта для риска каждого вида в области безопасности движения значения допустимого уровня риска и после получения направляет их в формирователь 5, который формирует базу данных, включающую массив данных допустимых уровней рисков RДр в области безопасности движения для рисков каждого вида p=1…n.
Также, процессор 1 через интерфейс 4 запрашивает в системе ИКСАР СЦ установленные владельцем инфраструктуры железнодорожного транспорта для риска каждого вида в области безопасности движения значения вероятности перехода в нарушение безопасности движения проявлений факторов каждого вида, влияющих на возникновение нарушений безопасности движения, и после получения запрашиваемых данных направляет их в формирователь 8, который формирует базу данных, включающую массив данных значений Pjp вероятности перехода проявлений фактора вида j 
Вместе с тем, процессор 1 через интерфейс 4 запрашивает в системе ИКСАР СЦ установленные владельцем инфраструктуры железнодорожного транспорта для риска каждого вида в области безопасности движения значения Dkp коэффициентов снижения риска от выполнения мероприятий каждого вида по предотвращению нарушений безопасности движения и значения затрат на выполнение мероприятий каждого вида и после получения запрашиваемых данных направляет их в формирователь 9, который формирует базу данных, включающую массив данных значений Dkp коэффициентов снижения риска вида р от выполнения мероприятий вида k=1…K по предотвращению нарушений безопасности движения (снижению риска) для рисков каждого вида и массив данных значений затрат sk, тыс. руб., на мероприятия вида k (k=1…K) по предотвращению нарушений безопасности движения (снижению риска).
Кроме того, процессор 1 через интерфейс 4 запрашивает в системе ИКСАР СЦ установленное владельцем инфраструктуры железнодорожного транспорта для прогнозирования рисков всех видов в области безопасности движения значение коэффициента w убывания значимости более ранних интервалов наблюдения (рекомендуемое значение коэффициента w равно 2; данное значение получено экспериментальным путем по результатам анализа корреляции более ранних и более поздних оценок риска) и направляет его в модуль 14 анализа динамики и прогнозирования риска.
С помощью блока 3 ввода/вывода оператор системы задает исходные данные, содержащие диапазон 1…m анализируемых интервалов времени наблюдения.
На основании исходных данных, получаемых из блока 3 ввода/вывода, процессор 1 для каждого заданного i-го (i=1…m) интервала наблюдения через интерфейс 4 запрашивает в системе АС РБ и направляет в формирователь 6 данные о фактическом количестве NФip нарушений безопасности движения по каждому их виду р=1…n, в формирователь 7 - данные о фактических ущербах UФip от нарушений безопасности движения по соответствующему виду р.
Вместе с тем, процессор 1 для каждого заданного i-го (i=1…m) интервала наблюдения через интерфейс 4 запрашивает в системе ИКСАР СЦ и направляет в формирователь 8 данные о количестве Mji проявлений факторов, влияющих на возникновение нарушений безопасности движения, по каждому их виду 
После этого процессор 1 на каждом i-м (i=1…m) интервале наблюдения анализирует статистику нарушений безопасности движения на основе данных, запрашиваемых из формирователя 6, и определяет достаточность объема выборки по количеству фактических нарушений безопасности движения каждого вида p=1…n. При этом процессор 1 формирует количество n1i, n1i≤n, видов рисков, для которых объем выборки является достаточным (рекомендуемое значение - 10 и более событий за интервал наблюдения) и количество n2i, n2i=n-n1i, видов рисков для которых объем выборки является недостаточным. Показатель n1i процессор 1 передает в модуль 10 оценки фактического риска, а показатель n2i - в модуль 11 оценки гипотетического ущерба и в модуль 12 оценки гипотетического риска.
Далее для каждого интервала наблюдения i=1…m в случае, если n1i>0, процессор 1 формирует управляющую команду, инициирующую работу модуля 10 для определения фактического уровня риска каждого вида р=1…n1i на i-м интервале наблюдения.
При этом модуль 10 запрашивает в формирователе 6 данные за каждый i-й интервал наблюдения о фактическом количестве NФip нарушений безопасности движения по каждому виду р=1…n1i с достаточным объемом выборки, а в формирователе 7 - данные о фактическом ущербе UФip от нарушений безопасности движения вида р=1…n1i, нормированном на одно событие, и определяет для риска каждого вида р=1…n1i (например, риск схода подвижного состава) фактический уровень риска RФiр как:
где Ti - длительность i-го интервала наблюдения, рекомендуемое значение которого равно календарному году.
Кроме того, модуль 10 оценивает фактический риск RФip. Для этого модуль 10 запрашивает в формирователе 5 данные о заданном допустимом уровне риска RДр для каждого его вида р=1…n1i и оценивает фактический риск путем соотношения его уровня с допустимым уровнем риска RДр.
Значение RФip/RДр модуль 10 направляет в процессор 1 для последующего анализа, а значение фактического уровня риска RФip - в модуль 13 оценки остаточного риска, в модуль 14 анализа динамики и прогнозирования риска и в вычислитель 16 эффективности мероприятий по предотвращению нарушения безопасности движения.
Далее для каждого интервала наблюдения i=1…m в случае, если n2i>0, процессор 1 формирует управляющую команду, инициирующую работу модуля 11 для оценки гипотетического ущерба каждого вида р=1…n2i на i-м интервале наблюдения.
При этом модуль 11 запрашивает у формирователя 7 данные о фактическом суммарном ущербе SФ(i-2)p, SФ(i-2)p и SФip от события нарушений безопасности движения вида p=1…n2i соответственно за i-2-й, i-1-й и i-й интервалы наблюдения, у формирователя 6 - данные о фактическом количестве NФ(i-2)p, NФ(i-1)p и NФip событий вида p=1…n2i соответственно за i-2-й, i-1-й и i-й интервалы наблюдения. Причем данные за периоды i-2 и i-1 запрашиваются модулем 11 вне зависимости от того, был ли объем выборки в данные интервалы наблюдения достаточным или нет.
Гипотетический уровень ущерба UГр модуль 11 определяет на основе данных о суммарных ущербах от события данного вида и о количестве событий за текущий (i-й) и предшествующие (i-1, i-2) интервалы наблюдения:
Значение гипотетического уровня ущерба UГр модуль 11 направляет в модуль 12 оценки гипотетического риска, что инициирует работу модуля 12.
Модуль 12 для определения гипотетического риска RГip вида p=1…n2i за интервал наблюдения i=1…m запрашивает в формирователе 8 данные о количестве Mji проявлений j-го 
где Ti - длительность i-го интервала наблюдения, рекомендуемое значение которой равно календарному году.
Кроме того, модуль 12 оценивает гипотетический риск RГip. Для этого модуль 12 запрашивает в формирователе 5 данные о заданном допустимом уровне риска RДр для каждого его вида р=1…n2i и оценивает гипотетический риск RГip путем соотношения его уровня с допустимым уровнем риска RДр.
Значение RГip/RДр модуль 12 направляет в процессор 1 для анализа, а значение гипотетического уровня риска RГip - в модуль 13 оценки остаточного риска, в модуль 14 анализа динамики и прогнозирования риска и в вычислитель 16 эффективности мероприятий по предотвращению нарушения безопасности движения.
Модуль 13 осуществляет определение остаточного риска ROip каждого вида р=1…n на заданном i-м (i=1…m) интервале наблюдения.
Если уровень фактического RФip или гипотетического RГip риска вида р превышает допустимый уровень RДр, то процессор 1 направляет соответствующий управляющий сигнал модулю 13, который запрашивает в формирователе 9 для риска каждого вида данные о коэффициенте снижения Dkp риска вида р от выполнения мероприятия k=1…Kip по предотвращению нарушений безопасности движения по всем мероприятиям, запланированных на i-м интервале наблюдения для снижения риска данного вида. При этом если для риска данного вида оценивался фактический риск RФip, то
а если оценивался гипотетический риск RГip, то
где Kip - количество видов мероприятий по предотвращению нарушений безопасности движения, запланированных на i-м интервале наблюдения для снижения риска вида р.
Если уровень фактического RФip или гипотетического RГip риска вида р не превышает допустимый уровень RДр, то процессор 1 формирует управляющий сигнал, в соответствии с которым модуль 13 уровень остаточного риска ROip вида р принимает равным соответственно уровню фактического риска RФip этого вида или гипотетическому риску RГip.
Кроме того, модуль 13 оценивает остаточный риск ROip. Для этого модуль 13 запрашивает в формирователе 5 данные о заданном допустимом уровне риска RДр для каждого его вида р=1…n и оценивает остаточный риск ROip путем соотношения его уровня с допустимым уровнем риска RДр.
Значение ROip/RДр модуль 13 направляет в процессор 1 для анализа, а значение уровня остаточного риска ROip - в модуль 14 анализа динамики и прогнозирования риска, в вычислитель 15 показателя эффективности управления рисками и в вычислитель 16 показателя эффективности мероприятий по предотвращению нарушения безопасности движения.
При этом результаты оценок рисков каждого вида р процессор 1 представляет в виде матриц рисков (см. ГОСТ Р 54505-2011, Безопасность функциональная. Управление рисками на железнодорожном транспорте. М.: Стандартинформ, 2012 г.).
Если риск имеет категорию «не принимаемый в расчет», то никакие действия по управлению риском не требуются. Если риск имеет категорию «допустимый», то действия по управлению риском, не требуются, но продолжается наблюдение за уровнем риска. Если риск имеет категорию «нежелательный», то на основе значимости данного вида риска (например, по степени угрозы жизни и здоровью людей, влияния на экологию и т.п.) принимается решение о необходимости снижения риска, либо о принятии риска. Если риск имеет категорию «недопустимый», то однозначно требуется его снижение.
В случае принятия решения о снижении риска процессор 1 формирует проект перечня мероприятий по предотвращению этого вида события нарушения безопасности движения.
По результатам определения уровней рисков RФip, RГip,, ROip для каждого вида р, которые получены для нескольких (рекомендуется 4 и более) интервалов наблюдения 1…m, модуль 14 анализа динамики и прогнозирования риска выполняет анализ динамики риска (по риску каждого вида) и прогнозирование его значения на последующий интервал наблюдения m+1.
При этом модуль 14 выбирает доступное количество m интервалов наблюдения, условный номер i которых возрастает от 1 до m, от более ранних по времени интервалов наблюдения к более поздним и использует полученные от модулей 10, 12 и 13 соответствующие значения уровней рисков.
Для прогнозирования значения риска на последующий интервал наблюдения применяется метод линейной регрессии с введением весовых коэффициентов q1…qm, учитывающих убывание значимости более ранних (по времени) оценок риска. Для этого модуль 14 использует полученное от процессора 1 значение коэффициента w убывания значимости более ранних интервалов наблюдения.
Модуль 14 вычисляет весовые коэффициенты q1…qm по формулам:
qi-1=qi/w.
Коэффициент b уравнения линейной регрессии, используемый для прогнозирования оценки риска на следующем (m+1)-м интервале наблюдения, модуль 14 вычисляет по формуле:
где ri - оценка риска заданного вида на интервале наблюдения i (ri=RФip, RГip или ROip).
Коэффициент а уравнения линейной регрессии, используемый для прогнозирования оценки риска на следующем (m+1)-м интервале наблюдения, модуль 14 вычисляет по формуле:
a=rm-b×m,
где rm - оценка риска заданного вида на последнем доступном интервале наблюдения m.
Прогнозируемое значение риска rm+1 на последующем (m+1)-м интервале наблюдения модуль 14 определяет выражением:
rm+1=a+b×(m+1).
Результаты анализа динамики и прогнозирования рисков модуль 14 направляет в процессор 1.
Кроме того, для рисков всех видов на каждом i-м интервале наблюдения предлагаемая система рассчитывает показатель Ei эффективности управления рисками и показатель Эi эффективности мероприятий по предотвращению нарушений безопасности движения.
Показатель Ei эффективности управления рисками (по рискам всех видов) на заданном i-м (i=1…m) интервале наблюдения рассчитывает вычислитель 15. Для этого вычислитель 15 запрашивает в формирователе 5 данные о допустимом уровне RДр риска вида р=1…n и с учетом значений ROip остаточного риска вида р за i-й интервал наблюдения рассчитывает показатель Еi как в случае определения фактического уровня риска, так и в случае определения гипотетического уровня риска, по выражению:
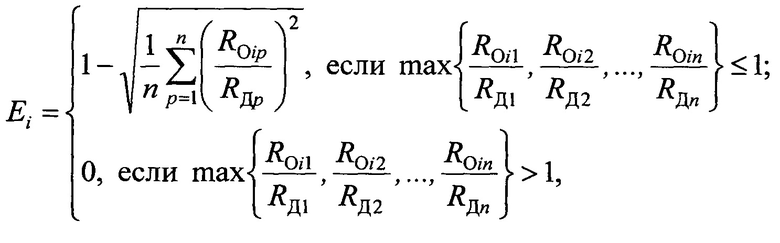
где n - количество видов нарушений безопасности движения и соответствующих им рисков в области безопасности движения.
Показатель Эi эффективности мероприятий по предотвращению нарушений безопасности движения (по рискам всех видов) на заданном i-м (i=1…m) интервале наблюдения рассчитывает вычислитель 16. Для этого вычислитель 16 запрашивает в формирователе 9 для каждого интервала наблюдения i=1…m и каждого вида риска p=1…n затраты sk, тыс. руб., на запланированные на i-м интервале наблюдения мероприятия видов k=1…Kip по снижению риска вида р и с учетом значений фактического RФip (для видов р=1…n1i), гипотетического RГip (для видов p=1…n2i) и остаточного Roip (для видов p=1…n) уровней риска, полученных соответственно от модулей 10, 12 и 13, рассчитывает показатель Эi по формуле:
С выходов вычислителей 15 и 16 результаты оценки Ei и Эi поступают в процессор 1.
Программное обеспечение процессора 1 обрабатывает полученные данные с возможностью представления оценок рисков и показателей эффективности в виде матриц рисков, диаграмм и графиков, отображаемых на блоке 2 отображения, а также с возможностью их представления в виде электронных или бумажных отчетных форм. При этом процессор 1 осуществляет ранжирование рисков в порядке их значимости (по убыванию уровня риска).
Таким образом, реализуется способ управления рисками в области безопасности движения поездов, позволяющий повысить эффективность управления рисками за счет возможности оценки риска на основе факторов риска, а также оценки эффективности запланированных мер (мероприятий) и эффективности управления рисками в целом, что позволяет повысить эффективность мероприятий, направленных на предотвращение нарушений безопасности движения поездов на основе приоритетности получаемых оценок рисков и показателей эффективности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения пожарной опасности технических объектов железнодорожного транспорта и система для его реализации | 2017 |
|
RU2674216C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ КОМПЛЕКСНОГО УПРАВЛЕНИЯ РЕСУРСАМИ, РИСКАМИ, НАДЕЖНОСТЬЮ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2015 |
|
RU2579981C1 |
| ЛАЗЕРНЫЙ ТОЛЩИНОМЕР И СПОСОБ ЕГО КАЛИБРОВКИ | 2013 |
|
RU2542633C1 |
| СПОСОБ ПОВЫШЕНИЯ НАДЕЖНОСТИ СИСТЕМ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ С ОЦЕНКОЙ ЕГО ЭФФЕКТИВНОСТИ | 2019 |
|
RU2725354C1 |
| Способ измерения отношения сигнал/шум | 1987 |
|
SU1474564A1 |
| СИГНАЛИЗАТОР ПРЕДЕЛЬНЫХ ЗНАЧЕНИЙ УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2012891C1 |
| ИНТЕГРАЦИОННЫЙ ИНФОРМАЦИОННЫЙ КОМПЛЕКС РУКОВОДИТЕЛЯ | 2013 |
|
RU2557649C2 |
| Система и способ для контроля технического состояния производственных объектов | 2023 |
|
RU2833832C1 |
| Способ анализа качества электрической энергии в трехфазной системе промышленного электроснабжения | 2021 |
|
RU2769082C1 |
| Способ управления качеством перевозочного процесса на железнодорожном транспорте | 2016 |
|
RU2622523C1 |
Изобретение относится к автоматизированным средствам поддержки принятия решений и может быть применено в системе управления рисками в области безопасности движения поездов. Технический результат заключается в обеспечении возможности оценки риска на основе факторов риска и управлении рисками на основе результатов полученной оценки. Система для управления рисками содержит процессор, формирователи параметров факторов, влияющих на возникновение нарушений безопасности движения, и параметров мероприятий по предотвращению нарушений безопасности движения, модули оценки фактического риска, гипотетического ущерба и гипотетического риска, модуль анализа динамики и прогнозирования рисков, вычислитель показателя эффективности управления рисками и вычислитель показателя эффективности мероприятий по предотвращению нарушений безопасности движения. 1 ил.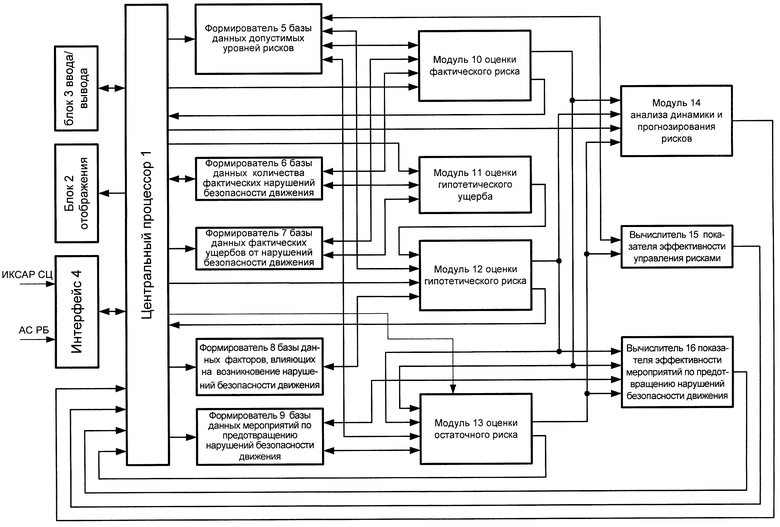
Система для управления рисками в области безопасности движения поездов, содержащая центральный процессор, блок отображения, вход которого подключен к первому выходу процессора, блок ввода/вывода, вход/выход которого подключен к первому выходу/входу процессора, вторым входом/выходом соединенного с входом/выходом интерфейса для сопряжения с аппаратно-программными устройствами интеграционного комплекса систем автоматизации работы ситуационного центра и автоматизированной системы управления безопасностью движения, формирователи баз данных соответственно допустимых уровней рисков, количества фактических нарушений безопасности движения, фактических ущербов от нарушений безопасности движения, параметров факторов, влияющих на возникновение нарушений безопасности движения, и параметров мероприятий по предотвращению нарушений безопасности движения, причем вход/выход формирователя баз данных количества фактических нарушений безопасности движения подключен к третьему выходу/входу процессора, а входы формирователей баз данных допустимых уровней рисков, фактических ущербов от нарушений безопасности движения, параметров факторов, влияющих на возникновение нарушений безопасности движения, и параметров мероприятий по предотвращению нарушений безопасности движения подключены соответственно ко второму, третьему, четвертому и пятому выходам процессора, модуль оценки фактического риска, входы/выходы которого подключены к соответствующим входам/выходам формирователей баз данных допустимых уровней рисков, количества фактических нарушений безопасности движения и фактических ущербов от нарушений безопасности движения, вход - к шестому выходу процессора, а первый выход - к первому входу процессора, модуль оценки гипотетического ущерба, первым входом соединенный с седьмым выходом процессора, а входами/выходами - с соответствующими выходами/входами формирователей баз данных количества фактических нарушений безопасности движения и фактических ущербов от нарушений безопасности движения, модуль оценки гипотетического риска, первый вход которого соединен с выходом модуля оценки гипотетического ущерба, второй вход - с восьмым выходом процессора, входы/выходы - с соответствующими выходами/входами формирователей баз данных допустимых уровней рисков и параметров факторов, влияющих на возникновение нарушений безопасности движения, а первый выход - со вторым входом процессора, модуль оценки остаточного риска, входами подключенный к девятому выходу процессора и ко вторым выходам соответственно модулей оценки фактического риска и гипотетического риска, входами/выходами - к соответствующим выходам/входам формирователей баз данных допустимых уровней рисков и параметров мероприятий по предотвращению нарушений безопасности движения, а первым выходом - к третьему входу процессора, модуль анализа динамики и прогнозирования рисков, входы которого соединены со вторыми выходам соответственно модулей оценки фактического риска, гипотетического риска, остаточного риска и с десятым выходом процессора, а выход - с четвертым входом процессора, вычислитель показателя эффективности управления рисками, входом/выходом подключенный к соответствующему выходу/входу формирователя баз данных допустимых уровней рисков, входом - ко второму выходу модуля оценки остаточного риска, а выходом - к пятому входу процессора, и вычислитель показателя эффективности мероприятий по предотвращению нарушений безопасности движения, входами соединенный со вторыми выходами соответственно модулей оценки фактического риска, гипотетического риска и остаточного риска, входом/выходом - с соответствующим выходом/входом формирователя базы данных параметров мероприятий по предотвращению нарушений безопасности движения, а выходом - с шестым входом процессора.
| СПОСОБ УПРАВЛЕНИЯ МНОГОУРОВНЕВОЙ СИСТЕМОЙ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ НА ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2397902C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2011 |
|
RU2467905C1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| US 5867404 A1, 02.02.1999 | |||
| EP 1600351 B1, 10.01.2007. | |||

