ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системам преобразования электроэнергии, системам управления двигателями и распределения.
УРОВЕНЬ ТЕХНИКИ
Двигатели используются для решения самых разнообразных задач. При решении многих задач двигатель соединен с устройством управления двигателем, которое выполняет конкретную функцию по управлению операциями этого двигателя. Например, двигатели в воздушном летательном аппарате используют для приведения в действие поверхностей управления, систем управления условиями окружающей среды и многих других систем. Каждый из этих двигателей обычно принимает электрическую энергию от специального устройства управления двигателем, подключенного между двигателем и источником питания. Устройство управления двигателем может содержать любую комбинацию из выпрямителей, инверторов и фильтров, которые приводят электрический сигнал, принимаемый от источника питания для использования двигателем, в определенное состояние.
В воздушном летательном аппарате и других транспортных платформах обычно реализовано одно специальное устройство управления двигателем, установленное в транспортном средстве для каждого двигателя. Каждое устройство управления двигателем имеет размер, соответствующий требованию по пиковой нагрузке на единицу мощности двигателя, который обслуживается устройством управления двигателем. Например, двигатель с мощностью в 100 киловатт (кВт) требовал бы наличия устройства управления двигателем с мощностью в 100 кВт, представляющее собой устройство управления двигателем, которое выполнено с возможностью определения условий и выдачи мощности в 100 кВт на двигатель.
Устройства управления двигателем могут представлять собой относительно тяжелое оборудование. Различные компоненты устройств управления двигателем, такие как входные и выходные фильтры, значительно увеличивают общий вес каждого управляющего устройства. Поскольку вес устройств управления двигателем по существу пропорционален номинальной мощности устройства управления, то чем выше номинальная мощность устройства управления двигателем, тем тяжелее будет устройство управления двигателем.
Эти сведения приведены в отношении этих соображений, а также других соображений, которые реализованы в настоящей заявке для настоящего изобретения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В одном варианте реализации способ управления мощностью в реальном времени в отношении множества устройств управления двигателем посредством по меньшей мере одного обрабатывающего устройства на компьютерной системе может включать определение первой потребности в силовой нагрузке из первого множества активных двигателей, которое представляет собой подсовокупность множества двигателей, осуществление выбора первой комбинации устройств управления двигателем из множества устройств управления двигателем, необходимой для обеспечения мощности, достаточной для соответствия первой потребности в силовой нагрузке по меньшей мере частично на основании максимальной выходной мощности указанного множества устройств управления двигателем, назначение первой совокупности общесистемных приоритетов по меньшей мере частично на основании максимальной выходной мощности и первой потребности в силовой нагрузке, осуществление настройки схемы переключения питания таким образом, что указанное первое множество активных двигателей электрически соединены с первым количеством устройств управления двигателем согласно указанной первой совокупности общесистемных приоритетов, прием запроса мощности для первого двигателя от первого блока управления, причем запрос мощности связан с первым уровнем приоритета, определение назначения первого приоритета для первого уровня приоритета в отношении указанной первой совокупности общесистемных приоритетов, назначение второй совокупности общесистемных приоритетов на основании по меньшей мере частично назначения первого приоритета и указанной первой совокупности общесистемных приоритетов, определение второй потребности в силовой нагрузке из второго множества активных двигателей, которое содержит указанное первое множество активных двигателей и первый двигатель, осуществление выбора второй комбинации устройств управления двигателем из указанного множества устройств управления двигателем, необходимой для обеспечения мощности, достаточной для соответствия второй потребности в силовой нагрузке, и осуществление настройки схемы переключения питания таким образом, что указанное второе множество активных двигателей электрически соединены со второй комбинацией устройств управления двигателем согласно указанной второй совокупности общесистемных приоритетов. В другом варианте реализации система управления двигателем может содержать множество двигателей, множество устройств управления двигателем, выполненных с возможность параллельного электрического соединения, схему переключения питания, электрически соединяющую указанное множество двигателей с указанным множеством устройств управления двигателем, и параллельный модульный преобразователь для динамического управления схемой переключения питания, содержащий компьютер по меньшей мере с одним обрабатывающим устройством и носителем данных для долговременного хранения данных, имеющим выполняемые компьютером инструкции, которые хранятся на этом компьютере и которые, при их выполнении на компьютере, вызывают то, что указанный компьютер определяет первую потребность в силовой нагрузке из первого множества активных двигателей, которое представляет собой подсовокупность множества двигателей, выбирает первую комбинацию устройств управления двигателем из указанного множества устройств управления двигателем, необходимую для обеспечения мощности, достаточной для согласования с первой потребностью в силовой нагрузке, по меньшей мере частично на основании максимальной выходной мощности указанного множества устройств управления двигателем, назначает первую совокупность общесистемных приоритетов по меньшей мере частично на основании максимальной выходной мощности и первой потребности в силовой нагрузке, настраивает схему переключения питания таким образом, что указанное первое множество активных двигателей электрически соединены с первым количеством устройств управления двигателем согласно первой совокупности общесистемных приоритетов, принимает запрос мощности для первого двигателя от первого блока управления, связанный с первым уровнем приоритета, определяет назначение первого приоритета для первого уровня приоритета в отношении указанной первой совокупности общесистемных приоритетов, назначает вторую совокупность общесистемных приоритетов по меньшей мере частично на основании назначения первого приоритета и указанной первой совокупности общесистемных приоритетов, определяет вторую потребность в силовой нагрузке из второго множества активных двигателей, которое содержит указанное первое множество активных двигателей и первый двигатель, выбирает вторую комбинацию устройств управления двигателем из указанного множества устройств управления двигателем, необходимую для обеспечения мощности, достаточной для согласования со второй потребностью в силовой нагрузке, и настраивает схему переключения питания таким образом, что указанное второе множество активных двигателей электрически соединены со второй комбинацией устройств управления двигателем согласно указанной второй совокупности общесистемных приоритетов.
Еще в одном варианте реализации воздушный летательный аппарат с системой управления двигателем, может содержать множество двигателей, множество устройств управления двигателем, выполненных с возможностью параллельного электрического соединения, схему переключения питания, электрически соединяющую указанное множество двигателей с указанным множеством устройств управления двигателем, и параллельный модульный преобразователь для динамического управления схемой переключения питания, содержащий компьютер по меньшей мере с одним обрабатывающим устройством и носителем данных для долговременного хранения данных, имеющим выполняемые компьютером инструкции, которые хранятся на этом компьютере и которые, при их выполнении на компьютере, вызывают то, что указанный компьютер принимает сообщение, содержащее запрашиваемый режим и количество энергии для запрашиваемого режима, рассчитывает максимальную нагрузочную способность по мощности по меньшей мере частично на основании общего количества устройств управления двигателем и значения мощности, связанного с каждым устройством управления двигателем, рассчитывает текущее потребление мощности по меньшей мере частично на основании того, какие режимы являются активными в текущий момент времени, и того, какая мощность потребляется в результате этих активных режимов, определяет текущую нагрузочную способность по мощности, которая в текущий момент времени доступна для использования, путем вычисления разности между максимальной нагрузочной способностью по мощности и текущим отреблением мощности, активирует запрашиваемый режим и уменьшает текущую нагрузочную способность по мощности для учета активности запрашиваемого режима, только если текущая нагрузочная способность по мощности не меньше количества энергии для запрашиваемого режима, однако если текущая нагрузочная способность по мощности меньше количества энергии для запрашиваемого режима, то затем определяет назначение приоритета для запрашиваемого режима по отношению ко всем другим активным режимам, активирует запрашиваемый режим только при текущей нагрузочной способности по мощности и затем уменьшает текущую нагрузочную способность по мощности для учета активности запрашиваемого режима, только если приоритет запрашиваемого режима ниже приоритета всех других активных режимов или равен ему, однако если приоритет запрашиваемого режима не меньше приоритета всех других активных в текущий момент времени режимов или равен ему, то затем определяет, существуют ли какие-либо низкоприоритетные режимы, имеющие назначение приоритета, которое ниже только назначения приоритета запрашиваемого режима, и, если существуют какие-либо низкоприоритетные режимы, то затем определяет, представляют ли собой только низкоприоритетные режимы, которые существуют, режимы с первым наименьшим приоритетом, имеющие назначение приоритета, которое только на один уровень ниже назначения приоритета запрашиваемого режима, а если существуют какие-либо режимы с первым наименьшим приоритетом, то затем определяет общую энергию режимов с первым наименьшим приоритетом, которая используется в текущий момент времени этими режимами с первым наименьшим приоритетом, то затем частично уменьшает общую энергию режимов с первым наименьшим приоритетом, направляет эту частично уменьшенную энергию на запрашиваемый режим, и устанавливает текущую нагрузочную способность по мощности в ноль, только если возможно осуществить частичное уменьшение общей энергии режимов с первым наименьшим приоритетом, если невозможно осуществить частичное уменьшение общей энергии режимов с первым наименьшим приоритетом, то затем полностью уменьшает общую энергию режимов с первым наименьшим приоритетом, направляет эту полностью уменьшенную энергию на запрашиваемый режим, и устанавливает текущую нагрузочную способность по мощности в ноль, определяет, существуют ли режимы со вторым наименьшим приоритетом, имеющие назначение приоритета между уровнем назначения режимов с первым наименьшим приоритетом и уровнем назначения приоритета запрашиваемого режима, а существуют если какие-либо режимы со вторым наименьшим приоритетом, то затем частично уменьшает общую энергию режимов с первым наименьшим приоритетом, направляет эту частично уменьшенную энергию на запрашиваемый режим, только если возможно осуществить частичное уменьшение общей энергии режимов с первым наименьшим приоритетом, а если не возможно осуществить частичное уменьшение общей энергии режимов с первым наименьшим приоритетом, то затем полностью уменьшает общую энергию режимов с первым наименьшим приоритетом, определяет общую энергию режимов со вторым наименьшим приоритетом, которая используется в текущий момент времени этими режимами со вторым наименьшим приоритетом, частично уменьшает общую энергию режимов со вторым наименьшим приоритетом, направляет эту частично уменьшенную энергию на запрашиваемый режим, только если возможно осуществить частичное уменьшение общей энергии режимов со вторым наименьшим приоритетом, а если невозможно осуществить частичное уменьшение общей энергии режимов со вторым наименьшим приоритетом, то затем полностью уменьшает общую энергию режимов с первым наименьшим приоритетом и общую энергию режимов со вторым наименьшим приоритетом, направляет эту объединенную уменьшенную энергию на запрашиваемый режим, и устанавливает текущую нагрузочную способность по мощности в ноль.
Признаки, функции и преимущества, которые были описаны, могут быть реализованы независимо в различных вариантах реализации настоящего изобретения или могут быть объединены еще в одних вариантах реализации, дополнительные сведения о которых можно увидеть по ссылке на приведенный далее раздел «Осуществление изобретения», прилагаемые чертежи и прилагаемую формулу изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1 показана структурная схема, иллюстрирующая обычную архитектуру устройств управления двигателем.
На фиг. 2 показана структурная схема, иллюстрирующая архитектуру параллельных устройств управления двигателем согласно различным вариантам реализации, представленным в настоящей заявке.
На фиг. 3 показана схема распределения силовой нагрузки, отображающая график требования к силовой нагрузке кабинного воздушного компрессора по сравнению с гидравлическим насосом двигателя во время различных фаз полета воздушного летательного аппарата согласно различным вариантам реализации, представленным в настоящей заявке.
На фиг. 4А-4Е показаны структурные схемы, отображающие примеры устройства управления двигателем, переключающего архитектуры, согласно различным вариантам реализации, представленным в настоящей заявке.
На фиг. 5А-5С показаны структурные схемы, отображающие реализации, использующие альтернативные места размещения выходного фильтра в системе устройств управления двигателем согласно различном вариантам реализации, представленным в настоящей заявке.
На фиг. 6 показана блок-схема, иллюстрирующая способ уровня техники для управления группой двигателей.
На фиг. 7 показана блок-схема, иллюстрирующая предпочтительный вариант реализации, конкретизирующий управление и работу способа уровня техники для управления группой двигателей.
На фиг. 8 показана блок-схема, иллюстрирующая предпочтительный вариант реализации, конкретизирующий управление и работу способа уровня техники для управления группой двигателей и направленный, в частности, на новую логическую схему управления электрическим запуском основного двигателя.
На фиг. 9 показана блок-схема, иллюстрирующая предпочтительный вариант реализации, конкретизирующий управление и работу способа уровня техники для управления группой двигателей и направленный, в частности, на новую логическую схему управления электрическим запуском двигателя со вспомогательным источником питания.
На фиг. 10 показана блок-схема, иллюстрирующая предпочтительный вариант реализации, конкретизирующий управление и работу способа уровня техники для управления группой двигателей и направленный, в частности, на новую логическую схему управления электрическим запуском двигателя с батарейным вспомогательным блоком питания.
На фиг. 11 показана блок-схема, иллюстрирующая предпочтительный вариант реализации, конкретизирующий управление и работу способа уровня техники для управления группой двигателей и направленный, в частности, на новую логическую схему управления электрическим рулением.
На фиг. 12 показана блок-схема, иллюстрирующая предпочтительный вариант реализации, конкретизирующий управление и работу способа уровня техники для управления группой двигателей и направленный, в частности, на новую логическую схему управления кабинным воздушным компрессором.
На фиг. 13 показана блок-схема, иллюстрирующая предпочтительный вариант реализации, конкретизирующий управление и работу способа уровня техники для управления группой двигателей и направленный, в частности, на новую логическую схему управления гидравлическим насосом.
На фиг. 14 показана блок-схема, иллюстрирующая предпочтительный вариант реализации, конкретизирующий управление и работу способа уровня техники для управления группой двигателей и направленный, в частности, на новую логическую схему управления системой создания азота.
На фиг. 15 показана блок-схема, иллюстрирующая предпочтительный вариант реализации, конкретизирующий управление и работу способа уровня техники для управления группой двигателей и направленный, в частности, на новую логическую схему для управления вентилятором системы управления условиями окружающей среды.
На фиг. 16 показана блок-схема, иллюстрирующая предпочтительный вариант реализации, конкретизирующий управление и работу способа уровня техники для управления группой двигателей и направленный, в частности, на новую логическую схему для управления системой охлаждения груза.
На фиг. 17 показана блок-схема, иллюстрирующая предпочтительный вариант реализации, конкретизирующий управление и работу способа уровня техники для управления группой двигателей и направленный, в частности, на новую логическую схему для управления снижением нагрузки и реконфигурацией.
На фиг. 18 показана схема компьютерной архитектуры, отображающая аппаратные средства компьютера и архитектуру программного обеспечения для вычислительной системы, выполненной с возможностью реализации аспектов представленных в настоящей заявке вариантов реализации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Двигатели обычно содержат устройство управления двигателем для настройки и выдачи энергии на двигатель. В системе, которая содержит группу двигателей, обычно существует одинаковое количество двигателей и устройств для их управления. Устройства управления двигателем очень часто имеют номинальные параметры для обеспечения пиковой силовой нагрузки, которая равна пиковой нагрузке соответствующего двигателя или большее нее.
При использовании идей и технологий, описанных в настоящей заявке, система двигателей содержит определенное количество устройств управления двигателем, соединенных параллельно со схемой переключения питания. Путем использования данной нижеописанной архитектуры, определенное количество устройств управления двигателем и/или номинальная мощность или допустимая выходная мощность каждого устройства управления двигателем может быть уменьшена с тем, чтобы уменьшить общий вес системы двигателей. Во всей данной заявке варианты реализации описаны в отношении двигателей и устройств управления двигателем, используемых в воздушном летательном аппарате. Окружающая среда воздушного летательного аппарата обеспечивает полезный пример для вариантов реализации, описанных в настоящей заявке, поскольку уменьшение веса воздушного летательного аппарата представляет собой универсальную задачу. Однако следует понимать, что идеи, представленные в настоящей заявке, в равной степени применимы к системам двигателей в любой платформе, включая корабли, транспортные средства или любую другую платформу, в которой рассматривается уменьшение размера и/или веса.
В приведенном далее разделе «Осуществление изобретения» приведены ссылки на прилагаемые чертежи, которые составляют его часть и которые показаны посредством изображения, конкретных вариантов реализации или примеров. Согласно чертежам, на которых аналогичные ссылочные номера представляют аналогичные элементы на всех различных фигурах, будет описана архитектура параллельных устройств управления двигателем. На фиг. 1 показана обычная архитектура 100 устройств управления двигателем для подачи энергии на двигатели 108. Согласно обычной архитектуре 100, источник 102 питания выдает энергию на шину 104, которая направляет энергию на любое количество обычных устройств 106 управления двигателем.
Следует принимать во внимание, что, для обеспечения ясности показаны только два обычных устройства 106А и 106В управления двигателем и соответствующие двигатели 108А и 108В. Каждое обычное устройство 106 управления двигателем обуславливает принятый сигнал мощности для использования обычным присоединенным двигателем 108. В данном показанном примере обычное устройство 106А управления двигателем выдает энергию на двигатель 108А, а обычное устройство 106В управления двигателем выдает энергию на двигатель 108В.
Для иллюстративных целей обычная архитектура 100 может быть реализована в воздушном летательном аппарате. Согласно данной реализации, источник 102 питания выдает сигнал переменного тока (АС) или сигнал постоянного тока (DC) на обычные устройства 106 управления двигателем. Иллюстративные обычные устройства 106А и 106В управления двигателем содержат, но без ограничения, устройство управления двигателем для кабинного воздушного компрессора, устройство управления двигателем для гидравлического насоса с электродвигателем, устройство управления пусковым двигателем для двигателя генератора, устройство управления двигателем для компрессора системы создания азота, устройство управления двигателем для вентилятора и устройство управления двигателем для исполнительного механизма системы управления полетами. Следует принимать во внимание, что любой тип устройств 106 управления двигателем и двигателей 108 может быть использован в любом типе транспортного средства или другой платформе без выхода за рамки объема настоящего изобретения.
Со ссылкой на фиг. 2 далее будет описана архитектура 200 параллельных устройств управления двигателем будет описана в соответствии с различными вариантами реализации. Аналогично иллюстративной обычной архитектуре 100, показанной на фиг. 1, архитектура 200 параллельных устройств управления двигателем содержит источник 102 питания, шину 104 и двигатели 108. Однако, в архитектуре 200 параллельных устройств управления двигателем реализовано много параллельных устройств 204 управления двигателем, которые соединены параллельно со схемой 202 переключения питания. Схема 202 переключения питания обеспечивает энергию от параллельных устройств 204 управления двигателем на двигатели 108. Схема 202 переключения питания содержит электрическую схему, которая электрически соединяет параллельные устройства 204 управления двигателем с двигателями 108 посредством ряда электрических переключателей, которые обеспечивают возможность соединения параллельных устройств 204 управления двигателем с любым заданным двигателем 108. Схема 202 переключения питания может содержать вычислительное устройство или может быть соединена с таким вычислительным устройством, которое управляет электронными переключателями для соединения параллельных устройств 204 управления двигателем, что необходимо для выдачи достаточной энергии на двигатели 108 в соответствии с настоящими требованиями к силовой нагрузке этих двигателей 108 по мере их изменения в любой заданный момент времени. Операции схемы 202 переключения питания будут описаны далее более подробно.
В примере, показанном на фиг. 2, каждое из трех параллельных устройств 204 управления двигателем имеет допустимую выходную мощность, которая меньше допустимой выходной мощности обычных устройств 106 управления двигателем, показанных на фиг. 1. Например, каждое из параллельных устройств 204А, 204В и 204С управления двигателем может быть выполнено с возможностью обеспечения мощности в 50 кВт, так что общая допустимая выходная мощность устройств управления двигателем 204 составляет 150 кВт. В отличие от этой архитектуры, обычная архитектура 100 по фиг. 1 использует два обычных устройства 106А и 106В управления двигателем, каждое из которых имеет допустимую выходную мощность, составляющую 100 кВт, при общей допустимой выходной мощности, составляющей 200 кВт. Поскольку вес устройств управления двигателем обычно пропорционален допустимой выходной мощности, архитектура 200 параллельных устройств управления двигателем, показанных на фиг. 2, может иметь меньший вес по сравнению с обычной архитектурой 100, показанной на фиг. 1, даже если три параллельных устройства 204 управления двигателем используются в архитектуре 200 параллельных устройств управления двигателем в отличие от обычных параллельных устройств 106 управления двигателем, используемых в обычной архитектуре 100.
Идеи и технологии, описанные в настоящей заявке, используют преимущество рабочих характеристик двигателей 108 в транспортном средстве и других реализациях, в которых не возникают одновременно пиковые силовые нагрузки или требования к максимальной мощности двигателей 108. В этих реализациях, имеющих дополнительные силовые нагрузки по отношению к двигателям, много меньших параллельных устройств 204 управления двигателем могут быть использованы вместо специализированных, больших обычных устройств 106 управления двигателем и могут быть динамически перенастроены, как описано в настоящей заявке, для переключения подачи энергии между двигателями 108 так, как это диктуют потребности в энергии двигателей 108.
Следует принимать во внимание, что пример, показанный на фиг. 2, упрощен в целях ясности. Несмотря на то, что только три параллельных устройства 204А, 204В и 204С управления двигателем показаны соединенными с двумя двигателями 108А и 108В, любое количество параллельных устройств 204 управления двигателем может быть использовано для выдачи энергии на любое количество двигателей 108 в соответствии с различными вариантами реализации. Аналогичным образом показана схема 202 переключения питания, содержащая одиночный, простой электронный переключатель для целей ясности. Однако, любое количество и любой тип механизмов переключения могут быть использованы в схеме 202 переключения питания для объединения выходной мощности параллельных устройств 204 управления двигателем для подачи на двигатели 108.
Со ссылкой на фиг. 3 далее будет описана иллюстративная схема 302 распределения силовой нагрузки. Схема 302 распределения силовой нагрузки показывает то, как варианты реализации, описанные в настоящей заявке, используют преимущество дополнительных требований 304 к силовой нагрузке двух различных двигателей на воздушном летательном аппарате во время различных фаз полета для использования параллельных устройств 204 управления двигателем в выдаче энергии на двигатели 108. В данном примере, на верхнем графике показано требование 304 к силовой нагрузке кабинного воздушного компрессора во время восьмой фазы 306 полета, включая наземные операции, запуск двигателя, руление, взлет, набор высоты, крейсерский полет, снижение и приземление. Вертикальная ось отражает настоящее требование 304 к силовой нагрузке кабинного воздушного компрессора.
На нижнем графике показано настоящее требование 304 к силовой нагрузке гидравлического насоса электродвигателя в течение той же самой восьмой фазы 306 полета. Следуя этим двум графикам слева направо через различные фазы полета 306 можно заметить, что доступная мощность, которая представляет собой допустимую выходную мощность всех параллельных устройств 204 управления двигателем вместе для подачи энергии на каждый из двух двигателей 108, остается на уровне в 150 кВт. Данная доступная мощность могла бы быть обеспечена с использованием архитектуры 200 параллельных устройств управления двигателем, показанной на фиг. 2, причем каждое из трех параллельных устройств 204 управления двигателем имеет номинальную мощность 50 кВт. Объединенная мощность в 150 кВт трех параллельных устройств 204 управления двигателем динамически перераспределена между кабинным воздушным компрессором и гидравлическим насосом электродвигателя по мере того, как текущие рабочие потребности двух двигателей 108 изменяются во время различных фаз полета 306.
В качестве примера было обнаружено, что во время наземных операций обеспечена выдача мощности в 100 кВт на кабинный воздушный компрессор, а также обеспечена выдача мощности в 50 кВт на гидравлический насос электродвигателя. Для этого два параллельных устройства 204 управления двигателем соединены с кабинным воздушным компрессором, а устройство 204 управления двигателем соединено с гидравлическим насосом электродвигателя. Во время запуска двигателя устройства 204 управления двигателем могут быть соединены с генератором таким образом, что все 150 кВт доступной мощности направлены на генератор для запуска двигателя. Данная архитектура будет дополнительно описана далее со ссылкой на фиг. 4В.
Во время руления и взлета рабочие потребности двигателей 108 приводят к перенастройке схемы 202 переключения питания таким образом, что выходная мощность на кабинный воздушный компрессор уменьшена до 50 кВт, а выходная мощность от двух из параллельных устройств 204 управления двигателем перенаправлена на гидравлический насос электродвигателя. Во время набора высоты, крейсерского полета и снижения мощность в 100 кВт направлена на кабинный воздушной компрессор, а мощность в 50 кВт направлена на гидравлический насос электродвигателя. В итоге, во время приземления, когда существует более высокая потребность в отношении гидравлического насоса электродвигателя вследствие выпуска посадочных шасси и конкретных поверхностей управления полетом, обеспечено переключение мощности для выдачи мощности в 100 кВт на гидравлический насос электродвигателя и выдачи мощности в 50 кВт на кабинный воздушный компрессор.
Следует понимать, что значения требований 304 к силовой нагрузке кабинного воздушного компрессора и гидравлического насоса электродвигателя заданы для иллюстративных целей с тем, чтобы показать дополняющую сущность потребностей в мощности двух двигателей 108 и динамической перенастройки схемы 202 переключения питания для перераспределения мощности согласно требованиям к силовой нагрузке двигателей 108. Следует также понимать, что, несмотря на то, что показаны только иллюстративные данные для кабинного воздушного компрессора и гидравлического насоса электродвигателя, могут быть использованы любое количество и любой тип двигателей 108, а доступная мощность от всех параллельных устройств 204 управления двигателем может быть распределена динамическим образом между всеми двигателями 108.
На фиг. 4А показана иллюстративная система 400 распределения мощности, которая будет использована на всех фиг. 4В-4Е для иллюстрации динамической перенастройки электрических соединений в схеме 202 переключения питания для перенаправления энергии от одного или более параллельных устройств 204 управления двигателем на один или более двигателей 108 по мере того, как текущие рабочие потребности двигателей изменяются во время различных фаз полета. Во всех этих примерах, показанных на фиг. 4А-4Е, шесть параллельных устройств 204A-204F управления двигателем выдают энергию на четыре двигателя 108, включая генератор 108А, кабинный воздушный компрессор 108В, насос 108С и вентилятор 108D.
На фиг. 4В показана система 402 распределения мощности запуска двигателей, которая отражает электрические соединения в схеме 202 переключения питания во время запуска двигателя воздушного летательного аппарата с использованием генератора 108А. В данном сценарии генератор 108А требует очень большой силовой нагрузки. В итоге, все параллельные устройства 204 управления двигателем электрически соединены с генератором 108А, что приводит устройство 204F управления двигателем в состояние выдачи некоторой энергии на вентилятор 108D для охлаждения оборудования воздушного летательного аппарата.
На фиг. 4С показана система 404 взлетной мощности, которая отражает электрические соединения в схеме 202 переключения питания во время взлета воздушного летательного аппарата. Поскольку генератор 108А больше не требует энергии от параллельных устройств 204 управления двигателем после запуска двигателя, то показано, что генератор 108А выдает энергию на шину 450. Параллельные устройства 204 управления двигателем, которые подавали энергию на генератор 108А во время запуска двигателя, были перенастроены для подачи энергии на кабинный воздушный компрессор 108В и насос 108С. Во время взлета настоящее требование 304 к силовой нагрузке насоса 108С выше требования к силовой нагрузке кабинного воздушного компрессора 108В. В итоге, в данном примере два параллельных устройства 204А управления двигателем и 204В соединены с кабинным воздушным компрессором 108В, а три параллельных устройства 204С-204Е управления двигателем соединены с насосом 108С.
На фиг. 4D показана система 406 распределения мощности для крейсерского полета, в которой обеспечена возможность перенастройки схемы 202 переключения питания во время условий крейсерского полета. Поскольку требования 304 к силовой нагрузке кабинного воздушного компрессора 108В и насоса 108С являются взаимодополняющими (как показано на фиг. 3), то соединение параллельного устройства 204С управления двигателем переключено от насоса 108С на кабинный воздушный компрессор 108В во время крейсерского полета для удовлетворения более высоким потребностям в силовой нагрузке кабинного воздушного компрессора 108В.
На фиг. 4Е показана система 408 распределения мощности согласно потребности в гидравлической мощности, в которой обеспечена возможность перенастройки схемы 202 переключения питания в течение временных условий состояния гидравлики, таких как подъем и выпуск посадочных шасси и реверсирование тяги двигателей. Как можно видеть, четыре из шести параллельных устройств 204 управления двигателем электрически соединены с насосом 108С. Как это имеет место в любом из представленных сценариев, как только происходит ослабление требования 304 к высокой силовой нагрузке насоса 108С происходит очередная перенастройка схемы 202 переключения питания согласно настоящим требованиям к силовой нагрузке 304 всех двигателей 108.
На фиг. 5А-5С показаны альтернативные конфигурации 500, 520 и 540 системы устройств управления двигателем для иллюстрации различных мест размещения внешнего фильтра 510 в соответствии с различными вариантами реализации. Обычные устройства 106 управления двигателем используют фильтры для обеспечения содействия в приведении сигналов в определенное состояние для использования двигателем 108. На фиг. 5А показан один вариант реализации, в котором параллельные устройства 204А и 204В управления двигателем соединены со схемой 202 переключения питания для подачи энергии на двигатель 108. В данном примере, источник 102 энергии выдает сигнал переменного тока (АС) на параллельные устройства 204 управления двигателем.
Каждое устройство 204 управления двигателем содержит входной фильтр 502, выходной фильтр 510 и промежуточный фильтр 506, который расположен между выпрямительным устройством 504 и обратным преобразователем 508. Следует принимать во внимание, что компоненты параллельных устройств 204 управления двигателем не ограничены компонентами, показанными на фиг. 5А-5С, и что компоненты любого заданного параллельного устройства 204 управления двигателем могут отличаться от показанных компонент. Например, когда источник 102 энергии выдает энергию питания постоянного тока (DC) на параллельное устройства 204 управления двигателем, то эти параллельные устройства 204 управления двигателем могут содержать входной фильтр 502, обратный преобразователь 508 и выходной фильтр 510, без необходимости в наличии выпрямительного устройства 504 или любых дополнительных фильтров.
На фиг. 5В показана альтернативная конфигурация 520 устройства управления двигателем, в которой параллельные устройства 204 управления двигателем совместно используют одиночный выходной фильтр 510. В данном варианте реализации выходной фильтр 510 может быть соединен с двигателем 108 таким образом, что энергия, принимаемая от схемы 202 переключения питания, представляет собой входной сигнал в выходной фильтр 510 перед ее приемом двигателем 108. Это обеспечивает возможность удаления выходных фильтров 510 из параллельных устройств 204 управления двигателем. Совместное использование выходного фильтра 510, а не наличие выходного фильтра 510 в своем составе, в каждом параллельном устройстве 204 управления двигателем сохраняет общий вес системы, поскольку фильтры могут представлять собой относительно тяжелые компоненты.
Для дополнительного сохранения веса, вариант реализации, показанный на фиг. 5С, иллюстрирует альтернативную конфигурацию 540 устройства управления двигателем, в которой один или более параллельных устройств 204 управления двигателем не используют выходной фильтр 510. Обычно, выходные фильтры 510 используют благодаря длине силовых линий от параллельных устройств 204 управления двигателем в отсеке оборудования воздушного летательного аппарата или другого транспортного средства к двигателям 108. Электрический сигнал от параллельных устройств 204 управления двигателем может быть выполнен в виде сигнала широтно-импульсной модуляции или сигналов переключения (прямоугольных сигналов), которые содержат существенную гармоническую составляющую, которая усиливается полным сопротивлением силовых линий к тому времени, когда сигналы принимаются двигателями 108. Выходные фильтры 510 в параллельных устройствах 204 управления двигателем сглаживают формы волн и предотвращают повреждение двигателей 108, вызываемое усиленными гармониками неотфильтрованных прямоугольных форм волн. Однако в вариантах реализации, в которых параллельные устройства 204 управления двигателем расположены рядом с двигателями 108, или если излучения от силовых линий не являются предметом рассмотрения, то затем альтернативная конфигурация 540 устройства управления двигателем, которая показана на фиг. 5С и которая не содержит каких-либо выходных фильтров 510, может быть использована для дополнительной минимизации веса системы устройств управления двигателем.
Следует принимать во внимание, что логические операции, описанные на фиг. 6-17 реализованы (1) в виде последовательности реализуемых на компьютере действий или программных модулей, запускаемых на вычислительной системе и/или (2) в виде соединенных логических схем вычислительной машины или электронных модулей в вычислительной системе. Вычислительная система может представлять собой часть схемы 202 переключения питания или может быть соединена с ней и будет описана далее со ссылкой на фиг. 18. Реализация логических операций, описанных в настоящей заявке, является предметом выбора, зависящего от технических характеристик и других требований вычислительной системы. Соответственно, логические операции, описанные в настоящей заявке, называются по-разному как операций состояний, конструктивные устройства, действия или модули. Эти операции, конструктивные устройства, действия и модули могут быть реализованы в программном обеспечении, в программно-аппаратных средствах, в специальной цифровой логической схеме или их сочетании. Следует также понимать, что большее или меньшее количество операций могут быть выполнены по сравнению с количеством операций, показанных на фигурах и описанных в настоящей заявке. Эти операции могут быть также выполнены в порядке, отличном от порядка, описанного в настоящей заявке.
На фиг. 6 будет описана иллюстративная процедура 600 из уровня техники для управления группой двигателей 108. Процедура 600 начинается с операции 602, согласно которой определяют настоящие требования 304 к силовой нагрузке каждого двигателя 108. Данная операция и другие операции могут быть выполнены приложением для перенастройки устройств управления двигателем, выполняемым на компьютерной системе, в виде части схемы 202 переключения питания или в сочетании со схемой 202 переключения питания. Как описано выше, настоящее требование 304 к силовой нагрузке двигателя 108 представляет потребность в рабочей мощности в данный момент времени. Как показано на фиг. 3, настоящее требование 304 к силовой нагрузке двигателя 108 в воздушном летательном аппарате или другом транспортном средстве или платформе может изменяться в соответствии с фазой работы, такой как различные фазы полета 306. Настоящие требования 304 к силовой нагрузке различных двигателей 108 могут являться дополняющими, так что увеличение в требовании к мощности для одного двигателя 108 совпадает с соответствующим уменьшением в требовании к мощности для другого двигателя 108, что обеспечивает возможность динамической перенастройки электрических соединений в схеме 202 переключения питания, которая описана в настоящей заявке.
После операции 602 процедура 600 продолжается с операции 604, согласно которой определяют количество параллельных устройств 204 управления двигателем, которые должны быть соединены с каждым двигателем 108. Как описано выше, определенное количество параллельных устройств 204 управления двигателем, которые должны быть соединены с любым заданным двигателем 108, может содержать малое количество параллельных устройств 204 управления двигателем, которые выполнены с возможностью удовлетворения настоящему требованию 304 к силовой нагрузке конкретного двигателя 108. Например, если двигатель 108 использует мощность в 100 кВт, то затем два параллельных устройства 204 управления двигателем, каждый из которых выполнен с возможностью обеспечения мощности в 50 кВт, соединены с двигателем 108. На операции 606 схема 202 переключения питания выполнена в соответствии с соединением параллельных устройств 204 управления двигателем с двигателями 108 согласно настоящим требованиям к силовой нагрузке двигателей, которые определяют на операции 604. Следует принимать во внимание, что схема 202 переключения питания выполнена с возможностью приведения в действие любого количества электронных переключателей в схеме, соединяющей параллельные устройства 204 управления двигателем с каждым из двигателей 108.
После операции 606 процедура 600 продолжается с операции 608, гласно которой контролируют систему устройств управления двигателем для запросов действий двигателя. Согласно одному варианту реализации, запрос действия двигателя может представлять собой любое приведение в действие или перемещение переключателя, рычага, управляющего устройства или другого устройства, используемого для управления системой, которая использует один или более двигателей 108. Например, в среде воздушного летательного аппарата, запрос действия двигателя может содержать, однако не ограничен, выпуск или подъем посадочных шасси, приведение в действие или перемещение средств управления для перемещения поверхности управления полетом и приведение в действие насоса. Следует принимать во внимание, что запрос действия двигателя может представлять собой результат действия, предпринятого человеком, или может представлять собой результат управляемого компьютером действия. Следует также понимать, что операция контроля может содержать активный контроль или опрос любого количества систем или может представлять собой пассивный контроль, такой как прием запроса.
На операции 610, если запрос действия двигателя не принят, то затем процедура 600 возвращается к операции 608 и контроль продолжается. Однако, если на операции 610 определено, что запрос действия двигателя был выполнен или был принят, то затем процедура 600 возвращается к операции 602, согласно которой настоящие требования 304 к силовой нагрузке двигателей 108 подвергают переоценке, а процедура 600 продолжается как описано выше. Таким образом, схема 202 переключения питания может быть динамически перенастроена с тем, чтобы реагировать на изменения в требованиях 304 к силовой нагрузке двигателей 108 путем перенаправления энергии от параллельных устройств 204 управления двигателем к надлежащим двигателям 108.
Со ссылкой на фиг. 7 далее будет описана иллюстративная процедура 7000 для управления группой двигателей 108 путем снижения нагрузки и перенастройки. Процедура 7000 начинается с операции 7010 путем определения первоначальной потребности в силовой нагрузке на основании первой потребности в силовой нагрузке для первого двигателя и второй потребности в силовой нагрузке для второго двигателя. Следующий этап, на операции 7020, включает определение максимальной выходной мощности на основании нагрузочной способности по мощности первого устройства управления двигателем, нагрузочной способности по мощности второго устройства управления двигателем и нагрузочной способности по мощности третьего устройства управления двигателем. Следующий этап, на операции 7030, включает определение того, что нагрузочная способность по мощности первого устройства управления двигателем является достаточной для согласования с первой потребностью в силовой нагрузке и что нагрузочная способность по мощности второго устройства управления двигателем является достаточной для согласования со второй потребностью в силовой нагрузке. Следующий этап, на операции 7040, включает назначение первой совокупности общесистемных приоритетов по меньшей мере частично на основании максимальной выходной мощности, первой потребности в силовой нагрузке и второй потребности в силовой нагрузке. Следующий этап, на операции 7050, включает осуществление настройки схемы переключения питания для соединения вместе устройства управления первым двигателем с первым двигателем и устройства управления вторым двигателем со вторым двигателем. Следующий этап, на операции 7070, включает определение обновленной потребности в силовой нагрузке на основании первоначальной потребности в силовой нагрузке и третьей потребности в силовой нагрузке. Следующий этап, на операции 7060, включает прием запроса мощности от блока управления для обеспечения третьей потребности в силовой нагрузке для третьего двигателя. Следующий этап, на операции 7070, включает определение обновленной потребности в силовой нагрузке на основании первоначальной потребности в силовой нагрузке и третьей потребности в силовой нагрузке.
Со ссылкой на фиг. 7, вслед за определением обновленной потребности в силовой нагрузке, следующий этап, на операции 7080, включает определение того, что обновленная потребность в силовой нагрузке больше значения максимальной выходной мощности. Следующий этап, на операции 7090, включает назначение второй совокупности общесистемных приоритетов, которые назначают третьему двигателю более высокий приоритет по сравнению с приоритетом второго двигателя, и по меньшей мере частично основан на максимальной выходной мощности, первой потребности в силовой нагрузке, второй потребности в силовой нагрузке и третьей потребности в силовой нагрузке. Разветвление 'ИЛИ' на этапе 7100 отражает два иллюстративных варианта реализации настоящего изобретения, причем при запуске на этапе 7111, архитектура параллельных устройств управления двигателем перенастраивает свои ресурсы путем полного отвода энергии из одного двигателя к другому двигателю, а при запуске на этапе 7121, архитектуру параллельных устройств управления двигателем адаптируют к запросам энергии посредством высокоприоритетных двигателей путем отвода только необходимого количества энергии, пока это необходимо.
Вариант реализации перенастройки, на этапе 7111, включает определение того, что нагрузочная способность по мощности третьего устройства управления двигателем в комбинации с нагрузочной способностью по мощности второго устройства управления двигателем требуются для согласования с третьей потребностью в силовой нагрузке. Следующий этап, на операции 7112, включает осуществление настройки схемы переключения питания для отсоединения устройства управления вторым двигателем от второго двигателя и для последующего соединения устройства управления вторым двигателем и устройства управления третьим двигателем с третьим двигателем. Следующий этап, на операции 7113, включает идентификацию того, что запрос энергии не является более действительным. Следующий этап, на операции 7114, включает повторное назначение первой совокупности общесистемных приоритетов. Окончательный этап данного варианта реализации, на операции 7115, включает осуществление настройки схемы переключения питания для отсоединения устройства управления вторым двигателем от третьего двигателя и для последующего повторного соединения устройства управления вторым двигателем со вторым двигателем.
Вариант реализации для уменьшения нагрузки, на этапе 7121, включает определение того, что нагрузочная способность по мощности третьего устройства управления двигателем в комбинации с первой частью нагрузочной способности по мощности второго устройства управления двигателем является достаточной для согласования с третьей потребностью в силовой нагрузке. Следующий этап, на операции 7122, включает осуществление настройки схемы переключения питания для соединения устройства управления вторым двигателем с третьим двигателем, для направления устройства управления вторым двигателем для передачи первой части нагрузочной способности по мощности второго устройства управления двигателем с третьим двигателем и для соединения устройства управления третьим двигателем с третьим двигателем. Следующий этап, на операции 7123, включает идентификацию того, что запрос энергии не является более действительным. Следующий этап, на операции 7124, включает повторное назначение первой совокупности общесистемных приоритетов. Окончательный этап данного варианта реализации, на операции 7125, включает осуществление настройки схемы переключения питания для отсоединения устройства управления вторым двигателем от третьего двигателя и для последующего повторного соединения устройства управления вторым двигателем со вторым двигателем, что обеспечивает полное согласование со второй потребностью в силовой нагрузке.
Со ссылкой на фиг. 8 далее будет описана иллюстративная процедура 800, направленная, в частности, на новую логическую схему управления электрическим запуском основного двигателя. Процедура 800 начинается с операции 810, согласно которой блок управления питанием шины будет определять то, сколько энергии доступно для параллельного модульного преобразователя. На операции 820 параллельный модульный преобразователь настраивает схему переключения питания для запуска двигателя, причем для этой операции сообщают результат определения вращающего момента 811 посредством электронного устройства управления двигателем (которое взаимодействует с параллельным модульным преобразователем), а приведение в действие блока управления генератором открывает устройство прерывания цепи генератора и применяет возбуждение к стартеру-генератору 812. На операции 830 параллельный модульный преобразователь выбирает подходящий алгоритм управления двигателем на основании информации, которая ему доступна. На операции 840 параллельный модульный преобразователь подает энергию к стартеру-генератору двигателя, а информацию обратной связи о скорости совместно используют между параллельным модульным преобразователем и электронным устройством управления двигателем, которое контролирует скорость 841 двигателя. На операции 850, если скорость отсечки стартера не достигнута, то затем операция 840 начинается снова, однако, если скорость отсечки стартера достигнута, то затем параллельный модульный преобразователь будет инициировать плавное выключение и выходить из режима 860 контроля стартера-генератора. На операции 880 блок управления питанием шины будет высвобождать запас энергии на другие системы и будет взаимодействовать с электронным устройством управления двигателем и блоком управления генератором, режим которого более не является настроенным на электрический запуск основного двигателя, а затем начнутся операции 881 и 882. На операции 881 электронное устройство управления двигателем является активным, а на операции 882 блок управления генератором будет удалять возбуждение и запускать переход в режим генерирования.
Со ссылкой на фиг. 9 далее будет описана иллюстративная процедура 900, направленная, в частности, на новую логическую схему управлений электрическим запуском двигателя со вспомогательным источнику питания. Процедура 900 начинается с операции 910, согласно которой блок управления питанием шины будет определять то, сколько энергии доступно для параллельного модульного преобразователя. На операции 920 параллельный модульный преобразователь настраивает схему переключения питания для запуска двигателя, причем для этой операции сообщают результат определения вращающего момента 911 посредством устройства управления вспомогательным блоком питания (которое взаимодействует с параллельным модульным преобразователем), а приведение в действие блока управления вспомогательным генератором открывает устройство прерывания цепи вспомогательного стартера-генератора и применяет возбуждение к стартеру-генератору 912. На операции 930 параллельный модульный преобразователь выбирает подходящий алгоритм управления двигателем на основании информации, которая ему доступна. На операции 940 параллельный модульный преобразователь подает энергию к стартеру-генератору двигателя, а информацию обратной связи о скорости совместно используют между параллельным модульным преобразователем и устройством управления вспомогательным блоком питания, которое контролирует скорость 941 двигателя. На операции 950, если скорость отсечки стартера не достигнута, то затем операция 940 начинается снова, однако, если скорость отсечки стартера достигнута, то затем параллельный модульный преобразователь будет инициировать плавное выключение и выходить из режима 960 контроля стартера-генератора. На операции 980 блок управления питанием шины высвободит запас энергии на другие системы и будет взаимодействовать с устройством управления вспомогательным блоком питания и блоком управления вспомогательным генератором, режим которого более не является настроенным на электрический запуск вспомогательного двигателя, а затем начнутся операции 981 и 982. На операции 981 вспомогательный двигатель является активным, а на операции 982 блок управления вспомогательным генератором будет удалять возбуждение и запустит переход на режим генерирования.
Со ссылкой на фиг. 10 далее будет описана иллюстративная процедура 1000, направленная, в частности, на новую логическую схему управления электрическим запуском двигателя со вспомогательным блоком питания от батарейного источника. Процедура 1000 начинается с операций 1010, согласно которой блок управления питанием шины будет определять то, сколько энергии доступно для параллельного модульного преобразователя. На операции 1020 параллельный модульный преобразователь настраивает схему переключения питания для запуска батарейного вспомогательного блока питания, причем для этой операции сообщают результат определения вращающего момента 1011 посредством устройства управления вспомогательным блоком питания (которое взаимодействует с параллельным модульным преобразователем), а приведение в действие блока управления вспомогательным генератором открывает устройство прерывания цепи вспомогательного стартера-генератора и применяет возбуждение к стартеру-генератору 1013. Следует отметить, что перед операцией 1013, выполняемой блоком управления вспомогательным генератором, на операции 1012 блок увеличения напряжения батареи инициирует преобразование энергии для возбуждения вспомогательного стартера-генератора и высокое напряжение для параллельного модульного преобразователя. На операции 1030 параллельный модульный преобразователь выбирает подходящий алгоритм управления двигателем на основании информации, которая ему доступна. На операции 1040 параллельный модульный преобразователь подает энергию к стартеру-генератору двигателя, а информацию обратной связи о скорости совместно используют между параллельным модульным преобразователем и устройством управления вспомогательным блоком питания, который контролирует скорость 1041 двигателя. На операции 1050, если скорость отсечки стартера не достигнута, то затем операция 1040 начинается снова, однако, если скорость отсечки стартера достигнута, то затем параллельный модульный преобразователь будет инициировать плавное выключение и выходить из режима 1060 контроля стартера-генератора. На операции 1080 блок управления питанием шины высвободит запас энергии на другие системы и будет взаимодействовать с устройством управления вспомогательным блоком питания и блоком управления вспомогательным генератором, режим которого более не является настроенным на электрический запуск батарейного вспомогательного двигателя, а затем начнутся операции 1081 и 1083. На операции 1081 вспомогательный двигатель является активным, а на операции 1083 блок управления вспомогательным генератором будет удалять возбуждение и запустит переход в режим генерирования, а на операции 1082 блок увеличения напряжения батареи будет останавливать преобразование энергии для возбуждения вспомогательного стартера-генератора и параллельного модульного преобразователя.
Со ссылкой на фиг. 11 далее будет описана иллюстративная процедура 1100, направленная, в частности, на логическую схему управления электрическим рулением. Процедура 1100 начинается с операции 1110, согласно которой блок управления питанием шины будет определять то, сколько энергии доступно для параллельного модульного преобразователя. На операции 1120 параллельный модульный преобразователь настраивает схему переключения питания для режима электрического руления, причем для этой операции сообщают результат определения вращающего момента, скорости и ускорения и/или замедления 1111 посредством устройства управления электрическим рулением (которое взаимодействует с параллельным модульным преобразователем), а функционирование устройства управления электрическими тормозами информирует о состоянии тормозов 1112. На операции 1130 параллельный модульный преобразователь выбирает подходящий алгоритм управления двигателем на основании информации, которая ему доступна. На операции 1140 параллельный модульный преобразователь подает энергию на двигатель для электрического руления, а информацию обратной связи о скорости, ускорении и замедлении совместно используют между параллельным модульным преобразователем и устройством управления электрическим рулением, которое контролирует скорость двигателя, ускорение и скорость 1141 торможения. На операции 1150 параллельный модульный преобразователь контролирует блок управления питанием шины и устройство управления электрическим рулением, а если команда на остановку не была получена, то затем операция 1140 начинается снова, однако, если команда на остановку была получена, то затем параллельный модульный преобразователь будет инициировать плавное выключение и выйдет из режима 1160 двигателя для электрического руления. На операции 1180 блок управления питанием шины высвободит запас энергии на другие системы и будет взаимодействовать с устройством управления электрическим рулением, режим которого более не является настроенным на электрическое руление, а затем начнется операция 1181. На операции 1181 самолет не находится в режиме руления, а на операции 1182 устройство управления электрическими тормозами выдает состояние электрических тормозов.
Со ссылкой на фиг. 12 далее будет описана иллюстративная процедура 1200, направленная, в частности, на новую логическую схему управления кабинным воздушным компрессором. Процедура 1200 начинается с операции 1201, согласно которой существует запрос режима кабинного воздушного компрессора в блоке управления установкой кондиционирования воздуха. На операции 1210 блок управления питанием шины будет определять то, сколько энергии доступно для параллельного модульного преобразователя. На операции 1220 параллельный модульный преобразователь настраивает схему переключения питания для режима кабинного воздушного компрессора, причем для этой операции сообщают команду о скорости блока управления установкой кондиционирования воздуха (который взаимодействует с параллельным модульным преобразователем). На операции 1230 параллельный модульный преобразователь выбирает подходящий алгоритм управления двигателем на основании информации, которая ему доступна. На операции 1240 параллельный модульный преобразователь подает энергию на двигатель кабинного воздушного компрессора, а информацию обратной связи о скорости совместно используют между параллельным модульный преобразователем и блоком управления установкой кондиционирования воздуха, который контролирует скорость 1241 двигателя. На операции 1250 параллельный модульный преобразователь контролирует блок управления питанием шины и устройство управления для управления блоком управления установкой кондиционирования воздуха, а если команда на остановку не была получена, то затем операция 1240 начинается снова, однако, если команда на остановку была получена, то затем параллельный модульный преобразователь будет инициировать плавное выключение и выходить из режима 1260 двигателя кабинного воздушного компрессора. На операции 1280 блок управления питанием шины высвободит запас энергии на другие системы и будет взаимодействовать с блоком управления установкой кондиционирования воздуха, режим которого более не является настроенным на кабинный воздушный компрессор, а затем начнется операция 1281. На операции 1281 кабинный воздушный компрессор не является активным.
Со ссылкой на фиг. 13 далее будет описана иллюстративная процедура 1300, направленная, в частности, на новую логическую схему управления гидравлическим насосом. Процедура 1300 начинается с операции 1301, согласно которой существует запрос режима гидравлического насоса в устройстве управления гидравлическим насосом. На операции 1310 блок управления питанием шины будет определять то, сколько энергии доступно для параллельного модульного преобразователя. На операции 1320 параллельный модульный преобразователь настраивает схему переключения питания для режима гидравлического насоса, причем для этой операции сообщают команду о скорости устройства управления гидравлическим насосом (который взаимодействует с параллельным модульным преобразователем). На операции 1330 параллельный модульный преобразователь выбирает подходящий алгоритм управления двигателем на основании информации, которая ему доступна. На операции 1340 параллельный модульный преобразователь подает энергию на двигатель гидравлического насоса, а информацию обратной связи о скорости совместно используют между параллельным модульным преобразователем и устройством управления гидравлическим насосом, которое контролирует скорость 1341 двигателя. На операции 1350 параллельный модульный преобразователь контролирует блок управления питанием шины и устройство управления гидравлическим насосом, а если команда на остановку не была получена, то затем операция 1340 начинается снова, однако, если команда на остановку была получена, то затем параллельный модульный преобразователь будет инициировать плавное выключение и выходить из режима 1360 двигателя гидравлического насоса. На операции 1380 блок управления питанием шины высвободит запас энергии на другие системы и будет взаимодействовать с устройством управления гидравлическим насосом, режим которого более не является настроенным на гидравлический насос, а затем начнется операция 1390. На операции 1390 гидравлический насос не является активным.
Со ссылкой на фиг. 14 далее будет описана иллюстративная процедура 1400, направленная, в частности, на новую логическую схему управления системой создания азота. Процедура 1400 начинается с операции 1401, согласно которой существует запрос режима системы создания азота в устройстве управления системой создания азота. На операции 1410 блок управления питанием шины будет определять то, сколько энергии доступно для параллельного модульного преобразователя. На операции 1420 параллельный модульный преобразователь настраивает схему переключения питания для режима системы создания азота, причем для операции сообщают команду о скорости устройства управления системой создания азота (которое взаимодействует с параллельным модульным преобразователем). На операции 1430 параллельный модульный преобразователь выбирает подходящий алгоритм управления двигателем на основании информации, которая ему доступна. На операции 1440 параллельный модульный преобразователь подает энергию на двигатель системы создания азота, а информацию обратной связи о скорости совместно используют между параллельным модульным преобразователем и устройством управления системой создания азота, которое контролирует скорость 1441 двигателя. На операции 1450 параллельный модульный преобразователь контролирует блок управления питанием шины и устройство управления системой создания азота, а если команда на остановку не была получена, то затем операция 1440 начинается снова, однако, если команда на остановку была получена, то затем параллельный модульный преобразователь будет инициировать плавное выключение и выходить из режима 1460 двигателя системы создания азота. На операции 1480 блок управления питанием шины высвободит запас энергии на другие системы и будет взаимодействовать с устройством управления системой создания азота, режим которого более не является настроенным на систему создания азота, а затем начнется операция 1481. На операции 1481 компрессор системы создания азота не является активным.
Со ссылкой на фиг. 15 далее будет описана иллюстративная процедура 1500, направленная, в частности, на новую логическую схему для управления вентилятором системы управления условиями окружающей среды. Процедура 1500 начинается с операции 1501, согласно которой существует запрос режима вентилятора системы управления условиями окружающей среды в устройстве управления для управления вентилятором системы управления условиями окружающей среды. На операции 1510 блок управления питанием шины будет определять то, сколько энергии доступно для параллельного модульного преобразователя. На операции 1520 параллельный модульный преобразователь настраивает схему переключения питания для режима вентилятора системы управления условиями окружающей среды, причем для этой операции сообщают команду о скорости устройства управления для управления вентилятором системы управления условиями окружающей среды (которое взаимодействует с параллельным модульным преобразователем). На операции 1530 параллельный модульный преобразователь выбирает подходящий алгоритм управления двигателем на основании информации, которая ему доступна. На операции 1540 параллельный модульный преобразователь подает энергию на двигатель вентилятора системы управления условиями окружающей среды, а информацию обратной связи о скорости совместно используют между параллельным модульным преобразователем и устройством управления для управления вентилятором системы управления условиями окружающей среды, которое контролирует скорость 1541 двигателя. На операции 1550 параллельный модульный преобразователь контролирует блок управления питанием шины и устройство управления для управления вентилятором системы управления условиями окружающей среды, которое, а если команда на остановку не была получена, то затем операция 1540 начинается снова, однако, если команда на остановку была получена, то затем параллельный модульный преобразователь будет инициировать плавное выключение и выходить из режима 1560 двигателя вентилятора системы управления условиями окружающей среды. На операции 1580 блок управления питанием шины высвободит запас энергии на другие системы и будет взаимодействовать с устройством управления для управления вентилятором системы управления условиями окружающей среды, режим которого более не является настроенным на вентилятор системы управления условиями окружающей среды, а затем начнется операция 1581. На операции 1581 вентилятор системы управления условиями окружающей среды не является активным.
Co ссылкой на фиг. 16 далее будет описана иллюстративная процедура 1600, направленная, в частности, на новую логическую схему для управления системой охлаждения груза. Процедура 1600 начинается с операции 1601, согласно которой существует запрос режима системы охлаждения груза в устройстве управления системой охлаждения груза. На операции 1610 блок управления питанием шины будет определять то, сколько энергии доступно для параллельного модульного преобразователя. На операции 1620 параллельный модульный преобразователь настраивает схему переключения питания для режима системы охлаждения груза, причем для этой операции сообщают команду о скорости устройства управления системой охлаждения груза (которое взаимодействует с параллельным модульным преобразователем). На операций 1630 параллельный модульный преобразователь выбирает подходящий алгоритм управления двигателем на основании информации, которая ему доступна. На операции 1640 параллельный модульный преобразователь подает энергию на двигатель системы охлаждения груза, а информацию обратной связи о скорости совместно используют между параллельным модульным преобразователем и устройством управления системой охлаждения груза, которое контролирует скорость 1641 двигателя. На операции 1650 параллельный модульный преобразователь контролирует блок управления питанием шины и устройством управления системой охлаждения груза, а если команда на остановку не была получена, то затем операция 1640 начинается снова, однако, если команда на остановку была получена, то затем параллельный модульный преобразователь будет инициировать плавное выключение и выходить из режима 1660 двигателя системы охлаждения груза. На операции 1680 блок управления питанием шины высвободит запас энергии на другие системы и будет взаимодействовать с устройством управления системой охлаждения груза, режим которого более не является настроенным на систему охлаждения груза, а затем начнется операция 1681. На операции 1681 компрессор системы охлаждения груза не является активным.
Со ссылкой на фиг. 17 далее будет описана иллюстративная процедура 1700 направленная, в частности, на новую логическую схему управления снижением нагрузки и реконфигурацией, в качестве предпочтительного варианта реализации настоящего изобретения. Процедура 1700 начинается с операции 1710, согласно которой параллельный модульный преобразователь принимает выходные данные блока управления питанием шины (сообщает конкретный запрос режима и мощность, связанную с этим режимом) и устанавливают конфигурацию параллельного модульного преобразователя, включая общее количество устройств управления двигателем (или модулей), мощность каждого из них и информацию о наличии тех, которые вышли из строя. Следующий этап, на операции 1720, осуществляют определение того, какие режимы являются активными в текущий момент времени, и того, какая мощность потребляется в результате этих активных режимов. На этапе 1730 осуществляют определение текущей нагрузочной способности по мощности, которая все еще доступна для использования другими режимами. На этапе 1740 принимают решение, если текущая нагрузочная способность по мощности не меньше мощности, необходимой для режима, запрашиваемого блоком управления питанием шины, то затем параллельный модульный преобразователь активирует запрашиваемый режим при запрашиваемой мощности, система параллельных модульных преобразователей уменьшает свою оставшуюся нагрузочную способность по мощности для учета запуска этого нового режима 1741, а блок управления питанием шины информируют об этом на этапе 1742. Если текущая нагрузочная способность по мощности меньше, чем мощность, необходимая для запрашиваемого режима, то затем осуществляют определение приоритета запрашиваемого режима по отношению к другим активным режимам 1750. Если приоритет запрашиваемого режима ниже приоритета всех других текущих активных режимов или равен ему, то затем параллельный модульный преобразователь активирует запрашиваемый режим только при доступной в текущий момент времени мощности, параллельный модульный преобразователь устанавливает свою оставшуюся нагрузочную способность по мощности в ноль 1760, а блок управления питанием шины информируют о том, что запрашиваемый режим оказывается активированным с уменьшенной энергией и что доступная нагрузочная способность по мощности параллельного модульного преобразователя составляет ноль.
На этапе 1770, если приоритет запрашиваемого режима выше приоритета по меньшей мере одного другого активного в текущий момент времени режима и если возможно уменьшить энергию, подаваемую на указанный по меньшей мере один другой низкоприоритетный режим 1771, то затем общая энергия для любых таких режимов с низким приоритетом будет уменьшена с тем, чтобы обеспечить баланс мощности, необходимый для согласования с мощностью, запрошенной для запрашиваемого режима, а параллельный модульный преобразователь будет активировать запрашиваемый режим и устанавливать оставшуюся нагрузочную способность по мощности в ноль 1772 с одновременным информированием блока 1773 управления питанием шины о том, что низкоприоритетный режим является активным при мощности, меньшей запрашиваемой мощности, и что общая оставшаяся нагрузочная способность по мощности параллельного модульного преобразователя составляет ноль. На этапе 1776, если пошаговое уменьшение в подаче энергии для низкоприоритетных режимов не является возможным, то затем рассчитывают результат определения максимально возможного уменьшения как результат полного отключения всех низкоприоритетных режимов, а запрашиваемый режим снабжают энергией, ранее направленной на эти низкоприоритетные режимы.
На этапе 1780, если приоритет запрашиваемого режима превышает приоритет по меньшей мере двух активных текущих режимов, один из которых имеет больший приоритет по сравнению с приоритетом по меньшей мере одного другого активного текущего режима, и если возможно уменьшить энергию, подаваемую на указанный по меньшей мере одни другие низкоприоритетные режимы 1781, то затем общая энергия для любых таких низкоприоритетных режимов будет уменьшена с тем, чтобы обеспечивать баланс мощности, необходимый для согласования с мощностью, запрошенной для запрашиваемого режима, а параллельный модульный преобразователь будет активировать запрашиваемый режим и будет информировать блок управления питанием шины, низкоприоритетные нагрузки которого оказываются активированы при более низкой мощности, и что оставшаяся нагрузочная способность по мощности параллельного модульного преобразователя составляет ноль 1782. На этапе 1786, если пошаговое уменьшение в подаче энергии для режимов с наиболее низкими приоритетами не является возможным, то затем рассчитывают результат определения максимально возможного уменьшения как результат полного отключения всех режимов с наиболее низким приоритетом и частичного отключения всех режимов с приоритетом, который ниже приоритета запрашиваемого режима, но выше приоритета режимов с наиболее низким приоритетом, а запрашиваемый режим снабжают энергией, ранее направленной на эти низкоприоритетные режимы. На этапе 1790, если уменьшение в подаче энергии, описанное на этапе 1786, не является возможным, то затем рассчитывают результат определения максимально возможного уменьшения как результат полного отключения всех низкоприоритетных режимов, а запрашиваемый режим снабжают энергией, ранее направленной на эти низкоприоритетные режимы. Данный процесс может быть повторен до тех пор, пока он не будет активирован для всех низкоприоритетных режимов и/или запрашиваемый режим будет принимать всю энергию, которую он запросил, или его запрос более не будет является действительным. Один способ, согласно которому пошаговые уменьшения могут и не быть возможны, состоит в том, что запрашиваемый режим не выполнен с возможностью работы только с добавленным количеством энергии, обеспеченным путем указанных пошаговых уменьшений.
На фиг. 18 показана иллюстративная компьютерная архитектура, предназначенная для компьютера 1800, размещенного в воздушном летательном аппарате 1801, и выполненная с возможностью осуществления компонент программного обеспечения, описанных в настоящей заявке, для выдачи энергии на группу двигателей 108 вышеописанным образом. Компьютерная архитектура, показанная на фиг. 18, иллюстрирует обычный настольный персональный компьютер, ноутбук или серверный компьютер и может быть использована для выполнения любых аспектов способов, приведенных в настоящей заявке. Как описано выше, компьютер 1800 может представлять собой часть схемы 202 переключения питания или может быть связан с возможностью обмена данными со схемой 202 переключения питания. Несмотря на то, что предпочтительный вариант реализации размещен в воздушном летательном аппарате, иллюстративные варианты реализации в пределах объема настоящего изобретения могут быть реализованы на системах, содержащихся в реактивном воздушном летательном аппарате, пропеллерном воздушном летательном аппарате, вертолете, транспортном средстве на воздушной подушке, наземном транспортном средстве, морском транспортном средстве или на любой другой системе, независимо управляющей группами из устройств управления двигателями и двигателей.
Компьютерная архитектура, показанная на фиг. 18, содержит центральный блок 1802 обработки данных (CPU), память 1808 системы, содержащую оперативное запоминающее устройство 1814 (RAM) и постоянное запоминающее устройство (ROM) 1816, а также системную шину 1804, которая соединяет указанную память с центральным блоком 1802 обработки данных (CPU). Основная система ввода-вывода, содержащая основные процедуры, которые помогают в передаче информации между элементами в компьютере 1800, например во время запуска, хранится в постоянном запоминающем устройстве 1816 (ROM). Компьютер 1800 дополнительно содержит запоминающее устройство 1810 большой емкости для хранения операционной системы 1818, программы приложений и другие программные модули, которые описаны более подробно в настоящей заявке.
Запоминающее устройство 1810 большой емкости соединено с центральным блоком 1802 обработки данных (CPU) посредством устройства управления запоминающими устройствами (не показано), соединенного с шиной 1804. Запоминающее устройство 1810 большой емкости и связанный с ним машиночитаемый носитель данных обеспечивают наличие энергонезависимого запоминающего устройства для компьютера 1800. Несмотря на то, что описание машиночитаемого носителя данных, содержащееся в настоящей заявке, относится к запоминающему устройству большой емкости, такому как жесткий диск или привод для постоянных запоминающих устройств на компакт-дисках (CD-ROM), специалистам в области техники должно быть понятно, что компьютерный носитель данных может представлять собой любой имеющийся на рынке компьютерный носитель данных для хранения данных, который может быть доступен для компьютера 1800.
В качестве примера, а не ограничения, компьютерный носитель данных может содержать энергозависимый и энергонезависимой, извлекаемый и неизвлекаемый носитель данных, реализованный в любом способе или технологии для хранения информации, такой как машиночитаемые инструкции, структуры данных, программные модули или другие данные. Например, компьютерный носитель данных содержат, однако не ограничен, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), стираемое программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), флэш-память или другую технологию твердотельной памяти, постоянное запоминающее устройство на компакт-дисках (CD-ROM), универсальные цифровые диски (DVD), универсальные цифровые диски для хранения данных высокого разрешения (HD-DVD), диск типа «BLU-RAY» или другое оптическое запоминающее устройство, магнитные кассеты, магнитная лента, запоминающее устройство на магнитных дисках или другие магнитные запоминающие устройства, или любой другой носитель данных, который может быть использован для хранения необходимой информации и который может быть доступен компьютеру 1800.
В соответствии с различными вариантами реализации компьютер 1800 может работать в сетевой среде с использованием логических соединений с удаленными компьютерами посредством сети, такой как сеть 1822. Компьютер 1800 может соединяться с сетью 1822 посредством блока 1806 сетевого интерфейса, соединенного с шиной 1804. Следует принимать во внимание, что блок 1806 сетевого интерфейса может также быть использован для соединения с другими типами сетей и удаленными компьютерными системами. Компьютер 1800 может также содержать устройство 1812 управления вводом-выводом данных для обеспечения приема и обработки входных данных от определенного количества других устройств, включая клавиатуру, манипулятор типа «мышь» или электронное перо (не показаны на фиг. 18). Аналогичным образом, устройство управления вводом-выводом данных может выдавать выходные данные на экран дисплея, принтер или другой тип устройства вывода данных (также не показаны на фиг. 18).
Как вкратце описано выше, определенное количество программных модулей и файлов данных может храниться в запоминающем устройстве 1810 большой емкости и оперативном запоминающем устройстве 1814 (RAM) компьютера 1800, содержащем операционную систему 1818, подходящую для управления работой подключенного к сети настольного персонального компьютера, ноутбука или серверного компьютера. Запоминающее устройство 1810 большой емкости и оперативное запоминающее устройство 1814 (RAM) могут также хранить один или более программных модулей. В частности, запоминающее устройство 1810 большой емкости и оперативное запоминающее устройство 1814 (RAM) могут хранить приложение 1820 для перенастройки устройств управления двигателем, которое выполнено с возможностью выполнения вышеописанных операций. Запоминающее устройство 1810 большой емкости и оперативное запоминающее устройство 1814 (RAM) могут также хранить другие типы программных модулей.
Кроме того, настоящее изобретения содержит варианты реализации согласно приведенным далее пунктам:
Пункт 1. Способ управления мощностью в реальном времени в отношении множества устройств управления двигателем посредством по меньшей мере одного обрабатывающего устройства на компьютерной системе, согласно которому:
определяют первую потребность в силовой нагрузке из первого множества активных двигателей, причем первое множество активных двигателей представляет собой подсовокупность множества двигателей,
выбирают первую комбинацию устройств управления двигателем из множества устройств управления двигателем, необходимых для обеспечения мощности, достаточной для соответствия первой потребности в силовой нагрузке, по меньшей мере частично на основании максимальной выходной мощности множества устройств управления двигателем,
назначают первую совокупность общесистемных приоритетов по меньшей мере частично на основании максимальной выходной мощности и первой потребности в силовой нагрузке,
настраивают схему переключения питания таким образом, что указанное первое множество активных двигателей электрически соединены с первой комбинацией устройств управления двигателем согласно указанной первой совокупности общесистемных приоритетов,
принимают запрос мощности для первого двигателя от первого блока управления, связанный с первым уровнем приоритета,
определяют назначение первого приоритета для первого уровня приоритета в отношении первой совокупности общесистемных приоритетов,
назначают вторую совокупность общесистемных приоритетов по меньшей мере частично на основании назначения первого приоритета и первой совокупности общесистемных приоритетов,
определяют вторую потребность в силовой нагрузке из второго множества активных двигателей, которое содержит указанное первое множество активных двигателей и первый двигатель,
выбирают вторую комбинацию устройств управления двигателем из указанного множества устройств управления двигателем, необходимую для обеспечения мощности, достаточной для соответствия второй потребности в силовой нагрузке, и
настраивают схему переключения питания таким образом, что указанное второе множество активных двигателей электрически соединены со второй комбинацией устройств управления двигателем согласно второй совокупности общесистемных приоритетов.
Пункт 2. Способ по пункту 1, согласно которому дополнительно:
принимают первый сигнал от второго блока управления, причем первый сигнал связан с запросом мощности, и
регулируют назначение первого приоритета на основании первого сигнала и, таким образом, регулируют указанную вторую совокупность общесистемных приоритетов.
Пункт 3. Способ по пункту 2, согласно которому дополнительно:
определяют, что вторая потребность в силовой нагрузке больше максимальной выходной мощности указанного множества устройств управления двигателем, и
отсоединяют подсовокупность низкоприоритетных активных двигателей.
Пункт 4. Способ по пункту 2, согласно которому дополнительно:
определяют, что вторая потребность в силовой нагрузке больше максимальной выходной мощности указанного множества устройств управления двигателем, и
настраивают схему переключения питания таким образом, что вторая комбинация устройств управления двигателем подает определенное количество энергии на подсовокупность низкоприоритетных активных двигателей, которое уменьшено до значения менее оптимального рабочего количества энергии для указанной подсовокупности низкоприоритетных активных двигателей согласно второй совокупности общесистемных приоритетов.
Пункт 5. Способ по пункту 4, согласно которому дополнительно:
идентифицируют то, что запрос энергии более не является действительным,
повторно назначают первую совокупность общесистемных приоритетов, и
настраивают схему переключения питания таким образом, что количество энергии, поданной на подсовокупность низкоприоритетных активных двигателей увеличивают обратно до оптимального рабочего значения энергии для указанной подсовокупности низкоприоритетных активных двигателей согласно указанной первой совокупности общесистемных приоритетов.
Пункт 6. Способ по пункту 2, согласно которому дополнительно:
определяют, что максимальная выходная мощность указанного множества устройств управления двигателем была уменьшена до меньшей максимальной выходной мощности, и
отсоединяют подсовокупность низкоприоритетных активных двигателей.
Пункт 7. Способ по пункту 2, согласно которому дополнительно:
определяют, что максимальная выходная мощность указанного множества устройств управления двигателем была уменьшена до меньшей максимальной выходной мощности, и
настраивают схему переключения питания таким образом, что количество энергии, поданной на подсовокупность низкоприоритетных активных двигателей, уменьшают до значения менее оптимального рабочего уровня для указанной подсовокупности низкоприоритетных активных двигателей согласно второй совокупности общесистемных приоритетов.
Пункт 8. Способ по пункту 1, согласно которому первый блок управления представляет собой блок управления питанием шины.
Пункт 9. Способ по пункту 1, согласно которому каждый из указанного множества двигателей может быть выбран из группы, содержащей: электрический запуск основного двигателя, стартер, генератор, электронное устройство управления двигателем, устройство управления вспомогательным блоком питания, электрический запуск вспомогательного двигателя, вспомогательный стартер-генератор, блок управления электрическим запуском батарейного вспомогательного двигателя, двигатель для электрического руления, кабинный воздушный компрессор, гидравлический насос, двигатель для создания азота, вентилятор системы управления условиями окружающей среды и двигатель для охлаждения груза.
Пункт 10. Способ по пункту 2, согласно которому второй блок управления выбран из группы, содержащей: блок управления генератором, электронное устройство управления двигателем, устройство управления вспомогательным блоком питания, блок управления вспомогательным генератором, устройство управления для управления блоком увеличения напряжения батареи, устройство управления электрическим рулением, устройство управления электрическим тормозом, блок управления установкой кондиционирования воздуха, устройство управления гидравлическим насосом, устройство управления системой создания азота, устройство управления для управления вентилятором системы управления условиями окружающей среды и устройство управления системой охлаждения груза.
Пункт 11. Система управления двигателем, содержащая:
множество двигателей,
множество устройств управления двигателем, выполненных с возможностью параллельного электрического соединения,
схему переключения питания, электрически соединяющую указанное множество двигателей с указанным множеством устройств управления двигателем, и
параллельный модульный преобразователь для динамического управления схемой переключения питания, содержащий компьютер по меньшей мере с одним обрабатывающим устройством и носителем данных для долговременного хранения данных, имеющим выполняемые компьютером инструкции, которые хранятся на этом компьютере и которые, при их выполнении на компьютере, вызывают то, что указанный компьютер:
определяет первую потребность в силовой нагрузке из первого множества активных двигателей, которое представляет собой подсовокупность указанного множества двигателей,
выбирает первую комбинацию устройств управления двигателем из множества устройств управления двигателем, необходимых для обеспечения мощности, достаточной для согласования с первой потребностью в силовой нагрузке, по меньшей мере частично на основании максимальной выходной мощности указанного множества устройств управления двигателем,
назначает первую совокупность общесистемных приоритетов по меньшей мере частично на основании максимальной выходной мощности и первой потребности в силовой нагрузке,
настраивает схему переключения питания таким образом, что указанное первое множество активных двигателей электрически соединены с первой комбинацией устройств управления двигателем согласно первой совокупности общесистемных приоритетов,
принимает запрос мощности для первого двигателя от первого блока управления, связанный с первым уровнем приоритета,
определяет назначение первого приоритета для первого уровня приоритета в отношении указанной первой совокупности общесистемных приоритетов,
назначает вторую совокупность общесистемных приоритетов по меньшей мере частично на основании назначения первого приоритета и указанной первой совокупности общесистемных приоритетов,
определяет вторую потребность в силовой нагрузке из второго множества активных двигателей, которое содержит указанное первое множество активных двигателей и первый двигатель,
выбирает вторую комбинацию устройств управления двигателем из указанного множества устройств управления двигателем, необходимую для обеспечения мощности, достаточной для согласования со второй потребностью в силовой нагрузке, и
настраивает схему переключения питания таким образом, что указанное второе множество активных двигателей электрически соединены со второй комбинацией устройств управления двигателем согласно второй совокупности общесистемных приоритетов.
Пункт 12. Система по пункту 11, в которой выполняемые компьютером инструкции, хранящиеся на этом компьютере, дополнительно вызывают то, что указанный компьютер:
принимает первый сигнал от второго блока управления, причем первый сигнал связан с запросом мощности, и
регулирует назначение первого приоритета на основании первого сигнала и, таким образом, регулирует указанную вторую совокупность общесистемных приоритетов.
Пункт 13. Система по пункту 12, причем выполняемые компьютером инструкции, хранящиеся на этом компьютере, дополнительно вызывают то, что указанный компьютер:
определяет, что вторая потребность в силовой нагрузке больше значения максимальной выходной мощности указанного множества устройств управления двигателем, и
отсоединяет подсовокупность низкоприоритетных активных двигателей.
Пункт 14. Система по пункту 12, в которой выполняемые компьютером инструкции, хранящиеся на этом компьютере, дополнительно вызывают то, что указанный компьютер:
определяет, что вторая потребность в силовой нагрузке больше значения максимальной выходной мощности указанного множества устройств управления двигателем, и
настраивает схему переключения питания таким образом, что вторая комбинация устройств управления двигателем подает определенное количество энергии на подсовокупность низкоприоритетных активных двигателей, которое уменьшено до значения менее оптимального рабочего количества энергии для указанной подсовокупности низкоприоритетных активных двигателей согласно указанной второй совокупности общесистемных приоритетов.
Пункт 15. Система по пункту 14, в которой выполняемые компьютером инструкции, хранящиеся на этом компьютере, дополнительно вызывают то, что указанный компьютер:
идентифицирует, что запрос мощности более не является действительным,
повторно назначает указанную первую совокупность общесистемных приоритетов, и
настраивает схему переключения питания таким образом, что количество энергии, поданной на подсовокупность низкоприоритетных активных двигателей, увеличено обратно до оптимального рабочего значения энергии для указанной подсовокупности низкоприоритетных активных двигателей согласно первой совокупности общесистемных приоритетов.
Пункт 16. Система по пункту 12, в которой выполняемые компьютером инструкции, хранящиеся на этом компьютере, дополнительно вызывают то, что указанный компьютер:
определяет то, что максимальная выходная мощность указанного множества устройств управления двигателем была уменьшена до значения меньшей максимальной выходной мощности, и
отсоединяет подсовокупность низкоприоритетных активный двигателей.
Пункт 17. Система по пункту 12, в которой выполняемые компьютером инструкции, хранящиеся на этом компьютере, дополнительно вызывают то, что указанный компьютер:
определяет то, что максимальная выходная мощность указанного множества устройств управления двигателем была уменьшена до значения меньшей максимальной выходной мощности, и
настраивает схему переключения питания таким образом, что количество энергии, поданной на подсовокупность низкоприоритетных активных двигателей, уменьшено до значения менее оптимального рабочего уровня для указанной подсовокупности низкоприоритетных активных двигателей согласно указанной второй совокупности общесистемных приоритетов.
Пункт 18. Система по пункту 11, в которой каждый из указанного множества двигателей может быть выбран из группы, содержащей: электрический запуск основного двигателя, стартер, генератор, электронное устройство управления двигателем, устройство управления вспомогательным блоком питания, электрический запуск вспомогательного двигателя, вспомогательный стартер-генератор, блок управления электрическим запуском батарейного вспомогательного двигателя, двигатель для электрического руления, кабинный воздушный компрессор, гидравлический насос, двигатель для создания азота, вентилятор системы управления условиями окружающей среды и двигатель для охлаждения груза.
Пункт 19. Система по пункту 12, в которой второй блок управления выбран из группы, содержащей: блок управления генератором, электронное устройство управления двигателем, устройство управления вспомогательным блоком питания, блок управления вспомогательным генератором, устройство управления для управления блоком увеличения напряжения батареи, устройство управления электрическим рулением, устройство управления электрическим тормозом, блок управления установкой кондиционирования воздуха, устройство управления гидравлическим насосом, устройство управления системой создания азота, устройство управления для управления вентилятором системы управления условиями окружающей среды и устройство управления системой охлаждения груза.
Пункт 20. Воздушный летательный аппарат с системой управления двигателем, содержащий:
множество двигателей,
множество устройств управления двигателем, выполненных с возможностью параллельного электрического соединения,
схему переключения питания, электрически соединяющая указанное множество двигателей с указанным множеством устройств управления двигателем, и
параллельный модульный преобразователь для динамического управления схемой переключения питания, содержащий компьютер по меньшей мере с одним обрабатывающим устройством и носителем данных для долговременного хранения данных, имеющим выполняемые компьютером инструкции, которые хранятся на этом компьютере и которые, при их выполнении на компьютере, вызывают то, что указанный компьютер:
принимает сообщение, содержащее запрашиваемый режим и количество энергии для запрашиваемого режима,
рассчитывает максимальную нагрузочную способность по мощности по меньшей мере частично на основании общего количества устройств управления двигателем и значения мощности, связанного с каждым устройством управления двигателем,
рассчитывает текущее потребление мощности по меньшей мере частично на основании того, какие режимы являются активными в текущий момент времени и того, какая мощность потребляется в результате этих активных режимов,
определяет текущую нагрузочную способность по мощности, которая в текущий момент времени доступна для использования, путем вычисления разности между максимальной нагрузочной способностью по мощности и текущим потреблением мощности,
активирует запрашиваемый режим и уменьшать текущую нагрузочную способность по мощности для учета активности запрашиваемого режима, только если текущая нагрузочная способность по мощности не меньше количества энергии для запрашиваемого режима, однако если текущая нагрузочная способность по мощности меньше количества энергии для запрашиваемого режима, то затем
определяет назначение приоритета для запрашиваемого режима по отношению ко всем другим активным режимам,
активирует запрашиваемый режим только при текущей нагрузочной способности по мощности и затем уменьшает текущую нагрузочную способность по мощности для учета активности запрашиваемого режима, только если приоритет запрашиваемого режима ниже приоритета всех других активных режимов или равен ему, однако если приоритет запрашиваемого режима не меньше приоритета всех других активных в текущий момент времени режимов или равен ему, то затем
определяет, существуют ли какие-либо низкоприоритетные режимы, имеющие назначение приоритета, которое ниже только назначения приоритета запрашиваемого режима, и, если какие-либо низкоприоритетные режимы существуют, то затем
определяет, представляют ли собой только низкоприоритетные режимы, которые существуют, режимы с первым наименьшим приоритетом, имеющие назначение приоритета, которое только на один уровень ниже назначения приоритета запрашиваемого режима, а если существуют какие-либо режимы с первым наименьшим приоритетом, то затем
определяет общую энергию режимов с первым наименьшим приоритетом, которая используется в текущий момент времени этими режимами с первым наименьшим приоритетом, затем
частично уменьшает общую энергию режимов с первым наименьшим приоритетом, направляет эту частично уменьшенную энергию на запрашиваемый режим и устанавливает текущую нагрузочную способность по мощности в ноль, только если возможно осуществить частичное уменьшение общей энергии режимов с первым наименьшим приоритетом, а если не возможно осуществить частичное уменьшение общей энергии режимов с первым наименьшим приоритетом, то затем
полностью уменьшает общую энергию режимов с первым наименьшим приоритетом, направляет эту полностью уменьшенную энергию на запрашиваемый режим и устанавливает текущую нагрузочную способность по мощности в ноль,
определяет, существуют ли режимы со вторым наименьшим приоритетом, имеющие назначение приоритета между уровнем назначения режимов с первым наименьшим приоритетом и уровнем назначения приоритета запрашиваемого режима, а если существуют какие-либо режимы со вторым наименьшим приоритетом, то затем
частично уменьшает общую энергию режимов с первым наименьшим приоритетом, направляет эту частично уменьшенную энергию на запрашиваемый режим, только если возможно осуществить частичное уменьшение общей энергии режимов с первым наименьшим приоритетом, а если невозможно осуществить частичное уменьшение общей энергии режимов с первым наименьшим приоритетом, то затем
полностью уменьшает общую энергию режимов с первым наименьшим приоритетом,
определяет общую энергию режимов со вторым наименьшим приоритетом, которая используется в текущий момент времени этими режимами со вторым наименьшим приоритетом,
частично уменьшает общую энергию режимов со вторым наименьшим приоритетом, направляет эту частично уменьшенную энергий на запрашиваемый режим, только если возможно осуществить частичное уменьшение общей энергии режимов со вторым наименьшим приоритетом, а если невозможно осуществить частичное уменьшение общей энергии режимов со вторым наименьшим приоритетом, то затем
полностью уменьшает общую энергию режимов с первым наименьшим приоритетом и общую энергию режимов со вторым наименьшим приоритетом, направляет эту объединенную уменьшенную энергию на запрашиваемый режим и устанавливает текущую нагрузочную способность по мощности в ноль.
На основании приведенного выше описания, следует принять во внимание, что в настоящей заявке представлены технологии перенастройки схемы 202 переключения питания для перенаправления энергии от любого количества параллельных устройств 204 управления двигателем на один или более двигателей 108 по мере изменения настоящих требовании 304 к силовой нагрузке двигателей 108. При применении вариантов реализации, описанных в настоящей заявке, определенное количество параллельных устройств 204 управления двигателем, которые обслуживают группу двигателей 108 в воздушном летательном аппарате, транспортном средстве или другой платформе, может увеличиваться или сохраняться тем же самым, что и у обычных систем. Однако, поскольку динамическая перенастройка электрических соединений в схеме 202 переключения питания, соединяющей параллельные устройства 204 управления двигателем с двигателями 108, как описано выше в настоящей заявке, обеспечивает возможность уменьшения допустимой выходной мощности параллельных устройств 204 управления двигателем, при этом может быть уменьшен общий вес системы устройств управления двигателем.
Из приведенного выше описания будет очевидно, что конкретные варианты реализации настоящего изобретения были описаны в настоящей заявке в целях иллюстрации в отношении воздушного летательного аппарата, однако различные модификации могут быть реализованы без выхода за рамки настоящего изобретения. Например, устройства управления двигателем могут иметь большее или меньшее количество режимов по сравнению с определенным количеством фиксированных режимов, описанных в приведенных выше конкретных вариантах реализации. Модели могут соответствовать режимам полета, отличным от вышеописанных режимов. Конкретные варианты реализации были описаны в контексте конкретных систем (например, двигателей гидравлического насоса, систем управления условиями окружающей средой (ECS) и систем для создания азота), однако могут быть применены и к другим системам и/или сочетаниям систем в других вариантах реализации. Аспекты настоящего изобретения, описанные в контексте конкретных вариантов реализации, могут быть объединены или исключены в других вариантах реализации. Например, аспекты функций резервного устройства управления двигателем могут быть обеспечены в комбинации с устройствами управления двигателем, работающими с фиксированным количеством предварительно определенных режимов. Кроме того, несмотря на то, что преимущества, связанные с конкретными вариантами реализации настоящего изобретения, были описаны в контексте этих вариантов реализации, другие варианты реализации могут также демонстрировать такие преимущества, однако не всем вариантам реализации обязательно необходимо демонстрировать такие преимущества с тем, чтобы находиться в пределах объема настоящего изобретения. Соответственно, настоящее изобретение не является ограниченным, за исключением случаев, заданных прилагаемой формулой изобретения.
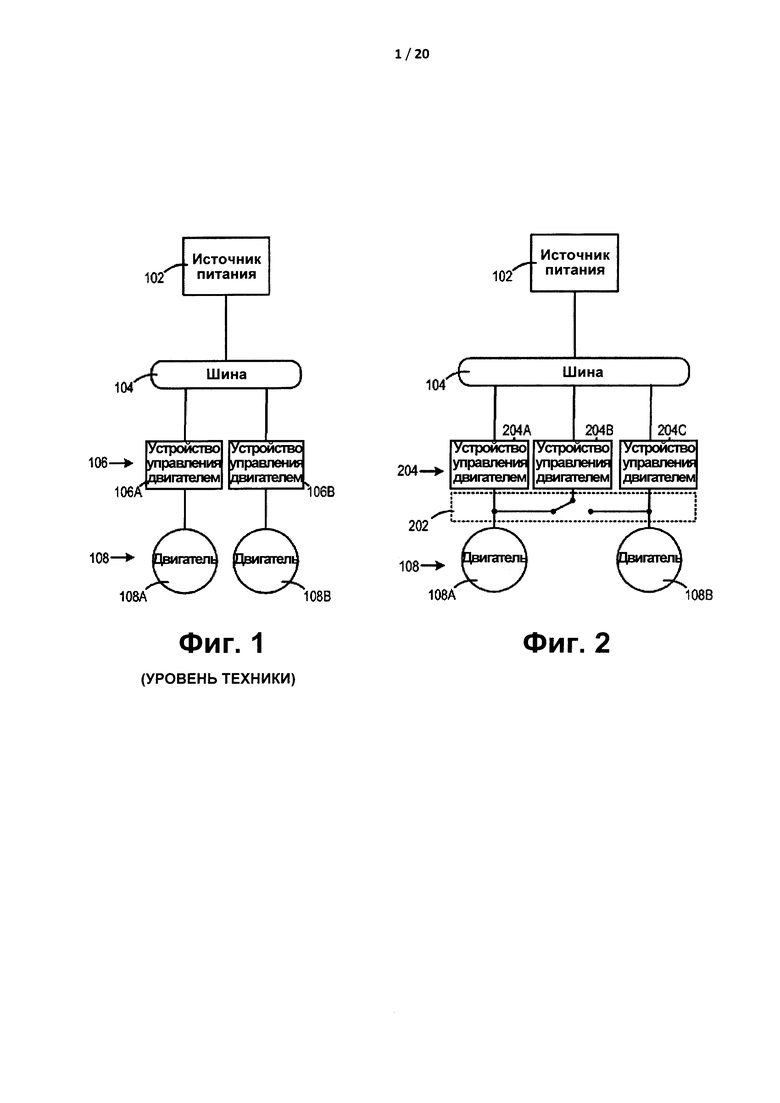

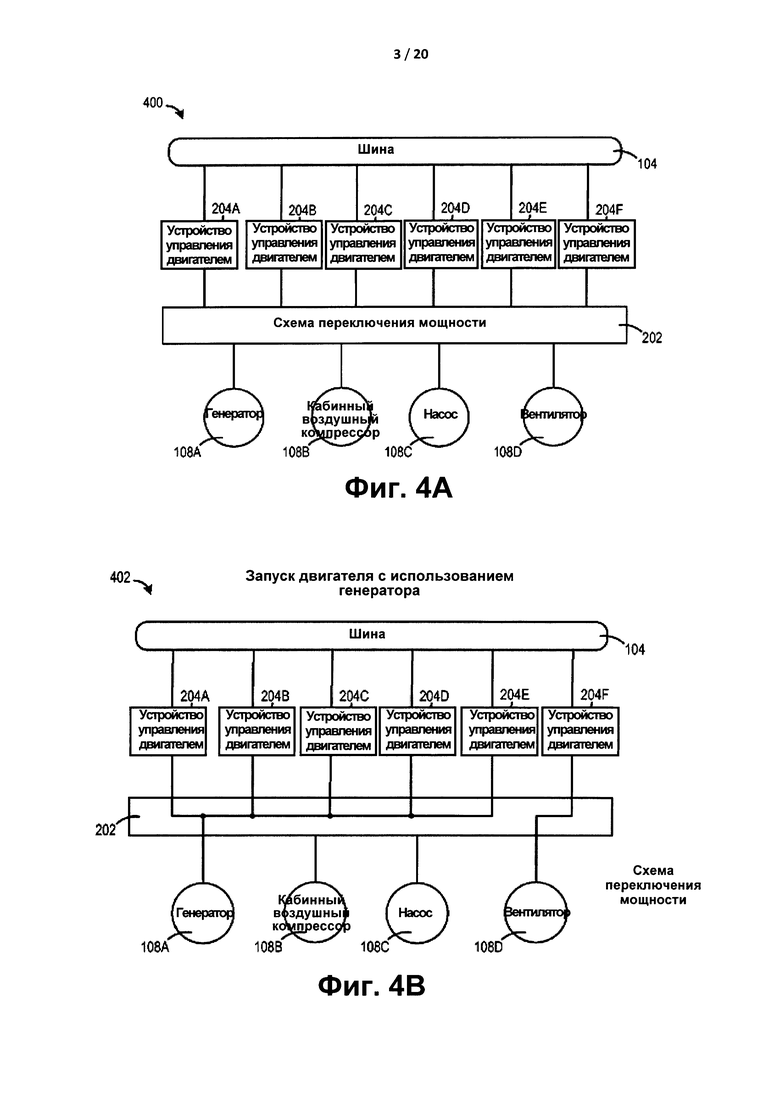
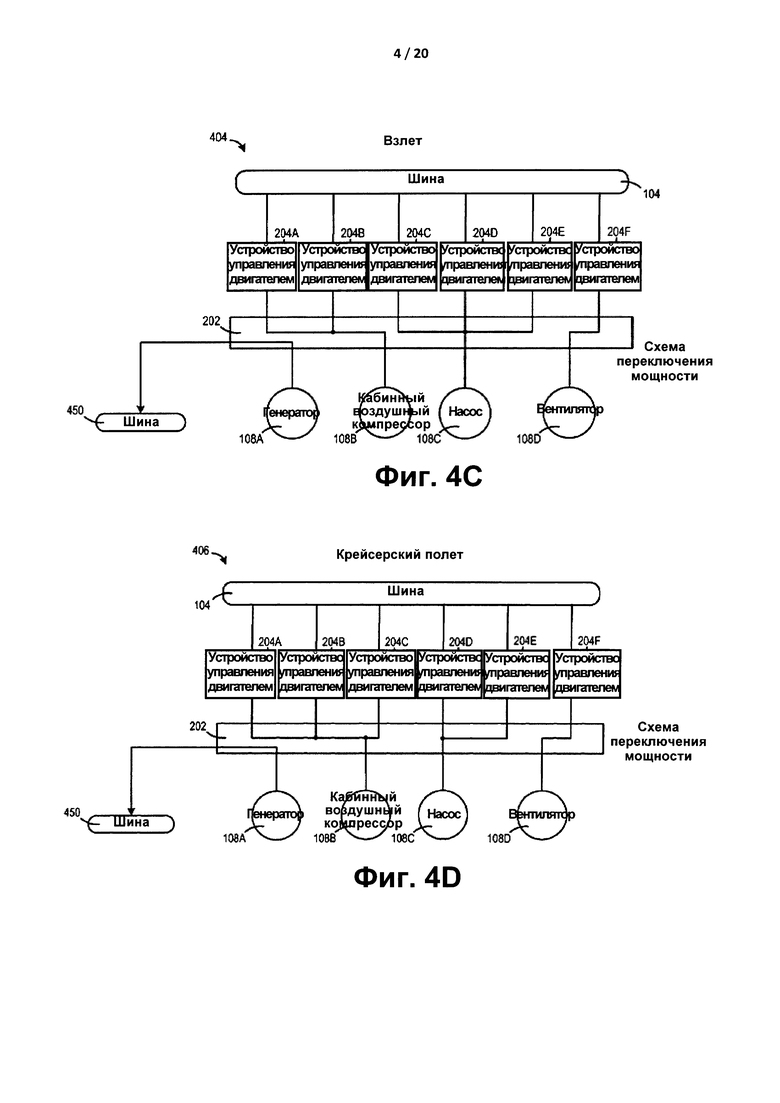
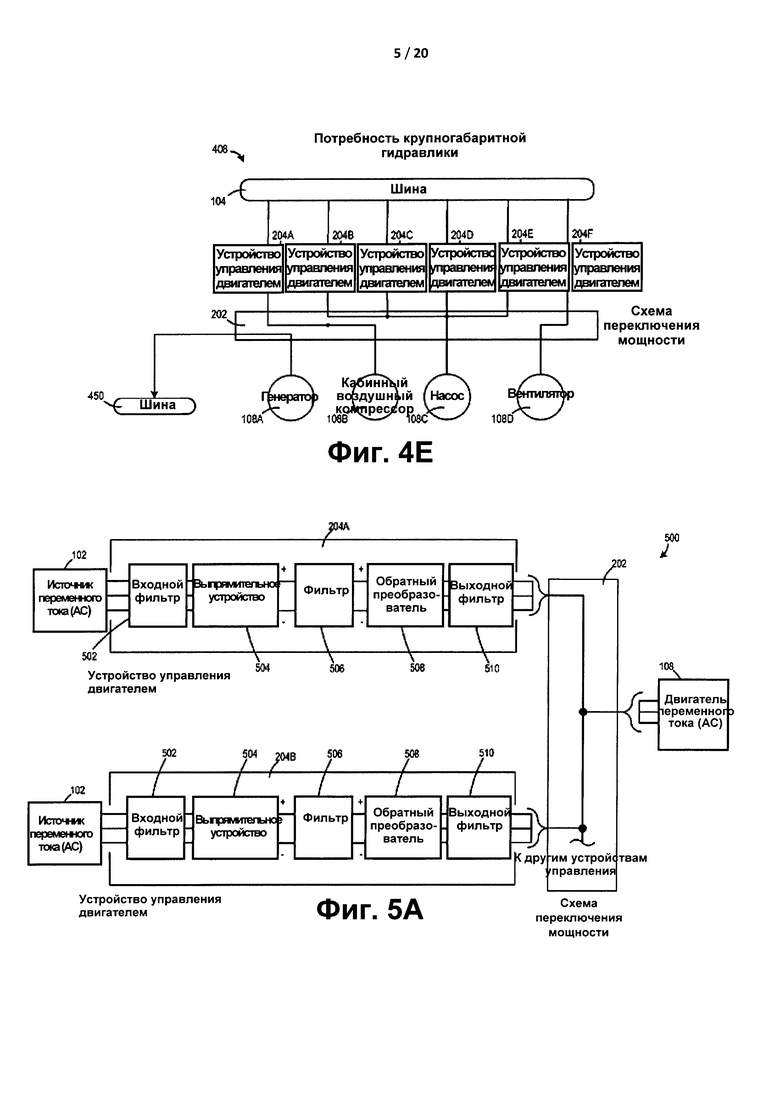
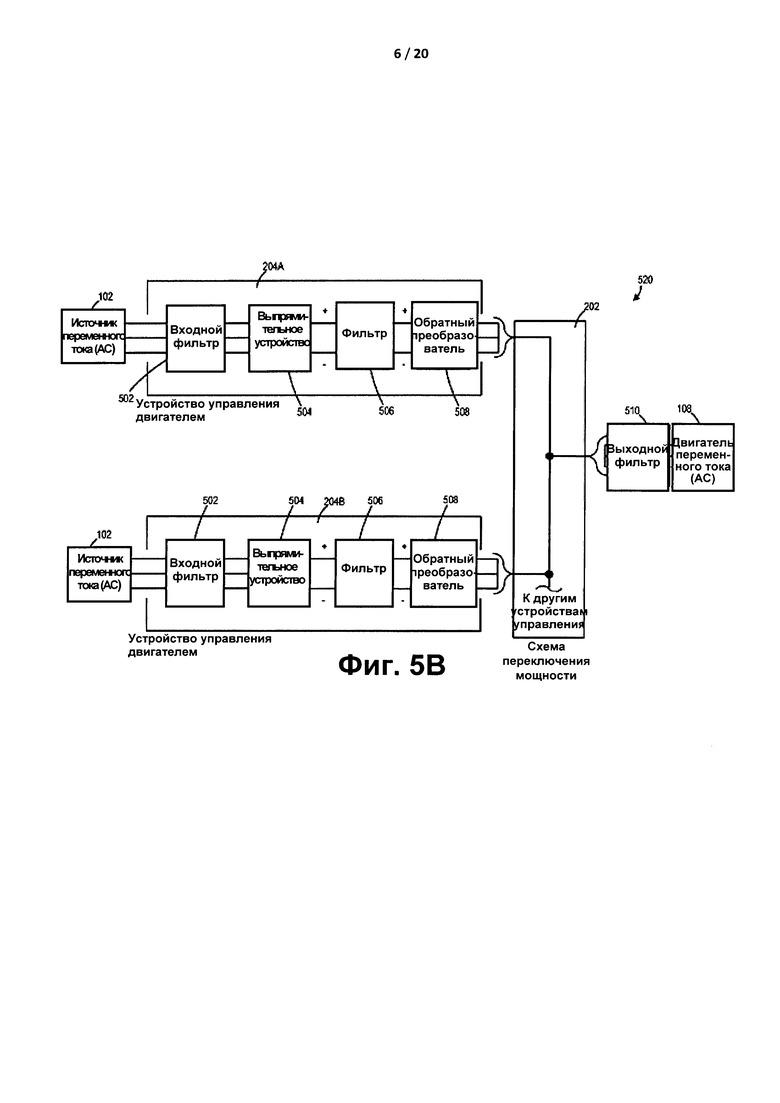
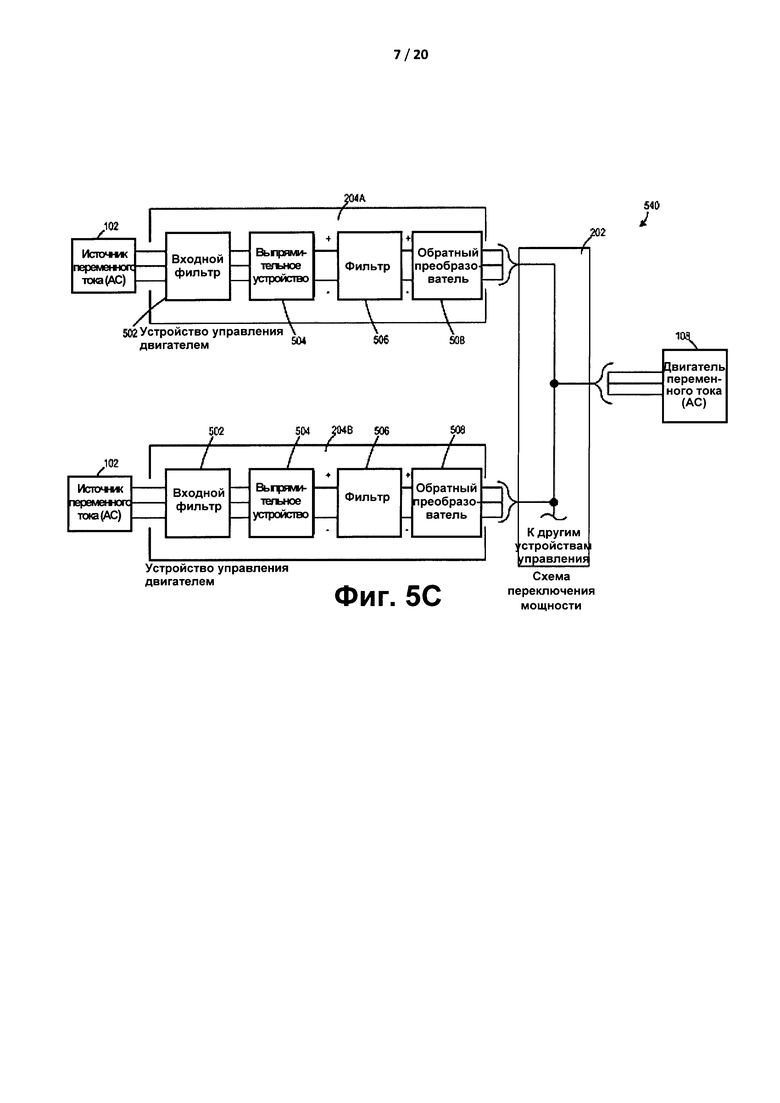
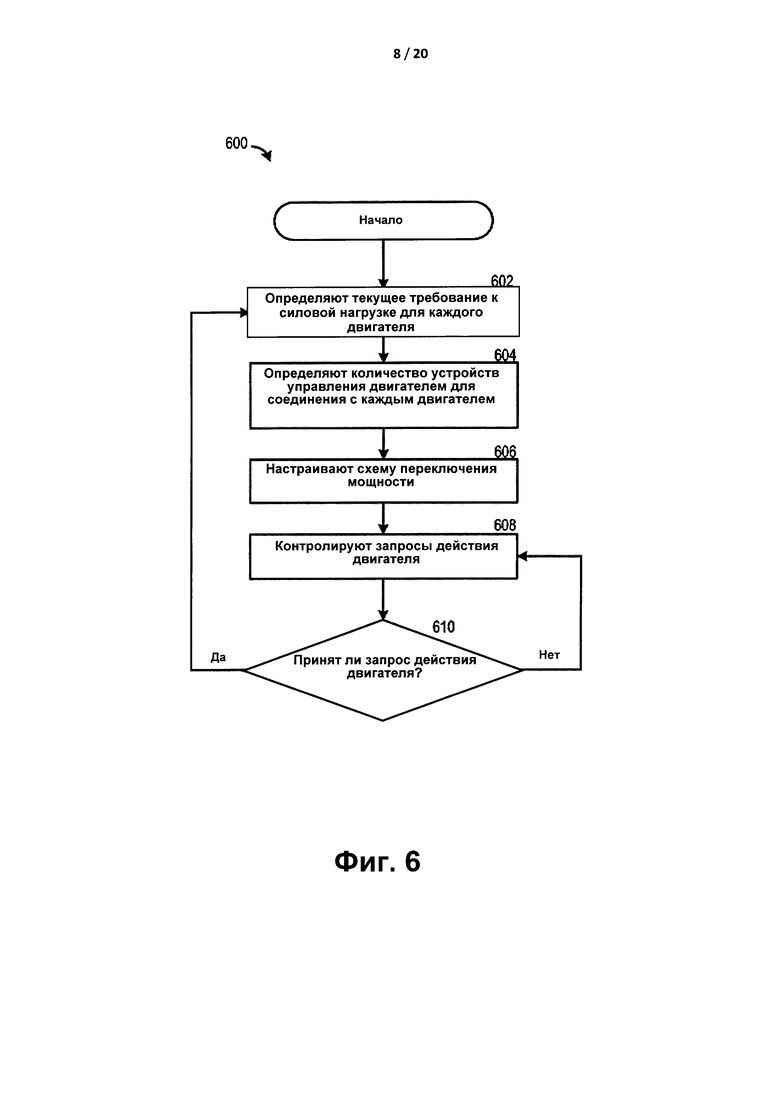
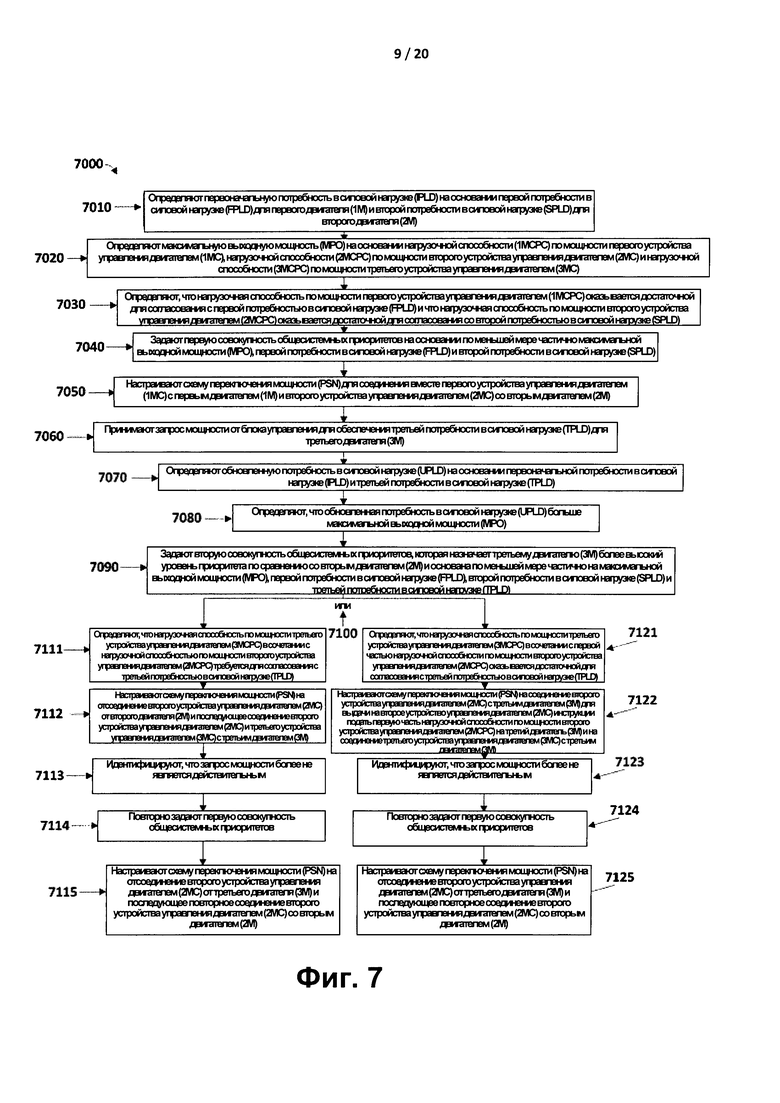
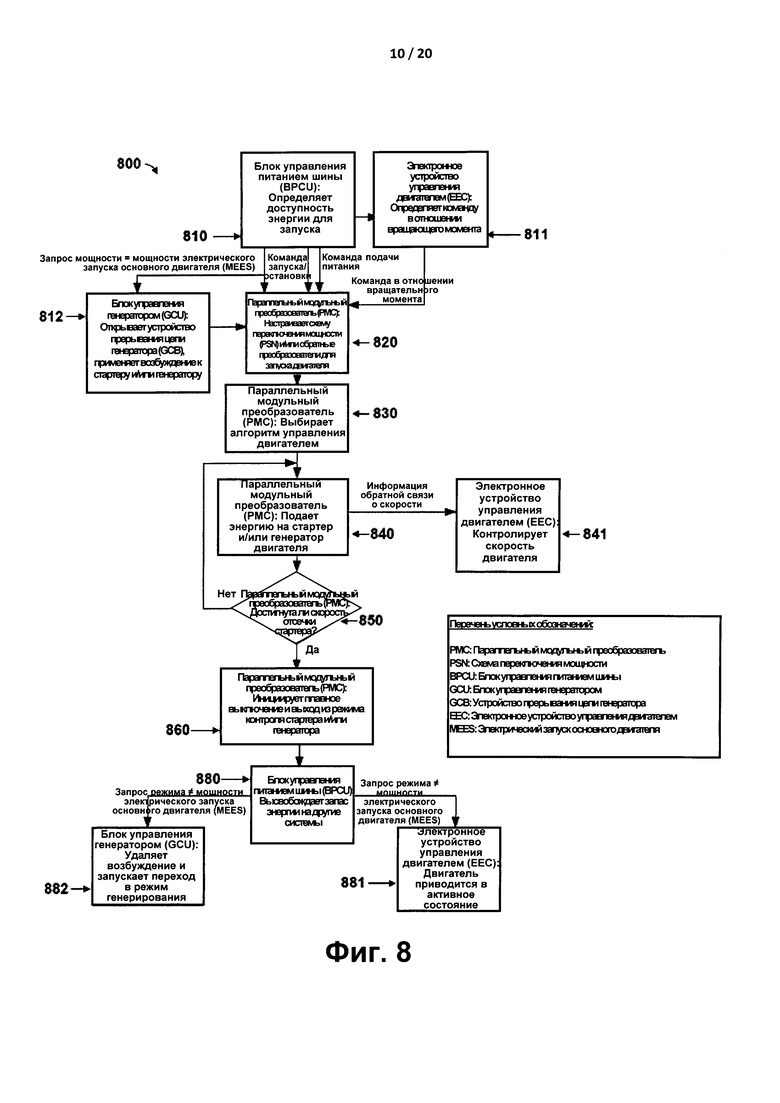
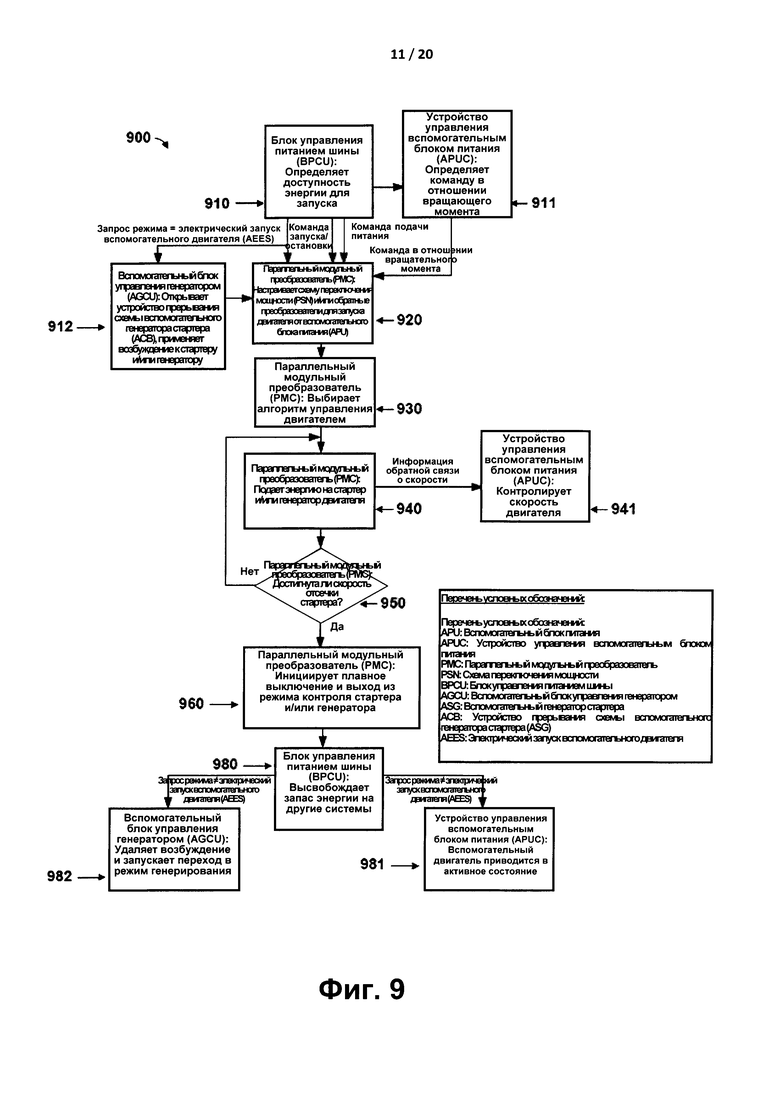
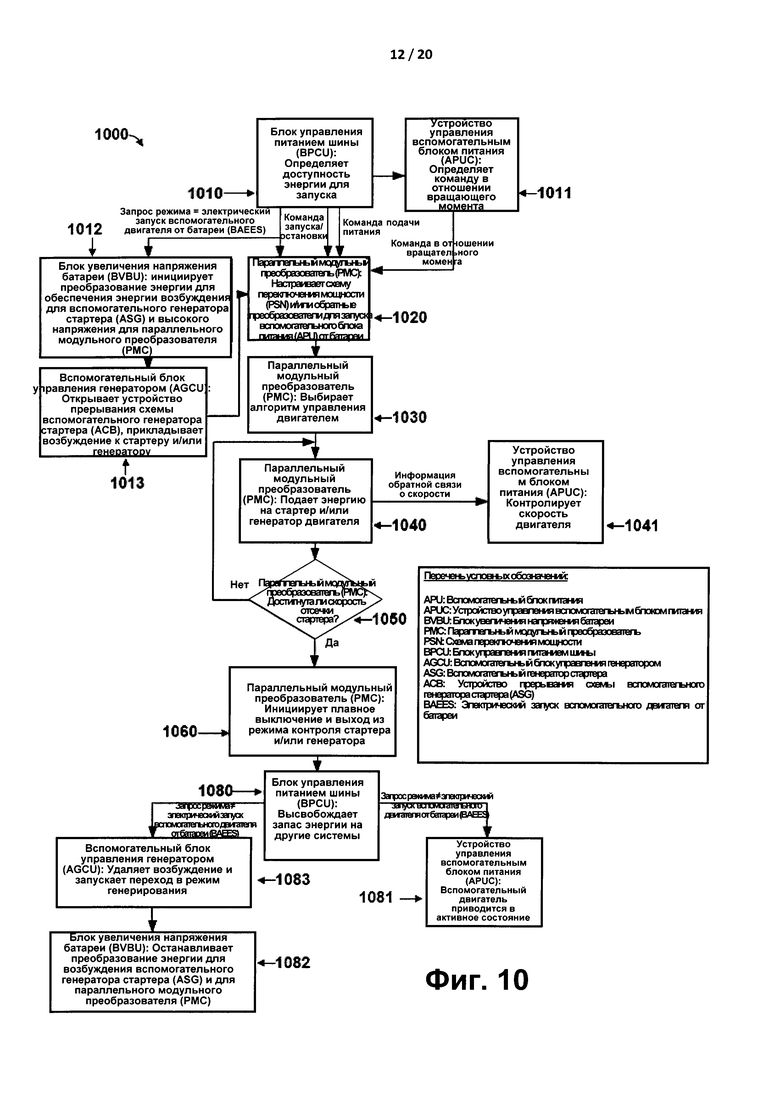
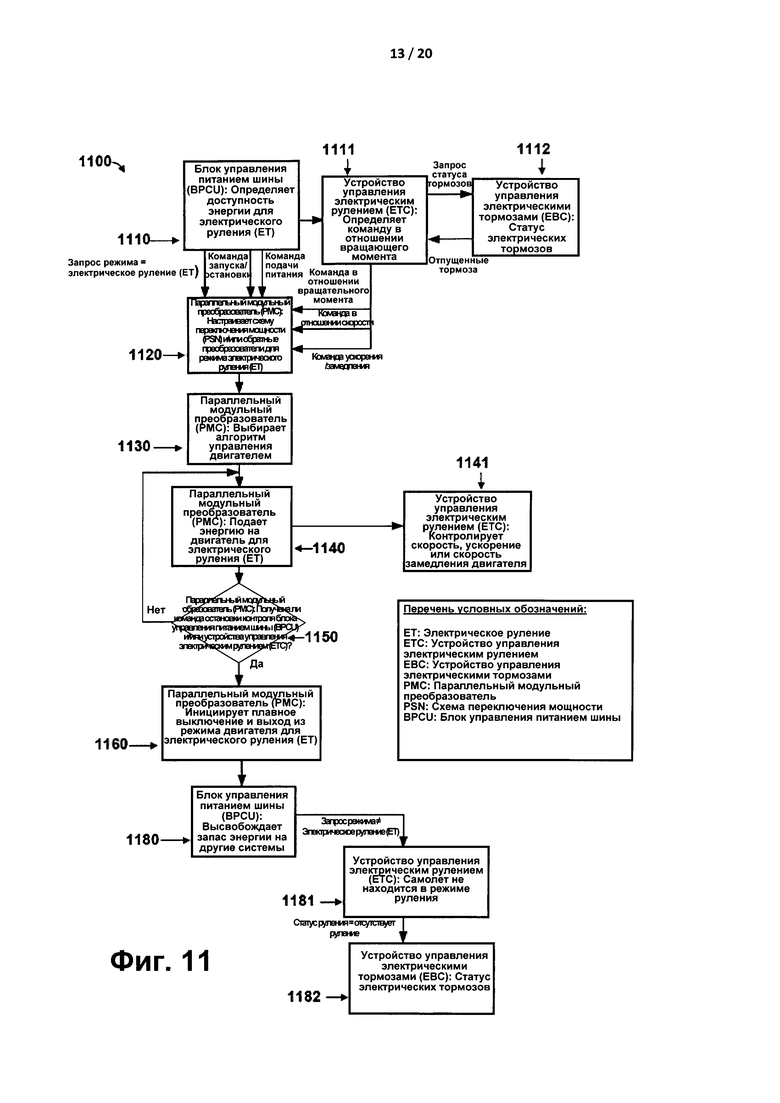
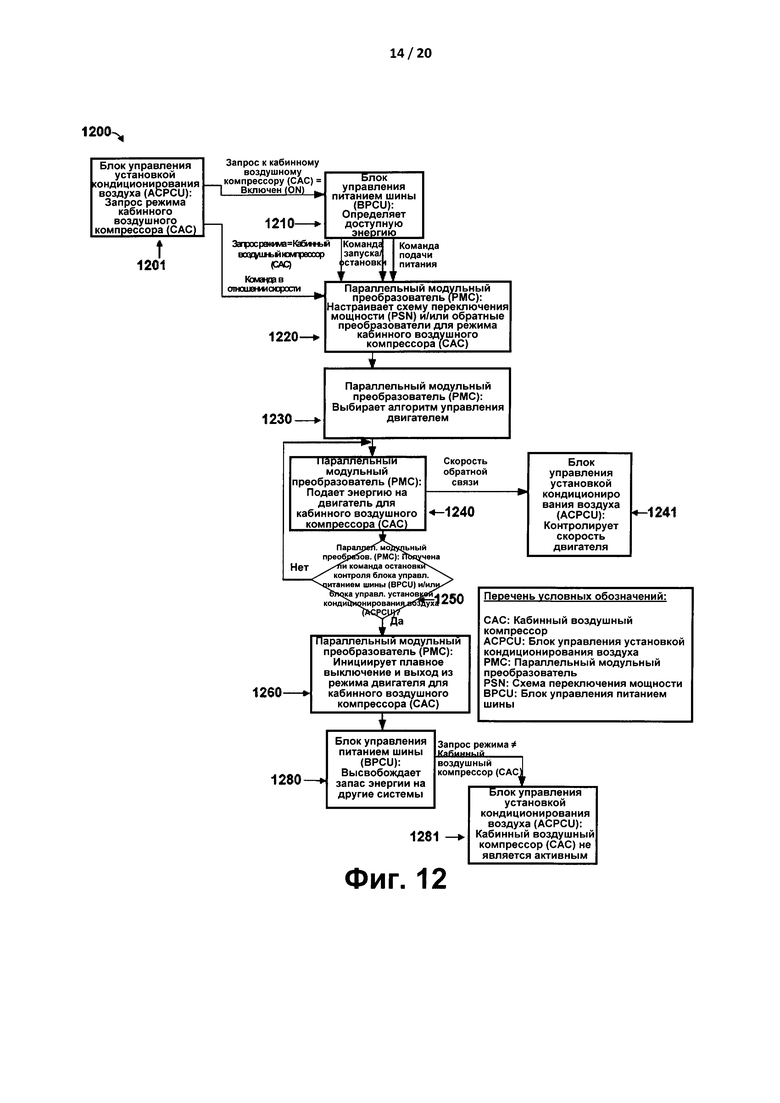
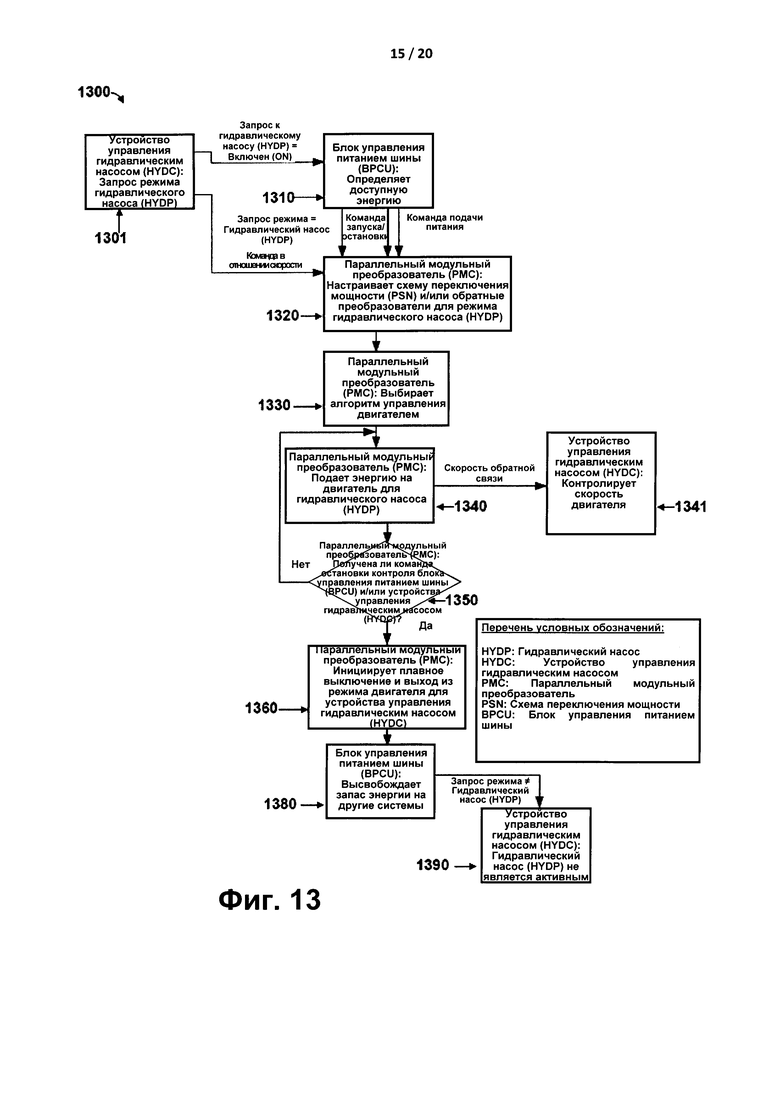
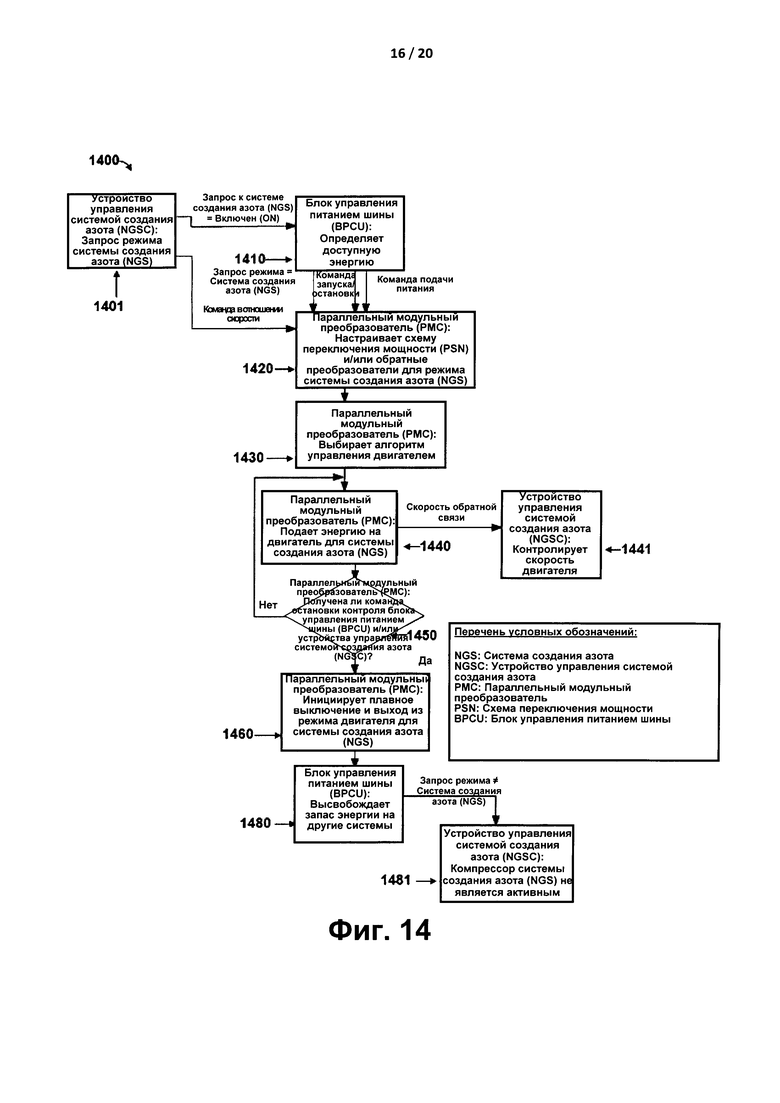
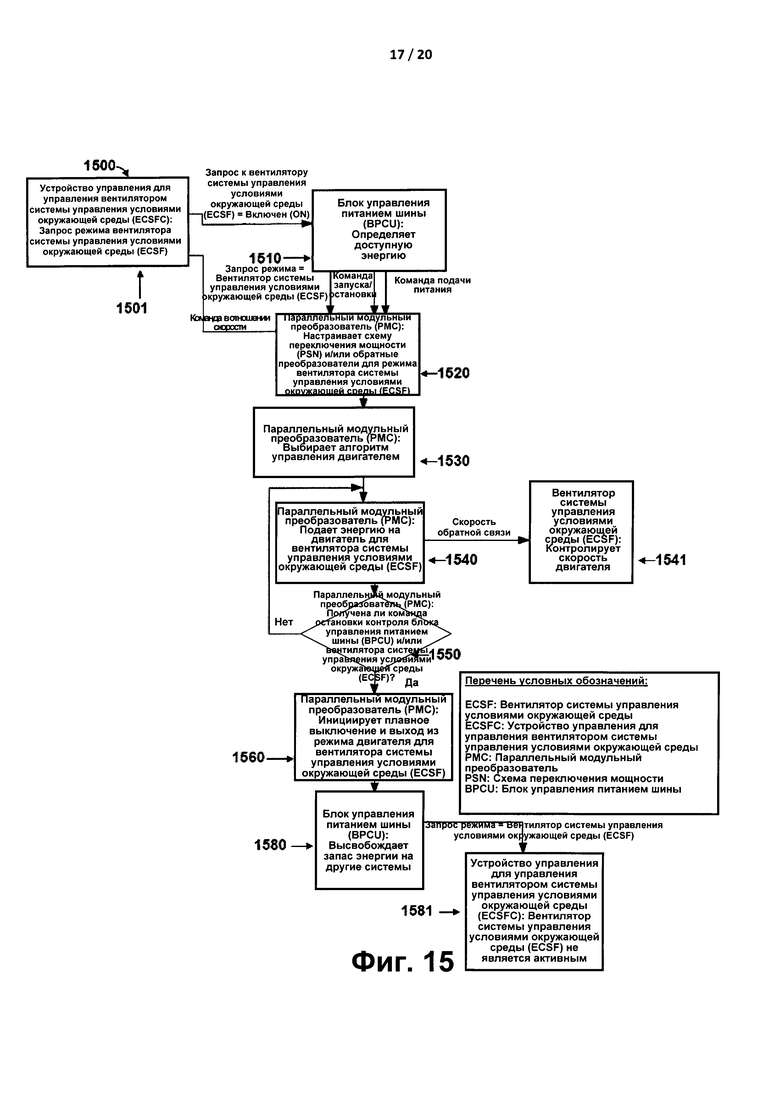
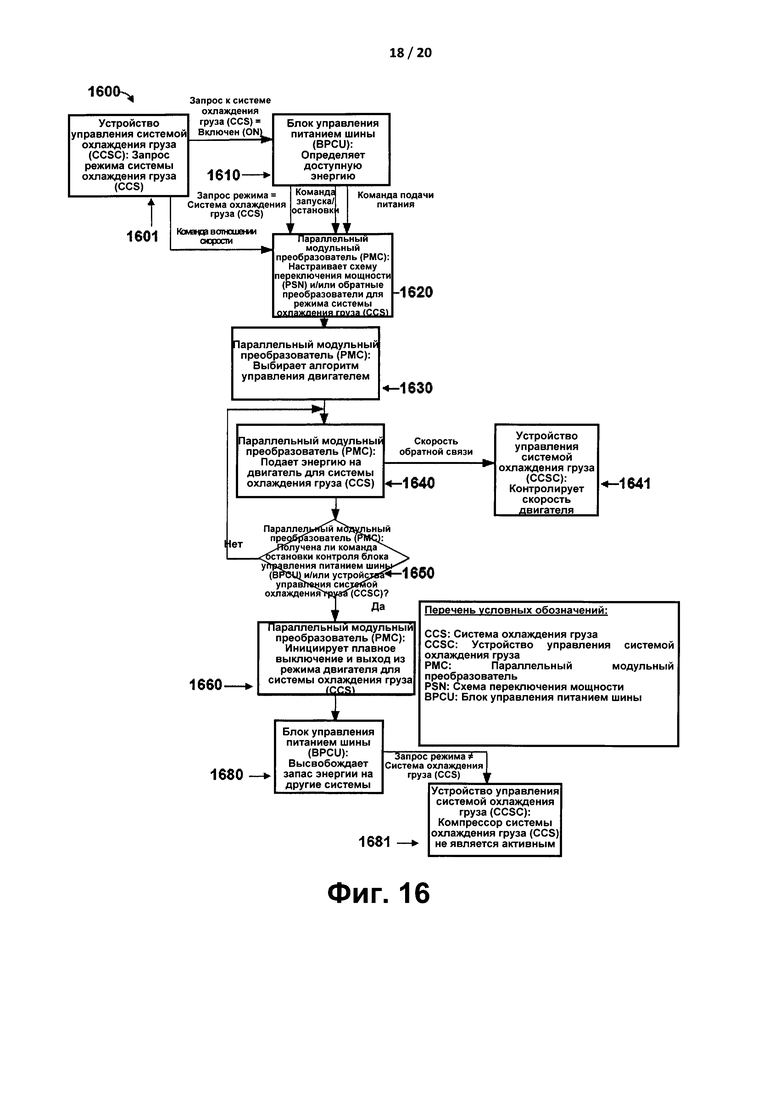
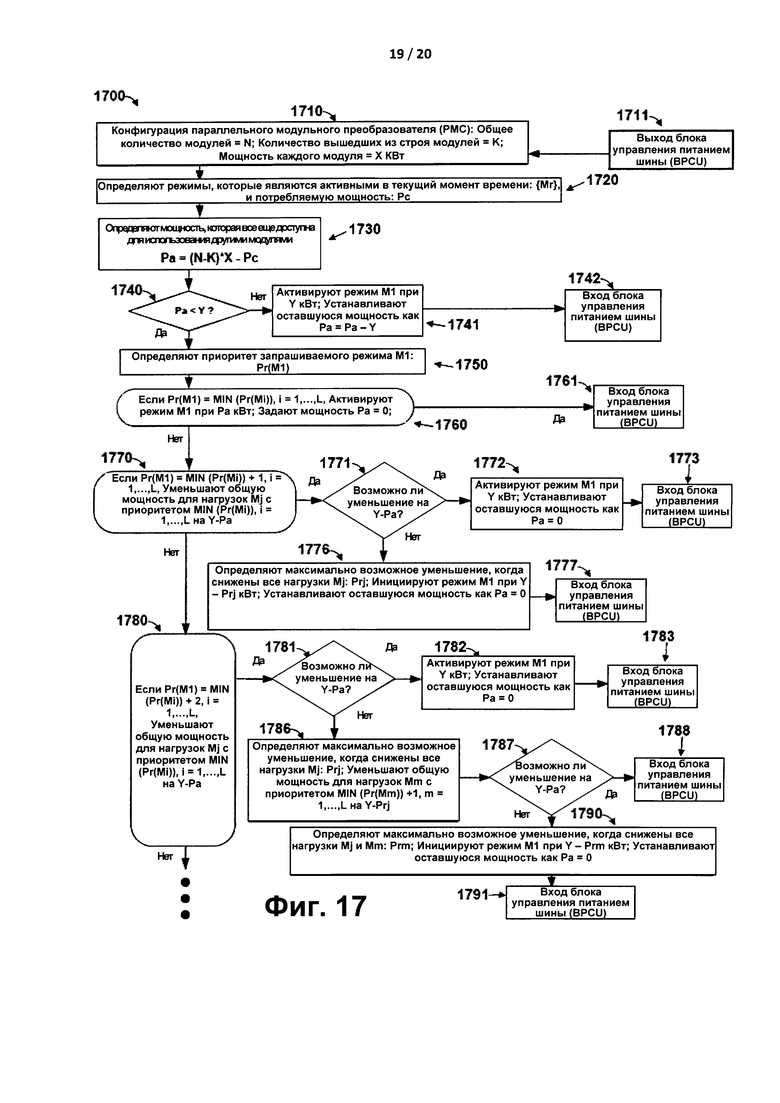
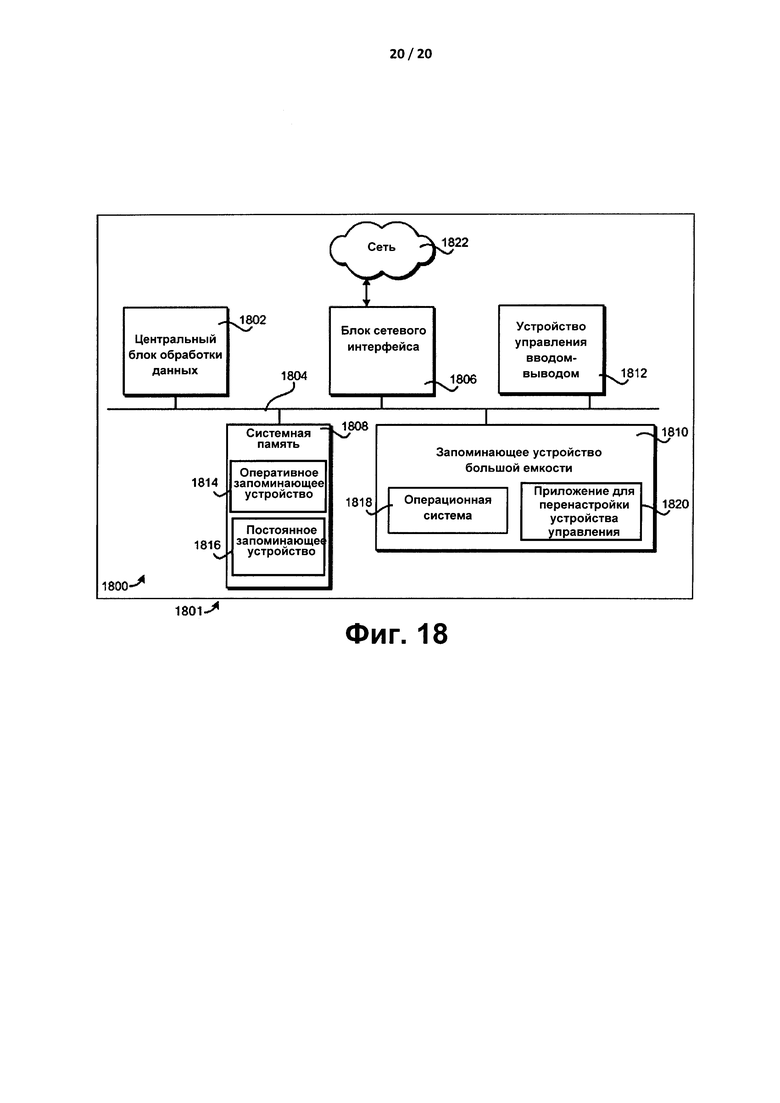
Изобретение относится к системам управления двигателями. Способ управления мощностью в реальном времени в отношении множества устройств управления двигателем посредством по меньшей мере одного обрабатывающего устройства на компьютерной системе включает определение потребности в силовой нагрузке из первой совокупности двигателей, выбор комбинации устройств управления двигателем для согласования с потребностью в силовой нагрузке, задание первой совокупности общесистемных приоритетов, осуществление настройки схемы переключения питания для соединения первой совокупности двигателей с устройствами управления двигателем, прием запроса мощности для двигателя от управляющего блока, определение назначения приоритета для двигателя, назначение второй совокупности общесистемных приоритетов, определение второй потребности в силовой нагрузке из второй совокупности двигателей, причем второе множество активных двигателей содержит первое множество активных двигателей и первый двигатель, выбор второй комбинации устройств управления двигателем, необходимой для согласования со второй потребностью в силовой нагрузке, и осуществление настройки схемы переключения питания согласно указанной второй совокупности общесистемных приоритетов. Изобретение позволяет повысить эффективность управления двигателями. 2 н. и 12 з.п. ф-лы, 18 ил.
1. Способ управления мощностью в реальном времени в отношении множества устройств управления двигателем посредством по меньшей мере одного обрабатывающего устройства на компьютерной системе, согласно которому:
определяют первую потребность в силовой нагрузке из первого множества активных двигателей, которое представляет собой подсовокупность множества двигателей,
выбирают первую комбинацию устройств управления двигателем из указанного множества устройств управления двигателем, необходимую для обеспечения мощности, достаточной для соответствия первой потребности в силовой нагрузке, по меньшей мере частично на основании максимальной выходной мощности указанного множества устройств управления двигателем,
назначают первую совокупность общесистемных приоритетов по меньшей мере частично на основании максимальной выходной мощности и первой потребности в силовой нагрузке,
настраивают схему переключения питания таким образом, что указанное первое множество активных двигателей электрически соединены с первой комбинацией устройств управления двигателем согласно указанной первой совокупности общесистемных приоритетов,
принимают от первого блока управления запрос мощности для первого двигателя, связанный с первым уровнем приоритета,
определяют назначение первого приоритета для первого уровня приоритета в отношении указанной первой совокупности общесистемных приоритетов,
назначают вторую совокупность общесистемных приоритетов по меньшей мере частично на основании назначения первого приоритета и указанной первой совокупности общесистемных приоритетов,
определяют вторую потребность в силовой нагрузке из второго множества активных двигателей, которое содержит указанное первое множество активных двигателей и первый двигатель,
выбирают вторую комбинацию устройств управления двигателем из указанного множества устройств управления двигателем, необходимую для обеспечения мощности, достаточной для соответствия второй потребности в силовой нагрузке, и
настраивают схему переключения питания таким образом, что указанное второе множество активных двигателей электрически соединены со второй комбинацией устройств управления двигателем согласно указанной второй совокупности общесистемных приоритетов.
2. Способ по п. 1, согласно которому дополнительно:
принимают первый сигнал от второго блока управления, причем первый сигнал связан с запросом мощности, и
регулируют назначение первого приоритета на основании первого сигнала и, таким образом, регулируют указанную вторую совокупность общесистемных приоритетов.
3. Способ по п. 2, согласно которому дополнительно:
определяют, что вторая потребность в силовой нагрузке больше максимальной выходной мощности указанного множества устройств управления двигателем, и
отсоединяют подсовокупность низкоприоритетных активных двигателей.
4. Способ по п. 2, согласно которому дополнительно:
определяют, что вторая потребность в силовой нагрузке больше максимальной выходной мощности указанного множества устройств управления двигателем, и
настраивают схему переключения питания таким образом, что вторая комбинация устройств управления двигателем подает определенное количество энергии на подсовокупность низкоприоритетных активных двигателей, которое уменьшено до значения менее оптимального рабочего количества энергии для указанной подсовокупности низкоприоритетных активных двигателей согласно указанной второй совокупности общесистемных приоритетов.
5. Способ по п. 4, согласно которому дополнительно:
идентифицируют то, что запрос энергии более не является действительным,
повторно назначают первую совокупность общесистемных приоритетов и
настраивают схему переключения питания таким образом, что количество энергии, поданной на подсовокупность низкоприоритетных активных двигателей, увеличивают обратно до оптимального рабочего значения энергии для указанной подсовокупности низкоприоритетных активных двигателей согласно указанной первой совокупности общесистемных приоритетов.
6. Способ по п. 2, согласно которому дополнительно:
определяют, что максимальная выходная мощность указанного множества устройств управления двигателем была снижена до меньшей максимальной выходной мощности, и
отсоединяют подсовокупность низкоприоритетных активных двигателей.
7. Способ по п. 2, согласно которому дополнительно:
определяют, что максимальная выходная мощность указанного множества устройств управления двигателем была уменьшена до меньшей максимальной выходной мощности, и
настраивают схему переключения питания таким образом, что количество энергии, поданной на подсовокупность низкоприоритетных активных двигателей, уменьшают до значения менее оптимального рабочего уровня для указанной подсовокупности низкоприоритетных активных двигателей согласно указанной второй совокупности общесистемных приоритетов.
8. Способ по п. 1, согласно которому первый блок управления представляет собой блок управления питанием шины.
9. Способ по п. 1, согласно которому каждый из указанного множества двигателей может быть выбран из группы, содержащей: электрический запуск основного двигателя, стартер, генератор, электронное устройство управления двигателем, устройство управления вспомогательным блоком питания, электрический запуск вспомогательного двигателя, вспомогательный стартер-генератор, блок управления электрическим запуском батарейного вспомогательного двигателя, двигатель для электрического руления, кабинный воздушный компрессор, гидравлический насос, двигатель для создания азота, вентилятор системы управления условиями окружающей среды и двигатель для охлаждения груза.
10. Способ по п. 2, согласно которому второй блок управления выбран из группы, содержащей: блок управления генератором, электронное устройство управления двигателем, устройство управления вспомогательным блоком питания, блок управления вспомогательным генератором, устройство управления для управления блоком увеличения напряжения батареи, устройство управления электрическим рулением, устройство управления электрическим тормозом, блок управления установкой кондиционирования воздуха, устройство управления гидравлическим насосом, устройство управления системой создания азота, устройство управления для управления вентилятором системы управления условиями окружающей среды и устройство управления системой охлаждения груза.
11. Система управления двигателем, содержащая:
множество двигателей,
множество устройств управления двигателем, выполненных с возможностью параллельного электрического соединения,
схему переключения питания, электрически соединяющую указанное множество двигателей с указанным множеством устройств управления двигателем, и
параллельный модульный преобразователь для динамического управления схемой переключения питания, содержащий компьютер по меньшей мере с одним обрабатывающим устройством и носителем данных для долговременного хранения данных, имеющим выполняемые компьютером инструкции, которые хранятся на этом носителе и которые, при их выполнении на компьютере, вызывают то, что указанный компьютер:
определяет первую потребность в силовой нагрузке из первого множества активных двигателей, которое представляет собой подсовокупность указанного множества двигателей,
выбирает первую комбинацию устройств управления двигателем из указанного множества устройств управления двигателем, необходимую для обеспечения мощности, достаточной для согласования с первой потребностью в силовой нагрузке, по меньшей мере частично на основании максимальной выходной мощности указанного множества устройств управления двигателем,
назначает первую совокупность общесистемных приоритетов по меньшей мере частично на основании максимальной выходной мощности и первой потребности в силовой нагрузке,
настраивает схему переключения питания таким образом, что указанное первое множество активных двигателей электрически соединены с первой комбинацией устройств управления двигателем согласно первой совокупности общесистемных приоритетов,
принимает запрос мощности для первого двигателя от первого блока управления, связанный с первым уровнем приоритета,
определяет назначение первого приоритета для первого уровня приоритета в отношении указанной первой совокупности общесистемных приоритетов,
назначает вторую совокупность общесистемных приоритетов по меньшей мере частично на основании назначения первого приоритета и указанной первой совокупности общесистемных приоритетов,
определяет вторую потребность в силовой нагрузке из второго множества активных двигателей, которое содержит указанное первое множество активных двигателей и первый двигатель,
выбирает вторую комбинацию устройств управления двигателем из указанного множества устройств управления двигателем, необходимую для обеспечения мощности, достаточной для согласования со второй потребностью в силовой нагрузке, и
настраивает схему переключения питания таким образом, что указанное второе множество активных двигателей электрически соединены со второй комбинацией устройств управления двигателем согласно указанной второй совокупности общесистемных приоритетов.
12. Система по п. 11, в которой выполняемые компьютером инструкции, хранящиеся на этом компьютере, дополнительно вызывают то, что указанный компьютер:
принимает первый сигнал от второго блока управления, причем первый сигнал связан с запросом мощности, и
регулирует назначение первого приоритета на основании первого сигнала и, таким образом, регулирует указанную вторую совокупность общесистемных приоритетов.
13. Система по п. 12, в которой выполняемые компьютером инструкции, хранящиеся на этом компьютере, дополнительно вызывают то, что указанный компьютер:
определяет, что вторая потребность в силовой нагрузке больше значения максимальной выходной мощности указанного множества устройств управления двигателем, и
отсоединяет подсовокупность низкоприоритетных активных двигателей.
14. Система по п. 12, в которой выполняемые компьютером инструкции, хранящиеся на этом компьютере, дополнительно вызывают то, что указанный компьютер:
определяет, что вторая потребность в силовой нагрузке больше значения максимальной выходной мощности указанного множества устройств управления двигателем, и
настраивает схему переключения питания таким образом, что вторая комбинация устройств управления двигателем подает определенное количество энергии на подсовокупность низкоприоритетных активных двигателей, которое уменьшено до значения менее оптимального рабочего количества энергии для указанной подсовокупности низкоприоритетных активных двигателей согласно указанной второй совокупности общесистемных приоритетов.
| US 8125164 B2, 21.01.2010 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| EP 1921741 A2, 14.05.2008 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СИСТЕМА ЭНЕРГООБМЕНА ДЛЯ ПРЕОБРАЗОВАНИЯ РАЗЛИЧНЫХ ВИДОВ ЭНЕРГИИ | 1997 |
|
RU2141912C1 |
| СПОСОБ КОНТРОЛЯ ДВИГАТЕЛЯ САМОЛЕТА | 2008 |
|
RU2388661C2 |

