[0001] Настоящее изобретение в общем относится к управлению мощностью и, в частности, к балансировке тока между параллельными инверторами в архитектуре модульного преобразователя. Современные транспортные средства используют большое количество электронной аппаратуры, двигателей, нагревателей и другого оборудования, приводимого в действие электричеством. Электрические двигатели, в частности, находятся повсеместно в современных транспортных средствах, включая летательные аппараты, и приводят в действие все устройства от гидравлических насосов до вентиляторов салона. Обычно каждый из этих электрических двигателей приводится в действие при помощи независимого контроллера двигателя. Размер каждого контроллера двигателя выполнен для обеспечения переноса максимальной величины тока, требуемого для питания его соответствующего двигателя в режиме полной мощности в течение продолжительного периода времени (и обычно дополнительно содержит некоторую дополнительную емкость для безопасности) без перегрева или сбоя в работе.
[0002] В результате, каждый летательный аппарат несет несколько контроллеров двигателя, каждый из которых обычно слишком большого размера и недогружен в течение большей части времени. Другими словами, контроллер двигателя содержит достаточно емкости для запуска этого двигателя в режиме полной мощности в течение продолжительного периода времени плюс запас надежности, но двигатели редко, если вообще когда-либо, работают на полной мощности. Это так потому, что сами двигатели имеют некоторый встроенный запас надежности, и потому, что большую часть времени двигатели работают в режиме пониженной производительности (например, вентилятор салона не всегда включен на высокую скорость). Кроме того, некоторые двигатели используются только периодически или в течение конкретных этапов полета и не используются в течение остального времени. В результате, многие из комплекта тяжелых дорогостоящих контроллеров двигателя летательного аппарата проводят большую часть их срока службы либо неактивными, либо работающими ниже их номинальной выходной мощности.
[0003] Для лучшего использования емкости контроллера двигателя система модульного преобразователя может предоставлять множество модульных выполненных с возможностью назначения и с возможностью динамической переконфигурации контроллеров двигателя, которые могут работать в одиночку или параллельно с другими параллельными контроллерами двигателя для удовлетворения потребностей в регулировке мощности. Указанная система преобразователя соединяет один или более контроллеров, соединенных параллельно, с каждой активной электрической нагрузкой в летательном аппарате, как необходимо, для удовлетворения существующей потребности в электроэнергии. Увеличивающееся использование контроллеров двигателя может обеспечивать соответствующее уменьшение веса и стоимости системы.
[0004] Во время работы системы модульного преобразователя для питания электрического двигателя или другой электрической нагрузки может работать параллельно множество параллельно соединенных инверторов. Однако нагрузка параллельно соединенных инверторов может изменяться из-за производственных допусков и отклонений этих инверторов, а также паразитных элементов, вызванных сопротивлением и индуктивностью проводки и/или других присоединенных компонентов. В результате, приведение в действие параллельно соединенных инверторов с помощью одинаковых управляющих сигналов (drive signal) может приводить к неравномерной нагрузке. Хотя ток от каждого из параллельно соединенных инверторов может быть сбалансирован с использованием индукторов на выходах, эти индукторы имеют тенденцию быть неприемлемо большими и вносить потери при использовании в высокомощных применениях.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0005] Один пример предоставляет способ управления выходной мощностью системы модульного преобразователя, содержащей множество параллельных инверторных блоков, которое содержит первый инверторный блок по меньшей мере с первым узлом выходной фазы и второй инверторный блок по меньшей мере со вторым узлом выходной фазы. Способ включает приведение в действие переключающих элементов первого и второго инверторных блоков с помощью начальных управляющих сигналов для получения синфазной выходной мощности и определение значения смещения для драйвера управления затвором на основании соответствующих первого и второго напряжений на первом и втором узлах выходной фазы. Способ дополнительно включает приведение в действие на основании определенного значения смещения для драйвера управления затвором переключающих элементов первого и второго инверторных блоков с помощью последовательных управляющих сигналов таким образом, что соответствующие величины тока, выдаваемого первым и вторым инверторными блоками при выработке синфазной выходной мощности, сбалансированы.
[0006] Другой пример предоставляет систему модульного преобразователя, содержащую системный контроллер и по меньшей мере первый и второй инверторные блоки, соединенные параллельно и выполненные с возможностью получения синфазной выходной мощности. Каждый инверторный блок из первого и второго инверторных блоков соответственно содержит пару переключающих элементов, между которыми расположен узел выходной фазы, и пару драйверов управления затвором, каждый из которых выполнен с возможностью приема соответствующего сигнала управления (control signal) от системного контроллера и выработки управляющего сигнала для управления переключением соответствующего одного из указанной пары переключающих элементов. Системный контроллер выполнен с возможностью определения значения смещения для драйвера управления затвором на основании соответствующих напряжений на узлах выходной фазы первого и второго инверторных блоков и управления на основании определенного значения смещения для драйвера управления затвором драйверами управления затвором с использованием первого и второго инверторных блоков с помощью последовательных управляющих сигналов таким образом, что величины тока, выдаваемого первым и вторым инверторными блоками при выработке синфазной выходной мощности, сбалансированы.
[0007] Другой пример предоставляет некратковременный компьютерочитаемый носитель, содержащий компьютерный программный код, который при выполнении посредством работы одного или более компьютерных процессоров выполняет операцию управления выходной мощностью системы модульного преобразователя, содержащей множество параллельных инверторных блоков. Указанное множество параллельных инверторных блоков содержит первый инверторный блок по меньшей мере с первым узлом выходной фазы и второй инверторный блок по меньшей мере со вторым узлом выходной фазы. Указанная операция включает осуществление связи с множеством драйверов управления затвором для приведения в действие переключающих элементов первого и второго инверторных блоков с помощью начальных управляющих сигналов для получения синфазной выходной мощности и определение значения смещения для драйвера управления затвором на основании соответствующих первого и второго напряжений на первом и втором узлах выходной фазы. Операция дополнительно включает осуществление связи с указанным множеством драйверов управления затвором для приведения в действие на основании определенного значения смещения для драйвера управления затвором переключающих элементов первого и второго инверторных блоков с помощью последовательных управляющих сигналов таким образом, что соответствующие величины тока, выдаваемого первым и вторым инверторными блоками при выработке синфазной выходной мощности, сбалансированы.
[0008] Раскрытые признаки, функции и преимущества могут быть достигнуты независимо в различных примерах или могут быть объединены в других примерах, дополнительные подробности которых можно увидеть со ссылкой на последующее описание и чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] Для более детального понимания перечисленных выше признаков настоящего изобретения, может быть получено более конкретное описание изобретения, кратко резюмированного выше, со ссылками на примеры, некоторые из которых проиллюстрированы на сопутствующих чертежах. Однако следует отметить, что на сопутствующих чертежах проиллюстрированы только типичные примеры настоящего изобретения и, следовательно, они не должны рассматриваться, как ограничивающие его объем, для настоящего изобретения можно признавать другие равно эффективные примеры.
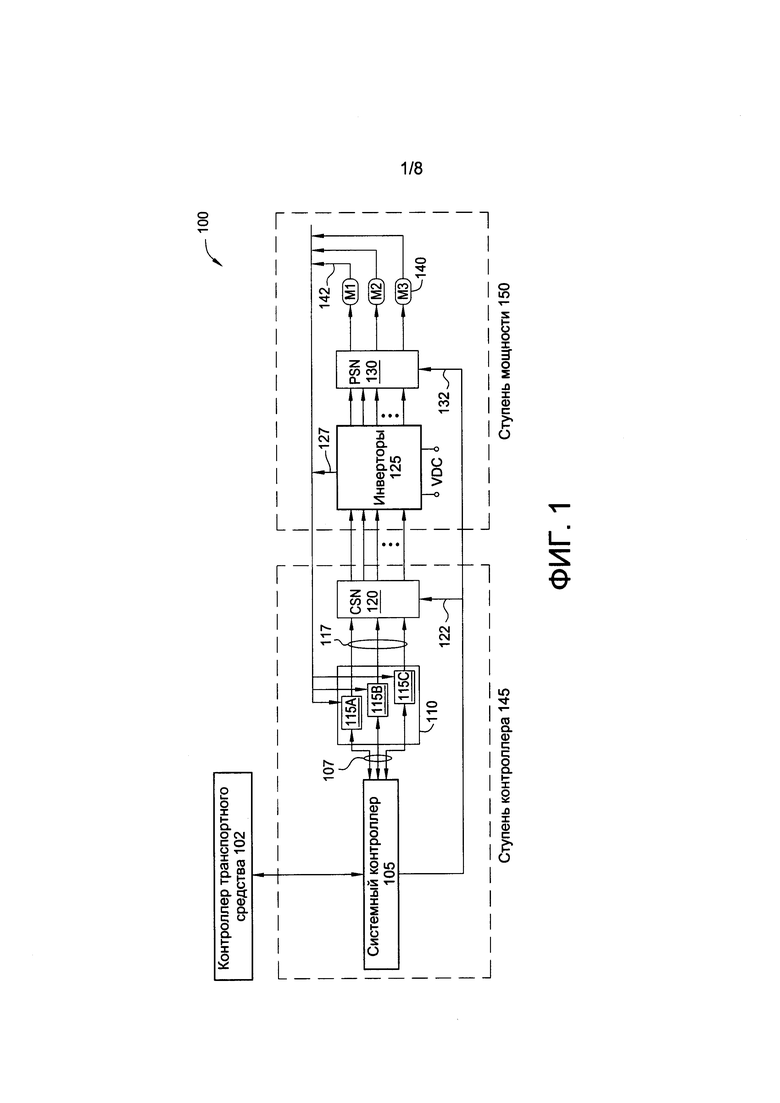
[0010] На фиг. 1 показана система модульного преобразователя в соответствии с одним примером.
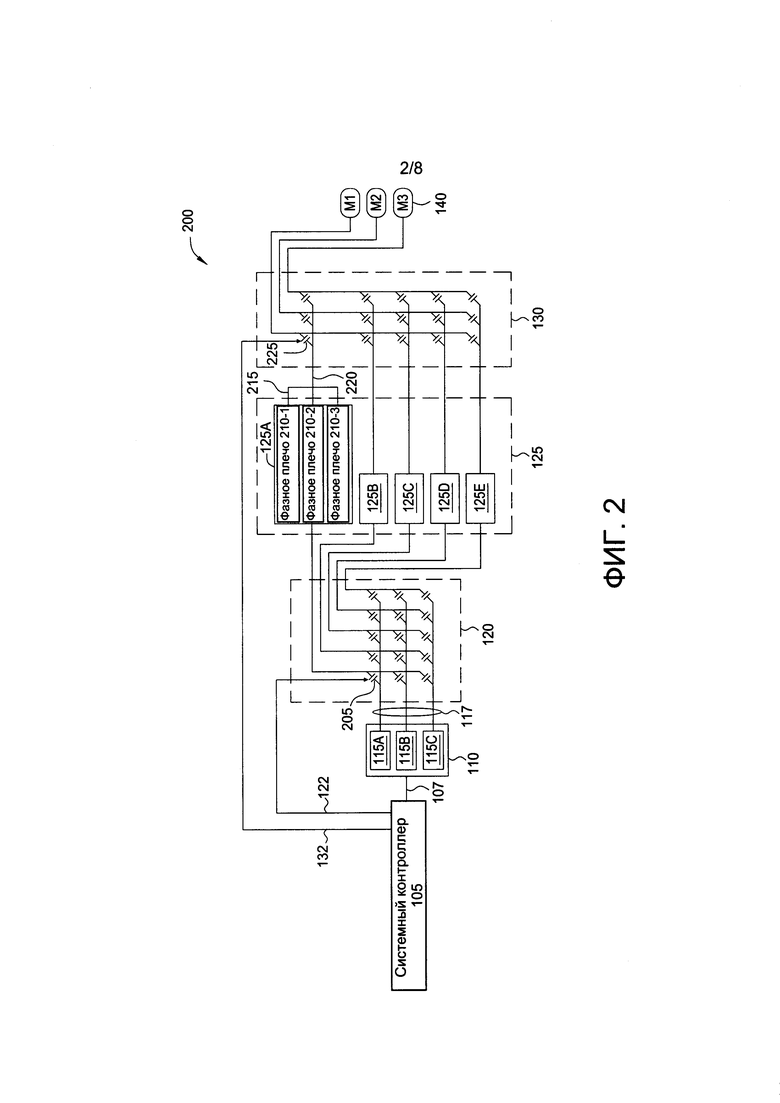
[0011] На фиг. 2 показана схема переключения управления и схема переключения мощности в системе модульного преобразователя в соответствии с одним примером.
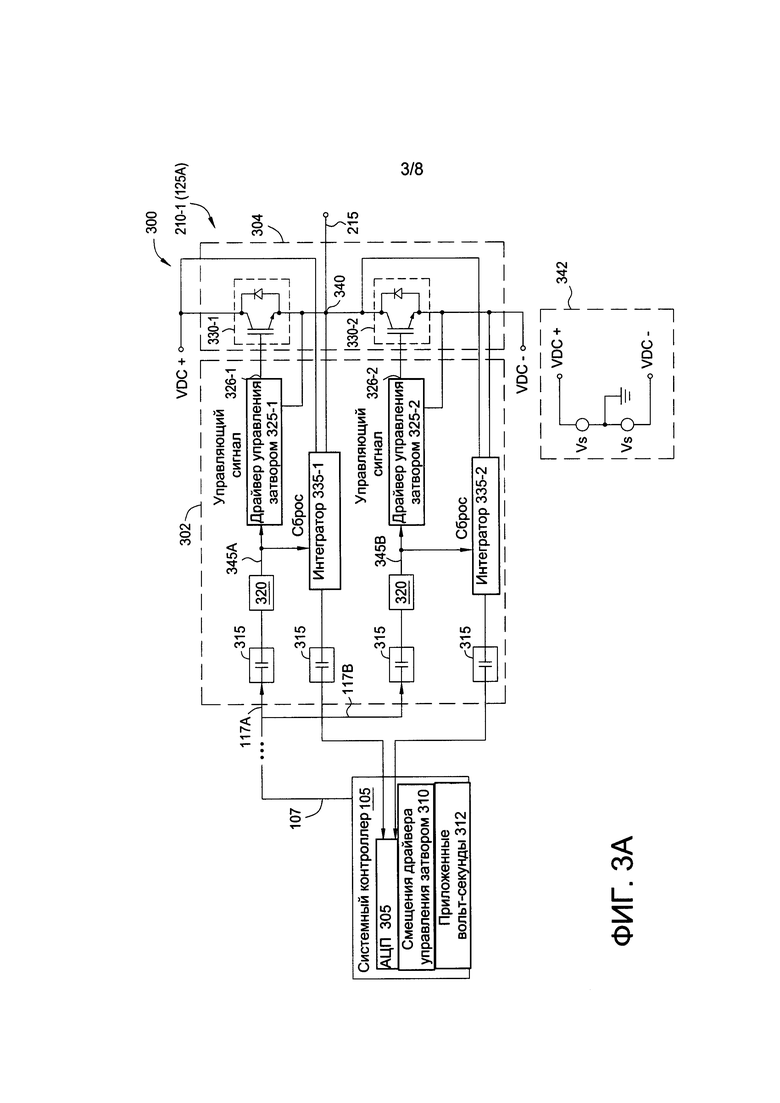
[0012] На фиг. 3А показана компоновка управляющей схемы внутри фазного плеча модульного инвертора в соответствии с одним примером.
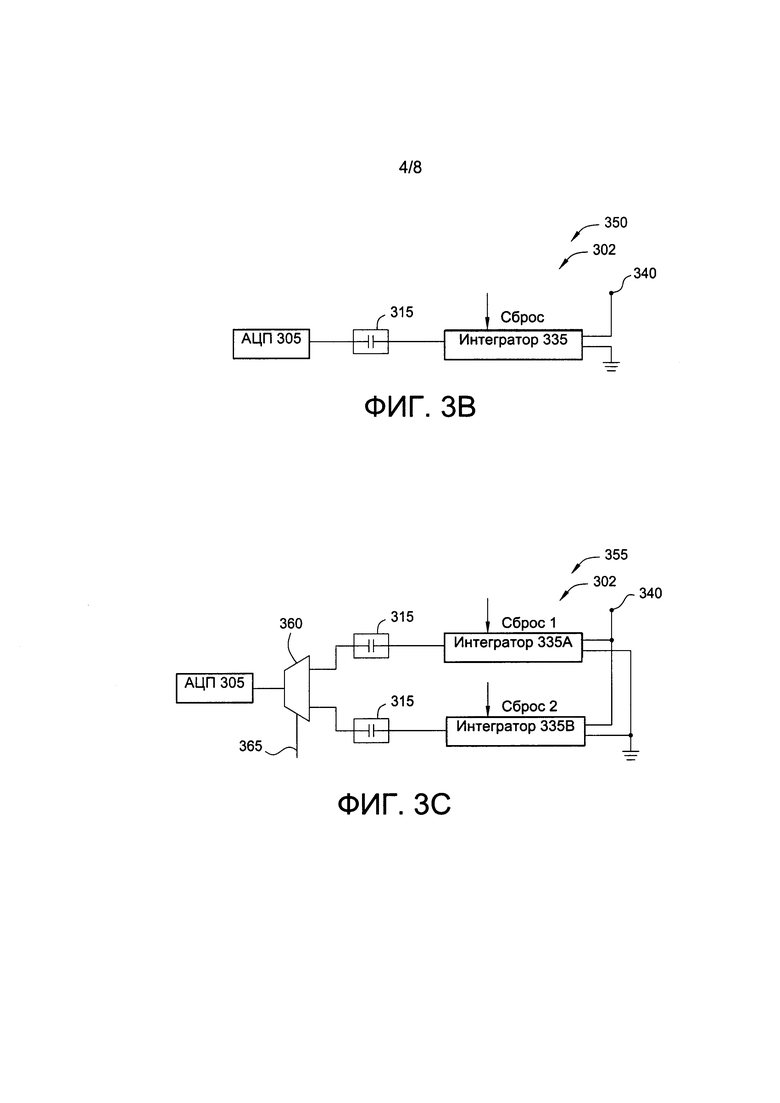
[0013] На фиг. 3В и 3С показаны компоновки интеграторов в управляющей схеме для модульного инвертора в соответствии с одним примером.
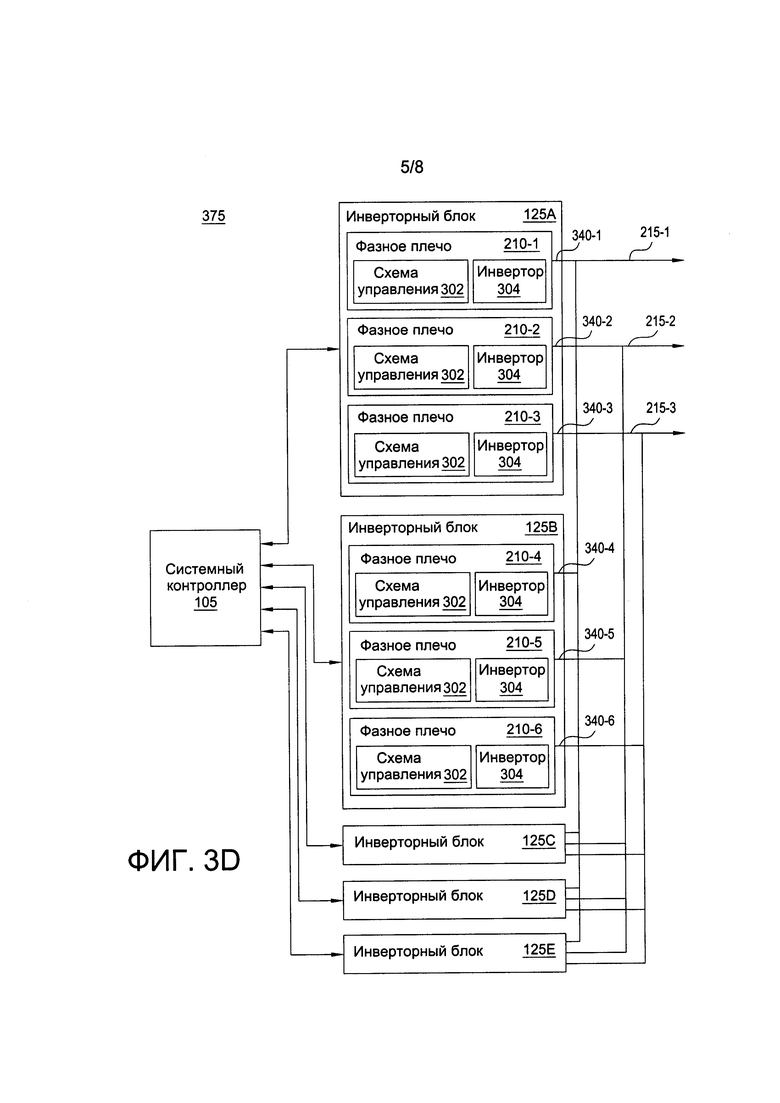
[0014] На фиг. 3D показана компоновка множества инверторов в системе мультифазного модульного преобразователя в соответствии с одним примером.
[0015] На фиг. 4 показан способ управления выходной мощностью системы модульного преобразователя, содержащей параллельные инверторные блоки, в соответствии с одним примером.
[0016] На фиг. 5 и 6 показаны способы определения значения смещения для драйвера управления затвором в соответствии с одним примером.
[0017] Для облегчения понимания там, где это возможно, были использованы идентичные ссылочные обозначения для обозначения идентичных элементов, которые являются общими для чертежей. Предполагается, что элементы, раскрытые в одном примере, могут быть преимущественно использованы в других примерах без конкретного перечисления. Изображения, на которые ссылаются в настоящем документе, не следует понимать, как вычерченные в масштабе, если специально не указано иное. Кроме того, чертежи часто являются упрощенными, а детали или компоненты опущены для ясности представления и объяснения. Чертежи и обсуждение служат для объяснения раскрытых ниже принципов, где одинаковые обозначения указывают на одинаковые элементы.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0018] Для обеспечения балансировки тока между параллельно соединенными первым и вторым инверторными блоками системы модульного преобразователя системный контроллер выполнен с возможностью определения значения смещения для драйвера управления затвором на основании соответствующих напряжений на узлах выходной фазы первого и второго инверторных блоков. Системный контроллер управляет драйверами управления затвором для первого и второго инверторных блоков на основании определенного значения смещения для драйвера управления затвором. В свою очередь, драйверы управления затвором приводят в действие первый и второй инверторные блоки с помощью последовательных управляющих сигналов таким образом, что величины тока, выдаваемые первым и вторым инверторными блоками при выработке синфазной выходной мощности, сбалансированы.
[0019] В некоторых примерах системный контроллер для каждого из первого и второго инверторных блоков рассчитывает соответствующее приложенное вольт-секундное значение, а значение смещения для драйвера управления затвором основано на разности между соответствующими рассчитанными приложенными вольт-секундными значениями. Рассчитанные приложенные вольт-секундные значения могут быть получены во время конкретного цикла переключения инверторных блоков.
[0020] В некоторых примерах система модульного преобразователя дополнительно содержит один или более интеграторов, соединенных с узлом выходной фазы каждого из первого и второго инверторных блоков. Каждый интегратор интегрирует выходное напряжение на одном из узлов выходной фазы относительно по меньшей мере одного опорного напряжения.
[0021] Обратимся к фиг. 1 и 2, система 100 модульного преобразователя может управлять системой параллельных модульных инверторов 125 (также - ''инверторные модули'', ''инверторные блоки'') для приведения множественных и/или различных типов машин постоянного или переменного тока, таких как изображенные двигатели 140 (т.е., двигатели M1, М2, М3). Система 100 модульного преобразователя содержит указанное множество инверторов 125, которые соединены параллельно, а также каждый из которых выполнен с возможностью конфигурации для приема любого из множества алгоритмов 115А, 115В, 115С управления двигателем (также - ''управляющие алгоритмы'', ''алгоритмы''), внедренных в систему 110 управления двигателем через переконфигурируемую схему 120 переключения управления (CSN, control switching network). Система 110 управления двигателем может содержать одну или более схем контроллера двигателя, каждая из которых выполнена с возможностью управления одним или большим количеством двигателей 140. Каждый из параллельных модульных инверторов 125 может быть выполнен с возможностью приведения в действие одной или более из указанного множества электрических нагрузок (например, машин постоянного или переменного тока, таких как двигатели 140), на стороне нагрузки через переконфигурируемую схему 130 переключения мощности (PSN, power switching network). В некотором примере каждый из параллельных модульных инверторов 125 обеспечивает одну фазу выходной мощности на электрические нагрузки. В других примерах каждый из параллельных модульных инверторов 125 обеспечивает несколько фаз выходной мощности (например, трехфазной переменного тока) на электрические нагрузки. Как показано на фиг. 2, инвертор 125А содержит три фазных плеча 210-1, 210-2, 210-3, каждое из которых выполнено с возможностью обеспечения отдельной выходной фазы 215 трехфазного сигнала 220 для приведения в действие выбранных электрических нагрузок.
[0022] Такая конфигурация, например, обеспечивает возможность динамической переконфигурации как схемы 120 переключения управления, так и схемы 130 переключения мощности. Кроме того, любой из инверторов из указанного множества инверторов 125 доступен для приведения в действие любой из указанных электрических нагрузок (таких как двигатели 140) на стороне нагрузки, и любой управляющий алгоритм из множества управляющих алгоритмов 115А, 115В, 115С, внедренных в систему 110 управления двигателем, доступен для управления любым из указанного множества инверторов 125. В результате, один или более инверторов 125 могут приводить в действие один двигатель 140, как необходимо для удовлетворения требований нагрузки, и/или множество двигателей 140 на стороне нагрузки могут быть приведены в действие в то же самое время, каждый из которых может быть приведен в действие с помощью одного или более инверторов 125. Кроме того, множество двигателей 140 на стороне нагрузки могут быть приведены в действие в то же самое время с помощью одинакового алгоритма управления двигателем (например, 115А) или различных алгоритмов управления двигателем (например, некоторые с помощью управляющего алгоритма 115А, некоторые с помощью управляющего алгоритма 115В).
[0023] Как показано на фиг. 1, система 100 содержит системный контроллер 105, выполненный с возможностью осуществления связи с контроллером 102 транспортного средства для получения от него операционных команд и для подачи на него сигналов состояния от системы 100 модульного преобразователя и/или другой информации. В некоторых примерах системный контроллер 105 также может переконфигурировать схему 130 переключения мощности для обеспечения надлежащего количества инверторных модулей 125 параллельно для приведения в действие двигателя 140 в реальном времени. Другими словами, когда нагрузка от двигателя 140 увеличивается, системный контроллер 105 может сигнализировать схеме 130 переключения мощности помещать больше инверторов параллельно. Напротив, когда нагрузка двигателя снижается, системный контроллер 105 может сигнализировать схеме 130 переключения мощности отсоединять один или более инверторов 125. Если необходимо, затем системный контроллер 105 может помещать их параллельно с другими инверторами 125 для приведения в действие других нагрузок.
[0024] В некоторых примерах системный контроллер 105 также может переконфигурировать схему 120 переключения управления, используя сигналы 122 CSN управления для обеспечения надлежащих алгоритмов 115А, 115В, 115С управления двигателем в качестве сигналов 117 управления двигателем на один или более инверторов 125, приводящих в действие один или более типов двигателей. Инверторы 125 могут дополнительно обеспечивать сигналы 127 обратной связи, такие как значения тока и/или напряжения, на систему 110 управления двигателем и выбранный алгоритм 115А, 115В, 115С управления двигателем. Некоторые неограничивающие примеры алгоритмов 115А, 115В, 115С управления двигателем, обеспеченных системным контроллером 105, содержат полеориентированное управление (field-oriented control, FOC), прямое управление моментом (direct torque control, DTC) и вольт-частотное управление (voltage over frequency control, V/F). Различные алгоритмы управления двигателем могут быть полезны для эффективного приведения в действие различных типов двигателей связанного транспортного средства (например, асинхронных двигателей, синхронных двигателей, синхронных двигателей с постоянными магнитами (РМ, permanent magnet), бесщеточных двигателей постоянного тока и т.д.). Например, обычный летательный аппарат может содержать стартерный двигатель-генератор для основных двигателей (двигатель с постоянным магнитом), вентилятор скоростного напора воздуха (асинхронный двигатель) и компрессорный двигатель системы контроля влияния окружающей среды (environmental control system, ECS) (двигатель с постоянным магнитом) и один или более синхронных двигателей, все из которых могут иметь различные требования по мощности.
[0025] В некоторых примерах системный контроллер 105 также может отправлять, например, и без ограничения, значения скорости двигателя, момента или опорной мощности на соответствующие двигатели 140 (например, через систему 110 управления двигателем). В некоторых примерах системный контроллер 105 может быть сохранен и запущен на встроенном контроллере. Системный контроллер 105 может содержать, например, и без ограничения, микроконтроллер, процессор, программируемую вентильную матрицу (field-programmable gate array, FPGA) или специализированную интегральную схему (специализированную ИС). В некоторых случаях системный контроллер 105 может использовать имитатор/эмулятор реального времени или может запускаться в реальном времени.
[0026] В некоторых случаях количество алгоритмов 115А, 115В, 115С управления двигателем может быть определено посредством количества различных нагрузок двигателей. Например, если система 100 имеет три различных типа двигателей 140, подлежащих приведению в действие, тогда могут быть разработаны три алгоритма 115А, 115В, 115С управления двигателем, причем каждый алгоритм 115А, 115В, 115С управления двигателем специфичен для двигателя 140. В другом примере, если все три двигателя 140 выполняют одинаковую функцию, является возможным, что все три нагрузки питаются с использованием одного алгоритма 115А, 115В или 115С управления двигателем.
[0027] Схема 120 переключения управления может динамически конфигурировать один или более инверторов 125, каждый из которых может приводиться в действие посредством специального управляющего алгоритма 115А, 115В, 115С или общего управляющего алгоритма 115А, 115В, 115С, который направляется через схему 120 переключения управления в соответствии с сигналами 122 CSN управления, выдаваемыми посредством системного контроллера 105. В некоторых примерах для улучшения характеристик привода двигателя может быть минимизирована временная задержка между сигналами в схему 120 переключения управления и из нее.
[0028] Схема 120 переключения управления может иметь реализацию на основе программного обеспечения или на основе аппаратного обеспечения. В некоторых примерах программно закодированная схема 120 переключения управления может быть запущена, например, и без ограничения, на встроенном контроллере, имитаторе реального времени или компьютере. В других примерах схема 120 переключения управления может быть реализована с использованием аппаратного устройства, такого как, например, и без ограничения, сложное устройство с программируемой логикой (complex programmable logic device, CPLD), специализированные интегральные схемы или матрицы FPGA. Как показано на фиг. 2, каждый управляющий переключатель (либо на основе программного обеспечения, либо на основе аппаратного обеспечения) схемы 120 переключения управления управляется посредством сигналов 122 CSN управления для соединения выбранных управляющих алгоритмов 115 с выбранным инвертором (инверторами) 125.
[0029] В некоторых примерах схема 130 переключения мощности может быть динамически сконфигурирована с использованием сигналов 132 PSN управления от системного контроллера 105 для соединения одного или более инверторов 125 для приведения в действие одного или более двигателей 140 за один или более специальных управляющих алгоритмов 115А, 115В, 115С от системы 110 управления двигателем. В некоторых примерах схема 130 переключения мощности может действовать в качестве цепи короткого замыкания и/или устройства защиты от сверхтоков. В этом случае, переключатель (переключатели) 130 мощности, связанные с коротко замкнутой или сверхтоковой нагрузкой, открыты при обнаружении неисправности.
[0030] Схема 130 переключения мощности может быть реализована с использованием переключателей 225 мощности, некоторые неограничивающие примеры которых содержат твердотельные реле, механические реле, транзисторы и другие управляемые переключатели мощности. Системный контроллер 105 управляет каждым переключателем 225 мощности с использованием сигналов 132 управления. Инверторы 125 преобразуют мощность постоянного тока (т.е. VDC на фиг. 1) в запрошенную выходную мощность переменного тока (например, с различными уровнями напряжения, частотами, формами сигнала и т.д.) для приведения в действие различных машин переменного тока (например, двигателей 140) посредством выбранного алгоритма 115А, 115В, 115С двигателя и системного контроллера 105. Инверторы 125 могут содержать, например, и без ограничения, биполярные транзисторы с изолированным затвором (БТИЗ), полевые транзисторы с МОП структурой (МОП-транзисторы) и биполярные плоскостные транзисторы.
[0031] Как показано на фиг. 2, схема 120 переключения управления содержит достаточное количество управляющих переключателей 205 таким образом, что каждый алгоритм 115А, 115В, 115С управления двигателем может быть выборочно и динамически соединен с любым одним или большим количеством из инверторов 125 (т.е. инверторами 125А, 125В, 125С, 125D и/или 125Е). Однако в других примерах некоторые комбинации инверторов 125 и алгоритмов 115А, 115В, 115С управления двигателем могут отсутствовать как не требующиеся или не выполнимые, что может уменьшать количество управляющих переключателей, содержащихся в схеме 120 переключения управления. Схема 130 переключения мощности содержит достаточное количество переключателей 225 мощности таким образом, что каждый из инверторов 125 может быть выборочно и динамически соединен с любым одним или большим количеством электрических нагрузок (т.е., двигателями 140). Аналогично, в других примерах некоторые комбинации инверторов 125 и электрических нагрузок могут отсутствовать для уменьшения количества переключателей 225 мощности, содержащихся в схеме 130 переключения мощности. Хотя показаны пятнадцать (15) управляющих переключателей 205 (соответствующих трем алгоритмам 115 управления двигателем и пяти инверторам 125) и пятнадцать (15) переключателей 225 мощности (соответствующих пяти инверторам 125 и трем электрическим нагрузкам), эти количества могут изменяться на основании реализации. Например, количество параллельно соединенных инверторов 125 может быть больше пяти, таким как любое подходящее количество N. Следовательно, размер схемы 120 переключения управления будет 3×N, и размер схемы 130 переключения мощности будет 3×N. Аналогично, количество двигателей (или нагрузок) 140 может быть больше трех, например, количество М. Следовательно, размер схемы переключения мощности будет N×M.
[0032] В некоторых примерах система 100 модульного преобразователя разделена на множество ступеней. Как показано, система 100 модульного преобразователя содержит ступень 145 контроллера и ступень 150 мощности. Компоненты в ступени 145 контроллера (например, системный контроллер 105, система 110 управления двигателем) могут работать в различном режиме энергоснабжения, чем компоненты в ступени 150 мощности. Например, ступень 145 контроллера может питаться при относительно низком напряжении (например, приблизительно между 1В и 20В), которое является подходящим для работы компонентов ступени контроллера, тогда как ступень 150 мощности запитана с относительно более высокими напряжениями (например, приблизительно между 100В и 1000В или больше), подходящими для получения выходной мощности, требуемой для приведения в действие нагрузок (таких как двигатели 140). Кроме того, в некоторых примерах ступень 150 мощности выполнена с возможностью обеспечения выходной мощности, имеющей множество фаз (например, трехфазный выход переменного тока) для приведения в действие нагрузок. В таких примерах каждое соединение между инверторами 125, схемой 130 переключения мощности и двигателями может представлять трехфазное силовое соединение. Благодаря разделению компонентов системы 100 модульного преобразователя на множество ступеней отсутствует необходимость выполнения компонентов ступени 145 контроллера с размерами, обеспечивающими возможность обслуживания более высоких напряжений и/или токов ступени 150 мощности. В результате, ступень 145 контроллера в целом может содержать меньшие и/или менее вносящие потери компоненты, уменьшая вес и улучшая эффективность системы 100 модульного преобразователя.
[0033] Управляющие сигналы и/или сигналы обратной связи, передаваемые между ступенью 145 контроллера и ступенью 150 мощности, могут пересекать изолирующий барьер, выполненный для предотвращения влияния более высоких напряжений (например, больших напряжений постоянного тока) ступени 150 мощности на низковольтные компоненты ступени 145 контроллера. Как показано, системный контроллер 105 обменивается сигналами 107 управления с системой 110 управления двигателем для выбора конкретных алгоритмов 115 управления двигателем. Система 110 управления двигателем обеспечивает выбранный алгоритм (алгоритмы) в качестве сигналов 117 управления двигателем, которые передаются по выбранному маршруту (маршрутам) в схеме 120 переключения управления и доставляются на инверторы 125. Двигатели 140 обеспечивают один или более сигналов 142 обратной связи двигателя на алгоритмы 115 управления двигателем для обновленного управления. Некоторые неограничивающие примеры сигналов 142 обратной связи двигателя содержат значения тока, напряжения, скорости и положения.
[0034] В еще одних примерах система 100 модульного преобразователя может назначать нагрузки на основании фактора приоритета нагрузки. Другими словами, если, например, количество нагрузок, запрошенных внешними системами летательного аппарата (т.е. контроллером 102 транспортного средства) больше, чем может быть обеспечено системой 100 модульного преобразователя, тогда система 100 модульного преобразователя может назначать нагрузки при помощи фактора приоритета нагрузки, при этом нагрузки с более высоким приоритетом будут запитаны до нагрузок с более низким приоритетом. Если летательный аппарат (через контроллер 102 транспортного средства) выполняет запрос на относительно большую нагрузку, например, для выпуска шасси, система 100 может временно переназначать некоторые или все из инверторов 125 для питания двигателя (двигателей) 140, связанных с шасси. Когда шасси опущены и зафиксированы, в свою очередь, система 100 модульного преобразователя может переназначать инверторы 125 на их предыдущие нагрузки (или на новые существующие нагрузки). Например, вентиляторы салона могут быть временно деактивированы в интересах выпуска шасси и повторно запущены, когда шасси опущено.
[0035] В некоторых примерах, таких как когда существует избыток нагрузок с низким приоритетом, совместно превышающих номинальную мощность системы 100 модульного преобразователя, тогда система 100 модульного преобразователя может питать некоторые или все из указанных нагрузок со сниженными установками. Таким образом, все нагрузки запитаны, но могут работать со сниженной скоростью или емкостью. Так что, например, вентиляторы салона летательного аппарата, освещение и система развлечений могут требовать мощность в одно и то же время в превышении номинала системы 100 модульного преобразователя. В результате, система 100 модульного преобразователя, например, может обеспечивать полную мощность на систему развлечений, но слегка понижать скорость вентиляторов салона и интенсивность освещения для снижения полного потребления мощности.
[0036] На фиг. 3А показана компоновка схемы преобразователя в фазном плече модульного инвертора в соответствии с одним примером. В одной реализации системы модульного преобразователя (например, системы 100, 200 модульного преобразователя, описанных выше) компоновка 300 представляет модульный инвертор 125, обеспечивающий однофазную выходную мощность. В мультифазной реализации системы модульного преобразователя компоновка 300 представляет фазное плечо 210 модульного инвертора 125, выполненное с возможностью соединения параллельно с фазными плечами 210 других инверторов 125. Хотя на фиг. 3 показано подробное изображение распознавания и управляющей схемы 302, относящейся к одному инвертору или фазному плечу 210 одного инвертора, специалисту в данной области техники будет понятно, что на основании этой реализации системы модульного преобразователя могут быть обеспечены множество копий указанной схемы. Согласно примеру на фиг. 2, каждый из пяти инверторов 125А-125Е содержит три соответствующих фазных плеча 210-1, 210-2 и 210-3, что приводит в сумме к пятнадцати копиям управляющей схемы 302 на фиг. 3А. Как показано, компоновка 300 содержит множество параллельно соединенных инверторов 125А, 125В, которые выполнены посредством схемы переключения мощности с возможностью обеспечения мощности на общую нагрузку. Модульный инвертор 125 содержит управляющую схему 302, соединенную с системным контроллером 105 и выполненную с возможностью управления переключателями 330-1, 330-2 (также ''переключающие элементы'' 330) инвертора 304. Между переключателями 330-1, 330-2 расположен узел 340 выходной фазы. Переключатели 330-1, 330-2 могут иметь любую подходящую реализацию, такую как биполярные транзисторы с изолированным затвором (БТИЗ), полевые транзисторы с МОП структурой (МОП-транзисторы) биполярные плоскостные транзисторы и т.д. Узел 340 выходной фазы несет выходную мощность 215. Источник 342 питания обеспечивает мощность, используемую для выработки выходной мощности 215, а инвертор 304 управляет формой сигнала выходной мощности 215 в соответствии с расчетом времени переключения, продиктованным управляющими сигналами 326-1, 326-2. Источник 342 питания обеспечивает опорные напряжения VDC+, VDC- на инвертор 304, которые, как показано, соответствуют заранее определенным напряжениям Vs и -Vs с потенциалом земли между ними. Возможны другие конфигурации источника 342 питания, такие как VDC- на потенциале земли.
[0037] Переключающие элементы 330-1, 330-2 могут быть разработаны таким образом, что имеют заранее определенный относительный переключающий уровень или другие относительные переключающие свойства, но во время работы могут вести себя несколько отлично от проекта из-за производственных допусков, наличия паразитных элементов на основании близлежащих компонентов и т.д. Другими словами, переключатели 330-1, 330-2 могут отличаться в работе друг от друга и/или могут отличаться от требуемого результата управляющих сигналов 326-1, 326-2, выдаваемых драйверами 325-1, 325-2 управления затвором.
[0038] Во время работы системный контроллер 105 выдает сигналы 107 управления, которые используются для выбора алгоритмов управления двигателем (не показаны; 115А, 115В, 115С на фиг. 1, 2) для выдачи сигналов 117А, 117В управления двигателем для управления схемой 302 для управления модульным инвертором 125. Для предотвращения перехода сигналов постоянного тока от модульного инвертора 125 на системный контроллер 105 вдоль каждого маршрута сигналов 117А, 117В управления двигателем расположены изолирующие барьеры 315. Изолирующие барьеры 315 могут иметь любую подходящую реализацию для гальванической изоляции, такую как конденсаторы класса X или Y. Управляющая схема 302 также содержит защитную логику 320, расположенную между изолирующими барьерами 315 и драйверами 325-1, 325-2 управления затвором и которая может иметь любую подходящую реализацию для защиты нагрузок во время конкретных эксплуатационных условий, такая как содержащая логику обнаружения короткого замыкания, логику обнаружения перегрузки, логику обнаружения перегрева и т.д., реализованные в аппаратном и/или программном обеспечении. Если любое из этих эксплуатационных условий обнаружено, защитная логика 320 прерывает доставку конкретного сигнала (сигналов) 117А и/или 117В управления двигателем на драйвер (драйверы) 325-1, 325-2 управления затвором для предотвращения повышенного износа или повреждения присоединенной нагрузки. Сигналы 117А и 117В управления двигателем выдаются в качестве соответствующих сигналов 345А, 345В управления на драйверы 325-1, 325-2 управления затвором. На основании управляющих сигналов 345А, 345В, драйверы 325-1, 325-2 управления затвором генерируют управляющие сигналы 326-1, 326-2 для переключателей 330-1, 330-2 для обеспечения требуемой формы сигнала выходной мощности 215. В некоторых примерах для приведения в действие нагрузки выходную мощность 215 обеспечивают в виде сигнала с широтно-импульсной модуляцией (ШИМ).
[0039] Управляющая схема 302 содержит один или более интеграторов 335-1, 335-2, соединенных с узлом 340 выходной фазы и с опорным напряжением. В некоторых примерах интеграторы 335-1, 335-2 являются аналоговыми интеграторами (например, интегратор на операционном усилителе), выполненными с возможностью обеспечения непрерывного выбора дискретных напряжений на узле 340 выходной фазы. Хотя использование других типов интеграторов является возможным, в целом аналоговые интеграторы обеспечивают несколько преимуществ по сравнению с другими цифровыми интеграторами. Цифровые интеграторы могут быть более сложными и/или дорогостоящими для интегрирования в компоновку 300. Обнаружение разностей коэффициентов заполнения между различными инверторами 125, которые могут быть порядка доли процента времени включения переключателя, требует большого количества выборок. Например, подходящая выборка выходной мощности 215 в десятки или сотни килогерц (кГц), что не является необычным для реализаций с широтно-импульсной модуляцией (ШИМ), может потребовать частоту выборки в диапазоне мегагерц (МГц). По сравнению с этим аналоговый интегратор обеспечивает непрерывное по времени интегрирование выходной мощности 215 с увеличенной точностью и разрешением. Аналоговый интегратор также обеспечивает одно аналоговое значение по изолирующей границе 315 на системный контроллер, снижая требования к ширине полосы.
[0040] Как показано, интегратор 335-1 соединен с узлом 340 выходной фазы и VDC+, а интегратор 335-2 соединен с узлом 340 выходной фазы и VDC-. Каждый из интеграторов 335-1, 335-2 выполнен с возможностью интегрирования по одному или большему количеству переключающих циклов управляющих сигналов 326-1, 326-2 и с возможностью передачи выходного сигнала через изолирующий барьер 315 на системный контроллер 105. Системный контроллер 105 содержит аналогово-цифровой преобразователь (АЦП) 305, выполненный с возможностью преобразования выходных сигналов от интеграторов 335-1, 335-2 в соответствующие дискретные значения.
[0041] Значения, соответствующие различным переключателям 330, могут сравниваться системным контроллером 105 с каждым другим и/или с требуемым результатом управляющих сигналов 326-1, 326-2 для определения, работают ли переключатели 330, как предполагалось, или с некоторой ошибкой. В некоторых примерах системный контроллер 105 рассчитывает приложенное вольт-секундное значение 312, соответствующее каждому переключателю 330-1, 330-2. Например, во время конкретного переключающего цикла драйвер 325-1 управления затвором обеспечивает управляющий сигнал 326-1 на переключатель 330-1, который выполнен с возможностью приложения 1000В на выходной узел 340 в течение одной миллисекунды (1 мс) - требуемое приложенное вольт-секундное значение, равное 1,000 В⋅с. Эти значения предоставлены для упрощенных расчетов и может изменяться на основании реализации инверторов 125 силовых требований присоединенной нагрузки. Из-за допусков и/или паразитных элементов для переключателя 330-1, скажем, рассчитанное приложенное вольт-секундное значение 312, действительно приложенное к переключателю 33-1 равно 1,001 В⋅с, соответствует ошибке в 0,001 В⋅с.
[0042] В некоторых примерах системный контроллер 105 дополнительно выполнен с возможностью расчета одного или более смещений 310 драйвера управления затвором на основании определенной ошибки. Смещения 310 драйвера управления затвором могут иметь любую подходящую форму для регулировки расчета времени (или коэффициента заполнения) управляющего сигнала 326-1. Приложение рассчитанного смещения (смещений) 310 драйвера управления затвором на драйвер 325-1 управления затвором регулирует связанный расчет времени переключателя 330-1 и уменьшает или устраняет ошибку между требуемым приложенным вольт-секундным значением и действительно приложенным вольт-секундным значением. Таким образом, в текущем примере, системный контроллер прикладывает смещение 310 для драйвера управления затвором на сигналы 107 управления, которые в свою очередь влияют на сигнал 345А управления и побуждают переключатель 330-1 уменьшать свой коэффициент заполнения таким образом, что рассчитанное приложенное вольт-секундное значение 312, действительно приложенное к переключателю 330-1, является требуемым значением 1,000 В⋅с.
[0043] На фиг. 3В и 3С показаны альтернативные компоновки интеграторов в системе модульного инвертора. Как описано выше, компоновка 300 на фиг. 3А изображает инвертор 125, как содержащий первый интегратор 335-1, соединенный с узлом 340 выходной фазы и первой шиной источника напряжения VDC+, и второй интегратор 335-2, соединенный с узлом 340 выходной фазы и второй шиной источника напряжения VDC-. Компоновка 350 (фиг. 3В) содержит один интегратор 335 для инвертора 125, причем интегратор 335 выполнен с возможностью измерения напряжений на узле 340 выходной фазы, который привязан к потенциалу земли.
[0044] Компоновка 355 (фиг. 3С) содержит множество интеграторов 335А, 335В, выполненных с возможностью измерения напряжений на узле 340 выходной фазы, которые привязаны к потенциалу земли. Измерения интеграторов 335А, 335В могут быть выборочно обеспечены на АЦП 305 с использованием переключающей компоновки, такой как мультиплексор 360. Выбранный сигнал 365 может быть обеспечен посредством системного контроллера 105 (не показан). В некоторых примерах измерения могут быть обеспечены в чередующейся модели от интеграторов 335А, 335В для обеспечения увеличенной точности.
[0045] Как обсуждено выше, каждый из интеграторов 335-1, 335-2 выполнен с возможностью интегрирования по одному или большему количеству переключающих циклов управляющих сигналов 326-1, 326-2. Измерения, выполненные посредством интеграторов 335-1, 335-2, могут быть периодически сброшены с использованием сигнала сброса, поданного на интеграторы 335-1, 335-2. В некоторых примерах сигналы 345А, 345В управления, подаваемые на драйверы 325-1, 325-2 управления затвором, могут обеспечивать подходящий сигнал сброса. Например, передний фронт сигналов 345А, 345В управления может указывать на завершение конкретного переключающего цикла и может быть использован для запуска сброса интеграторов 335-1, 335-2. В других примерах системный контроллер 105 может генерировать отдельный сигнал сброса (не показан) для интеграторов 335-1, 335-2.
[0046] Сброс интеграторов 335-1, 335-2 обычно не является мгновенным событием. В примере с аналоговыми интеграторами, содержащими конденсатор обратной связи, сброс интегратора может содержать закрытие переключателя для вызывания разряда конденсатора обратной связи в соответствии со связанной временной постоянной. Следовательно, во время некоторых временных периодов интеграторы 335-1, 335-2 не интегрируют значения напряжения узла 340 выходной фазы, которые могут влиять на результирующие измерения.
[0047] Компоновка 355 (фиг. 3С) обеспечивает одни средства для улучшения точности измерения. Во время сброса первого интегратора 335А, управляемого посредством первого сигнала сброса (т.е. СБРОС 1), АЦП 305 принимает измерения от второго не сбрасываемого интегратора 335 В для более полного захвата значений напряжения узла 340 выходной фазы. Во время сброса второго интегратора 335В, управляемого посредством второго сигнала сброса (т.е. СБРОС 2), АЦП 305 принимает измерения от первого не сбрасываемого интегратора 335В. Выбранный сигнал 365, управляющий мультиплексором 360, может быть отдельным сигналом, выдаваемым от системного контроллера 105 (не показан) или может быть основанным на логической комбинации первого и/или второго сигналов сброса.
[0048] Также возможны другие методы регулировки измерений для компенсации в течение периодов сброса. Например, системный контроллер 105 (не показан) может выполнять математическую экстраполяцию для измерения (измерений) АЦП 305, соответствующих периодам сброса. Такой подход может быть выполнимым, где перекрестные электромагнитные помехи (ЭМП), такие как шумы, внесенные другими переключающими элементами компоновок 300, 350, 355, управляются относительно хорошо.
[0049] Хотя различные компоновки 300, 350, 355 были обсуждены конкретно в отношении однофазной выходной мощности 215, специалистам в данной области техники будет понятно, что указанные методы могут быть применены к мультифазным инверторным модулям (например, соответствующим приведению в действие мультифазной нагрузки) и могут быть применены через работу двух или более модульных инверторов.
[0050] Возможны другие реализации компоновок 300, 350, 355. В одном альтернативном примере системный контроллер 105 и АЦП 305 расположены на ''стороне мощности'' изолирующей границы 315 (т.е. с драйверами 325-1, 325-2 управления затвором и переключателями 330-1, 330-2). Такая реализация будет обычно требовать увеличенной ширины полосы через изолирующую границу 315, поскольку системный контроллер 105 все еще может требоваться для осуществления связи с внешним контроллером транспортного средства и/или другими управляющими элементами в режиме энергоснабжения. В другом альтернативном примере между драйверами 325-1, 325-2 могут быть обеспечены быстрые контуры управления, и измерения напряжения выполнены на узле 340А выходной фазы, которые в некоторых случаях могут быть использованы для реализации смещений 310 драйвера управления затвором вместо системного контроллера 105. В других случаях системный контроллер 105 обеспечивает смещения 310 драйвера управления затвором, а быстрые контуры управления обеспечивают регулировки для управляющих сигналов 326-1, 326-2, которые относительно малы по сравнению со смещениями 310 драйвера управления затвором.
[0051] На фиг. 3D показана компоновка 375 множества инверторов в системе мультифазного модульного преобразователя в соответствии с одним примером. В частности, компоновка 375 иллюстрирует, что для балансировки получения тока между инверторными модулями системы мультифазного преобразователя могут быть использованы методы, аналогичные обсужденным выше, для регулировки работы драйверов управления затвором для модульных инверторов.
[0052] Инверторные блоки 125А и 125В сконфигурированы аналогичным образом, причем каждый их них имеет три фазных плеча с тремя узлами 340 выходной фазы. Хотя это не показано явным образом, предположим, что инверторные блоки 125С-125Е также аналогичным образом сконфигурированы для трехфазной работы. Как показано, узлы 340-1 и 340-4 выходной фазы соединены вместе (а также и с узлами выходной фазы инверторных блоков 125С-125Е) для получения выходной мощности 215-1, имеющей первую фазу. Другими словами, фазные плечи 210-1 и 210-4 соединены параллельно. Узлы 340-2 и 340-5 выходной фазы соединены вместе (снова, с узлами выходной фазы инверторных блоков 125С-125Е) для получения выходной мощности 215-2, имеющей вторую фазу. Узлы 340-3 и 340-6 выходной фазы соединены вместе (снова, с узлами выходной фазы инверторных блоков 125С-125Е) для получения выходной мощности 215-3, имеющей третью фазу.
[0053] Однако даже в примерах, где инверторные блоки 125А-125Е совместно используют одинаковую реализацию, каждый из инверторов 304 инверторных блоков 125А-125Е может вести себя несколько различно во время работы из-за производственных допусков, наличия паразитных элементов на основании близлежащих компонентов и т.д. Инверторы 304 могут отличаться в работе друг от друга и/или могут отличаться от требуемого результата управляющих сигналов, поданных на инверторы 304 посредством управляющей схемы 302.
[0054] Для смягчения этих различий управляющая схема 302, содержащаяся в каждом фазном плече 210, отбирает пробы напряжений на соответствующем узле 340 выходной фазы и передает эти напряжения на системный контроллер 105. Системный контроллер 105 может рассчитывать приложенные вольт-секундные значения для каждого из узлов 340 выходной фазы, которые затем могут сравниваться для определения, имеет ли какой-либо из инверторов 125А-125Е неравномерную нагрузку. Системный контроллер 105 также может генерировать один или более смещений драйвера управления затвором для управления последующей работой инверторов 304 для подавления любой неравномерной нагрузки и/или ошибки между требуемыми приложенными вольт-секундными значениями и значениями, фактически приложенными инверторами 304.
[0055] Со ссылкой на предыдущий пример, скажем, что системный контроллер 105 отправляет сигналы управления на параллельно соединенные фазные плечи 210-1, 210-4, которые выполнены с возможностью побуждения соответствующих инверторов 304 прикладывать 1000В на выходные узлы 340-1, 340-4 в течение 1 мс (т.е. требуемое значение 1,000 В⋅с). Из-за допусков и/или паразитных элементов для инверторов 304, скажем, приложенные вольт-секундные значения, рассчитанные системным контроллером 105, равны 1,001 В⋅с для фазного плеча 210-1 и 0,999 В⋅с для фазного плеча 210-4.
[0056] В одном примере системный контроллер 105 прикладывает рассчитанное смещение драйвера управления затвором на фазное плечо 210-1 для уменьшения коэффициента заполнения соответствующего инвертора для соответствия значению 0,999 В⋅с для фазного плеча 210-4. В качестве одной альтернативы системный контроллер 105 прикладывает рассчитанное смещение драйвера управления затвором на фазное плечо 210-4 для приложения указанных 1000B в течение более длинного периода и соответствия значению 1,001 В⋅с для фазного плеча 210-1. В качестве другой альтернативы системный контроллер 105 прикладывает смещения для драйвера управления затвором на оба фазных плеча 210-1, 210-4 для балансировки выхода от инверторов и коррекции разностей между рассчитанными приложенными вольт-секундными значениями (т.е., 1,001 В⋅с, 0,999 В⋅с) и требуемого результата управляющих сигналов (т.е., 1,000 В⋅с).
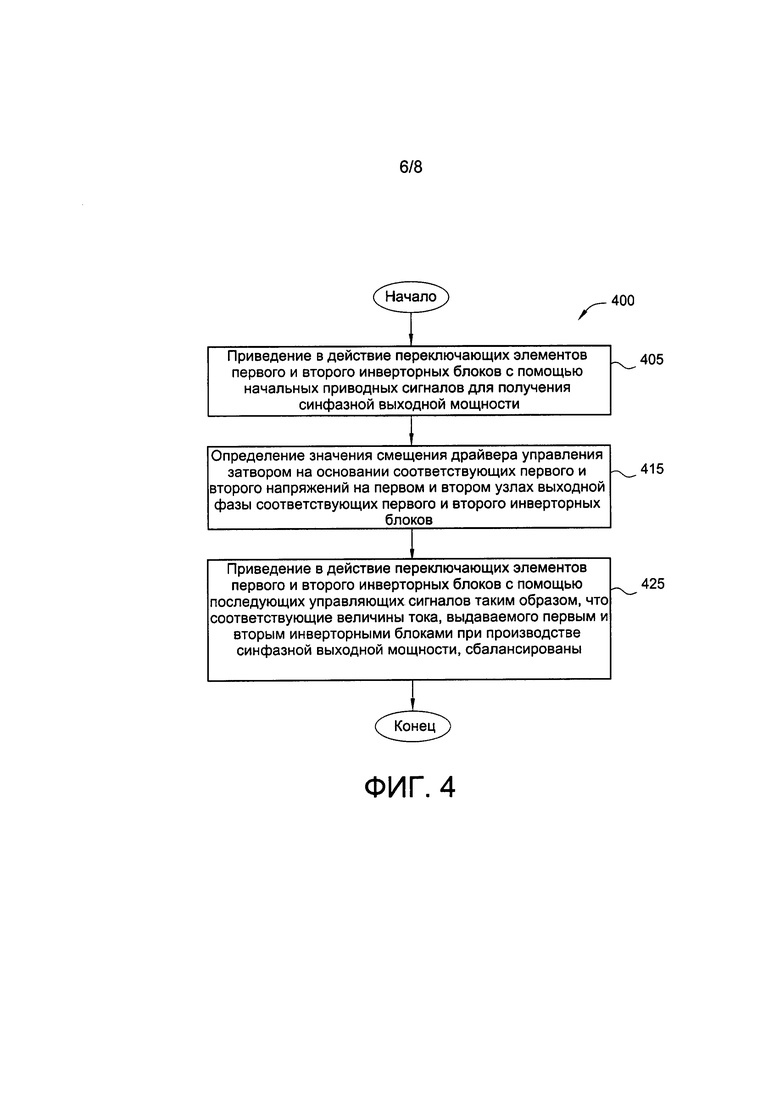
[0057] На фиг. 4 показан способ управления выходной мощностью системы модульного преобразователя, содержащей множество параллельных инверторных блоков, в соответствии с одним примером. В целом, способ 400 может быть выполнен в соответствии с любым из примеров системы 100, 200 модульного преобразователя и компоновок 300, 350, 355, 375, обсужденных выше.
[0058] Способ 400 начинается в блоке 405, где переключающие элементы первого и второго инверторных блоков приводят в действие с помощью начальных управляющих сигналов для получения синфазной выходной мощности. Каждый из первого и второго инверторного блока может содержать различные фазные плечи, параллельно соединенные вместе с использованием схемы переключения мощности. Приведение указанных сигналов в действие может быть выполнено посредством драйверов управления затвором первого и второго инверторных блоков. В некоторых примерах начальные управляющие сигналы для первого инверторного блока и второго инверторного блока являются одинаковыми, но это не является требованием.
[0059] В блоке 415 определяют значение смещения для драйвера управления затвором на основании соответствующих первого и второго напряжений на первом и втором узлах выходной фазы соответствующих первого и второго инверторных блоков. Определение значения смещения для драйвера управления затвором может быть определено посредством системного контроллера, соединенного с первым и вторым инверторными блоками, или, альтернативно, посредством одного или более локальных быстрых контуров управления, соединенных с драйверами управления затвором и узлами выходной фазы.
[0060] В некоторых примерах определение значения смещения для драйвера управления затвором включает интегрирование каждого из первого и второго напряжений относительно по меньшей мере одного опорного напряжения с использованием по меньшей мере одного интегратора, соединенного с каждым из первого и второго узлов выходной фазы. В некоторых примерах определение значения смещения для драйвера управления затвором включает расчет соответствующего приложенного вольт-секундного значения для каждого из первого и второго инверторных блоков. Значение смещения для драйвера управления затвором основано на разности между соответствующими расчетными приложенными вольт-секундными значениями, которая указывает на дисбаланс нагрузки между первым и вторым инверторными блоками. Значение смещения для драйвера управления затвором может быть дополнительно основано на разности между расчетными приложенными вольт-секундными значениями и требуемым результатом управляющих сигналов.
[0061] В блоке 425 переключающие элементы первого и второго инверторных блоков приводят в действие с помощью последовательных управляющих сигналов таким образом, что соответствующие величины тока, выдаваемые первым и вторым инверторными блоками при выработке синфазной выходной мощности, сбалансированы. Последовательные управляющие сигналы для одного или обоих из первого и второго инверторных блоков могут быть отрегулированы с использованием определенного значения смещения для драйвера управления затвором. Последовательные управляющие сигналы также могут побуждать первый и второй инверторные блоки производить требуемый результат этих управляющих сигналов. Способ 400 заканчивается после завершения блока 425.
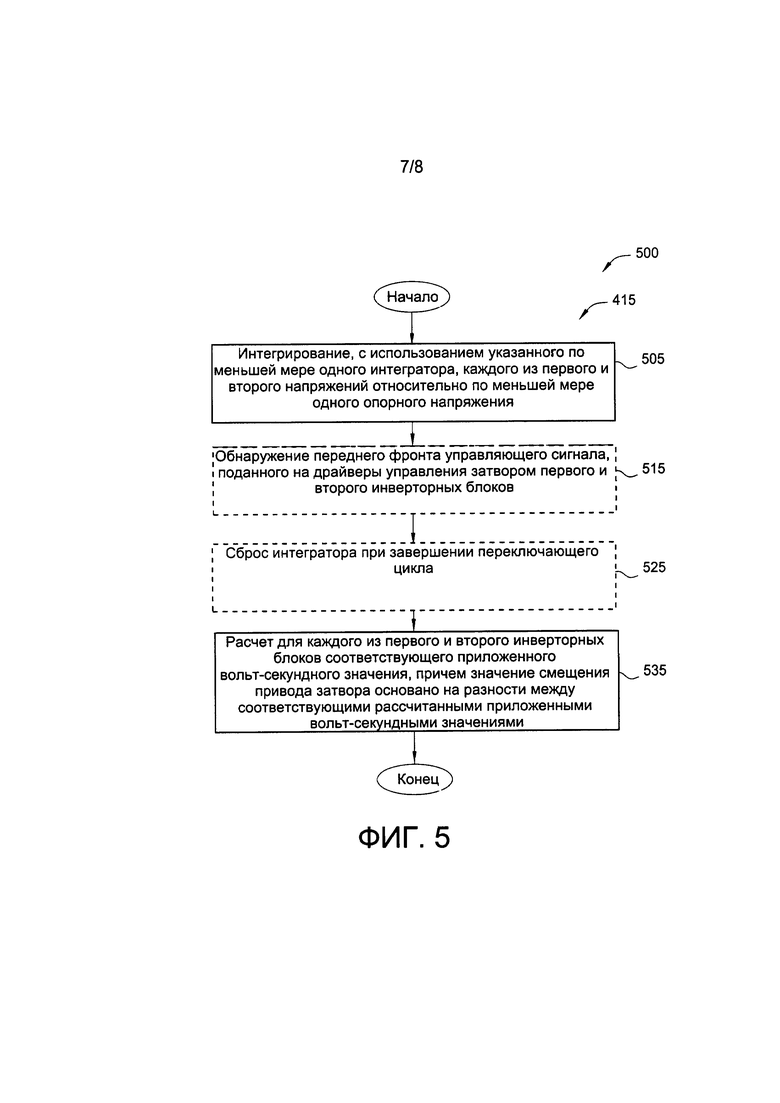
[0062] На фиг. 5 и 6 показаны способы определения значения смещения для драйвера управления затвором в соответствии с одним примером. Каждый из способов 500 и 600 представляет возможную реализацию блока 415 способа 400, в котором определяют значение смещения для драйвера управления затвором на основании соответствующих первого и второго напряжений на первом и втором узлах выходной фазы соответствующих первого и второго инверторных блоков.
[0063] Способ 500 начинается в блоке 505, где указанный по меньшей мере один интегратор, соединенный с первым и вторым узлом выходной фазы, интегрирует каждое из первого и второго напряжений относительно по меньшей мере одного опорного напряжения. Опорные напряжения могут быть на шинах источника напряжения, выполненных с возможностью питания инверторных блоков. В необязательных блоках 515 и 525 обнаруживают передний фронт для сигнала управления, поданного на драйверы управления затвором первого и второго инверторных блоков. При завершении переключающего цикла, на который указывает обнаруженный передний фронт, интегратор сбрасывают. В альтернативных примерах может быть использован задний фронт сигнала управления или отдельный сигнал управления, выполненный с возможностью сброса интегратора. В блоке 535 системный контроллер рассчитывает соответствующие приложенные вольт-секундные значения для каждого из первого и второго инверторных блоков. Значения смещения для драйвера управления затвором основаны на разности между соответствующими расчетными приложенными вольт-секундными значениями. Способ 500 заканчивается после завершения блока 505.
[0064] Способ 600 в целом применяется к варианту реализации, имеющему множество интеграторов, соединенных с конкретным узлом выходной фазы, как показано на фиг. 3С. Например, узел выходной фазы первого инверторного блока может иметь первую пару интеграторов, и узел выходной фазы второго инверторного блока может иметь вторую пару интеграторов. Способ 600 начинается в блоке 605, где во время первого переключающего цикла первого и второго инверторных блоков первый интегратор интегрирует каждое из первого и второго напряжений. В необязательном блоке 615 при завершении первого переключающего цикла, например, на основании обнаруженного переднего или заднего фронта сигнала управления, первый интегратор сбрасывают. В блоке 625 во время второго переключающего цикла первого и второго инверторных блоков второй интегратор интегрирует каждое из первого и второго напряжений. Блоки 615 и 625 могут по меньшей мере частично перекрываться по времени таким образом, что измерение указанных напряжений может быть по существу непрерывным несмотря на периодический сброс первого интегратора. В необязательном блоке 635 при завершении первого переключающего цикла второй интегратор сбрасывают. Способ 600 заканчивается после завершения блока 635. В альтернативном примере способ 600 повторяется, возвращаясь из блока 635 в блок 605. В этом случае блоки 635 и 605 могут по меньшей мере частично перекрываться по времени.
[0065] Описание различных примеров осуществления настоящего изобретения было представлено с целью иллюстрации, но не предназначено быть исчерпывающим или ограничительным до этих раскрытых примеров. Специалистам в данной области техники будут очевидны многие модификации и изменения без отступления от сущности и объема описанных примеров. Терминология, использованная в настоящем документе, была использована для наилучшего объяснения принципов указанных примеров, практического применения или технического усовершенствования по сравнению с технологиями, обнаруженными на рынке, или для обеспечения специалистам в данной области техники возможности понимания примеров, раскрытых в настоящем документе.
[0066] Как будет очевидно специалисту в данной области техники, аспекты настоящего изобретения могут быть воплощены в виде системы, способа или компьютерного программного продукта. Соответственно, аспекты настоящего изобретения могут принимать форму полностью аппаратного примера, полностью программного примера (включая встроенное программное обеспечение, резидентное программное обеспечение, микрокод и т.д.), или пример, комбинирующий программные и аппаратные аспекты, которые могут все в целом быть названы в настоящем документе как ''схема'', ''модуль'' или ''система''. Кроме того, аспекты настоящего изобретения могут принимать форму компьютерного программного продукта, воплощенного на одном или более компьютерочитаемых носителей, на которых содержится компьютерочитаемый программный код.
[0067] Может быть использована любая комбинация из одного или более компьютерочитаемых носителей. Компьютерочитаемый носитель может являться компьютерочитаемым носителем сигнала или компьютерочитаемым носителем информации. Компьютерочитаемый носитель информации может являться, например, среди прочего электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой, аппаратом или устройством или любой подходящей комбинацией вышеизложенного. Больше специальных примеров (неисчерпывающий список) компьютерочитаемого носителя информации будут содержать следующее: электрическое соединение, имеющее один или более проводов, портативная компьютерная дискета, жесткий диск, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), стираемое программируемое постоянное запоминающее устройство (СППЗУ или флэш-память), оптическое волокно, портативное постоянное запоминающее устройство на компакт диске (CD-ROM), оптическое запоминающее устройство, магнитное запоминающее устройство или любая подходящая комбинация вышеизложенного. В контексте данного документа компьютерочитаемый носитель информации может являться любым материальным носителем, который может содержать или сохранять программу для использования посредством выполняющей инструкции системы, аппарата или устройства или в связи с ними.
[0068] Компьютерочитаемый носитель сигнала может содержать распространяемый сигнал данных с внедренным в него компьютерочитаемым программным кодом, например, в групповом спектре или в качестве части несущей волны. Такой распространенный сигнал может принимать любую из множества форм, включая среди прочего электромагнитную, оптическую или любую подходящую их комбинацию. Компьютерочитаемый носитель сигнала может являться любым компьютерочитаемым носителем, который не является компьютерочитаемым носителем информации и может передавать, распространять или транспортировать программу для использования посредством выполняющей инструкции системы, аппарата или устройства или в связи с ними.
[0069] Программный код, воплощенный на компьютерочитаемом носителе, может быть передан с использованием любого надлежащего носителя, включая среди прочего беспроводную, проводную линию связи, оптоволоконный кабель, РЧ и т.д. или любую подходящую комбинацию вышеизложенного.
[0070] Компьютерный программный код для выполнения операций для аспектов настоящего изобретения может быть написан на любой комбинации из одного или более языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Smalltalk, С++ или т.д. и обычные процедурные языки программирования, такие как язык программирования ''С'' или подобные языки программирования. Указанный программный код может полностью выполняться на пользовательском компьютере, частично на пользовательском компьютере, как автономный пакет программного обеспечения, частично на пользовательском компьютере и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть соединен с пользовательским компьютером через любой тип сети, включая локальную вычислительную сеть (ЛВС) или глобальную вычислительную сеть (WAN, wide area network), или указанное соединение может быть выполнено с внешним компьютером (например, через сеть Интернет с использованием поставщика услуг в сети Интернет).
[0071] Аспекты настоящего изобретения описаны выше со ссылкой на изображения блок-схем и/или структурных схем способов, устройств (систем) и компьютерных программных продуктов в соответствии с примерами настоящего изобретения. Будет понятно, что каждый блок этих изображений блок-схем и/или структурных схем и комбинации блоков изображений блок-схем и/или структурных схем могут быть реализованы посредством команд компьютерной программы. Эти команды компьютерной программы могут быть поданы на процессор компьютера общего назначения, специализированного компьютера или другое программируемое устройство для обработки данных для получения машины таким образом, что указанные команды при выполнении посредством процессора компьютера или другого программируемого устройства для обработки данных создают средства для реализации функций/действий, указанных в блоке или блоках блок-схемы и/или структурной схемы.
[0072] Эти команды компьютерной программы также могут храниться на компьютерочитаемом носителе, который может управлять компьютером, другим программируемым устройством для обработки данных или другим устройством для функционирования определенным образом, так что команды, хранящиеся на компьютерочитаемом носителе, производят изделие, включая команды, которые реализуют функцию/действие, указанные в блоке или блоках блок-схемы и/или структурной схемы.
[0073] Команды компьютерной программы также могут быть загружены на компьютер, другое программируемое устройство для обработки данных или другие устройства для того, чтобы вызвать выполнение на компьютере, другом программируемом устройстве или других устройствах серии операционных этапов для получения реализованного посредством компьютера процесса таким образом, что команды при выполнении на компьютере или другом программируемом устройстве обеспечивают процессы для реализации функций/действий, указанных в блоке или блоках блок-схемы и/или структурной схемы.
[0074] Блок-схема и структурные схемы на чертежах иллюстрируют архитектуру, функциональность и работу возможных реализаций систем, способов и компьютерных программных продуктов в соответствии с различными примерами настоящего изобретения. В связи с этим, каждый блок в блок-схеме или структурных схемах может представлять модуль, сегмент или часть команд, которые содержат одну или более исполняемых команд для реализации указанной логической функции (функций). В некоторых альтернативных реализациях функции, обозначенные в блоке, могут происходить вне порядка, обозначенного на чертежах. Например, два блока, показанные последовательно, могут фактически быть выполнены по существу одновременно, или блоки могут иногда быть выполнены в обратном порядке в зависимости от содержащейся функциональности. Следует также отметить, что каждый блок структурных схем и/или изображения блок-схемы и комбинации блоков в структурных схемах и/или изображении блок-схемы могут быть реализованы с помощью специализированных систем на основе аппаратного обеспечения, которые выполняют указанные функции или действия или выполняют комбинации специализированных аппаратных и компьютерных команд.
[0075] Хотя вышеизложенное направлено на примеры настоящего изобретения, могут быть разработаны другие и дополнительные примеры настоящего изобретения без отступления от основного его объема, а объем настоящего изобретения определяется последующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫРАВНИВАНИЕ ТОКОВ В СИСТЕМЕ ПАРАЛЛЕЛЬНЫХ МОДУЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2017 |
|
RU2735355C2 |
| СТРУКТУРА ПАРАЛЛЕЛЬНОГО МОДУЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ | 2015 |
|
RU2701157C2 |
| ИНВЕРТОРНЫЙ ГЕНЕРАТОР | 2012 |
|
RU2515474C2 |
| ЭНЕРГОРАСПРЕДЕЛИТЕЛЬНАЯ СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ЭНЕРГОРАСПРЕДЕЛЕНИЕМ В МОДУЛЬНОЙ СИСТЕМЕ ПРЕОБРАЗОВАТЕЛЕЙ С ИСПОЛЬЗОВАНИЕМ РЕЗУЛЬТАТОВ РАСЧЕТА КОЭФФИЦИЕНТА ПОЛЕЗНОГО ДЕЙСТВИЯ (ВАРИАНТЫ) | 2017 |
|
RU2743297C2 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДВИГАТЕЛЯ | 2016 |
|
RU2678834C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2003 |
|
RU2257663C2 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ОБЕСПЕЧЕНИЯ ПАРАЛЛЕЛЬНОЙ РАБОТЫ ДЛЯ ИНВЕРТОРНОГО ГЕНЕРАТОРА | 2012 |
|
RU2518905C2 |
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА ДЛЯ ТУРБИНЫ/ГЕНЕРАТОРА ПЕРЕМЕННОГО ТОКА НА ОБЩЕМ ВАЛУ | 1997 |
|
RU2224352C2 |
| ИНВЕРТОРНОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ | 2011 |
|
RU2533167C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2395410C1 |

Группа изобретений относится к области управления мощностью, подаваемой на двигатели самолёта. Техническим результатом является снижение числа используемых контроллеров и потерь на высоких мощностях. Для обеспечения балансировки тока между параллельно соединенными первым и вторым инверторными блоками системы модульного преобразователя системный контроллер выполнен с возможностью определения значения смещения для драйвера управления затвором на основании соответствующих напряжений на узлах выходной фазы первого и второго инверторных блоков. Системный контроллер управляет драйверами управления затвором для инверторных блоков на основании значения смещения для драйвера управления затвором. Драйверы управления затвором приводят в действие первый и второй инверторные блоки с помощью последовательных управляющих сигналов таким образом, что величины тока, выдаваемые первым и вторым инверторными блоками при выработке синфазной выходной мощности, сбалансированы. 3 н. и 17 з.п. ф-лы, 9 илл.
1. Способ (400) управления выходной мощностью системы (100, 200) модульного преобразователя, содержащей множество параллельных инверторных блоков (125), которое содержит первый инверторный блок (125А) по меньшей мере с первым узлом (340-1) выходной фазы и второй инверторный блок (125В) по меньшей мере со вторым узлом (340-4) выходной фазы, причем способ включает:
приведение (405) в действие переключающих элементов (330-1, 330-2) первого и второго инверторных блоков с помощью начальных управляющих сигналов (326-1, 326-2) для получения синфазной выходной мощности (215-1);
определение (415) значения (310) смещения для драйвера управления затвором на основании соответствующих первого и второго напряжений на первом и втором узлах выходной фазы и
приведение (425) в действие, на основании определенного значения смещения для драйвера управления затвором, переключающих элементов первого и второго инверторных блоков с помощью последовательных управляющих сигналов (326-1, 326-2) таким образом, что соответствующие величины тока, выдаваемого первым и вторым инверторными блоками при выработке синфазной выходной мощности, сбалансированы.
2. Способ по п. 1, согласно которому
определение значения смещения для драйвера управления затвором включает:
расчет (535) для каждого из первого и второго инверторных блоков соответствующего приложенного вольт-секундного значения (312),
причем значение смещения для драйвера управления затвором основано на разности между соответствующими рассчитанными приложенными вольт-секундными значениями.
3. Способ по п. 1, согласно которому
каждый из первого и второго узлов выходной фазы соединен по меньшей мере с одним интегратором (335-1, 335-2) системы модульного преобразователя,
причем определение значения смещения для драйвера управления затвором включает:
интегрирование (505), с использованием указанного по меньшей мере одного интегратора, каждого из первого и второго напряжений относительно по меньшей мере одного опорного напряжения (VDC+, VDC-).
4. Способ по п. 3, согласно которому
указанное по меньшей мере одно опорное напряжение содержит системную землю.
5. Способ по п. 3, согласно которому
интегрирование каждого из первого и второго напряжений выполняют во время переключающего цикла первого и второго инверторных блоков, а указанный способ дополнительно включает:
сброс (525) указанного интегратора при завершении переключающего цикла.
6. Способ по п. 5, согласно которому
сброс интегратора выполняют при обнаружении (515) переднего фронта сигнала (345А, 345В) управления, поданного на драйверы управления затвором первого и второго инверторных блоков.
7. Способ по п. 3, согласно которому
указанный по меньшей мере один интегратор содержит первый и второй интеграторы (335А, 335В), а указанный способ дополнительно включает:
интегрирование (605), во время первого переключающего цикла первого и второго инверторных блоков, каждого из первого и второго напряжений с использованием первого интегратора; и
интегрирование (625), во время второго переключающего цикла первого и второго инверторных блоков, каждого из первого и второго напряжений с использованием второго интегратора.
8. Система (100, 200) модульного преобразователя, содержащая:
- системный контроллер (105) и
- по меньшей мере первый и второй инверторные блоки (125А, 125В), соединенные параллельно и выполненные с возможностью получения синфазной выходной мощности (215-1, 215-2, 215-3),
причем каждый инверторный блок из первого и второго инверторных блоков соответственно содержит:
пару переключающих элементов (330-1, 330-2), между которыми расположен узел (340) выходной фазы; и
пару драйверов (325-1, 325-2) управления затвором, каждый из которых выполнен с возможностью приема соответствующего сигнала (345А, 345В) управления от системного контроллера и выработки управляющего сигнала (326-1, 326-2) для управления переключением соответствующего элемента из указанной пары переключающих элементов;
причем системный контроллер выполнен с возможностью:
определения значения (310) смещения для драйвера управления затвором на основании соответствующих напряжений на узлах выходной фазы первого и второго инверторных блоков и
управления, на основании определенного значения смещения для драйвера управления затвором, драйверами управления затвором с использованием первого и второго инверторных блоков с помощью последовательных управляющих сигналов (326-1, 326-2) таким образом, что величины тока, выдаваемого первым и вторым инверторными блоками при выработке синфазной выходной мощности, сбалансированы.
9. Система модульного преобразователя по п. 8, в которой системный контроллер дополнительно выполнен с возможностью расчета для каждого из первого и второго инверторных блоков соответствующего приложенного вольт-секундного значения (312),
причем значение смещения для драйвера управления затвором основано на разности между соответствующими рассчитанными приложенными вольт-секундными значениями.
10. Система модульного преобразователя по п. 8, дополнительно содержащая:
один или более первых интеграторов (335-1, 335-2), соединенных с узлом выходной фазы первого инверторного блока; и
один или более вторых интеграторов (335-1, 335-2), соединенных с узлом выходной фазы второго инверторного блока;
причем определение значения смещения для драйвера управления затвором включает:
интегрирование, с использованием указанных одного или более первых интеграторов и указанных одного или более вторых интеграторов, каждого из первого и второго напряжений относительно по меньшей мере одного опорного напряжения (VDC+, VDC-).
11. Система модульного преобразователя по п. 10, в которой указанное по меньшей мере одно опорное напряжение содержит системную землю.
12. Система модульного преобразователя по п. 10, в которой интегрирование каждого из первого и второго напряжений происходит во время переключающего цикла первого и второго инверторных блоков;
причем системный контроллер дополнительно выполнен с возможностью сброса указанных одного или более первых интеграторов и указанных одного или более вторых интеграторов при завершении переключающего цикла.
13. Система модульного преобразователя по п. 12, в которой сброс указанных одного или более первых интеграторов и указанных одного или более вторых интеграторов происходит при обнаружении переднего фронта сигнала (345А, 345В) управления, поданного на пару драйверов управления затвором каждого из первого и второго инверторных блоков.
14. Система модульного преобразователя по п. 10, в которой указанные один или более первые интеграторы содержат первое множество интеграторов (335А, 335В), а указанные один или более вторые интеграторы содержат второе множество интеграторов (335А, 335В),
причем по меньшей мере один интегратор из каждого из первого множества и второго множества интеграторов выполнен с возможностью интегрирования соответствующего первого и второго напряжений во время первого переключающего цикла первого и второго инверторных блоков, и
по меньшей мере другой интегратор из каждого из первого множества и второго множества интеграторов выполнен с возможностью интегрирования соответствующего первого и второго напряжений во время второго переключающего цикла первого и второго инверторных блоков.
15. Некратковременный компьютерочитаемый носитель, содержащий компьютерный программный код, который при выполнении посредством работы одного или более компьютерных процессоров выполняет операцию управления выходной мощностью системы (100, 200) модульного преобразователя, содержащей множество параллельных инверторных блоков (125), причем
указанное множество содержит первый инверторный блок (125А) по меньшей мере с первым узлом (340-1) выходной фазы и второй инверторный блок (125В) по меньшей мере со вторым узлом (340-4) выходной фазы,
а указанная операция включает:
осуществление связи с множеством драйверов (325-1, 325-2) управления затвором для приведения (405) в действие переключающих элементов (330-1, 330-2) первого и второго инверторных блоков с помощью начальных управляющих сигналов (326-1, 326-2) для получения синфазной выходной мощности (215-1);
определение (415) значения (310) смещения для драйвера управления затвором на основании соответствующих первого и второго напряжений на первом и втором узлах выходной фазы и
осуществление связи с указанным множеством драйверов управления затвором для приведения (425) в действие, на основании определенного значения смещения для драйвера управления затвором, переключающих элементов первого и второго инверторных блоков с помощью последовательных управляющих сигналов (326-1, 326-2) таким образом, что соответствующие величины тока, выдаваемого первым и вторым инверторными блоками при выработке синфазной выходной мощности, сбалансированы.
16. Компьютерочитаемый носитель по п. 15, в котором
определение значения смещения для драйвера управления затвором включает:
расчет (535) для каждого из первого и второго инверторных блоков соответствующего приложенного вольт-секундного значения (312),
причем значение смещения для драйвера управления затвором основано на разности между соответствующими рассчитанными приложенными вольт-секундными значениями.
17. Компьютерочитаемый носитель по п. 15, в котором
каждый из первого и второго узлов выходной фазы соединен по меньшей мере с одним интегратором (335-1, 335-2) системы модульного преобразователя, причем определение значения смещения для драйвера управления затвором включает:
интегрирование (505) с использованием указанного по меньшей мере одного интегратора каждого из первого и второго напряжений относительно по меньшей мере одного опорного напряжения (VDC+, VDC-).
18. Компьютерочитаемый носитель по п. 17, в котором
интегрирование каждого из первого и второго напряжений происходит во время переключающего цикла первого и второго инверторных блоков, а указанная операция дополнительно включает:
сброс (525) указанного интегратора при завершении переключающего цикла.
19. Компьютерочитаемый носитель по п. 18, в котором
сброс интегратора происходит при обнаружении (515) переднего фронта сигнала (345А, 345В) управления, поданного на драйверы управления затвором первого и второго инверторных блоков.
20. Компьютерочитаемый носитель по п. 17, в котором
указанный по меньшей мере один интегратор содержит первый и второй интеграторы (335А, 335В), а указанная операция дополнительно включает:
интегрирование (605), во время первого переключающего цикла первого и второго инверторных блоков, каждого из первого и второго напряжений с использованием первого интегратора; и
интегрирование (625), во время второго переключающего цикла первого и второго инверторных блоков, каждого из первого и второго напряжений с использованием второго интегратора.
| US 20070259545 A1, 08.11.2007 | |||
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА ЗАПУСКА ДВИГАТЕЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2525836C2 |
| ЭЛЕКТРОПИТАНИЕ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2564401C2 |
| УСТРОЙСТВО ЭЛЕКТРОПИТАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2432302C2 |
| US 9209721 B2, 08.12.2015. | |||

