УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение в целом относится к управлению энергопотреблением, в частности к управлению энергораспределением от множества параллельных инверторов в модульной архитектуре преобразователей с использованием результатов расчета коэффициента полезного действия. Современные транспортные средства, такие как летательный аппарат, используют большое количество электронных устройств, двигателей, нагревателей и другого оборудования с электрическим приводом. В частности, электродвигатели повсеместно используют в современных транспортных средствах для привода любого оборудования от гидравлических насосов до вентиляторов салона. Обычно каждый из этих электродвигателей приводят в действие независимым контроллером двигателя. Размеры каждого контроллера двигателя обеспечивают проведение максимального тока, необходимого для питания своего соответствующего двигателя на полной мощности в течение продолжительного периода времени (при этом контроллер двигателя, как правило, дополнительно имеет некий запас по производительности для обеспечения безопасности) без перегрева или неисправности.
В результате, летательный аппарат несет несколько устройств контроллеров двигателя, каждый из которых обычно имеет слишком большой размер и недостаточно используется большую часть времени. Иными словами, контроллер двигателя имеет мощность, достаточную для запуска двигателя на полной мощности в течение продолжительного периода времени плюс запас обеспечения безопасности, однако двигатели редко работают на полной мощности, или вообще никогда. Причина состоит в том, что сами двигатели имеют некоторый заложенный в них запас обеспечения безопасности, в и потому, что основную часть времени двигатели работают в режиме низкой нагрузки (например, вентилятор салона не всегда включен на максимальную производительность). Кроме того, некоторые двигатели используются только время от времени или в течение конкретных этапов полета и не используются оставшуюся часть времени. В итоге, многие из самолетных комплектующих в тяжелых дорогостоящих устройствах контроллеров двигателя большую часть своего срока эксплуатации оказываются либо незадействованными, либо работающими на уровне, значительно меньшем, чем позволяют их номинальные выходные мощности.
Для улучшения использования потенциала устройства управления двигателем модульная система преобразователей может обеспечить множество модульных назначаемых динамически перенастраиваемых устройств контроллеров двигателя, которые могут работать сами по себе или параллельно с другими параллельными устройствами контроллеров двигателя для удовлетворения потребностям в управлении мощностью. При необходимости, система преобразователей соединяет одно или более включенных параллельно управляющих устройств с каждой активной электрической нагрузкой в летательном аппарате для обеспечения соответствия имеющимся значениям потребляемой мощности. Увеличение использования устройств контроллеров двигателя может обеспечить соответствующее снижение веса и стоимости системы.
Во время работы модульной системы преобразователей множество инверторов могут быть включены параллельно для подачи энергии питания на электродвигатель или другую электрическую нагрузку. Обычно количество параллельных инверторов, используемых для приведения в действие конкретной электрической нагрузки, основано исключительно на потребляемой мощности электрической нагрузки и номинальной мощности В одном из вариантов реализации предложен способ управления энергораспределением от множества инверторов на одну или более нагрузок. Способ включает определение, с использованием одного или более компьютерных процессоров, множества возможных комбинаций из множества инверторов для удовлетворения требованиям по нагрузке, соответствующим указанным одной или более нагрузкам. Каждая возможная комбинация из множества возможных комбинаций содержит соответствующий набор, образованный из одного или более инверторов из множества инверторов. Способ также включает осуществление доступа, из памяти, соединенной с одним или более компьютерными процессорами, к одной или более заданным функциям коэффициента полезного действия, связанным с указанными одним или более инверторами, а также выбор, на основании указанных одной или более заданных функций коэффициента полезного действия, комбинации из множества возможных комбинаций. Способ также включает передачу управляющих сигналов в набор из одного или более инверторов, соответствующих выбранной комбинации, с обеспечением подачи энергии питания на указанные одну или более нагрузок.
Еще в одном варианте реализации предложена энергораспределительная система для подачи энергии питания на одну или более нагрузок. Энергораспределительная система содержит множество инверторов и контроллер, содержащий один или более процессоров. Контроллер выполнен с возможностью определения множества возможных комбинаций из множества инверторов для удовлетворения требованиям по нагрузке, соответствующим указанным одной или более нагрузкам. Каждая возможная комбинация из множества возможных комбинаций содержит соответствующий набор, образованный из одного или более инверторов из множества инверторов. Контроллер также выполнен с возможностью осуществления доступа, из памяти, соединенной с указанными одним или более компьютерными процессорами, одной или более заданным функциям коэффициента полезного действия, связанных с указанными одним или более инверторов, и возможностью выбора, на основании указанных одной или более заданных функций коэффициента полезного действия, комбинации из множества возможных комбинаций. Контроллер также выполнен с возможностью передачи управляющих сигналов в набор из одного или более инверторов, соответствующих выбранной комбинации, с обеспечением подачи энергии питания на указанные одну или более нагрузок.
Еще в одном варианте реализации предложен способ управления энергораспределением от множества инверторов на одну или более нагрузок. Способ включает определение, с использованием одного или более компьютерных процессоров, множества возможных комбинаций из множества инверторов для удовлетворения требованиям по нагрузке, соответствующим указанным одной или более нагрузкам. Каждая возможная комбинация из множества возможных комбинаций содержит соответствующий набор, образованный из одного или более инверторов из множества инверторов. Способ также включает осуществление доступа из памяти, соединенной с указанными одним или более компьютерными процессорами, к одной или более заданным функциям коэффициента полезного действия, связанным с указанными одним или более инверторами, и назначение, для каждой возможной комбинации из множества возможных комбинаций, соответствующего приоритета на основании сводного коэффициента полезного действия указанных одного или более инверторов из соответствующего набора. Способ также включает выбор комбинации из множества возможных комбинаций на основании соответствующего приоритета, а также передачу управляющих сигналов в набор из одного или более инверторов, соответствующих выбранной комбинации, с обеспечением подачи энергии питания на указанные одну или более нагрузок.
Описанные признаки, функции и преимущества могут быть обеспечены независимо друг от друга в различных вариантах реализации или могут быть объединены еще в одних вариантах реализации, дополнительные сведения о которых можно найти в приведенном ниже описании и на приведенных ниже чертежах.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
С тем, чтобы обстоятельно понять приведенные выше признаки настоящего изобретения, более конкретное описание настоящего изобретения, приведенное выше в сокращенной форме, может быть получено со ссылкой на варианты реализации, некоторые из которых показаны на прилагаемых чертежах. Однако, следует отметить, что прилагаемые чертежи иллюстрируют только обычные варианты реализации настоящего изобретения, так что их не следует считать ограничением объема настоящего изобретения, при этом настоящее изобретение может допускать иные в равной степени эффективные варианты реализации.
На фиг. 1 показан пример модульной системы преобразователей согласно одному из вариантов реализации.
На фиг. 2 показана структурная схема примера контроллера для расчета коэффициента полезного действия для модульной системы преобразователей согласно одному из вариантов реализации.
На фиг. 3 показан график, иллюстрирующий пример функции коэффициента полезного действия инвертора согласно одному из вариантов реализации.
На фиг. 4 показан пример способа управления энергораспределением от множества инверторов на одну или более нагрузок согласно одному из вариантов реализации.
На фиг. 5, 6 и 7 показаны примеры способов выбора комбинации инверторов на основании одной или более заданных функций коэффициента полезного действия согласно различным вариантам реализации.
На фиг. 8 показан пример способа управления энергораспределением от множества инверторов на одну или более нагрузок согласно одному из вариантов реализации.
Для облегчения понимания там, где это возможно, для обозначения схожих элементов на чертежах были использованы идентичные ссылочные номера. Предполагается, что элементы, раскрытые в одном из вариантов реализации, могут быть эффективно использованы в отношении иных вариантов реализации без указания на них специальным образом. Не следует понимать, что изображения, на которые приведены ссылки в данном документе, показаны в масштабе, если только специально не указано иное. Кроме того, в целях упрощения пояснений и иллюстраций чертежи часто приведены в упрощенной форме, при этом могут быть опущены некоторые подробные сведения или некоторые компоненты. Чертежи и описание служат для пояснения описанных ниже принципов, при этом схожие элементы указаны с использованием схожих обозначений.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Для улучшения эффективности использования множества параллельных инверторов в модульной конструкции из инверторов для подачи энергии питания на одну или более электрических нагрузок, контроллер выбирает комбинацию инверторов из множества возможных комбинаций на основании одной или более заданных функций коэффициента полезного действия, связанных с указанным множеством параллельных инверторов. В некоторых вариантах реализации контроллер выбирает комбинацию на основании определенных значений общих потерь мощности для каждой из множества возможных комбинаций. В некоторых вариантах реализации контроллер выбирает комбинацию на основании определенных значений (сводного) коэффициента полезного действия для каждой из множества возможных комбинаций. В некоторых вариантах реализации множество возможных комбинаций ранжируют посредством определенных значений коэффициента полезного действия, и им назначают относительный приоритет. В некоторых вариантах реализации контроллер выбирает комбинацию согласно заданной функции стоимости, которая учитывает определенные значения коэффициента полезного действия, значения общих потерь мощности и/или назначенный относительный приоритет.
В некоторых вариантах реализации контроллер выполнен с возможностью динамического обновления выбранной комбинации инверторов на основании изменения в способности по меньшей мере одного инвертора из набора, образованного из одного или более инверторов, соответствующих выбранной комбинации, вырабатывать энергию и/или изменения требований по нагрузке к одной или более нагрузок. Таким образом, модульная конструкция из преобразователей в целом выполнена с возможностью увеличения использования контроллеров двигателя и других электрических нагрузок, что в результате может привести к уменьшению веса и стоимости всей системы.
Согласно фиг. 1, модульная система 100 преобразователей управляет множеством включенных параллельно инверторов 125, которые выполнены с возможностью привода одной или более электрических нагрузок 135. Инверторы 125 могут содержать, например и без ограничения, любые из биполярных транзисторов с изолированным затвором (IGBT), полевых транзисторов со структурой металл-оксид-полупроводник (MOSFET) и биполярных плоскостных транзисторов (BJT). Электрические нагрузки 135 могут содержать многочисленные типы и/или различные типы электрических машин переменного тока или постоянного тока, таких как электродвигатели. Как показано, множество инверторов 125 содержит пять (5) инверторов 125-1, 125-2, 125-3, 125-4, 125-5, а указанные одна или более электрических нагрузок 135 содержат три (3) нагрузки 135-1, 135-2, 135-3, однако другие реализации могут содержать иное количество инверторов 125 и/или электрических нагрузок 135.
Каждый инвертор 125 принимает выходной сигнал мощности (представлен как напряжение VDC постоянного тока) на входном узле 120, который является общим для множества инверторов 125. Другие реализации могут иметь множество различных входных сигналов (например, напряжения постоянного тока, имеющие различные величины), выдаваемых на выбранные инверторы 125. Каждый инвертор 125 генерирует на выходе запрашиваемую мощность переменного тока (например, имеющую запрашиваемые уровень напряжения, частоту, форму волны и т.д.) на основании принятого входного сигнала и на основании сигналов 140 управления инвертором, выдаваемых контроллером 115 параллельного управления. В некоторых вариантах реализации каждый из множества инверторов 125 являются по существу одинаковыми (например, имеют одну и ту же модель, имеющую по существу идентичные расчетные электрические параметры и/или другие электрические характеристики). В иных вариантах реализации множество инверторов 125 содержит по меньшей мере два разных инвертора 125.
Обычно на каждую электрическую нагрузку 135 подают энергию питания с использованием выбранных одного или более из множества инверторов 125. В некоторых вариантах реализации один или более инверторов 125 выбирают с использованием сигналов 145 управления коммутацией, генерируемых контроллером 115 параллельного управления, и применяют к динамически перенастраиваемой коммутационной схеме 130, включенной между инверторами 125 и электрическими нагрузками 135. Коммутационная схема 130 может быть реализована с использованием любых подходящих коммутационных элементов, показанных в виде выключателей питания 130-1, 130-2, 130-3, 130-4, 130-5. Некоторые неограничивающие примеры выключателей 130-1, 130-2, 130-3, 130-4, 130-5 питания содержат твердотельные реле, механические реле, транзисторы и другие управляемые выключатели питания. Контроллер 115 параллельного управления управляет работой каждого выключателя 130-1, 130-2, 130-3, 130-4, 130-5 питания с использованием сигналов 145 управления коммутацией, примененных к коммутационной схеме 130. Несмотря на то, что показаны пять (5) выключателей 130-1, 130-2, 130-3, 130-4, 130-5 питания, соответствующих пяти (5) инверторам 125, различные реализации могут содержать иное количество выключателей питания в коммутационной схеме 130. Кроме того, в некоторых вариантах реализации коммутационная схема 130 работает в качестве цепи короткого замыкания и/или защитного устройства для защиты от сверхтоков. Например, коммутационные элементы, которые связаны с закороченной накоротко или сверхтоковой нагрузкой, выполнены с возможностью открытия при обнаружении неисправности.
В некоторых вариантах реализации контроллер 115 параллельного управления выполнен с возможностью динамической перенастройки коммутационной схемы 130 для обеспечения в реальном времени подходящего количества включенных параллельно инверторов 125 для привода электрической нагрузки 135. Другими словами, когда потребляемая мощность для конкретной электрической нагрузки 135 увеличивается, контроллер 115 параллельного управления может передавать обновленные сигналы 145 управления коммутацией, которые вызывают то, что коммутационная схема 130 параллельно включает дополнительные инверторы 125 для обеспечения соответствия повышенному значению потребляемой мощности. И наоборот, когда потребляемая мощность электрической нагрузки 135 уменьшается, контроллер 115 параллельного управления может передавать обновленные сигналы 145 управления коммутацией, которые вызывают отключение коммутационной схемой 130 одного или более инверторов 125. Контроллер 115 параллельного управления может по существу включить отключенные инверторы 125 параллельно с другими инверторами 125 для привода других электрических нагрузок 135. В некоторых случаях контроллер 115 параллельного управления может передавать обновленные сигналы 145 управления коммутацией на основании определенного изменения способности по меньшей мере одного инвертора вырабатывать энергию. Например, по причине износа или по причине возникновения неисправности, способность первого инвертора 125 вырабатывать энергию может быть уменьшена или исключена (то есть, сделана нефункциональной). Контроллер 115 параллельного управления может в ответ дополнить или заменить первый инвертор 125 вторым инвертором 125, имеющим подходящую способность вырабатывать энергию, на основании потребляемой мощности электрической нагрузки 135. И наоборот, когда способность первого инвертора 125 вырабатывать энергию увеличивается, контроллер 115 параллельного управления может отключить второй инвертор 125.
В некоторых вариантах реализации контроллер 115 параллельного управления размещают и запускают на встроенном управляющем устройстве. Контроллер 115 параллельного управления может содержать, например и без ограничения, микроконтроллер, процессор, вентильную матрицу с эксплуатационным программированием (FPGA) или специализированную интегральную схему (ASIC). В некоторых вариантах реализации контроллер 115 параллельного управления использует симулятор или эмулятор реального времени или работает в реальном времени.
Преобразователь 115 параллельного управления выполнен с возможностью выдачи управляющих сигналов 140 для управления инвертором согласно одному или более заданных алгоритмов. Инверторы 125 в целом выдают на контроллер 115 параллельного управления сигналы обратной связи, такие как ток и/или напряжение, которые применяют к выбранному алгоритму или выбранным алгоритмам. В случае, в котором одна или более нагрузок 135 содержат электродвигатели, контроллер 115 параллельного управления выбирает подходящий алгоритм управления двигателем или подходящие алгоритмы управления двигателем для генерации управляющих сигналов 140 для управления инвертором. Некоторые неограничивающие примеры алгоритмов управления двигателями содержат управление с ориентацией по полю (FOC), прямое управление крутящим моментом (DTC) и управление напряжением по частоте (V/F). Различные алгоритмы управления двигателями могут быть полезны для эффективного привода двигателей различных типов соответствующего транспортного средства (например, индукционные двигатели, синхронные двигатели, синхронные двигатели с постоянными магнитами, бесщеточные двигатели постоянного тока и т.д.). Например, обычный летательный аппарат может содержать стартерный двигатель-генератор для главных двигателей (двигатель с постоянными магнитами), вентилятор с приводом от набегающего потока (индукционный двигатель), компрессорный двигатель системы контроля влияния окружающей среды (двигатель с постоянными магнитами), а также один или более синхронных двигателей, все из которых могут иметь различные требования по питанию.
Несмотря на то, что это не показано на чертежах, модульная система 100 преобразователей может дополнительно содержать программную или аппаратную управляющую коммутационную схему, которая выполнена с возможностью применения выбранного алгоритма из множества заданных алгоритмов к одному или более выбранных инверторов 125. Управляющая коммутационная схема может содержаться в контроллере 115 параллельного управления или может быть реализована отдельно от него.
В некоторых вариантах реализации модульная система 100 преобразователей содержит контроллер 110 для расчета коэффициента полезного действия, который выполнен с возможностью выбора конкретной комбинации инверторов 125 на основании информации о коэффициенте полезного действия, связанной с инверторами 125. В некоторых вариантах реализации контроллер 110 для расчета коэффициента полезного действия содержится в контроллере 115 параллельного управления. В иных вариантах реализации контроллер 110 для расчета коэффициента полезного действия содержится в отдельной интегральной схеме (IC). Системный контроллер 105 выполнен с возможностью связи с внешним устройством или внешними устройствами, такими как устройство управления транспортным средством, для получения функциональных команд от устройства управления транспортным средством и для выдачи функциональных сигналов обратной связи (например, сигналов состояния) и/или иной информации на устройство управления транспортным средством. Как показано, контроллер 110 для расчета коэффициента полезного действия принимает одно или более запросов по нагрузке (то есть, сигналы 155 требований по нагрузке) от системного контроллера 105 и выбирает относительно эффективную комбинацию инверторов 125 для обеспечения соответствия запросам по нагрузке. Контроллер 110 для расчета коэффициента полезного действия передает сигналы 150 выбора комбинации на контроллер 115 параллельного управления, которые влияют на сигналы 145 управления коммутацией и/или управляющие сигналы 140 для управления инвертором, сгенерированные контроллером 115 параллельного управления. В некоторых вариантах реализации сигналы 150 выбора комбинации содержат только информацию о комбинации (то есть, какие из множества инверторов 125 содержатся в выбранной комбинации для подачи энергии питания на конкретную электрическую нагрузку 135). В данном случае контроллер 115 параллельного управления может определить, как распределить нагрузку среди инверторов 125 из выбранной комбинации. Например, преобразователь 115 параллельного управления может распределять нагрузку равномерно среди выбранных инверторов 125. В иных вариантах реализации сигналы 150 выбора комбинации могут содержать дополнительную информацию, такую как данные о энергораспределении между инверторами 125 из выбранной комбинации.
На фиг. 2 показана одна из иллюстративных реализаций контроллера 110 для расчета коэффициента полезного действия. Контроллер 110 для расчета коэффициента полезного действия содержит процессор 205 и память 210. Процессор 205 в целом содержит любой обрабатывающий элемент, выполненный с возможностью осуществления различных функций, описанных в данном документе. Несмотря на то, что он показан как одиночный элемент в управляющем устройстве 110 для расчета коэффициента полезного действия, процессор 205 предназначен для представления одиночного процессора, множества процессоров, процессора или процессоров, имеющих множество ядер, а также их комбинаций. Память 210 может содержать множество различных компьютерочитаемых носителей, выбранных для обеспечения относительной эффективности или иных характеристик: носитель для кратковременного хранения данных и/или носитель для длительного хранения данных, съемный и/или несъемный носитель и т.д. Память 210 может содержать кэш-память, оперативное запоминающее устройство (RAM), хранилище данных и т.д. Хранилище данных, имеющееся в памяти 110, обычно обеспечивает энергонезависимую память для контроллера 110 для расчета коэффициента полезного действия, а также может содержать один или более различных запоминающих элементов, таких как флэш-память, накопитель на жестком диске, твердотельный накопитель, оптическое запоминающее устройство и/или магнитное запоминающее устройство.
Преобразователь 110 для расчета коэффициента полезного действия выполнен с возможностью определения множества возможных комбинаций 215 (комбинации 215-1, 215-2, …, 215-k) инверторов для удовлетворения требованиям по нагрузке, соответствующим одной или более электрических нагрузок. В некоторых вариантах реализации преобразователь 110 для расчета коэффициента полезного действия определяет, для конкретного запроса по нагрузке, соответствующего электрической нагрузке, минимальное количество инверторов, необходимых для соответствия требованию по мощности электрической нагрузки. Множество возможных комбинаций 215 может содержать по меньшей мере одну комбинацию, которая содержит инверторы в количестве, превышающем заданное минимальное количество.
В некоторых вариантах реализации каждая из возможных комбинаций 215 представляет назначение конкретных инверторов для подачи энергии питания на одну или более электрических нагрузок без указания количества энергии, которое должно быть выработано каждым отдельным инвертором. В одном из неограничивающих примеров первая комбинация назначает инверторы 125-1, 125-2 для подачи энергии питания на электрическую нагрузку 135-1, назначает инвертор 125-3 для подачи энергии питания на электрическую нагрузку 135-2 и назначает инвертор 125-4 для подачи энергии питания на электрическую нагрузку 135-3. Инвертор 125-5 остается неназначенным в первой комбинации и является доступным для требований к динамической нагрузке. В некоторых вариантах реализации каждая возможная комбинация 215 предполагает заданное распределение нагрузок для инверторов, содержащихся в указанной возможной комбинации 215. Например, возможная комбинация 215 может принимать на себя равную нагрузку каждого инвертора в пределах возможной комбинации 215 (то есть разделение потребляемой мощности поровну).
В иных вариантах реализации каждая из возможных комбинаций 215 представляет назначение конкретных инверторов и соответствующее распределение нагрузок. Например, первая комбинация может установить три инвертора (125-1, 125-2, 125-3) для подачи энергии питания на электрическую нагрузку согласно первому распределению нагрузок (например, каждому инвертору назначают 1/3 от потребляемой мощности), а вторая комбинация может установить те же самые три инвертора с помощью второго распределения нагрузок (например, 50% на инвертор 125-1, 25% на инвертор 125-2, и 25% на инвертор 125-3). В некоторых случаях распределение нагрузок для инверторов конкретной возможной комбинации 215 может быть выбрано на основании относительного коэффициента полезного действия инверторов на различных уровнях выработки энергии, отличных от номинальной мощности инверторов и т.д.
Для каждой из множества возможных комбинаций 215 (то есть, комбинации 215-1, 215-2, …, 215-k), контроллер 110 для расчета коэффициента полезного действия определяет значение коэффициента полезного действия η1, η2, …, ηk (то есть eta-subl, eta-sub2 и т.д.), связанное с подачей энергии питания на одну или более электрических нагрузок, с использованием комбинации 215-1, 215-2, …, 215-k). Значения η1, η2, …, ηk коэффициента полезного действия определяют на основании одной или более заданных функций 230 коэффициента полезного действия, связанных с работой каждого из инверторов, содержащихся в конкретной возможной комбинации 215-1, 215-2, …, 215-k). Обычно функции 230 коэффициента полезного действия описывают коэффициент полезного действия инвертора на конкретном уровне выработки энергии. Например, инвертор может иметь различные коммутационные потери, соответствующие различным уровням выработки энергии, что оказывает влияние на результирующий коэффициент полезного действия инвертора. Иллюстративная функция 230 коэффициента полезного действия показана на графике 300, проиллюстрированном на фиг. 3. В идеальном случае каждый инвертор, содержащийся в конкретной комбинации, будет работать при своем соответствующем максимальном значении ηmax_inv коэффициента полезного действия (то есть eta-sub(max_inv)) в функциональной точке 305. При максимальном значении ηmax_inv коэффициента полезного действия инвертор создает уровень Pηmax_inv мощности. Однако возможно, что мощность, потребляемая электрической нагрузкой (которая может динамически изменяться во время работы), не будет соответствовать уровню мощности Pηmax_inv, а один или более инверторов из конкретной комбинации будут работать далеко от максимального значения ηmax_inv коэффициента полезного действия.
Согласно фиг. 2, в некоторых вариантах реализации значение η1, η2, …, ηk коэффициента полезного действия представляет значение сводного коэффициента полезного действия - другими словами, комбинацию из множества значений коэффициента полезного действия (из функций 230 коэффициента полезного действия), связанных с конкретными инверторами. Например, если конкретная возможная комбинация 215 содержит три электрически идентичных инвертора при том же самом уровне мощности (что в результате приводит к тому, что каждый инвертор работает с тем же самым значением ηinv коэффициента полезного действия) (то есть, eta-sub(inv)), значение сводного коэффициента полезного действия комбинации представляло бы собой мультипликативный результат различных значений коэффициента полезного действия или (ηinv)3. В иных примерах инверторы могут иметь различные электрические свойства и/или могут работать на различных уровнях мощности, так что определенное значение сводного коэффициента полезного действия рассчитывают с использованием более сложных арифметических функций (например, взвешенной комбинации значений коэффициента полезного действия инвертора).
В некоторых вариантах реализации контроллер 110 для расчета коэффициента полезного действия определяет наиболее эффективную комбинацию 220 из множества возможных комбинаций 215, причем наиболее эффективная комбинация 220 соответствует максимальному значению ηmax коэффициента полезного действия из множества значений η1, η2, …, ηk коэффициента полезного действия. В некоторых случаях наиболее эффективная комбинация 220 может быть выбрана в качестве выбранной комбинации 225 для подачи энергии питания на конкретную электрическую нагрузку, однако это не является требованием. Например, в случаях технического обеспечения, отладки или каких-либо вынужденных сценариев работы выбранная комбинация 225 может быть менее эффективной по сравнению с наиболее эффективной комбинацией 220. В некоторых вариантах реализации одна или более внешних систем, таких как система управления полетом, могут быть выполнены с возможностью корректировки выбранной комбинации 225.
В некоторых вариантах реализации контроллер 110 для расчета коэффициента полезного действия определяет соответствующий приоритет 2351, 2352, …, 235k), (то есть 235-sub1, 235-sub2 и т.д.) для каждой возможной комбинации из множества возможных комбинаций 215 на основании множества значений η1, η2, …, ηk коэффициента полезного действия. Например, при использовании к возможных комбинаций 215, наиболее эффективной комбинации 220 может быть назначен наивысший приоритет (например, приоритет, равный 1), а наименее эффективной комбинации из множества комбинаций 215 может быть назначен наименьший приоритет (например, приоритет, равный k). В некоторых вариантах реализации значения относительного приоритета для различных возможных комбинаций 215 учитывают при выборе выбираемой комбинации 225 согласно заданной функции 240 стоимости. Например, на выбор одной из возможных комбинаций 215, которая не является наиболее эффективной комбинацией 220, может быть наложен штраф путем применения значений приоритета к заданному вектору 245 весовых коэффициентов, имеющихся в заданной функции 240 стоимости.
Кроме того, в некоторых вариантах реализации контроллер 110 для расчета коэффициента полезного действия определяет значение Ploss, 1, Ploss, 2, …, Ploss, k потери мощности (то есть P-sub(loss, 1), P-sub(loss-2) и т.д.) для каждой возможной комбинации из множества возможных комбинаций 215. Значение Ploss, 1, Ploss, 2, …, Ploss, k потери мощности может быть основано на множестве значений η1, η2, …, ηk коэффициента полезного действия. Для наиболее эффективной комбинации 220, минимальное значение Ploss, min потери мощности (то есть P-sub(loss, min)) определяют посредством контроллера 110 для расчета коэффициента полезного действия. В некоторых вариантах реализации заданная функция 240 стоимости учитывает разницу между значением Ploss, 1, Ploss, 2, …, Ploss, k потери мощности и минимальным значением Ploss, min потери мощности при выборе выбираемой комбинации 225. В одном из неограничивающих примеров заданная функция 240 стоимости содержит смешанно-целочисленную квадратичную функцию, которая учитывает заданный вектор 245 весовых коэффициентов в качестве члена первого порядка и учитывает сумму разниц в потери мощности, возведенных в квадрат, в качестве члена второго порядка. Ниже со ссылкой на фиг. 8 описан более подробно один из примеров смешанно-целочисленной квадратичной функции как заданной функции 240 стоимости. В иных вариантах реализации заданная функция 240 стоимости может представлять собой любую подходящую функцию, основанную на одном или более значений коэффициента полезного действия η1, η2, …, ηk, значениях потери мощности Ploss, 1, Ploss, 2, …, Ploss, k и приоритетах 2351-235k.
В некоторых вариантах реализации контроллер 110 для расчета коэффициента полезного действия применяет заданную функцию 240 стоимости для определения стоимости 2501, 2502, …, 250k каждой возможной комбинации из множества возможных комбинаций 215. В данном случае контроллер 110 для расчета коэффициента полезного действия определяет, какое из значений 2501, 2502, …, 250k стоимости соответствует минимальному значению 250min стоимости, и выбирает возможную комбинацию 215, соответствующую минимальному значению 250mm стоимости. Выбранная комбинация 225, имеющая минимальное значение 250min стоимости, может соответствовать наиболее эффективной комбинации 220, однако это не обязательно.
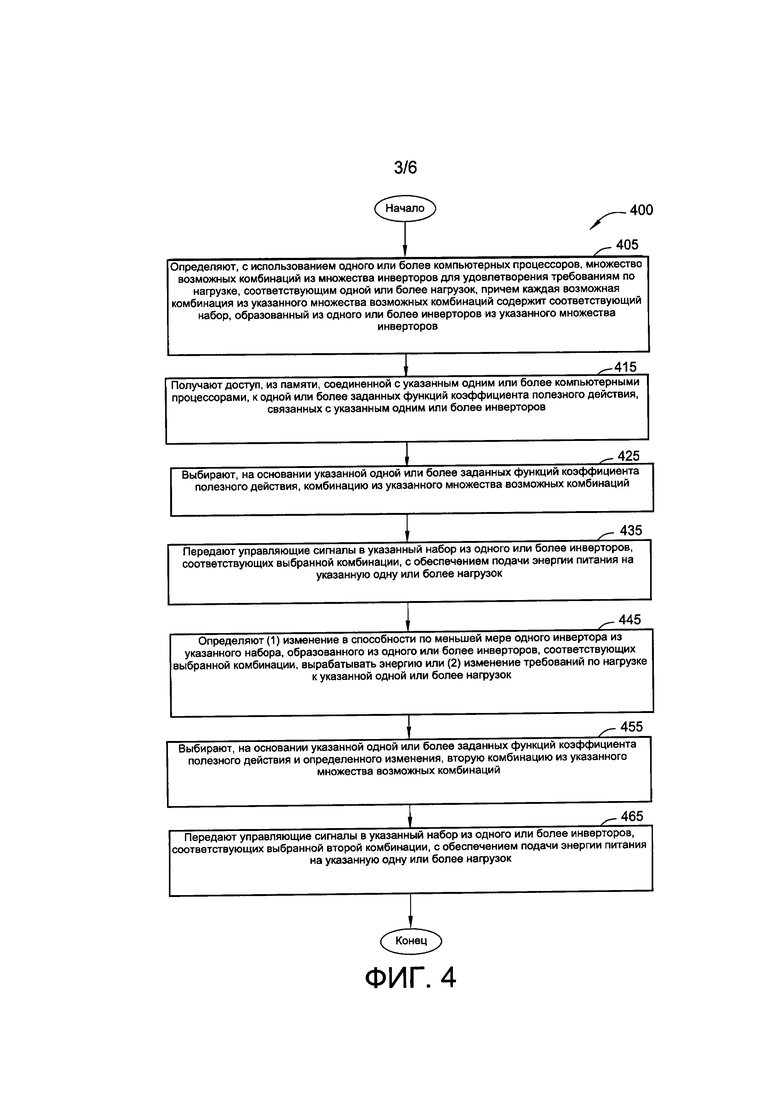
На фиг. 4 показан иллюстративный способ 400 управления энергораспределением от множества инверторов на одну или более электрических нагрузок согласно одному из вариантов реализации. Способ 400 в целом выполняют посредством одного или более компьютерных процессоров одного или более контроллеров, таких как контроллер параллельного управления или контроллер 110 для расчета коэффициента полезного действия, описанных со ссылкой на фиг. 1. Способ 400 начинается в блоке 405, в котором один или более компьютерных процессоров используют для определения множества возможных комбинаций из множества инверторов для удовлетворения требованиям по нагрузке, соответствующим указанным одной или более нагрузкам. Каждая возможная комбинация из множества комбинаций из множества возможных комбинаций содержит соответствующий набор, образованный из одного или более инверторов из множества инверторов.
В блоке 415 к одной или более заданных функций коэффициента полезного действия, связанных с указанными одним или более инверторами, осуществляют доступ из памяти, соединенной с указанными одним или более компьютерными процессорами. В некоторых случаях каждый из множества инверторов имеет по существу идентичные расчетные электрические параметры и/или другие электрические характеристики, так что одиночная функция коэффициента полезного действия соответствует работе каждого из множества инверторов.
В блоке 425 указанные один или более компьютерных процессоров выбирают, на основании указанных одной или более заданных функций коэффициента полезного действия, комбинации из множества комбинаций. В блоке 435 указанные один или более компьютерных процессоров передают управляющие сигналы в набор из одного или более инверторов, соответствующих выбранной комбинации, с обеспечением подачи энергии питания на указанные одну или более нагрузок.
В блоке 445 указанные один или более компьютерных процессоров определяют (1) изменение способности по меньшей мере одного инвертора из набора, образованного из одного или более инверторов, соответствующих выбранной комбинации, вырабатывать энергию или (2) изменения требований по нагрузке к указанным одной или более нагрузкам.
В блоке 455 указанные один или более компьютерных процессоров выбирают, на основании указанных одной или более заданных функций коэффициента полезного действия и определенного изменения, вторую комбинацию из множества возможных комбинаций. В блоке 465 указанные один или более компьютерных процессоров передают управляющие сигналы в набор из одного или более инверторов, соответствующих выбранной второй комбинации, с обеспечением подачи энергии питания на указанные одну или более нагрузок. В некоторых вариантах реализации набор, соответствующий первой комбинации, отличается от второго набора, соответствующего второй комбинации, по меньшей мере одним инвертором. Способ 400 заканчивается после завершения блока 465.
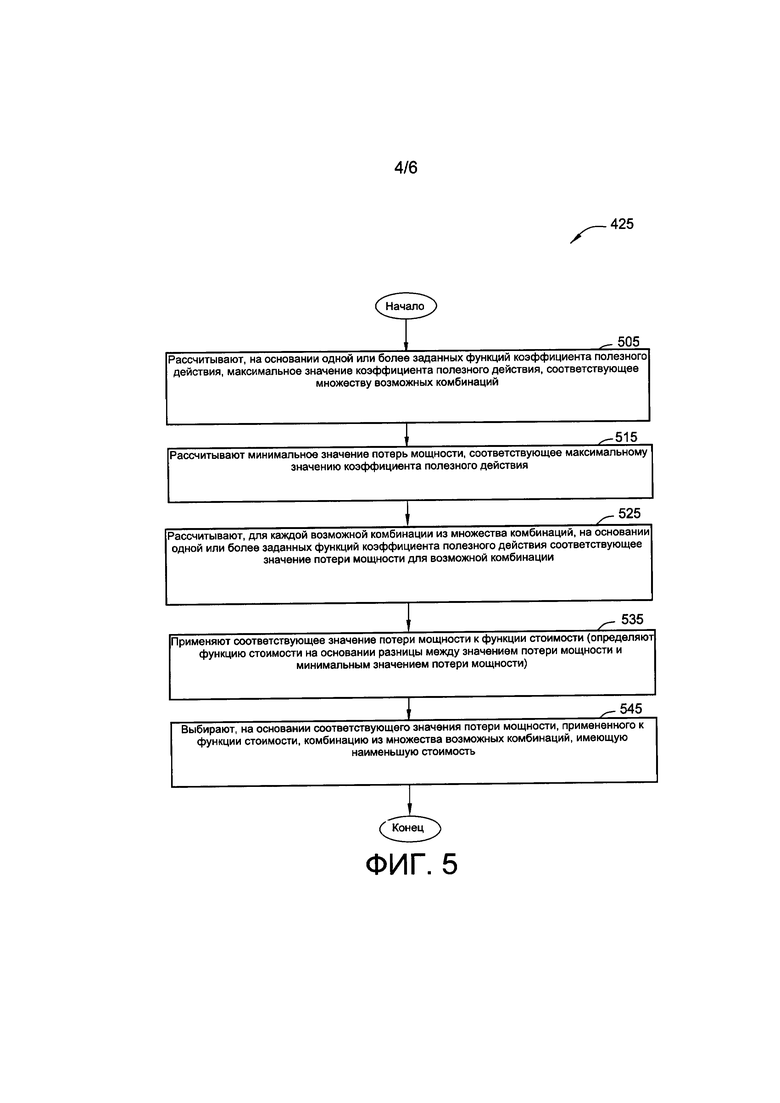
На фиг. 5, 6 и 7 показаны иллюстративные способы выбора комбинации инверторов на основании одной или более заданных функций коэффициента полезного действия согласно различным вариантам реализации. Например, способы, показанные на каждой из фиг. 5, 6, и 7, могут соответствовать блоку 425 вышеописанного способа 400.
Способ, показанный на фиг. 5, начинается в блоке 505, в котором указанные один или более процессоров рассчитывают, на основании указанных одной или более заданных функций коэффициента полезного действия, максимальное значение коэффициента полезного действия, соответствующее множеству возможных комбинаций. В блоке 515 указанные один или более процессоров рассчитывают минимальное значение потери мощности, соответствующее максимальному значению коэффициента полезного действия. В блоке 525 указанные один или более процессоров рассчитывают, для каждой возможной комбинации из множества комбинаций, на основании указанных одной или более заданных функций коэффициента полезного действия соответствующее значение потери мощности для возможной комбинации. В блоке 535 указанные один или более процессоров применяют соответствующее значение потери мощности к функции стоимости. В некоторых вариантах реализации применение соответствующего значения потери мощности включает определение функции стоимости на основании разницы между значением потери мощности и минимальным значением потери мощности. В блоке 545 указанные один или более процессоров выбирают, на основании соответствующего значения потери мощности, примененного к функции стоимости, комбинации из множества возможных комбинаций, имеющей наименьшую стоимость. Способ, показанный на фиг. 5, заканчивается после завершения блока 545.
Способ, показанный на фиг. 6, начинается в блоке 605, в котором указанные один или более процессоров определяют значение коэффициента полезного действия для каждой возможной комбинации из множества возможных комбинаций. В блоке 615 указанные один или более процессоров определяют наиболее эффективную комбинацию, соответствующую наибольшему значению коэффициента полезного действия. В блоке 625 указанные один или более процессоров назначают соответствующий приоритет каждой из возможных комбинаций на основании определенных значений коэффициента полезного действия. В блоке 635 указанные один или более процессоров определяют вектор весовых коэффициентов на основании приоритета. В блоке 645 указанные один или более процессоров выбирают, на основании заданной функции стоимости, настроенной на применение вектора весовых коэффициентов для наложения штрафа на выбор комбинаций, значения коэффициента полезного действия которых меньше значений коэффициента полезного действия наиболее эффективной комбинации, комбинации из множества возможных комбинаций, имеющей наименьшую стоимость. Способ, показанный на фиг. 6, заканчивается после завершения блока 645.
Способ, показанный на фиг. 7, начинается в блоке 705, в котором указанные один или более процессоров назначают, для каждой возможной комбинации из множества возможных комбинаций, соответствующий приоритет на основании сводного коэффициента полезного действия указанных одного или более инверторов из соответствующего набора. В блоке 715 указанные один или более процессоров выбирают комбинацию на основании соответствующего приоритета. Способ, показанный на фиг. 7, заканчивается после завершения блока 715.
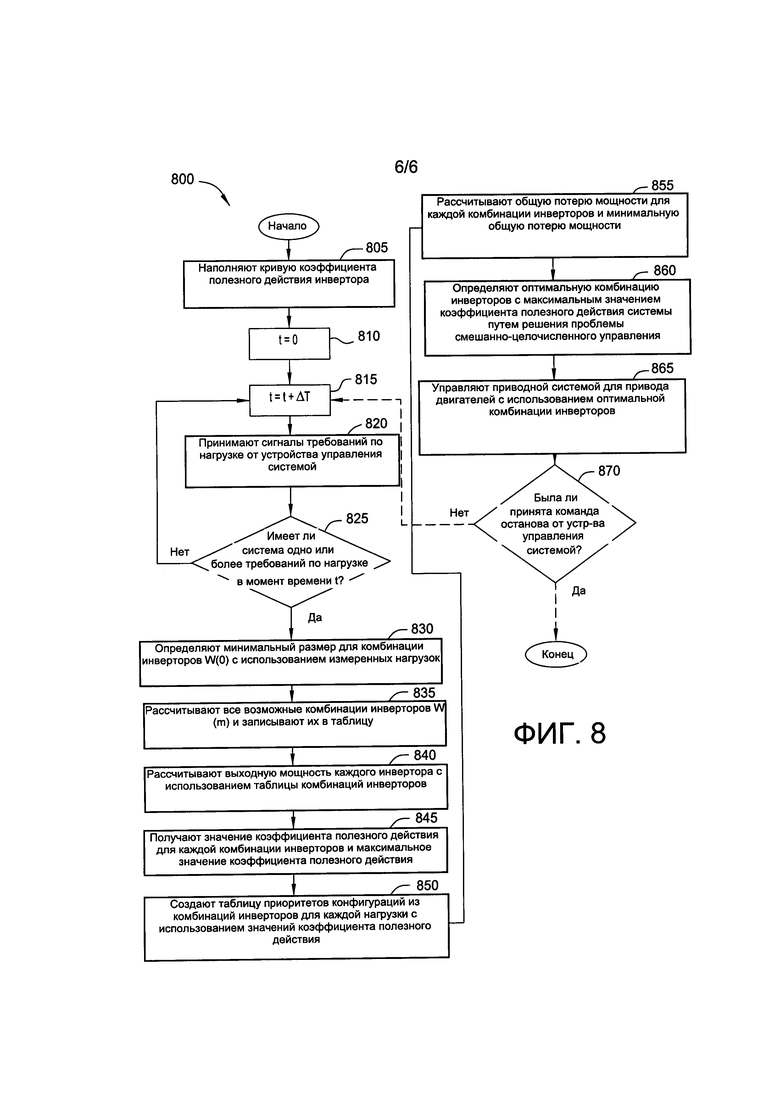
На фиг. 8 показан иллюстративный способ 800 управления энергораспределением от множества инверторов на одну или более нагрузок согласно одному из вариантов реализации. Обычно способ 800 может быть выполнен одним или более контроллерами в сочетании с одним или более вариантами реализации, описанными в данном документе. Например, способ 800 обеспечивает один из неограничивающих примеров способа 400, описанного выше со ссылкой на фиг. 4. Кроме того, способ 800 использует иллюстративную конфигурацию из пяти (5) инверторов и трех (3) нагрузок («Нагрузка-1», «Нагрузка-2» и «Нагрузка-3»), как показано на фиг. 1, несмотря на то, что также возможно и иное количество указанных элементов.
Способ 800 начинается в блоке 805, в котором указанные один или более контроллеров получают кривую коэффициента полезного действия инвертора. Кривая коэффициента полезного действия инвертора в целом соответствует вышеописанной заданной функции коэффициента полезного действия. В блоке 810 указанные один или более контроллеров задают переменную времени (t), равную нулю. В блоке 815 переменную t времени обновляют на ΔТ.
В блоке 820 указанные один или более контроллеров принимают сигналы требований по нагрузке, описанные как сигналы PLoad-1(t), PLoad-2(t) и PLoad-3(t) требований по нагрузке, от устройства управления системой. В блоке 825 указанные один или более контроллеров определяют, имеет ли система одно или более требований по нагрузке в момент времени t Если сигналы PLoad-1(t), PLoad-2(t) и PLoad-3(t) требований по нагрузке равны нулю (что указывает на ненагруженное состояние) («НЕТ» ветвь), указанные один или более контроллеров возвращаются к блоку 815 и ожидают получения следующей информации о требованиях по нагрузке. Если какой-либо из сигналов PLoad-1(t), PLoad-2(t) и PLoad-3(t) требований по нагрузке не равен нулю («ДА» ветвь), способ переходит к блоку 830.
В рамках данного примера каждая «Комбинация инверторов» представляет один или более инверторов, которые объединены вместе с обеспечением параллельного включения для привода конкретной нагрузки. В частности, Комбинация-1 инверторов приводит Нагрузку-1, Комбинация-2 инверторов приводит Нагрузку-2, а Комбинация-3 инверторов приводит Нагрузку-3. Поскольку потребляемая мощность каждой нагрузки может изменяться как функция от времени, количество инверторов, содержащихся в каждой комбинации инверторов, может быть динамически изменено (то есть, увеличено и/или уменьшено) для обеспечения соответствия изменяющимся значениям потребляемой мощности. При использовании Нагрузки-1 и Комбинации-1 инверторов в качестве примера в один момент времени может иметься только один (1) инвертор в комбинации-1 инверторов, поскольку потребляемая мощность Нагрузки-1 является относительно низкой. В другой момент времени Комбинация-1 инверторов может содержать пять (5) включенных параллельно инверторов, поскольку потребляемая мощность Нагрузки-1 является очень высокой. Еще в один момент времени комбинация-1 инверторов может содержать ноль (0) инверторов, поскольку потребляемая мощность Нагрузки-1 равна нулю.
В таблице 1 приведен пример набора переменных, используемых для выбора комбинаций инверторов согласно способу 800, а в таблице 2 приведен пример набора условий.
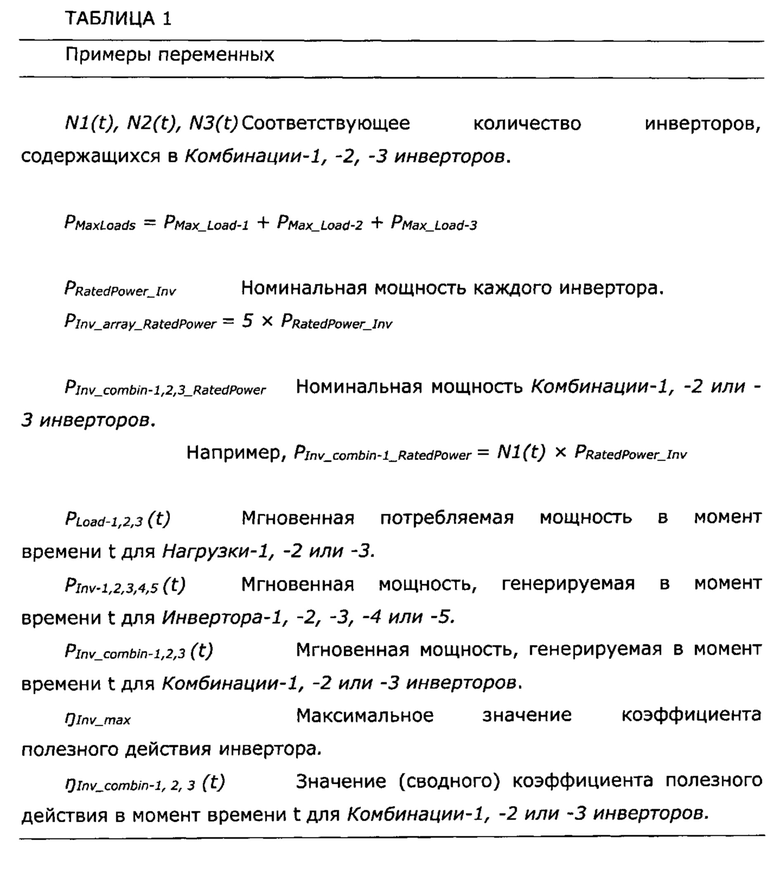

В блоке 830 указанные один или более контроллеров определяют минимальный размер для каждого порядкового числа комбинации инверторов: N1(t), N2(t) и N3(t) в Комбинации-1, -2 и -3 инверторов согласно значениям потребляемой мощности от Нагрузки-1, -2 и -3. В таблице 3 приведен один из примеров набора этапов определения минимального размера.

В блоке 835 указанные один или более контроллеров рассчитывают все возможные комбинации W(m) инверторов и записывают их в таблицу. Указанные один или более контроллеров могут дополнительно определять количество нагрузок, которые находятся в ненагруженном состоянии. В таблице 4 приведен пример набора этапов для определения минимального размера, в таблице 5 приведен пример набора этапов для записи назначений, а в таблице 6 приведен пример набора назначений.


Например, предположим, что N1(t)=2, N2(t)=1, N3(t)=0. Это означает, что Нагрузка-1 требует наличия двух (2) инверторов, Нагрузка-2 требует наличия одного (1) инвертора, а Нагрузка-3 находится в ненагруженном состоянии.
В дальнейшем минимальное количество инверторов, используемых для удовлетворения требованиям по нагрузке U, равно трем (3).
Остальные неиспользуемые инверторы (V) имеются в количестве, равном двум (2), а m=0, 1 и 2.
Нагрузка-3 находится в ненагруженном состоянии, так что порядковый номер Нагрузки или Нагрузок, которые имеют ненагруженное состояние Y, равно 1.
Общее W(m) будет рассчитано следующим образом:

Таким образом, W(1)=2, a W(2)=3.

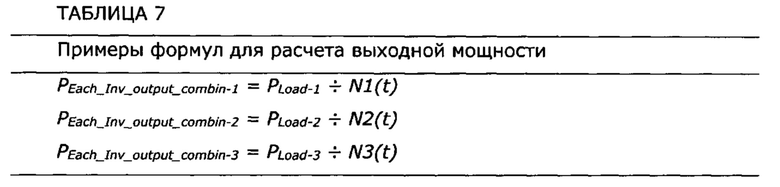
В блоке 840 указанные один или более контроллеров рассчитывают выходную мощность для каждого инвертора в соответствии с возможными комбинациями инверторов, определенными в таблице 6. В таблице 7 приведен один из примеров набора формул для расчета выходной мощности.
В блоке 845 указанные один или более контроллеров получают значение коэффициента полезного действия или значения ηInv_combin-1,2,3 коэффициента полезного действия и максимальное значение ηInv_Max коэффициента полезного действия с использованием кривой коэффициента полезного действия нагруженного инвертора. В таблице 8 приведен пример набора формул, используемых для получения различных значений коэффициента полезного действия.

В блоке 850 указанные один или более контроллеров создают таблицу приоритетов для конфигураций комбинаций инверторов с тем, чтобы ранжировать каждую Комбинацию инверторов для Нагрузки-1, -2 и -3 в приоритетном порядке таким образом, что для каждой нагрузки Комбинация инверторов с большим значением коэффициента полезного действия имеет более высокий приоритет. Более высокий приоритет предполагает, что Комбинация инверторов в результате приведет к получению большего коэффициента полезного действия системы и, соответственно, она должна быть реализована первой.
Для каждой нагрузки наиболее идеальной является Комбинация инверторов с максимальным значением коэффициента полезного действия, которая будет иметь наивысший показатель приоритета. С другой стороны, наименее идеальной является Комбинация инверторов с наименьшим значением коэффициента полезного действия в каждой нагрузке, которая будет иметь наименьший показатель приоритета. Если более одной из Комбинаций инверторов в каждой нагрузке имеют одно и то же значение коэффициента полезного действия, о указанные дин или более контроллеров назначают этим комбинациям инверторов показатель приоритета одного и того же порядка.
Если Нагрузка-n находится в ненагруженном состоянии, в дальнейшем не используют никакого инвертора, а его значение ηInv_combin-n коэффициента полезного действия равно нулю. В таком частном случае показатель приоритета должен иметь постоянное значение для каждой Комбинации инверторов, поскольку эта нагрузка не имеет какого-либо весового коэффициента для определения оптимальной комбинации инверторов (в блоке 860).
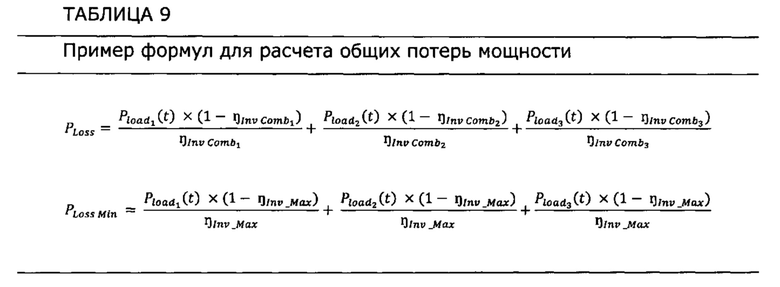
В блоке 855 указанные один или более контроллеров рассчитывают общую потерю мощности для каждой Комбинации инверторов, описанных в таблице 6, а также рассчитывают минимальную общую потерю мощности. В таблице 9 приведен один из примеров набора формул, используемого для расчета общей потери мощности и минимальной общей потери мощности.
В блоке 860 указанные один или более контроллеров определяют Комбинацию инверторов с максимальным результирующим коэффициентом полезного действия системы путем решения проблемы смешанно-целочисленного управления. В таблице 10 приведен один из примеров набора этапов, используемых для определения Комбинации инверторов.

Условия коммутации
1) Соединение каждого инвертора j в нагрузке k:

k = нагрузка
j = инвертор
Ni = последняя нагрузка в параллельно работающей системе
Nj = последний инвертор в параллельно работающей системе
2) Условие каждого инвертора j может быть соединено только с одной нагрузкой в момент времени t.
3) Соединение каждой конфигурации i из комбинаций инверторов для нагрузки k.

i = все возможные комбинации инверторов для нагрузки k
4) Условие, основанное на свойствах конфигурации из комбинаций инверторов
 *
*
Ni = последняя комбинация инверторов для нагрузки к
Nj = последняя конфигурация из комбинаций инверторов для нагрузки k
Задача состоит в максимизации результирующего коэффициента полезного действия системы путем минимизации общих потерь мощности в отношении инвертора или инверторов с одновременным обеспечением удовлетворения требованиям по нагрузке путем динамического изменения Комбинации-1, -2 и -3 инверторов. Квадратное уравнение в среднеквадратическом члене функции стоимости накладывает штраф на инверторы для работы за пределами своего оптимального диапазона потерь мощности. Путем формулировки проблемы управления в смешанно-целочисленной квадратичной программе, в дальнейшем мы могли бы определить оптимальную комбинацию инверторов, которая будет иметь наименьший размер штрафа.
Функция стоимости:
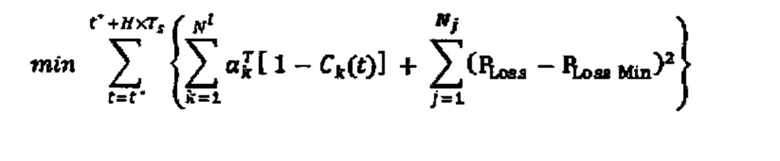


k = нагрузка
Ni = последняя нагрузка в параллельно работающей системе
Nj = порядковый номер последней комбинации инверторов
t* = постоянная времени
Н = общее количество временных тактов во время работы
Ts = время выборки
PLoss = общие потери мощности
PLoss Min = минимальные общие потери мощности
Ck(t) = представляет собой вектор, который описывает соединение каждой комбинации инверторов для нагрузки к в момент времени г. Если значение Ck1(t) в пределах вектора Ck(t) равно 1, это означает, что первая комбинация инверторов не соединена с Нагрузкой к. Аналогичная логическая процедура применяется и в отношении 
 = вектор весовых коэффициентов для наложения штрафа на операцию по использованию комбинаций инверторов за пределами своего максимального значения коэффициента полезного действия, которое основано на списке приоритетов комбинаций инверторов в блоке 850. Что
= вектор весовых коэффициентов для наложения штрафа на операцию по использованию комбинаций инверторов за пределами своего максимального значения коэффициента полезного действия, которое основано на списке приоритетов комбинаций инверторов в блоке 850. Что 
В блоке 865 один или более контроллеров управляют приводной системой для привода двигателей с использованием определенной оптимальной комбинации инверторов. В блоке 870 один или более контроллеров определяют, была ли принята команда останова от устройства управления системой. В противном случае («НЕТ» ветвь), способ возвращается к блоку 815 с тем, чтобы ожидать дополнительных сигналов требований по нагрузке от устройства управления системой. Если была получена команда останова («ДА» ветвь), способ 800 завершается.
Описания различных вариантов реализации настоящего изобретения были приведены для целей иллюстрации, однако не следует полагать, что настоящее изобретение исчерпано или ограничено раскрытыми вариантами реализации. Многие модификации и изменения будут очевидны для специалистов в данной области техники без выхода за пределы объема и сущности описанных вариантов реализации. Терминология, использованная в данном документе, была выбрана для наилучшего пояснения принципов вариантов реализации, практического применения или технических усовершенствований по отношению к технологиям, имеющимся на рынке, или для обеспечения возможности понимания другими специалистами в данной области техники вариантов реализации, раскрытых в данном документе.
Специалисту в данной области техники следует учитывать, что аспекты настоящего изобретения могут быть реализованы в виде системы, способа или компьютерного программного продукта. Соответственно, аспекты настоящего изобретения могут принимать форму варианта реализации, полностью основанного на аппаратных средствах, варианта реализации, полностью основанного на программном обеспечении (в том числе аппаратно-программных средствах, резидентном программном обеспечении, микрокоде и т.д.), или варианта реализации, объединяющего программные и аппаратные аспекты, которые все в целом могут быть названы в данном документе как «схема», «модуль» или «система». Кроме того, аспекты настоящего изобретения могут принимать форму компьютерного программного продукта, реализованного на одном или более компьютерочитаемых носителях, содержащих размещенный на них компьютерочитаемый программный код.
Может быть использовано любое сочетание из одного или более компьютерочитаемых носителей. Компьютерочитаемый носитель может представлять собой компьютерочитаемый носитель для передачи сигналов или компьютерочитаемый носитель для хранения данных. Компьютерочитаемый носитель для хранения данных может представлять собой, например, но без ограничения, электронные, магнитные, оптические, электромагнитные, инфракрасные или полупроводниковые систему, аппарат или устройство, или их подходящую комбинацию. Более конкретные примеры (неполный перечень) компьютерочитаемого носителя для хранения данных могли бы содержать следующее: электрическое соединение, имеющее один или более проводов, портативную компьютерную дискету, жесткий диск, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), стираемое программируемое постоянное запоминающее устройство (EPROM или флэш-память), оптическое волокно, портативное постоянное запоминающее устройство на компакт дисках (CD-ROM), оптическое запоминающее устройство, магнитное запоминающее устройство или их любое подходящее сочетание. В контексте данного документа компьютерочитаемый носитель для хранения данных может представлять собой любой материальный носитель, который может содержать или хранить программу для использования системой, аппаратом или устройством для исполнения инструкций или применительно к ним.
Компьютерочитаемый носитель для передачи сигналов может содержать распространяемый информационный сигнал со встроенным в него компьютерочитаемым программным кодом, например, в полосе частот или в качестве части несущей волны. Такой распространяемый сигнал может принимать любую из множества различных форм, в том числе, но без ограничения, может представлять собой электромагнитный сигнал, оптический сигнал или их любое подходящее сочетание. Компьютерочитаемый носитель для передачи сигналов может представлять собой любую компьютерочитаемый носитель, который не представляет собой компьютерочитаемый носитель для хранения данных и который может передавать, распространять или транспортировать программу для использования системой, аппаратом или устройством для исполнения инструкций или применительно к ним.
Программный код, реализованный на компьютерочитаемом носителе, может быть передан с использованием любого подходящего носителя, в том числе, без исключения, беспроводной линии связи, проводной линии связи, оптического волоконного кабеля, радиочастоты и т.д., или с использованием их любого сочетания.
Компьютерный программный код для выполнения операций аспектов настоящего изобретения может быть написан на любом сочетании из одного или более языков программирования, в том числе на объектно-ориентированном языке программирования, таком как «Java», «Smalltalk», «С++» или т.п., и обычных процедурных языках программирования, таких как язык программирования «С», или схожих языках программирования. Программный код может исполняться полностью на пользовательском компьютере, частично на пользовательском компьютере, в качестве обособленного пакета программ, частично на пользовательском компьютере и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В случае последнего удаленный компьютер может быть соединен с пользовательским компьютером посредством сети любого типа, в том числе с помощью локальной вычислительной сети (LAN) или глобальной вычислительной сети (WAN), или может быть соединен с внешним компьютером (например, посредством сети Интернет с использованием поставщика услуг в сети Интернет).
Аспекты настоящего изобретения описаны выше со ссылкой на показанные блок-схемы и/или структурные схемы способов, устройств (систем) и компьютерных программных продуктов согласно вариантам реализации настоящего изобретения. При этом будет понятно, что каждый блок в показанных блок-схемах и/или структурных схемах, а также комбинации блоков на показанных блок-схемах и/или структурных схемах, могут быть реализованы посредством компьютерных программных инструкций. Эти компьютерные программные инструкции могут быть выданы на процессор компьютера общего назначения, специализированный компьютер или иное программируемое устройство обработки данных для создания машины, так что инструкции, исполняемые с помощью процессора компьютера или иного программируемого устройства обработки данных, создают средства для реализации функций/действий, указанных в блоке или блоках блок-схем и/или структурных схем.
Эти компьютерные программные инструкции также могут быть сохранены в компьютерочитаемом носителе, который может управлять компьютером, иным программируемым устройством обработки данных или другими устройствами с обеспечением их функционирования конкретным образом, так что инструкции, сохраненные в компьютерочитаемом носителе, формируют готовое изделие, содержащее инструкции, которые реализуют функцию/действие, указанные в блоке или блоках блок-схем и/или структурных схем.
Компьютерные программные инструкции также могут быть загружены на компьютер, иное программируемое устройство обработки данных или другие устройства с тем, чтобы вызывать выполнение наборов функциональных этапов на компьютере, ином программируемом устройстве обработки данных или других устройствах для создания реализуемого с помощью компьютера процесса таким образом, что инструкции, исполняемые на компьютере или ином программируемом устройстве, обеспечивают процессы по реализации функций/действий, указанных в блоке или блоках блок-схем и/или структурных схем.
Блок-схемы и структурные схемы на чертежах иллюстрируют архитектуру, функциональные возможности, а также работу возможных реализаций систем, способов и компьютерных программных продуктов согласно различным вариантам реализации настоящего изобретения. Таким образом, каждый блок в блок-схемах и структурных схемах могут представлять модуль, сегмент или часть инструкций, которые содержат одну или более исполняемых инструкций для реализации заданной логической функции или заданных логических функций. В некоторых альтернативных реализациях функции, указанные в блоке, могут выполняться в порядке, отличном от порядка, указанного на чертежах. Например, два блока, показанные последовательно, фактически могут исполняться по существу одновременно или эти блоки иногда могут исполняться в обратном порядке в зависимости от предполагаемых функциональных возможностей. Кроме того, следует отметить, что каждый блок в показанных структурных схемах и/или блок-схемах, а также комбинации блоков на показанных структурных схемах и/или блок-схемах, могут быть реализованы посредством систем на основе аппаратных средств специального назначения, которые осуществляют конкретные функции или операции или выполняют комбинации из инструкций для аппаратных средств специального назначения и компьютера.
Несмотря на то, что приведенное выше описание касается вариантов реализации настоящего изобретения, могут быть разработаны иные и дополнительные варианты реализации настоящего изобретения без выхода за пределы его первоначального объема, при этом объем настоящего изобретения определен приведенной далее формулой изобретения.



Группа изобретений относится к энергораспределительной системе и двум способам управления энергораспределением в модульной системе преобразователей с использованием результатов расчета коэффициента полезного действия. Для управления энергораспределением от множества инверторов на одну или более нагрузок определяют с помощью вычислительных средств множество инверторов для удовлетворения требований по нагрузке, осуществляют доступ из памяти к функциям коэффициента полезного действия, связанного с инверторами, на основании которого выбирают нужную комбинацию, передают управляющие сигналы для обеспечения подачи энергии. Второй способ отличается от первого тем, что выбор комбинации осуществляют на основании назначенного приоритета на основании сводного коэффициента полезного действия указанных одного или более инверторов. Энергораспределительная система для подачи энергии питания на одну или более нагрузок содержит множество инверторов, контроллер, содержащий один или более компьютерных процессоров и выполненный с возможностью осуществления вышеуказанных способов. Обеспечивается оптимальное энергораспределение между нагрузками. 3 н. и 17 з.п. ф-лы, 8 ил.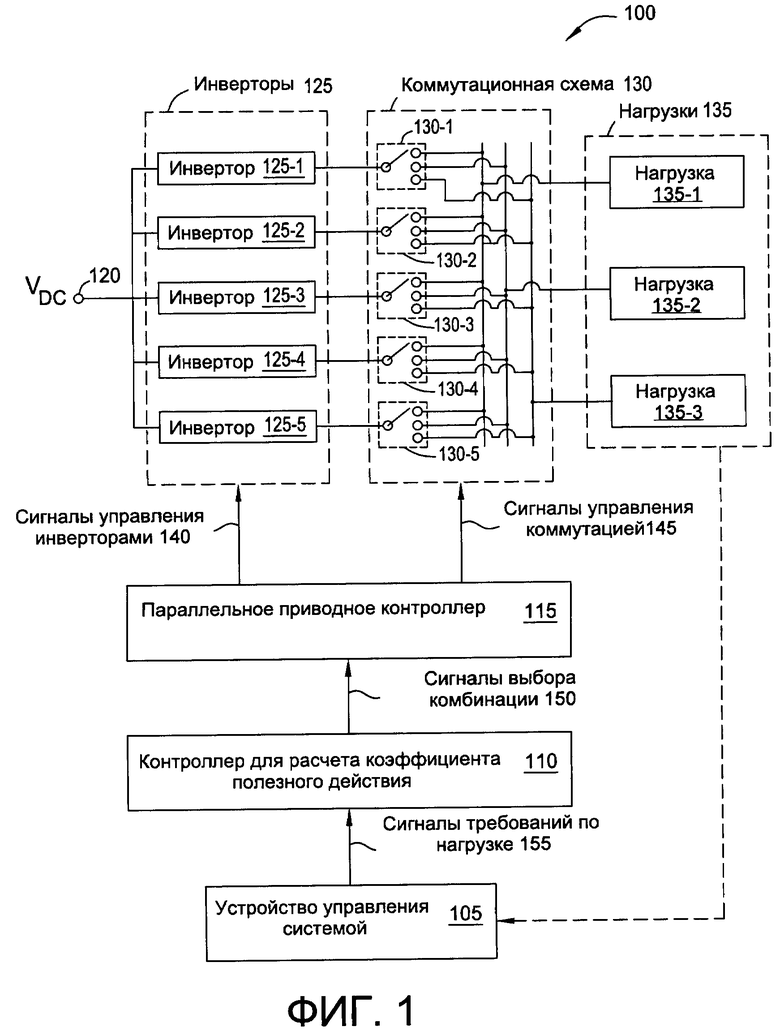
1. Способ (400) управления энергораспределением от множества инверторов (125) на одну или более нагрузок (135), включающий:
определение (405), с использованием одного или более компьютерных процессоров (205), множества возможных комбинаций (215) из указанного множества инверторов для удовлетворения требованиям (155) по нагрузке, соответствующим указанным одной или более нагрузкам, причем каждая возможная комбинация из указанного множества возможных комбинаций содержит соответствующий набор, образованный из одного или более инверторов из указанного множества инверторов,
осуществление доступа (415) из памяти (210), соединенной с указанными одним или более компьютерными процессорами, к одной или более заданным функциям (230) коэффициента полезного действия, связанным с указанными одним или более инверторами,
выбор (425, 150), на основании указанных одной или более заданных функций коэффициента полезного действия, комбинации (225) из указанного множества возможных комбинаций и
передачу (435) управляющих сигналов (140) в указанный набор из одного или более инверторов, соответствующих выбранной комбинации, с обеспечением подачи энергии питания на указанные одну или более нагрузок.
2. Способ по п. 1, согласно которому выбор комбинации из указанного множества возможных комбинаций включает:
расчет (525), для каждой возможной комбинации из указанного множества возможных комбинаций, на основании указанных одной или более заданных функций коэффициента полезного действия, соответствующего значения (Ploss, 1, …, Ploss, k) потери мощности для указанной возможной комбинации и выбор (545), на основании соответствующего значения потери мощности, примененного в отношении заданной функции (240) стоимости, комбинации из указанного множества возможных комбинаций, имеющей наименьшую стоимость.
3. Способ по п. 2, согласно которому заданная функция стоимости содержит смешанно-целочисленную квадратичную функцию.
4. Способ по п. 2, также включающий:
расчет (505), на основании указанных одной или более заданных функций коэффициента полезного действия, максимального значения (ηmax) коэффициента полезного действия, соответствующего указанному множеству возможных комбинаций, и
расчет (515) минимального значения (Ploss, min) потери мощности, соответствующего максимальному значению коэффициента полезного действия,
причем заданная функция стоимости основана на разнице между значением потери мощности и минимальным значением потери мощности.
5. Способ по п. 1, согласно которому выбор комбинации из множества возможных комбинаций включает:
определение (605) значения (η1, …, ηk) коэффициента полезного действия для каждой возможной комбинации из множества возможных комбинаций,
определение (615) наиболее эффективной комбинации (220), соответствующей наибольшему значению (ηmax) коэффициента полезного действия, и
выбор (645), на основании заданной функции (240) стоимости, настроенной на применение вектора (245) весовых коэффициентов для наложения штрафа на выбор комбинаций, значения коэффициента полезного действия которых меньше значений коэффициента полезного действия наиболее эффективной комбинации, комбинации (225) из указанного множества возможных комбинаций, имеющей наименьшую стоимость (250min).
6. Способ по п. 5, также включающий:
назначение (625) соответствующего приоритета (2351, …, 235k) каждой из возможных комбинаций на основании определенных значений коэффициента полезного действия и
определение (635) вектора весовых коэффициентов на основании приоритета.
7. Способ по п. 1, также включающий:
определение (445) (1) изменения в способности по меньшей мере одного инвертора из указанного набора, образованного из одного или более инверторов, соответствующих выбранной комбинации, вырабатывать энергию или (2) изменения требований по нагрузке к указанным одной или более нагрузкам,
выбор (455), на основании указанных одной или более заданных функций коэффициента полезного действия и определенного изменения, второй комбинации из указанного множества возможных комбинаций и
передачу (465) управляющих сигналов в указанный набор из одного или более инверторов, соответствующих выбранной второй комбинации, с обеспечением подачи энергии питания на указанные одну или более нагрузок.
8. Способ по п. 1, согласно которому выбор комбинации из указанного множества возможных комбинаций включает:
назначение (705), для каждой возможной комбинации из указанного множества возможных комбинаций, соответствующего приоритета (2351, …, 235k) на основании сводного коэффициента (η1, …, ηk) полезного действия указанных одного или более инверторов из соответствующего набора и выбор (715) комбинации (225) на основании соответствующего приоритета.
9. Энергораспределительная система (100) для подачи энергии питания на одну или более нагрузок (135), содержащая:
множество инверторов (125) и
контроллер (110, 115), содержащий один или более компьютерных процессоров (205) и выполненный с возможностью:
определения (405) множества возможных комбинаций (215) из указанного множества инверторов для удовлетворения требованиям (155) по нагрузке, соответствующим указанным одной или более нагрузкам, причем каждая возможная комбинация из указанного множества возможных комбинаций содержит соответствующий набор, образованный из одного или более инверторов из указанного множества инверторов,
осуществления доступа (415) из памяти (210), соединенной с указанными одним или более компьютерными процессорами, к одной или более заданным функциям (230) коэффициента полезного действия, связанным с указанными одним или более инверторами,
выбора (425, 150), на основании указанных одной или более заданных функций коэффициента полезного действия, комбинации (225) из указанного множества возможных комбинаций и
передачи (435) управляющих сигналов (140) в указанный набор из одного или более инверторов, соответствующих выбранной комбинации, с обеспечением подачи энергии питания на указанные одну или более нагрузок.
10. Энергораспределительная система по п. 9, в которой выбор комбинации из указанного множества возможных комбинаций включает:
расчет (525), для каждой возможной комбинации из множества возможных комбинаций, на основании указанных одной или более заданных функций коэффициента полезного действия, соответствующего значения (Ploss, 1, …, Ploss, k) потери мощности для указанной возможной комбинации и
выбор (545), на основании соответствующего значения потери мощности, примененного в отношении заданной функции (240) стоимости, комбинации из указанного множества возможных комбинаций, имеющей наименьшую стоимость.
11. Энергораспределительная система по п. 10, в которой заданная функция стоимости содержит смешанно-целочисленную квадратичную функцию.
12. Энергораспределительная система по п. 10, в которой контроллер также выполнен с возможностью:
расчета (505), на основании указанных одной или более заданных функций коэффициента полезного действия, максимального значения (ηmax) коэффициента полезного действия, соответствующего указанному множеству возможных комбинаций, и
расчета (515) минимального значения (Ploss, min) потери мощности, соответствующего максимальному значению коэффициента полезного действия,
причем заданная функция стоимости основана на разнице между значением потери мощности и минимальным значением потери мощности.
13. Энергораспределительная система по п. 9, в которой выбор комбинации из указанного множества возможных комбинаций включает:
определение (605) значения (η1, …, ηk) коэффициента полезного действия для каждой возможной комбинации из указанного множества возможных комбинаций,
определение (615) наиболее эффективной комбинации (220), соответствующей наибольшему значению (ηmax) коэффициента полезного действия, и
выбор (645), на основании заданной функции (240) стоимости, настроенной на применение вектора (245) весовых коэффициентов для наложения штрафа на выбор комбинаций, значения коэффициента полезного действия которых меньше значений коэффициента полезного действия наиболее эффективной комбинации, комбинации (225) из указанного множества возможных комбинаций, имеющей наименьшую стоимость (250min).
14. Энергораспределительная система по п. 13, в которой контроллер также выполнен с возможностью:
назначения (625) соответствующего приоритета (2351, …, 235k) каждой из возможных комбинаций на основании определенных значений коэффициента полезного действия и
определения (635) вектора весовых коэффициентов на основании приоритета.
15. Энергораспределительная система по п. 9, в которой контроллер также выполнен с возможностью:
определения (445) (1) изменения в способности по меньшей мере одного инвертора из указанного набора, образованного из одного или более инверторов, соответствующих выбранной комбинации, вырабатывать энергию или (2) изменения требований по нагрузке к указанным одной или более нагрузкам,
выбора (455), на основании указанных одной или более заданных функций коэффициента полезного действия и определенного изменения, второй комбинации из множества возможных комбинаций и
передачи (465) управляющих сигналов в указанный набор из одного или более инверторов, соответствующих выбранной второй комбинации, с обеспечением подачи энергии питания на указанные одну или более нагрузок.
16. Энергораспределительная система по п. 9, в которой выбор комбинации из указанного множества возможных комбинаций включает:
назначение (705), для каждой возможной комбинации из указанного множества возможных комбинаций, соответствующего приоритета (2351, …, 235k) на основании сводного коэффициента (η1, …, ηk) полезного действия указанных одного или более инверторов из соответствующего набора и
выбор (715) комбинации (225) на основании соответствующего приоритета.
17. Способ (400) управления энергораспределением от множества инверторов (125) на одну или более нагрузок (135), включающий:
определение (405), с использованием одного или более компьютерных процессоров (205), множества возможных комбинаций (215) из указанного множества инверторов для удовлетворения требованиям (155) по нагрузке, соответствующим указанным одной или более нагрузкам, причем каждая возможная комбинация из указанного множества возможных комбинаций содержит соответствующий набор, образованный из одного или более инверторов из указанного множества инверторов,
осуществление доступа (415) из памяти (210), соединенной с указанными одним или более компьютерными процессорами, к одной или более заданным функциям (230) коэффициента полезного действия, связанным с указанными одним или более инверторами,
назначение (705), для каждой возможной комбинации из указанного множества возможных комбинаций, соответствующего приоритета (2351, …, 235k) на основании сводного коэффициента (η1, …, ηk) полезного действия указанных одного или более инверторов из соответствующего набора,
выбор (715) комбинации (225) из указанного множества возможных комбинаций на основании соответствующего приоритета и
передачу (435) управляющих сигналов (140) в указанный набор из одного или более инверторов, соответствующих выбранной комбинации, с обеспечением подачи энергии питания на указанные одну или более нагрузок.
18. Способ по п. 17, согласно которому назначенный приоритет применяют к заданной функции стоимости, причем выбор комбинации из указанного множества возможных комбинаций на основании соответствующего приоритета включает:
определение (645), для каждой возможной комбинации из указанного множества возможных комбинаций, на основании заданной функции стоимости соответствующей стоимости (2501, …, 250k) для возможной комбинации и
выбор (645) комбинации (225) из указанного множества возможных комбинаций, имеющей наименьшую стоимость (250min).
19. Способ по п. 17, также включающий:
определение (635) вектора (245) весовых коэффициентов на основании назначенного приоритета,
причем заданная функция (240) стоимости применяет вектор весовых коэффициентов для наложения штрафа на выбор комбинаций, значения коэффициента полезного действия которых меньше значений коэффициента полезного действия наиболее эффективной комбинации (220), имеющей наибольший сводный коэффициент (ηmax) полезного действия.
20. Способ по п. 17, также включающий:
определение (445) (1) изменения в способности по меньшей мере одного инвертора из указанного набора, образованного из одного или более инверторов, соответствующих выбранной комбинации, вырабатывать энергию или (2) изменения требований по нагрузке к указанным одной или более нагрузкам,
выбор (455), на основании указанных одной или более заданных функций коэффициента полезного действия и определенного изменения, второй комбинации из указанного множества возможных комбинаций и
передачу (465) управляющих сигналов в указанный набор из одного или более инверторов, соответствующих выбранной второй комбинации, с обеспечением подачи энергии питания на указанные одну или более нагрузок.
| RU 2015132215 A, 08.02.2017 | |||
| МЕХАНИЧЕСКАЯ ФОРСУНКА | 1926 |
|
SU8413A1 |
| УСТРОЙСТВО ЭЛЕКТРОПИТАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2432302C2 |
| US 20070259545 A1, 08.11.2007 | |||
| US 0009209721 B2, 08.12.2015. | |||

