ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к технологии получения изображений. В частности, настоящее изобретение относится к отслеживанию интересующего объекта информации ультразвукового изображения. Более конкретно, настоящее изобретение относится к способу получения ультразвуковых изображений, системе для получения ультразвуковых изображений, машиночитаемому носителю, а также программному элементу для получения ультразвуковых изображений.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Текущим трендом в области интервенционных процедур является более тесная интеграция ультразвуковой и рентгеновской модальностей. Другими словами, разные модальности изображений применяются не по отдельности, но, предпочтительно, совместно во время определенной процедуры. Тем самым, недостатки некоторых модальностей могут быть скомпенсированы преимуществами других модальностей.
Например, хотя современные решения интервенционной ультрасонографии предлагают возможность 3-мерной визуализации, они часто основаны на двумерной ультразвуковой визуализации по различным причинам. В числе этих причин могут быть более высокое качество изображения, более высокая частота кадров и отсутствие потребности в кадрировании, настройке параметров ориентации объема или визуального воспроизведения при использовании двумерных ультразвуковых изображений по сравнению с 3-мерной визуализацией.
Для интервенционных процедур интересующий объект, например, инструмент, которым выполняют процедуру, представляют в виде информации изображения, получаемой с помощью соответствующих модальностей. При изображении упомянутого объекта или совмещении информации в виде изображения упомянутого объекта и информации изображения соответствующей модальности, человек, выполняющий процедуру, легко получает визуальную информацию о местоположении и/или ориентации интересующего объекта относительно анатомических структур, представленных в виде информации изображения от модальности. Например, траектория наконечника инструмента сквозь ткань может быть отслежена по соответствующей информации изображения, т.е. визуально сопровождаться человеком, выполняющим процедуру. Такое отслеживание позволяет, тем самым, подтверждать корректность процедуры, т.е. правильно ли проводится процедура.
Однако, во время транскатетерных интракардиальных процедур, например, введения митральной клипсы или абляции фибрилляции предсердий, используемые транскатетерные инструменты, например, митральная клипса или абляционный катетер, являются довольно узкими объектами, которые могут проявлять значительное пассивное движение из-за дыхания, сокращений сердца и кровотока, а также активное движение из-за направления инструмента интервенционистом.
В таких процедурах обычно получают ультразвуковые изображения с использованием чреспищеводной эхокардиографии или ЧЭхоКГ. ЧЭхоКГ выполняют специализированным датчиком, вводимым в пищевод пациента, который содержит ультразвуковой преобразователь на его наконечнике. Ультразвуковой преобразователь предназначен для получения изображения и доплеровской оценки ультразвуковых изображений. ЧЭхоКГ обычно обеспечивают более отчетливые изображения, в особенности с учетом тканевых структур, которые трудно наблюдать трансторакально, т.е. через грудную стенку с использованием внешнего ультразвукового преобразователя.
Поскольку, само ЧЭхоКГ находится в пищеводе, оно проявляет очень малые амплитуды движения. В частности, что касается транскатетерных процедур, движение датчика ЧЭхоКГ обычно меньше движения вышеописанных транскатетерных инструментов. Другими словами, относительное пространственное взаимное расположение и/или расстояние между транскатетерным инструментом и преобразователем ЧЭхоКГ является непостоянным, и, следовательно, если рассматривать получение 2-мерных изображений конкретной плоскости ультразвукового исследования, наконечник инструмента периодически выходит из текущей наблюдаемой плоскости ультразвукового исследования.
Чтобы обеспечить повторное появление наконечника инструмента в плоскости визуализации, требуется повторная регулировка плоскости визуализации. Это, в свою очередь, требует трудоемкой координации между интервенционистом, работающим с транскатетерным инструментом, и специалистом по ультразвуковой эхографии, работающим, в частности, с устройством получения ультразвуковых изображений.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей изобретения является предоставление возможности управления получением двумерного ультразвукового изображения, в частности, управления плоскостью визуализации устройства для получения ультразвукового изображения так, чтобы интересующий объект оставался видимым, в частности, без постоянной повторной регулировки параметров визуализации.
Соответственно, предлагаются способ получения ультразвуковых изображений, в частности, для отслеживания интересующего объекта в информации ультразвукового изображения, система для получения ультразвуковых изображений, машиночитаемый носитель, а также программный элемент для получения ультразвуковых изображений в соответствии с независимыми пунктами формулы изобретения. Предпочтительные варианты осуществления могут быть взяты из зависимых пунктов формулы изобретения.
Эти и другие аспекты настоящего изобретения будут очевидны из последующего пояснения со ссылкой на нижеописанные варианты осуществления. Примерные варианты осуществления настоящего изобретения описаны ниже со ссылкой на следующие чертежи.
Изображение на чертежах является схематическим. На разных чертежах сходные или идентичные элементы снабжены сходными или идентичными числовыми позициями.
Фигуры вычерчены не в масштабе, однако, могут отражать пропорции качественно.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - изображение примерного варианта осуществления взаимосвязи между информацией ультразвукового изображения и информацией рентгеновского изображения в соответствии с настоящим изобретением;
Фиг. 2 - примерный вариант осуществления системы для получения ультразвуковых изображений в соответствии с настоящим изобретением; и
Фиг. 3 - примерный вариант осуществления способа получения ультразвуковых изображений в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Один аспект настоящего изобретения относится к управлению и/или выставлению плоскости визуализации так, чтобы интересующий объект оставался видимым, т.е. в плоскости визуализации, без необходимости, в частности, постоянной, повторной регулировки параметров визуализации, в частности, положения и ориентации плоскости.
В ходе некоторой интервенционной процедуры могут быть применены как модальность рентгеновской визуализации, например, использующая C-образную консоль, тик и модальность ультразвуковой визуализации, например, ЧЭхоКГ, при этом каждая модальность выдает, в частности, информацию двумерного изображения.
Ультразвуковой преобразователь обычно содержит решетку преобразователей для получения информации изображения для конкретной плоскости двумерного ультразвукового изображения, которая может быть отрегулирована в 3 измерениях посредством варьирования ультразвуковых излучений решетки преобразователей.
Один аспект настоящего изобретения состоит в том, что ориентацией плоскости ультразвукового исследования управляют так, что плоскость ультразвукового исследования содержит рентгеновский источник. Кроме того, в случае, когда плоскость ультразвукового исследования также содержит проекцию интересующего объекта, например, наконечника инструмента транскатетерного инструмента на детекторе рентгеновского излучения, упомянутой пространственной информации достаточно для установления плоскости ультразвуковой визуализации, в которой может перемещаться наконечник инструмента транскатетерного инструмента без возможности выхода из плоскости ультразвукового исследования. Другими словами, в случае, когда плоскостью ультразвукового исследования управляют для содержания в ней (при всех обстоятельствах) рентгеновского источника, а также проекции наконечника инструмента, видимой на информации рентгеновского изображения, при том, однако, что упомянутая проекция не является статичной на детекторе рентгеновского излучения и, следовательно, может двигаться, что требует регулировки плоскости визуализации, наконечник инструмента транскатетерного инструмента будет оставаться видимым в плоскости ультразвукового исследования. Тем самым, плоскостью ультразвукового исследования управляют автоматически так, что интересующий объект находится в пределах изображения. Не требуется никакого дополнительного использования трехмерных изображений, которые в данном случае могли бы применяться для отслеживания наконечника инструмента только при снижении частоты кадров получения ультразвукового изображения.
Управление плоскостью ультразвукового исследования в соответствии с настоящим изобретением позволяет представлять движущийся интересующий объект в пределах плоскости ультразвукового исследования, тем самым избегая повторяющихся появления и пропадания объекта вследствие перемещения плоскости из-за активного движения или пассивного движения интересующего объекта, например, вследствие сердечных сокращений.
Чтобы сделать возможным вариант реализации способа получения ультразвуковых изображений в соответствии с настоящим изобретением, сначала принимается допущение, что информация ультразвукового изображения и информация рентгеновского изображения совмещены. Другими словами, известно относительное пространственное взаимное расположение между информацией ультразвукового изображения и отображенной C-образной консолью информацией, в частности, содержащей такую дополнительную информацию, как относительное положение рентгеновского источника. Например, при рассмотрении двумерного рентгеновского изображения, а также двумерного ультразвукового изображения, угол и положение обоих изображений относительно друг друга предполагаются известными в случае, когда упомянутые данные совмещены. Также может быть установлена и затем использована общая система координат или опорная система координат, посредством чего пространственно связываются отображенная C-образной консолью информация и информация ультразвукового изображения. Кроме того, предполагается также, что конкретная информация изображения, видимая в любом двумерном изображении, должна быть известной. Один пример совмещения информации ультразвукового изображения и информации рентгеновского изображения описан в публикации международной патентной заявки WO 2011/070477 заявителя настоящей заявки.
Дополнительно предполагается, что плоскость визуализации информации ультразвукового изображения может быть управляемой электронными средствами, например, с использованием подходящей решетки ультразвуковых преобразователей, известной в данной области техники.
Предполагается также, что интересующий объект может быть отслеживаемым, т.е. является визуально представляемым и обнаружимым по информации рентгеновского изображения. Другими словами, рентгеновское изображение должно содержать проекцию интересующего объекта, например, наконечник инструмента транскатетерного инструмента.
Следовательно, плоскостью ультразвукового исследования управляют так, что как и рентгеновский источник, так и отслеживаемый/проецируемый интересующий объект на рентгеновском изображении содержатся в плоскости ультразвукового исследования. Другими словами, рентгеновский источник, а также отслеживаемый интересующий объект на рентгеновском изображении описывают две независимых и прецизионно заданных точки плоскости ультразвуковой визуализации. Поскольку плоскость ультразвуковой визуализации также проходит через ультразвуковой датчик или ультразвуковой преобразователь, который в связи с этим обеспечивает третью задаваемую точку, плоскость ультразвукового исследования определена полностью и точно. Поскольку плоскость ультразвукового исследования при этом непрерывно повторно регулируется так, что рентгеновский источник, а также отслеживаемый интересующий объект на рентгеновском изображении остаются в плоскости ультразвукового исследования, то сам интересующий объект также остается в плоскости ультразвуковой визуализации, так как интересующий объект естественным образом расположен на линии между рентгеновским источником и проекцией интересующего объекта. Действительно, плоскость ультразвукового исследования определяется самим интересующим объектом, а также рентгеновским источником, однако, с интересующим объектом, визуализируемым его проекцией на детекторе рентгеновского излучения. Следовательно, обеспечивается также присутствие интересующего объекта в плоскости ультразвуковой визуализации. Неточности в системе визуализации, например, обусловленные ошибками при регистрации рентгеновских/ультразвуковых данных или неточности локализации интересующего объекта на рентгеновском изображении, могут потребовать соответствующей настройки толщины среза ультразвукового исследования. Обычно используют толщину среза 1, 2 или 3 мм.
Следовательно, в соответствии с настоящим изобретением первую плоскость ультразвукового изображения можно определить посредством использования трех точек в пространстве, т.е. наконечника ультразвукового преобразователя, рентгеновского источника, а также проекции интересующего объекта на детекторе рентгеновского излучения. С помощью упомянутой информации может быть установлена дополнительная вторая плоскость ультразвукового изображения, которая содержит вектор или линию между ультразвуковым преобразователем и самим интересующим объектом в 3-мерном пространстве в опорной системе координат, само положение которой известно из первой информации ультразвукового изображения, при отдельном рассмотрении совмещения между данными ультразвукового изображения и данными рентгеновского изображения. Затем может быть получено второе двумерное ультразвуковое изображение, содержащее упомянутый вектор между наконечником преобразователя и интересующим объектом, предоставляющий дополнительную степень свободы, которая может быть произвольно регулируемой. Другими словами, вторая плоскость двумерного ультразвукового изображения может быть поворачиваемой вокруг линии или вектора между наконечником преобразователя и интересующим объектом, находящимся в ткани пациента. Данная вторая плоскость двумерного ультразвукового изображения часто может быть размещена ортогонально первой плоскости ультразвукового изображения, получая посредством этого по меньшей мере некоторую трехмерную информацию, не смотря на использование только (двух) двумерных изображений.
Иначе говоря, в предположении, что интересующий объект отслеживается также в первой плоскости ультразвукового исследования, вторая плоскость ультразвукового изображения может быть помещена так, чтобы она проходила через интересующий объект. Это предоставляет интервенционисту дополнительную степень свободы для свободного выбора ориентации второй плоскости ультразвукового изображения, но, в то же время, все еще показывая интересующий объекта. Отслеживание в первой плоскости ультразвукового исследования очень облегчается тем, что положение интересующего объекта уже известно на рентгеновском изображении, и поэтому интересующий объект ограничен расположением на соответствующей эпиполярной линии на ультразвуковом изображении.
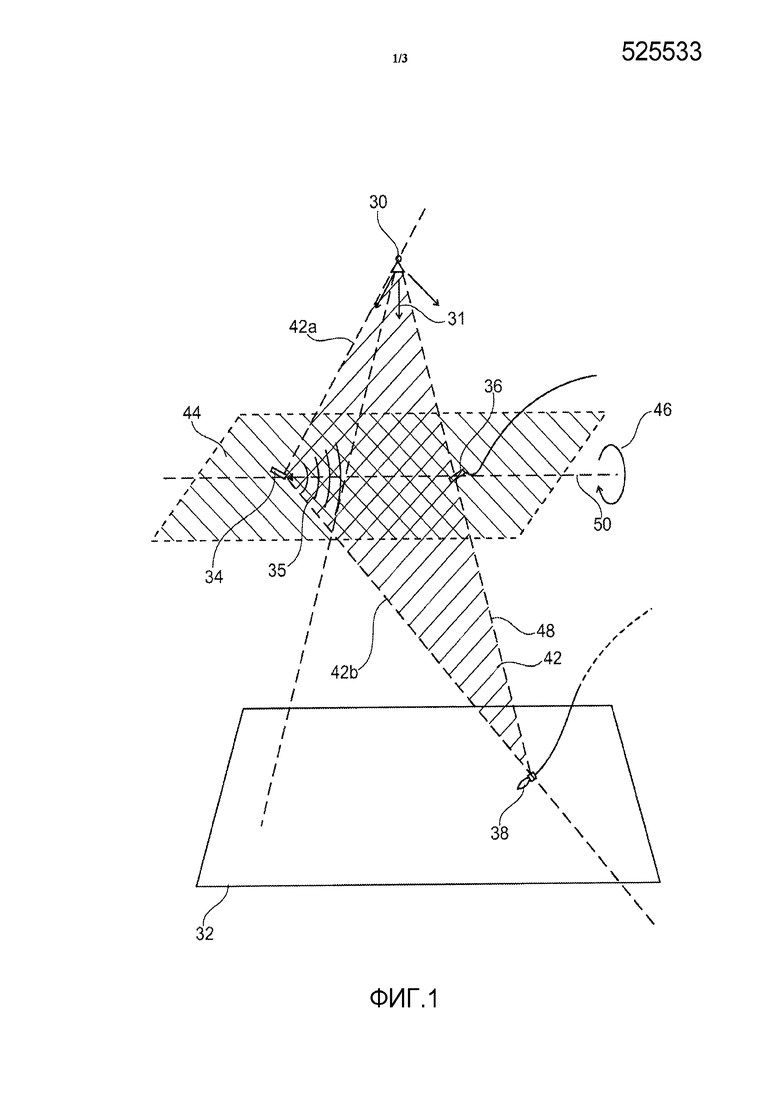
На фиг. 1 изображен примерный вариант осуществления взаимосвязи между информацией ультразвукового изображения и информацией рентгеновского изображения в соответствии с настоящим изобретением.
На фиг. 1 показана схема системы визуализации, использующей как получение рентгеновского изображения, так и получение ультразвукового изображения. Рентгеновский источник 30 генерирует рентгеновское излучение 31, которое, для примера, сформировано в виде конусного пучка, направленного к детектору 32 рентгеновского излучения. Детектор 32 рентгеновского излучения, для примера, осуществлен в виде двумерного детектора рентгеновского излучения, содержащего множество отдельных пиксельных элементов детектора, расположенных в виде матрицы пикселей, которая, однако, не изображена подробно на фиг. 1. На пути рентгеновского излучения 31 изображен интересующий объект 36, а именно наконечник транскатетерного инструмента. Интересующий объект 36 создает проекцию 38 на двумерном детекторе 32 рентгеновского излучения. Соответственно, устанавливается вектор или линия 48 между рентгеновским источником 30 и проекцией 38 интересующего объекта 36 на детекторе 32 рентгеновского излучения, также на данной линии 48 должен находиться интересующий объект 36.
Кроме того, на фиг. 1 показано также устройство ультразвуковой визуализации, осуществленное для примера в виде ультразвукового преобразователя 34. Ультразвуковой преобразователь 34 порождает прохождение ультразвукового сигнала 35, в данном случае направленного к интересующему объекту 36. На фиг. 1 показаны первая линия или вектор 42a от ультразвукового преобразователя 34 к рентгеновскому источнику 30, а также второй вектор или линия 42b от ультразвукового преобразователя 34 к проекции 38 интересующего объекта 36. Таким образом, первая плоскость 42 ультразвукового исследования установлена в пространстве точками положения ультразвукового преобразователя 34, рентгеновского источника 30 и проекции 38 интересующего объекта 36. Иначе говоря, плоскость ультразвукового исследования установлена траекториями или векторами 42a, b и 48.
Установление первой плоскости 42 ультразвукового исследования требует знания относительного пространственного взаимного расположения между информацией 40 рентгеновского изображения и информацией 42 ультразвукового изображения, что может быть выполнено посредством операции совмещения полученной C-образной консолью геометрической информации и информации ультразвукового изображения для получения пространственной взаимосвязи между упомянутыми двумя информациями изображения. Для упомянутой операции совмещения могут быть использованы известные методы обработки изображений или дополнительные средства типа электромагнитного отслеживания с применением элементов ЭМ (электромагнитного) слежения. С помощью упомянутой первой плоскости 42 ультразвукового исследования становится также известным местоположение интересующего объекта 36 в пространстве. В результате данное известное местоположение интересующего объекта 36 вместе с местоположением ультразвукового преобразователя 34 устанавливает линию или вектор 50 между ультразвуковым преобразователем 34 и интересующим объектом 36 для второй плоскости 44 ультразвукового исследования. Таким образом, вторая плоскость 44 ультразвукового исследования всегда содержит интересующий объект 36 в предположении, что упомянутая вторая плоскость 44 ультразвукового исследования всегда содержит линию 50, предоставляя, тем самым, степень 46 свободы, которая может быть выбрана произвольно, например, оператором системы 54 визуализации. Другими словами, дополнительная плоскость 44 ультразвукового изображения может быть повернута вокруг линии 50 между ультразвуковым преобразователем 34 и интересующим объектом 36. Одна предпочтительная настройка первой плоскости 42 ультразвукового исследования и второй плоскости 44 ультразвукового исследования заключается в расположении обеих плоскостей перпендикулярно друг другу, чтобы установить некоторую трехмерную систему отсчета для интервенциониста.
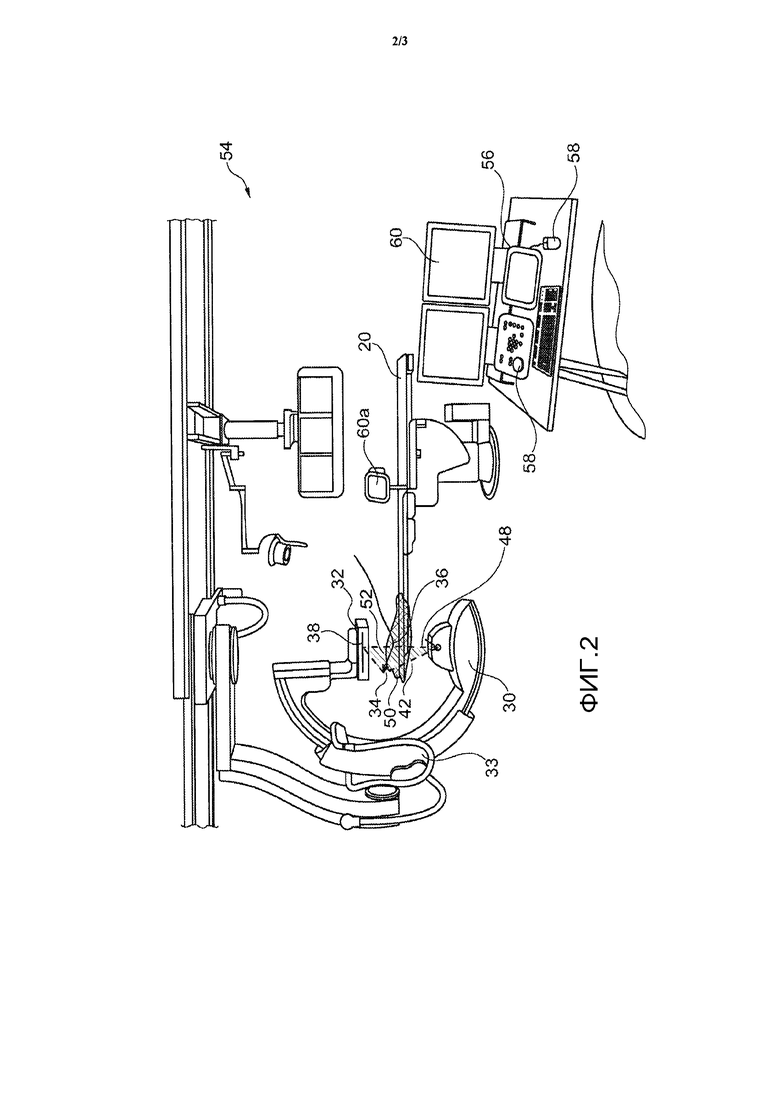
Далее, на фиг. 2 изображен примерный вариант осуществления системы для получения ультразвуковых изображений в соответствии с настоящим изобретением.
Примерный сценарий применения использует C-образную консоль 33, содержащую рентгеновский источник 30, а также детектор 32 рентгеновского излучения, при этом рентгеновское излучение 31 генерируется рентгеновским источником 30 и направляется к детектору 32 рентгеновского излучения. Подлежащий исследованию объект 52 расположен на пути рентгеновского излучения 31, при этом объект подвергают транскатетерной процедуре с помощью интересующего объекта 36, например, соответственно вводят транскатетерный инструмент в объект 52. Ультразвуковой преобразователь 34 расположен вблизи подлежащего исследованию объекта 52, в частности, в пищеводе, и осуществлен в виде ультразвукового источника для ЧЭхоКГ. Однако упомянутый конкретный вариант осуществления не изображен на фиг. 2, который больше относится к обычному ультразвуковому преобразователю 34.
Первая плоскость 42 ультразвукового исследования устанавливается рентгеновским источником 30, проекцией 38 интересующего объекта 36 и ультразвуковым преобразователем 34 в трехмерном пространстве.
Система 54 визуализации содержит процессорный элемент 56 с элементами 58 управления, осуществленными, для примера, в форме клавиатуры, и устройств ручного ввода, а также блок 60 отображения для отображения по меньшей мере некоторой информации изображения по информации рентгеновского изображения и первой и второй информацям ультразвукового изображения. Оператор системы 54 визуализации может представлять работающему интервенционисту подходящую информацию изображения на дисплее 60a, чтобы помогать в ходе процедуры. Посредством определения трехмерного положения интересующего объекта 36 в пространстве может быть установлена линия 50 между преобразователем 34 и интересующим объектом 36, позволяющая установить вторую плоскость 44 ультразвукового исследования, не изображенную на фиг. 2, которая может быть повернута вокруг линии 50 по желанию кого-то одного из оператора и интервенциониста.
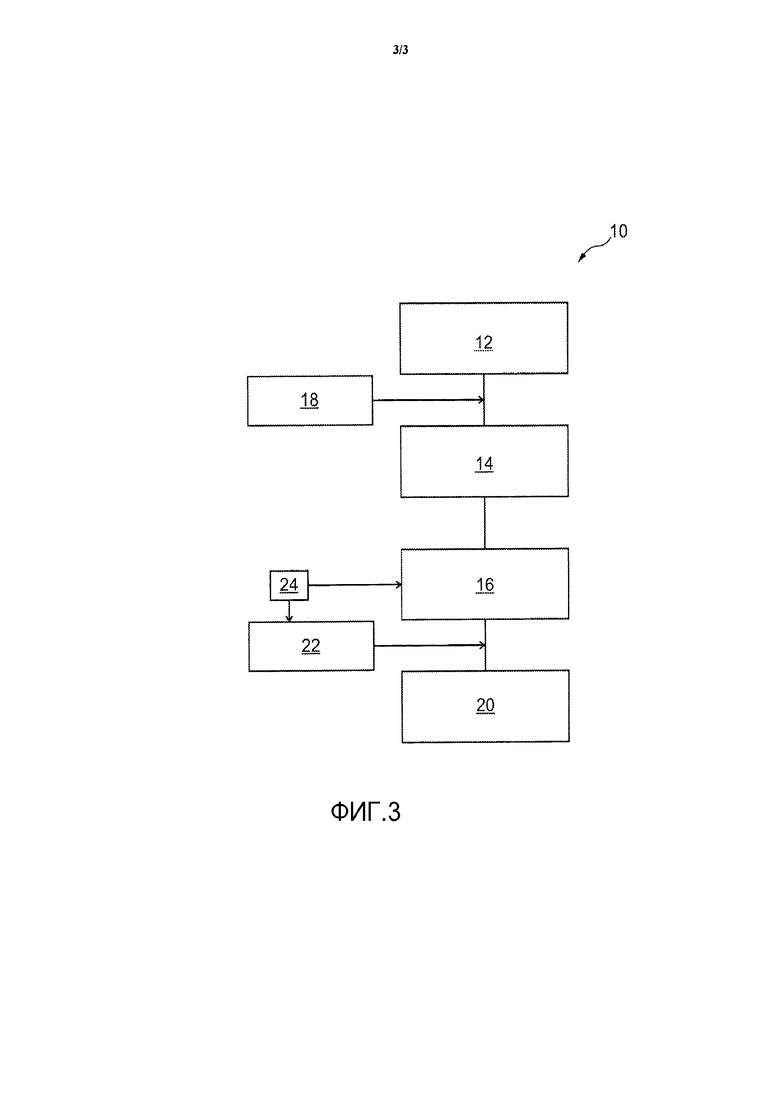
Далее на фиг. 3 изображен примерный вариант осуществления способа получения ультразвуковых изображений в соответствии с настоящим изобретением.
Фиг. 3 описывает способ 10 для получения ультразвуковых изображений, в частности, для отслеживания интересующего объекта по информации ультразвукового изображения, содержащий прием 12 информации рентгеновского изображения и информации ультразвукового изображения, обнаружение 14 интересующего объекта по информации рентгеновского изображения и управление 16 получением двумерного ультразвукового изображения так, чтобы интересующий объект находился в первой плоскости ультразвукового изображения. Процедура 18 совмещения помогает при получении относительного пространственного соотношения между информацией рентгеновского изображения и информацией ультразвукового изображения. Определенная первая плоскость ультразвукового изображения может быть визуализирована 20. Может быть получена 22 вторая информация ультразвукового изображения, соответствующая второй плоскости ультразвукового изображения, которая также может быть визуализирована отдельно или вместе с по меньшей мере одной из первой плоскости ультразвукового изображения и информации рентгеновского изображения. Оператор может регулировать 24 толщину по меньшей мере одной из первой плоскости ультразвукового изображения и второй плоскости ультразвукового изображения, чтобы поддерживать присутствие интересующего объекта в по меньшей мере одной из соответствующих плоскостей изображения.
СПИСОК ПОЗИЦИЙ:
10 способ получения ультразвуковых изображений
12 получение информации рентгеновского изображения и информации ультразвукового изображения
14 обнаружение интересующего объекта по информации рентгеновского изображения
16 управление получением двумерного ультразвукового изображения
18 совмещение информации рентгеновского изображения и информации ультразвукового изображения
20 визуализация
22 получение второй информации ультразвукового изображения
24 регулирование толщины среза плоскости ультразвукового изображения
30 рентгеновский источник
31 рентгеновское излучение
32 рентгеновский детектор
33 C-образная консоль
34 ультразвуковой преобразователь
35 прохождение ультразвукового сигнала
36 интересующий объект
38 проекция
40 информация рентгеновского изображения
42 первая плоскость ультразвукового изображения
44 вторая плоскость ультразвукового изображения
46 степень свободы
48 линия между рентгеновским источником и проекцией интересующего объекта
50 линия между ультразвуковым преобразователем и интересующим объектом
52 подлежащий обследованию объект
54 система визуализации
56 процессорный элемент
58 элемент управления
60 блок отображения
Группа изобретений относится к медицинской технике, а именно к средствам отслеживания интересующего объекта по информации ультразвукового изображения. Способ получения ультразвуковых изображений содержит прием информации рентгеновского изображения и информации ультразвукового изображения, причем взаимное пространственное расположение информации рентгеновского изображения и информации ультразвукового изображения задано, обнаружение интересующего объекта по информации рентгеновского изображения, управление получением двумерного ультразвукового изображения так, чтобы интересующий объект находился в первой плоскости ультразвукового изображения, и при этом первая плоскость ультразвукового изображения содержит рентгеновский источник, ультразвуковой источник и проекцию интересующего объекта в информации рентгеновского изображения. Система для получения ультразвуковых изображений содержит рентгеновскую систему, имеющую рентгеновский источник и детектор рентгеновского излучения, и ультразвуковую систему. Система включает также машиночитаемый носитель. Использование изобретений позволяет расширить арсенал средств для отслеживания объекта при чреспищеводной эхокардиографии. 3 н. и 6 з.п. ф-лы, 3 ил.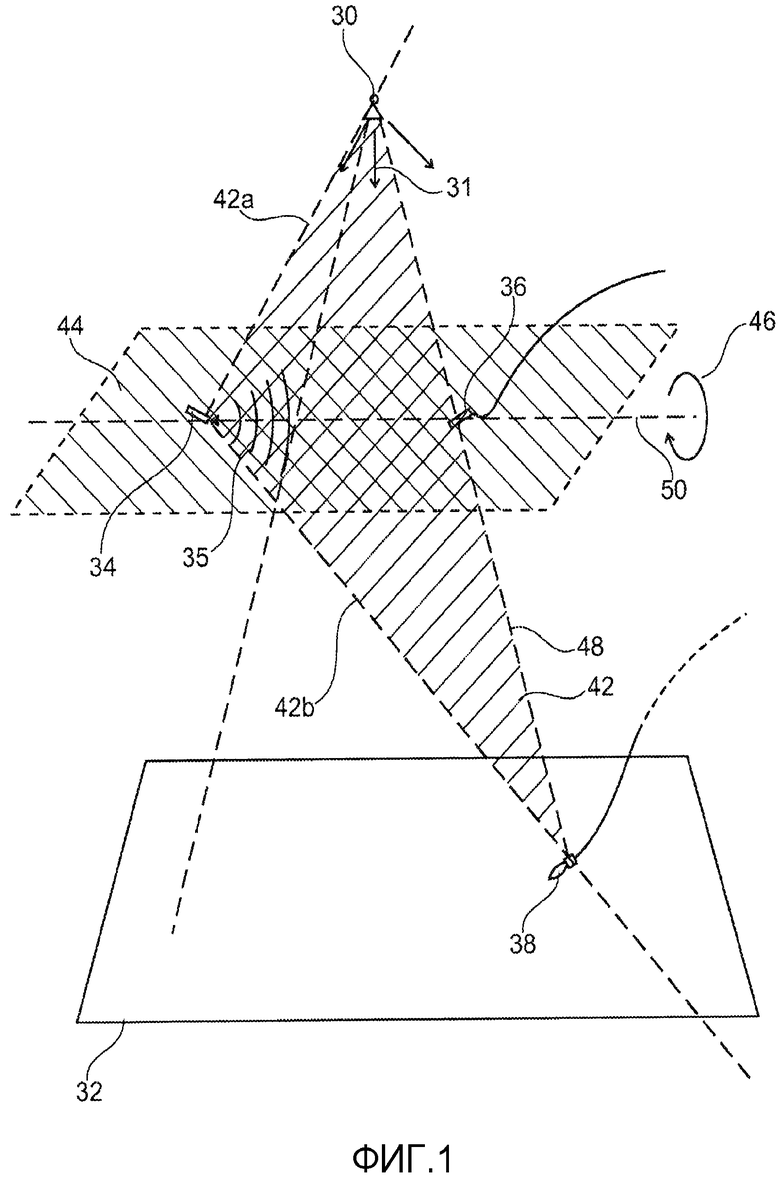
1. Способ (10) получения ультразвуковых изображений, в частности, для отслеживания интересующего объекта (36) по информации ультразвукового изображения, содержащий:
прием (12) информации (40) рентгеновского изображения и информации (42) ультразвукового изображения, причем взаимное пространственное расположение информации рентгеновского изображения и информации ультразвукового изображения задано;
обнаружение (14) интересующего объекта (36) по информации (40) рентгеновского изображения;
управление (16) получением двумерного ультразвукового изображения так, чтобы интересующий объект (36) находился в первой плоскости (42) ультразвукового изображения; и
при этом первая плоскость (42) ультразвукового изображения содержит рентгеновский источник (30), ультразвуковой источник (34) и проекцию (38) интересующего объекта (36) в информации (40) рентгеновского изображения.
2. Способ по п. 1, дополнительно содержащий:
совмещение (18) информации (40) рентгеновского изображения и информации (42) ультразвукового изображения для получения пространственного соотношения между информацией (40) рентгеновского изображения и информацией (42) ультразвукового изображения.
3. Способ по п. 1, дополнительно содержащий:
визуализацию (20) информации двумерного ультразвукового изображения в первой плоскости (42) ультразвукового изображения.
4. Способ по п. 1,
причем ультразвуковой источник (34) является ультразвуковым источником для чреспищеводной эхокардиографии (ЧЭхоКГ); и/или
при этом интересующий объект (36) является интервенционным устройством.
5. Способ по п. 1, дополнительно содержащий:
получение (22) второй информации (44) ультразвукового изображения, соответствующей второй плоскости (44) ультразвукового изображения, содержащей ультразвуковой источник (34) и интересующий объект (36), так что имеется степень свободы для ориентации второй плоскости (44) ультразвукового изображения.
6. Способ по одному из предшествующих пунктов, дополнительно содержащий:
регулирование (24) толщины по меньшей мере одной из первой плоскости (42) ультразвукового изображения и второй плоскости (44) ультразвукового изображения так, чтобы интересующий объект (36) находился в по меньшей мере одной из соответствующих плоскостей (42, 44) изображения.
7. Система (54) для получения ультразвуковых изображений, в частности, для отслеживания интересующего объекта по информации ультразвукового изображения, содержащая:
рентгеновскую систему (33), имеющую рентгеновский источник (30) и детектор (32) рентгеновского излучения;
ультразвуковую систему (34);
причем система (54) предназначена для осуществления способа (10) по одному из предшествующих пунктов.
8. Система по п. 7, дополнительно содержащая:
процессорный элемент (56);
элемент (58) управления; и
блок (60) отображения.
9. Машиночитаемый носитель, на котором хранится компьютерная программа для получения ультразвуковых изображений, в частности, для отслеживания интересующего объекта по информации ультразвукового изображения, при этом упомянутая компьютерная программа, будучи выполняемой процессорным элементом, предназначена для осуществления способа (10) согласно по меньшей мере одному из пп. 1-6.
| US 2003074011 A1, 17.04.2003 | |||
| US 6529766 B1, 04.03.2003 | |||
| US 2010063400 A1, 11.03.2010 | |||
| WO 2011070477 A1, 16.06.2011 | |||
| СПОСОБ ДИАГНОСТИКИ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ, ЗВУКОВЫХ И ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 2007 |
|
RU2378989C2 |

