Изобретение относится к радионавигации и может быть использовано в локальных навигационных системах в условиях пересеченной местности и отсутствия сигналов глобальной спутниковой навигационной системы.
Известна локальная радионавигационная система (ЛРНС) компании ООО «Веда Проект», представляющая собой наземное дополнение к системе ГЛОНАСС на основе псевдоспутников (см. Проект «Псевдоспутник». URL: http://www.vedapro.ru/pseudo.php (дата обращения 01.12.2011). Данная система предназначена для обеспечения высокоточной навигации в условиях отсутствия сигналов ГНСС GPS / ГЛОНАСС. В ней предусмотрено использование стандартного оборудования (навигационных приемников ГНСС) с минимальными программными изменениями, но с внешним конвертором, позволяющим менять диапазон используемых частот.
Недостатками ЛРНС на основе псевдоспутников компании ООО «Веда Проект» являются:
низкая устойчивость к имитационным помехам, так как в системе используют известные коды сигналов ГНСС;
аналог теряет свою работоспособность в условиях пересеченной местности;
возможность любого несанкционированного пользователя, имеющего соответствующий навигационный приемник, использовать данную систему для навигации.
Известный способы определения местоположения объектов в соответствии с патентами РФ: №2510046, МПК G01S 19/00, опубл. 20.03.2014; №2606240, МПК G01S 5/14, опубл. 10.01.2017; №2602833, МПК G01S 21/00, опубл. 20.11.2016 и др., которые обеспечивают высокую точность определения местоположения мобильных объектов. Однако при их реализации высокие точностные характеристики достигаются на ограниченной области пространства (над взлетной площадкой корабля, аэродрома и т.д.).
Известен обращенный разностно-дальномерный способ определения координат (см. Кинкулькин И.Е., Рубцов В.Д., Фабрик М.А., Фазовый метод определения координат. - М.: Сов. радио, 1979. - С. 10-11 и 97-100; Смирнов Ю.А. Радиотехническая разведка. - М.: Воениздат, 2001. - 456 с.).
Способ заключается в одновременном излучении объектом навигации (ОН) и передатчиком центрального пункта (ЦП), установленным в неподвижной точке с известными координатами, непрерывных гармонических высокочастотных сигналов и одновременном приеме этих сигналов в нескольких опорных пунктах (ОП). Далее на их основе в ОП формируют сигналы разностной частоты, которые передают на ЦП для определения координат объекта навигации.
Однако, аналогу присущи недостатки:
предполагает непрерывное излучение сигналов передатчиком ЦП, что ухудшает условия электромагнитной совместимости оборудования в условиях одновременного приема и передачи двух сигналов с близкими частотами, ухудшает информационную безопасность системы навигации и облегчает возможность блокировки ее работы;
небольшое размеры области пространства, в пределах которой возможно однозначное определение координат объекта навигации с высокой точностью;
аналог теряет свою работоспособность в условиях пересеченной местности. Наиболее близким по технической сущности к заявленному является «Способ определения местоположения объекта навигации» (см. Пат. РФ №2676862, МПК G01S 13/00 (2006.01), опубл. 11.01.2019).
Способ-прототип заключается в излучении объектом навигации в течение заданного интервала времени Δt двух высокочастотных гармонических сигналов S1(t) и S2(t), частоты которых w1 и w2 отличаются на определенную величину  , приеме сигналов S1(t) и S2(t) в i, i ≥ З, опорных пунктах с известными координатами и размещенными на квадрокоптерах на определенной высоте hi измерении на центральном пункте с известными координатами разности фаз сигналов Δϕij разностной частоты
, приеме сигналов S1(t) и S2(t) в i, i ≥ З, опорных пунктах с известными координатами и размещенными на квадрокоптерах на определенной высоте hi измерении на центральном пункте с известными координатами разности фаз сигналов Δϕij разностной частоты  , где i, j - номера опорных пунктов, i ≥ З, i = 1, 2, …, j, …, а измерение разности фаз сигналов Δϕij и
, где i, j - номера опорных пунктов, i ≥ З, i = 1, 2, …, j, …, а измерение разности фаз сигналов Δϕij и  на разностных частотах
на разностных частотах  и
и  , полученных от i-го и j-го опорных радионавигационных пунктов, осуществляют путем перемножения разностных сигналов
, полученных от i-го и j-го опорных радионавигационных пунктов, осуществляют путем перемножения разностных сигналов  и
и  , для чего определяют среднюю мощность
, для чего определяют среднюю мощность  составляющей шума смеси одного из входных радиосигналов
составляющей шума смеси одного из входных радиосигналов  или
или  и вычитают ее из низкочастотной составляющей результирующего сигнала Рс, фиксации результатов измерений Δϕij, i ≥ З, повторном выполнении названных операций с изменением частоты w2 на
и вычитают ее из низкочастотной составляющей результирующего сигнала Рс, фиксации результатов измерений Δϕij, i ≥ З, повторном выполнении названных операций с изменением частоты w2 на  второго гармонического сигнала S2(t) таким образом, чтобы новая разностная частота
второго гармонического сигнала S2(t) таким образом, чтобы новая разностная частота  увеличилась на порядок, а длительность излучения нового сигнала
увеличилась на порядок, а длительность излучения нового сигнала  выбирают из условия достаточности для измерения разности фаз сигналов
выбирают из условия достаточности для измерения разности фаз сигналов  разностных частот
разностных частот  и
и  , все зафиксированные величины разностей фаз пересчитывают в координаты объекта навигации с учетом взаимного расположения центрального пункта и опорных пунктов.
, все зафиксированные величины разностей фаз пересчитывают в координаты объекта навигации с учетом взаимного расположения центрального пункта и опорных пунктов.
Прототип обеспечивает работоспособность в условиях пересеченной местности и отсутствия сигналов глобальной навигационной спутниковой системы в сложной сигнально-помеховой установке.
Однако прототипу присущи недостатки, ограничивающие его применение: возможность любого несанкционированного пользователя, имеющего соответствующий навигационный приемник, использовать данную систему для навигации;
точность позиционирования и синхронизации в системе обеспечивается точным измерением разности фаз сигналов Δϕij разностной частоты двух высокочастотных гармонических сигналов S1(t) и S2(t). Но фазы этих сигналов легко сбиваются под действием помех любой физической природы;
низкая помехоустойчивость системы вследствие известности номиналов частот, используемых в системе.
Целью заявляемого технического решения является расширение функциональных возможностей локальной навигационной системы (ЛНС), обеспечивающей высокую защищенность к имитационным помехам и несанкционированному доступу в систему в условиях пересеченной местности, отсутствия или искажения сигналов ГНСС и воздействия преднамеренных помех.
Поставленная цель достигается тем, что в известном способе определения местоположения объекта навигации, заключающемся в размещении в заданном районе I, I ≥ З, опорных пунктов (ОП) на квадрокоптерах и центрального пункта (ЦП) с известными координатами, и обеспечении надежной радиосвязи по каналу между I ОП и объектом навигации и индивидуальным каналам связи между ОП и ЦП, источниками навигационных сигналов являются I ОП, которые передают одновременно на ЦП и объект навигации, а каждый абонентский терминал представляет собой ретранслятор совокупности сигналов I опорных пунктов, принятых на одной общей частоте и передаваемых на ЦП, на основе сигналов ретранслятора обслуживаемого абонента и сигналов I ОП, передаваемых на ЦП, определяют координаты объекта с использованием асинхронного разностно-дальномерного способа путем выравнивания шкалы времени ОП на ЦП, определения расстояния между ЦП и I ОП Ri между ЦП ОН Rs, определения расстояния Di между i-м ОП и ОН, i = 1, 2, …, I, коррекции шкалы времени ОП, и нахождения координат  в соотвествии с выражением
в соотвествии с выражением
 ,
,
где
diц = Di + Rs - Ri + nj, nj - ошибка измерений с нулевым средним, j = 1, 2, …, j, причем в качестве навигационного сигнала используют индивидуальные для каждого ОП и известные на ЦП импульсные последовательности с изменяемым периодом повторения импульсов, не требующие синхронизации между собой, а синхронизацию передатчиков ОП выполняют в процессе работы путем выравнивания шкалы времени на ЦП.
При этом в качестве навигационных сигналов используют импульсную последовательность с вобуляцией периода повторения импульсов, начало излучения которой для каждого ОП сдвинуто по времени на величину, равную времени прохождения сигнала от ОП до ЦП.
Измерение разности времени прихода прямого от ОП и ретранслированного от объекта навигации сигналов осуществляют на основании показаний часов ЦП.
Благодаря новой совокупности существенных признаков в заявляемом способе обеспечивается эффективная работа ЛНС в условиях пересеченной местности, отсутствия сигналов ГНСС и воздействия преднамеренных помех. Положительный эффект достигается благодаря использованию асинхронного разностно-дальномерного способа определения координат, использованию индивидуальных для каждого пункта импульсных последовательностей с изменяемым периодом повторения импульсов и отсутствию требования о взаимной синхронизации работы ОП между собой, что обеспечивает высокую защищенность от имитационных помех и несанкционированного доступа в ЛНС.
Заявленный способ поясняется чертежами, на которых показаны:
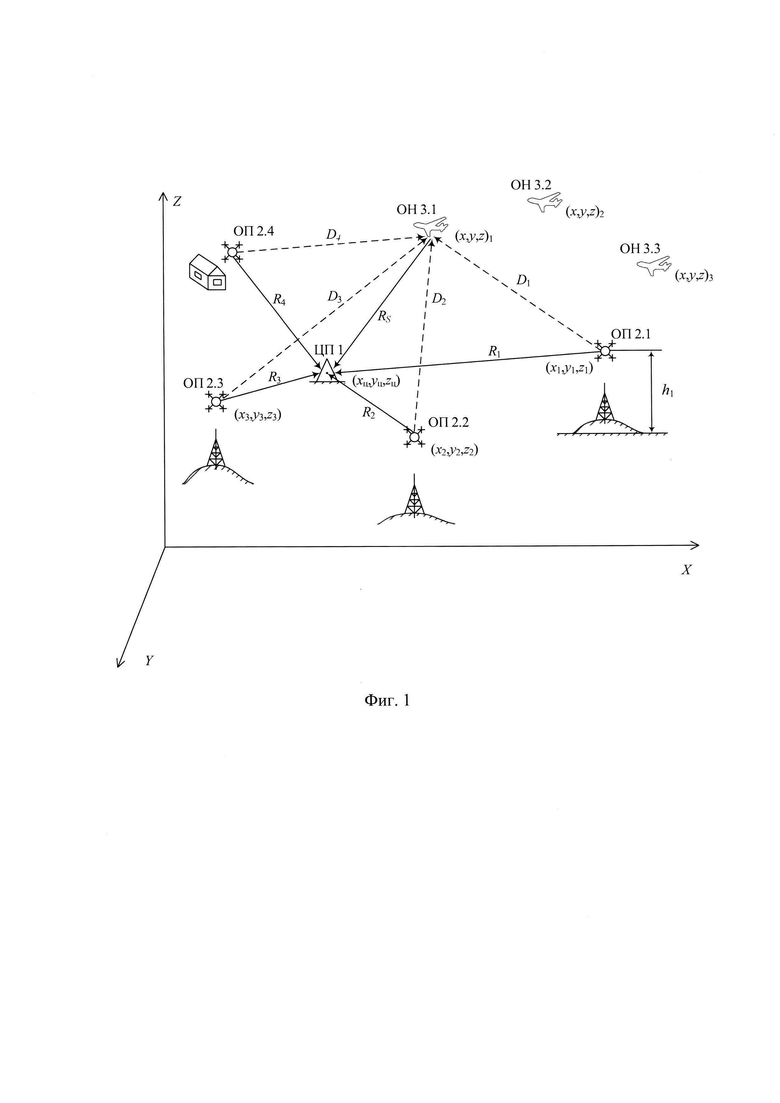
на фиг. 1 - взаимное расположение объектов навигации и элементов ЛНС;
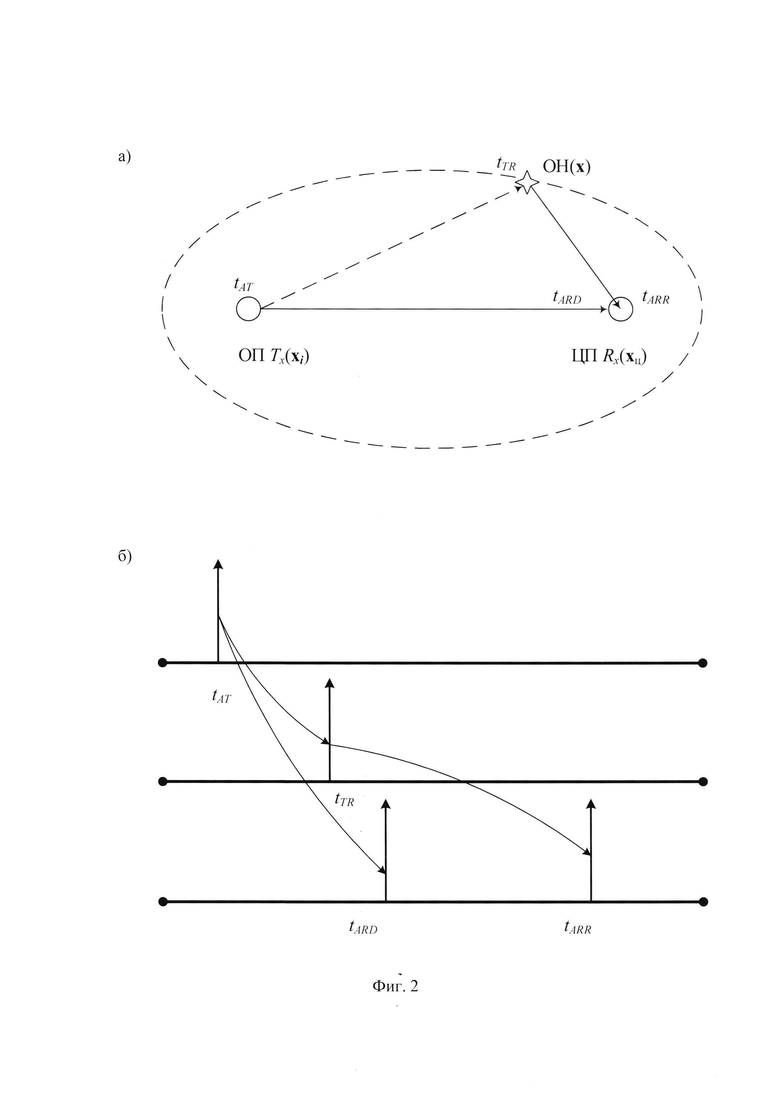
на фиг. 2 а, б - временные диаграммы сигналов, поясняющие асинхронный разностно-дальномерный способ определения координат;
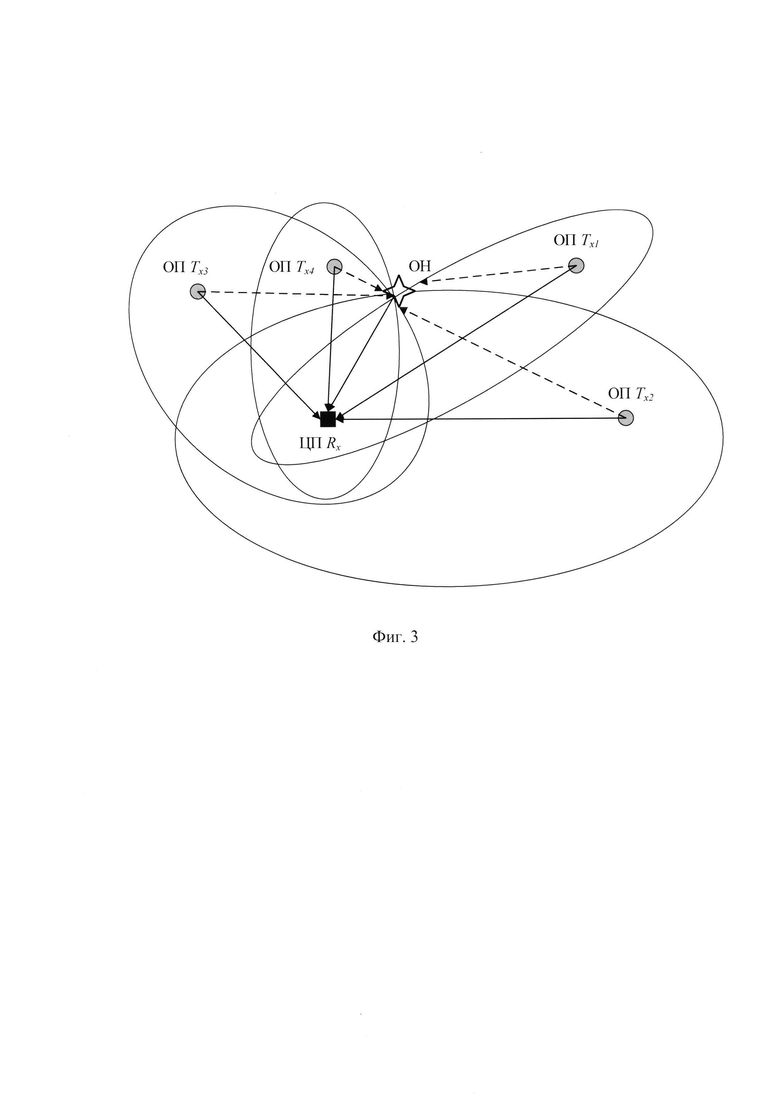
на фиг. 3 - приведены линии положения объекта при реализации асинхронного разностно-дальномерного способа определения координат;
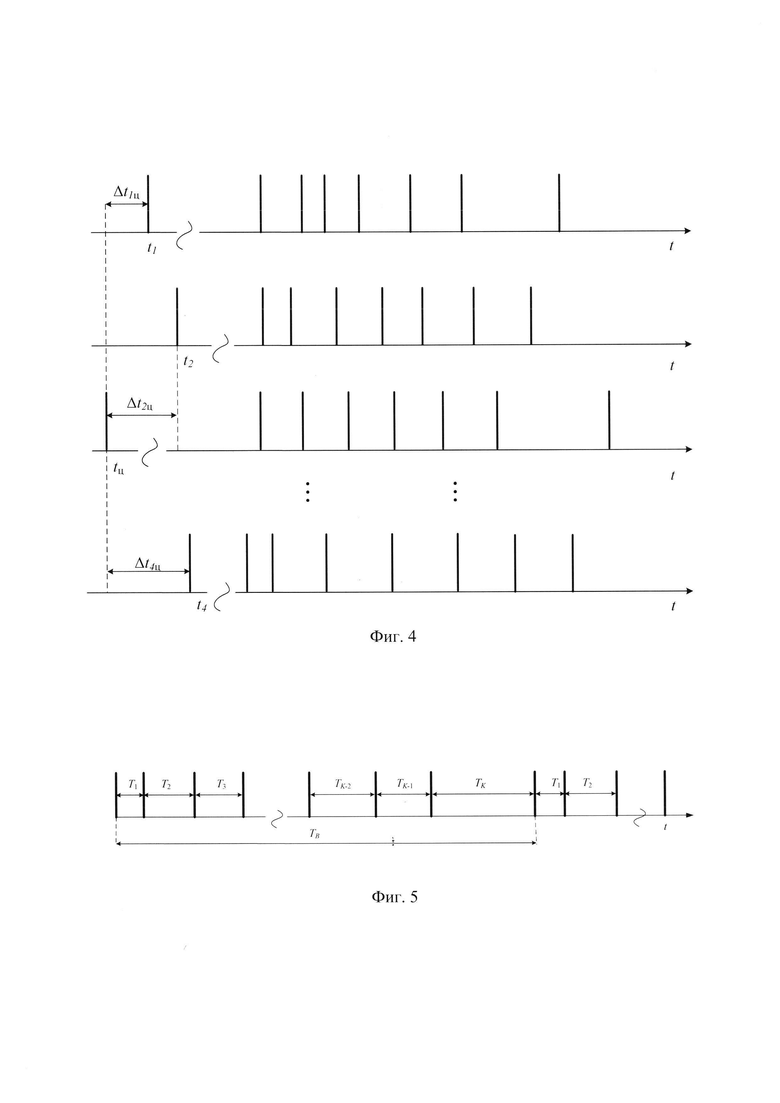
на фиг. 4 - поясняется сущность процедуры выравнивания шкалы времени передающих ОП;
на фиг. 5 - приведена структура импульсной последовательности с изменяемым периодом повторения импульсов;
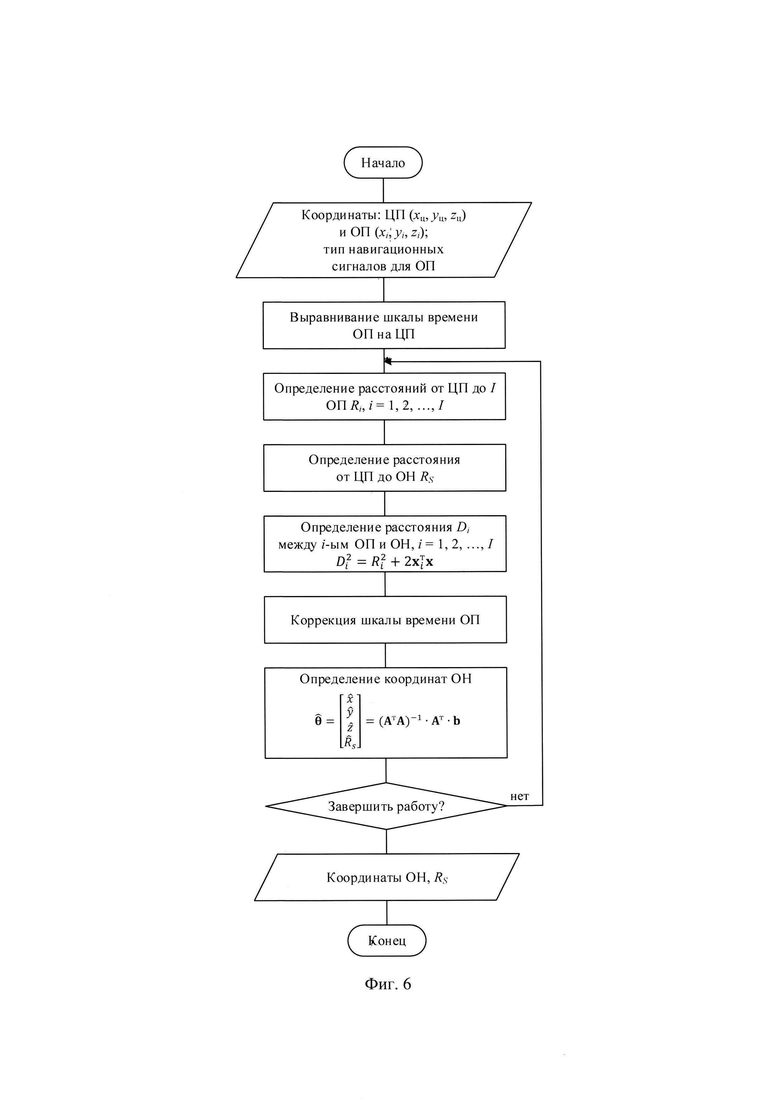
на фиг. 6 - алгоритм работы ЦП по определению координат ОН;
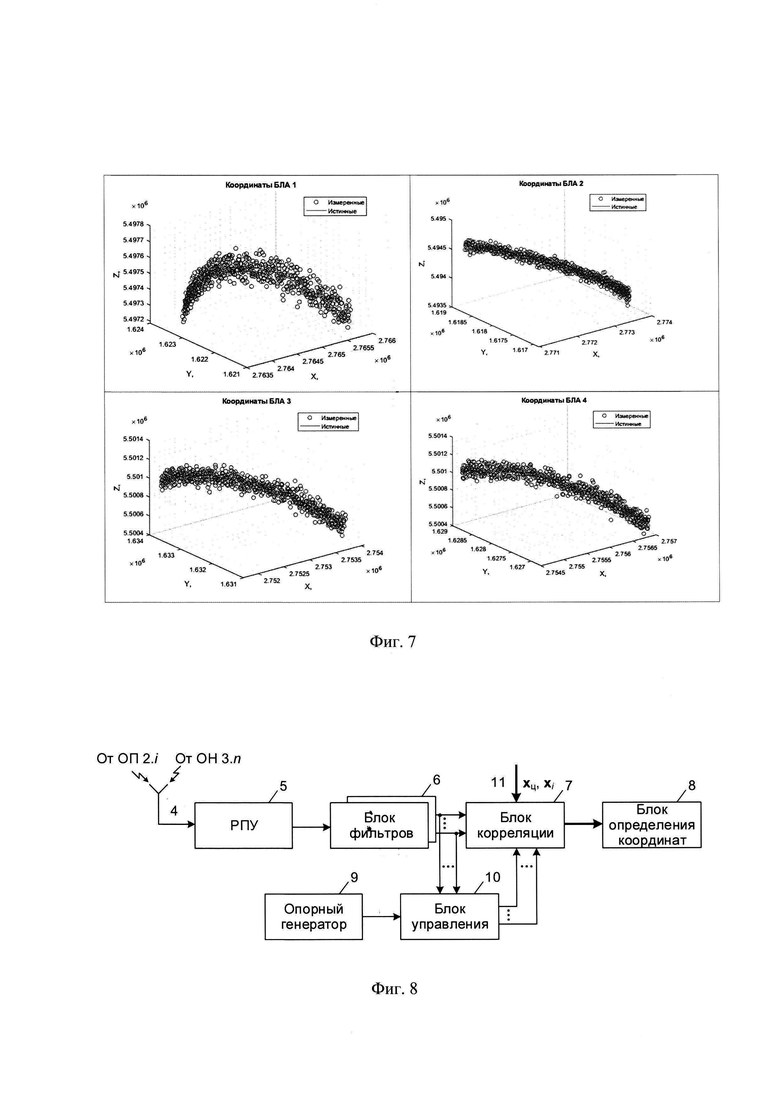
на фиг. 7 - графики изменения мгновенных оценок координат БЛА, полученные с использованием заявляемого способа;
на фиг. 8 - структурная схема центрального поста ЛНС.
С развитием современных технологий как в военной, так и в гражданской сфере все чаще находят применение БЛА для выполнения различных задач, в том числе РТК. В результате особую актуальность приобретает задача определения местоположения БЛА. В настоящее время определение координат объектов осуществляют на основе сигналов ГНСС, таких как ГЛОНАСС, GPS, Galileo и др. Они имеют развернутую инфраструктуру, могут использоваться в любой точке Земли и доступны гражданским потребителям. Необходимо только приемное устройство, работающее по сигналам одной или нескольких ГНСС. Однако существует широкий спектр задач координатно-временного и навигационного обеспечения, в том числе и применительно к ТРК, в которых определение координат места и времени по сигналам ГНСС невозможны или имеются высокие риски их срыва. В этих случаях актуальным является использование ЛНС, обеспечивающих надежное и с высокой точностью определение координат объектов навигации. А в качестве последних могут выступать БЛА, самолеты и вертолета, автотранспорт и др.
Сущность заявляемого способа определения координат объекта навигации состоит в следующем.
На подготовительном этапе (см. фиг. 1) задают местоположение ЦП 1 и каждого ОП 2.1 - 2. I, i = 3, 4, …, I. Последние целесообразно размещать по периметру локальной зоны навигации для достижения максимально возможной точности измерений в заданном районе, которая базируется на геометрическом факторе их пространственного размещения. Так при наличии четырех ОП 2.1-2.4 оптимальным является их расположение в вершинах квадрата (см. Кондратьев О.С., Котов А.Ф., Марков Л.Н. Многофункциональные радиотехнические системы. - М.: Радио и связь, 1986. - 264 с.). Для трех ОП оптимальным является их размещение в вершинах равнобедренного треугольника. В Пат. РФ №2676862 показано, что с увеличением количества ОП возрастает точность определения координат пользователя, однако увеличение числа ОП более пяти нецелесообразно. В Пат. РФ №2717231 сформулированы требования по взаимному расположению ЦП и ОП 2.i и точности определения их координат.
В условиях отсутствия сигналов ГНСС и дефицита времени, по аналогии с прототипом, в качестве точек для развертывания ОП целесообразно выбирать триангуляционные знаки, составляющие опорную географическую сеть страны, трубы предприятий, развязки дорого и другие пространственно контрастные точки с априорно известными координатами. Оператор ЦП выполняет анализ рельефа местности в заданном районе определяет необходимую высоту hi зависания каждого ОП (размещаемого на квадрокоптере) для обеспечения прямой видимости на интервалах связи ОП - ЦП и ОП-пользователь ЛНС. В случае отсутствия необходимости подъема ОП, hi = 0, оборудование опорного пункта размещают на земле.
После определения районов размещения и hi все ОП выдвигаются в заданные точки по командам с ЦП, где зависают на определенной высоте. Для облегчения функции управления с бортов квадрокоптеров осуществляют трансляцию видеоизображения на ЦП во время их полета в заданные пространственные точки.
Следующей задачей, стоящей перед каждым ОП, является точное занятие пространственного местоположения (по видеоизображению над заданное точкой) и постоянная его коррекция из-за воздействий различного рода дестабилизирующих факторов, например, ветровой нагрузки. Может выполняться автоматически с помощью блока управления квадрокоптера по видеоизображению, так и опосредовано, по сигналам управления ЦП. От качества выполнения этой операции в значительной степени зависят точностные характеристики заявляемого способа. Уточнение текущих координат ОП 2 может осуществляться в соответствии с Пат. РФ №2790348, МПК G01S 3/46.
Рассмотрим заявляемый способ на примере определения координат одного ОН (БЛА). Пусть х = [х, у, z]T и xi = [xi, уi, zi]T - координаты БЛА и I опорных пунктов соответственно,  . Без потери общности обозначим место ЦП 1 как xц.
. Без потери общности обозначим место ЦП 1 как xц.
На фиг. 2 а, б приведен порядок прохождения импульсных сигналов в ЛНС, а на фиг. 6 - порядок работы ЦП по определению координат ОН. В момент времени tAT ОП 2.i излучает импульс, который принимает БЛА 3 в момент времени tTR и ЦП 1 в момент времени tARD. Принятый БЛА 3 импульс сразу же переизлучается. Ретранслированный БЛА 3 сигнал принимает ЦП 1 в момент времени tARR. В результате ЦП 1 принимает два импульса, отстоящие друг от друга на величину задержки, один от ОП 2.i, другой от БЛА 3.
Расстояние, соответствующее этой задержке, можно определить из выражения

где nj - ошибка измерения с нулевым средним, j = 1, 2, …, J.
Выражение 1 отражает суть асинхронного разностно-дальномерного способа (А-РДС), при котором измеряют задержку сигналов (tARR - tARD) только в ЦП 1, а при этом не требуется синхронизация между сигналами ОП 2.i (см. F. Bandiera, A. Coluccia, G. Ricci, F. Ricciato, D. Spano. TDOA localization in asynchronous WSNs. 2014 12th IEEE International Conference on Embedded and Ubiquitous Computing // 20.4 IEEE DOI 10.11.09/EUC.2014, p. 193-196). На фиг. 1 и 2 сплошной линией показан прямой путь сигналов между передатчиком ОП 2.i и приемником ЦП 1, путь ретранслированного через объект навигации 3 сигнала ОП 2.i в направлении приемника ЦП 1, а пунктиром - путь сигналов ОП 2 на ОН 3. Преобразуем выражение (1) к виду

Из выражения (2) видно, что сумма расстояний от объекта навигации с координатами х к двум пунктам с координатами xi и хц есть величина постоянная, равная  к измеренному расстоянию (tARR - tARD) ⋅ с. Из этого следует, что координаты БЛА находятся на эллипсе, а ЦП 1 и ОП 2.i являются его фокусами (см. фиг. 3). Задачу определения координат объекта навигации А-РДС можно описать следующим образом. Пусть ЦП 1 является началом системы координат, т.е. хц = [0,0,0]. Расстояние от ЦП 1 до передатчика i-го ОП 2.i обозначим как Ri а до БЛА Rs. Здесь
к измеренному расстоянию (tARR - tARD) ⋅ с. Из этого следует, что координаты БЛА находятся на эллипсе, а ЦП 1 и ОП 2.i являются его фокусами (см. фиг. 3). Задачу определения координат объекта навигации А-РДС можно описать следующим образом. Пусть ЦП 1 является началом системы координат, т.е. хц = [0,0,0]. Расстояние от ЦП 1 до передатчика i-го ОП 2.i обозначим как Ri а до БЛА Rs. Здесь  , i = l, 2, …, I,
, i = l, 2, …, I,  , х = [х, у, z] - неизвестные координаты БЛА. В свою очередь расстояние между объектом навигации (БЛА) и передатчиком ОП 2.i определим как
, х = [х, у, z] - неизвестные координаты БЛА. В свою очередь расстояние между объектом навигации (БЛА) и передатчиком ОП 2.i определим как

а выражение (1) перепишем в виде

Из выражения (4) определяют оценку 

а на основе теоремы косинусов находят истинное значение расстояния между объектом навигации и i-м ОП 2.i

Воспользовавшись (6) запишем целевую функцию ошибки позиционирования объекта навигации в виде

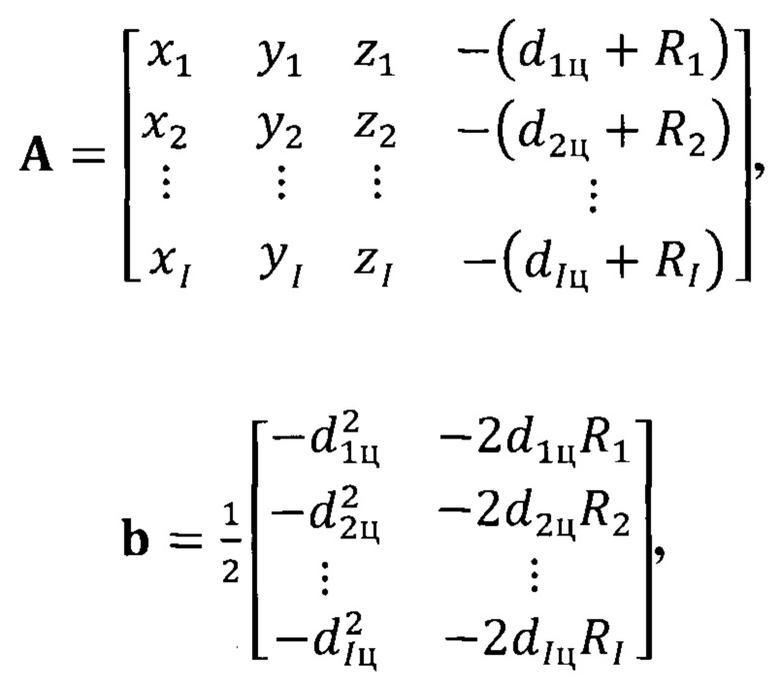
В векторной форме выражение (7) примет вид

где
Оценка исходного параметра θ может быть осуществлена путем осуществлена минимизации целевой функции (8) методом Ньютона-Гаусса (см. Ортега Д. Итерационные методы решения нелинейных систем уравнений со многими неизвестными / Д. Ортега, В. Рейнболдт. - М.: Мир, 1975. - 558 с.; Кононыкина Н.А., Федотов Ю.П. Эффективный алгоритм и программа определения местоположения объектов для системы многопозиционной радионавигации // Теория и техника радиосвязи, вып. 1. - Воронеж, 1997, с. 61-73)

Выражение (12) позволяет оценить вектор координат объекта навигации при наличии начального приближения и I измерений разностей дальности от I передатчиков ОП 2.
В заявленном способе все импульсные последовательности, формируемые ОП 2, имеют уникальную структуру интервалов следования импульсов и периодом водуляции Тв равным 1 сек (см. фиг. 5). Закон вобуляции для каждого ОП 2.i, i = 1, 2, …, I, задают период перед началом работы. Расчет координат объекта навигации и задание законов вобуляции для каждого СП 2.i, осуществляют на ЦП 1.
Применение квадрокоптеров в качестве ОП 2.i в совокупности А-РДС позволяет организовать структуру ЛНС с адаптивной конфигурацией. В системе реализована возможность изменения количества пользователей в процессе ее функционирования, позволяет обойтись без реализации процедуры предварительной синхронизации часов на ОП 2.i. В предлагаемом ЛНС предусмотрена возможность своевременно реагировать на необходимость изменения ее границ путем перемещения ОП 2.i на квадрокоптерах в новые районы по командам ЦП 1, введение в структуру ЛНС дополнительных ОП.
Использование на каждом ОП 2.i сигналов уникальной временной структурой следования импульсов повышает устойчивость ЛНС к имитационным помехам, исключается возможность любого несанкционированного доступа в систему.
При наличии на борту объекта навигации дополнительного оборудования (видового, радио, радиотехнического и др.) в рамках ЛНС возможно решение задач различных видов мониторинга. При этом время цикла навигации составляет 200 мс, а радиотехнического контроля 800 мс.
Предлагаемый способ позволяет определять местоположение одновременно нескольких ОН. На фиг. 1 приведен вариант реализации ЛНС из четырех ОП и трех ОН, координаты которых необходимо определить. Объекты навигации двигаются по некоторой траектории на удалении друг от друга порядка 10-30 км. В каждый момент времени сумма расстояний  ОП-ОН-ЦП будет различна. Здесь индексы i, n обозначают номер ОП и ОН. В соответствии с выше рассмотренной последовательностью действий будут сформированы три группы расстояний (по числу ОН), а именно,
ОП-ОН-ЦП будет различна. Здесь индексы i, n обозначают номер ОП и ОН. В соответствии с выше рассмотренной последовательностью действий будут сформированы три группы расстояний (по числу ОН), а именно,  ,
,  ,
,  ,
,  , n = 1, 2, 3. Сортировку групп расстояний осуществляют по максимальному количеству пересечений (равному четырем) эллипсов в одной точке.
, n = 1, 2, 3. Сортировку групп расстояний осуществляют по максимальному количеству пересечений (равному четырем) эллипсов в одной точке.
Для обеспечения однозначного взаимного расположения сигналов на шкале времени (последовательность прихода импульсов ОП 2.i в ЦП 1), а также исключения их одновременного прихода, выполняют коррекцию шкал времени ОП. Последнюю осуществляют путем вычисления величины рассогласования моментов времени отсчета импульсов последовательностей, генерируемых ОП 2. Это необходимо из-за того, что передатчики ОП 2 работают несинхронно. Результат сравнения, определяемый как разность ti - tц = Δtiц; i = 1, 2, 3, 4, дает величину расхождения шкалы времени i-ых ОП относительно времени tц ЦП 1. Значение Δtiц определяет индивидуальную поправку для шкалы времени передатчика соответствующего i-го ОП.
Коррекцию шкалы времени осуществляют в течении определенного временного интервала и в начале работы. В процессе работы данную операцию выполняют с целью учета ухода частоты передатчиков ОП 2 внутри секундного интервала. Названную операцию осуществляют на основании показаний часов ЦП 1.
Способ может быть реализован следующим образом. В качестве носителя ОП 2 по аналогии с прототипом моет быть использован гексакоптер производства Общества с ограниченной ответственностью «Специальный Технологический Центр», г. Санкт-Петербург (см. электронный ресурс http://www.stc-spb.ru). В качестве блока управления и видеокамеры целесообразно использовать серийно выпускаемую роботизированную скоростную купольную камеру «Speed Dome Ultra» (серия 35х). Имеет монтажное основание, защищенный корпус, 35-кратное оптическое масштабирование, автоматическую фокусировку, EIS (электронный стабилизатор изображения), управляется через протокол RS-422. Дистанционное управление коррекцией местоположения ОП 2 с ЦП 1 может осуществляться в соответствии с Пат РФ №2465613, МПК G01S 3/14. Самостоятельная коррекция местоположения ОП 2 возможна на основе использования отредактированной системы управления, рассмотренной в Пат. РФ №2550811, МПК G01S 13/46. Каждый ОП 2 содержит синтезатор частоты (микросхема ADF4360-5), опорный генератор (NT 3225SA) и блок управления для задания навигационного сигнала (индивидуальной импульсной последовательности с изменяемым периодом повторения импульсов).
Абонентский терминал объекта навигации 3 представляет собой ретранслятор совокупности сигналов I ОП 2, передаваемых на одной общей частоте. В качестве носителя ОН 3 может быть использован БЛА «Орлан 10» производства ООО «СТЦ» г. Санкт-Петербург.
На фиг. 8 приведена обобщенная структурная схема ЦП 1. Центральный пункт 1 содержит последовательно соединенные антенну 4, радиоприемное устройство 5, блок фильтров 6, блок коррекции 7 и блок определения координат 8, последовательно соединенные опорный генератор 9 и блок управления 10, группа выходов которого соединена со второй группой входов блока коррекции 7, вторая группа входов блока управления 10 объединена с группой выходов блока фильтров 6, а третья группа входов блока 7 является входной установочной шиной 11 устройства.
Работа ЦП 1 осуществляется следующим образом. Сигналы от N ОН 3 и I ОП 2 принимаются с помощью антенны 4 и радиоприемного устройства 5. Перемешавшись во времени импульсные последовательности с выхода блока 5 поступают на вход блока фильтров 6. В последнем выполняют разделение смешанного потока импульсов по периоду их повторения. На выходе блока 6 формируется 2 NI групп последовательностей (на каждый ОН 3 соответственно 2I) импульсов.
В блоке управления 10 на основе сигналов блоков 9 и 6 определяют значения величины рассогласования моментов времени отсчета импульсов последовательностей, генерируемых ОП 2.i, i = 1, 2, …, I, и опорным генератором 9 ЦП 1. Значения величины рассогласования для 2 NI последовательностей импульсов поступают на вторую группу входов блока коррекции 7. В его функцию входит уточнение временных положений импульсных последовательностей, поступающих на его первую группу входов с выходов блока 6. Кроме того, в блоке 7 определяют взаимные расстояния между n-м ОН 3.n и i-м ОП 2.i, i = 1, 2, …, I, n = 1, 2, …, N в соответствии с (5). Значения координат ЦП 1 хц и ОП 2 xi; поступают по входной установочной шине 11 на третью группу входов блока 7.
Найденные в блоке 7 значения  и Di далее поступают на группу входов блока определения координат 8. В функции блока 8 входит определение текущих координат N ОН 3 в соответствии с выражением (12). Результаты измерений
и Di далее поступают на группу входов блока определения координат 8. В функции блока 8 входит определение текущих координат N ОН 3 в соответствии с выражением (12). Результаты измерений  в заданной форме с указанием текущего времени с выхода ЦП 1 передают потребителю информации.
в заданной форме с указанием текущего времени с выхода ЦП 1 передают потребителю информации.
Дополнительно в ЦП 1, представленном на фиг. 8, используется подсистема управления ОП 2, обеспечивающая выведение всех ОП 2 на квадрокоптерах в заданные точки пространства по каналам радио- видеосвязи, контроль их текущего местоположения и работоспособность.
Оценка качества позиционирования объектов навигации выполнена с использованием разработанной модели ЛНС на базе асинхронного РДС, состоящей из четырех ОП, ЦП с известными координатами и четырех ОН (БЛА), координаты которых требовалось определить на интервале времени их полета t = 60 сек (см. фиг. 7). Расстояние между ОП и группы БЛА составило от 50 до 70 км, а между БЛА Δ1,2= 8,6 км, Δ1,3= 16,5 км, Δ1,4= 11,5 км, Δ2,3= 25,1 км, Δ2,4= 20,1 км, Δ3,4= 5,6 км. Удаление ЦП от ОП составило примерно 15 км. Измерения проводились с дискретностью 1 сек. Результаты измерений оформлены в виде графиков мгновенных значений координат БЛА. Результаты приведены на фиг. 7. При этом полагалось, что ошибки позиционирования ОП и ЦП отсутствовали.
Анализ полученных результатов показывает возможность позиционирования группы объектов навигации асинхронным разностно-дальномерным способом с погрешностью по осям координат х, у, z не хуже значений 29 м, 20 м и 47 м соответственно при их значительном, до 70 км, удалении от элементов ЛНС. При нахождении ОН в зоне, ограниченной координатами ОП, ошибки измерений по осям х, у, z не превышают 20 см при условии отсутствия погрешностей в определении собственных координат ЦП и ОП.
Применение А-РДС определения координат ОН в совокупности с использованием в качестве навигационных сигналов индивидуальных для каждого ОП импульсных последовательностей с изменяемым периодом их повторения позволяет обеспечить высокую защищенность к имитационным помехам. Расчет координат ОН выполняется на ЦП, что исключает несанкционированный доступ в ЛНС.
Достоинствами предложенного способа определения местоположения объекта навигации являются:
высокая помехозащищенность от преднамеренных помех, процессы синхронизации сигналов ОП решаются непосредственно на ЦП;
высокая мобильность при оптимизации размещения элементов ЛНС (ОП) в соответствии с текущими изменениями запросов потребителей за счет использования ОП на квадрокоптерах;
расширение зоны обслуживания ЛНС за счет приподнятых на заданную высоту ОП (увеличения электромагнитной доступности на ОН сигналов ОП).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения объекта навигации | 2018 |
|
RU2676862C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, комплексированная с инерциальной навигационной системой, обеспечивающая высокоточное позиционирование движущихся объектов | 2023 |
|
RU2802322C1 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| Способ локальной радионавигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем | 2021 |
|
RU2770127C1 |
| Система обнаружения и противодействия беспилотным воздушным судам | 2023 |
|
RU2809997C1 |
| Способ навигации с использованием радионавигационных опорных станций и опорная станция для его осуществления | 2023 |
|
RU2837598C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ | 2021 |
|
RU2775155C1 |
| Способ навигации с использованием абонентского терминала и абонентский терминал | 2023 |
|
RU2837647C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИМПУЛЬСНЫХ РАДИОСИГНАЛОВ | 2018 |
|
RU2695321C1 |
Способ относится к радионавигации и может быть использован в локальных навигационных системах (ЛНС) в условиях пересеченной местности и отсутствия сигналов глобальной навигационной спутниковой системы (ГНСС). Техническим результатом является высокая защищенность к имитационным помехам и несанкционированному доступу в систему, возможность функционирования ЛНС в условиях пересеченной местности, отсутствия или искажения сигналов ГНСС. В заявленном способе осуществляют поднятие опорных пунктов (ОП) ЛНС над поверхностью Земли на квадрокоптерах, определение координат объектов навигации на основе асинхронного разностно-дальномерного способа с использованием в качестве навигационного сигнала индивидуальных для каждого ОП и известных на центральном пункте (ЦП) импульсных последовательностей с изменяемым периодом повторения импульсов и не требующих синхронизации между собой, а синхронизацию сигналов ОП выполняют в процессе работы путем выравнивания шкалы времени на ЦП. 2 з.п. ф-лы, 8 ил.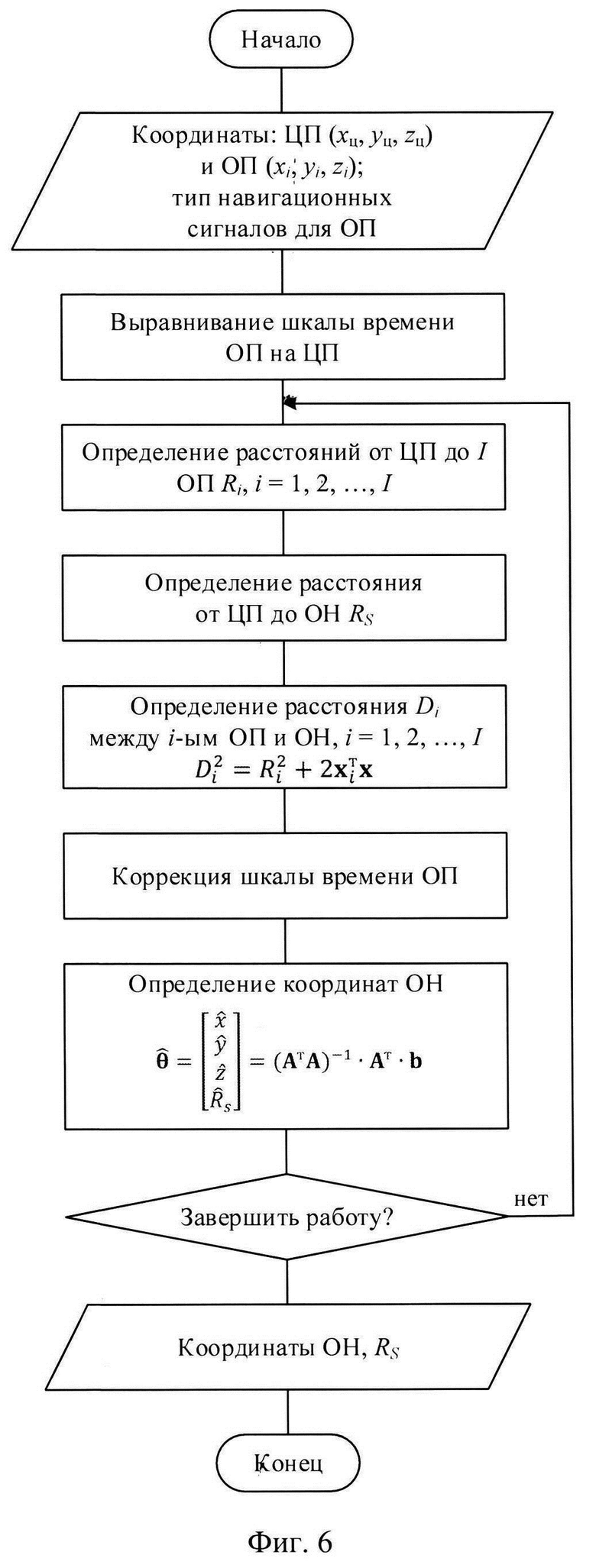
1. Способ определения местоположения объекта навигации, заключающийся в размещении в заданном районе I, I ≥ 3, опорных пунктов (ОП) на квадрокоптерах и центрального пункта (ЦП) с известными координатами, и обеспечении надежной радиосвязи по каналу между I ОП и объектом навигации (ОН) и индивидуальным каналам связи между ОП и ЦП, отличающийся тем, что источниками навигационных сигналов являются I ОП, которые передают их одновременно на ЦП и объект навигации, а каждый абонентский терминал представляет собой ретранслятор совокупности сигналов I опорных пунктов, принятых на одной общей частоте и передаваемых на ЦП, на основе сигналов ретранслятора обслуживаемого абонента и сигналов I ОП, передаваемых на ЦП, определяют координаты объекта с использованием асинхронного разностно-дальномерного способа путем выравнивания шкалы времени ОП на ЦП, определения расстояния между ЦП и I ОП Ri, между ЦП и ОН Rs, определения расстояния Di между i-м ОП и ОН, i = 1, 2, …, I, коррекции шкалы времени ОП, и нахождения координат  в соответствии с выражением
в соответствии с выражением
 ,
,
где
diц = Di + Rs - Ri + nj, nj - ошибка измерений с нулевым средним, j = 1, 2, …, J, причем в качестве навигационного сигнала используют индивидуальные для каждого ОП и известные на ЦП импульсные последовательности с изменяемым периодом повторения импульсов, не требующие синхронизации между собой, а синхронизацию передатчиков ОП выполняют в процессе работы путем выравнивания шкалы времени на ЦП.
2. Способ по п. 1, отличающийся тем, что в качестве навигационных сигналов используют импульсную последовательность с вобуляцией периода повторения импульсов, начало излучения которой для каждого ОП сдвинуто по времени на величину, равную времени прохождения сигнала от ОП до ЦП.
3. Способ по п. 1, отличающийся тем, что измерение разности времени прихода прямого от ОП и ретранслированного от объекта навигации сигналов осуществляют на основании показаний часов ЦП.
| Способ определения местоположения объекта навигации | 2018 |
|
RU2676862C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2802323C1 |
| СИСТЕМА НАВИГАЦИИ БЛИЖНЕГО ПОЛЯ | 2012 |
|
RU2602833C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ДЛЯ СИСТЕМ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2015 |
|
RU2588057C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2047839C1 |
| US 10983223 B2, 20.04.2021 | |||
| WO 2015112038 A1, 30.07.2015. | |||

