Изобретение относится к вертолету, содержащему фюзеляж с продольной осью и приводимую во вращение вокруг приводной оси несущего винта головку несущего винта, содержащую по меньшей мере две лопасти, удерживаемые соответствующим валом.
В соответствии с современным уровнем техники вертолеты достигают максимальных скоростей примерно до 360 км/ч. При этом приводная ось несущего винта, вокруг которой вращаются лопасти, всегда совпадает с опорной осью несущего винта, вокруг которой закреплены валы лопастей. Опорная ось несущего винта механически образована валом несущего винта. При полете в режиме висения все точки на всех лопастях несущего винта, одинаково удаленные от его приводной оси, при одинаковой угловой скорости (измерение Z-1) имеют одинаковую скорость вращения (измерение L×Z-1), т.е. в одинаковое время проходят равные отрезки. При этом точки вблизи приводной оси несущего винта имеют меньшую скорость вращения, чем более удаленные от нее точки. Когда вертолет движется вперед с определенной поступательной скоростью, скорость вращения лопастей накладывается на поступательную скорость вертолета.
В дальнейшем система несущего винта названа «левовращающейся», и его лопасти при виде сверху на вертолет вращаются против часовой стрелки. Последующие указания направлений всегда относятся к виду сверху на вертолет с носовой частью, ориентированной в плоскости чертежа вверх. Фаза вращения лопасти несущего винта указывает текущее положение по отношению к его оси вращения.
В случае левовращающейся системы несущего винта поступательная скорость вертолета складывается со скоростью вращения лопасти с правой стороны, тогда как поступательная скорость вследствие противоположного движения лопасти вычитается из скорости вращения лопасти, чтобы получить скорость соответствующей лопасти над землей. За счет разного воздействия поступательной скорости вертолета на скорости лопастей над землей в зависимости от фазы их вращения возникает профиль скорости лопастей в соответствии с их положением. В случае левовращающейся системы несущего винта максимум этого профиля находится с правой стороны, а минимум - с левой. Эта разность тем больше, чем выше поступательная скорость вертолета. У несущих винтов с правой стороны преобладает, следовательно, более высокое сопротивление воздуха, а с левой стороны оно, напротив, меньше. Это приводит к разным сопротивлениям воздуха с правой и левой сторон. Оба эффекта можно компенсировать за счет изменения угла наклона лопастей относительно горизонтали до тех пор, пока не произойдет срыва воздушного потока из-за слишком большого сопротивления воздуха при (слишком) высокой скорости. Это является ограничивающим фактором для достижения более высоких поступательных скоростей.
Задачей изобретения является создание вертолета, с помощью которого можно было бы устранить ограничивающие недостатки и достичь более высокой максимальной поступательной скорости.
Эта задача решается, согласно изобретению, посредством вертолета рассматриваемого типа, отличающегося тем, что опорная осевая линия валов лопастей несущего винта выполнена с возможностью смещения перпендикулярно направлению своей протяженности относительно приводной осевой линии несущего винта.
За счет этого можно достичь согласования длин лопастей несущего винта по отношению к его приводной осевой линии в зависимости от поступательной скорости вертолета. Несущий винт содержит две или более лопастей, в частности две - шесть, преимущественно три, четыре или пять лопастей.
Относительно приводной осевой линии несущего винта с одной стороны лопасть эффективно удлиняется, что приводит к более высокой скорости вращения и, тем самым, также к более высокой скорости несущего винта над землей. Это происходит идеальным образом на той фазе вращения, на которой прежняя скорость несущего винта над землей уменьшилась из-за поступательной скорости вертолета. Существенно, однако, то, что соответственно с противоположной стороны скорость лопасти над землей уменьшается, а профиль скорости, тем самым, более компенсированный.
Преимущественно ось вращения и опорная осевая линия несущего винта могут быть выполнены отдельно друг от друга. За счет конструктивно отдельного выполнения согласование опорной осевой линии несущего винта с режимом полета может быть осуществлено просто и быстро.
Может быть предпочтительным выполнение опорной осевой линии несущего винта для смещения с одним компонентом перпендикулярно продольной оси фюзеляжа вертолета, в частности с возможностью смещения в обе стороны от продольной оси фюзеляжа, в частности перпендикулярно ей. Этим возможно согласование опорной осевой линии несущего винта с разными конструкциями вертолетов. В случае левовращающегося несущего винта, как уже упомянуто, профиль скорости его лопастей при высоких поступательных скоростях может быть компенсирован за счет смещения опорной осевой линии несущего винта в направлении полета влево. В случае правовращающегося несущего винта условия обратные. За счет того, что опорная осевая линия несущего винта выполнена с возможностью смещения в обе стороны, возможна компенсация разных профилей скорости различных типов вертолетов.
Может быть обеспечено, что ось несущего винта разделена на несколько частей. В частности, она может включать в себя по меньшей мере две подвижные относительно осевой линии несущего винта части и по меньшей мере одну неподвижную относительно головки несущего винта часть (опорная ось несущего винта и дополнительная опорная ось несущего винта в качестве подвижных частей и направляющая ось несущего винта в качестве неподвижной части). При этом головка несущего винта в по меньшей мере одной лопастной части может удерживать по меньшей мере две лопасти. Согласно одному предпочтительному варианту может быть обеспечена по меньшей мере одна дополнительная лопастная часть, конструкция которой может быть схожей с лопастной частью. Дополнительная лопастная часть/дополнительные лопастные части может быть/могут быть связана/связаны с лопастной частью. Этим обеспечивается то, что за счет смещения валов лопастей соответствующей лопастной части достигается соответственно нужное смещение дополнительных валов лопастей дополнительной лопастной части. Благодаря этому за счет движения направляющей лопасти оси несущего винта независимо от остальных компонентов достигается согласование положения лопастей с поступательной скоростью вертолета. Это касается также обеспечения встречных отклонений подвижных частей оси несущего винта. Для этого подвижные части оси несущего винта, например опорная и дополнительная опорная оси, могут быть выполнены с возможностью встречного отклонения, за счет чего валы и дополнительные валы лопастей могут быть подвижными противоположно по отношению друг другу.
Для упрощенного конструктивного выполнения множество частей оси несущего винта в осевом направлении следуют друг за другом.
Согласно одному предпочтительному варианту обеспечен синусоидальный регулятор, посредством которого ось несущего винта, ось симметрии которого является опорной осевой линией несущего винта, выполнена с возможностью смещения перпендикулярно последней. Синусоидальный регулятор соединен с валами лопастей косвенно или непосредственно и смещает их через ось несущего винта перпендикулярно направлению протяженности опорной осевой линии несущего винта. При этом смещение оси несущего винта может происходить в одном или двух измерениях. Амплитуда произвольно выбирается и может зависеть, в частности, от поступательной скорости вертолета. В приведенном выше примере левовращающегося несущего винта синусоидальный регулятор обеспечивает, чтобы расстояние находящейся с правой стороны вертолета лопасти сокращалось относительно оси вращения несущего винта, а расстояние находящейся слева лопасти от оси вращения несущего винта увеличивалось. Эта ориентация должна быть соблюдена для каждого положения несущего винта и поэтому постоянно регулируется в течение всей продолжительности полета. Преимущественно по меньшей мере два вала лопастей несущего винта соединены с его осью и смещаются вместе с ней.
Кроме того, может быть обеспечено направление валов лопастей неподвижно, однако не с возможностью вращения, в качающих подшипниках и перемещать их за счет смещения синусоидального регулятора радиально по отношению к приводной осевой линии несущего винта. При этом расстояние лопастей от приводной осевой линии несущего винта изменяется в зависимости от настройки синусоидальным регулятором.
Далее может быть обеспечено, что привод лопастей происходит через саму головку несущего винта. Приводная осевая линия несущего винта может совпадать с вертикальной осью симметрии головки несущего винта. При этом приводная сила передается от качающих подшипников через кольца несущего винта до валов лопастей. Это включает в себя предпочтительную конструктивную реализацию разделения приводной и опорной осевых линий несущего винта. Радиальные расстояния лопастей от приводной осевой линии несущего винта могут быть согласованы с поступательной скоростью вертолета. Если поступательная скорость вертолета увеличивается, то за счет большего отклонения синусоидального регулятора можно вызвать большее смещение валов лопастей, что, как уже упомянуто, вызывает компенсацию упомянутого профиля скорости в зависимости от фазы несущего винта вертолета. При этом кольца несущего винта могут быть соединены с качающими подшипниками.
Далее может быть обеспечено, что кольца несущего винта разных лопастных частей связаны между собой. За счет этого можно обеспечить единую скорость вращения отдельных частей.
Неподвижная часть вала несущего винта может быть прочно соединена, например, с головкой несущего винта. Это предназначено для передачи возникающих на оси несущего винта сил к его головке и для повышения стабильности конструкции, в целом, как статически, так и динамически.
В особенно предпочтительном варианте может быть обеспечено закрепление по меньшей мере двух валов лопастей независимо друг от друга на части оси несущего винта и за счет этого перемещать отдельные валы лопастей независимо друг от друга.
Кроме того, может быть обеспечено, что один или более валов лопастей соединен/соединены с автоматом перекоса. Это обеспечивает индивидуальную настройку угла наклона индивидуально соединенных с автоматом перекоса валов лопастей, а за счет этого - согласование сопротивления воздуха лопасти с требованиями данных летных характеристик.
В одном предпочтительном варианте дополнительная лопастная часть может быть расположена над и/или под лопастной частью. В другом предпочтительном варианте дополнительная лопастная часть может содержать вместо лопастей дополнительные грузы на валах лопастей. Масса этих дополнительных грузов может быть по времени постоянной или изменяться. Они могут содержать твердый, жидкий или газообразный материал.
Связь дополнительной лопастной части с лопастной частью может быть реализована, например, посредством ножницеобразной части с ползунами и шинами скольжения. Вид связи достигается конструкцией ножницеобразной части. При этом вид связи и конструкция дополнительных грузов согласовываются с летными характеристиками вертолета, чтобы обеспечить максимально возможную стабильность за счет компенсации возникающих дисбалансов.
В одном предпочтительном варианте дополнительные валы лопастей дополнительной лопастной части могут быть выполнены конструктивно-одинаковыми с валами лопастей лопастной части. Этот вариант обеспечивает эффективные изготовление и реализацию, т.к. дополнительные валы лопастей дополнительной лопастной части имеют, в частности, такие же длины, что и валы лопастей лопастной части. Грузы соответственно согласовываются, чтобы обеспечить компенсацию имеющихся дисбалансов и максимально возможную устойчивость вертолета в полете.
В другом предпочтительном варианте может быть обеспечено, что в дополнительной лопастной части или в имеющихся дополнительных лопастных частях длины валов лопастей отличаются от валов лопастей лопастной части. Параметры грузов согласовываются также и в этом случае, так что достигается максимально возможная устойчивость вертолета в полете. Этот вариант дополнительной лопастной части приводит к повышенной полетной мощности вследствие динамически и аэродинамически оптимизированного выполнения дополнительной лопастной части и измененной, тем самым, конструктивной формы головки несущего винта.
В другом предпочтительном варианте может быть обеспечено усовершенствование уже известной из уровня техники конструкции коаксиального несущего винта. При этом обеспечено, что дополнительная лопастная часть снабжена дополнительными лопастями. Следовательно, речь идет, например, о двух расположенных аксиально друг над другом лопастных частях с противоположными направлениями вращения. За счет этого компенсируются крутящие моменты обеих лопастных частей. Необходимый для этого связующий механизм между обеими лопастными частями может быть реализован посредством конических зубчатых колес в коаксиальной ножницеобразной части. Эта конструкция требует дополнительного автомата перекоса для настройки угла наклона дополнительных валов лопастей дополнительной лопастной части, которые оснащены не грузами, а лопастями. Вариант этой конструкции предусматривает отделение приводной осевой линии от опорной осевой линии коаксиального несущего винта. Смещение опорной осевой линии происходит за счет дополнительного синусоидального регулятора, который размещен предпочтительно в коаксиальной ножницеобразной части.
Преимущественно направление вращения лопастной части связано с направлением вращения по меньшей мере одной дополнительной лопастной части, в частности через конические зубчатые колеса в кольце с пазом, размещенном в коаксиальной ножницеобразной части. Таким образом, возможны синхронные или противоположные вращательные движения.
В частности, в одном особенно предпочтительном варианте смещение дополнительного несущего винта происходит через ходовой винт и ползуны, перемещающиеся равномерно по отношению друг к другу. Это может осуществляться как электрически, так и гидравлически через соединения, проходящие по главной осевой линии. Преимущественно имеется по меньшей мере один дополнительный автомат перекоса, который управляет по меньшей мере одной дополнительной лопастной частью. Далее, по меньшей мере один из автоматов перекоса может быть установлен в головке несущего винта, особенно предпочтительно в крышке несущего винта. За счет этого возникают преимущества благодаря короткой механической связи с валами лопастей посредством тяг и рычагов. По меньшей мере один из автоматов перекоса может быть соединен с по меньшей мере одним из дополнительных автоматов перекоса, например тягами и рычагами, чтобы обеспечить синхронное изменение угла наклона валов лопастей и дополнительных валов лопастей.
Преимущественно на фюзеляже вертолета могут быть расположены крылья и/или вертикальное оперение. Часть крыльев может быть выполнена в виде горизонтального оперения, причем крайне предпочтительно, если горизонтальное оперение в направлении полета размещено перед крыльями на фюзеляже вертолета. За счет этого даже при возрастании поступательной скорости вертолета обеспечиваются стабильные полетное положение и маневренность. К тому же улучшаются приводные характеристики.
Крайне предпочтительно крылья могут быть установлены на вертолете с возможностью поворота, причем с возможностью поворота под углом по меньшей мере 90°. Таким образом, возможна чисто аэродинамическая компенсация крутящего момента главного несущего винта. Другими преимуществами являются уменьшение шума несущего винта и возможность движения вперед и/или вращательного движения вокруг собственной оси при полете в режиме висения.
В фюзеляже вертолета в качестве первичного привода может быть обеспечен генератор, содержащий преимущественно турбины, поршневые двигатели, топливные ячейки и/или аккумуляторы. Этим можно достичь еще более высоких поступательных скоростей и обеспечить также реверс тяги, так что вертолет может быть быстро заторможен.
Преимущественно в регулируемой каретке в фюзеляже вертолета подвижно установлено опорное кольцо, причем опорное кольцо соединено с головкой несущего винта с возможностью смещения вместе с ней в направлении продольной оси фюзеляжа вертолета. При возрастании поступательной скорости центр тяжести подъема смещается всегда дальше назад против направления полета, в результате чего центр тяжести вертолета смещается вперед. За счет смещения головки несущего винта вперед в направлении носовой части вертолета центр тяжести подъема может снова сместиться близко к центру тяжести вертолета. Фюзеляж вертолета остается, тем самым, аэродинамическим и с минимально возможной лобовой поверхностью в воздушном течении. Этим достигаются более высокая максимальная поступательная скорость, оптимальное полетное положение и более быстрое боковое движение.
Другие преимущества и особенности изобретения приведены в формуле изобретение и в последующем описании, в котором подробно поясняются примеры его осуществления со ссылками на чертежи.
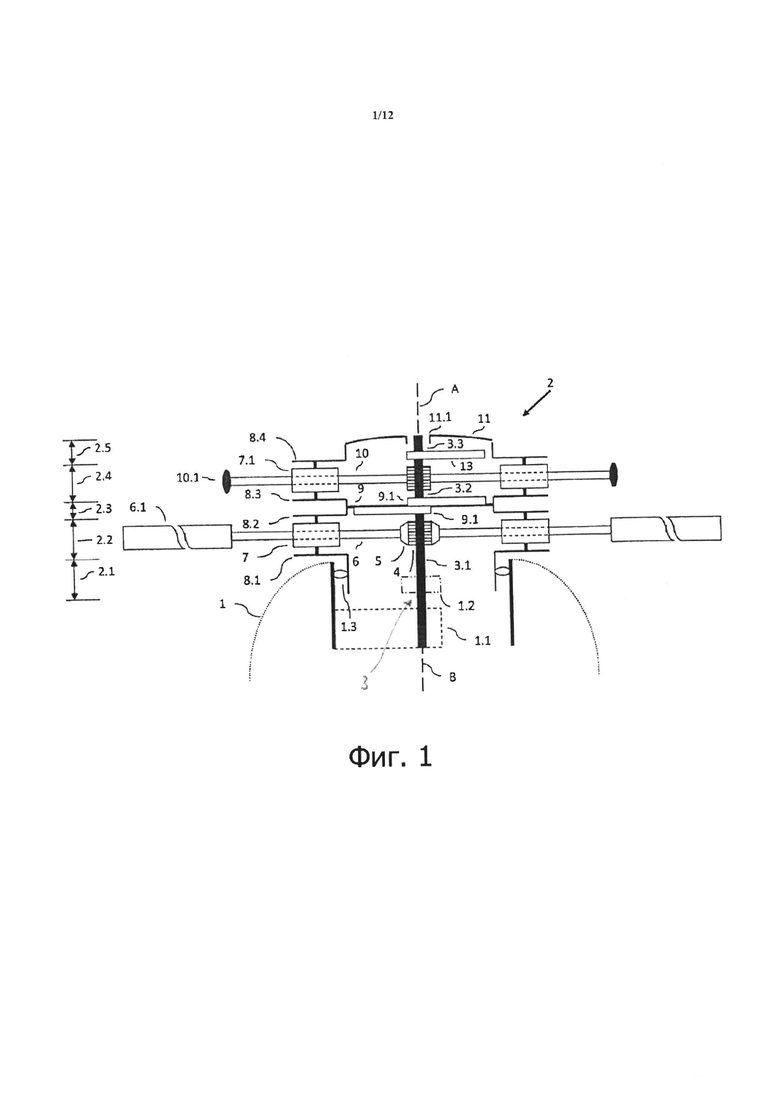
На фиг. 1 показан вертолет согласно предпочтительному варианту осуществления изобретения в неотклоненном состоянии в вертикальном разрезе при виде сзади или в направлении полета;
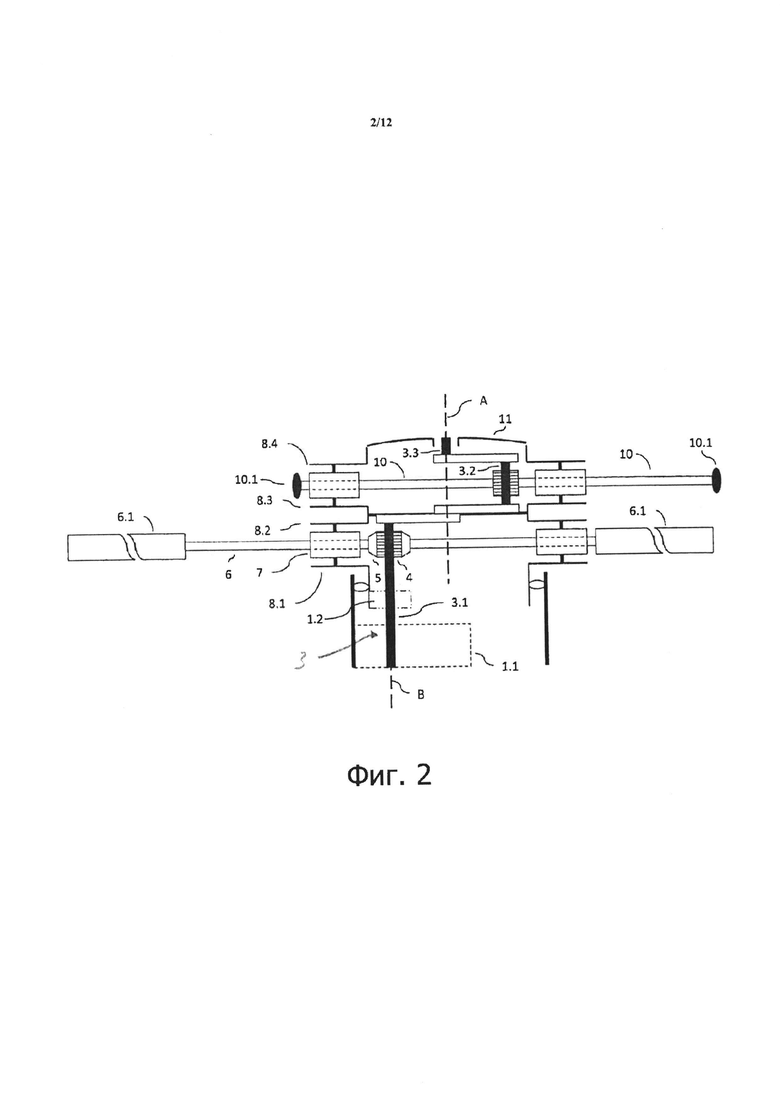
на фиг. 2 схематично в разрезе показан вариант на фиг. 1 с отклоненной головкой несущего винта с соответственно отклоненными синусоидальным регулятором и валами лопастей;
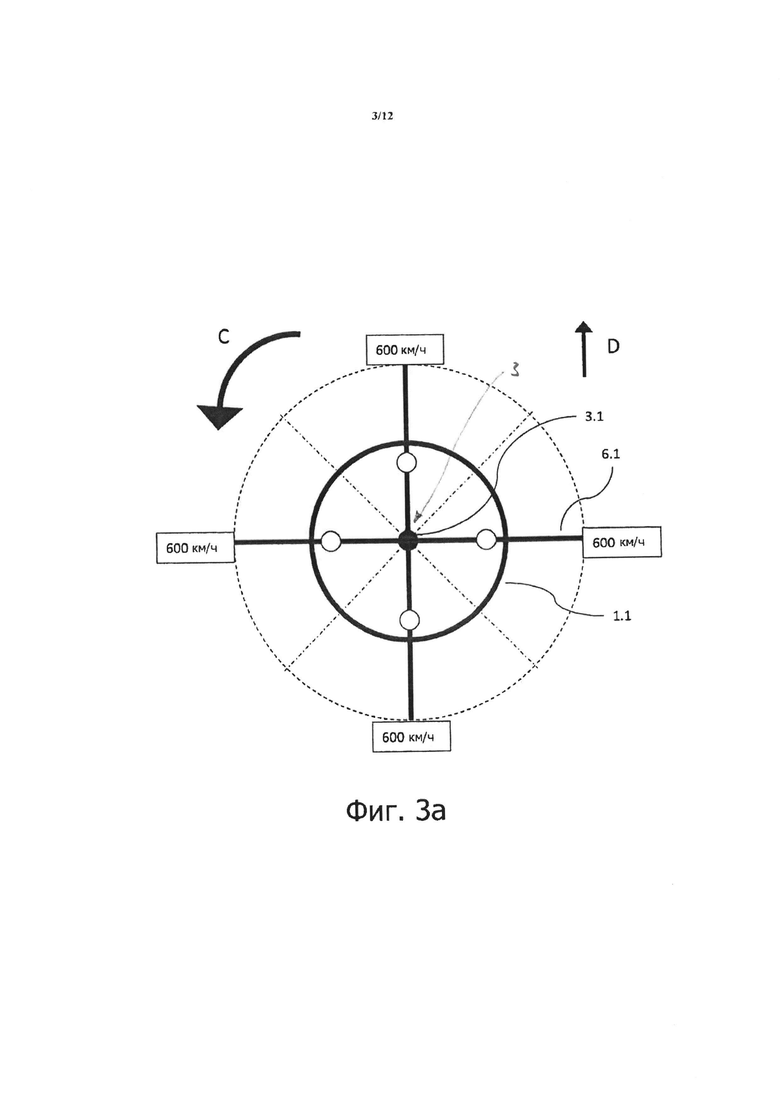
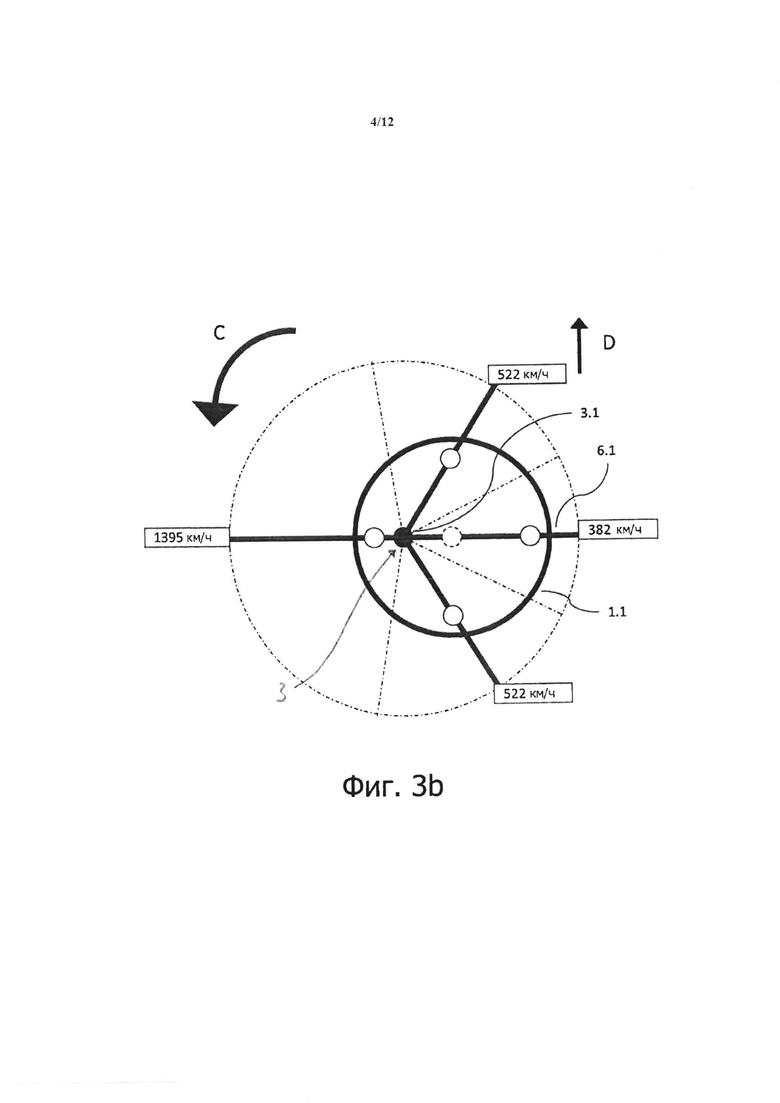
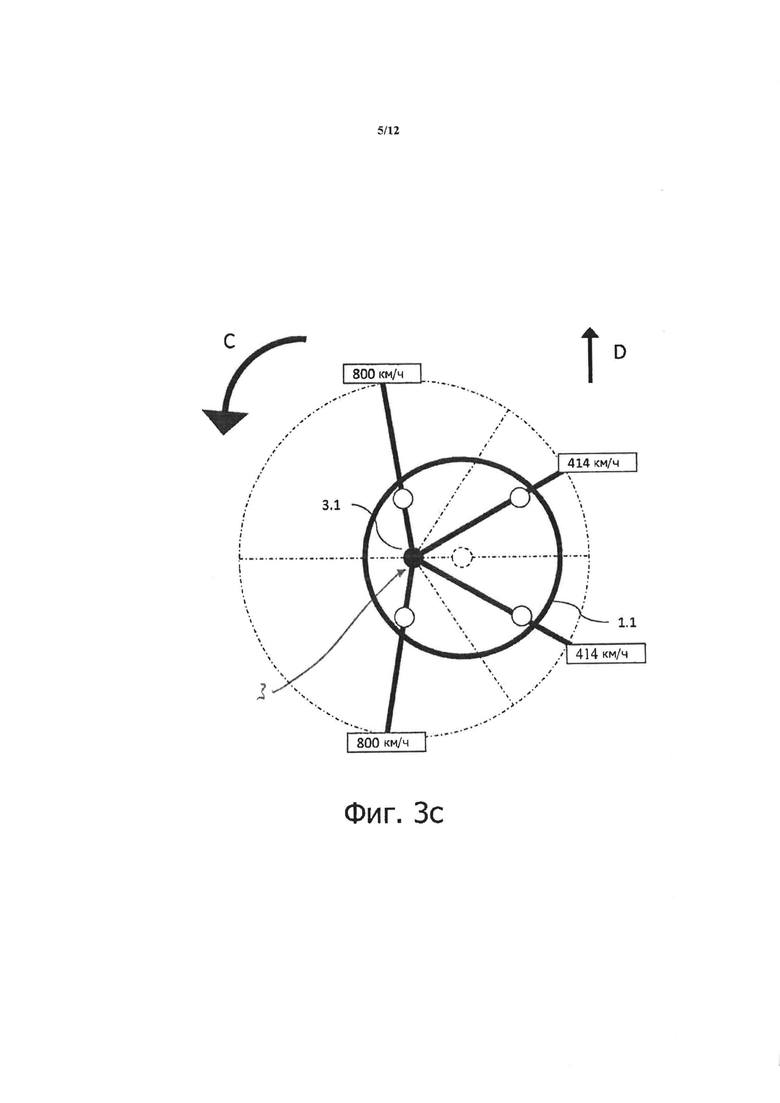
на фиг. 3а-3с - несущий винт вертолета согласно изобретению в неотклоненном состоянии головки несущего винта (фиг. 3а) и в отклоненном состоянии головки несущего винта (фиг. 3b, 3с) с разными положениями лопастей, виды сверху;
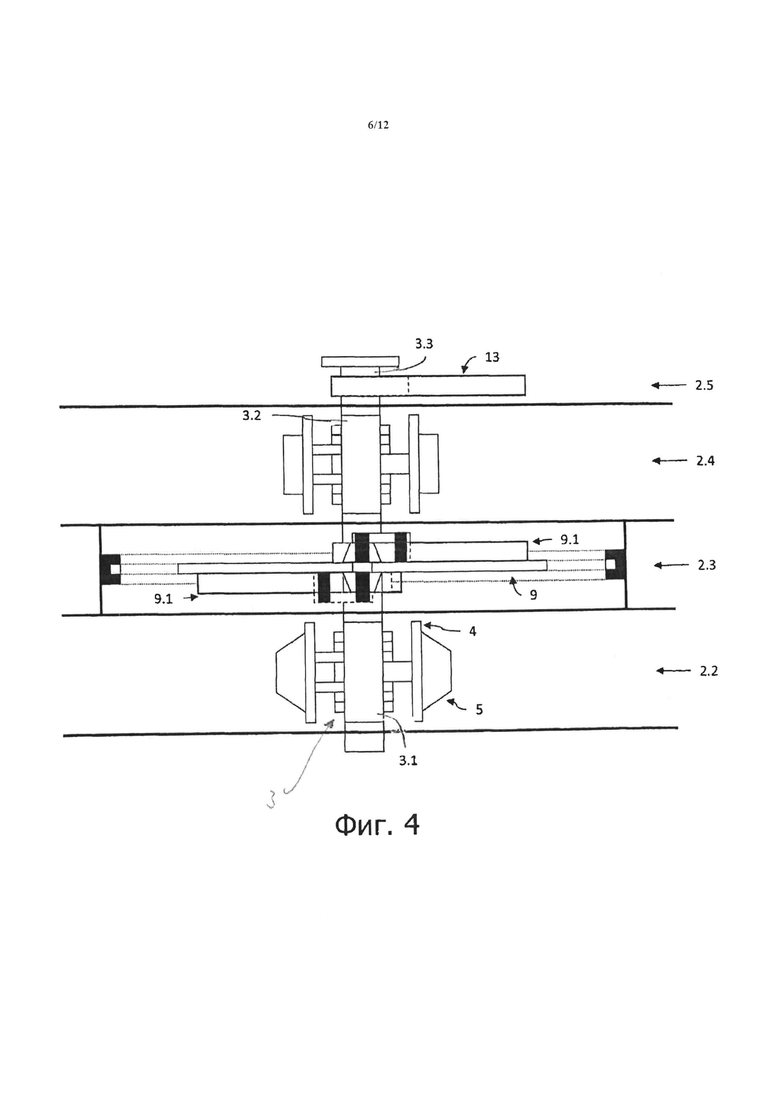
на фиг. 4 - средняя ножницеобразная часть между лопастной и дополнительной лопастными частями в неотклоненном положении, вид в разрезе;
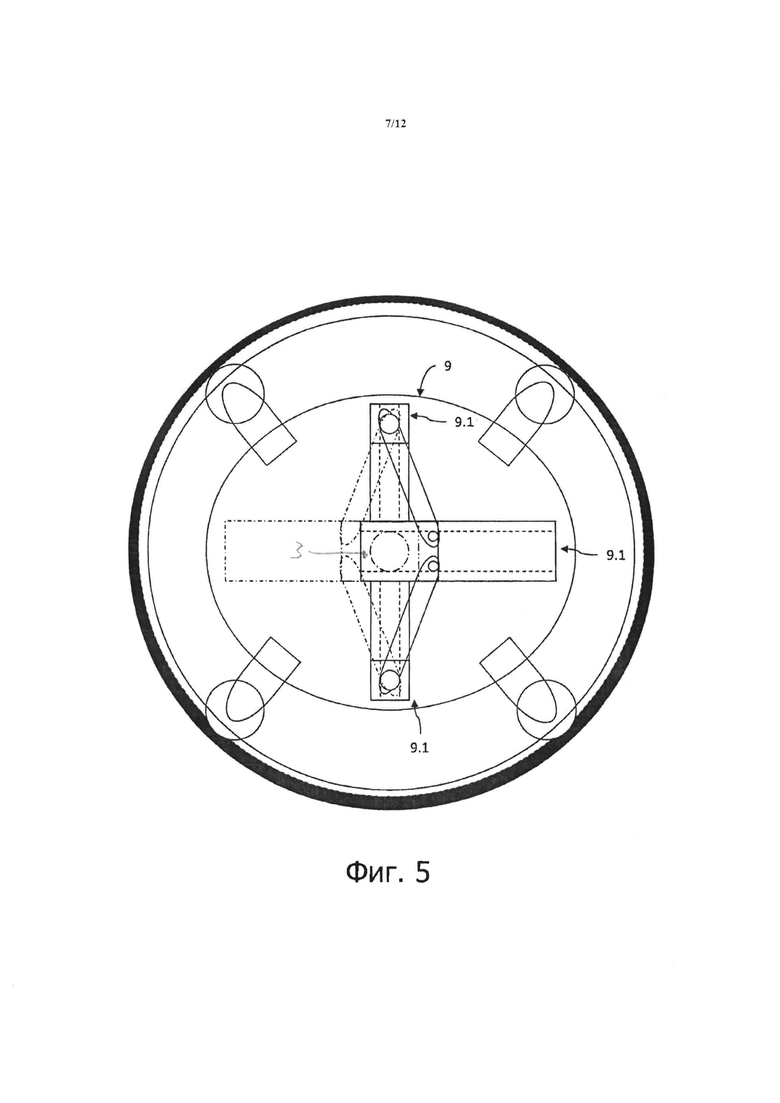
на фиг. 5 - неотклоненная ножницеобразная часть согласно предпочтительному варианту осуществления, вид сверху;
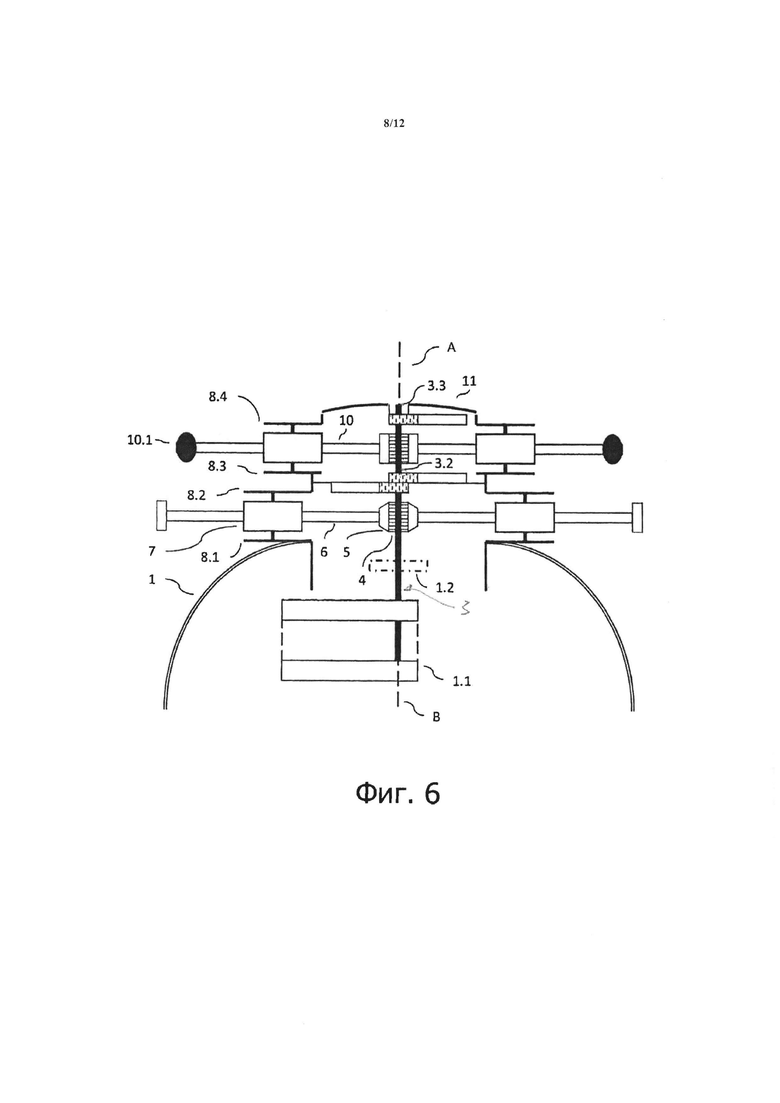
на фиг. 6 - неотклоненная головка несущего винта согласно другому предпочтительному варианту осуществления изобретения, причем дополнительные валы лопастей дополнительной лопастной части укорочены по сравнению с валами лопастей лопастной части и снабжены дополнительными грузами, вид в продольном разрезе;
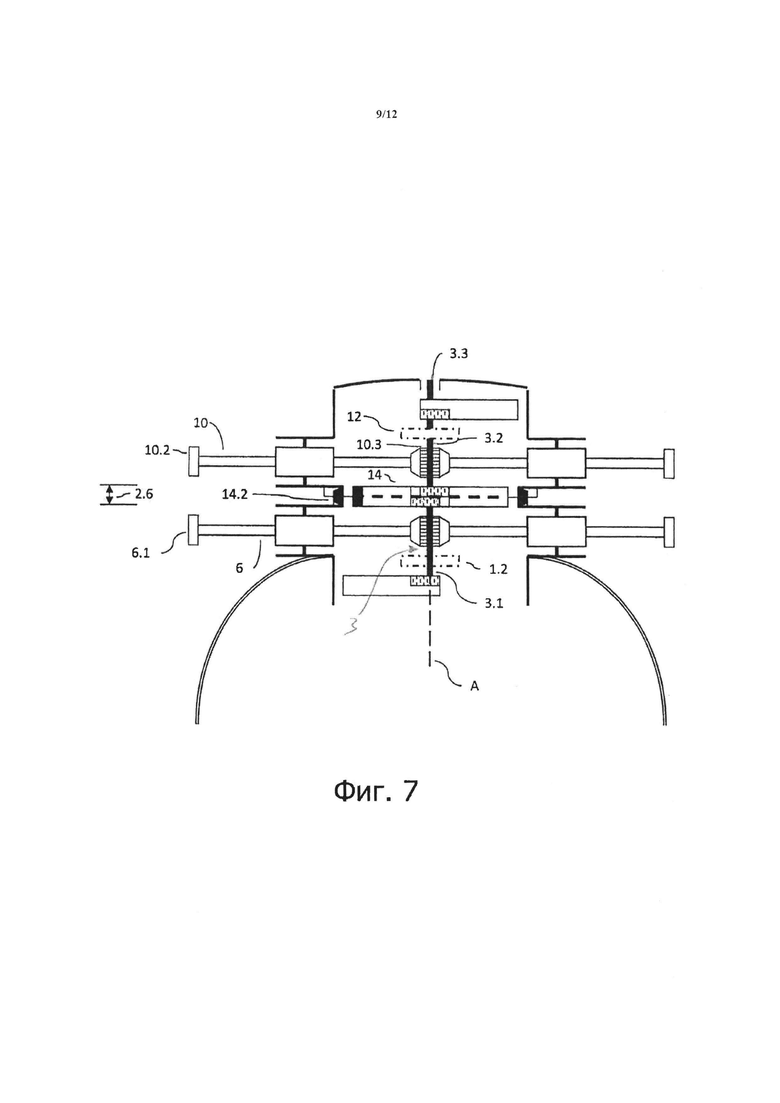
на фиг. 7 - головка несущего винта согласно другому предпочтительному варианту осуществления изобретения, причем дополнительная лопастная часть выполнена в виде коаксиального несущего винта, вид в продольном разрезе;
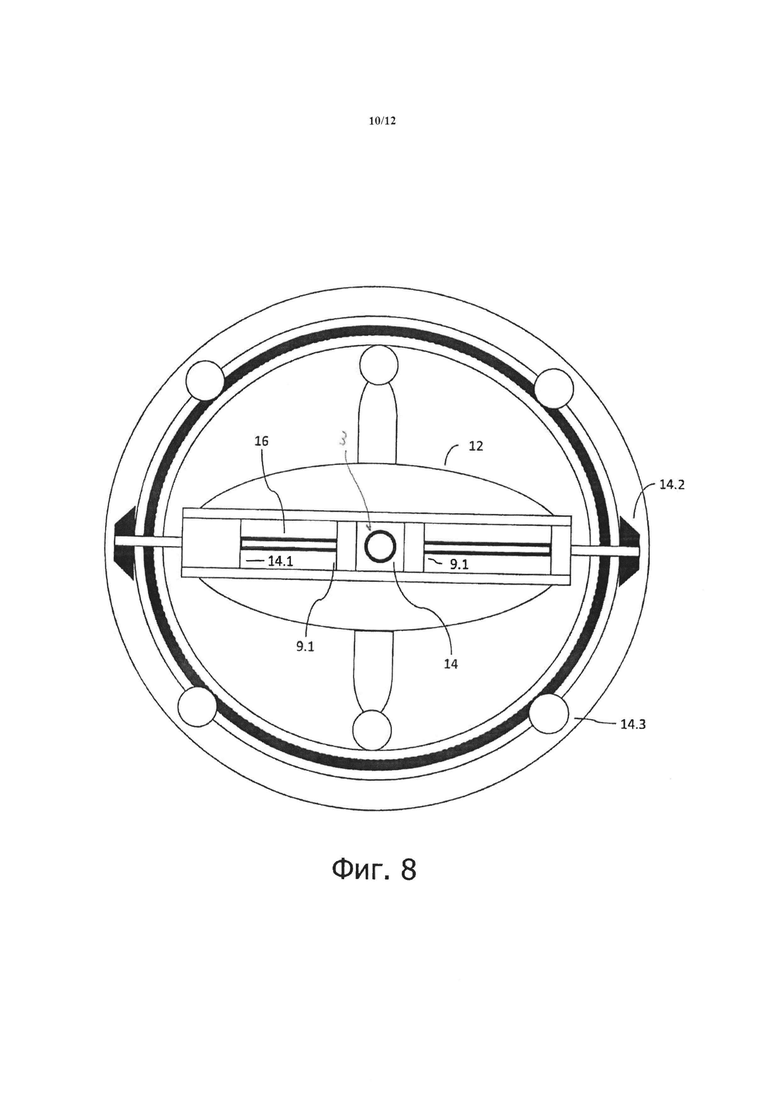
на фиг. 8 - коаксиальная ножницеобразная часть согласно предпочтительному варианту осуществления с коаксиальным несущим винтом, вид сверху;
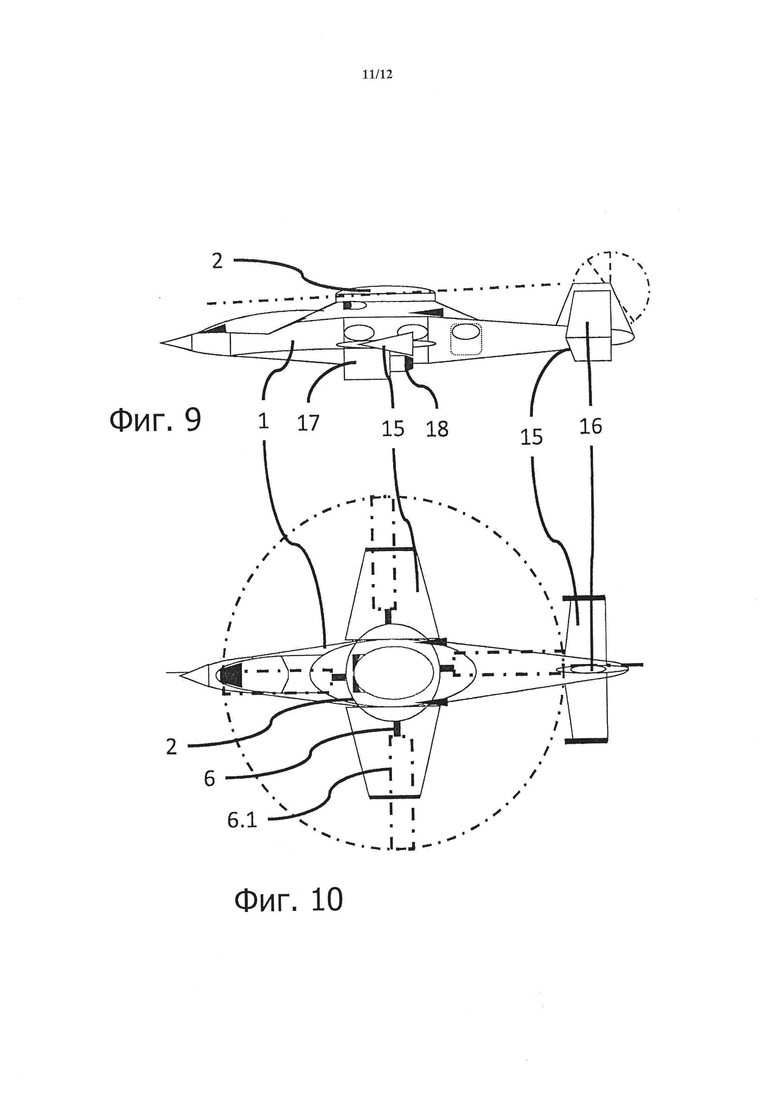
на фиг. 9 - вертолет согласно другому варианту осуществления с крыльями и первичным приводом, вид сбоку;
на фиг. 10 - вертолет на фиг. 9, вид сверху;
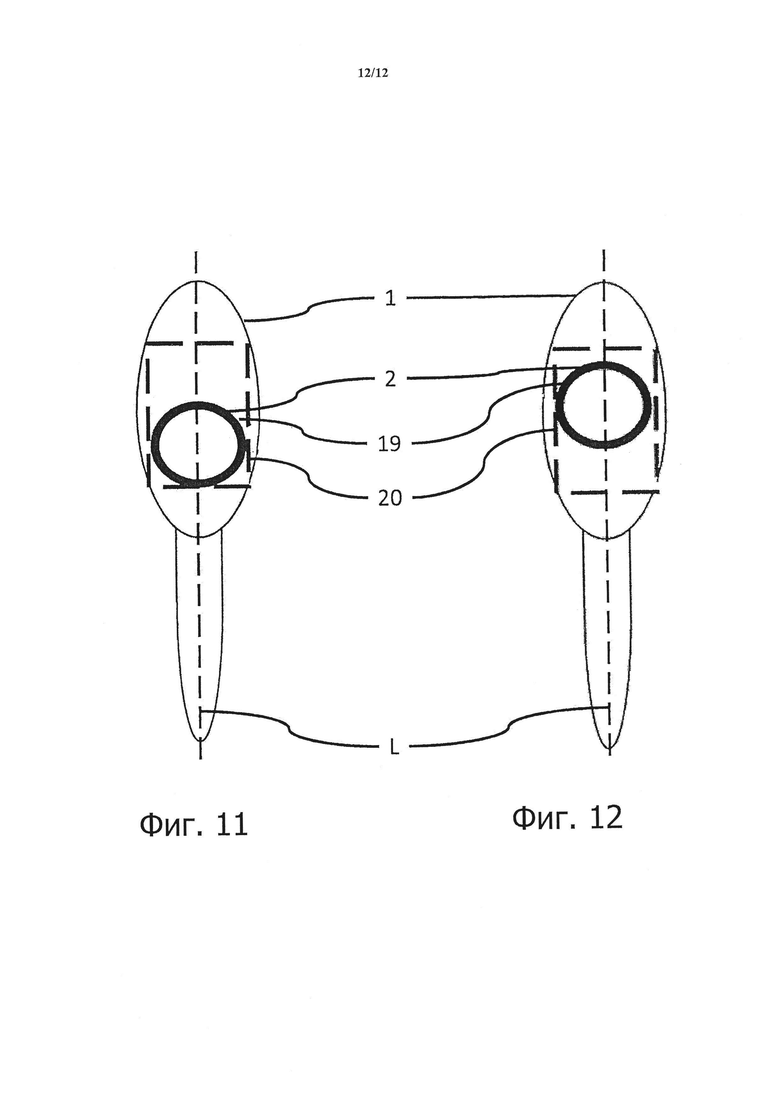
на фиг. 11 схематично показан вертолет согласно другому варианту осуществления изобретения с регулируемой кареткой и опорным кольцом, вид сверху;
на фиг. 12 - вертолет на фиг. 11 со смещенным опорным кольцом.
На фиг. 1 показан вертолет согласно предпочтительному варианту осуществления изобретения. Он содержит фюзеляж 1 с продольной осью L (не показана), проходящей перпендикулярно плоскости чертежа, и головку 2 несущего винта. Головка 2 выполнена в виде кожуха и содержит ось 3, которая сама, согласно изобретению, не приводится во вращение и здесь состоит из трех частей, аксиально-следующих друг за другом: опорная ось 3.1, дополнительная опорная ось 3.2 и направляющая ось 3.3. С опорной осью 3.1 через ее подшипник 4 соединены перпендикулярные опорной оси 3.1 валы 6 лопастей, выполненные также с возможностью поворота в радиальной плоскости по отношению к опорной оси 3.1. На внешнем конце каждого вала 6 лопасти находится собственно лопасть 6.1.
Сама не приводимая во вращение опорная ось 3.1 несущего винта установлена в расположенном в фюзеляже 1 синусоидальном регуляторе 1.1 и смещается за счет него перпендикулярно направлению своей протяженности и перпендикулярно направлению полета вертолета (фиг. 2).
Выполненная в виде кожуха головка 2 несущего винта приводится во вращение посредством выступающего вверх из фюзеляжа 1 приводного вала 1.3 в форме цилиндрической оболочки. Более подробно привод не показан и может быть выполнен через обычный редуктор от приводного двигателя. Приводной вал 1.3 охватывает опорную ось 3.1 несущего винта на большом радиальном расстоянии, благодаря чему имеется достаточное боковое свободное пространство для бокового смещения опорной оси 3.1 несущего винта относительно осевой линии А приводного вала 1.3.
Приводной вал 1.3 приводит выполненную в виде кожуха головку 2 несущего винта. Для этого он через нижние кольца 8.1 несущего винта соединен с качающими подшипниками 7 валов 6 лопастей. За счет этого валы 6 лопастей и, тем самым, лопасти 6.1 приводятся во вращение, однако установлены в качающих подшипниках 7 с возможностью смещения радиально относительно опорной оси 3.1 несущего винта и вдоль своей собственной протяженности.
Согласно вышеприведенному описанию, конструкция головки 2 несущего винта может быть разделена на приводную часть 1.3, 7, 8.1 и опорную часть 3.1, 4, 6.
Другие части головки несущего винта касаются компенсации дисбаланса и описаны далее.
За счет смещаемой вбок конструкции опорной оси 3.1 несущего винта с отделением опорной оси 3.1 и, тем самым, также оси 3 несущего винта самой по себе и приводного вала 1.3 лопастей 6.1, последние могут быть смещены из нормального или начального положения, показанного на фиг. 1, в полетное положение, показанное на фиг. 2, в частности для высоких поступательных скоростей вертолета. При этом на фиг. 2 в разрезе показано положение смещенных лопастей левовращающегося несущего винта при виде сзади.
Возникшие за счет этого условия показаны на фиг. 3а-3с при виде сверху. При этом указаны направление С вращения лопастей и направление D полета вертолета. На фиг. 3а показано нейтральное или начальное положение опорной оси 3.1 несущего винта и приводного вала 1.3. При передаваемой приводным валом 1.3 на лопасти 6.1 заданной угловой скорости на внешних концах лопастей 6.1 возникает одинаковая скорость вращения, здесь, например, 600 км/ч. С высокой летной или поступательной скоростью вертолета при левовращающемся несущем винте его опорная ось 3.1 на фиг. 3b, 3с или при рассмотрении в направлении D полета (фиг. 2) движется относительно приводного вала 1.3 влево. В результате этого в положении вращения несущего винта, в котором две лопасти 6.1 проходят на одной оси перпендикулярно направлению D полета, левая в направлении D полета лопасть (фиг. 2, 3b) при такой же угловой скорости, что и на фиг. 3а, имеет на своем внешнем конце вследствие большего расстояния от приводной осевой линии А несущего винта существенно большую скорость вращения (относительно фюзеляжа 1 вертолета), здесь 1395 км/ч, тогда как правая лопасть имеет существенно меньшую скорость вращения, здесь 382 км/ч. Без учета других влияний на левой лопасти уже происходит срыв потока, т.к. конец лопасти движется со сверхзвуковой скоростью.
При поступательной скорости вертолета 300 км/ч оба внешних конца лопастей имеют, таким образом, несмотря на более высокую скорость вертолета, скорости вращения, при которых еще не происходит срыва потока. Возникающие скорости левой и правой лопастей над землей составляют в данном примере 1095 км/ч и 682 км/ч. При этом теоретически левая и правая лопасти движутся над землей одинаково быстро, если вертолет движется в направлении D полета с поступательной скоростью 888 км/ч.
Поскольку осевая линия В опорной оси 3.1 несущего винта и осевая линия А приводного вала 1.3 расходятся, при той же угловой скорости приводной осевой линии А угловая скорость лопастей 6.1 изменяется вокруг оси А вращения синусоидально - левая на фиг. 3b лопасть покрывает за то же время больший угол, чем правая. Поэтому лопасти 6.1 (со своими валами 6) не должны быть соединены с опорной осью 3.1 несущего винта без возможности вращения и не соединены так. Их относительное угловое положение изменяется при вращении, как это показывает сравнение фиг. 3b, 3с. Покрытые за то же время отдельными лопастями угловые участки обозначены на фиг. 3b, 3c штрихпунктирной линией.
На фиг. 1 головка 2 несущего винта имеет, в основном, пять частей (снизу вверх): опорную часть 2.1, лопастную часть 2.2, среднюю ножницеобразную часть 2.3, дополнительную лопастную часть 2.4 и закрывающую часть 2.5 несущего винта. В лопастной части 2.2 приводной вал 1.3 соединен с нижними кольцами 8.1 несущего винта, которые, в свою очередь, соединены с возможностью вращения с качающими подшипниками 7. В них установлены валы 6 лопастей. Верхние кольца 8.2 лопастной части 2.2, в свою очередь, через промежуточную пластину 9 средней ножницеобразной части 2.3 соединены с нижними дополнительными кольцами 8.3 дополнительной лопастной части 2.4. Аналогично лопастной части 2.2 нижние дополнительные кольца 8.3 через дополнительные качающие подшипники 7.1 дополнительной лопастной части 2.4 соединены с верхними дополнительными кольцами 8.4, которые образуют с крышкой 11 несущего винта его закрывающую часть 2.5.
В опорной части головки 2 несущего винта синусоидальный регулятор 1.1 содержит снабженное приводом устройство регулировки (ходовой винт, опорную каретку с шиной скольжения) для установки и смещения оси 3 несущего винта. Амплитуда его смещения синусоидальным регулятором 1.1 может зависеть, в частности, от поступательной скорости вертолета и служит для соответствующего движения лопастей 6.1.
Ось 3 несущего винта разделена здесь, как уже сказано, на три части: опорную ось 3.1, дополнительную опорную ось 3.2 и направляющую ось 3.3. Подшипники 4 соединены с опорной осью 3.1 и валами 6 лопастей. Автомат перекоса 1.2 закреплен как на синусоидальном регуляторе 1.1, так и тягами и рычагами - на вращающихся подшипниковых узлах 5, соединенных, в свою очередь, с валами 6 лопастей. Валы 6 лопастей установлены, в свою очередь, в качающих подшипниках 7 и направляются ими.
Опорная ось 3.1 несущего винта в средней ножницеобразной части 2.3 соединена ползунами 9.1 с промежуточной пластиной 9, как это следует также из фиг. 1 и 4. Ползуны 9.1 соединяют промежуточную пластину 9 с дополнительной опорной осью 3.2 несущего винта в дополнительной лопастной части 2.4. Ее конструкция аналогична лопастной части 2.2 за исключением вращающихся подшипниковых узлов 5. На дополнительных валах 10 дополнительной лопастной части 2.4 для компенсации дисбаланса размещены противовесы 10.1 вместо лопастей 6.1 в лопастной части 2.2. На дополнительной опорной оси 3.2 несущего винта размещен направляющий ползун 13, который связывает дополнительную опорную ось 3.2 несущего винта с его направляющей осью 3.3. Указанная направляющая ось через подшипник 11.1 крышки несущего винта жестко соединена с его крышкой 11. Сама крышка 11 замыкает закрывающую часть 2.5 с верхними дополнительными кольцами 8.4 приводной части и подшипником 11.1 крышки.
Приводная сила передается через кожух 2 несущего винта. Этим гарантировано, что приводная осевая линия А несущего винта независима от движений отклонения его опорной осевой линии В, причем последняя с одним компонентом может смещаться перпендикулярно продольной оси L фюзеляжа 1 вертолета и не ограничена показанным на фиг. 2 направлением, а может смещаться, в частности, в обе стороны от продольной оси L. Опорная часть 2.1 кожуха 2 несущего винта несет фюзеляж 1 в полете и передает приводные силы от главного привода фюзеляжа 1 в головку 2 несущего винта. Содержащиеся в кольцах 8.1, 8.2 лопастной части 2.2 качающие подшипники 7 направляют приводные силы из кожуха 2 несущего винта через кольца 8.1, 8.2 к валам 6 лопастей. Соединенные с ними качающие подшипники 7 обеспечивают направляемые опорной осью 3.1 несущего винта продольные смещения валов 6 лопастей и, тем самым, самих лопастей 6.1. Качающие подшипники 7 воспринимают, кроме того, ускоряющие и тормозящие силы на валах 6 и лопастях 6.1 и направляют их дальше к кольцам 8.1, 8.2. За счет соединения верхнего кольца 8.2 лопастной части 2.2 через промежуточную пластину 12 с нижним дополнительным кольцом 8.3 дополнительной лопастной части 2.4 синхронизированы вращательные движения двух лежащих друг над другом валов 6 лопастей.
Синусоидальный регулятор 1.1 вызывает смещение опорной оси 3.1 несущего винта за счет перемещения опорных кареток по шинам скольжения, к которым прикреплена опорная ось 3.1, следуя, тем самым, этому движению. В результате этого за счет смещения валов 6 лопастей вдоль своей ориентации изменяются расстояния лопастей 6.1 от приводной осевой линии А несущего винта. Точно так же синусоидальный регулятор 1.1 соединен с автоматом 1.2 перекоса через сервомоторы или гидравлические сервоприводы для настройки угла установки валов 6 лопастей посредством вращающихся подшипниковых узлов 5.
В средней ножницеобразной части 2.3 (см. фиг. 4 и 5) конструкция промежуточной пластины 9 предназначена для передачи движения опорной оси 3.1 несущего винта с закрепленной на ней лопастной частью 2.2 на дополнительную опорную ось 3.2 и дополнительные валы 10 лопастей в дополнительной лопастной части 2.4. Противовесы 10.1 на концах дополнительных валов 10 лопастей компенсируют при этом возникающий дисбаланс за счет смещенной противоположной лопасти 6.1 в лопастной части 2.2. Из-за отсутствия лопастей в дополнительной лопастной части 2.4 отпадают настройка угла наклона и, тем самым, также вращающиеся подшипниковые узлы. Подшипник 11.1 крышки несущего винта образует жесткое соединение с его направляющей осью 3.3.
На фиг. 6 показана другая предпочтительная конструкция согласно изобретению с укорочением дополнительных валов 10 лопастей в дополнительной лопастной части 2.4 по сравнению с валами 6 лопастей лопастной части 2.2. За счет этого соответственно изменяются параметры противовесов 10.1. Изменение включает в себя, в частности, их массу. Изменение, в частности, массы противовесов 10.1 ограничено, в том числе, максимально допустимым весом вертолета. При этом можно достичь более компактной конструкции головки 2 несущего винта за счет соответствующего выполнения дополнительной лопастной части 2.4 по сравнению с нижней лопастной частью 2.2 и благодаря этому улучшения летных характеристик.
На фиг. 7 показан предпочтительный вариант в качестве усовершенствования уже известной из уровня техники конструкции коаксиальных несущих винтов. При этом дополнительная лопастная часть 2.4 размещена коаксиально над лопастной частью 2.2 и снабжена вместо противовесов 10.1 дополнительными лопастями 10.2. Они вращаются навстречу лопастям 6.1. За счет этого крутящие моменты обеих лопастных частей компенсируются. Эта конструкция требует дополнительного автомата 12 перекоса для настройки угла наклона дополнительных лопастей 10.2 дополнительной лопастной части 2.4 посредством дополнительных вращающихся подшипниковых узлов 10.3. В предпочтительном варианте на фиг. 7 обеспечено, что даже в случае системы коаксиального несущего винта его опорная осевая линия В отделяется от приводной осевой линии А.
Коаксиальный синусоидальный регулятор 14 размещен в коаксиальной ножницеобразной части 2.6 (фиг. 8). Он содержит ходовой винт 14.1, который электрически или гидравлически двигает ползуны 9.1 коаксиальной ножничной секции 2.6. Закрепленная на ползунах 9.1 опорная ось 3.1 несущего винта и его дополнительная опорная ось 3.2 движутся противоположно по отношению друг к другу. Валы 6 лопастей лопастной части 2.2 и дополнительные валы 10 лопастей дополнительной лопастной части 2.4 движутся за счет этого противоположно по отношению друг к другу.
В этом предпочтительном варианте имеются автомат 1.2 перекоса и дополнительный автомат 12 перекоса. В то время как автомат 1.2 перекоса размещен в соответствии с прежними вариантами, дополнительный автомат 12 перекоса установлен в дополнительной лопастной части 2.4 с поворотом на 180°. Далее в дополнительной лопастной части 2.4 имеются дополнительные вращающиеся подшипниковые узлы 10.3, настраивающие угол наклона дополнительных лопастей 10.2. Они выполнены правовращающимися и размещены на дополнительных валах 10 дополнительной лопастной части 2.4. Лопастная часть 2.2 приводит во вращение дополнительную лопастную часть 2.4 через конические зубчатые колеса 14.2 в коаксиальной ножницеобразной части 2.6 во встречном направлении. При этом дополнительная лопастная часть 2.4 посредством роликовой опоры движется по кольцу 14.3 с пазом в или на лопастной части 2.2 (фиг. 8).
На фиг. 9 и 10 показан вертолет согласно другому варианту изобретения, с обеих сторон фюзеляжа 1 которого горизонтально размещены крылья 15. Они размещены на средней высоте фюзеляжа 1 с возможностью поворота. За счет своей возможности поворота вокруг горизонтальной оси, по меньшей мере, на 90° и своих аэродинамических свойств крылья создают дополнительную подъемную силу. Другая пара крыльев 15 расположена в хвостовой части фюзеляжа 1, причем горизонтальный размер задних крыльев 15 меньше, чем передних крыльев 15. В частности, передние крылья 15 могут быть выполнены в виде горизонтального оперения, так что они расположены перед задними крыльями 15 в виде так называемых канардов. В хвостовой части фюзеляжа 1 расположено вертикальное оперение 16 в виде проходящего, в основном, вертикально вверх заднего стабилизатора.
На средней высоте фюзеляжа 1 под крыльями 15 обеспечен генератор 17 с первичным приводом 18. Генератор 17 может содержать, например, топливные ячейки и/или аккумуляторы и вырабатывает энергию для первичного привода 18, который сам содержит турбины и создает дополнительную приводную силу для вертолета. В отношении остальных компонентов дана ссылка на предыдущее описание.
В варианте вертолета на фиг. 11 и 12 в фюзеляже 1 обеспечено подвижное в регулируемой каретке 20 опорное кольцо 19, направление движения которого ориентировано вдоль продольной оси L фюзеляжа 1. Головка 2 несущего винта соединена с опорным кольцом 19 и, тем самым, может смещаться также в направлении продольной оси L фюзеляжа 1, так что при высоких поступательных скоростях, когда точка подъемной силы вертолета смещается назад в направлении хвостовой части, а центр тяжести нагрузки, следовательно, - вперед в направлении носовой части, центр тяжести подъемной силы за счет смещения головки несущего винта снова смещается вперед по опорному кольцу 19 к центру тяжести (массы) вертолета. Благодаря этому возможны устойчивые полетные положения даже при очень высоких поступательных скоростях.
Список ссылочных обозначений
1 - фюзеляж вертолета
1.1 - синусоидальный регулятор
1.2 - автомат перекоса
1.3 - приводной вал
2 - головка несущего винта
2.1 - опорная часть
2.2 - лопастная часть
2.3 - ножницеобразная часть
2.4 - дополнительная лопастная часть
2.5 - закрывающая часть несущего винта
2.6 - коаксиальная ножницеобразная часть
3 - ось несущего винта
3.1 - опорная ось несущего винта
3.2 - дополнительная опорная ось несущего винта
3.3 - направляющая ось несущего винта
4 - подшипник вала лопасти
5 - вращающиеся подшипниковые узлы
6 - вал лопасти 6.1 - лопасть
6 - вал лопасти
7 - качающий подшипник
7.1 - дополнительный качающий подшипник
8.1 - нижнее кольцо несущего винта
8.2 - верхнее кольцо несущего винта
8.3 - нижнее дополнительное кольцо несущего винта
8.4 - верхнее дополнительное кольцо несущего винта
9 - промежуточная пластина
9.1 - ползун
10 - дополнительный вал лопасти
10.1 - противовес
10.2 - дополнительные лопасти
10.3 - дополнительные вращающиеся подшипниковые узлы
11 - крышка несущего винта
11.1 - подшипник крышки несущего винта
12 - дополнительный автомат перекоса
13 - направляющий ползун
14 - коаксиальный синусоидальный регулятор
14.1 - ходовой винт
14.2 - конические зубчатые колеса
14.3 - кольцо с пазом
15 - крыло
16 - вертикальное оперение
17 - генератор
18 - первичный привод
19 - опорное кольцо
20 - регулируемая каретка
А - приводная осевая линия несущего винта
В - опорная осевая линия несущего винта
С - направление вращения несущего винта
D - направление полета
L - продольная ось
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРОИДАЛЬНЫЙ ФЮЗЕЛЯЖ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2108267C1 |
| ПРИВОДНОЙ КИНЕМАТИЧЕСКИЙ УЗЕЛ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2114766C1 |
| Привод, в частности, для несущего винта летательного аппарата с несущим винтом | 2020 |
|
RU2802265C2 |
| ОБЪЕДИНЕННЫЙ ОПОРНЫЙ ПОДУЗЕЛ УЗЛА НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2113378C1 |
| СООСНЫЙ ПОДУЗЕЛ ТРАНСМИССИЯ/ЦЕНТРАЛЬНАЯ ВТУЛКА УЗЛА НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2108269C1 |
| ЛОПАСТНОЙ ПОДУЗЕЛ НЕСУЩЕГО ВИНТА БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2125952C1 |
| ДЕМПФИРУЮЩИЙ УЗЕЛ НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2117604C1 |
| ВИНТ, НАПРИМЕР НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА | 2020 |
|
RU2740717C1 |
| ХВОСТОВОЕ ОПЕРЕНИЕ ВЕРТОЛЕТА | 2013 |
|
RU2575969C2 |
| Автомат перекоса многороторного летательного аппарата с жестким креплением лопастей и способ его работы | 2020 |
|
RU2749709C1 |
Изобретение относится к области авиации, в частности к конструкциям несущих систем вертолетов. Вертолет включает в себя фюзеляж (1) с продольной осью (L) и приводимую во вращение вокруг приводной осевой линии (А) несущего винта головку (2) несущего винта, содержащую по меньшей мере две лопасти (6.1), удерживаемые соответствующим валом (6) лопасти несущего винта. Опорная осевая линия (В) валов (6) лопастей несущего винта выполнена с возможностью смещения перпендикулярно направлению своей протяженности относительно приводной осевой линии (А) несущего винта. Ось (3) несущего винта содержит множество частей, указанные части оси (3) несущего винта включают в себя по меньшей мере одну опорную ось (3.1) и дополнительную опорную ось (3.2). Головка (2) несущего винта в по меньшей мере одной лопастной части (2.2) удерживает по меньшей мере два вала (6) лопастей. Подвижные части оси (3), опорная ось (3.1) и дополнительная опорная ось (3.2) несущего винта выполнены с возможностью отклонения противоположно, за счет чего валы (6) лопастей и дополнительные валы (10) лопастей подвижны в противоположных направлениях по отношению друг к другу. Обеспечивается достижение более высокой скорости полета. 40 з.п. ф-лы, 12 ил.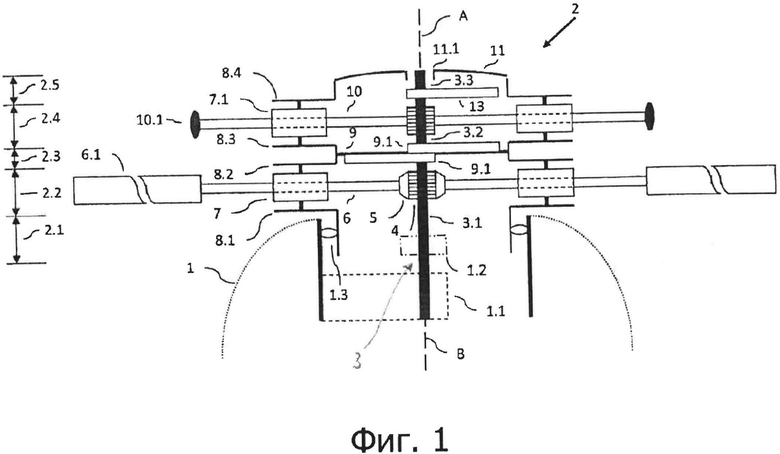
1. Вертолет, включающий в себя фюзеляж (1) с продольной осью (L) и приводимую во вращение вокруг приводной осевой линии (А) несущего винта головку (2) несущего винта, содержащую по меньшей мере две лопасти (6.1), удерживаемые соответствующим валом (6) лопасти несущего винта, причем опорная осевая линия (В) валов (6) лопастей несущего винта выполнена с возможностью смещения перпендикулярно направлению своей протяженности относительно приводной осевой линии (А) несущего винта, отличающийся тем, что ось (3) несущего винта содержит множество частей, указанные части оси (3) несущего винта включают в себя по меньшей мере одну опорную ось (3.1) и дополнительную опорную ось (3.2); головка (2) несущего винта в по меньшей мере одной лопастной части (2.2) удерживает по меньшей мере два вала (6) лопастей; обеспечена по меньшей мере одна дополнительная лопастная часть (2.4) с дополнительными валами (10) лопастей, связанная с лопастной частью (2.2); и подвижные части оси (3), опорная ось (3.1) и дополнительная опорная ось (3.2) несущего винта выполнены с возможностью отклонения противоположно, за счет чего валы (6) лопастей и дополнительные валы (10) лопастей подвижны в противоположных направлениях по отношению друг к другу.
2. Вертолет по п. 1, отличающийся тем, что опорная осевая линия (В) несущего винта выполнена с возможностью смещения одним компонентом перпендикулярно продольной оси (L) фюзеляжа (1).
3. Вертолет по п. 1, отличающийся тем, что опорная осевая линия (В) несущего винта выполнена с возможностью смещения в обе стороны от продольной оси (L) фюзеляжа (1).
4. Вертолет по п. 1, отличающийся тем, что приводная осевая линия (А) и опорная осевая линия (В) несущего винта отделены друг от друга.
5. Вертолет по п. 1, отличающийся тем, что множество частей оси (3) несущего винта следуют друг за другом в своем осевом направлении.
6. Вертолет по п. 1, отличающийся тем, что он содержит синусоидальный регулятор (1.1), посредством которого ось (3) несущего винта, ось симметрии которого является опорной осевой линией (В) несущего винта, выполнена с возможностью смещения перпендикулярно последней.
7. Вертолет по п. 6, отличающийся тем, что по меньшей мере один вал (6) лопасти соединен косвенно или непосредственно с синусоидальным регулятором (1.1) с возможностью смещения последним.
8. Вертолет по п. 6, отличающийся тем, что ось (3) несущего винта выполнена с возможностью одно- или двухмерного смещения посредством синусоидального регулятора (1.1).
9. Вертолет по п. 1, отличающийся тем, что по меньшей мере два вала (6) лопастей соединены с осью (3) несущего винта с возможностью смещения с последней.
10. Вертолет по п. 1, отличающийся тем, что по меньшей мере два вала (6) лопастей направляются соответственно качающими подшипниками (7).
11. Вертолет по п. 1, отличающийся тем, что привод валов (6) лопастей осуществляется через головку (2) несущего винта.
12. Вертолет по п. 1, отличающийся тем, что приводная осевая линия (А) совпадает с осью симметрии головки (2) несущего винта.
13. Вертолет по п. 10, отличающийся тем, что приводные силы передаются через качающие подшипники (7) и кольца (8.1, 8.2) несущего винта на валы (6) лопастей.
14. Вертолет по п. 13, отличающийся тем, что кольца (8.1, 8.2) несущего винта соединены с возможностью вращения с качающими подшипниками (7).
15. Вертолет по п. 1, отличающийся тем, что по меньшей мере две части оси (3) несущего винта выполнены подвижными перпендикулярно опорной осевой линии (В) несущего винта.
16. Вертолет по п. 1, отличающийся тем, что по меньшей мере одна часть оси (3) несущего винта неподвижна относительно головки (2) несущего винта.
17. Вертолет по п. 1, отличающийся тем, что по меньшей мере одна часть оси (3) несущего винта соединена с головкой (2) несущего винта или ее компонентами.
18. Вертолет по п. 1, отличающийся тем, что один или более валов (6) лопастей независимо друг от друга закреплены по меньшей мере на одной части оси (3) несущего винта.
19. Вертолет по п. 1, отличающийся тем, что по меньшей мере два вала (6) лопастей независимо друг от друга соединены с автоматом (4) перекоса.
20. Вертолет по п. 1, отличающийся тем, что дополнительная лопастная часть (2.4) расположена над и/или под лопастной частью (2.2).
21. Вертолет по п. 13, отличающийся тем, что по меньшей мере два кольца (8.2, 8.3) несущего винта по меньшей мере двух разных лопастных частей (2.2, 2.4) связаны между собой.
22. Вертолет по п. 1, отличающийся тем, что по меньшей мере на одной из дополнительных лопастных частей (2.4) на дополнительных валах (10) лопастей закреплены противовесы (10.1).
23. Вертолет по п. 22, отличающийся тем, что противовесы (10.1) содержат твердый, жидкий или газообразный материал.
24. Вертолет по п. 22, отличающийся тем, что масса противовесов (10.1) по времени постоянная или может изменяться.
25. Вертолет по п. 1, отличающийся тем, что связь лопастной части (2.2) с дополнительной лопастной частью (2.4) осуществлена посредством ножницеобразной части (2.3).
26. Вертолет по п. 25, отличающийся тем, что ножницеобразная часть (2.3) содержит ползуны (9).
27. Вертолет по п. 1, отличающийся тем, что по меньшей мере один из дополнительных валов (10) лопастей дополнительной лопастной части (2.4) имеет такую же конструктивную форму, что и один из валов (6) лопастей лопастной части (2.2).
28. Вертолет по п. 27, отличающийся тем, что длина по меньшей мере одного дополнительного вала (10) лопасти совпадает с длиной по меньшей мере одного из валов (6) лопастей.
29. Вертолет по п. 28, отличающийся тем, что по меньшей мере одна дополнительная лопастная часть (2.4) содержит по меньшей мере один дополнительный вал (10) лопасти изменяемой длины по сравнению с по меньшей мере одним валом (6) лопасти.
30. Вертолет по п. 1, отличающийся тем, что по меньшей мере одна дополнительная лопастная часть (2.4) снабжена дополнительными лопастями (10.2).
31. Вертолет по п. 1, отличающийся тем, что направление вращения лопастной части (2.2) связано с направлением вращения по меньшей мере одной дополнительной лопастной части (2.4).
32. Вертолет по п. 31, отличающийся тем, что лопастная часть (2.2) связана с одной из дополнительных лопастных частей (2.4) посредством конических зубчатых колес (14.2) в кольце (14.3) с пазом, которое размещено в коаксиальной ножницеобразной части (2.6).
33. Вертолет по п. 19, отличающийся тем, что он содержит по меньшей мере один дополнительный автомат (12) перекоса, выполненный с возможностью управления по меньшей мере одной дополнительной лопастной частью (2.4).
34. Вертолет по п. 19, отличающийся тем, что по меньшей мере один из автоматов (4) перекоса установлен в головке (2) несущего винта.
35. Вертолет по п. 19, отличающийся тем, что по меньшей мере один из автоматов перекоса установлен в крышке (11) несущего винта.
36. Вертолет по п. 33, отличающийся тем, что по меньшей мере один из автоматов (4) перекоса связан с по меньшей мере одним из дополнительных автоматов (12) перекоса.
37. Вертолет по п. 19, отличающийся тем, что по меньшей мере два автомата (4) перекоса и/или дополнительный автомат (12) перекоса соединены между собой тягами и/или рычагами.
38. Вертолет по п. 1, отличающийся тем, что на его фюзеляже (1) расположены крылья (15) и/или вертикальное оперение (16).
39. Вертолет по п. 1, отличающийся тем, что в его фюзеляже (1) расположен генератор (17) в качестве первичного привода (18).
40. Вертолет по п. 39, отличающийся тем, что первичный привод (18) содержит турбины, поршневые моторы, топливные ячейки и/или аккумуляторы.
41. Вертолет по п. 1, отличающийся тем, что в его фюзеляже (1) подвижно на регулируемой каретке (20) установлено опорное кольцо (19), причем опорное кольцо (19) соединено с головкой (2) несущего винта с возможностью смещения вместе с ней в направлении продольной оси (L) фюзеляжа (1).
| US 20120070279 A1, 22.03.2012 | |||
| US 20120189450 A1, 26.07.2012 | |||
| US 5931639 A1, 03.08.1999 | |||
| НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА | 1999 |
|
RU2146637C1 |

