ОБЩАЯ ОБЛАСТЬ ТЕХНИКИ И УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к мониторингу деградации бортового устройства летательного аппарата, в частности, установленного на газотурбинном двигателе. Более конкретно, изобретение относится к устройствам, таким как измерительная цепь, где показатель состояния связан с появлением или отсутствием событий.
Как известно, чтобы контролировать бортовое устройство, формируют показатель, характеризующий деградацию бортового устройства. Этот показатель известен специалисту в данной области под названием показателя дефектности. Классически показатель дефектности формируют на основании измерений физических параметров бортового устройства, например, таких как геометрическое положение, ток управления, угол раскрытия, температура и т.д. Показатель дефектности характеризует степень ущерба от деградации. Предпочтительно показатель дефектности формируют при каждом полете летательного аппарата.
Чтобы определить, действительно ли деградировало бортовое устройство, способ мониторинга содержит этап сравнения показателя дефектности, полученного для данного полета летательного аппарата, с порогом принятия решения и этап передачи тревожного сигнала в случае превышения порога принятия решения. Таким образом, отслеживая изменение показателя дефектности, можно обнаруживать увеличение деградации и можно упреждать риск поломки бортового устройства и улучшить управление операциями обслуживания.
Регулирование порога принятия решения для данной деградации является первостепенным, учитывая, с одной стороны, что слишком низкий порог принятия решения приводит к частой передаче тревожных сигналов, тогда как деградация ее не наступила (ложный тревожный сигнал), и, с другой стороны, что слишком высокий порог принятия решения блокирует передачу тревожных сигналов, тогда как деградация наступила (отсутствие обнаружения).
Классически для каждой отслеживаемой деградации эмпирическим путем определяют значение порога принятия решения. Чтобы обеспечить максимальную безопасность, как правило, значение порогов принятия решения занижают, чтобы минимизировать риск отсутствия обнаружения. В результате этого число ложных тревог остается большим, что является недостатком для авиакомпаний, которые вынуждены часто осуществлять операцию обслуживания, тогда как бортовое устройство летательного аппарата не ухудшило свои характеристики. Для устранения этого недостатка авиакомпании выдвигают перед изготовителями бортовых устройств технические условия, предполагающие снижение риска ошибки. Учитывая требование точности, вводится запрет на любое эмпирическое определение порога принятия решения для способа мониторинга неисправностей.
В патентной заявке FR 1254506 предложено решение этой проблемы и описан способ мониторинга деградации бортового устройства летательного аппарата, осуществляемый вычислительным устройством, при этом степень деградации бортового устройства определяют по показателю дефектности, сформированному на основании измерений физических параметров бортового устройства, при этом способ мониторинга содержит этап сравнения показателя дефектности, полученного для данного полета летательного аппарата, с порогом принятия решения и этап передачи тревожного сигнала в случае превышения порога принятия решения, при этом порог принятия решения определяется автоматически для данной вероятности тревожного сигнала Ра, соответствующей вероятности того, что тревожный сигнал может быть передан в ходе способа мониторинга, тогда как бортовое устройство является исправным, путем осуществления следующих этапов:
- этап вычисления множества показателей дефектности для множества полетов летательного аппарата без деградации, чтобы получить распределение плотности вероятности показателя дефектности, при этом распределение связано с физической природой бортового устройства;
- этап коррекции распределения при помощи непараметрического средства оценки плотности вероятности, чтобы получить скорректированную непрерывную функцию распределения;
- этап вычисления скорректированной непрерывной функции раздачи на основании скорректированной непрерывной функции распределения; и
- этап считывания антецедента скорректированной непрерывной функции раздачи для данного значения (1-Ра в предшествующем запросе), при этом антецедент соответствует порогу принятия решения.
В патентной заявке FR 1358593 предложено усовершенствовать предыдущее изобретение путем принятия стратегии подтверждения «k среди n», при которой тревожный сигнал передается, только если за n следующих один за другим полетов произошло не менее k превышений порога.
Этот способ позволяет автоматически определять порог принятия решения с высокой точностью в зависимости от вероятности тревожного сигнала Ра, соответствующей требованиям авиакомпаний. Такой способ является надежным по сравнению с предыдущими способами. Он позволяет точно обнаруживать любую деградацию бортового устройства и упреждать любую его неисправность во время мониторинга.
Однако, как правило, такой способ можно применять, только если распределение показателя дефектности является не непрерывном, а дискретным.
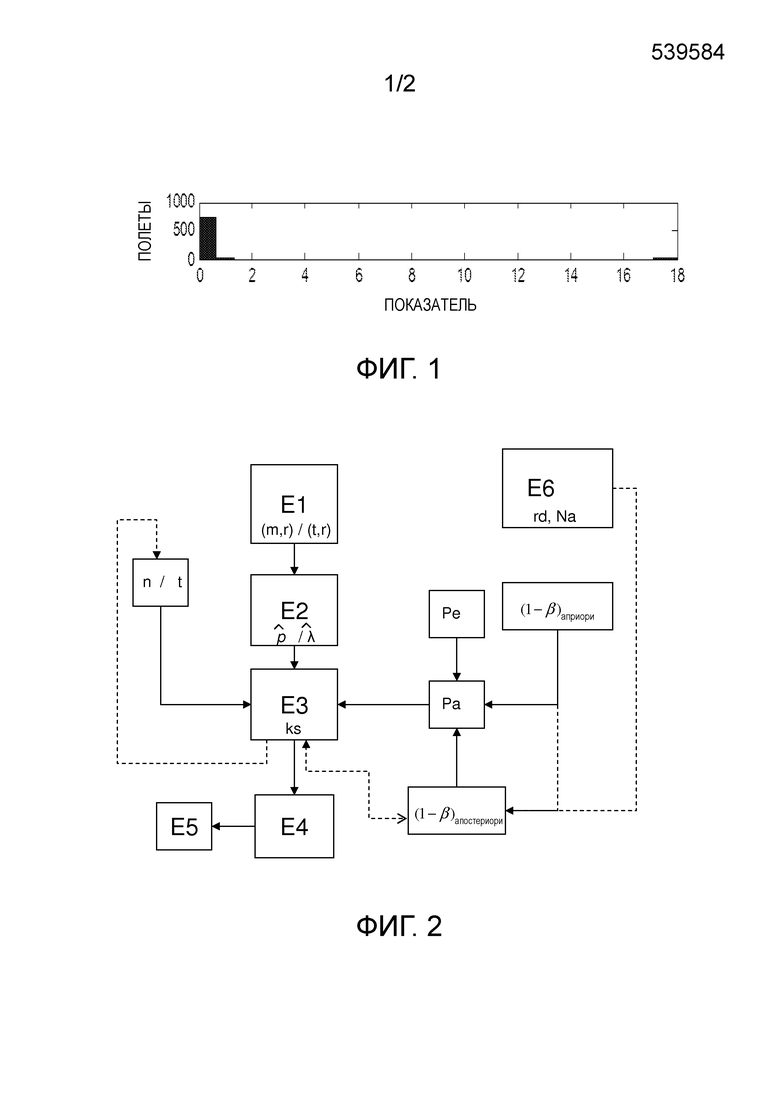
Например, из патентной заявки, поданной во Франции 15 сентября 2001 года под номером 2980266 компанией СНЕКМА, известна система мониторинга измерительной цепи турбореактивного двигателя, для которой показатель дефектности определяют в ходе следующих один за другим инкрементов времени путем подсчета количества «нежелательных» переходов от слова состояния «ОК» к другому слову состояния, указывающему на нарушение в работе. Иногда бывает, что этот подсчет является почти нулевым. В примере, представленном на фиг. 1, на общее количество 750 полетов без деградации в одном полете произошла одна деградация, а в другом восемнадцать, при этом на всех других полетах не отмечалось нежелательного перехода. В этом случае не следует корректировать непрерывное распределение на гистограмме, полученной на фиг. 1, и выводить на ее основании порог для подсчета, адаптируя предыдущие методы.
Таким образом, существует потребность в определении стратегии мониторинга деградации бортового устройства летательного аппарата на основании подсчета событий с низким возникновением появления, обеспечивающей автоматическое срабатывание тревожного сигнала, с одновременным надежным и точным соблюдением данной вероятности тревожного сигнала Ра.
Изобретением предложено простое и эффективное решение этой задачи.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В связи с этим изобретением предложен способ мониторинга деградации бортового устройства летательного аппарата во время его работы, осуществляемый вычислительным устройством, при этом степень деградации бортового устройства определяют по показателю дефектности, сформированному путем подсчета возникновений дефектов, отмечаемых системой контроля устройства в ходе его работы, при этом способ мониторинга содержит этап сравнения полученного показателя дефектности для последовательности наблюдения данной длины с порогом ks принятия решения и этап передачи тревожного сигнала в случае достижения или превышения порога ks принятия решения, при этом порог ks принятия решения определяют автоматически для данной вероятности тревожного сигнала Ра, соответствующей вероятности того, что тревожный сигнал передан в ходе способа мониторинга, тогда как бортовое устройство является исправным, путем осуществления следующих этапов:
- этап получения показателя дефектности по меньшей мере за одну контрольную последовательность, соответствующий полетам летательного аппарата без деградации и длиной, равной множеству длин последовательностей наблюдения;
- этап коррекции правила дискретной вероятности, позволяющий найти показатель дефектности, полученный на контрольной последовательности;
- этап вычисления порога ks принятия решения таким образом, чтобы при применении правила дискретной вероятности, скорректированного на предыдущем этапе, к последовательности наблюдения, имеющей данную длину, вероятность того, что показатель дефектности, превышающий или равный порогу (ks) принятия решения, получается количество S раз за N следующих одна за другой последовательностей, была меньше элементарной вероятности Реас превышения порога, оцененной на основании данной вероятности тревожного сигнала Ра, при этом N и S могут быть равными одному.
Предпочтительно элементарную вероятность Реас превышения порога оценивают на основании данной вероятности тревожного сигнала Ра при помощи формулы:
Реас= (Pa)
(Pa)
в которой N является числом последовательностей наблюдения, S является количеством раз, когда порог ks оказывается превышенным за N следующих одна за другой последовательностей, и является эйлеровой функцией бета-распределения, обратной параметрам S и N-S+1.
Иначе говоря, значение порога ks является числом возникновений дефектов в ходе последовательности наблюдения, начиная от которого предположение, что исправное устройство, показывающее вероятность возникновения дефекта, характеризующуюся правилом дискретной вероятности, которое было скорректировано по контрольной последовательности, не подтверждается при вероятности, большей, чем Ра, или Реас. Следовательно, если число возникновений дефектов за последовательность наблюдения достигает порога ks принятия решения либо один раз, либо р раз при стратегии с подтверждением, можно сделать вывод, что поведение устройства не соответствует устройству без деградации с риском ошибки ниже Ра. При применении известных правил вероятностей можно вычислить этот порог ks принятия решения, используя выражение их правила обратного распределения. Этот способ представляет особый интерес, когда надежность устройства приводит к тому, что обнаружение дефектов соответствует подсчету редких событий, когда непрерывное правило невозможно идентифицировать на гистограмме подсчетов.
Согласно предпочтительному признаку изобретения, используемое правило дискретной вероятности отображает явление, возникновения которого имеют вероятность за единицу времени, при этом второй этап соответствует оценке вероятности за единицу времени в правиле дискретной вероятности для достижения показателя дефектности, полученного за контрольную последовательность. Упомянутое правило вероятности может быть биномиальным правилом или правилом Пуассона, параметрированным по вероятности за единицу времени и по длине последовательности.
В предыдущем случае оценка вероятности за единицу времени возникновения дефектов для системы без деградации в правиле дискретной вероятности может быть равной мажоранте этой вероятности за единицу времени с данной достоверностью для показателя дефектности в контрольной последовательности. Предпочтительно оценка вероятности за единицу времени равна максимуму правдоподобия, соответствующему показателю дефектности, полученному за контрольную последовательность.
Предпочтительно последовательность наблюдения соответствует нескольким следующим один за другим полетам летательного аппарата.
Заявленный способ может содержать этап предварительного определения данной длины для последовательностей наблюдения. Чем больше длина последовательности наблюдения, тем выше порог ks принятия решения и тем лучше соблюдается вероятность тревожного сигнала Ра или элементарная вероятность Реас. С другой стороны, явление деградации до поломки должно быть как можно более медленным для возможности его своевременного обнаружения. Следовательно, выбор длины последовательности наблюдения может быть основан на рабочих обоснованиях срока демонтажа и динамики физической деградации до поломки.
Предпочтительно эту длину последовательности наблюдения можно выбирать таким образом, чтобы порог (ks) принятия решения находился в пределах от трех до десяти. В представленном примере длина последовательности наблюдения равна 60000 инкрементов времени, и значение вычисленного при помощи способа порога принятия решения принимает значение 6.
Согласно предпочтительному признаку изобретения, вероятность тревожного сигнала Ра получают при помощи следующей формулы:

в которой:
Ре соответствует вероятности того, чтобы бортовое устройство является исправным, тогда как передан тревожный сигнал;
Pd соответствует вероятности деградации для последовательности наблюдения; и
(1-β)априори соответствует вероятности априорного обнаружения деградации.
Предпочтительно вероятность тревожного сигнала Ра определяют в зависимости от вероятности ошибки Ре, которая соответствует практическим требованиям авиакомпаний, которые стремятся уменьшить число бесполезных этапов обслуживания бортовых устройств.
Предпочтительно способ также содержит:
- этап осуществления способа мониторинга деградации бортового устройства с предварительно определенным порогом (ks) принятия решения для множества показателей дефектности, сформированных для множества последовательностей наблюдения с деградацией, чтобы на этом основании получить вероятность апостериорного обнаружения деградации (1-β)апостериори,
- этап определения новой вероятности тревожного сигнала Ра в зависимости от вероятности апостериорного обнаружения деградации (1-β)апостериори,
- этап определения нового уточненного порога (ks) принятия решения на основании новой вероятности тревожного сигнала.
Предпочтительно эти этапы позволяют быстро и надежно уточнить значение порога принятия решения.
ОПИСАНИЕ ФИГУР
Изобретение будет более понятно из нижеследующего описания, представленного исключительно в качестве примера, со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 - распределение показателей дефектности, полученных для бортового измерительного устройства летательного аппарата для множества полетов без деградации.
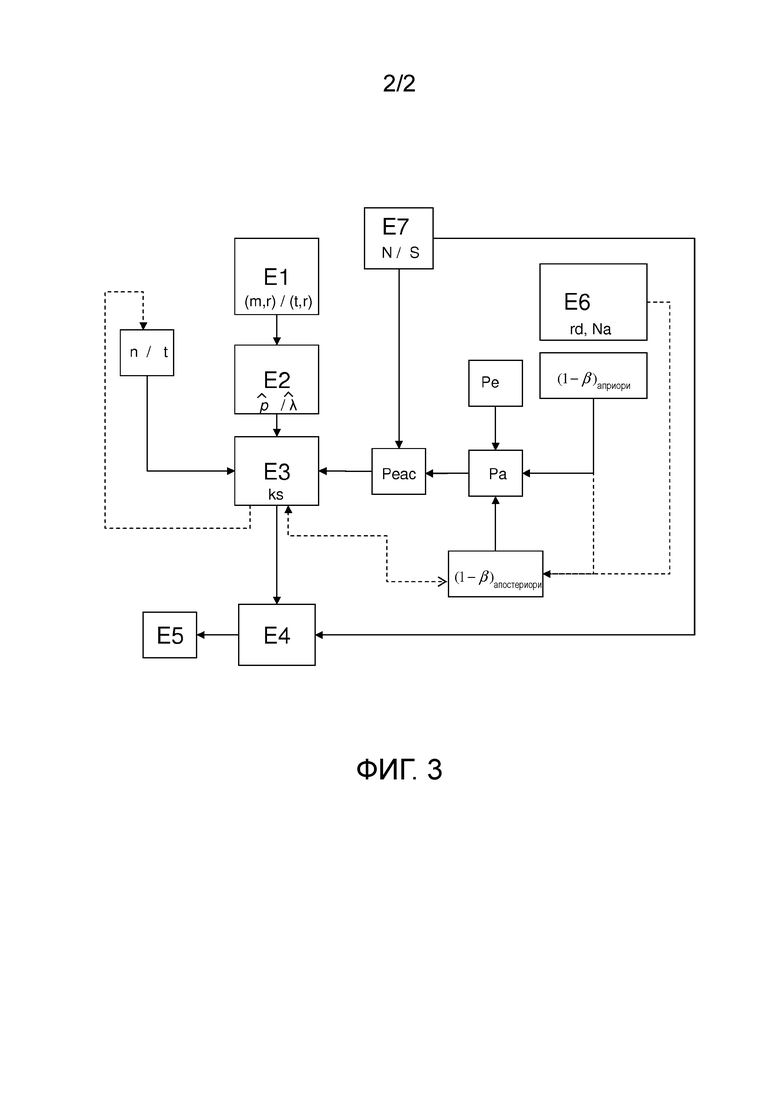
Фиг. 2 - блок-схема способа мониторинга, содержащего этапы автоматического определения порога принятия решения в соответствии с изобретением.
Фиг. 3 - блока-схема версии способа мониторинга, содержащей этапы автоматического определения порога принятия решения в соответствии с изобретением.
ОПИСАНИЕ ОДНОГО ИЛИ НЕСКОЛЬКИХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Далее следует описание автоматического определения порога принятия решения для способа мониторинга деградации бортового устройства летательного аппарата, известного, например, из патентной заявки, поданной под номером 1358593 компанией СНЕКМА.
Как известно, степень деградации бортового устройства определяют при помощи показателя дефектности, полученного в ходе «временных отметок», определяющих равномерные унитарные инкременты времени, путем подсчета количества нежелательных переходов показателя состояния устройства, зафиксированного системой мониторинга. В представленном случае состояние устройства может принимать два значения и, следовательно, может быть закодировано в двоичном виде, чтобы сигнализировать о возможном возникновении дефекта. Предпочтительно показатель дефектности формируется бортовым вычислительным устройством летательного аппарата, связанным с контролируемым бортовым устройством через линию связи.
Чтобы учитывать тот факт, что работа устройства может иметь дефекты, даже если оно не пришло к деградации, способ, как и в известном решении, соответствует стратегии, заключающейся в том, чтобы передавать тревожный сигнал только при вероятности тревожного сигнала Ра, соответствующей заданному количеству ложных тревог Pfa.
Во время передачи тревожного сигнала авиакомпания должна осуществить этап обслуживания бортового устройства, чтобы избежать поломки упомянутого бортового устройства.
Вероятность тревожного сигнала
Под вероятностью тревожного сигнала следует понимать вероятность того, что в ходе способа мониторинга передается тревожный сигнал, тогда как бортовое устройство является исправным, то есть не имеет проявляющейся деградации. Иначе говоря, вероятности тревожного сигнала Ра в 1% соответствует передаче одного тревожного сигнала за 100 полетов без деградации.
На практике вероятность тревожного сигнала Ра не определяется напрямую. Действительно, требования авиакомпаний выдвигают в качестве критерия вероятность ошибки Ре, которая соответствует вероятности того, что бортовое устройство является исправным, тогда как передается тревожный сигнал. Иначе говоря, вероятность ошибки Ре в 1% соответствует исправному бортовому устройству для 100 переданных тревожных сигналов.
На практике, когда в рамках способа мониторинга передается тревожный сигнал, авиакомпания осуществляет операцию обслуживания. Таким образом, ограничение вероятности ошибки Ре позволяет авиакомпаниям ограничить число операций обслуживания бортового устройства, которое является исправным, поскольку такие операции обслуживания приводят к ненужным эксплуатационным расходам.
Предпочтительно вероятность тревожного сигнала Ра определяют в зависимости от вероятности ошибки Ре при помощи нижеследующей формулы (F1) условной вероятности:
(F1) 
Формула (F1) содержит следующие параметры:
- β соответствует вероятности отсутствия обнаружения деградации для данного полета, при этом 1-β соответствует вероятности обнаружения деградации; и
- Pd соответствует вероятности деградации для данного полета.
Формулу (F1) выводят на основании уравнений условной вероятности, в которых вероятность Ра соответствует тревожному сигналу при известности того, что устройство является исправным (Ра=Р(Тревожный сигнал|Исправно)), и вероятность Ре соответствует исправному устройству при известности того, что передан тревожный сигнал (Ре=Р(Исправно|Тревожный сигнал)).


Иначе говоря

Кроме того, поскольку
Р(Тревожн. сигнал)=Р(Тревожн. cигн.∩Испр.)+
+Р(Тревожн.cигн.∩Деградация)
Р(Тревожн. cигн.)=Р(Тревожн. cигн.|испр.).Р(Испр.)+
+Р(Тревожн. cигн.|Деградация.Р(Деградация)
При
Р(Деградация)=Pd
Р(Испр.)=1-Pd
Р(Тревожн. Сигн.|Деградация)=1-β
Р(Тревожн. cигн.|Испр.)=Ра
Р(Испр.|Тревожн.сигн.)=Ре
Р(Тревожн. cигн.)=Р(Тревожн. сигн.|Испр.).Р(Испр.)+
+Р(Тревожн. сигн.|Деградация).Р(Деградация)
Р(Тревожн. сигн.)=Ра.(1-Pd)+(1-β).Pd
Р(Тревожн. сигн.)=Ра.(1-Pd)+(1-β).Pd
На основании двух неравенств, относящихся к Р(Тревожный сигнал), выводят (F1).
В формуле (F1) вероятность деградации для данного полета Pd известна и определена экспериментальным путем или посредством оценки и может, например, составлять 10-7. Вероятность обнаружения деградации (1-β)априори устанавливают «априори» в значении 1 и уточняют путем итерации, что будет подробно описано ниже, чтобы повысить точность порога принятия решения.
Например, классически получают вероятность тревожного сигнала Ра порядка 5.10Е-8 при требуемой вероятности ошибки Ре порядка 5%, вероятности обнаружения деградации (1-β)априори порядка 1 и вероятности деградации для полета Pd порядка 10-6.
Дискретный показатель дефектности и правило дискретной вероятности
В рамках настоящего метода определяют длину последовательности наблюдения, состоящую в данном примере из числа n инкрементов отсчета, и порог ks по числу k возникновений дефектов, соответствующих, например, нежелательным переходам во время последовательности, может привести к срабатыванию тревожного сигнала. Длина последовательности наблюдения может соответствовать одному полету или нескольким следующим один за другим полетам. Показатель дефектности за эту последовательность определяют как число k возникновений дефектов.
Однако при этом не определяют, как в вышеуказанных примерах, порог по значению показателя дефектности, который предполагается непрерывным. Способ использует правило дискретной вероятности для отображения возникновений дефектов и оценки порога ks, начиная от которого может сработать тревожный сигнал, соблюдая при этом вероятность тревожного сигнала Ра.
В первом примере варианта осуществления используют правило вероятности, представляющее собой биномиальное распределение.
Биномиальное правило параметров n и р соответствует по сути дела независимому возобновлению n раз за последовательность выборки события, которое имеет вероятность р произойти и вероятность (1-р) не произойти. При этом подсчитывают число возникновений события, в данном случае дефекта, и обозначают Х случайную переменную, показывающую это число возникновений за последовательность n выборок.
Вероятность того, что случайная переменная Х примет значение от 0 до n за последовательность, получают при помощи биномиального распределения:
P(X=k)= pk.(1-p)n-k
pk.(1-p)n-k
Функция распределения правила биномиального распределения Fn,p дает вероятность того, что случайная переменная Х может принять значение, меньшее или равное k, для последовательности n выборок.
Значение Fn,p(k) функции распределения правила биномиального распределения по X=k можно также выразить, используя эйлерову функцию бета-распределения вероятности возникновения р на одну выборку и параметров k+1 и n+1.
Это правило вероятности хорошо подходит для описанного случая, в котором подсчет возможных дефектов производят через равномерные интервалы унитарной продолжительности, получаемые по «временным меткам» системы мониторинга во время полета.
В втором примере варианта осуществления используют правило вероятности Пуассона.
Правило Пуассона для параметра (λ.t) соответствует поведению числа дефектов, происходящих в последовательности наблюдения, длиной которого является время t, если эти дефекты проявляются с известной средней частотой λ и независимо от времени, прошедшего между двумя возникновениями дефектов. Эта частота соответствует вероятности возникновения за единицу времени.
Вероятность того, что существует k возникновений дефектов за последовательность наблюдения, получают в случае, когда t является кратным инкременту времени, для которого выражена частота λ, следующим образом:
P(X=k)=exp(-λ t).
Функция распределения правила Пуассона Fλ,t дает вероятность того, что случайная переменная Х может принять значение, меньшее или равное k, для последовательности длиной t.
Значение Fλ,t(k) функции распределения правила Пуассона по Х=k можно также выразить при помощи эйлеровой функции гамма-распределения частоты λ.t возникновения за время t, параметрами которой являются k+1 и t.
Правило Пуассона представляет собой переход через границу биномиального правила, когда число выборок является очень большим. Оно подходит также для описанного случая, когда число «временных меток» является очень большим. Оно подходит также для случая устройства, система мониторинга которого будет показывать дефекты, только когда они происходят, то есть через неравномерные интервалы. В этом случае правило Пуассона позволяет осуществлять вычисления за интервал времени, который не является кратным инкрементам между последовательными подсчетами.
Пример первого варианта осуществления способа
Далее следует описание способа с применением биномиального правила, при этом система мониторинга показывает двоичный результат возникновения или не возникновения дефекта при равномерных инкрементах времени.
Как показано на фиг. 2, способ начинается с первого этапа Е1 выделения множества показателей дефектности для множества полетов без деградации с контролируемым устройством.
В частности, этот этап Е1 позволяет создать по меньшей мере одну контрольную последовательность, состоящую из большого числа полетов без деградации, который соответствует очень большому числу инкрементов времени обнаружения показателя дефектов для устройства без деградации, и сформировать показатель дефектности r за эту контрольную последовательность, равный сумме возникновений дефектов.
В примере, соответствующем мониторингу устройства, описанному в патентной заявке под номером 1358593, и представленном на фиг.1, результаты наблюдали за 750 полетов без деградации, при этом каждый полет включал в себя 1200 инкрементов времени в переходной фазе, соответствующих времени, в течение которого устройство было задействовано. Это позволяет построить контрольную последовательность длиной m, при этом m равно 750×1200=90 000 инкрементов времени, за который был отмечен показатель r дефектности, при этом r равен 1+18=19.
Второй этап Е2 способа до начала мониторинга состоит в нахождении оценки  вероятности р возникновения дефекта при каждом инкременте времени, используя контрольную последовательность.
вероятности р возникновения дефекта при каждом инкременте времени, используя контрольную последовательность.
Оценку можно получить, взяв мажоранту  для р со степенью достоверности α. Ее значение получают при помощи формул:
для р со степенью достоверности α. Ее значение получают при помощи формул:  .
.
 является функцией биномиального распределения параметров m и p, где m является числом инкрементов времени контрольной последовательности, и р является вероятностью возникновения, применяемой для показателя дефектности r, отмеченного для контрольной последовательности.
является функцией биномиального распределения параметров m и p, где m является числом инкрементов времени контрольной последовательности, и р является вероятностью возникновения, применяемой для показателя дефектности r, отмеченного для контрольной последовательности.
 , которое является эйлеровой функцией бета-распределения, обратной параметрам r+1 и m-r, позволяет напрямую вычислить оценку со степенью достоверности α.
, которое является эйлеровой функцией бета-распределения, обратной параметрам r+1 и m-r, позволяет напрямую вычислить оценку со степенью достоверности α.
Таким образом, в рамках способа можно использовать α=90% или α=50%. Можно также использовать значение α=44%, которое соответствует максимуму правдоподобия. В этом случае оценку получают из отношения r/m.
При значениях последовательности мониторинга, представленного в примере на фиг. 1, длиной m=90 000 инкрементов при показателе дефектности r=19, получаем  =2,898 10-5,
=2,898 10-5,  =2,19 10-5 и оценочное значение максимума правдоподобности
=2,19 10-5 и оценочное значение максимума правдоподобности  =2,11 10-5.
=2,11 10-5.
Затем способ содержит третий этап Е3, на котором определяют порог ks за число k возникновений дефектов в последовательности наблюдения длиной n инкрементов времени, при котором считается, что вероятность возникновения дефектов превышает оценку вероятности возникновения дефектов для устройства без деградации, полученную на предыдущем этапе Е2 на основании контрольной последовательности, с вероятностью ошибки, равной значению Ра, определенному при помощи формулы F1.
Для этого порог ks обнаружения деградации за число k возникновений дефектов в ходе последовательности наблюдения в n инкрементов определяют таким образом, чтобы ks было наименьшим целым числом, при котором функция распределения правила вероятности за последовательность наблюдения, то есть вероятности существования k дефектов при любом k, меньшем ks за эту последовательность, приближается к единице, при условии данной вероятности тревожного сигнала Ра.
Это выражается формулой:
(F2) 
где  является функцией биномиального распределения параметров, то есть числа инкрементов n, выбранных для последовательности наблюдения, и оценки вероятности возникновения дефекта при каждом инкременте для устройства без деградации, полученной на предыдущем этапе Е2.
является функцией биномиального распределения параметров, то есть числа инкрементов n, выбранных для последовательности наблюдения, и оценки вероятности возникновения дефекта при каждом инкременте для устройства без деградации, полученной на предыдущем этапе Е2.
 является эйлеровой функцией бета-распределения параметров k и n-k+1, применяемой для оценки вероятности возникновения.
является эйлеровой функцией бета-распределения параметров k и n-k+1, применяемой для оценки вероятности возникновения.
Иначе говоря, ks является числом возникновений дефектов среди n инкрементов времени последовательности наблюдения, начиная от которого предположение, что истинная вероятность р на инкремент времени возникновений дефектов равна оценке , не подтверждается при вероятности, большей, чем Ра. Следовательно, если k больше или равно ks, можно сделать вывод, что вероятность р на инкремент времени возникновений дефектов превысила оценку для устройства без деградации с вероятностью ошибки менее Ра.
Выбор числа n инкрементов для последовательности наблюдения является результатом компромисса. Это число не должно быть слишком малым, так как это приводит к слишком малому значению ks и к слишком большой неточности для соблюдаемой вероятности тревожного сигнала. С другой стороны, это число не должно быть слишком большим, так как в этом случае существует риск оставить без внимания развитие деградации контролируемого устройства.
Выбор длины n последовательности наблюдения можно осуществить на основании знания устройства при помощи моделирований до осуществления способа в бортовом вычислительном устройстве. В версии способа можно осуществить дополнительный этап для уточнения длины последовательности наблюдения в зависимости от значений порога ks, вычисленного на этапе Е3, таким образом, например, чтобы этот порог принял значение между несколькими единицами и десятью.
На практике для мониторинга устройств в области авиации длина n инкрементов последовательности наблюдения соответствует нескольким следующим один за другим полетам, при этом предпочтительно число nv полетов составляет от трех до десяти.
Для устройства, указанного выше в качестве иллюстрации, последовательность наблюдения из пяти следующих один за другим полетов соответствует n=5×1200=6000 инкрементов наблюдения. Выбрав целевое значение 5.10-8 для вероятности тревожного сигнала Ра, применение формулы F2 дает значение ks, равное шести (ks=6).
Затем способ содержит этап Е4 мониторинга работающего устройства, который следует следующим одна за другой последовательностям наблюдений в n инкрементов, например, в течение числа nv следующих один за другим полетов. На этом этапе Е4 тревожный сигнал Е5 срабатывает, если число возникновений дефектов достигает значения ks во время последовательности наблюдения.
Пример второго варианта осуществления способа
Во втором варианте осуществления используют правило Пуассона, при этом система мониторинга показывает двоичный результат дефекта или отсутствия дефекта при равномерных инкрементах времени, как в первом варианте.
Первый этап Е1 выделения множества показателей дефектности для множества полетов без деградации с контролируемым устройством идентичен такому же этапу в первом варианте. В данном случае контрольная последовательность из m инкрементов времени имеет продолжительность, равную tc. Поскольку в данном примере инкременты имеют одинаковую унитарную продолжительность, то продолжительность tc последовательности можно выразить в виде числа инкрементов.
На втором этапе Е2 способа до начала мониторинга определяют оценку  средней частоты λ возникновения дефекта при каждом инкременте времени, используя контрольную последовательность.
средней частоты λ возникновения дефекта при каждом инкременте времени, используя контрольную последовательность.
Оценку получают, используя мажоранту  для значения λ при степени достоверности α. Ее значение получают при помощи формул:
для значения λ при степени достоверности α. Ее значение получают при помощи формул:  (α)
(α)
 является функцией Пуассона распределения параметра λ.tc, где tc является продолжительностью контрольной последовательности, и λ является вероятностью возникновения на инкремент времени унитарной продолжительности, применяемой для показателя дефектности r, отмеченного для контрольной последовательности.
является функцией Пуассона распределения параметра λ.tc, где tc является продолжительностью контрольной последовательности, и λ является вероятностью возникновения на инкремент времени унитарной продолжительности, применяемой для показателя дефектности r, отмеченного для контрольной последовательности.
 является эйлеровой функцией гамма-распределения, обратной параметрам r+1 и tc, которая позволяет напрямую вычислить оценку при степени достоверности α.
является эйлеровой функцией гамма-распределения, обратной параметрам r+1 и tc, которая позволяет напрямую вычислить оценку при степени достоверности α.
В варианте можно также определить оценку при помощи значения  , где
, где  является функцией обратного распределения χ2 с 2r+2 степенями свободы.
является функцией обратного распределения χ2 с 2r+2 степенями свободы.
Для осуществления способа, как и в первом варианте, можно использовать значение α=90%, α=50% или α=44%, которое соответствует максимуму правдоподобия.
При значениях последовательности мониторинга, представленных в качестве примера на фиг. 1, для длины tc=90 000, подсчитанной в инкрементах времени, с показателем дефектности r=19, получаем значение  =2,88 10-5,
=2,88 10-5,  =2,19 10-5 и оценочное значение максимума правдоподобия
=2,19 10-5 и оценочное значение максимума правдоподобия  .
.
На третьем этапе Е3 этого варианта осуществления способа определяют порог ks за число k возникновений дефектов в последовательности наблюдения продолжительностью t, при котором считается, что вероятность возникновения дефектов превышает оценку вероятности возникновения дефектов для устройства без деградации, полученную на основании контрольной последовательности, с вероятностью ошибки, равной значению Ра, определенному при помощи формулы F1.
Для этого, аналогично первому варианту осуществления, порог ks обнаружения за число k возникновений дефектов в течение времени t последовательности наблюдения определяют как наименьшее целое число, при котором функция распределения правила вероятности за последовательность наблюдения приближается к единице, при условии данной вероятности тревожного сигнала Ра.
Это выражается формулой:
(F3) 
где  является функцией Пуассона распределения параметра
является функцией Пуассона распределения параметра  , равного произведению продолжительности t, выбранной для последовательности наблюдения, и оценки частоты возникновения дефектов при каждом инкременте для устройства без деградации, полученной на предыдущем этапе.
, равного произведению продолжительности t, выбранной для последовательности наблюдения, и оценки частоты возникновения дефектов при каждом инкременте для устройства без деградации, полученной на предыдущем этапе.
Гk,t является эйлеровой функцией гамма-распределения параметров, то есть числа k возникновений дефектов за последовательность наблюдения и продолжительности t последовательности наблюдения.
В предпочтительном альтернативном варианте можно использовать функцию распределения χ2 с 2k степенями свободы  для оценки ks в формуле F3.
для оценки ks в формуле F3.
Те же аргументы, что и в первом варианте осуществления, позволяют сделать вывод, что, если k превышает или равно ks, средняя частота λ возникновения дефекта при каждом инкременте превысила оценку для устройства без деградации с вероятностью ошибки менее Ра.
Выбор числа n инкрементов для последовательности наблюдения производят так же, как и в описанном первом варианте осуществления. На практике при мониторинге устройства в области авиации длина последовательности наблюдения соответствует нескольким следующим один за другим полетам, при этом их число n предпочтительно составляет от трех до десяти.
Для примера, приведенного выше в качестве иллюстрации, последовательность наблюдения из пяти следующих один за другим полетов соответствует продолжительности t, равной 6000 инкрементов наблюдения. Выбрав целевое значение 5.10-8 для вероятности тревожного сигнала Ра, применение формулы F2 дает значение ks, равное шести (ks=6).
Сходность результатов, полученных в двух вариантах осуществления, согласуется с тем, что оба применяемых правила вероятности являются эквивалентными на очень большом числе инкрементов.
Вариант, иллюстрирующий стратегию подтверждения р превышений порога для q последовательностей
Два предыдущих варианта осуществления были представлены для передачи тревожного сигнала, как только за последовательность превышается порог. В версии к этим вариантам осуществления можно применить стратегию подтверждения «S среди N», независимо от правила дискретной вероятности, применяемого для получения показателя дефектности r за последовательность.
В этой стратегии тревожный сигнал передается, если число возникновений дефектов превышает S раз порог ks для N следующих одна за другой последовательностей. С другой стороны, в данном случае значение порога ks соответствует оценке Реас элементарной вероятности тревожного сигнала за последовательность, повторяющийся N раз, чтобы наблюдать S раз превышение порога с не деградированным устройством, имеющим вероятность тревожного сигнала Ра на последовательность.
Для этого можно рассмотреть число k возникновений дефектов за последовательность как случайную переменную на основании распределения Бернулли, приняв последовательности в качестве инкрементов. В этом случае Реас можно оценить при помощи формулы:
(F4) Реас= (Pa)
в которой N является числом последовательностей наблюдения, S является минимальным количеством раз, когда порог ks оказывается многократно превышенным, для подтверждения продолжения передачи тревожного сигнала, и является эйлеровой функцией бета-распределения, обратной параметрам S и N-S+1. Если каждое из значений N и S равно одному, получаем Реас=Ра.
В этой версии, как показано на фиг. 3, способ содержит этап Е7, соответствующий выбору N и S для вычисления значения Реас, которое будет использовано вместо Ра на этапе Е3 для вычисления порога ks с целью соблюдения вероятности тревожного сигнала Ра при стратегии подтверждения, затем на этапе Е4, на котором передают тревожный сигнал после наблюдения S раз превышения порога в N следующих одна за другой последовательностях.
Чем больше значения N и S, выбранные на этапе Е7, тем будет ниже порог обнаружения для подтверждения по р превышениям среди q. С другой стороны, явление деградации до поломки должно быть более медленным, чтобы его можно было своевременно обнаружить. Следовательно, выбор N опирается на рабочие предположения срока демонтажа и динамики физической деградации до поломки. После выбора N можно выбрать также значение S для максимизации вероятности обнаружения. Кроме того, как правило, одна последовательность соответствует одному полету.
Уточнение значения порога принятия решения
Ранее было представлено определение порога принятия решения, при котором вероятность тревожного сигнала Ра известна, или ее оценивают на основании вероятности ошибки Ре. Если вероятность тревожного сигнала Ра оценена, факультативно можно осуществить этап уточнения порога S принятия решения путем уточнения вероятности обнаружения деградации (1-β), как показано на блок-схемах на фиг. 2 и 3.
Как показано на фиг. 2, на этапе оценки Е6 способ мониторинга осуществляют с порогом ks принятия решения, как он был определен для множества последовательностей наблюдения во время полетов без деградации, предпочтительно полученных путем моделирования. В ходе способа мониторинга показатели дефектности, полученные за последовательности наблюдения, сравнивают с порогом ks принятия решения, что позволяет вывести «апостериори» вероятность обнаружения деградации (1-β). Действительно, достаточно наблюдать число Na переданных тревожных сигналов по отношению к числу последовательностей наблюдения, соответствующему контролируемым полетам без деградации.
Как показано на фиг. 2, путем итерации на этапах определения порога принятия решения значение (1-β)априори заменяют значением (1-β)апостериори, полученным во время уточнения, чтобы получить новое, более точное значение порога S принятия решения. Этап уточнения можно повторять, чтобы приблизиться к наиболее точному порогу S принятия решения.
В варианте применения изобретения способ мониторинга деградации бортового устройства летательного аппарата, метод автоматического определения порога принятия решения и способ генерирования деградаций осуществляют при помощи вычислительного устройства, предпочтительно при помощи множества процессоров вычислительного устройства.
Например, способ мониторинга осуществляют с целью контроля измерительной цепи на турбореактивном двигателе.
Процессор определения порога принятия решения получает множество показателей дефектности без деградации от процессора мониторинга и определяет при данной вероятности ошибки Ре и вероятности обнаружения «априори» деградации при помощи способа мониторинга порог ks принятия решения. После определения порога ks принятия решения его передают в процессор мониторинга, который может сравнить показатели дефектности, вычисленные за последовательности наблюдения такой же продолжительности (n,t), что и продолжительность, используемая в способе мониторинга, с указанным порогом ks принятия решения для контроля изменения деградации измерительной цепи на турбореактивном двигателе.
Чтобы уточнить значение порога ks принятия решения, процессор генерирования деградации моделирует деградированные полетные данные, которые поступают в процессор мониторинга, который передает определенное количество тревожных сигналов в зависимости от полученных данных, что позволяет «апостериори» вывести на этом основании вероятность обнаружения деградации при помощи способа мониторинга. Затем это значение поступает в процессор определения порога ks1 принятия решения, который выдает новое значение порога ks принятия решения для новой полученной вероятности обнаружения.
Процесс повторяют до сходимости значения порога ks принятия решения. На практике удовлетворительную сходимость получают на основании двух итераций.
Изобретение было представлено для измерительной цепи на турбореактивном двигателе, но его можно применять для любого бортового устройства летательного аппарата.
Изобретение относится к способу мониторинга деградации бортового устройства летательного аппарата во время его работы. Для этого с помощью вычислительного устройства определяют степень деградации бортового устройства по показателю дефектности, который определяют подсчитыванием возникающих дефектов системой контроля устройства в ходе его работы определенным образом, сравнивают показатель дефектности с порогом принятия решения, передают тревожный сигнал в случае его достижения или превышения. Обеспечивается автоматическое срабатывание тревожного сигнала в зависимости от его вероятности. 9 з.п. ф-лы, 3 ил.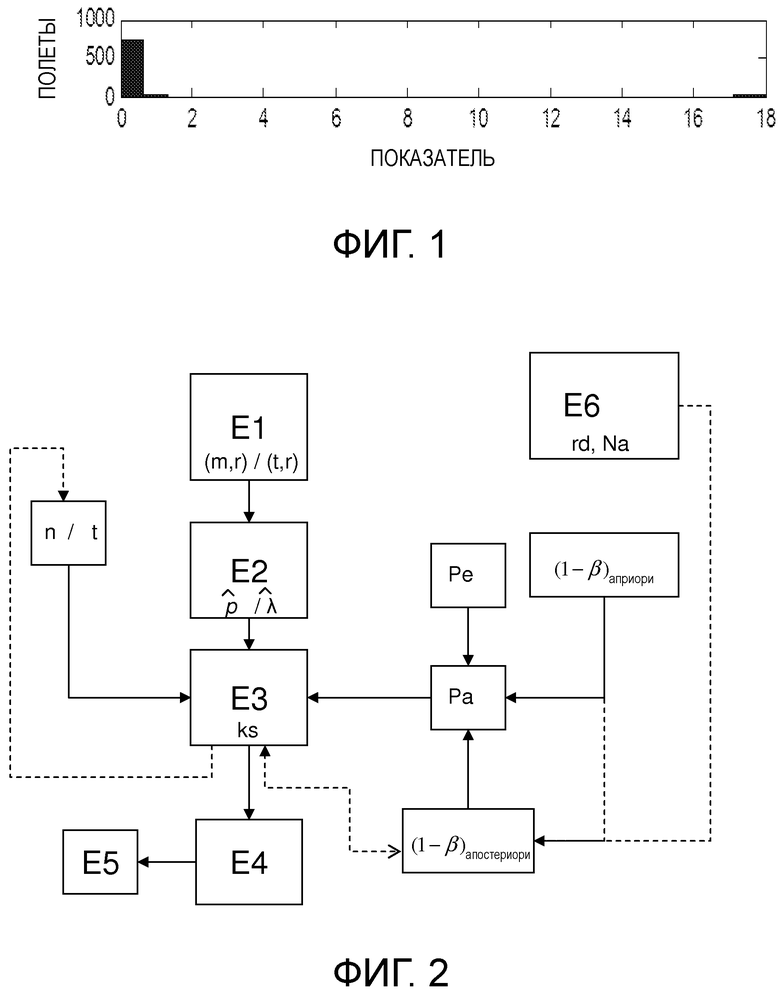
1. Способ мониторинга деградации бортового устройства летательного аппарата во время его работы, осуществляемый вычислительным устройством, при этом степень деградации бортового устройства определяют по показателю дефектности, сформированному путем подсчета возникновений дефектов, отмечаемых системой контроля устройства в ходе его работы, при этом способ мониторинга содержит этап сравнения полученного показателя дефектности для последовательности наблюдения данной длины (n,t) с порогом (ks) принятия решения и этап передачи тревожного сигнала в случае достижения или превышения порога (ks) принятия решения, при этом порог (ks) принятия решения определяют автоматически для данной вероятности тревожного сигнала Ра, соответствующей вероятности, что тревожный сигнал передан в ходе способа мониторинга, тогда как бортовое устройство является исправным, путем осуществления следующих этапов:
- этап получения показателя дефектности (r) по меньшей мере за одну контрольную последовательность, соответствующую полетам летательного аппарата без деградации, и длиной (m,tc), равной множеству длин (n,t) последовательностей наблюдения;
- этап коррекции правила дискретной вероятности, позволяющий найти показатель дефектности (r), полученный на контрольной последовательности;
- этап вычисления порога (ks) принятия решения таким образом, чтобы при применении правила дискретной вероятности, скорректированного на предыдущем этапе, к последовательности наблюдения, имеющей данную длину (n), вероятность того, что показатель дефектности, превышающий или равный порогу (ks) принятия решения, получается количество S раз за N следующих одна за другой последовательностей, была меньше элементарной вероятности Реас превышения порога, оцененной на основании данной вероятности тревожного сигнала Ра, при этом N и S могут быть равными одному, при этом
элементарную вероятность Реас превышения порога, оцененную на основании данной вероятности тревожного сигнала Ра, задают при помощи формулы
Реас= (Pa),
(Pa),
в которой N является числом последовательностей наблюдения, S является количеством раз, когда порог ks превышен за N следующих одна за другой последовательностей, и является эйлеровой функцией бета-распределения, обратной параметрам S и N-S+1.
2. Способ по п. 1, отличающийся тем, что правило дискретной вероятности отображает явление, возникновения которого имеют вероятность (р,λ) за единицу времени, при этом второй этап соответствует оценке ( ,
, ) вероятности (р,λ) за единицу времени в правиле дискретной вероятности для достижения показателя дефектности (r), полученного за контрольную последовательность.
) вероятности (р,λ) за единицу времени в правиле дискретной вероятности для достижения показателя дефектности (r), полученного за контрольную последовательность.
3. Способ по п. 2, в котором правило дискретной вероятности является биномиальным правилом или правилом Пуассона, параметрированным по вероятности за единицу времени и по длине последовательности.
4. Способ по одному из пп. 2, 3, в котором оценка (,) вероятности (р,λ) за единицу времени возникновений дефектов для системы без деградации в правиле дискретной вероятности равна мажоранте этой вероятности за единицу времени с данной достоверностью (α) для показателя дефектности (r) в контрольной последовательности.
5. Способ по одному из пп. 2, 3, в котором оценка (,) вероятности (р,λ) за единицу времени возникновений дефектов для системы без деградации равна максимуму правдоподобия вероятности (р,λ) за единицу времени, соответствующему показателю дефектности, полученному за контрольную последовательность.
6. Способ по одному из пп. 1-5, в котором длину (n,t) последовательности наблюдения определяют в виде количества (n) инкрементов наблюдения единой продолжительности.
7. Способ по одному из пп. 1-6, в котором последовательность наблюдения соответствует нескольким следующим один за другим полетам летательного аппарата.
8. Способ по одному из пп. 1-7, содержащий этап предварительного определения длины (n,t) последовательности наблюдения.
9. Способ по одному из пп. 1-8, в котором вероятность тревожного сигнала Ра получают при помощи следующей формулы:
 ,
,
в которой
Ре соответствует вероятности того, что бортовое устройство является исправным, тогда как передан тревожный сигнал;
Pd соответствует вероятности деградации для данной последовательности наблюдения; и
(1-β)априори соответствует вероятности априорного обнаружения деградации.
10. Способ по п. 9, содержащий:
- этап осуществления способа мониторинга деградации бортового устройства с предварительно определенным порогом (ks) принятия решения для множества показателей дефектности, сформированных для множества последовательностей наблюдения с деградацией, чтобы на этом основании получить вероятность апостериорного обнаружения деградации (1-β)апостериори,
- этап определения новой вероятности тревожного сигнала Ра в зависимости от вероятности апостериорного обнаружения деградации (1-β)апостериори,
- этап определения нового уточненного порога (ks) принятия решения на основании новой вероятности тревожного сигнала.
| RU 2052847 C1, 20.01.1996 | |||
| СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ЭКИПАЖА ВОЗДУШНОГО СУДНА ПО ПРЕДОТВРАЩЕНИЮ ОСОБЫХ СИТУАЦИЙ | 2008 |
|
RU2386569C2 |
| КОМПЛЕКС ДЛЯ ПРОВЕРКИ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2205441C1 |
| WO 2013171427 A1, 21.11.2013 | |||
| US 8700550 B1, 15.04.2014. | |||

