ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ, И УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к области контроля износа бортового устройства летательного аппарата, такого как, например, система смазки турбореактивного двигателя, дозатор подачи топлива турбореактивного двигателя, система сбора данных турбореактивного двигателя с резервированием, фильтр твердых частиц и т.д.
Для контроля бортового устройства, как известно, создают индикатор, который является указателем износа бортового устройства. Этот индикатор известен специалистам в данной области техники под названием показателя анормальности. Обычно показатель анормальности формируется на основании измерений физических параметров бортового устройства, таких как, например, геометрическое положение, ток управления, угол открытия, температура, и т.д. Показатель анормальности является показателем степени ущерба от износа. Предпочтительно, показатель анормальности формируется при каждом полете летательного аппарата.
Для примера, известен, из патентной заявки, поданной во Франции 5 декабря 2011 г., под номером 1161175 от SNECMA, способ контроля дозатора подачи топлива турбореактивного двигателя, в котором контролируется износ относительно смещения тока покоя сервоклапана, управляющего дозатором подачи топлива. Для формирования показателя анормальности, который характерен для смещения тока покоя сервоклапана, выполняют множество измерений среднего тока управления и из них определяют норму.
Чтобы определить, действительно ли бортовое устройство изношено, способ контроля включает этап сравнения показателя анормальности, полученного для данного полета летательного аппарата с порогом принятия решения, и этап передачи сигнала тревоги в случае превышения порога принятия решения. Таким образом, следя за изменением показателя анормальности, обнаруживают, увеличивается ли уровень износа, и могут предвидеть риск выхода из строя бортового устройства и улучшить управление операциями технического обслуживания.
Регулировка порога принятия решения для данного износа имеет решающее значение, так как, с одной стороны, слишком низкий порог принятия решения вызывает частую передачу сигнала тревоги, в то время как износ не подтвержден (ложный сигнал тревоги), и, с другой стороны, слишком высокий порог принятия решения задерживает передачу сигналов тревоги, в то время как износ подтвержден (отсутствие обнаружения).
Обычно, для каждого износа, который желают обнаружить, эмпирически определяют значение порога принятия решения. Для обеспечения максимальной безопасности значение порога принятия решения, как правило, занижается, чтобы минимизировать риск отсутствия обнаружения. В результате, количество ложных тревог остается высоким, что является недостатком для авиакомпаний, вынужденных часто осуществлять техническое обслуживание, в то время как бортовое авиационное устройство не изношено. Для устранения этого недостатка авиакомпании ставят перед изготовителями бортовых устройств техническое задание, призванное ограничить риск ошибки. И поэтому, учитывая необходимую точность, любое эмпирическое определение порога принятия решения для способа контроля отказов запрещено.
Существует, таким образом, необходимость надежно и точно определить значение порога принятия решения для контроля износа бортового устройства летательного аппарата.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к способу контроля износа бортового устройства летательного аппарата, осуществляемому вычислительным устройством, уровень износа бортового устройства определяется с помощью показателя анормальности, формируемого на основании измерений физических параметров бортового устройства, способ контроля включает в себя этап сравнения показателя анормальности, полученного для данного полета летательного аппарата, с порогом принятия решения и этап передачи сигнала тревоги в случае превышения порога принятия решения, причем порог принятия решения определяют автоматически для данной вероятности сигнала тревоги Pa, соответствующей вероятности того, что сигнал тревоги будет передан во время способа контроля, несмотря на то, что бортовое устройство исправно, посредством следующих этапов:
этап вычисления множества показателей анормальности для множества полетов летательного аппарата без износа так, чтобы получить плотность распределения вероятности показателя анормальности, причем плотность распределения присуща физическому свойству бортового устройства;
этап сглаживания плотности распределения вероятности, по непараметрической оценке, с тем, чтобы получить сглаженную непрерывную функцию плотности распределения;
этап вычисления сглаженной непрерывной функции распределения на основании сглаженной непрерывной функции плотности распределения; и
этап чтения предшествующего члена непрерывной сглаженной функции распределения для значения 1-Pa, при этом предшествующий член соответствует порогу принятия решения.
Благодаря изобретению, порог принятия решения определяется автоматически с высокой точностью в соответствии с вероятностью сигнала тревоги Pa, соответствующей требованиям авиакомпаний. Такой способ является надежным по сравнению с известными способами, что позволяет точно обнаружить любой износ бортового устройства и предупредить любой отказ последнего в ходе контроля.
Предпочтительно, непараметрическая оценка плотности вероятности - это оценка с помощью окна Парзена. Такая оценка является очень выгодной, поскольку придает равное значение как центральной части плотности распределения, так и крайним частям, которые являются наиболее важными для контроля износа в авиационной области, для которой требования в плане надежности имеют важное значение.
Предпочтительно, оценка с помощью окна Парзена определяется шириной окна h. Предпочтительно, плотность распределения формируют из числа N показателей анормальности для множества полетов летательного аппарата без износа, плотность распределения имеет расчетное типовое отклонение, окно Парзена имеет ширину h, определяемую в соответствии со следующей формулой:
Такая ширина h окна Парзена позволяет гарантировать точность сглаживания для контроля бортового устройства, что гарантирует точность определяемого порога принятия решения.
Согласно предпочтительному аспекту изобретения, вероятность сигнала тревоги Pa получают по следующей формуле:

в которой:
Pe соответствует вероятности, что бортовое устройство исправно тогда, как передан сигнал тревоги;
Pd соответствует вероятности износа для данного полета; и
 соответствует априорной вероятности обнаружения износа.
соответствует априорной вероятности обнаружения износа.
Преимущественно, вероятность сигнала тревоги Pa определяют на основе вероятности Ре ошибки, которая соответствует практическим требованиям авиакомпаний, которые желают уменьшить количество ненужных этапов технического обслуживания бортовых устройств.
Преимущественно, способ включает в себя еще:
- этап реализации способа контроля износа бортового устройства, с предварительно определенным порогом принятия решения, для множества показателей анормальности, сформированных для множества полетов летательного аппарата с износом для выведения апостериорной вероятности обнаружения износа  ,
,
- этап определения новой вероятности сигнала тревоги Pa в зависимости от апостериорной вероятности обнаружения износа , и
- этап определения нового уточненного порога принятия решения, исходя из новой вероятности сигнала тревоги Pa.
Эти этапы преимущественно позволяют уточнить значение порога принятия решения быстро и надежно, когда сигнал вероятности сигнала тревоги Pa определен в соответствии с вероятностью ошибки Ре.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет лучше понято после прочтения описания, которое следует далее, приведенного исключительно в качестве примера, и ссылается на прилагаемые чертежи, на которых:
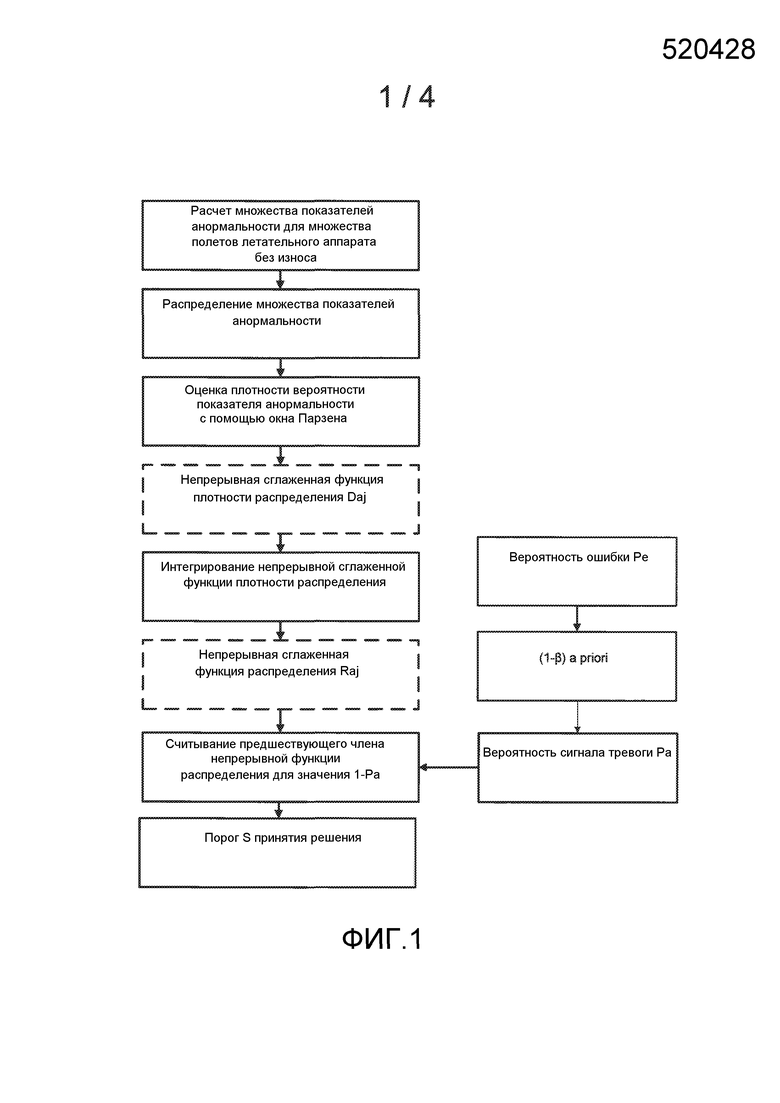
Фиг. 1 представляет собой схему этапов автоматического определения порога принятия решения, в соответствии с изобретением;
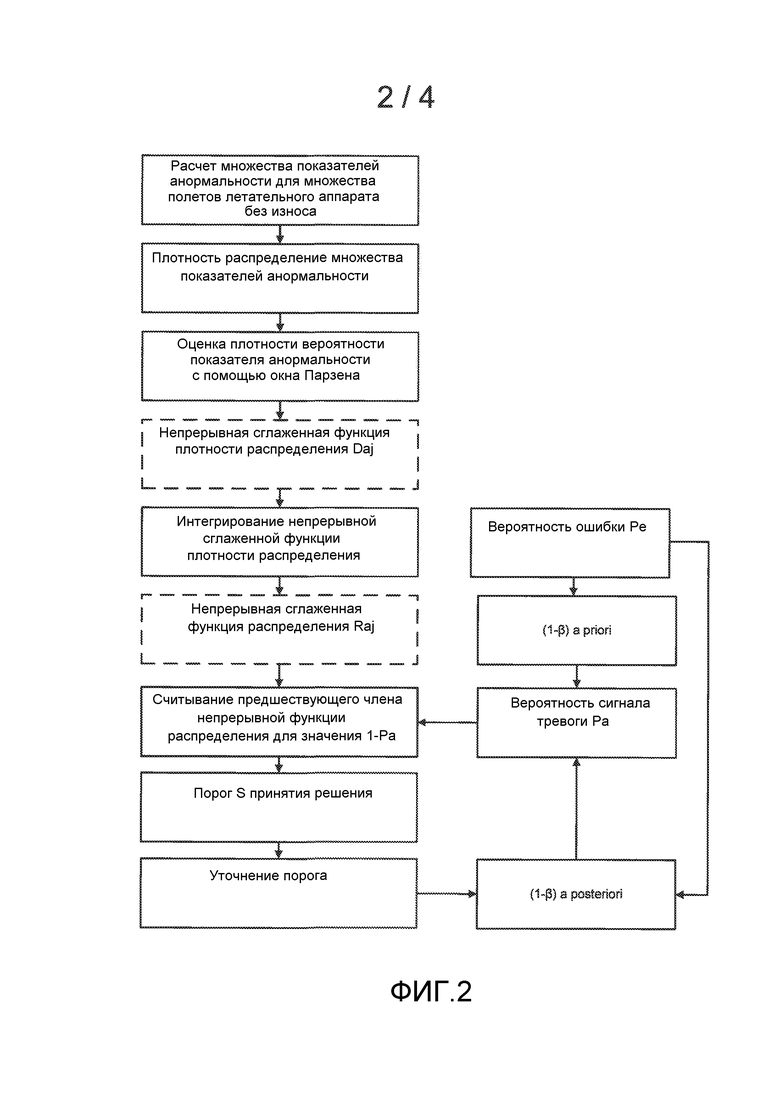
Фиг. 2 представляет собой схему этапов для автоматического определения порога принятия решения, в соответствии с изобретением, с этапом уточнения порога принятия решения;
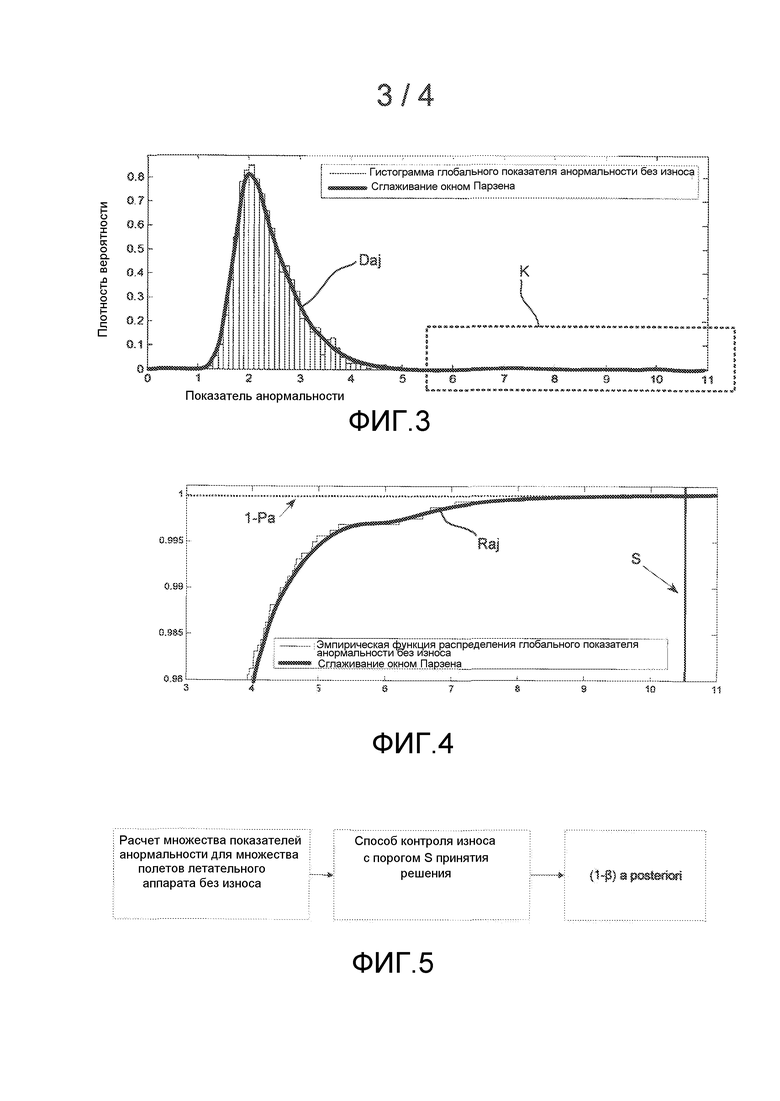
Фиг. 3 показывает плотность распределения показателей анормальности, полученных для бортового вычислительного устройства летательного аппарата для множества полетов без износа, кривая представляет сглаживание полученной плотности распределения;
Фиг. 4 показывает функцию распределения в результате плотности распределения фиг. 3, кривая представляет сглаживание функции распределения;
Фиг. 5 представляет собой схему этапа уточнения значения порога принятия решения;
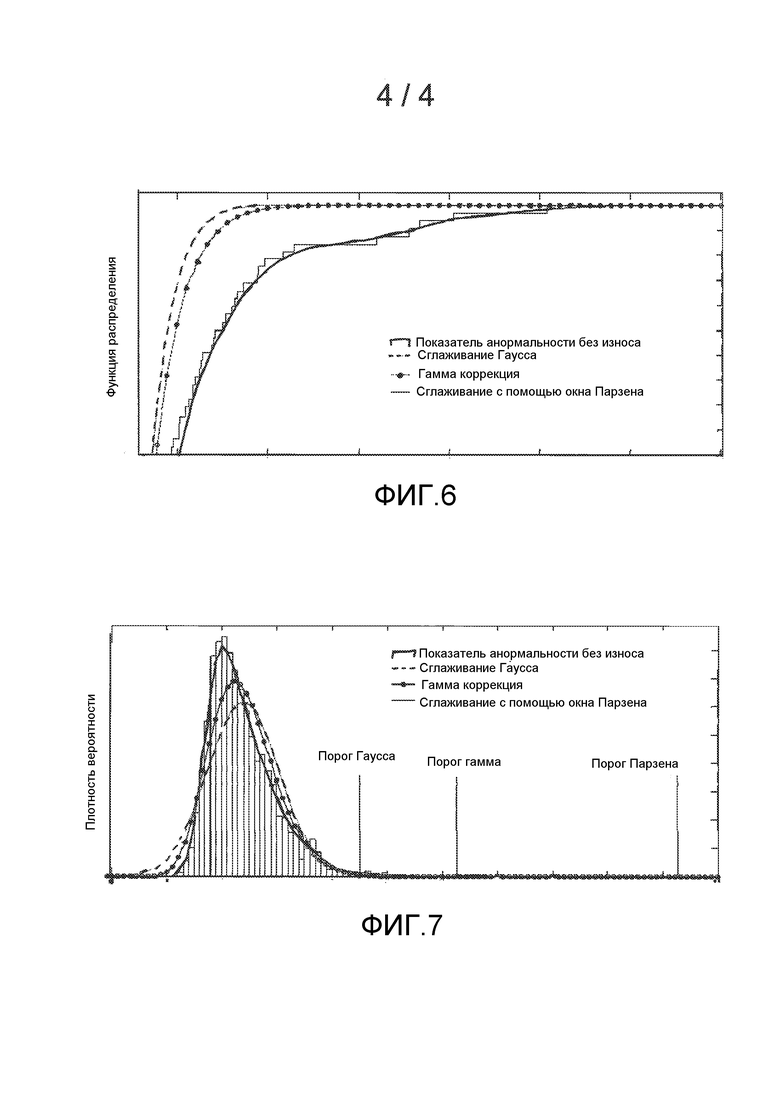
Фиг. 6 представляет собой сравнение различных типов сглаживания (Гаусса, гамма, Парзена) функции распределения; и
Фиг. 7 представляет собой сравнение различных порогов принятия решения, полученных в зависимости от типа сглаживания.
Следует отметить, что чертежи обрисовывают изобретение подробно для реализации изобретения, указанные чертежи, конечно, могут быть использованы для более четкого определения изобретения в случае необходимости.
ОПИСАНИЕ ОДНОГО ИЛИ НЕСКОЛЬКИХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ И РЕАЛИЗАЦИИ
Автоматическое определение порога принятия решения будет продемонстрировано для способа контроля износа бортового устройства летательного аппарата, известного из предыдущего уровня техники, к примеру, из патентной заявки под номером 1161175 от SNECMA.
Известным образом, степень износа бортового устройства определяется показателем анормальности, полученным расчетным путем с помощью измерений физических параметров бортового устройства, такого как представлено выше. Предпочтительно, показатель анормальности формируется посредством бортового вычислительного устройства летательного аппарата, связанного с бортовым устройством с помощью линии связи. Как известно, как показано выше, способ контроля включает в себя этап сравнения показателя анормальности, полученного для данного полета летательного аппарата с порогом принятия решения, и этап передачи сигнала тревоги в случае превышения порога принятия решения.
При передаче сигнала тревоги этап технического обслуживания бортового устройства должен быть осуществлен авиакомпанией, чтобы избежать отказа указанного бортового устройства.
Вероятность сигнала тревоги
Автоматическая регулировка порога принятия решения определяется как данная вероятность сигнала тревоги Pa. Под вероятностью сигнала тревоги понимают вероятность того, что сигнал тревоги передан во время способа контроля, тогда как бортовое устройство исправно, другими словами, без доказанного износа. Другими словами, вероятность сигнала тревоги Pa в 1% соответствует выдаче сигнала тревоги для 100 полетов без износа.
На практике вероятность сигнала тревоги Pa непосредственно не известна. В самом деле, техническое задание авиакомпаний применяет в качестве критерия вероятность ошибки Ре, которая является вероятностью того, что бортовое устройство исправно в то время, как сигнал тревоги передается. Другими словами, вероятность Ре ошибки в 1% соответствует исправному бортовому устройству для 100 переданных сигналов тревоги.
На практике когда сигнал тревоги передается при выполнении способа контроля, техническое обслуживание осуществляется авиакомпанией. Ограничение вероятности ошибки Ре позволяет авиакомпаниям ограничить число операций технического обслуживания бортового устройства, которое исправно, такие операции порождают лишние эксплуатационные расходы.
Предпочтительно, вероятность сигнала тревоги Pa определяется на основании вероятности ошибки Ре с помощью формулы (F1) условной вероятности, которая ниже.

Формула (F1) содержит следующие параметры:
- β соответствует вероятности отсутствия обнаружения износа для данного полета, 1-β соответствует вероятности обнаружения износа; и
- Pd является вероятностью износа для данного полета.
Формула (F1) выводится из уравнений условной вероятности, в которых вероятность Pa соответствует сигналу тревоги, зная, что устройство исправно (Ра=P(Сигнал тревоги|Исправен)), и вероятность Pe соответствует исправному устройству, зная, что сигнал тревоги передан (Ре=P(Исправен|Сигнал тревоги)).

Другими словами

(прим. Sain-> Исправно, Alarme-> Сигнал тревоги)
Кроме того, так как

(Degrade-> Изношено),
где
Р(Изношено)=Pd
P(Исправно)=1-Pd
P(Сигнал тревоги/Изношено)=1-β
P(Сигнал тревоги/Исправно)=Pa
P(Исправно/Сигнал тревоги)=Pe
P(Сигнал тревоги) = P(Сигнал тревоги/Исправно).P(Исправно)+P(Сигнал тревоги/Изношено).Р(Изношено)
P(Сигнал тревоги)=Pa⋅(1-Pd)+(1-β)⋅Pd
P(Сигнал тревоги)=Pa⋅(1-Pd)+(1-β)⋅Pd.
С помощью двух равенств, связанных с Р (Сигнал тревоги), выводят (F1).
В формуле (F1) вероятность износа для данного полета Pd известна из опытного пути или расчета, и может, например, быть порядка 10-7. Вероятность обнаружения износа фиксируется «априорно» на 1 и корректируется итеративно, как будет подробно описано позже, чтобы улучшить точность порога принятия решения.
В качестве примера, обычно получают вероятность сигнала тревоги Pa порядка 10E-9 для требуемой вероятности Pe ошибки порядка 1%, вероятности обнаружения износа порядка 1 и вероятности Pd износа за полет порядка 10-7.
Показатель анормальности, плотность распределения и функция распределения
Бортовое устройство летательного аппарата обычно включает в себя множество датчиков для измерения физических параметров бортового устройства (управляющего тока, геометрического расположения, температуры, и т.д.). Обычно некоторые из измеренных физических параметров используются для формирования показателя анормальности, который зависит от степени износа бортового устройства (ошибки позиционирования, отклонение управляющего тока, перегрев, и т.д.). Показатель анормальности получается путем преобразования одного или нескольких измерений физических параметров бортового устройства. Например, полученные измерения нормированы по абсолютной величине или по норме Махаланобиса.
Как показано на фиг. 1, способ согласно изобретению, включает в себя этап вычисления множества показателей анормальности для множества полетов летательного аппарата без износа. Для полетов летательного аппарата, в которых бортовое устройство является исправным, рассчитывают множество показателей анормальности, обычно на основании измерений физических параметров бортового устройства, реализованных во время каждого полета летательного аппарата. Значения показателей анормальности меняются в зависимости от полетов летательного аппарата и физического свойства бортового устройства.
Плотность распределения вероятности показателя анормальности показана на фиг. 3 с помощью гистограммы. Как показано на этом условном изображении, показатель анормальности, равный 2, наиболее вероятен (плотность вероятности 0,8). Чем выше количество показателей анормальности, тем точнее плотность распределения. К сожалению, большое количество показателей анормальности требует большого количества полетов летательного аппарата, что не желательно. В этом примере показатели анормальности были получены при количестве полетов от 200 до 500.
Вероятность сигнала тревоги Pa, которая, напомним, соответствует вероятности, что сигнал тревоги передан в процессе способа контроля, в то время как бортовое устройство исправно, обычно имеет порядок 10E-9. Другими словами, порог S принятия решения, соответствующий вероятности сигнала тревоги Pa, является величиной показателя анормальности, выше которого находятся 10E-9 показатели анормальности, полученные для полетов без износа.
Даже если имеется очень большое количество показателей анормальности, плотность распределения фиг. 3 не является точной для величин низкого значения, например для величины 10Е-9. С помощью графического анализа можно только заключить, что значение порога S принятия решения больше чем 5,5, и должно быть расположено в окне K, показанном на фиг. 3. В самом деле, плотность распределения получается с помощью дискретных значений показателей анормальности, что ограничивает точность плотности распределения.
Сглаживание функции плотности распределения
Для того чтобы улучшить интерпретацию плотности распределения, со ссылкой на фиг. 1, способ, согласно изобретению, включает в себя этап сглаживания плотности распределения посредством оценки плотности вероятности для получения сглаженной непрерывной функции Daj плотности распределения, показанной на фиг. 3. В соответствии с изобретением, на этапе сглаживания функции плотности распределения с помощью окна Парзена позволяет точно аппроксимировать функцию распределения, полученную дискретно.
Этот непараметрический подход позволяет получить близкое сглаживание плотности распределения, так как сглаживание окном Парзена дает преимущественно тот же вес окончаниям плотности распределения, что и центральной части, что позволяет точно интерпретировать крайние величины.
Напомним, сглаживание с помощью окна Парзена является непараметрическим сглаживанием для оценки плотности вероятности случайной величины. Он широко известен как оценка с помощью ядра плотности, потому что функции, называемые «ядерными», используются для оценки плотности вероятности случайной величины. Аналитическое выражение для плотности вероятности Парзена:
Где K и h, соответственно, ядерная функция и ширина или глубина окна Парзена.
Концепция сглаживания с помощью окна Парзена – оценка плотности вероятности случайной величины для каждого значения x, с помощью ядерной функции K(), которая обычно является функцией плотности вероятности. Чем наблюдение x ближе к обучающим образцам xi, тем вклад x в ядерной функции  , центрированной на xi, важнее. И наоборот, чем дальше наблюдение х к обучающим образцам xi, тем незначительнее вклад x в ядерной функции , центрированной на xi. Затем, оценка функции плотности вероятности формируется путем усреднения значений ядерной функции. Эта оценка определяется с помощью параметра сглаживания «h», который называется шириной или глубиной окна. Оценка плотности вероятности, которая зависит от параметра сглаживания «h», имеет хорошие статистические свойства. При определенных необязательных условиях по «h» оценка окна Парзена является последовательной.
, центрированной на xi, важнее. И наоборот, чем дальше наблюдение х к обучающим образцам xi, тем незначительнее вклад x в ядерной функции , центрированной на xi. Затем, оценка функции плотности вероятности формируется путем усреднения значений ядерной функции. Эта оценка определяется с помощью параметра сглаживания «h», который называется шириной или глубиной окна. Оценка плотности вероятности, которая зависит от параметра сглаживания «h», имеет хорошие статистические свойства. При определенных необязательных условиях по «h» оценка окна Парзена является последовательной.
Есть несколько ядерных функций (Гауссова, ящик, треугольная …), но производительность окна Парзена в основном базируется на выборе ширины или глубины окна «h». Должен быть принят компромисс между смещением и дисперсией оценки, для выбора ширины «h».
Ширина окна может быть выбрана с помощью перекрестной проверки, путем максимизации вероятности ядерной функции. В этом примере было использовано ядро Гаусса(F2). Что касается ширины или глубины окна, она основана на оценке типового отклонения  и размера N набора обучающих данных по формуле (F3).
и размера N набора обучающих данных по формуле (F3).
Сглаживание Парзена очень близко к элементарному распределению, наблюдаемому для нескольких полетов, что будет показано далее, что делает сглаживание оптимальным по сравнению с другими известными сглаживаниями.
В отличие от дискретной плотности распределения, полученного ранее, сглаженная функция Daj плотности распределения является непрерывной, что позволяет достоверно узнать плотность вероятности показателя анормальности для какого-либо показателя анормальности. Это очень выгодно для величин низкого значения, для которых собранные данные очень немногочисленны.
Сглаженная функция распределения
Чтобы определить значение порога S принятия решения быстро и легко, сглаженная функция плотности распределения Daj обычно интегрируется для получения сглаженной функции распределения Raj, которая также непрерывна.
Сглаженная функция распределения Raj из сглаженной функции плотности распределения Daj с фиг. 3 представлена на фиг. 4. Напомним, что функция распределения F реальной случайной величины X является функцией Fx для любых вещественных Х, ассоциированных Fx(х)=P(X≤х). Ссылаясь на фиг.4, функция распределения имеет значение 99% для показателя анормальности 4,5. Это означает, что 99% показателей анормальности для исправного устройства ниже чем 4,5.
Также, чтобы соответствовать критерию вероятности сигнала тревоги Pa порядка 10Е-9, нужно точно читать предшествующий член сглаженной функции Raj распределения, для которой последний равен 1-Pa, предшествующий член соответствует искомому порогу принятия решения. По сути, это означает, что 1-10E-9 показателей анормальности для исправного устройства ниже порога S принятия решения. Другими словами, 10Е-9 показателей анормальности для исправного устройства, которые могут вызвать сигнал тревоги, являются выше порога S принятия решения. Предшествующий член соответствует искомому порогу S принятия решения для определенной вероятности сигнала тревоги Pa.
Определение порога принятия решения
Ссылаясь на фиг. 1, способ, согласно изобретению, включает в себя этап считывания предшествующего члена сглаженной функции Raj распределения для значения 1-Pa. Предпочтительно, сглаженная функция Raj распределения является непрерывной и взаимно однозначной, можно очень точно определить для какого предшествующего члена сглаженная функция Raj распределения принимает значение 1-Pa, то есть порог S принятия решения, который здесь равен 10,5, как показано на фиг. 3.
Для примера, на фиг. 6 показано сравнение нескольких типов сглаживаний функции распределения (сглаживание Гаусса, гамма-коррекция и сглаживание Парзена). Как показано на фиг. 6, сглаживание по методу Парзена очень близко к величинам показателя анормальности, полученным для нескольких полетов. Обычно, для того чтобы подтвердить качество сглаживания, используют тест релевантности сглаживания, известный специалистам в данной области, под названием теста «Колмогорова-Смирнова». В настоящем случае, только сглаживание Парзена проходит тест Колмогорова-Смирнова, другие сглаживания отклоняются.
Эта точность сглаживания с помощью окна Парзена выражается в точности определения порога принятия решения. В самом деле, как показано на фиг. 7, получается порог принятия решения 6,5 со сглаживанием Гаусса, порог принятия решения 8,2 с помощью гамма-коррекции и порог принятия решения 10,5 со сглаживанием с помощью окна Парзена.
Уточнение значения порога принятия решения
Ранее было показано определение порога принятия решения, в котором вероятность сигнала тревоги Pa известна или оценена по вероятности ошибки Pe. Когда вероятность сигнала тревоги Pa оценена, можно опционально реализовать этап уточнения порога S принятия решения с помощью уточнения вероятности (1-β) обнаружения износа, как показано на схемах фиг. 2 и 5.
Как показано на фиг. 2, реализуют способ контроля с порогом S принятия решения, таким как определен ранее для множества показателей анормальности, полученных при полетах с износом, предпочтительно, полученных путем моделирования. В процессе способа контроля различные показатели анормальности сравниваются с порогом S принятия решения, что позволяет вывести «апостериорно» вероятность (1-β) обнаружения износа. В самом деле, достаточно наблюдать количество переданных сигналов тревоги относительно количества полетов с контролируемым износом.
Как показано на фиг. 2, итеративно заменяют на этапах определения порога принятия решения значение  значением , полученным в ходе уточнения, чтобы получить новое значение более точного порога S принятия решения. Этап уточнения может быть повторен для того, чтобы свести значение порога S принятия решения к более точному значению.
значением , полученным в ходе уточнения, чтобы получить новое значение более точного порога S принятия решения. Этап уточнения может быть повторен для того, чтобы свести значение порога S принятия решения к более точному значению.
В одном из вариантов осуществления настоящего изобретения, способ контроля износа бортового устройства летательного аппарата, метод автоматического определения порога принятия решения и способ генерации износа реализованы вычислительным устройством, предпочтительно, посредством множества вычислительных устройств.
Например, способ контроля реализован для контроля дозатора топлива турбореактивного двигателя летательного аппарата.
Процессор для определения порога принятия решения принимает множество показателей анормальности без износа от процессора контроля и определяет, для данной вероятности ошибки Pe и вероятности обнаружения «априорно» износа с помощью способа контроля, порог S принятия решения. Как только порог S принятия решения определен, он передается в процессор контроля, который может затем сравнить показатели анормальности, рассчитанные указанным порогом S принятия решения для контроля изменения износа дозатора топлива по мере полетов летательного аппарата.
Для уточнения значения порога S принятия решения процессор генерации износа имитирует данные износа в полетах, которые передаются в процессор контроля, который передает некоторое количество сигналов тревог в соответствии с полученными данными, что позволяет определить «апостериорно» вероятность обнаружения износа с помощью способа контроля. Это значение затем передается процессору определения порога S принятия решения, который обеспечивает новое значение порога S принятия решения для полученной новой вероятности обнаружения.
Процесс повторяется до тех пор, пока не достигнута сходимость значения порога S принятия решения. На практике удовлетворительная сходимость достигается по итогам двух итераций.
Изобретение было представлено для дозатора топлива, но оно применимо к любому бортовому устройству летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА ДЕГРАДАЦИИ БОРТОВОГО УСТРОЙСТВА ЛЕТАТЕЛЬНОГО АППАРАТА, ВКЛЮЧАЮЩИЙ В СЕБЯ ОПРЕДЕЛЕНИЕ ПОРОГА ПОДСЧЕТА | 2015 |
|
RU2677757C2 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2385469C1 |
| БОРТОВАЯ СИСТЕМА СОДЕЙСТВИЯ ПИЛОТИРОВАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА, ОСНОВАННАЯ НА СИСТЕМЕ GNSS, ИМЕЮЩАЯ ИЗБЫТОЧНУЮ И НЕСХОДНУЮ АРХИТЕКТУРУ ДЛЯ ПОВЫШЕННОГО УРОВНЯ ДОСТОВЕРНОСТИ | 2013 |
|
RU2621827C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2443991C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2545150C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2502058C1 |
| Способ мониторинга технического состояния планера и шасси летательного аппарата и устройство для его осуществления | 2017 |
|
RU2678540C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2549601C1 |
| СПОСОБ КОНТРОЛЯ КЛАПАНА АВИАЦИОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2654807C2 |
| КОНТРОЛЬ АВИАЦИОННОГО ДВИГАТЕЛЯ, ПРЕДВАРЯЮЩИЙ ОПЕРАЦИИ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ | 2014 |
|
RU2664126C2 |
Изобретение относится к способу контроля износа бортового устройства летательного аппарата. Для контроля износа сравнивают показатель анормальности, формируемый на основании измерений физических параметров бортового устройства, с порогом принятия решения и передают сигнал тревоги при его превышении, при этом вычисляют множество показателей анормальности для множества полетов летательного аппарата для получения плотности распределения вероятности показателя анормальности, сглаживают плотность распределения вероятности для получения сглаженной непрерывной функции плотности распределения, на основании которой вычисляют сглаженную непрерывную функцию распределения, считывают предшествующий член непрерывной сглаженной функции для значения 1-Pa, который соответствует порогу принятия решения. Обеспечивается надежность и точность определения порога принятия решения для контроля износа бортового устройства летательного аппарата. 4 з.п. ф-лы, 7 ил.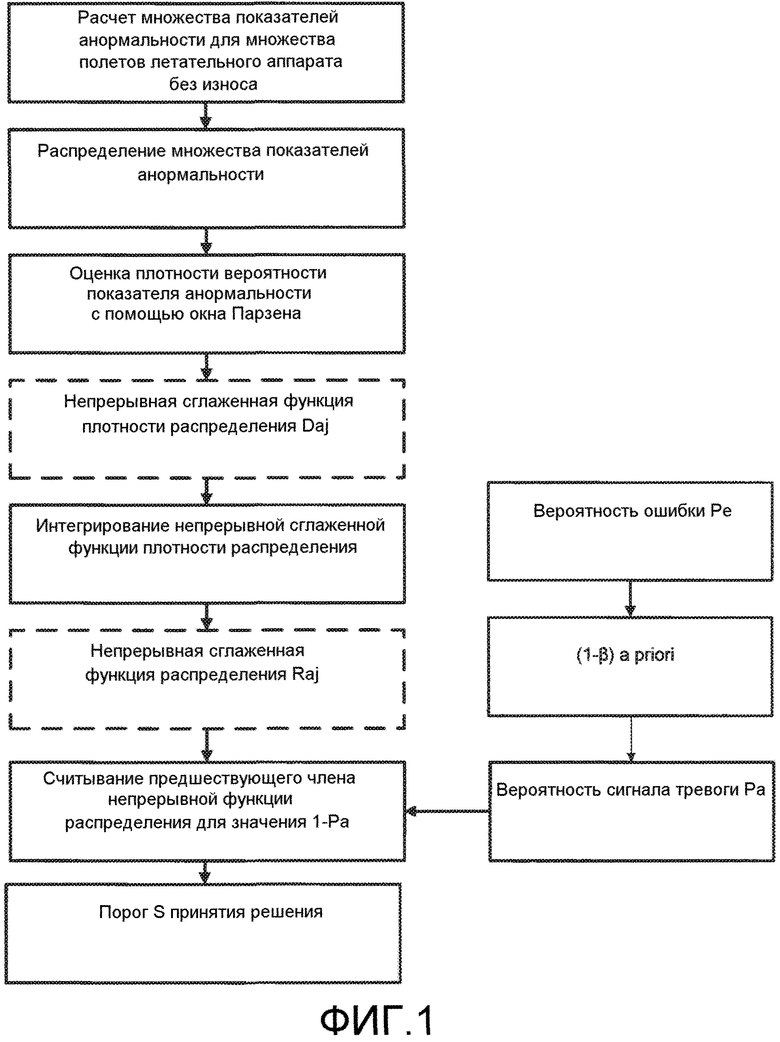
1. Способ контроля износа бортового устройства летательного аппарата, осуществляемый вычислительным устройством, степень износа бортового устройства определяют с помощью показателя анормальности, формируемого на основании измерений физических параметров бортового устройства, способ контроля включает в себя этап сравнения показателя анормальности, полученного для данного полета летательного аппарата, с порогом (S) принятия решения и этап передачи сигнала тревоги в случае превышения порога (S) принятия решения, причем порог (S) принятия решения определяют автоматически для данной вероятности сигнала тревоги Ра, соответствующей вероятности того, что сигнал тревоги передан в процессе способа контроля, несмотря на то что бортовое устройство исправно, посредством следующих этапов:
этап вычисления множества показателей анормальности для множества полетов летательного аппарата без износа так, чтобы получить плотность распределения вероятности показателя анормальности, причем плотность распределения присуща физическому свойству бортового устройства; этап сглаживания плотности распределения вероятности, по непараметрической оценке, с тем чтобы получить сглаженную непрерывную функцию плотности распределения;
этап вычисления сглаженной непрерывной функции распределения на основании сглаженной непрерывной функции плотности распределения; и
этап считывания предшествующего члена непрерывной сглаженной функции распределения для значения 1-Ра, при этом предшествующий член соответствует порогу (S) принятия решения.
2. Способ по п. 1, в котором непараметрическая оценка плотности вероятности является оценкой с помощью окна Парзена.
3. Способ по п. 2, в котором плотность распределения формируют на основании числа N показателей анормальности для множества полетов летательного аппарата без износа, плотность распределения имеет расчетное типовое отклонение  , окно Парзена имеет ширину h, определяемую в соответствии со следующей формулой:
, окно Парзена имеет ширину h, определяемую в соответствии со следующей формулой:
4. Способ по п. 1, в котором вероятность сигнала тревоги Ра получают с помощью следующей формулы:

в которой:
Ре соответствует вероятности, что бортовое устройство исправно, тогда как передан сигнал тревоги;
Pd соответствует вероятности износа для данного полета; и
(1-β)a priori соответствует априорной вероятности обнаружения износа.
5. Способ по п. 4, включающий в себя:
этап реализации способа контроля износа бортового устройства, с предварительно определенным порогом (S) принятия решения, для множества показателей анормальности, сформированных для множества полетов летательного аппарата с износом для выведения апостериорной вероятности обнаружения износа (1-β)а posteriori,
этап определения новой вероятности сигнала тревоги Ра в зависимости от апостериорной вероятности обнаружения износа (1_β)а posteriori, и
этап определения нового уточненного порога (S) принятия решения, исходя из новой вероятности сигнала тревоги Pa.
| СИСТЕМА ИНТЕГРИРОВАННОГО КОНТРОЛЯ РАБОТЫ БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2431175C1 |
| СПОСОБ ИНТЕГРИРОВАННОЙ ЛОГИСТИЧЕСКОЙ ПОДДЕРЖКИ ЭКСПЛУАТАЦИОННОГО КОНТРОЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2005 |
|
RU2308069C2 |
| Отстойник | 1989 |
|
SU1677172A1 |
| US 5455777 A, 03.10.1995 | |||
| US 2005143873 A1, 30.06.2005. | |||

