ОБЛАСТЬ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к созданию способа формирования описания плановой схемы поведения воздушного судна, выраженного с использованием формализованного языка. Такое описание обеспечивает возможность однозначного прогнозирования пути воздушного судна.
УРОВЕНЬ ТЕХНИКИ
Возможность прогнозирования траектории воздушного судна является полезной по некоторым причинам. Под траекторией подразумевается четырехмерное описание пути воздушного судна, например трехмерное положение воздушного судна может быть точно определено в каждой из совокупностей отсчетов времени. Описание может представлять собой развитие состояния воздушного судна со временем, причем указанное состояние может содержать положение центра масс воздушного судна и другие аспекты его перемещения, такие как скорость, пространственное положение и вес.
Управление воздушным движением (ATM) стало бы более эффективным при улучшенной возможности прогнозирования четырехмерной траектории воздушного судна была. На управлении воздушным движением лежит задача безопасного разделения воздушных судов, т.е. особенно трудная задача в перегруженном воздушном пространстве, например, вокруг аэропортов. Средства поддержки принятия решения при управлении воздушным движением (ATM), реализованные на основании точных прогнозов четырехмерной траектории, могли бы обеспечить больший объем информации о воздушном судне, которым необходимо управлять, с одновременным обеспечением безопасности.
Возможность прогнозирования четырехмерной траектории воздушного судна будет также являться преимуществом в управлении транспортными средствами, такими как беспилотные летательные аппрараты (UAV), например, в программировании планов полета беспилотных летательных аппраратов (UAV), а также в управлении и разведении их траекторий.
Для однозначного прогнозирования четырехмерной траектории воздушного судна необходимо решить систему дифференциальных уравнений, которые моделируют поведение воздушного судна и атмосферные условия. Различные системы дифференциальных уравнений доступны для использования, некоторые рассматривают воздушное судно в качестве системы из шести степеней свободы перемещения, а другие рассматривают воздушное судно в качестве материальной точки с тремя степенями свободы перемещения. Кроме того, для решения уравнений движения необходима информация, касающаяся конфигурации воздушного судна, поскольку оно будет различным образом реагировать на управляющие команды в зависимости от его конфигурации. Следовательно, дополнительные степени свободы конфигурации могут требовать наличия определения, которое описывает конфигурацию воздушного судна. Например, три степени свободы конфигурации могут быть использованы для задания конфигурации шасси, конфигурации тормоза и конфигурации устройств обеспечения подъемной силы. Соответственно, плановой схеме поведения воздушного судна может быть необходимо охватить шесть степеней свободы для однозначного задания траектории, причем три степени соответствуют перемещению воздушного судна в трех осях, а другие три степени соответствуют конфигурации воздушного судна.
Процессу вычисления необходимы входные данные, соответствующие плановой схеме поведения воздушного судна, например описание плановой схемы поведения воздушного судна, выраженное с использованием формализованного языка. Описание плановой схемы поведения воздушного судна обеспечивает информацию, достаточную для однозначного прогнозирования траектории, по которой будет лететь воздушное судно. Описание плановой схемы поведения воздушного судна обычно получают из плановой схемы полета, которая является более основной информации, касающейся того, как должно лететь воздушное судно, но которая не дает достаточной информации для обеспечения возможности однозначного определения траектории воздушного судна. Плановая схема поведения воздушного судна может содержать информацию, которая охватывает основные команды, режимы наведения и управляющие входные данные, находящиеся в распоряжении пилота и/или системы управления полетом, причем они выражены в виде формализованного языка в описании плановой схемы поведения воздушного судна.
Плановая схема поведения воздушного судна может быть отлична от плановой схемы полета. Плановая схема полета может представлять собой намерение по обобщению концепции плана полета и, таким образом, будет отражать функциональные задачи и ограничивающие условия, такие как планируемый или требуемый маршрут, и предпочтения оператора, и может быть выражена с использованием формализованного языка. Пример плановой схемы поведения воздушного судна обеспечивает инфорацию, достаточную для указания того, как охвачена по меньшей мере одна из степеней свободы воздушного судна, а пример плановой схемы полета этого не обеспечивает. Например, пример плановой схемы полета может соответствовать набору высоты от 32000 футов (9750 м) до 38000 футов (11580 м), что предоставляет то, как набор высоты выполняют открытым, а пример плановой схемы поведения воздушного судна может соответствовать набору высоты от 32000 футов до 38000 футов со скоростью набора высоты, составляющей 2000 футов в минуту (10 м/с).
Плановая схема полета не будет однозначно задавать траекторию воздушного судна, поскольку она будет содержать только некоторую информацию из инфорации, необходимой для охвата всех степеней свободы. Другими словами, оставшиеся открытые степени свободы означают, что вероятно существуют много траекторий воздушного судна, которые могли бы быть рассчитаны, что удовлетворило бы заданную плановую схему полета. Таким образом, плановая схема полета может быть рассмотрена в качестве основного примерного плана полета, который, однако, не содержит конкретных подробных сведений, необходимых для однозначного вычисления траектории.
Таким образом, дополнительная информация обязательно должна быть объединена с плановой схемой полета для охвата всех степеней свободы и для получения плановой схемы поведения воздушного судна, которая обеспечивает возможность однозначного прогнозирования четырехмерной траектории, по которой необходимо лететь. Описание плановой схемы поведения воздушного судна, которое не охватывает все степени свободы, называют открытым описанием плановой схемы поведения воздушного судна.
Плановая схема поведения воздушного судна выражена с использованием совокупности параметров, представленных с тем, чтобы обеспечить возможность решения уравнений движения. Параметры могут быть оставлены открытыми (например, уточнение диапазона допустимых параметров) или могут быть уточнены в качестве конкретного значения. Первый случай относится к параметрической плановой схеме поведения воздушного судна с тем, чтобы отличать его от последнего случая, при котором все параметры уточняют с использованием конкретных значений и который называют полностью закрытой плановой схемой поведения воздушного судна. Таким образом, открытое описание плановой схемы поведения воздушного судна может быть завершено путем добавления примеров параметрической плановой схемы поведения воздушного судна для формирования параметрического описания плановой схемы поведения воздушного судна. Параметрическое описание плановой схемы поведения воздушного судна может быть затем оптимизировано путем определения конкретных значений для каждого диапазона параметра для формирования полностью закрытого описания плановой схемы поведения воздушного судна. Теория формализованных языков может быть использована для реализации этих формулировок плановой схемы поведения воздушного судна: язык описания плановой схемы поведения воздушного судна обеспечивает совокупность инструкций и правил, которые определяют допустимые сочетания, которые выражают примеры плановой схемы поведения воздушного судна, и, поэтому, обеспечивает возможность прогнозирования траектории воздушного судна. Аналогичным образом, язык описания плановой схемы полета может обеспечить возможность выражения примеров плановой схемы полета, таких как задачи и ограничивающие условия, и включения открытых описаний плановых схем поведения воздушных судов.
ЕР-А-2040137, также на имя компании «Boeing Соmраny», более подробно описывает плановую схему поведения воздушного судна. ЕР-А-2482269, также на имя компании «Boeing Соmраny», более подробно описывает плановую схему полета.
РАСКРЫТИЕ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
В данном контексте настоящее изобретение относится к реализуемому посредством компьютера способу генерирования описания плановой схемы поведения воздушного судна, выраженного в формализованном языке, который обеспечивает однозначное четырехмерное описание планируемого перемещения и конфигурации воздушного судна во время периода полета. Период полета может составлять весь полет от взлета до приземления или его часть и может также включать выруливание на земле. Четырехмерное описание может соответствовать траектории, например четырехмерному описанию пути воздушного судна, которое может быть уточнено в качестве трехразмерного положения воздушного судна в каждом из набора моментов времени. Описание может представлять собой развитие состояния воздушного судна со временем, причем указанное состояние может содержать положение центра масс воздушного судна и другие аспекты его перемещения, такие как скорость, пространственное положение или масса.
Способ включает получение описания плановой схемы полета, соответствующего плану полета, охватывающему период полета. Это описание плановой схемы полета может быть сгенерировано пилотом или сгенерировано автоматически посредством программного обеспечения для управления полетом в воздушном судне.
Затем, способ включает анализ описания плановой схемы полета для обеспечения примеров плановой схемы полета, которые задают то, как период полета разделен в участки полета. Каждый пример плановой схемы полета может охватывать один участок полета или целое число участков полета. Участки полета вместе охватывают период полета. Таким образом, примеры плановой схемы полета, содержащейся в описании плановой схемы полета, проверяют и используют для задания участков полета, которые соответствуют временным интервалам, в течение которых указанный пример плановой схемы полета является активным. Таким образом, период полета разделен на совокупности участков полета с границами между участками полета, соответствующими примеру плановой схемы полета, становящейся активной или завершающейся. Обеспечение того, что анализ был выполнен, может соответствовать проверке того, что принятое описание плановой схемы полета было проанализировано соответствующим образом или это может соответствовать выполнению анализа.
Для каждого участка полета способ включает генерирование соответствующей совокупности данных плановой схемы участка полета, которая содержит один или большее количество примеров открытой плановой схемы поведения воздушного судна. Такое описание обеспечивает информацию для управления тем, как конкретные степени свободы перемещения и/или конфигурации могут быть охвачены в течение участка полета. Период времени, за который каждый пример плановой схемы полета является активным, обычно называют в настоящей заявке его интервалом выполнения. Каждый участок полета описан посредством совокупности данных плановой схемы участка полета, которая в целом будет содержать множество примеров открытой плановой схемы поведения воздушного судна. Например, совокупность данных плановой схемы участка полета может содержать пример открытой плановой схемы поведения воздушного судна, который относится к вертикальному пути, и другой пример открытой плановой схемы поведения воздушного судна, который относится к поперечному пути.
Способ показывает улучшение основного описания плановой схемы полета с использованием дополнительной информации. Данное улучшение выполняют по меньшей мере за три этапа.
Во-первых, выполняют этап улучшения на основании пользовательских предпочтений, который включает сравнение совокупностей данных плановых схем участков полета с ограничивающими условиями и/или задачами, хранящимися в базе данных пользовательских предпочтений. Идентифицируют ограничивающие условия и/или задачи, которые относятся к совокупности данных плановой схемы участка полета, а описание плановой схемы полета улучшают с использованием информации, описывающей идентифицированные ограничивающие условия и/или задачи, что обеспечивает формирование улучшенного описания плановой схемы полета. Данная информация может быть добавлена в качестве новых примеров плановой схемы полета или путем изменения существующих примеров плановой схемы полета. Улучшение на основании пользовательских предпочтений выполняют согласно стратегии улучшения пользовательских предпочтений.
Во-вторых, выполняют этап улучшения на основании функционального контекста, который включает сравнение совокупностей данных плановых схем участков полета с ограничивающими условиями и/или задачами, хранящимися в базе данных функционального контекста. Идентифицируют ограничивающие условия и/или задачи, которые относятся к совокупности данных плановой схемы участка полета, а описание плановой схемы полета улучшают с использованием информации, описывающей идентифицированные ограничивающие условия и/или задачи, что обеспечивает формирование дополнительно улучшенного описания плановой схемы полета. Данная информация может быть добавлена в качестве новых примеров плановой схемы полета или путем изменения существующих примеров плановой схемы полета. Улучшение на основании функционального контекста выполняют согласно стратегии улучшения функционального контекста.
В-третьих, выполняют этап улучшения на основании технических характеристик воздушного судна, который включает сравнение совокупностей данных плановых схем участков полета с ограничивающими условиями и/или задачами, хранящимися в базе данных технических характеристик воздушного судна. Идентифицируют ограничивающие условия и/или задачи, которые относятся к совокупности данных плановой схемы участка полета, а описание плановой схемы полета улучшают с использованием информации, описывающей идентифицированные ограничивающие условия и/или задачи, что обеспечивает формирование еще одного дополнительно улучшенного описания плановой схемы полета. Данная информация может быть добавлена в качестве новых примеров плановой схемы полета или путем изменения существующих примеров плановой схемы полета. Это может быть выполнено согласно стратегии улучшения технических характеристик воздушного судна.
Затем, способ включает этап завершения открытого описания плановой схемы поведения воздушного судна, извлеченного из совокупности данных плановой схемы участка полета. Данное завершение включает преобразование примеров открытой плановой схемы поведения воздушного судна, содержащейся в совокупностях данных плановых схем участков полета еще одного дополнительно улучшенного описания плановой схемы полета в примеры параметрической плановой схемы поведения воздушного судна путем идентифицирования совокупностей данных плановых схем участков полета, в которых охвачены не все степени свободы, и завершения идентифицированных совокупностей данных плановых схем участков полета путем добавления одного или большего количества примеров плановой схемы поведения воздушного судна для охвата всех степеней свободы. Примеры плановой схемы поведения воздушного судна могут представлять собой примеры параметрической плановой схемы поведения воздушного судна или могут представлять собой примеры плановой схемы поведения воздушного судна, которая обеспечивает конкретные значения параметров. Это выполняют путем выбора стратегии завершения из множества сохраненных стратегий завершения и добавления примеров плановой схемы поведения воздушного судна, соответствующей стратегии завершения. Стратегия завершения рассматривает эти ограничивающие условия и/или задачи, воздействующие на участок полета, и выбирает подходящую последовательность маневров, выраженную в терминах плановой схемы поведения воздушного судна, для удовлетворения указанным ограничивающим условиям и/или задачам. Сравнивают совокупности данных плановых схем участков полета, что обеспечивает формирование параметрического описания плановой схемы поведения воздушного судна за период полета, выраженное в формализованном языке. Этап добавления примеров плановой схемы поведения воздушного судна включает обеспечение наличия примеров параметрической плановой схемы поведения воздушного судна, что обеспечивает формирование параметрического описания плановой схемы поведения воздушного судна.
Во время любого из трех этапов улучшения, примеры открытой плановой схемы поведения воздушного судна, включенные в совокупности данных плановых схем участков полета, могут быть улучшены с использованием информации, достаточной для охвата всех степеней свободы. В таких случаях нет необходимости в этапе завершения.
После завершения, выполняют этап оптимизации параметрического описания плановой схемы поведения воздушного судна, который включает определение оптимального значения параметра каждого диапазона параметра согласно стратегии оптимизации, что обеспечивает генерирование полностью закрытого описания плановой схемы поведения воздушного судна.
Таким образом, настоящее изобретение обеспечивает трехстадийный способ улучшения описания плановой схемы полета. Во-первых, описание плановой схемы полета улучшают с использованием пользовательских предпочтений. Во-вторых, улучшенное описание плановой схемы полета дополнительно улучшают с использованием функционального контекста. Это выполняют путем идентифицирования задач и/или ограничивающих условий, относящихся к улучшенному описанию плановой схемы полета. Следовательно, этим процессом управляют посредством инфорации, уже добавленной к описанию плановой схемы полета во время улучшения на основании пользовательских предпочтений. Затем, дополнительно улучшенное описание плановой схемы полета еще раз дополнительно улучшают с использованием технических характеристик воздушного судна. Это выполняют путем идентифицирования задач и/или ограничивающих условий, относящихся к дополнительно улучшенному описанию плановой схемы полета, и, таким образом, управляют информацией, добавленной согласно пользовательским предпочтениям и функциональному контексту.
Таким образом, иерархия существует там, где пользовательские предпочтения имеют преимущественное значение над функциональным контекстом и, в свою очередь, функциональный контекст имеет преимущественное значение над техническими характеристиками воздушного судна. То есть, пользовательские предпочтения сначала используют для управления преобразованием плановой схемы полета в полностью закрытую плановую схему поведения воздушного судна. Затем функциональный контекст используют для управления преобразованем, однако это подвержено влиянию пользовательских предпочтений, уже включенных в описание плановой схемы полета. И наконец, технические характеристики воздушного судна используют для улучшения описания плановой схемы полета, которое применимо к пользовательским предпочтениям и функциональному контексту, уже включенным в описание плановой схемы полета. Данный структурированный подход был признан существенным.
Способ может содержать проверку для определения того, сгенерировано ли полностью закрытое описание плановой схемы поведения воздушного судна, которое удовлетворяет всем ограничивающим условиям (и, при необходимости, задачам), содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна.
Если полностью закрытое описание плановой схемы поведения воздушного судна не может быть сгенерировано с тем, чтобы удовлетворять всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна, то способ может сначала включать выполнение циклов оптимизации, включающее итерационное повторение этапа оптимизации параметрического описания плановой схемы поведения воздушного судна согласно альтернативным стратегиям оптимизации. Эти итерации повторяют по меньшей мере до тех пор, пока не сгенерировано полностью закрытое описание плановой схемы поведения воздушного судна, которое удовлетворяет всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна. Дополнительные циклы могут быть выполнены для обеспечения альтернативных описаний плановых схем поведения воздушных судов, которые удовлетворяют всем ограничивающим условиям и/или задачам.
Если после выполнения циклов оптимизации полностью закрытое описание плановой схемы поведения воздушного судна не может быть сгенерировано с тем, чтобы удовлетворять всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна, то способ может дополнительно включать выполнение циклов завершения, включающее итерационное повторение этапа завершения открытого описания плановой схемы поведения воздушного судна с использованием параметрической плановой схемы поведения воздушного судна согласно альтернативным стратегиям завершения. Во время каждой итерации цикла завершения, способ может включать выполнение циклов оптимизации. Итерации циклов завершения и циклов оптимизации продолжаются до тех пор, пока не сгенерировано полностью закрытое описание плановой схемы поведения воздушного судна, которое удовлетворяет всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна. Дополнительные циклы могут быть выполнены для обеспечения альтернативных полностью закрытых описаний плановых схем поведения воздушных судов, которые удовлетворяют всем ограничивающим условиям и/или задачам.
Если после выполнения циклов завершения полностью закрытое описание плановой схемы поведения воздушного судна не может быть сгенерировано с тем, чтобы удовлетворять всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна, то способ может дополнительно включать выполнение циклов функционального контекста, включающее итерационное повторение этапа улучшения на основании функционального контекста согласно альтернативным стратегиям улучшения функционального контекста с последующим выполнением этапа улучшения на основании технических характеристик воздушного судна. Во время каждой итерации цикла функционального контекста способ может включать выполнение циклов завершения как описано выше до тех пор, пока не сгенерировано полностью закрытое описание плановой схемы поведения воздушного судна, которое удовлетворяет всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна. Дополнительные циклы могут быть выполнены для обеспечения альтернативного описания плановой схемы поведения воздушного судна, которое удовлетворяет всем ограничивающим условиям и/или задачам.
Если после выполнения циклов функционального контекста полностью закрытое описание плановой схемы поведения воздушного судна не может быть сгенерировано с тем, чтобы удовлетворять всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна, то способ может включать выполнение циклов пользовательских предпочтений, включающее итерационное повторение этапа улучшения на основании пользовательских предпочтений согласно альтернативным стратегиям улучшения пользовательских предпочтений. Во время каждой итерации цикла пользовательских предпочтений способ может включать выполнение циклов функционального контекста как описано выше до тех пор, пока не сгенерировано полностью закрытое описание плановой схемы поведения воздушного судна, которое удовлетворяет всем задачам и ограничивающим условиям, содержащимся в еще одной дополнительно улучшенной плановой схеме полета, сформированной путем улучшения на основании технических характеристик воздушного судна. Дополнительные циклы могут быть выполнены для обеспечения альтернативных полностью закрытых описаний плановых схем поведения воздушных судов, которые удовлетворяют всем ограничивающим условиям и/или задачам.
Вышеописанные циклы стремяться обеспечить генерирование полностью закрытого описания плановой схемы поведения воздушного судна, которое удовлетворяет всем ограничивающим условиям и/или задачам. Это выполняют с одновременным обеспечением сохранения вышеописанной иерарахии. То есть, пользовательские предпочтения изменяют только в качестве последнего средства, поскольку цикл пользовательских предпочтений представляет собой самый последний цикл, который необходимо применить при выполнении попытки удовлетворить всем ограничивающим условиям и/или задачам. Предпоследний цикл представляет собой цикл функционального контекста, что обеспечивает то, что функциональным контекст сохраняет свое положение в иерархии. Способ предпочтительно применяет различные стратегии оптимизации в качестве первого средства, а затем применяет различные стратегии завершения. Когда это не помогает, продолжают способ с применения различных стратегий функционального контекста и стратегий пользовательских предпочтений, которые могут показывать возникновение менее предпочтительных траекторий.
Этап завершения примеров открытой плановой схемы поведения воздушного судна в совокупностях данных плановых схем участков полета включает идентифицирование стратегий завершения по степеням свободы, на которые они влияют, и выбор стратегии завершения для охвата степени свободы в идентифицированном участке полета из стратегий, идентифицированных для оказания влияния на эту степень свободы. При необходимости, способ включает идентифицирование стратегий завершения по фазе полета, к которой их применяют, и выбор стратегии завершения для охвата степени свободы из стратегий, идентифицированных для оказания влияния на эту степень свободы и идентифицированных для применения по отношению к указанной фазе полета, связанной с идентифицированным участком полета.
По меньшей мере некоторые совокупности данных плановых схем участков полета содержат пример параметрической плановой схемы поведения воздушного судна с диапазоном параметра. Способ дополнительно включает оптимизацию параметрического описания плановой схемы поведения воздушного судна путем определения оптимального значения параметра каждого диапазона параметра. Определение оптимальных значений может включать генерирование исходных значений параметров, что обеспечивает формирование модели полностью закрытого описания плановой схемы поведения воздушного судна и расчет траектории из модели полностью закрытого описания плановой схемы поведения воздушного судна. Затем, значение оценочной функции для траектории может быть рассчитано с использованием оценочной функции. За этим может последовать повторение итерации изменения значений параметров, расчет результирующей траектории и расчет значения результирующей оценочной функции для определения того, улучшено ли полностью закрытое описание плановой схемы поведения воздушного судна, что обеспечивает оптимизацию значений параметров путем улучшения значения оценочной функции. При необходимости, некоторые совокупности данных плановых схем участков полета могут быть подвержены воздействию одной или большего количества задач, которые относятся к соответствующим участкам полета. Эти задачи могут быть использованы для формирования оценочной функции.
База данных пользовательских предпочтений содержит сохраненные в ней задачи, которые могут содержать информацию, описывающую функциональные предпочтения. Задачи могут соответствовать пользовательским предпочтениям и могут быть направлены на безопасность и эффективность. Пользователь может соответствовать авиакомпании или может соответствовать пилоту. Задачи могут быть сохранены в модели пользовательских предпочтений, которая содержит информацию, описывающую такие функциональные предпочтения. Иллюстративные пользовательские предпочтения представляют собой: эксплуатационный доход, такой как максимизация веса полезного груза, минимизация потребления топлива, минимизация затрат на перелет, минимизация затрат на приземление, минимизация эксплуатационных расходов; влияние на окружающую среду, такое как минимизация выбросов СОx и NOx, минимизация шумовых воздействий; и качество обслуживания, такое как увеличение комфорта пассажиров (например устранение внезапных и экстримальных маневров) и уменьшение задержек.
Идентифицирование задач из базы данных пользовательских предпочтений, которые относятся к описанию участка полета, может включать идентифицирование задач, связанных с воздушным судном. Идентифицирование задач, которые относятся к описанию участка полета, может включать идентифицирование задач, связанных с воздушным судном, путем идентифицирования задач авиакомпании, обслуживающей воздушное судно, путем идентифицирования задач, относящихся к фазе полета, возникающей во время соответствующего участка полета, или путем идентифицирования задач, относящихся к воздушному пространству, через которое воздушное судно будет проходить во время соответствующего участка полета. Это эффективным образом отфильровывает задачи, которые не относятся к текущему участку полета. Например, задачи могут быть проигнорированы, когда они не относятся к конкретному типу воздушного судна.
База данных функционального контекста содержит хранящиеся в ней ограничивающие условия, которые содержат ограничения в отношении полета в воздушном пространстве. Например, база данных функционального контекста может содержать подробные сведения об ограниченном воздушном пространстве, особенности местности и другие навигационные опасности, и требования по воздушному движению, такие как стандартные маршруты прибытия на терминал (STARS) и стандартные схемы вылета по приборам (SIDS), по которым необходимо следовать в аэропорт и из него. Идентифицирование ограничивающих условий, которые относятся к описаниям участков полета, включает идентифицирование только тех ограничивающих условий, которые воздействуют на воздушное пространство, через которое воздушное судно будет проходить во время соответствующего участка полета.
Обычно, описание совокупности исходных условий воздушного судна будет необходимо в начале периода полета. Данное описание исходных условий может составлять часть полученного описания плановой схемы полета. В альтернативном варианте способ может дополнительно включать получение описания совокупности исходных условий воздушного судна в начале периода полета и обеспечение того, что описание плановой схемы полета и исходные условия проанализированы для обеспечения открытого описания плановой схемы поведения воздушного судна.
Как указано выше, примеры плановой схемы полета и плановой схемы поведения воздушного судна могут содержать информацию и описания конфигурации воздушного судна. Конфигурация воздушного судна может быть сгруппирована в степени свободы, которые требуют определения в плановой схеме поведения воздушного судна. Например, могут быть необходимы три степени свободы конфигурации, причем одна степень задает конфигурацию шасси, другая степень задает конфигурацию устройств обеспечения высокой подъемной силы, таких как закрылки, а еще одна степень задает конфигурацию тормозов. Шасси могут быть заданы убранными или выдвинутыми, а тормоза могут также быть заданы убранными и выдвинутыми. Конфигурации обеспечения обеспечения высокой подъемной силы может иметь значительно большее количество состояний, например соответствующих убранному и нескольким удлиненным положениям.
Следовательно, воздушное судно может быть задано посредством плановой схемы поведения воздушного судна, имеющей шесть степеней свободы, а именно три степени свободы свободы перемещения и три степени свободы свободы конфигурации, соответствующие шасси, устройствам обеспечения высокой подъемной силы и тормозам.
Три степени свободы свободы перемещения могут содержать одну степень, соответствующую боковому профилю, и две степени, соответствующие вертикальному профилю. Для охвата двух степеней, относящихся к вертикальному профилю, может быть необходима плановая схема полета, которая обеспечивает описание двух из трех аспектов перемещения воздушного судна: вертикальный путь, скорость и движущая сила.
Задачи могут относиться к конфигурации воздушного судна. Например, участок полета, соответствующий переходу в набор высоты после взлета, может иметь задачу, состоящую в минимизации шумового следа, который может потребовать действий в отношении конфигурации воздушного судна.
Любой из описанных выше способов может дополнительно включать расчет траектории за период полета из полностью закрытого описания плановой схемы поведения воздушного судна для использования во множестве различных применений. Например, траектория может быть доступна пилоту для обследования. В альтернативном варианте может быть обеспечен полет воздушного судна по траектории ручным образом посредством пилота или автоматическим образом посредством автопилота. Полностью закрытое описание плановой схемы поведения воздушного судна и результирующая траектория могут быть использованы управлением воздушным движением. Например, управление воздушным движением может сравнивать траектории, обнаруженные таким образом для идентификации конфликтных ситуаций между воздушными судами.
Как будет понятно из приведенного выше описания, компьютеры и компьютерные процессоры подходят для реализации настоящего изобретения. Термины "компьютер" и "процессор" следует толковать в их наиболее общих формах. Например, компьютер может соответствовать персональному компьютеру, универсальной ЭВМ, сети из персональных компьютеров, портативных компьютеров, планшетов, карманных компьютеров, таких как коммуникаторы (PDA), или любому другому программируемому устройству. Кроме того, возможны альтернативные варианты компьютеров и компьютерных процессоров. Могут быть использованы программируемые электронные компоненты, такие как логические программируемые контроллеры. Таким образом, настоящее изобретение может быть реализовано в виде аппаратных средств, программного обеспечения, аппаратно-программных средств и любого сочетания этих трех элементов. Далее, настоящее изобретение может быть реализовано в компьютерной инфраструктуре воздушного судна, или машиночитаемом носителе данных, имеющем записанную на нем компьютерную программу, содержащую инструкции в виде компьютерного кода, выполнение которых на компьютере вызывает выполнение эти компьютером одного или большего количества способов настоящего изобретения. Все приведенные выше ссылки на компьютер и процессор должны быть истолкованы соответствующим образом и с учетом альтернатив, описанных в настоящей заявке.
Кроме того, раскрыт реализуемый посредством компьютера способ генерирования описания плановой схемы поведения воздушного судна, выраженного в формализованном языке, который обеспечивает однозначное четырехмерное описание планируемого перемещения и конфигурации воздушного судна во время периода полета, включающий:
получение описания плановой схемы полета, соответствующего плану полета, охватывающему период полета,
обеспечение анализа описания плановой схемы полета для обеспечения примеров плановой схемы полета, каждый из которых охватывает участок полета, причем указанные участки полета вместе охватывают период полета,
генерирование, для каждого участка полета, соответствующей совокупности данных участка плановой схемы полета, которая содержит один или большее количество примеров плановой схемы полета и/или один или большее количество примеров открытой плановой схемы поведения воздушного судна, причем каждый пример открытой плановой схемы поведения воздушного судна описывает перемещение воздушного судна по меньшей мере в одной степени свободы перемещения, что обеспечивает охват указанной по меньшей мере одной соответствующей степени свободы перемещения, и/или обеспечивает описание конфигурации воздушного судна для охвата по меньшей мере одной степени свободы конфигурации,
этап улучшения на основании пользовательских предпочтений, включающий: сравнение совокупностей данных плановых схем участков полета с ограничивающими условиями и/или задачи, хранящимися в базе данных пользовательских предпочтений, и идентифицирование ограничивающих условий и/или задач, относящихся к совокупностям данных плановых схем участков полета, и улучшение совокупностей данных плановых схем участков полета с использованием информации, описывающей идентифицированные ограничивающие условия и/или задачи, что обеспечивает формирование улучшенного описания плановой схемы полета, причем указанный этап улучшения на основании пользовательских предпочтений выполняют согласно стратегии улучшения пользовательских предпочтений,
этап улучшения на основании функционального контекста, включающий: сравнение совокупностей данных плановых схем участков полета с ограничивающими условиями и/или задачами, хранящимися в базе данных функционального контекста, и идентифицирование ограничивающих условий и/или задач, относящихся к совокупностям данных плановых схем участков полета, и улучшение совокупностей данных плановых схем участков полета с использованием информации, описывающей идентифицированные ограничивающие условия и/или задачи, что обеспечивает формирование дополнительно улучшенного описания плановой схемы полета, причем указанный этап улучшения на основании функционального контекста выполняют согласно стратегии улучшения функционального контекста,
этап улучшения на основании технических характеристик воздушного судна, включающий: сравнение совокупностей данных плановых схем участков полета с ограничивающими условиями и/или задачами, хранящимися в базе данных технических характеристик воздушного судна, и идентифицирование ограничивающих условий и/или задач, относящихся к совокупности данных плановой схемы участка полета, и улучшение указанных совокупностей данных плановых схем участков полета с использованием информации, описывающей идентифицированные ограничивающие условия и/или задачи, что обеспечивает формирование еще одного дополнительно улучшенного описания плановой схемы полета,
этап завершения примеров открытой плановой схемы поведения воздушного судна, включающий: преобразование примеров открытой плановой схемы поведения воздушного судна в указанных совокупностях данных плановых схем участков полета в примеры параметрической плановой схемы поведения воздушного судна путем идентифицирования совокупностей данных плановых схем участков полета, в которых охвачены не все степени свободы, и завершение идентифицированных совокупностей данных плановых схем участков полета путем добавления или изменения одного или большего количества примеров плановой схемы поведения воздушного судна для того, чтобы охватить все степени свободы путем выбора стратегии завершения из множества сохраненных стратегий завершения и добавления или изменения примера плановой схемы поведения воздушного судна, соответствующей стратегии завершения, и сравнение совокупностей данных плановых схем участков полета, что обеспечивает наличие полностью закрытого параметрического описания плановой схемы поведения воздушного судна за период полета, выраженного в формализованном языке, причем указанный этап добавления примера плановой схемы поведения воздушного судна включает обеспечение диапазона параметра, что обеспечивает формирование параметрического описания плановой схемы поведения воздушного судна,
этап оптимизации параметрического описания плановой схемы поведения воздушного судна, включающий определение оптимального значения указанного параметра каждого диапазона параметра согласно стратегии оптимизации, что обеспечивает генерирование полностью закрытого описания плановой схемы поведения воздушного судна.
Способ может дополнительно включать, если не сгенерировано полностью закрытое описание плановой схемы поведения воздушного судна, удовлетворяющее всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна, выполнение циклов оптимизации, включающее итерационное повторение этапа оптимизации параметрического описания плановой схемы поведения воздушного судна согласно альтернативным стратегиям оптимизации до тех пор, пока не сгенерировано полностью закрытое описание плановой схемы поведения воздушного судна, которое удовлетворяет всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна.
Способ может дополнительно включать, если после выполнения циклов оптимизации не сгенерировано полностью закрытое описание плановой схемы поведения воздушного судна, удовлетворяющее всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна, выполнение циклов завершения, включающее итерационное повторение этапа завершения описания плановой схемы полета согласно альтернативным стратегиям завершения и выполнение, во время каждой итерации цикла завершения, циклов оптимизации до тех пор, пока не сгенерирована полностью закрытая плановая схема поведения воздушного судна, которая удовлетворяет всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированной путем улучшения на основании технических характеристик воздушного судна.
Способ может дополнительно включать, если не сгенерировано полностью закрытое описание плановой схемы поведения воздушного судна, удовлетворяющее всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна, выполнение циклов завершения, включающее итерационное повторение этапа завершения описания плановой схемы полета согласно альтернативным стратегиям завершения и выполнение, во время каждой итерации цикла завершения, этапа оптимизации до тех пор, пока не сгенерирована плановая схема поведения воздушного судна, которая удовлетворяет всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна.
Способ может дополнительно включать, если после выполнения циклов завершения не сгенерировано полностью закрытое описание плановой схемы поведения воздушного судна, удовлетворяющее всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна, выполнение циклов функционального контекста, включающее итерационное повторение этапа улучшения на основании функционального контекста согласно альтернативным стратегиям улучшения функционального контекста с последующим выполнением этапа улучшения на основании технических характеристик воздушного судна и выполнения, во время каждой итерации цикла функционального контекста, циклов завершения до тех пор, пока не сгенерировано полностью закрытое описание плановой схемы поведения воздушного судна, которое удовлетворяет всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна.
Способ может дополнительно включать, если после выполнения циклов функционального контекста не сгенерировано полностью закрытое описание плановой схемы поведения воздушного судна, удовлетворяющее всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна, выполнение циклов пользовательских предпочтений, включающее итерационное повторение этапа улучшения на основании пользовательских предпочтений согласно альтернативным стратегиям улучшения пользовательских предпочтений и выполнение, во время каждой итерации цикла пользовательских предпочтений, циклов функционального контекста до тех пор, пока не сгенерировано полностью закрытое описание плановой схемы поведения воздушного судна, которое удовлетворяет всем задачам и ограничивающим условиям, содержащимся еще в одном дополнительно улучшенном описании плановой схемы полета, сформированном путем улучшения на основании технических характеристик воздушного судна.
База данных функционального контекста может содержать хранящиеся в ней ограничивающие условия, которые содержат ограничения в отношении полета в воздушном пространстве, при этом, при необходимости, идентифицирование ограничивающих условий, которые относятся к совокупностям данных плановых схем участков полета, включает идентифицирование только тех ограничивающих условий, которые воздействуют на воздушное пространство, через которое воздушное судно будет проходить во время соответствующего участка полета.
База данных пользовательских предпочтений может содержать сохраненные в ней задачи, которые содержат информацию, описывающую функциональные предпочтения, при этом, при необходимости, идентифицирование задач, которые относятся к совокупностям данных плановых схем участков полета, включает идентифицирование задач, связанных с воздушным судном, например путем идентифицирования задач авиакомпании, обслуживающей воздушное судно, путем идентифицирования задач, относящихся к фазе полета, возникающей во время соответствующего участка полета, или путем идентифицирования задач, относящиеся к воздушному пространству, через которое воздушное судно будет проходить во время соответствующего участка полета.
Этап завершения описания плановой схемы полета может включать идентифицирование стратегий завершения по степеням свободы, на которые они влияют, и выбор стратегии завершения для охвата степени свободы в идентифицированном участке полета из стратегий, идентифицированных для оказания влияния на эту степень свободы, и, при необходимости, идентифицирование стратегий завершения по фазе полета, к которой их применяют, и выбор стратегии завершения для охвата степени свободы из стратегий, идентифицированных для оказания влияния на эту степень свободы и идентифицированных для применения к указанной фазе полета, связанной с идентифицированным участком полета.
Определение оптимальных значений на этапе оптимизации параметрического описания плановой схемы поведения воздушного судна может включать генерирование исходных значений параметров согласно стратегии оптимизации, что обеспечивает формирование модели описания плановой схемы поведения воздушного судна, расчет траектории из указанной модели описания плановой схемы поведения воздушного судна, расчет значения оценочной функции для траектории с использованием оценочной функции, которую, при необходимости, формируют с использованием задач, содержащихся еще в одном дополнительно улучшенном описании плановой схемы полета, и повторение итераций изменения значений параметров, расчет результирующей траектории и расчет значения результирующей оценочной функции для определения того, улучшено ли полностью закрытое описание плановой схемы поведения воздушного судна, что обеспечивает оптимизацию значений параметров путем улучшения значений оценочной функции.
Способ может включать расчет траектории за период полета из полностью закрытого описания плановой схемы поведения воздушного судна и, при необходимости, вызывают то, что воздушное судно летит по этой траектории или вызывает сравнение этой траектории с траекториями другого воздушного судна для идентификации конфликтных ситуаций.
Раскрыта компьютерная инфраструктура, запрограммированная для выполнения способа, описанного в настоящей заявке.
Раскрыто воздушное судно, содержащее компьютерную инфраструктуру.
Кроме того, раскрыта компьютерная программа, содержащая инструкции в виде компьютерного кода, выполнение которых на компьютере вызывает выполнение этим компьютером способа, описанного в настоящей заявке.
Кроме того, раскрыт машиночитаемый носитель, содержащий записанную на него компьютерную программу.
Другие аспекты настоящего изобретения вместе с предпочтительными особенностями заданы в прилагаемой формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для обеспечения более быстрого понимания настоящего изобретения, далее будут описаны предпочтительные варианты реализации посредством только одного примера со ссылкой на прилагаемые чертежи.
На фиг. 1 показана система для вычисления траектории воздушного судна с использованием описаний плановой схемы полета и плановой схемы поведения воздушного судна.
На фиг. 2 более подробно показана система по фиг. 1.
На фиг. 3 показаны элементы языка описания плановой схемы полета.
На фиг. 4 показана схема, иллюстрирующая различные типы условий триггеров.
На фиг. 5 показан способ получения описания плановой схемы поведения воздушного судна.
На фиг. 6 показано то, как могут быть завершены примеры открытой плановой схемы поведения воздушного судна в совокупности данных плановой схемы участка полета для формирования параметрического описания плановой схемы поведения воздушного судна.
На фиг. 7 показано то, как параметрическое описание плановой схемы поведения воздушного судна может быть оптимизировано для обеспечения полностью закрытого описания плановой схемы поведения воздушного судна.
На фиг. 8 показано то, как может быть улучшено описание плановой схемы полета.
На фиг. 9 показан способ получения описания плановой схемы поведения воздушного судна.
На фиг. 10 показан схематический вид системы для генерирования описания плановой схемы поведения воздушного судна.
На фиг. 11 показан поперечный профиль полета, которому необходимо следовать при заходе на посадку в аэропорту.
На фиг. 12 показаны ограничения вертикального профиля полета, которые применяются к заходу на посадку, показанному на фиг. 11.
На фиг. 13 показаны вертикальные профили полета, которые соответствуют ограничениям, показанным на фиг. 12.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фиг. 1 и 2 показана система для вычисления траектории 100 воздушного судна из описания плановой схемы поведения воздушного судна 114, которое в свою очередь получено из описания плановой схемы 101 полета.
На фиг. 1 показана основная схема того, как плановая схема полета может быть использована для получения плановой схемы поведения воздушного судна и того, как описание 114 плановой схемы поведения воздушного судна может быть использовано для получения описания траектории 122 воздушного судна. По существу, описание 101 плановой схемы полета выдают в качестве входных данных на инфраструктуру 103 для генерирования плановой схемы. Инфраструктура 103 для генерирования плановой схемы определяет плановую схему поведения воздушного судна с использованием инструкций, обеспеченные плановой схемой 101 полета, и других входных данных с тем, чтобы убедиться в том, что совокупность инструкций обеспечена в качестве описания 114 плановой схемы поведения воздушного судна, которое будет обеспечивать возможность рассчета однозначной траектории 122. Данный процесс может включать промежуточные этапы улучшения плановой схемы 101 полета и завершения улучшенной плановой схемы полета для формирования параметрического описания плановой схемы поведения воздушного судна до окончательной оптимизации параметрического описания плановой схемы поведения воздушного судна для создания полностью закрытого описания 114 плановой схемы поведения воздушного судна.
Полностью закрытое описание 114 плановой схемы поведения воздушного судна, выданное инфраструктурой 103 для генерирования плановой схемы, может быть затем использовано в качестве входных данных для инфраструктуры 110 для вычисления траектории. Инфраструктура 110 для вычисления траектории расчитывает однозначную траекторию 122 с использованием полностью закрытой плановой схемы 114 поведения воздушного судна и других входных данных, которые необходимы для решения уравнений движения воздушного судна.
На фиг. 2 более подробно показана система по фиг. 1. Как можно увидеть, инфраструктура 103 для генерирования плановой схемы принимает описание 101 плановой схемы полета в качестве входных данных вместе с описанием исходного состояния 102 воздушного судна (исходное состояние 102 воздушного судна может быть задано в качестве части описания 101 плановой схемы полета, при этом эти двое входных данных одинаково эффективны). Инфраструктура 103 для генерирования плановой схемы содержит устройство 104 для генерирования плановой схемы и пару баз данных, одна из которых хранит модель 105 пользовательских предпочтений, а другая хранит модель 106 функционального контекста.
Модель 105 пользовательских предпочтений реализует предпочтительные функциональные стратегии, управляющие воздушным судном, и может соответствовать задачам и ограничивающим условиям, например предпочтениям авиакомпании по отношению к маршрутам; скоростям; конфигурации воздушного судна, такой как время выпуска закрылков и время выпуска шасси; загрузке (полезный груз и топливо); тому, как реагировать на метеорологические условия, такие как температура, скорость ветра, высота, реактивный поток, гроза и турбулентность, поскольку это будет воздействовать на горизонтальный и вертикальный путь воздушного судна, а также его профиль скорости; схеме затрат, такой как минимизация времени полета или стоимости полета, эксплуатационные расходы, влияние на окружающую среду; возможностям связи; и мерам предосторожности. Модель 105 пользовательских предпочтений может быть использована при преобразовании описания 101 плановой схемы полета в выходные данные 114 полностью закрытой плановой схеме поведения воздушного судна - в улучшении плановой схемы полета при завершении открытого описания плановой схемы поведения воздушного судна или в оптимизации параметрической плановой схемы поведения воздушного судна - путем обеспечения дополнительных подробных сведений, как будет более подробно описано далее.
Модель 106 функционального контекста реализует ограничивающие условия в отношении использования воздушного пространства. Например, модель 106 функционального контекста может содержать подробные сведения об ограниченном воздушном пространстве и о требованиях по воздушному движению, таких как стандартные маршруты прибытия на терминал (STARS) и стандартные схемы вылета по приборам (SIDS), которым необходимо следовать на пути в аэропорт и из него. Модель 106 функционального контекста также используют при преобразовании описания 101 плановой схемы полета в полностью закрытое описание 114 плановой схемы поведения воздушного судна -в улучшении плановой схемы полета при завершении открытого описания плановой схемы поведения воздушного судна или в оптимизации параметрического описания плановой схемы поведения воздушного судна - путем обеспечения дополнительных подробных сведений, как будет подробно описано далее.
Устройство 104 для генерирования плановой схемы использует описание 101 плановой схемы полета, описание 102 исходного состояния, модель 105 пользовательских предпочтений и модель 106 функционального контекста для преобразования описания 101 плановой схемы полета полностью закрытой плановой схемы 114 поведения воздушного судна в качестве его выходных данных. Устройство 104 для генерирования плановой схемы может также использовать модель 118 технических характеристик воздушного судна при преобразовании описания 101 плановой схемы полета в полностью закрытое описание 114 плановой схемы поведения воздушного судна (как показано пунктирной линией на фиг. 2). Как будет понятно из приведенного далее описания, использование модели 188 технических характеристик воздушного судна обеспечивает возможность проверки устройством 104 для генерирования плановой схемы того, что предложенное полностью закрытое описание 114 плановой схемы поведения воздушного судна допустимо из перспективы воздушного судна (то есть это воздушное судно выполнено с возможностью полета по соответствующей траектории).
На фиг. 2 показано, что инфраструктура 110 для вычисления траектории содержит устройство 112 для вычисления траектории. Устройству 112 для вычисления траектории необходимо в качестве входных данных вышеописанное полностью закрытое описания 114 плановой схемы поведения воздушного судна, а также описание 116 исходного состояния. Описание 116 исходного состояния может быть задано в качестве части описания 114 плановой схемы поведения воздушного судна, при этом эти двое входных данных одинаково эффективны. Что касается устройства 112 для вычисления траектории, то для обеспечения описания вычисленной траектории 122 для воздушного судна указанное устройство 112 для вычисления траектории использует базы данных, содержащие две модели: модель 118 технических характеристик воздушного судна и модель 120 Земли.
Модель 118 технических характеристик воздушного судна обеспечивает значения аспектов технических характеристик воздушного судна, требуемых устройством 112 для вычисления траектории, чтобы осуществить интегрирование уравнений движения. Эти значения зависят от типа воздушного судна, для которого вычисляют траекторию, текущего состояния перемещения воздушного судна (положение, скорость, вес и т.д.) и текущих локальных атмосферных условий.
Кроме того, значения технических характеристик могут зависеть от планируемой работы воздушного судна, то есть от плановой схемы поведения воздушного судна. Например, устройство 112 для вычисления траектории может использовать модель 118 технических характеристик воздушного судна для обеспечения значения мгновенной скорости снижения, соответствующей конкретному весу воздушного судна, атмосферным условиям (высота по давлению и температура) и планируемому скоростному плану (например постоянной отрегулированной скорости воздуха). Устройство 112 для вычисления траектории будет также запрашивать из модели 118 технических характеристик воздушного судна значения применимых ограничений с тем, чтобы обеспечить сохранение перемещения воздушного судна в пределах радиуса полета. Модель 118 технических характеристик воздушного судна также ответственна за обеспечение наличия устройства 112 для вычисления траектории с другими относящимися к техническим характеристикам аспектами, которые характерны для воздушного судна, такими как время выпуска закрылков и время выпуска шасси. Как указано выше, устройство 104 для генерирования плановой схемы может также использовать модель 118 технических характеристик воздушного судна для обеспечения того, что полностью закрытое описание 114 плановой схемы поведения воздушного судна, которое оно будет предлогать, допустимо из перспективы воздушного судна.
Модель 120 Земли обеспечивает информацию, относящуюся к условиям окружающей среды, таким как состояние атмосферы, погодные условия, гравитация и магнитное возмущение.
Устройство 112 для вычисления траектории использует входные данные 114 и 116, модель 118 технических характеристик воздушного судна и модель 120 Земли для решения системы уравнений движения. Существует множество различных систем уравнений движения, которые отличаются по сложности и которые могут уменьшить перемещение воздушного судна до меньшего количества степеней свободы посредством конкретной совокупности упрощающих допущений. Например, могут быть использованы уравнения движения, описывающие перемещение воздушного судна в шести степенях свободы перемещения. Упрощенная система уравнений движения может использовать только три степени свободы перемещения.
Таким образом, устройство 112 для вычисления траектории обеспечивает в качестве выходных данных описание вычисленной траектории 122. Это описание может представлять собой графическое описание траектории, например отображаемой на дисплее. В альтернативном варианте описание вычисленной траектории 122 может представлять собой текстовое описание, содержащее компьютерный файл, из которого затем может быть сгенерировано графическое изображение.
Устройство 112 для вычисления траектории также обеспечивает в качестве выходных данных описание плановой схемы 123 поведения воздушного судна. Она может быть выполнена такой же, как и плановая схема 114 поведения воздушного судна, принятая в качестве входных данных. Данное описание 123 иногда используется устройством 104 для генерирования плановой схемы для разработки дополнительных версий плановой схемы поведения воздушного судна, а также будет описано далее более подробно.
Инфраструктура 110 для вычисления траектории может быть выполнена воздушной или наземной. Например, инфраструктура 110 для вычисления траектории может быть связана с системой управления полетом воздушного судна, которая управляет воздушным судном на основании спрогнозированной траектории, которая охватывает функциональные предпочтении авиакомпании и коммерческие задачи. Основная задача наземных инфраструктур 120 для вычисления траекторий состоит в управлении воздушным движением.
Использование стандартного подхода к описанию траектории воздушного судна обеспечивает возможность лучшего взаимодействия между пользователями воздушного пространства и диспетчерами. Это также обеспечивает лучшую совместимость между большинством существующих пакетов программного обеспечения, которые в настоящее время прогнозируют траектории, даже если для преобразования инфорации из стандартного формата в подходящий формат необходимы переводчики.
Кроме того, стандартный подход также работает на преимущество плановой схемы полета и плановой схемы поведения воздушного судна. Например, плановая схема полета может быть выражена с использованием инструкций и других структур реализации формализованного языка, используемого для выражения плановой схемы поведения воздушного судна в описании 114 плановой схемы поведения воздушного судна. Кроме того, плановая схема полета обеспечивает пользователя расширением по отношению к языку плановой схемы поведения воздушного судна, которые обеспечивает возможность формулирования плановой схемы полета, в которой известны только конкретные аспекты перемещения воздушного судна. Путем использования общего формата выражений, эти примеры плановой схемы полета могут быть легко улучшены, добавлены к используемым примерам плановой схемы поведения воздушного судна во время завершения и затем оптимизированы для формирования полностью закрытого описания 114 плановой схемы поведения воздушного судна.
Поскольку плановая схема полета можно считать более широкой и она может представлять собой обобщенную форму плановой схемы поведения воздушного судна, то полезно начать с рассмотрения плановой схемы поведения воздушного судна, так что могут быть введены основные концепции, также используемые в генерировании плановой схемы полета.
Плановая схема поведения воздушного судна
Полностью закрытое описание 114 плановой схемы поведения воздушного судна представляте собой выражение совокупности инструкций в формализованном языке, язык описания плановой схемы поведения воздушного судна, который однозначно задает траекторию 122 воздушного судна. Данное выражение использовано устройством 112 для вычисления траектории, чтобы осуществлять решение уравнений движения, которые определяют перемещение воздушного судна. Для решения уравнений также обязательно должна быть уточнена конфигурация воздушного судна. Например, информация о конфигурации может быть необходима для принятия решения по настройкам шасси, тормозов и устройств обеспечения высокой подъемной силы. Следовательно, плановая схема 114 поведения воздушного судна содержит совокупность инструкций, содержащую инструкции по конфигурации, которые полностью описывают аэродинамическую конфигурацию воздушного судна, и инструкции по перемещению, которые однозначно описывают то, как воздушному судну необходимо лететь и, следовательно, результирующее перемещение воздушного судна. Поскольку инструкции перемещения и инструкции конфигурации необходимы для задания перемещения воздушного судна уникальным образом, то они вместе называются в настоящей заявке инструкциями, задающими степени свободы: инструкции по перемещению относятся к степеням свободы перемещения, а инструкции по конфигурации относятся к степеням свободы конфигурации. Например, шесть степеней свободы могут быть использованы для описания воздушного судна, такие как поперечный путь (перемещение), вертикальный путь (перемещение), скорость (перемещение), шасси (конфигурация), устройства обеспечения высокой подъемной силы (конфигурация) и тормоза (конфигурация).
В данной области техники существует множество различных систем уравнений движения, которые могут быть использованы для описания перемещения воздушного судна. Системы уравнений в целом отличаются друг от друга в силу их сложности. В принципе, любая из этих систем уравнений может быть использована в настоящем изобретении. Фактическая форма уравнений движения может влиять на то, как сформулирован язык описания плановой схемы поведения воздушного судна, поскольку перемененные, которые возникают в уравнениях движения, также возникают в инструкциях, которые соответствуют примерам плановой схемы поведения воздушного судна. Однако, примеры плановой схемы полета не ограничены тем, что они могут выразить плановую схему полета в общем виде. Любые детали, специфичные для конкретных уравнений движения, которые должны быть использованы, не обязательно должны быть уточнены в примерах плановой схемы полета и могут быть добавлены при формировании параметрического описания плановой схемы поведения воздушного судна.
Язык описания плановой схемы поведения воздушного судна представляет собой формализованный язык, базовые элементы которого представляют собой инструкции. Грамматика формализованного языка обеспечивает основу, которая обеспечивает возможность объединения инструкций в словосочетания, а затем в предложения, которые могут быть использованы для описания участков полета. Каждый участок полета имеет соответствующую совокупность данных плановой схемы участка полета, которая содержит совокупность инструкций, описывающих воздушное судно и его перемещение во время участка полета. В открытых описаниях плановых схем поведения воздушных судов остаются открытыми некоторые степени свободы перемещения и/или конфигурация. Однако, в полностью закрытом описании 114 плановой схемы поведения воздушного судна каждая совокупность данных плановой схемы участка полета содержит завершающую совокупность инструкций, которые охватывают все степени свободы перемещения, и, таким образом, однозначно задает траекторию 122 воздушного судна на протяжении соответствующего участка полета.
Инструкции можно считать за отдельные части информации, которая охватывает основные комманды, режимы наведения и управляющие входные данные, имеющиеся в распоряжении пилота и/или системы управления полетом. Каждая инструкция может быть охарактеризована посредством трех основных особенностей: воздействие, назначение и интервал выполнения. Воздействие задано посредством математического описания его влияния на перемещение воздушного судна. Назначение задано посредством характерной для него цели и относится к функциональной цели команды, режиму наведения или управляющим входным данным, охваченным этой инструкцией. Интервал выполнения представляет собой период, во время которого инструкция воздействует на перемещение воздушного судна. Выполнение совместимых инструкций могут накладываться друг на друга, а несовместимые инструкции не могут иметь наложение интервалов выполнения (например инструкции, которые вызывают возникновение конфликтного требования для воздушного судна, состоящего в наборе высоты и снижении, были бы несовместимыми).
Лексические правила охватывают все возможные пути объединения инструкций в описания плановых схем поведения воздушных судов (в частности открытые, параметрические и полностью закрытые описания плановых схем поведения воздушных судов), так что предотвращено возникновение перекрывающих друг друга несовместимых инструкций и, таким образом, однозначно задана траектория воздушного судна.
Плановая схема полета
Определение конкретной траектории воздушного судна представляет собой результат нахождения компромисса между заданной совокупностью задач, которой необходимо удовлетворять, и заданной совокупностью ограничивающих условий, которым необходимо следовать. Эти ограничения и задачи представляют собой некоторый предел, влюченный в качестве части описания 101 плановой схемы полета, которая могла бы быть рассмотрена в качестве плана полета. Кроме того, ограничивающие условия и задачи добавляют во время процесса улучшения. Важно, что плановая схема полета не обязательно должна однозначно определять перемещение воздушного судна: в принципе, может существовать множество траекторий, которые удовлетворяют совокупности задач и ограничивающих условий, охваченных полностью закрытым описанием 101 плановой схемы полета. Любое описание плановой схемы полета может в целом дать начало серии полностью закрытых описаний 114 плановых схем поведения воздушных судов, каждое из которых удовлетворяет задаче плановой схемы полета и ограничивающим условиям и приводит к различной единственной траектории. Например, пример плановой схемы полета может задавать поперечный путь, которым необходимо следовать на протяжении участка полета, однако он может не уточнять вертикальный путь, которым необходимо следовать в течение того же самого интервала выполнения: многие примеры плановой схемы поведения воздушного судна могут быть сгенерированы из этого примера плановой схемы полета, причем каждый пример плановой схемы поведения воздушного судна соответствует различному вертикальному профилю на протяжении участка полета.
Таким образом, описание 101 плановой схемы полета обычно обязательно должно быть улучшено с использованием информации, достаточной для обеспечения возможности определения уникальной плановой схемы поведения воздушного судна и, поэтому, уникальной траектории. Улучшение описания 101 плановой схемы полета и завершение открытой плановой схемы поведения воздушного судна с использованием параметрической плановой схемы поведения воздушного судна, и получение через процесс оптимизации полностью закрытой плановой схемы поведения воздушного судна представляют собой функциональную способность устройства 104 для генерирования плановой схемы, причем устройство 112 для вычисления траектории отоветственно за определение соответствующей траектории 122 из полностью закрытого описания 114 плановой схемы поведения воздушного судна.
Как пояснено выше, описание 101 плановой схемы полета содержит относящуюся к траектории информацию, которая не обязательно однозначно определяет перемещение воздушного судна, однако вместо этого обычно применяет совокупность высокоуровневых условий, которые задают конкретные аспекты, которые воздушное судно должно соблюдать в течение его перемещения (например следование конкретным маршрутом, сохранение заданной скорости в конкретной области). Плановую схему полета улучшают с использованием основных функциональных задач и ограничивающих условий, которые обязательно должны удовлетворять траектории (например планируемый маршрут, предпочтения оператора, стандартная функциональная процедура, ограничения для управления воздушным движением и и.д.) посредством ссылки на модель 105 пользовательских предпочтений и модель 106 функционального контекста. Модель 118 технических характеристик воздушного судна может также быть использована для улучшения плановой схемы полета.
С учетом информации, которую используют непосредственно для генерирования и улучшения плановой схемы полета, возможно группирование схожих элементов в четыре различные структуры: участки полета, функциональный контекст, пользовательские предпочтения и технические характеристики воздушного судна.
Участки полета объединяются для формирования пути полета, которому воздушное судно должно следовать в течение полета, то есть четырехмерную траекторию составляют из групп последовательных участков полета. Как пояснено выше по отношению к модели 106 функционального контекста, функциональный контекст могут содержать совокупность ограничений для управления воздушным движением, которая может ограничивать траекторию, по которой следует воздушное судно, в одном или большем количестве размеров. Они могут содержать ограничивающие условия высоты, ограничивающие условия скорости, ограничивающие условия набора высоты и/или снижения, ограничивающие условия курса/наведения/маршрута, ограничивающие условия стандартных процедур, ограничивающие условия структур маршрутов, ограничивающие условия для SID, ограничивающие условия для STAR, а также ограничивающие условия координирования и перемещения (например диапазоны скорости и высоты и положение точек входа и выхода, которые следует соблюдать при любом полете при перемещении воздушного судна из одного сектора в другой). Эти ограничения могут быть получены из модели 106 функционального контекста и могут быть использованы для улучшения плановой схемы 101 полета.
Как пояснено выше по отношению к модели 105 пользовательских предпочтений, пользовательские предпочтения обычно направлены на безопасность и эффективность, а также обычно отличаются от одного пользователя (такого как авиакомпания или пилот) к другому. Наиболее общие пользовательские предпочтения относятся к: предпочтительным маршрутам; предпочтительной конфигурации воздушного судна, содержащей время раскрытия; увеличение эксплуатационных затрат, такое как максимизация веса полезного груза, с которым необходимо лететь, минимизация потребления топлива, минимизация пошлин за пролет, минимизация пошлин за приземление и минимизация эксплуатационных расходов; влияние на окружающую среду, такое как минимизация выбросов СОx и NOx, минимизация шумовых воздействий; качество обслуживания, такое как увеличение комфорта пассажиров (например предотвращение внезапных и экстримальных маневров, предотвращение возникновения торбулентности) и уменьшение задержек. Эти предпочтения могут соответствовать ограничивающим условиям или задачам. Эти ограничения и задачи могут быть получены из контекстной модели 105 пользовательских предпочтений и использованы для улучшения плановой схемы полета.
Как пояснено выше в отношении модели 118 технических характеристик воздушного судна, технические характеристики воздушного судна содержат значения, такие как тип воздушного судна, вес воздушного судна, значения технических характеристик, такие как потребление топлива, задержка, время, время реагирования (например на команду по крену), ограничения для того, чтобы убедиться в том, что перемещение воздушного судна сохраняется в пределах радиуса полета (например максимальные и минимальные скорости) и другие относящиеся к техническим характеристикам аспекты, такие как время выпуска закрылков и время выпуска шасси. Эти аспекты технических характеристик могут соответствовать ограничивающим условиям. Например, ограничения технических характеристик могут быть использованы в качестве ограничивающих условий, таких как ограничивающее условие не превышать конкретного угла крена. Эти ограничения могут быть получены из модели 118 технических характеристик воздушного судна и использованы для улучшения плановой схемы полета.
Язык описания плановой схемы полета (FIDL)
Предлагается представить плановую схему полета с использованием формализованного языка, образованного непустой конечной совокупностью символов или букв, известной как алфавит, который использован для генерирования совокупности строк или слов. Также необхоима грамматика, а именно совокупность правил, определяющих допустимое объединение алфавита в строки и строк в предложения.
Алфавит содержит три типа букв, как показано на фиг. 3: описания участков полета, ограничивающие условия и задачи. Предложение сформировано путем надлежащего сочетания этих элементов в соответствии с грамматическими правилами, которые будут описаны далее. Предложение представляет собой упорядоченную последовательность описаний участков полета, то есть упорядоченных согласно тому, когда они возникают, причем в указанной последовательности различные ограничивающие условия и задачи являются активными для оказания воздействия на перемещение воздушного судна.
Описания участков полета, в рамках алфавита, представляют собой описание примеров плановой схемы полета, активной на протяжении участка полета, и отражают плановую схему изменения состояния перемещения воздушного судна из одного состояния в другое (например переход от одной 3D точки к другой 3D точке, апоорот между двумя курсами, ускорение между двумя скоростями или изменение высоты). Участок полета может быть охарактеризован в его описании участка полета посредством двух состояний перемещения воздушного судна, идентифицируемых по условию или событию, которое устанавливает конкретные требования к траектории, по которой необходимо лететь между этими состояниями. Эти условия или триггеры отражают интервал выполнения участка полета. Совокупность данных плановой схемы участка полета, сзязанная с этими триггерами, может охватывать одну или большее количество степеней свободы на протяжении участка полета, с учетом степени свободы перемещения и конфигурации.
Ограничивающие условия отражают ограничения в отношении траектории, как описано выше, и могут быть достигнуты путем использования открытых степеней свободы, которые доступны во время применяемого участка полета или применяемых участков полета.
Задачи, как описано выше, отражают желание, относящееся к траектории, максимизировать или минимизировать конкретные функциональные возможности (например рейс для минимизации затрат). Задачи могут быть решены путем использования открытых степеней свободы, которые доступны во время применяемого участка полета или применяемых участков полета, за исключением тех, которые используют в отношении ограничивающих условий, воздействующих на участок полета или участки полета.
При объединении этих трех элементов возможно построение слов в виде допустимых строк языка описания плановой схемы полета (FIDL). Например, информация о плановой схеме полета "полет от точки RUSIK маршрута до точки FTV маршрута" может быть выражена посредством слова языка описания плановой схемы полета (FIDL), содержащего совокупность данных плановой схемы участка полета, исходное состояние которой задано посредством координат точки RUSIK маршрута и окончательное состояние которой задано посредством координат точки FTV маршрута. Данная совокупность данных плановой схемы участка полета могла бы быть улучшена посредством ограничивающего условия, такого как "поддержание уровня полета выше 300 (FL300)". Таким же образом, было бы возможно добавление информации к данному слову языка описания плановой схемы полета (FIDL), касающейся некоторых задач в пределах траектории, таких как максимизация скорости. Для того, чтобы убедиться в том, что любое ограничивающее условие или задача сравнима с совокупностью данных плановой схемы участка полета, не должен быть предварительно охвачен задействованный аспект перемещения или конфигурации воздушного судна, выраженный в качестве степени свободы. В предыдущем примере ограничивающее условие уровня полета соответствует описанию участка полета, поскольку совокупность данных плановой схемы участка полета не задает какое-либо вертикальное поведение. Часто ограничивающие условия и задачи будут распространяться на последовательность участков полета и, таким образом, их добавляют к составной совокупности данных плановой схемы участка полета.
Характерные особенности совокупности данных плановой схемы участка полета представляю собой воздействие, интервал выполнения и код участка полета. Воздействие обеспечивает информацию о поведении воздушного судна на протяжении участка полета, то есть, оно представляет собой открытую плановую схему поведения воздушного судна, и могло бы находиться в диапазоне от отсутствия информации до полного описания того, как воздушное судно летит в пределах участка полета. Воздействие характеризуется совокупностью, которая представляет собой объединенный в единое целое элемент, сформированной посредством групп инструкций языка описания плановой схемы поведения воздушного судна (AIDL) или представляет собой сочетание других совокупностей, однако ему не обязательно удовлетворять требованию охвата всех степеней свободы.
Интервал выполнения задает интервал, во время которого описание участка полета является активным, заданный посредством триггеров завершения и начала. Триггеры завершения и начала могут принимать различные формы, как указано на фиг. 4. Явные триггеры 310 разделены на фиксированные триггреры 312 и плавающие триггеры 314. Фиксированные триггеры 312 соответствуют конкретному временному моменту для начала или завершения интервала выполнения, например для задания скорости воздуха в заданное время. Плавающие триггреры 314 зависят от состояния переменной воздушного судна, достигающей конкретного значения для того, чтобы вызвать начало или завершение интервала выполнения, например сохранить скорость воздуха менее 250 узлов до тех пор, пока высота превышает 10,000 фут. Неявные триггеры 320 разделены на связанные триггеры 322, автоматические триггры 324 и триггеры 326 по умолчанию. Связанный триггер 322 указан посредством ссылки на другой участок полета, например путем начала при запуске посредством триггера завершения предыдущего участка полета. Автоматические триггеры отвечают за определение того, удовлетворяли ли условия устройству 112 для вычисления траектории, например когда условия неизвестны во время генерирования плановой схемы, и станут очевидными только во время вычисления траектории.
Триггеры по умолчанию отражают условия, которые известны при генерировании плановой схемы, однако их определяют при рассчете траектории, поскольку они зависят от ссылки на модель технических характеристик воздушного судна.
Ограничивающие условия могут быть возложены на самого себя оператором воздушного судна, такие как предотвращение пошлин за перелет (в данном случае информация, относящаяся к ограничивающим условиям, хранится в модели 105 пользовательских предпочтений), посредством функционального контекста или управления воздушным движением, такого как следование путем полета STAR (в данном случае информация, относящаяся к ограничивающим условиям, хранится в модели 106 функционального контекста), или посредством ограничений технических характеристик воздушного судна (в данном случае информация, относящаяся к ограничивающим условиям, хранится модели 118 технических характеристик воздушного судна). В любом случае, окончательное воздействие на перемещение воздушного судна будет представлять собой ограничение в отношении возможного поведения воздушного судна во время конкретного интервала. Ограничивающие условия могут быть классифицированы согласно степени или степеням свободы, подверженным воздействию ограничивающего условия, которое полезно при определении того, может ли это быть применено к совокупности данных плановой схемы участка полета (то есть при определении того, является ли эта степень свободы открытой и, поэтому, доступной).
Задачи задают в качестве операторов, которые могут быть объединены в оценочную функцию, оптимизация которой запускает процесс обнаружения наиболее подходящей траектории. Функциональные возможности могут явным образом задавать переменную или переменнные, используемые для оптимизации (например высоту, скорость набора высоты, радиус поворота), и могут возвращать им значение, которое минимизирует или максимизирует функциональные возможности. Переменные управления относятся к степеням свободы, используемым для достижения функциональных возможностей. Таким образом, они уточняют плановую схему использования одной или большего количества степеней свободы для достижения оптимизации. Когда не задано какой-либо переменной управления, процесс генерирования плановой схемы будет использовать оставшуюся открытую степень свободы для достижения оптимизации. Задачи могут быть классифицированы с учетом степени свободы, которая может может быть подвержена воздействию задачи.
Грамматика языка описания плановой схемы полета (FIDL) разделена на лексические и синтаксические правила. Шаблон содержит совокупность правил, которые определяют создание допустимых слов с использованием описаний участков полета, ограничивающих условий и задач. Последнее содержит совокупность правил для генерирования допустимых предложений на языке описания плановой схемы полета (FIDL).
Лексические правила рассматривают описания участков полета в качестве лексем языка описания плановой схемы полета (FIDL), то есть минимального и неделимого элемента, который является содержательным сам по себе. Ограничивающие условия и задачи рассматривают в качестве префиксов языка описания плановой схемы полета (FIDL) (или суффиксов), которые дополняют и улучшают значение лексем, однако не имеют какого-либо значения по отдельности. Таким образом, лексические правила описывают то, как объединить лексемы с префиксами для обеспечения генерирования допустимой строки языка описания плановой схемы полета (FIDL). Они также определяют то, является ли допустимой строка, сформированная из лексем и префиксов, в языке описания плановой схемы полета (FIDL).
Лексические правила основаны на открытых и закрытых степенях свободы, которые характеризуют участок полета. Если участок полета не имеет никакой открытой степени свободы, то это означает, что соответствующие лексемы являются в целом значимыми и их значение не может быть дополнено любым префиксом (ограничивающим условием или задачей). Для лексем, чьи участки полета имеют одну или большее количество открытых степеней свободы, может быть добавлено так много префиксов, сколько открытых степеней свободы.
Синтаксические правила языка описания плановой схемы полета (FIDL) используют для идентификации того, является ли допустимым предложение, сформированное посредством слов языка описания плановой схемы полета (FIDL), или нет. Сформированное надлежащим образом предложение на языке описания плановой схемы полета (FIDL) задано последовательностью из связанных совокупностей данных плановых схем участков полета, улучшено с использованием ограничивающих условий и задач, которые отражают хронологическую последовательность состояний перемещения воздушного судна во время периода полета.
Генерирование плановой схемы поведения воздушного судна
Способ генерирования плановой схемы поведения воздушного судна будет описан далее согласно фиг. 5.
На этапе 510 запускают инфраструктуру 103 для генерирования плановой схемы для создания или получения описания 101 плановой схемы полета, которая должна быть использована в конкретном функциональном контексте, для конкретного пользователя и для конкретной модели воздушного судна.
На этапе 520 анализируют описание 101 плановой схемы полета и исходные условия 102 посредством инфраструктуры 103 для генерирования плановой схемы для создания участков полета и соответствующих совокупностей данных плановых схем участков полета, содержащих примеры открытой плановой схемы поведения воздушного судна для охвата каждого участка полета. В некоторых вариантах реализации проанализированная плановая схема полета будет содержать совокупности данных плановых схем участков полета, уже дополненных ограничивающими условиями или задачами, например, как уже обеспечено оператором при задании исходной плановой схемы полета в качестве части плана полета или т.п.
Проанализированная плановая схема полета выдана на устройство 104 для генерирования плановой схемы таким образом, чтобы она могла быть преобразована в полностью закрытое описание 114 плановой схемы поведения воздушного судна. Устройство 104 для генерирования плановой схемы имеет в своем распоряжении совокупность стратегий и эвристических правил для обеспечения возможности преобразования исходной плановой схемы полета в полностью закрытое описание 114 плановой схемы поведения воздушного судна путем добавления информации к совокупностям данных плановых схем участков полета для охвата всех степеней свободы. Этот процесс содержит этапы 530-560, показанные вкратце на фиг. 5 и показанные более подробно на фиг. 6-10.
На этапе 530 устройство 104 для генерирования плановой схемы использует модель 105 пользовательских предпочтений, модель 106 функционального контекста и модель 118 технических характеристик воздушного судна для улучшения описания плановой схемы полета. Устройство 104 для генерирования плановой схемы идентифицирует ограничивающие условия и задачи из моделей 105, 106 и 118, которые относятся к участкам полета (например не все ограничивающие условия, включаемые в функциональный контекст, подходят для применения к конкретному маршруту или ко всем участкам полета, или в отношении конкретного пути полета). Далее более подробно описано то, как идентифицируют родственные ограничивающие условия и задачи. Устройство 104 для генерирования плановой схемы улучшает плановую схему полета путем расширения совокупностей данных плановых схем участков полета путем добавления дополнительных примеров участков полета или путем изменения существующего примера плановой схемы полета таким образом, что результирующий пример плановой схемы полета уточняет родственные ограничивающие условия и задачи согласно синтаксическим и лексическим правилам, составленным посредством языка описания плановой схемы полета. Выходные данные этапа 530 представляют собой улучшенное описание плановой схемы полета.
На этапе 540 устройство 104 для генерирования плановой схемы идентифицирует совокупности данных плановых схем участков полета улучшенного описания плановой схемы полета, имеющей открытые степени свободы. Устройство 104 для генерирования плановой схемы заполняет эти совокупности данных примерами плановой схемы поведения воздушного судна, такими как совокупности, для охвата всех степеней свободы. Примеры плановой схемы поведения воздушного судна могут содержать некоторые примеры параметрической плановой схемы поведения воздушного судна. Этот процесс запускают посредством нескольких стратегий завершения на основании последовательности и типа любых ограничивающих условий, включенных в улучшенное описание плановой схемы полета. В целом, ограничивающие условия не вызывут точного определения конкретного параметра уникальным образом, однако вместо этого обычно задают диапазон параметров. Например, ограничивающее условие, добавленное к совокупности данных плановой схемы участка полета, может точно определить максимальную скорость воздуха, при которой необходимо лететь, оставляя открытым диапазон параметров скорости воздуха. Следовательно, завершение обычно включает добавление примеров параметрической плановой схемы поведения воздушного судна.
На этапе 550 устройство 104 для генерирования плановой схемы оптимизирует параметрическое описание плановой схемы поведения воздушного судна. Данный процесс оптимизации учитывает все диапазоны параметров, точно определенные в параметрическом описании плановой схемы поведения воздушного судна, и расчитывает оптимальные значения для каждого параметра путем оптимизации общей оценочной функции, которая рассчитана из всех задач, представленных в улучшенном описании плановой схемы полета. Диапазоны параметров, указанные в каждом примере параметрической плановой схемы поведения воздушного судна, затем заменяют оптимальными значениями.
В конце этапа 550 оптимизации способ переходит к этапу 560, на котором устройство 104 для генерирования плановой схемы использует устройство 112 для вычисления траектории для генерирования соответствующей траектории и для проверки того, что спрогнозированная траектория полностью закрытого описания плановой схемы поведения воздушного судна удовлетворяет всем ограничивающим условиям, заданным посредством модели 106 функционального контекста, модели 105 пользовательских предпочтений, модели 118 технических характеристик воздушного судна и плановой схемы 101 полета.
Если удовлетворены все ограничивающие условия, то способ заканчивается на этапе 570, на котором выдают полностью закрытое описание 123 плановой схемы поведения воздушного судна и/или выдают описание соответствующей траектории 122. Если обнаружено, что не удовлетворяются какие-либо ограничивающие условия, то способ возвращается к этапу 540, на котором получают исходное улучшенное описание плановой схемы полета, сформированное на этапе 530, а устройство 104 для генерирования плановой схемы использует альтернативную стратегию для вычисления примеров открытой плановой схемы поведения воздушного судна путем вставки совокупностей. Способ затем продолжается как и ранее с этапов 550 и 560.
В попытке обнаружить решение может быть выполнено определенное количество итераций цикла. Например, стратегии могут быть ранжированы таким образом, что устройство 104 для генерирования плановой схемы выбирает стратегии поочередно согласно рангу до тех пор, пока не сформировано полностью закрытое описание плановой схемы поведения воздушного судна 114, которое считают удовлетворяющим всем ограничивающим условиям на этапе 560. Если альтернативные стратегии доступны на этапе 540, который отражает описание плановой схемы полета, завершенной для охвата всех степеней свободы, способ может вернуться к этапу 530, на котором альтернативные стратегии выбирают для улучшения описания плановой схемы полета. Способ затем продолжается как и ранее с этапов 540, 550 и 560.
Самопроверку выполняют таким образом, что устройство 104 для генерирования плановой схемы выдат исключение, заявляющее невозможность генерирования полностью закрытого описания 114 плановой схемы поведения воздушного судна на основании исходного описания 101 плановой схемы полета в заданном функциональном контексте. Заявление исключения может быть запущено после того, как были применены все стратегии, после заданного количества итераций или после предварительно заданной временной задержки.
Обзор улучшений плановой схемы полета
На этапе 530 на фиг. 5 устройство 104 для генерирования плановой схемы улучшает описание плановой схемы полета с использованием ограничивающих условий и задач, полученных из любой из модели 105 пользовательских предпочтений, модели 106 функционального контекста и модели 118 технических характеристик воздушного судна. Для выполнения этого, устройство 104 для генерирования плановой схемы идентифицирует ограничивающие условия и задачи из моделей 105, 106 и 118, которые относятся к каждому участку полета, включенному в описании плановой схемы полета (например не все ограничивающие условия, включаемые в функциональный контекст, подходят для применения к конкретному маршруту или ко всем участкам полета или в отношении конкретного пути полета).
Важность ограничивающих условий и задач для участков полета может быть определена с использованием описаний, связанных с данными, хранящимися в модели 105 пользовательских предпочтений, модели 106 функционального контекста и модели 118 технических характеристик воздушного судна. Например, данные могут быть идентифицированы по географическим областям, к которым они применяются, и/или по фазе полета, к которой они применяются. Например, модель 106 функционального контекста может содержать топографическое описание различных областей в воздушном пространстве. Каждая область может иметь описание препятствий, которые необходимо избежать, таких как горы и густонаселенные области. Совокупность данных плановой схемы участка полета, которая будет применяться в пределах этой области, может быть улучшена с использованием соответствующих ограничивающих условий для этой области. В качестве дополнительного примера, модель 106 функционального контекста может содержать описания STAR, которым необходимо следовать по прибытии в аэропорт. Плановая схема полета может указывать на точку маршрута для прибытия в область терминала, так что только описание STAR, относящееся к месту прибытия, было бы релевантным и, поэтому, его ограничивающие условия могут быть добавлены к примерам совокупности данных плановой схемы участка полета соответствующих участков полета.
Согласно модели 105 пользовательских предпочтений, она может содержать предпочтения авиакомпании, относящиеся к различным фазам полета или различным типам воздушных судов. Например, она может задавать то, что во время взлета и набора высоты воздушное судно летит для минимизации потребления топлива. В альтернативном варианте модель 105 пользовательских предпочтений может задавать то, что во время снижения воздушное судно удерживают на максимально возможной высоте настолько долго, насколько это возможно. Будет понятно, что соответствующие участки полета, относящиеся к фазе полета снижения, могут затем иметь соответствующую задачу, состоящую в поддержании максимальной высоты.
Модель 118 технических характеристик воздушного судна может содержать предпочтения и ограничения, относящиеся к различным частям полета. Например, максимальные скорости выпуска шасси будут относиться только к фазам взлета и приземления.
Устройство 104 для генерирования плановой схемы улучшает описание плановой схемы полета путем расширения совокупностей данных плановых схем участков полета для добавления родственных ограничивающих условий и задач к соответствующим примерам плановой схемы полета или в качестве новых примеров плановой схемы полета согласно синтаксическим и лексическим правилам, задаваемым посредством языка описания плановой схемы полета. Выходные данные этапа 530 представляют собой улучшенное описание плановой схемы полета, которое содержит совокупности данных плановых схем участков полета, содержащие примеры открытой плановой схемы поведения воздушного судна, которая может или не может быть улучшена с использованием ограничивающих условий и задач.
Улучшение плановой схемы полета описано более подробно в приведенном далее описании.
Генерирование параметрического описания плановой схемы поведения воздушного судна
На этапе 540 устройство 104 для генерирования плановой схемы охватывает любые открытые степени свободы в совокупностях данных плановых схем участков полета. Таким образом, улучшенное описание плановой схемы полета, которое все еще может содержать открытые степени свободы, завершено для обеспечения того, что все степени свободы перемещения и конфигурации охвачены для всех совокупностей данных плановых схем участков полета. На данной стадии параметрические диапазоны могут быть использованы для охвата степеней свободы, так что образовано параметрическое описание плановой схемы поведения воздушного судна. Оно содержит информацию по всем степеням свободы, однако не содержит конкретные значения параметров, так что параметрическое описание плановой схемы поведения воздушного судна не задает уникальную траекторию.
На фиг. 6 показано то, как улучшенное описание плановой схемы полета может быть завершено для формирования параметрического описания плановой схемы поведения воздушного судна. Процесс начинается с этапа 610, на котором выбирают первый участок полета. Участки полета могут быть расположены в любом порядке, хотя расположение участков полета в хронологическом порядке представляет собой наглядный пример. Порядок по существу необходим для обеспечения перечня участков полета, которые могут быть последовательно обработаны.
После того, как на этапе 610 был выбран первый участок полета, процесс продолжается в установленном порядке, указанном в 620 на фиг. 6. Установленный порядок 620 последовательно повторяют для каждого участка полета, как будет описано далее.
На этапе 630 проверяют совокупность данных плановой схемы участка полета для выбранного участка полета с тем, чтобы увидеть, оставляют ли примеры открытой плановой схемы поведения воздушного судна, которую они содержат, открытыми любые степени свободы. Если охвачены все степени свободы, то способ продолжается с этапа 615, на котором выбирают следующий участок полета, а процесс еще раз переходит к установленному порядку 620. Если на этапе 630 обнаружены одна или большее количество открытых степеней свободы, то участок полета продолжается посредством процедуры 620 для дополнительной обработки.
Затем, на этапе 640 получают совокупность данных плановой схемы участка полета и любые ограничивающие условия, относящиеся к текущему участку полета. Эти данные используют на этапе 650 для выбора надлежащей стратегии для завершения открытых степеней свободы. Это может быть выполнено путем проверки того, какие степени или степени свободы обязательно должны быть охвачены. Например, открытые степени могут относиться к вертикальному профилю полета или могут относиться к конфигурации шасси. Устройство 104 для генерирования плановой схемы имеет в своем распоряжении стратегии, соответствующие шаблонам для охвата конкретных степеней свободы. Эти стратегии связаны для идентификации того, к каким степеням свободы они относятся. Совокупности могут быть также сохранены и связаны со стратегией, готовой к выбору устройством 104 для генерирования плановой схемы и вставке в совокупность данных плановой схемы участка полета.
Далее приведены примеры стратегий и соответствующих совокупностей: геометрические пути, обеспечивающие различные совокупности боковых путей для задания различных форм пути (например, правый поворот, левый поворот, последовательность поворотов), уровень полета, набор высоты или снижение под постоянным путевым углом, набор высоты или снижение с постоянной скоростью, обычный набор высоты или обычное снижение, набор высоты CAS-MACH, снижение MACH-CAS, проверенный уровень ускорения или замедления, конфигурация с убранной механизацией (например, шасси, устройства обеспечения высокой подъемной силы и тормоза), плановые настройки конфигурации (например, выдвинутое шасси и расширение устройств обеспечения высокой подъемной силы для приземления).
Стратегии могут быть также связаны для указания на то, какую фазу полета они применяют (например, взлет, набор высоты, рейс, снижение, заход на посадку, приземление, выруливание). Ограничивающие условия также используют в определении того, какая стратегия должна быть выбрана. Согласно приведенному выше примеру, ограничивающее условие может уточнить область ограниченного воздушного пространства, которая расположена рядом, что обеспечивает управление стратегией, выбранной для того, чтобы убедиться в том, что поворот выполняют в надлежащем месте для предотвращения возникновения ограниченного пространства.
Эвристические правила могут также быть использованы при выборе стратегии. Например, участок полета может не охватывать вертикальный профиль. Устройство 104 для генерирования плановой схемы может вернуться обратно к совокупностям данных плановых схем участков полета для более ранних участков полета для обнаружения последней точно определенной высоты и может затем сканировать для обнаружения следующего участка полета, который точно определяет высоту. Сравнение двух высот может затем управлять выбором подходящей стратегии. Например, если два участка полета точно определяют ту же самую высоту, то промежуточные участки полета, которые не определяют точно высоту, могут быть изменены с использованием стратегии, которая поддерживает уровень полета.
После того, как на этапе 650 была выбрана подходящая стратегия, процедура 620 продолжается с этапа 660, на котором плановая схема поведения воздушного судна, первоначально соответствующая выбранной стратегии, сгенерирована и добавлена к совокупности данных плановой схемы участка полета. Основной элемент может быть добавлен как часть совокупности, в которой должны быть объединены два или большее количество основных элементов, то есть стратегия может требовать основного элемента или совокупности из основных элементов для описания необходимых инструкций в зависимости от сложности стратегии.
При необходимости, выполняют этапы 650 и 660 для обеспечения того, что в совокупности данных плановой схемы участка полета охвачены все открытые степени свободы. По завершению обработки, на этапе 670 выполняют проверку для того, чтобы увидеть, представляет ли собой обрабатываемый часток полета окончательный участок полета. Если нет, то процесс возвращается обратно к этапу 615, на котором выбирают следующий участок полета, и еще раз переходят к процедуре 620.
Когда все участки полета были обработаны, как определено на этапе 670, процесс продолжается с этапа 680, на котором все совокупности данных по завершенным плановых схемам участков полета сравнивают для формирования параметрического описания плановой схемы поведения воздушного судна, выраженного с использованием формализованного языка (язык описания плановой схемы поведения воздушного судна). Это завершает этап 540 по фиг. 5. Параметрическую плановую схему поведения воздушного судна затем обрабатывают согласно этапу 550, на котором параметрические диапазоны разложены на конкретные значения параметров посредством процесса оптимизации, который будет описан согласно фиг. 7.
Оптимизация параметрического описания плановой схемы поведения воздушного судна
Процесс оптимизации этапа 550 учитывает все диапазоны параметров, указанные в параметрическом описании плановой схемы поведения воздушного судна и расчитывает оптимальные значения для каждого параметра путем оптимизации общей оценочной функции, которая отражает задачи, заданные в примерах плановой схемы полета.
Как показано на фиг. 7, процесс начинается на этапе 710, на котором выбирают первый участок полета. Как описано выше, участки полета могут быть упорядочены любым способом, который обеспечивает перечень участков полета для обеспечения последовательной обработки.
На этапе 720, совокупность данных плановой схемы участка полета рассматривают для определения того, содержит ли она любое количество примеров параметрической плановой схемы поведения воздушного судна, так что совокупность данных содержит диапазоны параметров, которые необходимо разложить. Если отсутствует параметрическая плановая схема, то способ переходит к этапу 725, на котором выбирают следующий участок полета для обеспечения обработки. Когда на этапе 710 обнаружена совокупность данных плановой схемы участка полета для задания одного или большего количества диапазонов параметров, то получают этот диапазон параметров и любые соответствующие задачи и сохраняют их в соответствующих перечнях, как показано на этапе 730. Затем, на этапе 740 выполняют проверку с тем, чтобы увидеть, представляет ли участок полета, обрабатываемый в настоящее время, собой окончательный участок полета. Если нет, то процесс возвращается обратно к этапу 725 таким образом, что следующий участок полета может быть выбран для обработки на этапе 720 еще раз. Таким образом, совокупности данных плановых схем участков полета всех участков полета проверяют для диапазонов параметров и проверяют перечни, которые сопоставляют диапазоны параметров, которые необходимо разложить, вместе с соответствующими задачами.
На этапе 750, задачи, сохраненные в соответствующем перечне, математически объединяют в оценочную функцию, которая отражает задачи. Задачи могут быть сохранены в модели 105 пользовательских предпочтений в качестве математической функции, выражающей задачу, которая должна быть поставлена. Затем, формирование оценочной функции может соответствовать объединению отдельных математических функций, описывающих каждую задачу. Математические функции могут быть объединены каким-либо прямым образом. Например, может быть сформирована взвешенная комбинация, причем веса присвоены каждой задаче согласно ее важности. Данные могут быть сохранены в модели 105 пользовательских предпочтений для указания на относительную важность задачи.
Если обнаружен диапазон параметра, который не имеет соответствующей задачи, то библиотека предварительно заданных математических функций могут быть использована для обеспечения включения математической функции в оценочную функцию. Например, математическая функция может быть связана с диапазоном параметра, который присваивает постоянное значение, независящее от выбранного значения параметра, так что указанное значение параметра может быть выбрано любым в пределах диапазона параметра, но оптимизировано с тем, чтобы привести к общему улучшению значения оценочной функции. Например, выбор конкретного значения параметра может способствовать решению задачи, относящейся к предыдущему участку полета.
Следовательно, оценочная функция поощряет то, насколько хорошо удовлетворяются задачи, и подвергает порицанию то, насколько плохо удовлетворяются указанные задачи.
На этапе 760 считывают каждый диапазон параметра в соответствующем перечне, а соответствующий пример плановой схемы поведения воздушного судна, который возникает в параметрическом описании плановой схемы поведения воздушного судна, изменяют таким образом, что диапазон параметров заменяют значением, выходящим за пределы диапазона. Различные схемы могут быть использованы для выбора значения, например путем выбора максимального значения, минимального, среднего значения или путем произвольного генерирования значения. В конце этапа 760 описание плановой схемы поведения воздушного судна приводит к тому, что оно имеет все заданные параметры при отсутствии оставшихся диапазонов параметров. Данную модель описания плановой схемы поведения воздушного судна затем тестируют путем использования устройства 112 для вычисления траектории для рассчета соответствующей траектории, из которой устройство 104 для генерирования плановой схемы может рассчитать значение оценочной функции для модели описания плановой схемы поведения воздушного судна.
Процесс затем переходит к этапу 780, на котором оптимизируют модель описания плановой схемы поведения воздушного судна. Данный процесс оптимизации улучшает значения параметров итерационным образом. То есть, устройство 104 для генерирования плановой схемы выполняет итерации произвольного изменения некоторых или всех значений параметров, что обеспечивает последующий вызов устройства 112 для вычисления траектории для вычисления новой траектории и вычисления нового значения оценочной функции, и определения того, была ли она улучшена. Таким образом, значения параметров выделяют способом, который оптимизирует оценочную функцию. Это может быть выполнено с использованием любой известной технологии, например с использованием эволюционных алгоритмов, таких как генетические алгоритмы, или через линейную оптимизацию. Эти технологии обеспечивают оптимизированное полностью закрытое описание плановой схемы поведения воздушного судна, и его выдают на этапе 790 в качестве выходных данных.
Улучшение плановой схемы полета и генерирование плановой схемы поведения воздушного судна
На фиг. 8-10 будет описан способ генерирования плановой схемы поведения воздушного судна, который обеспечивает использование конкретного способа улучшения плановой схемы полета.
На фиг. 8 показано, что этап 530 улучшения плановой схемы полета по фиг. 5 разбит на три последовательные стадии. Во-первых, как показано в 532, описание плановой схемы полета улучшают с использованием модели 105 пользовательских предпочтений. Затем, как показано в 534, описание плановой схемы полета улучшают с использованием модели 106 функционального контекста. В итоге, как показано в 536, описание плановой схемы полета улучшают с использованием модели 118 технических характеристик воздушного судна.
На фиг. 9 представляет собой адаптацию фиг. 5, на которой показано то, как трех-стадийное улучшение может быть использовано во всем способе генерирования полностью закрытого описания 123 плановой схемы поведения воздушного судна. Фиг. 10 представляет собой адаптацию фиг. 2 для отображения того, как вся система может быть использована для выполнения способа по фиг. 9.
На фиг. 10 показано устройство 104 для генерирования плановой схемы, разделенное на четыре компонента 104A-D. Эти компоненты могут соответствовать отдельным компьютерным процессорам, запрограммированным с использованием модулей программного обеспечения, обеспечивающих необходимые функциональные возможности. В альтернативном варианте один компьютерный процессор может обеспечить наличие двух или большего количества, или даже всех, из четырех устройств 104A-D. Например, четыре устройства 104A-D могут соответствовать четырем модулям программного обеспечения, функционирующих на одном компьютерном процессоре или на сети из компьютерных процессоров.
Устройство 104A для формирования пользовательских предпочтений представляет собой первое устройство для улучшения плановой схемы полета. Устройство 104A для формирования пользовательских предпочтений использует модель 105 пользовательских предпочтений для улучшения плановой схемы полета и для создания в качестве выходных данных единожды улучшенное описание 152 плановой схемы полета. Данное улучшение, использующее модель 105 пользовательских предпочтений, выполняют так, как описано ранее.
Единожды улучшенное описание 152 плановой схемы полета передают на устройство 104 В для формирования функционального контекста, которое использует модель 106 функционального контекста для улучшения описания 152 плановой схемы полета, что обеспечивает создание дважды улучшенного описания 154 плановой схемы полета. Улучшение описания 152 плановой схемы полета с использованием модели 106 функционального контекста выполняют так, как описано ранее.
Дважды улучшенное описание 154 плановой схемы полета передают на устройство 104C для генерирования технических характеристик воздушного судна, которое использует модель 118 технических характеристик воздушного судна для еще одного дополнительного улучшения описания 154 плановой схемы полета, что обеспечивает создание трижды улучшенного описания 156 плановой схемы полета. Улучшение описания 154 плановой схемы полета с использованием модели 118 технических характеристик воздушного судна выполняют так, как описано ранее. В данном варианте реализации модель 118 технических характеристик воздушного судна представляет собой часть инфраструктуры 103 для генерирования плановой схемы (по сравнению с фиг. 2, на которой модель 118 технических характеристик воздушного судна представляет собой часть инфраструктуры 110 для вычисления траектории). Как можно увидеть на фиг. 10, модель 105 пользовательских предпочтений, модель 106 функционального контекста и модель 118 технических характеристик воздушного судна могут передавать данные на устройство 112 для вычисления траектории инфраструктуры 110 для вычисления траектории.
Основное устройство 104D для генерирования плановой схемы принимает трижды улучшенное описание 156 плановой схемы полета и завершает примеры открытой плановой схемы поведения воздушного судна в совокупностях данных плановых схем участков полета путем добавления примеров плановой схемы поведения воздушного судна для охвата всех степеней свободы и, таким образом, генерирует параметрическое описание плановой схемы поведения воздушного судна, как описано ранее по отношению к этапу 540 по фиг. 5. Основное устройство 104D для генерирования плановой схемы также оптимизирует параметрическую плановую схему поведения воздушного судна для создания полностью закрытого описания 114 плановой схемы поведения воздушного судна, как описано ранее по отношению к этапу 550 по фиг. 5.
Полностью закрытое описание 114 плановой схемы поведения воздушного судна передают на устройство 112 для вычисления траектории для обеспечения возможности расчета соответствующей траектории. Устройство 112 для вычисления траектории также использует модель 120 Земли при расчете траектории и может также запрашивать данные из любой из модели 105 пользовательских предпочтений, модели 106 функционального контекста и модели 118 технических характеристик воздушного судна. Устройство 112 для вычисления траектории выдает в качестве выходных данных описание вычисленной траектории 122 и описание полностью закрытого описания 123 плановой схемы поведения воздушного судна, как уже было описано согласно фиг. 2.
На фиг. 10 также указано, что полностью закрытое описание 123 плановой схемы поведения воздушного судна может быть передано обратно на основное устройство 104D для генерирования плановой схемы, устройство 104B для формирования функционального контекста и устройство 104A для формирования пользовательских предпочтений, как будет описано согласно фиг. 9.
На фиг. 9 показан способ генерирования описания 123 плановой схемы поведения воздушного судна согласно варианту реализации настоящего изобретения. Многие этапы представляют собой этапы, уже описанные согласно фиг. 5 и, таким образом, они были заданы с соответствующими ссылочными номерами и только выделены в приведенном далее описании.
На этапе 510 запускают инфраструктуру 103 для генерирования плановой схемы. На этапе 520 принимают, посредством инфраструктуры 103 для генерирования плановой схемы, описание 101 плановой схемы полета и описание 102 исходных условий и анализируют его для создания совокупностей данных плановых схем участков полета. Каждая совокупность данных содержит один или большее количество примеров открытой плановой схемы поведения воздушного судна, причем каждый пример открытой плановой схемы поведения воздушного судна обеспечивает информацию, относящуюся к некоторому аспекту полета в пределах участка полета, который будет воздействовать на одну или большее количество степеней свободы перемещения и/или конфигурации. Данный анализ может быть выполнен посредством устройства 104A для формирования пользовательских предпочтений. Однако, в данном варианте реализации отдельное устройство (не показано) обеспечено в качестве части инфраструктуры 103 для генерирования плановой схемы для этой цели.
На этапе 530, устройства 104A-D для генерирования плановых схем улучшают проанализированную плановую схему полета с использованием модели 105 пользовательских предпочтений, модели 106 функционального контекста и модели 118 технических характеристик воздушного судна. Идентифицируют ограничивающие условия и задачи из моделей 105, 106 и 118, которые относятся к совокупностям данных плановых схем участков полета (например не все ограничивающие условия, включенные в функциональный контекст, подходят для применения к конкретному маршруту или ко всем участкам полета или в отношении конкретного пути полета). Устройства 104A-D для генерирования плановых схем улучшают плановую схему полета путем расширения совокупности данных для добавления родственных ограничивающих условий и задач к примерам плановой схемы полета согласно синтаксическим и лексическим правилам, составленным посредством языка описания плановой схемы полета.
Во-первых, на этапе 532 проанализированную плановую схему полета выдают на устройство 104A для формирования пользовательских предпочтений таким образом, что она может быть преобразована в единожды улучшенное описание 152 плановой схемы полета. Устройство 104A для формирования пользовательских предпочтений имеет в своем распоряжении совокупность стратегий и эвристических правил для обеспечения возможности преобразования им описания плановой схемы полета в единожды улучшенное описание 152 плановой схемы полета путем добавления задач и ограничений к совокупностям данных плановых схем участков полета, которые относятся к участкам полета.
Во-вторых, на этапе 534, единожды улучшенное описание 152 плановой схемы полета выдают на устройство 104 В для формирования функционального контекста. Устройство 104 В для формирования функционального контекста имеет в своем распоряжении совокупность стратегий и эвристических правил для обеспечения возможности преобразования им единожды улучшенного описания 152 плановой схемы полета в дважды улучшенное описание 154 плановой схемы полета. Устройство 104B для формирования функционального контекста добавляет задачи и ограничивающие условия, которые относятся к участкам полета, включающим участки полета, уже содержащие ограничивающие условия и задачи, добавленные посредством устройства 104A для формирования пользовательских предпочтений. Таким образом, устройство 104B для формирования функционального контекста стремится улучшить дополнительные участки полета, уже улучшенные устройством 104A для формирования пользовательских предпочтений. Например, устройство 104A для формирования пользовательских предпочтений может добавлять задачу, относящуюся к предпочтительному маршруту (показан для того, чтобы следовать маршруту, который обеспечивает заход на посадку с юга в конкретный аэропорт), а устройство 104B для формирования функционального контекста может добавлять родственное ограничивающее условие (показано для задания STAR, которому должно следовать воздушной судно, заходящее на посадку в аэропорту с юга).
В-третьих, на этапе 536 дважды улучшенное описание 154 плановой схемы полета выдают на устройство 104C для генерирования технических характеристик воздушного судна. Устройство 104C для генерирования технических характеристик воздушного судна имеет в своем распоряжении совокупность стратегий и эвристических правил для обеспечения возможности преобразования им дважды улучшенного описания 154 плановой схемы полета в трижды улучшенное описание 156 плановой схемы полета. Устройство 104C для генерирования технических характеристик воздушного судна добавляет задачи и ограничивающие условия, которые относятся к участкам полета, включающим участки полета, уже содержащие ограничивающие условия и задачи, добавленные посредством устройства 104A для формирования пользовательских предпочтений и/или устройства 104B для формирования функционального контекста. Согласно приведенному выше примеру, устройство 104C для генерирования технических характеристик воздушного судна может добавлять ограничивающие условия для STAR, соответствующие скорости выпуска закрылков и скорости выспуска шасси.
Трижды улучшенное описание 156 плановой схемы полета затем передают на основное устройство 104D для генерирования плановой схемы, где на этапе 540 устройство 104D идентифицирует совокупности данных плановых схем участков полета трижды улучшенного описания плановой схемы полета, имеющей открытые степени свободы. Основное устройство 104D для генерирования плановой схемы заполняет эти совокупности данных примерами плановой схемы поведения воздушного судна для охвата всех степеней свободы. Этим процессом управляют посредством нескольких стратегий завершения, как пояснено ранее согласно фиг. 5 и фиг. 6. Затем, на этапе 550 основное устройство 104D для генерирования плановой схемы оптимизирует параметрическое описание плановой схемы поведения воздушного судна. Данный процесс оптимизации 550 учитывает все диапазоны параметров, указанные в параметрическом описании плановой схемы поведения воздушного судна, и расчитывает оптимальные значения для каждого параметра путем оптимизации общей оценочной функции, как описано ранее по фиг. 5 и 7.
Способ переходит к этапу 560, на котором основное устройство 104D для генерирования плановой схемы использует устройство 112 для вычисления траектории для генерирования соответствующей траектории и для проверки того, что спрогнозированная траектория для каждой модели описания плановой схемы поведения воздушного судна удовлетворяет всем ограничивающим условиям, заданным посредством модели 106 функционального контекста, модели 105 пользовательских предпочтений, модели 118 технических характеристик воздушного судна и исходного описания 101 плановой схемы полета.
Если удовлетворены все ограничивающие условия, то способ завершается на этапе 570, на котором выдают описание завершенной полностью закрытой плановой схемы 123 поведения воздушного судна и/или выдают описание соответствующей траектории 122. Если обнаружено, что не удовлетворены какие либо ограничивающие условия, то способ будет повторят конкретные этапы с тем, чтобы попытаться обнаружить полностью закрытое описание плановой схемы поведения воздушного судна, которое удовлетворяет всем ограничивающим условиям.
В предусмотренных вариантах реализации первый примененный способ состоит в повторении этапа 550 оптимизации с использованием альтернативных стратегий оптимизации. Однако, в данном варианте реализации первый примененный способ состоит в повторении этапа 540 завершения с использованием альтернативных стратегий (он представлял бы собой второй применяемый способ, если альтернативные стратегии оптимизации были бы применены в качестве первого способа). То есть, способ продолжается с этапа 541, на котором основное устройство 104D для генерирования плановой схемы определяет то, все ли стратегии завершения были применены. Если нет, то способ продолжается с этапа 542, на котором выбирают новую стратегию завершения, а затем повторяют этапы 540-560 способа. То есть, трижды улучшенное описание 156 плановой схемы полета получают и завершают с использованием новой стратегии, на этапе 550 оптимизируют результирующее параметрическое описание плановой схемы поведения воздушного судна, а затем на этапе 560 повторяют проверку того, удовлетворены ли все ограничивающие условия.
Способ возвращается к этапу 540, на котором получают исходное улучшенное описание плановой схемы полета, сформированное на этапе 530, а устройство 104 для генерирования плановой схемы использует альтернативную стратегию для вычисления описания плановой схемы полета путем вставки примеров плановой схемы поведения воздушного судна для охвата всех степеней свободы. Способ затем продолжается как и ранее с этапов 550 и 560.
Если на этапе 541 обнаруживают, что все стартегии завершения были применены, то затем способ продолжается с этапа 543. На этапе 543 устройство 104 В для формирования функционального контекста определяет, были ли применены все стратегии, доступные устройству 104B для формирования функционального контекста. Если нет, то способ продолжается с этапа 544, на котором устройство 104B для формирования функционального контекста выбирает неиспытанную стратегию. Затем повторяют этапы 534, 536, 540, 550 и 560. Кроме того, цикл с этапов 541 и 542 повторяют таким образом, что различные стратегии завершения используют в попытках обеспечения плановой схемы 114 поведения воздушного судна, которая удовлетворяет всем ограничивающим условиям. Таким образом, способ совершает цикл посредством различных стратегий в устройстве 104B для формирования функционального контекста, причем указанные различные стратегии завершения применяют для каждой из стратегий устройства для формирования функционального контекста. Если этого недостаточно, то затем на этапе 543 будет возникать отрицательный ответ. То есть, на этапе 543 устройство 104B для формирования функционального контекста будет определять, были ли выполнены все из его стратегий.
В данном случае способ продолжается с этапа 545, на котором устройство 104A для формирования пользовательских предпочтений применяет различные стратегии. Во-первых, на этапе 545 проверку выполняют для того, чтобы убедиться в том, что были применены все стратегии, доступные устройству 104A для формирования пользовательских предпочтений. Если были применены все стратегии, то способ завершается на этапе 547, на котором сообщается, что не могло быть обнаружено какой-либо плановой схемы поведения воздушного судна, которая удовлетворяет всем ограничивающим условиям. Если устройство 104A для формирования пользовательских предпочтений определяет, что не все из его стратегий были применены, то оно переходит к этапу 546, на котором выбирают неиспытанную стратегию.
Затем повторяют этапы 532, 534, 536, 540, 550 и 560. Кроме того, цикл с этапов 541 и 542 и цикл с этапов 543 и 544 повторяют таким образом, что различные стратегии устройства для формирования функционального контекста и различные стратегии завершения используют в попытках обеспечения плановой схемы 114 поведения воздушного судна, которая удовлетворяет всем ограничивающим условиям. Таким образом, способ совершает цикл посредством различных стратегий в основном устройстве 104D для генерирования плановой схемы, устройстве 104B для формирования функционального контекста и устройстве 104A для формирования пользовательских предпочтений для обнаружения плановой схемы 114 поведения воздушного судна, которая удовлетворяет всем ограничивающим условиям.
Порядок, в котором испытывают альтернативные стратегии, определяет приоритеты ограничивающим условиям и задачам, хранящимся в модели 105 пользовательских предпочтений. То есть, изменения, выполняемые при использовании устройства 104A для формирования пользовательских предпочтений, выполняют последними после того, как были применены все другие сочетания стратегий устройства для формирования функционального контекста и стратегии завершения. Затем задают приоритет для ограничивающих условий и задач, хранящихся в модели 106 функционального контекста. То есть, все доступные стратегии завершения применяют до того, как были выполнены изменения в отношении стратегий устройства для формирования функционального контекста.
Пример захода на посадку в аэропорту
Пример приведенных выше способов будет описан согласно фиг. 11-14. В данном примере воздушное судно 810 заходит на посадку в аэропорт для приземления на посадочной полосе 820. Плановая схема полета может по существу указывать, что воздушное судно должно приземлиться на посадочной полосе 820 после прибытия в точку маршрута ALPHA.
Для обеспечения полностью закрытого описания 114 плановой схемы поведения воздушного судна, устройство 104 для генерирования плановой схемы может расширить эту основную плановую схему полета с использованием информации, полученной из модели 106 функционального контекста, описывающей процедуру STAR, которой необходимо следовать при заходе на посадку в аэропорту. Например, устройство 104 для генерирования плановой схемы может установить направление ветра, определить направление захода на посадку при встречном ветре на посадочную полосу 820 и извлечь процедуру STAR для такого приземления воздушного судна, находящегося в точке маршрута ALPHA.
Процедура STAR будет соответствовать совокупности ограничений. В данном примере боковой путь, которым необходимо следовать, направляет воздушное судно через точки маршрута ALPHA, BETA, GAMMA и DELTA, готовые для прямого захода на посадку на посадочную полосу 820. Эти точки маршрута показаны на фиг. 11. Процедура STAR может также содержать ограничения в отношении скоростей вдоль маршрута, а также высоты, которую необходимо поддерживать в каждой точке маршрута. Эти высоты показаны на фиг. 12.
В точке маршрута ALPHA задан широкий допустимый диапазон высоты, как указано в 910. Меньшие диапазоны высот заданы для точек маршрута BETA и GAMMA, как показано соответственно в 920 и 930. Конкретная высота задана для точки маршрута DELTA, как показано в 940, что соответствует начальной высоте для захода на посадку, откуда может быть пересечен угол глиссады.
Устройство 104 для генерирования плановой схемы может использовать эти ограничения для расширения плановой схемы полета. Например, дополнительные участки полета могут быть созданы согласно участкам между точками маршрута, которым необходимо следовать. Кроме того, может быть создана параметрическая плановая схема поведения воздушного судна, где диапазоны высот в каждой точке маршрута заданы без обеспечения конкретной высоты. Задачи могут быть использованы для указазания высоты, которой необходимо соответствовать, как описано далее.
На фиг. 13 показаны два альтернативных вертикальных профиля 810a и 810b. Профиль 810a соответствует воздушному судну 810, управляемому авиакомпанией, которая предпочитает летать настолько высоко, насколько это возможно, и так долго, насколько это возможно. Данная задача будет записана в модели 105 пользовательских предпочтений. Соответственно, устройство 104 для генерирования плановой схемы задает высоту в каждой точке маршрута в качестве точно определенного максимума, затем расчитывает максимально возможную скорость снижения для воздушного судна 810 для установления того, когда обязательно должна начинаться каждая фаза снижения, и создает участки, которые задают уровень полета между каждой фазой снижения, вместе с заданием вершины точки снижения (TOD2). Таким образом, путем использования задачи, устройство 104 для генерирования плановой схемы генерирует плановую схему поведения воздушного судна, которая будет создавать нисходящий вертикальный профиль, показанный в 810a. Данный профиль показывает, что воздушное судно 810 летит настолько высоко, насколько возможно, и так долго, насколько это возможно, до выполнения крутого снижения строго по графику для соблюдения конкретной высоты, заданной для каждой точки маршрута.
Другой авиакомпании может не нравиться такой заход на посадку, который показывает, что воздушное судно несколько раз увеличивает скорость между уровнем полета и снижениями. Данная вторая авиакомпания может предпочитать летать с равномерным непрерывным снижением с минимальными изменениями в путевом угле полета. Данный заход на посадку может быть отражен в качестве задачи, сохраненной в модели 105 пользовательских предпочтений. Устройство 104 для генерирования плановой схемы может получать эту задачу и определять вертикальный профиль, показанный в качестве 810b на фиг. 13. Этот вертикальный профиль показывает равномерное снижение с постоянным путевым углом полета от рассчитанного верхнего значения точки снижения TOD1, которая проходит через все необходимые диапазоны высоты.
Как можно увидеть из фиг. 13, может быть выполнено некоторое изменение в путевом угле полета с одновременным обеспечением того, что соблюдаются ограничения по высоте. Дополнительные задачи могут управлять окончательным выбором вертикального профиля. Например, авиакомпания может иметь дополнительную задачу, состоящую в заходе на посадку с непрерывным снижением при полете с использованием совокупности регуляторов для работы на малых оборотах и с минимальным выпуском тормоза. Данная задача может затем быть использована устройством 104 для генерирования плановой схемы для задания подходящего путевого угла полета.
Задачи по полету под постоянным путевым углом полета во время снижения и по заходу на посадку с непрерывным снижением при полете на малых оборотах дополняют друг друга в том, что они обе воздуйствуют на вертикальный профиль. Время от времени, эти задачи будут вызывать конфликтную ситуацию, состоящую в то, что они обе не могут быть выполнены. Для предотвращения этого, для задач могут быть определены приоритеты таким образом, что устройство 104 для генерирования плановой схемы может определять, какая задача должа быть выполнена там, где возникают конфликтные ситуации.
Авиакомпания может хранить ограничения, а также задачи, в модели 105 пользовательских предпочтений. Например, как пояснено выше, поперечный профиль задан частично посредством точек маршрута, указанных в описании STAR в модели 106 функционального контекста. Однако, эти ограничения оставляют открытым то, как воздушное судно 810 выполняет изменения направления для соблюдения бокового положения каждой из точек маршрута ALPHA, BETA, GAMMA и DELTA. Авиакомпания может также задавать ограничения, например не превышать конкретного угла крена для обеспечения преимущества в комфорте пассажира. Устройство 104 для генерирования плановой схемы может извлекать данную задачу из модели 105 пользовательских предпочтений во время этапа 530 улучшения плановой схемы полета. На этапе 550 данное ограничение может быть использовано для задания диапазона параметра для угла крена, который затем оптимизируют на этапе 560.
Планируемые применения
Настоящее изобретение может выделить выгоду от любого применения, которому необходимо прогнозирование траектории воздушного судна. Например, инфраструктура 110 для вычисления траектории может быть реализована в качестве части системы управления полетом воздушного судна. Система управления полетом может обеспечить использование средств для прогнозирования траектории при определении того, как воздушное судно должно лететь.
Траектория, спрогнозированная как описано в предыдущем параграфе, может быть выдана на управление воздушным движением, похожее на положения подробного плана полета.
Для воздушной инфраструктуры для вычисления траектории, система управления полетом может иметь доступ к некоторой информации, необходимой для генерирования плановой схемы поведения воздушного судна. "Например, предпочтения авиакомпании могут быть сохранены локально для обеспечения их извлечения и использования. Кроме того, модель 118 технических характеристик воздушного судна и модель 120 Земли могут быть сохранены локально и обновлены так, как это необходимо. Дополнительная информация может быть введена пилотом, например конкретный SID, навигационный маршрут и STAR, которым необходимо следовать, а также другие предпочтения, например когда выпустить шасси, изменить настройки закрылок, рабочие характеристики двигателя и т.д. Может быть получена некоторая недостоющая инфорация, например время выпуска закрылок и шасси на основании рекомендованной скорости воздуха.
Вся эта необходимая инфорация может быть получена до полета, так что может быть предсказана траектория всего полета. В альтернативном варианте только некоторая информация может быть получена до полета, а остальная часть может быть получена на маршруте. Данная информация может быть получена (или обновлена, при необходимости) после входных данных пилота, например в ответ на изменение мощности двигателя или уровня полета. Инфраструктура 110 для вычисления траектории может также обновлять спрогнозированную траекторию и, следовательно плановую схему поведения воздушного судна, как выражено в языке описания плановой схемы поведения воздушного судна, вследствие изменений в преодолении атмосферных условий, как обновлено посредством модели 120 Земли. Обновления могут быть переданы посредством других типов известной линии 230 связи между воздушным судном и землей: последние атмосферные условия могут быть отправлены на воздушное судна, а уточненная плановая схема поведения воздушного судна или спрогнозированная траектория может быть отправлена от воздушного судна.
Применения ограничений для управления воздушным движением будут аналогичны вышеописанной воздушной системе. Управление воздушным движением может иметь информацию, необходимую для определения плановой схемы поведения воздушного судна, такой как процедуры полета (SID, STAR и т.д.), информацию, относящуюся к техническим характеристикам воздушного судна (в качестве модели технических характеристик воздушного судна), атмосферные условия (в качестве модели Земли) и возможно даже предпочтения авиакомпании. Некоторая информация, такая как предпочтения пилота, относящаяся, например, к тому, когда изменить конфигурации воздушного судна, может быть собрана перед полетом и во время полета. Когда информация недоступна, управление воздушным движением может сделать допущения для обеспечения генерирования плановой схемы поведения воздушного судна и траектории, которую необходимо предсказать. Например, допущение может быть выполнено таким образом, что все пилоты будут выпускать их шасси десять морских миль от границы посадочной полосы или при конкретной скорости воздуха.
Управление воздушным движением может использовать спрогнозированные траектории воздушного судна для идентификации потенциальных конфликтных ситуаций. Любые потенциальные конфликтные ситуации могут быть решены путем рекомендации одному или большему количеству воздушных судов необходимых изменений в их плановую схему полета и/или плановую схему поведения воздушного судна.
Специалисту в области техники будет очевидно, что изменения могут быть выполнены для вышеописанных вариантов реализации без выхода за пределы объема настоящего изобретения, заданного прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДСКАЗАНИЯ ОПТИМАЛЬНЫХ РЕШЕНИЙ АТАКИ И ОБОРОНЫ В СЦЕНАРИИ ВОЕННОГО КОНФЛИКТА | 2018 |
|
RU2726394C1 |
| СПОСОБ ОЦЕНКИ И АНАЛИЗА ТЕХНИКИ ПИЛОТИРОВАНИЯ ПО ДАННЫМ БОРТОВЫХ УСТРОЙСТВ РЕГИСТРАЦИИ ПАРАМЕТРИЧЕСКОЙ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2016 |
|
RU2628031C1 |
| ФОРМИРОВАНИЕ ПОИСКОВОГО ЗАПРОСА НА ОСНОВЕ КОНТЕКСТА | 2013 |
|
RU2633115C2 |
| СПОСОБ УСТАНОВЛЕНИЯ ПЛАНОВОЙ ТРАЕКТОРИИ ПОЛЕТА ТРАНСПОРТНОГО СРЕДСТВА ВОЗЛЕ ЦЕЛИ (ВАРИАНТЫ), ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2017 |
|
RU2687008C2 |
| СИСТЕМА И ПРОЦЕСС ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ АЭРОДИНАМИЧЕСКИХ ПОВЕРХНОСТЕЙ СИЛОВОГО КРЫЛА | 2006 |
|
RU2405716C2 |
| СБОР ДАННЫХ О ПОЛЬЗОВАТЕЛЬСКОМ ПОВЕДЕНИИ ПРИ ВЕБ-ПОИСКЕ ДЛЯ ПОВЫШЕНИЯ РЕЛЕВАНТНОСТИ ВЕБ-ПОИСКА | 2007 |
|
RU2435212C2 |
| СПОСОБ ПРОВЕДЕНИЯ СБОРА СЕЙСМОРАЗВЕДОЧНЫХ ДАННЫХ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНЫХ ВОЗДУШНЫХ СРЕДСТВ | 2022 |
|
RU2799624C1 |
| СИСТЕМЫ И СПОСОБЫ ОПТИМИЗАЦИИ ОПЕРАЦИЙ ДОБЫЧИ В РЕАЛЬНОМ ВРЕМЕНИ | 2008 |
|
RU2502120C2 |
| СПОСОБ И СИСТЕМА РЕКОМЕНДАЦИЙ КОНТЕНТА НА ОСНОВАНИИ ИНФОРМАЦИИ ПОВЕДЕНИЯ ПОЛЬЗОВАТЕЛЯ | 2016 |
|
RU2701508C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ РАБОТОЙ УСТРОЙСТВА С ИСПОЛЬЗОВАНИЕМ КОМПЛЕКСНОГО МОДЕЛИРОВАНИЯ С ВОЗМОЖНОСТЬЮ ВРЕМЕННОГО СДВИГА | 2008 |
|
RU2481612C2 |
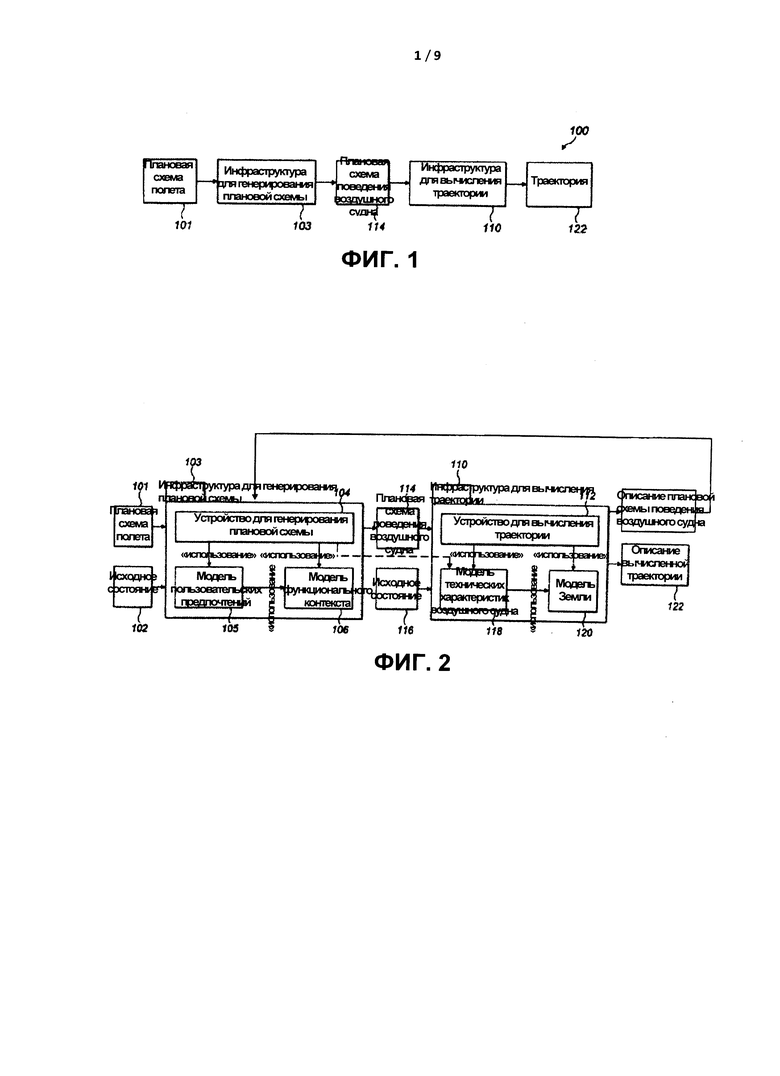
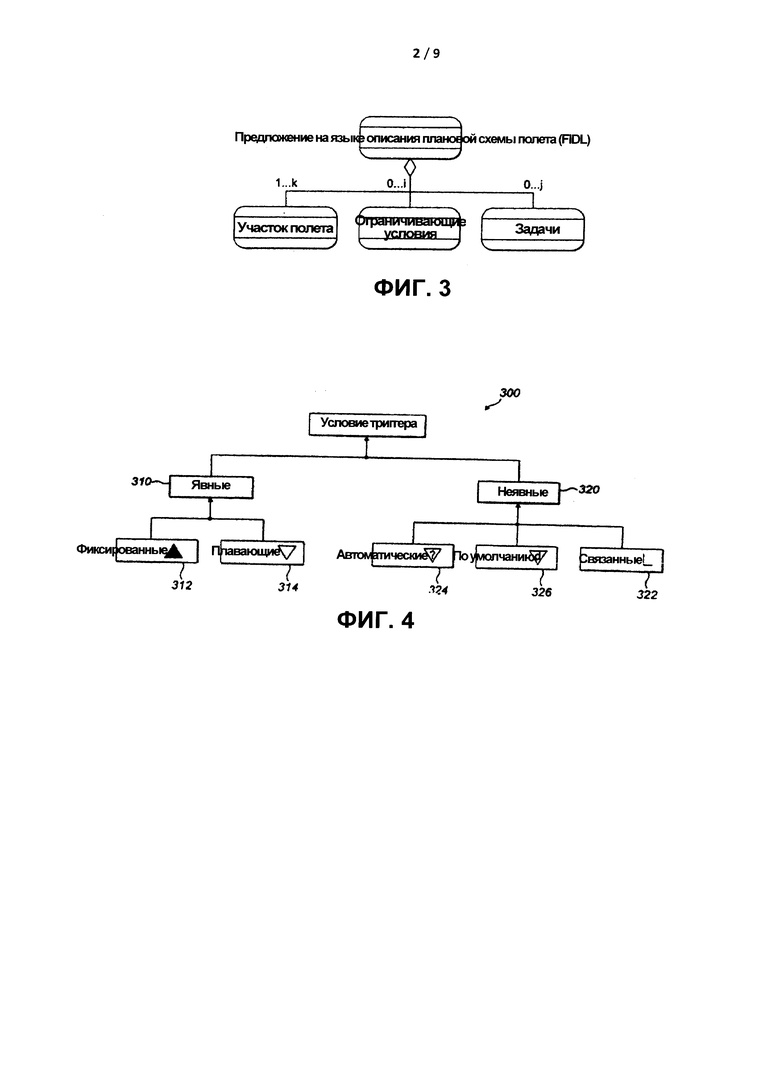
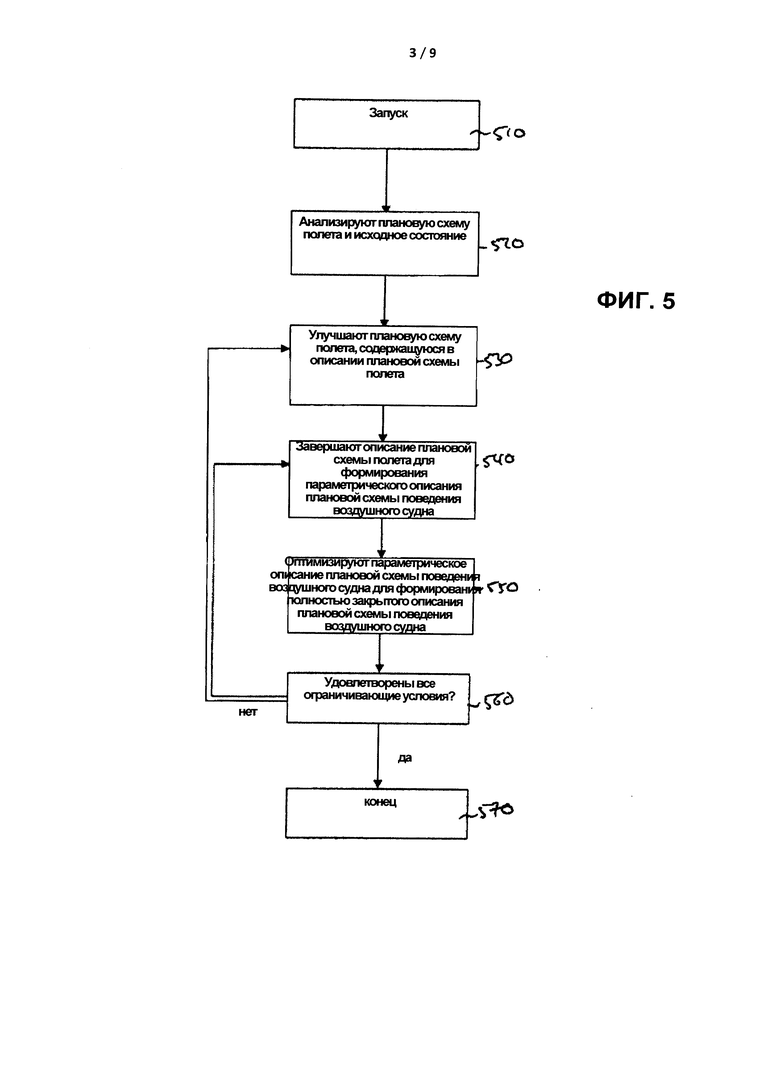
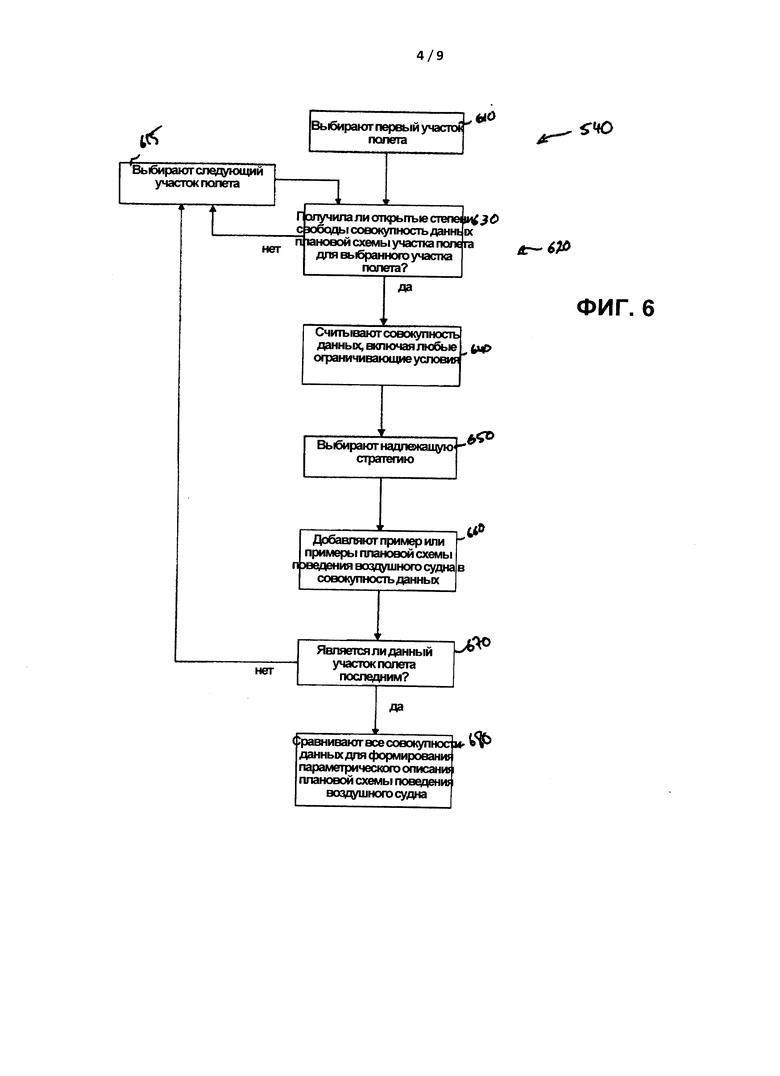
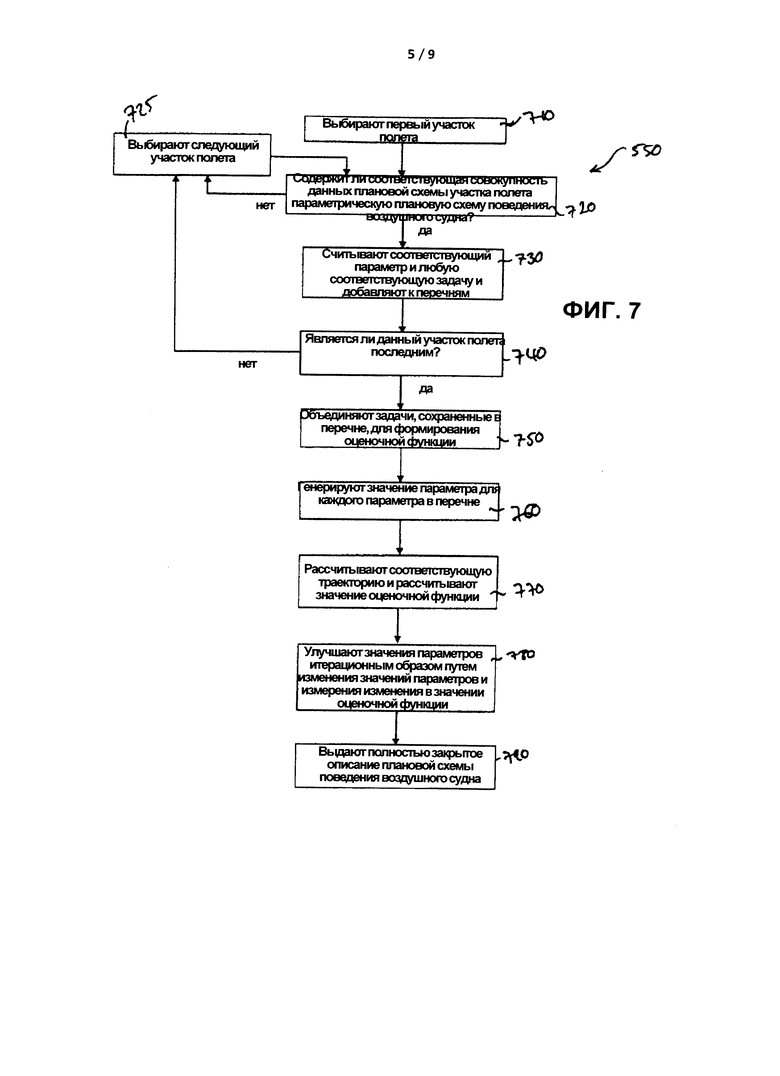
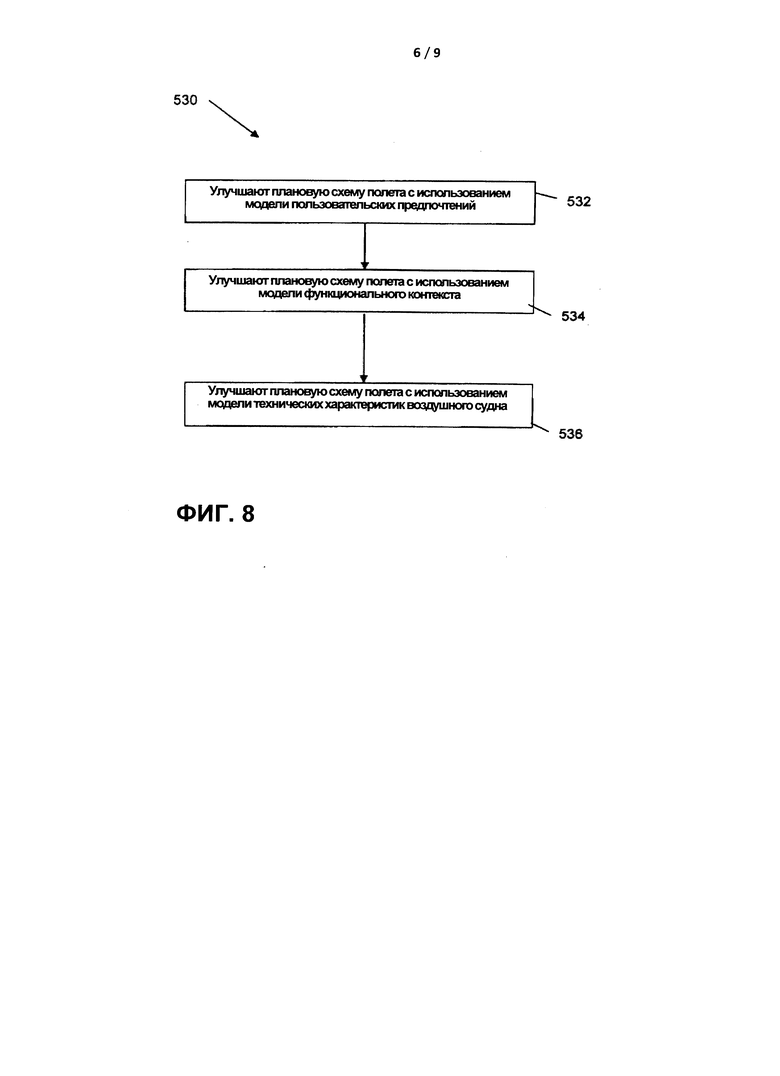
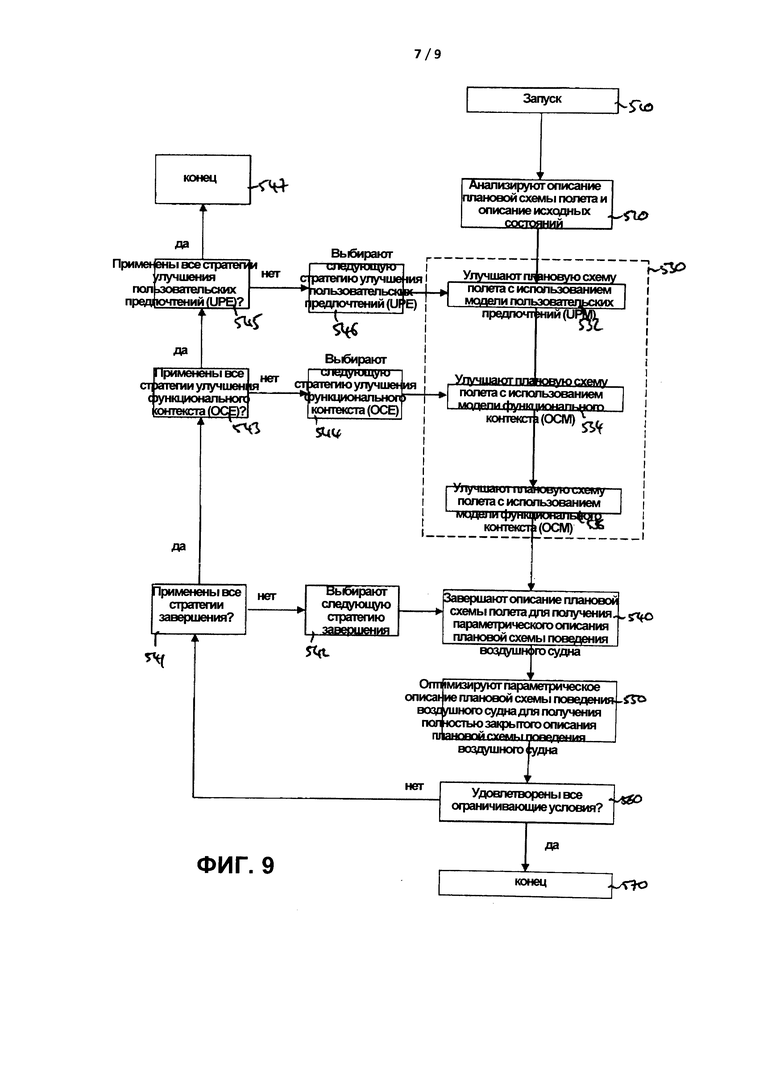
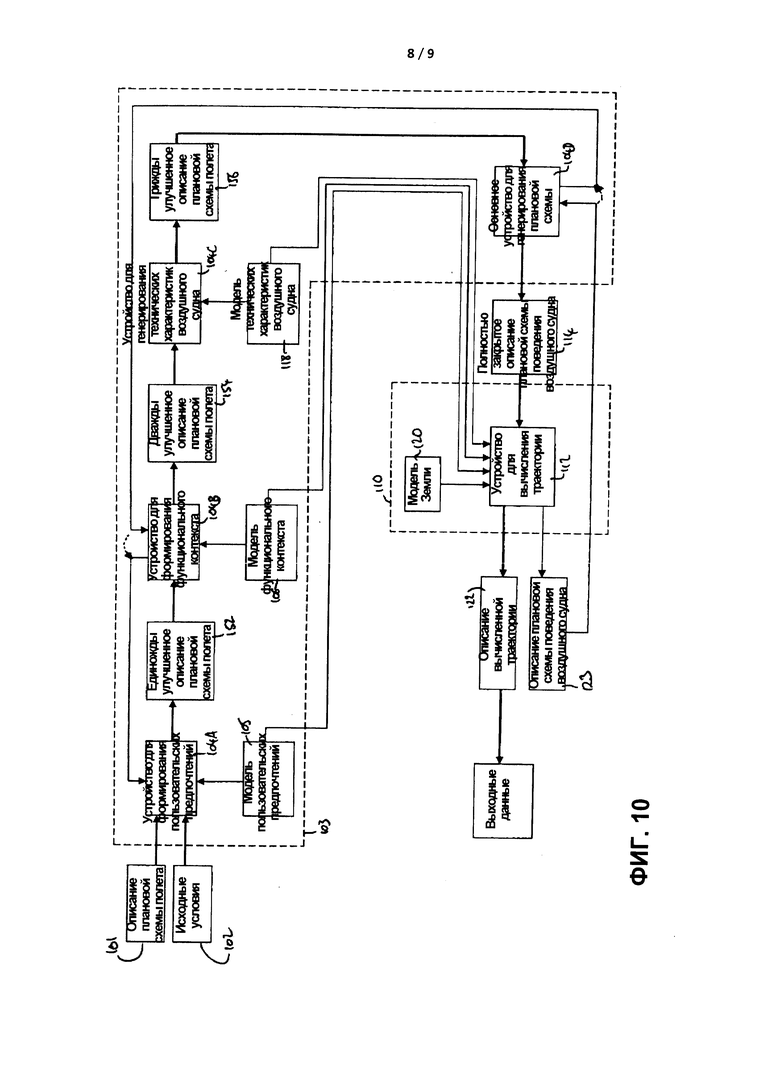
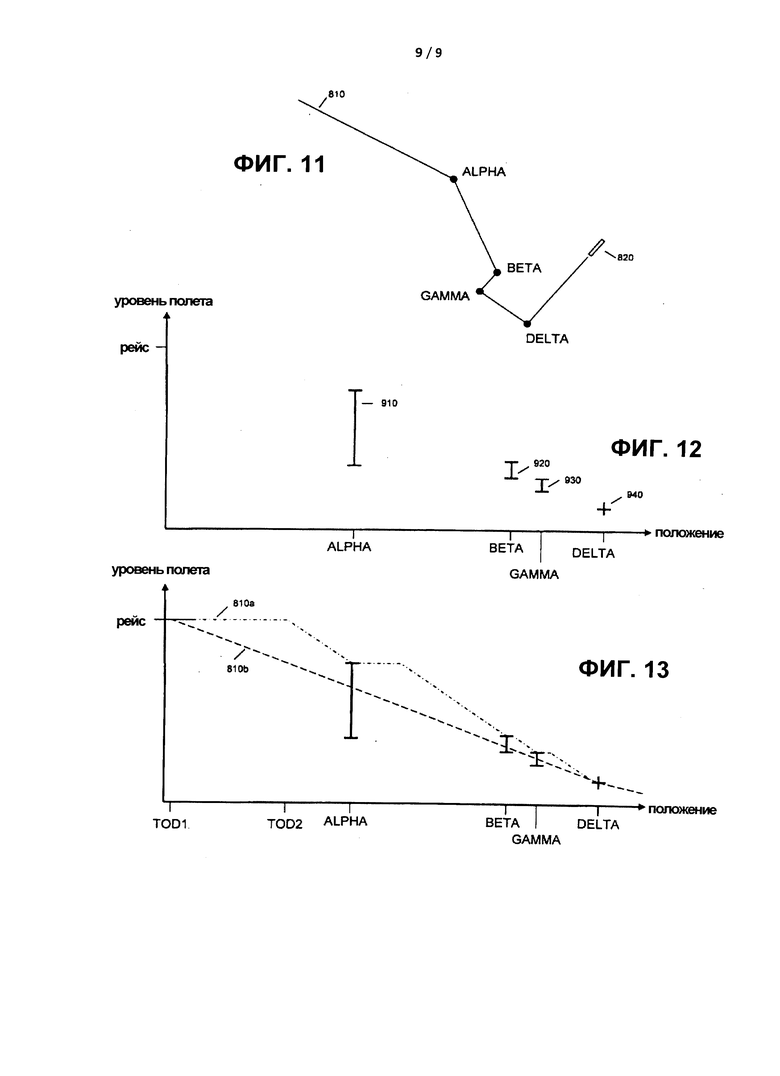
Группа изобретений относится к способу генерирования описания плановой схемы поведения воздушного судна, компьютерной инфраструктуре для выполнения способа и воздушному судну, содержащему такую инфраструктуру. Для реализации способа получают описание плановой схемы полета для указанного периода полета, обеспечивают анализ описания плановой схемы полета, генерируют для каждого участка полета соответствующую совокупность данных определенным образом, сравнивают совокупности данных плановых схем участков полета с ограничивающими условиями и/или задачами и идентифицируют их, улучшают совокупности данных плановых схем участков полета на основании пользовательских предпочтений, функционального контекста, технических характеристик, производят этап завершения примеров открытой плановой схемы поведения и этап оптимизации. Обеспечивается возможность однозначного прогнозирования пути воздушного судна. 3 н. и 10 з.п. ф-лы, 13 ил.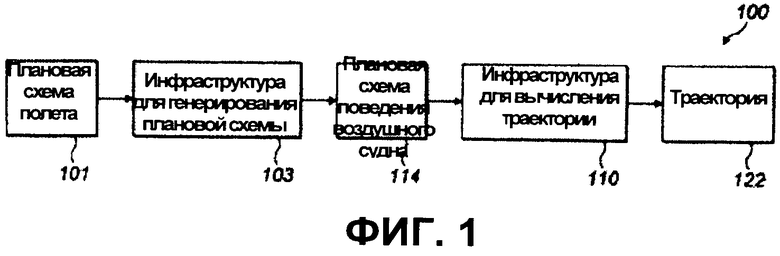
1. Реализуемый посредством компьютера способ генерирования описания плановой схемы (114) поведения воздушного судна, выраженного в формализованном языке, который обеспечивает однозначное четырехмерное описание планируемого перемещения и конфигурации воздушного судна во время периода полета, включающий:
получение описания (101) плановой схемы полета, соответствующего плану полета, охватывающему указанный период полета,
обеспечение анализа описания (101) плановой схемы полета для обеспечения примеров плановой схемы (101) полета, каждый из которых охватывает участок полета, причем указанные участки полета вместе охватывают указанный период полета,
генерирование, для каждого участка полета, соответствующей совокупности данных участка плановой схемы полета, которая содержит один или большее количество примеров плановой схемы (101) полета и/или один или большее количество примеров открытой плановой схемы (114) поведения воздушного судна,
причем каждый пример открытой плановой схемы (114) поведения воздушного судна описывает перемещение воздушного судна по меньшей мере в одной степени свободы перемещения, что обеспечивает охват указанной по меньшей мере одной соответствующей степени свободы перемещения, и/или обеспечивает описание конфигурации воздушного судна для охвата по меньшей мере одной степени свободы конфигурации,
этап улучшения на основании пользовательских предпочтений, включающий:
сравнение совокупностей данных плановых схем участков полета с ограничивающими условиями и/или задачами, хранящимися в базе данных пользовательских предпочтений,
идентифицирование ограничивающих условий и/или задач, относящихся к указанным совокупностям данных плановых схем участков полета, и
улучшение указанных совокупностей данных плановых схем участков полета с использованием информации, описывающей идентифицированные ограничивающие условия и/или задачи, что обеспечивает формирование улучшенного описания (101) плановой схемы полета,
причем указанный этап улучшения на основании пользовательских предпочтений выполняют согласно стратегии улучшения пользовательских предпочтений,
этап улучшения на основании функционального контекста, включающий:
сравнение совокупностей данных плановых схем участков полета с ограничивающими условиями и/или задачами, хранящимися в базе данных функционального контекста,
идентифицирование ограничивающих условий и/или задач, относящихся к указанным совокупностям данных плановых схем участков полета, и
улучшение указанных совокупностей данных плановых схем участков полета с использованием информации, описывающей идентифицированные ограничивающие условия и/или задачи, что обеспечивает формирование дополнительно улучшенного описания (101) плановой схемы полета,
причем указанный этап улучшения на основании функционального контекста выполняют согласно стратегии улучшения функционального контекста,
этап улучшения на основании технических характеристик воздушного судна, включающий:
сравнение совокупностей данных плановых схем участков полета с ограничивающими условиями и/или задачами, хранящимися в базе данных технических характеристик воздушного судна,
идентифицирование ограничивающих условий и/или задач, относящихся к указанным совокупностям данных плановых схем участка полета, и
улучшение указанных совокупностей данных плановых схем участков полета с использованием информации, описывающей идентифицированные ограничивающие условия и/или задачи, что обеспечивает формирование еще одного дополнительно улучшенного описания (101) плановой схемы полета,
этап завершения примеров открытой плановой схемы (114) поведения воздушного судна, включающий:
преобразование примеров открытой плановой схемы (114) поведения воздушного судна в указанных совокупностях данных плановых схем участков полета в примеры параметрической плановой схемы (114) поведения воздушного судна путем идентифицирования совокупностей данных плановых схем участков полета, в которых охвачены не все степени свободы, и завершения идентифицированных совокупностей данных плановых схем участков полета путем добавления или изменения одного или большего количества примеров плановой схемы (114) поведения воздушного судна для того, чтобы охватить все степени свободы путем выбора стратегии завершения из множества сохраненных стратегий завершения и добавления или изменения примера плановой схемы поведения воздушного судна, соответствующей стратегии завершения, и
сравнение совокупностей данных плановых схем участков полета, что обеспечивает наличие полностью закрытого описания параметрической плановой схемы (114) поведения воздушного судна за период полета, выраженного в формализованном языке,
причем указанный этап добавления примера плановой схемы (114) поведения воздушного судна включает обеспечение диапазона параметра, что обеспечивает формирование параметрического описания плановой схемы (114) поведения воздушного судна, и
этап оптимизации указанного описания параметрической плановой схемы (114) поведения воздушного судна, включающий определение оптимального значения указанного параметра каждого диапазона параметра согласно стратегии оптимизации, что обеспечивает генерирование полностью закрытого описания плановой схемы (114) поведения воздушного судна.
2. Способ по п. 1, дополнительно включающий:
если отсутствует возможность генерирования полностью закрытого описания плановой схемы (114) поведения воздушного судна, удовлетворяющего всем задачам и ограничивающим условиям, содержащимся в указанном еще одном дополнительно улучшенном описании (101) плановой схемы полета, сформированном путем указанного улучшения на основании технических характеристик воздушного судна,
выполнение циклов оптимизации, включающее итерационное повторение указанного этапа оптимизации параметрического описания плановой схемы (114) поведения воздушного судна согласно альтернативным стратегиям оптимизации до тех пор, пока не сгенерировано полностью закрытое описание плановой схемы (114) поведения воздушного судна, которое удовлетворяет всем задачам и ограничивающим условиям, содержащимся в указанном еще одном дополнительно улучшенном описании (101) плановой схемы полета, сформированной путем указанного улучшения на основании технических характеристик воздушного судна.
3. Способ по п. 2, дополнительно включающий:
если после выполнения циклов оптимизации отсутствует возможность генерирования полностью закрытого описания плановой схемы (114) поведения воздушного судна, удовлетворяющего всем задачам и ограничивающим условиям, содержащимся в указанном еще одном дополнительно улучшенном описании (101) плановой схемы полета, сформированном путем указанного улучшения на основании технических характеристик воздушного судна,
выполнение циклов завершения, включающее итерационное повторение указанного этапа завершения описания (101) плановой схемы полета согласно альтернативным стратегиям завершения, и выполнение, во время каждой итерации цикла завершения, циклов оптимизации до тех пор, пока не сгенерирована полностью закрытая плановая схема (114) поведения воздушного судна, которая удовлетворяет всем задачам и ограничивающим условиям, содержащимся в указанном еще одном дополнительно улучшенном описании (101) плановой схемы полета, сформированной путем указанного улучшения на основании технических характеристик воздушного судна.
4. Способ по п. 1, дополнительно включающий:
если отсутствует возможность генерирования полностью закрытого описания плановой схемы (114) поведения воздушного судна, удовлетворяющего всем задачам и ограничивающим условиям, содержащимся в указанном еще одном дополнительно улучшенном описании (101) плановой схемы полета, сформированном путем указанного улучшения на основании технических характеристик воздушного судна,
выполнение циклов завершения, включающее итерационное повторение указанного этапа завершения описания (101) плановой схемы полета согласно альтернативным стратегиям завершения, и, во время каждой итерации цикла завершения, выполнение указанного этапа оптимизации до тех пор, пока не сгенерирована плановая схема (114) поведения воздушного судна, которая удовлетворяет всем задачам и ограничивающим условиям, содержащимся в указанном еще одном дополнительно улучшенном описании (101) плановой схемы полета, сформированном путем указанного улучшения на основании технических характеристик воздушного судна.
5. Способ по п. 3 или 4, дополнительно включающий:
если после выполнения циклов завершения отсутствует возможность генерирования полностью закрытого описания плановой схемы (114) поведения воздушного судна, удовлетворяющего всем задачам и ограничивающим условиям, содержащимся в указанном еще одном дополнительно улучшенном описании (101) плановой схемы полета, сформированном путем указанного улучшения на основании технических характеристик воздушного судна,
выполнение циклов функционального контекста, включающее итерационное повторение указанного этапа улучшения на основании функционального контекста согласно альтернативным стратегиям улучшения функционального контекста с последующим выполнением этапа улучшения на основании технических характеристик воздушного судна и выполнения, во время каждой итерации указанного цикла функционального контекста, указанных циклов завершения до тех пор, пока не сгенерировано полностью закрытое описание плановой схемы (114) поведения воздушного судна, которое удовлетворяет всем задачам и ограничивающим условиям, содержащимся в указанном еще одном дополнительно улучшенном описании (101) плановой схемы полета, сформированном путем указанного улучшения на основании технических характеристик воздушного судна.
6. Способ по п. 5, дополнительно включающий:
если после выполнения циклов функционального контекста отсутствует возможность генерирования полностью закрытого описания плановой схемы (114) поведения воздушного судна, удовлетворяющего всем задачам и ограничивающим условиям, содержащимся в указанном еще одном дополнительно улучшенном описании (101) плановой схемы полета, сформированном путем указанного улучшения на основании технических характеристик воздушного судна,
выполнение циклов пользовательских предпочтений, включающее итерационное повторение указанного этапа улучшения на основании пользовательских предпочтений согласно альтернативным стратегиям улучшения пользовательских предпочтений и, во время каждой итерации указанного цикла пользовательских предпочтений, выполнение указанных циклов функционального контекста до тех пор, пока не сгенерировано полностью закрытое описание плановой схемы (114) поведения воздушного судна, которое удовлетворяет всем задачам и ограничивающим условиям, содержащимся в указанном еще одном дополнительно улучшенном описании (101) плановой схемы полета, сформированном путем указанного улучшения на основании технических характеристик воздушного судна.
7. Способ по пп. 1, 2, 3 или 4, согласно которому база данных функционального контекста содержит хранящиеся в ней ограничивающие условия, которые содержат ограничения в отношении полета в воздушном пространстве,
и, при необходимости, идентифицирование ограничивающих условий, относящихся к указанным совокупностям данных плановых схем участков полета, включает идентифицирование только тех ограничивающих условий, которые воздействуют на воздушное пространство, через которое воздушное судно будет проходить во время соответствующего участка полета.
8. Способ по пп. 1, 2, 3 или 4, согласно которому база данных пользовательских предпочтений содержит сохраненные в ней задачи, которые содержат информацию, описывающую функциональные предпочтения,
и, при необходимости, идентифицирование задач, относящихся к указанным совокупностям данных плановых схем участков полета, включает идентифицирование задач, связанных с воздушным судном, например путем идентифицирования задач авиакомпании, обслуживающей воздушное судно, путем идентифицирования задач, относящихся к фазе полета, совершаемой во время соответствующего участка полета, или путем идентифицирования задач, относящихся к воздушному пространству, через которое воздушное судно будет проходить во время соответствующего участка полета.
9. Способ по пп. 1, 2, 3 или 4, согласно которому этап завершения описания (101) плановой схемы полета включает:
идентифицирование стратегий завершения по степеням свободы, на которые они влияют, и выбор стратегии завершения для охвата степени свободы в идентифицированном участке полета из стратегий, идентифицированных для оказания влияния на указанную степень свободы,
и, при необходимости, идентифицирование стратегий завершения по фазе полета, к которой их применяют, и выбор стратегии завершения для охвата степени свободы из стратегий, идентифицированных для оказания влияния на указанную степень свободы и идентифицированных для применения к указанной фазе полета, связанной с идентифицированным участком полета.
10. Способ по пп. 1, 2, 3 или 4, согласно которому определение оптимальных значений на этапе оптимизации параметрического описания плановой схемы (114) поведения воздушного судна включает:
генерирование исходных значений параметров согласно стратегии оптимизации, что обеспечивает формирование модели описания плановой схемы поведения воздушного судна,
расчет траектории (122) из указанной модели описания плановой схемы поведения воздушного судна,
расчет значения оценочной функции для траектории (122) с использованием оценочной функции, которую, при необходимости, формируют с использованием задач, содержащихся в указанном еще одном дополнительно улучшенном описании плановой схемы полета, и
повторение итераций изменения значений параметров, расчет результирующей траектории (122) и расчет значения результирующей оценочной функции для определения того, улучшено ли полностью закрытое описание плановой схемы (114) поведения воздушного судна, что обеспечивает оптимизацию указанных значений параметров путем улучшения значения оценочной функции.
11. Способ по пп. 1, 2, 3 или 4, согласно которому рассчитывают траекторию (122) за период полета из полностью закрытого описания плановой схемы (114) поведения воздушного судна и, при необходимости, вызывают то, что воздушное судно летит по указанной траектории (122) или сравнивают указанную траекторию (122) с траекториями другого воздушного судна для идентификации конфликтных ситуаций.
12. Компьютерная инфраструктура, запрограммированная на выполнение способа по пп. 1, 2, 3 или 4.
13. Воздушное судно, содержащее компьютерную инфраструктуру по п. 12.
| WO 2012044405 A1, 05.04.2012 | |||
| СПОСОБ УВЕЛИЧЕНИЯ НЕФТЕОТДАЧИ ЗАЛЕЖИ В КАРБОНАТНЫХ КОЛЛЕКТОРАХ ТРЕЩИННО-ПОРОВОГО ТИПА | 2011 |
|
RU2482269C2 |
| US 2011062942 A1, 07.03.2011 | |||
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2388663C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |

