Область техники, к которой относится изобретение
Изобретение относится к области геофизики, в частности к техническим решениям, предназначенным для сбора сейсмических данных.
Глоссарий
С целью обеспечения достаточности раскрытия изобретения и обеспечения возможности проведения информационного поиска в отношении заявляемого технического решения, а также для понимания сущности заявляемого изобретения, ниже приведен перечень используемых в описании терминов, неограничивающих объем правовой охраны.
Бескабельный регистрирующий модуль - электронное устройство, обеспечивающее прием сейсмических сигналов, их преобразование в цифровой код, регистрацию данных в различных форматах, привязку регистрируемых данных к единому времени. Совокупность бескабельных регистрирующих модулей представляет собой регистрирующую систему.
Беспилотное воздушное средство (беспилотное воздушное судно) - воздушное судно, которое выполняет полет без командира воздушного судна на борту и либо полностью дистанционно управляется из другого места с земли, с борта другого воздушного судна, либо запрограммировано и полностью автономно осуществляет пролет по заданному маршруту.
Беспилотная авиационная система - комплекс взаимосвязанных элементов, включающий в себя беспилотное воздушное судно, харвестер и средство для связи с бескабельными регистрирующими модулями, управляемые с помощью наземной станции управления.
Маршрут пролета - проекция заданной траектории полета воздушного судна на земную (водную) поверхность, определенная основными точками пролета и высотами пролета в этих точках.
Наземная станция управления - ЭВМ, и приемо-передающее устройство предназначенные для осуществления предполетных проверок, управления полетом и посадкой беспилотного воздушного судна по линии цифровой радиосвязи при помощи загружаемого в нее полетного задания, а также контроля за всеми системами и нагрузками беспилотного воздушного судна.
Центральная регистрирующая система - ЭВМ, предназначенная для аккумулирования сейсмических данных, с целью их последующей обработки и анализа, а также калибровки и визуализации.
Цифровая модель местности - электронный файл, содержащий сведения о трехмерном отображении земной поверхности и всех объектах, размещенных на ней, представленном в виде массива точек с определенной высотой, получаемый по результатам аэросъемочных работ, проведенным перед стартом сейсморазведочных работ либо непосредственно перед началом регистрации сейсмических данных
Цифровая модель рельефа - электронный файл, содержащий сведения о трехмерном отображении земной поверхности, представленном в виде массива точек с определенной высотой, получаемый по результатам аэросъемочных работ, проведенным перед стартом сейсморазведочных работ либо непосредственно перед началом регистрации сейсмических данных.
Регистрирующая система - приборно-аппаратный комплекс. включающий ЭВМ, специальные аппаратные блоки и систему хранения данных, осуществляющий визуализацию входных данных, выполнение калибровки сейсмических каналов, содержащий программное обеспечение для предварительной оценки качества зарегистрированных данных.
Дистанция сбора данных - дистанция, на которой обеспечивается связь харвестера с бескабельными регистрирующими модулями, позволяющая произвести передачу и запись данных с модуля без возникновения ошибок и сбоев.
Сейсмические данные - совокупность сейсмических сигналов, зарегистрированных бескабельным регистрирующим модулем.
Харвестер - устройство для сбора и хранения сейсмических данных с бескабельных регистрирующих модулей. Может быть исполнено на базе одноплатного компьютера или планшета и оборудовано усилителем сигнала разъема одноплатного ПК.
Уровень техники
Проведение сбора сейсмических данных в ходе наземных сейсморазведочных работ является одним из наиболее трудозатратных шагов при реализации полевых геофизических наблюдений. Применяемые с начала 10-х годов XXI века автономные бескабельные системы регистрации значительно оптимизировали работы по проведению сбора сейсмических данных по сравнению с применяемыми ранее кабельными системами. В то же время большинство бескабельных систем не обеспечивают бесперебойного поступления данных сейсморазведочных полевых работ в полевой отряд контроля качества данных, что повышает неопределенность при принятии решений о перемещении систем регистрации.
На данное время известные решения по методикам проведения скачивания сейсмических данных с бескабельных регистрирующих систем подразделяются на наземные методы сбора данных и межблоковую передачу данных.
Наземные методы скачивания данных рекомендованы производителями сейсмического оборудования, например, Sercel, в таких системах, как, например, «WTU-508»1 (1 Источник: https://www.sercel.com/products/Lists/ProductSpecification/WTU508_brochure_Sercel_RU.pdf). Их основной недостаток - высокая ресурсоемкость при проведении объезда оборудования регистрирующей системы на моторизированной технике либо пешеходным способом для сбора сейсмических данных харвестером, перемещаемым оператором системы.
Межблоковая передача данных реализована компанией Wireless в таких системах, как, например, «RT System 2»2 (2 Источник: https://wirelessseismic.com//wp-content/uploads/2017/11/03_RT2-brochure_Russian.pdf). Их основным преимуществом является отсутствие потребности в перемещении вдоль бескабельной регистрирующей системы для получения данных и скорость передачи данных отделу контроля качества в течение нескольких минут после регистрации сигнала. Основным недостатком таких систем является повышенное энергопотребление и стоимость оборудования, при использовании технологий одного уровня развития относительно бескабельных систем без межблоковой передачи данных обеспечивающие меньшую автономность и повышенный риск поломок при большей стоимости.
В качестве технического решения, которое позволило бы устранить недостатки наземного сбора данных оператором системы на моторизированной технике или путем обхода в виде ресурсоемкости и временных затрат и недостатки использования систем с межблоковой передачей данных в виде существенно меньшей автономости системы, были разработаны системы для сбора данных с бескабельных регистрирующих модулей, не оборудованных устройством межблоковой передачи данных, с помощью беспилотных воздушных судов.
Использование беспилотной авиационной системы позволяет снизить стоимость работ за счет привлечения меньших ресурсов, повысить производительность за счет автоматизации операций, снизить уровень рисков производственной безопасности за счет замены рутинных операций на роботизированные. Заявляемое изобретение направлено на усовершенствование подхода к использованию беспилотных авиационных систем, как автономно перемещающихся по участку проведения работ устройств сбора сейсмических данных с бескабельных систем регистрации, как замену ожиданию доставки приборов регистрации на базу сейсмической партии, так и замену объезда регистрирующей системы на наземной технике, которые выполняет человек.
В ходе патентного поиска были обнаружены документы, определяющие уровень техники и не считающиеся особо релевантным по отношению к заявленному изобретению, а именно:
«Система автономного сейсмического мониторинга местности с дистанционной передачей информации на летательный аппарат» (заявка на выдачу патента РФ на изобретение №2013139031, дата подачи: 22.08.2013);
«Способ сейсмической разведки при поиске углеводородов и сейсмический комплекс для его осуществления» (патент на изобретение РФ №2431868, дата приоритета 09.04.2010);
«Беспилотный летательный аппарат на базе системы сейсморазведки» (Seismic acquisition system-based unmanned airborne vehicle, патент №US9400338B2 дата приоритета 18.09.2018);
«Запись сейсмических данных» (Seismic data recording, патент №US8547796B2, дата приоритета 28.12.2007);
«Радиосистема сбора сейсмических данных», (Seismic gathering radio system, патент №GB2056222A, дата приоритета 11.03.1979);
«Получение сейсмических данных со сверхдальним смещением для полной инверсии формы волны», (Acquisition of ultra-long offset seismic data for full waveform inversion, патент №US11255988B2, дата приоритета 08.07.2018);
«Способ сбора сейсмических данных и формирования выходных сейсмических файлов» (Method For Harvesting Seismic Data And Generating Seismic Output Files, заявка на выдачу патента №US11255988B2, опубл. 14.01.2016);
«Системы и способ сбора сейсмических данных, использующие блок ретранслятора проводной линии» (Seismic data acquisition systems and method utilizing a wireline repeater unit, заявка на выдачу патента №US20120182832A1, опубл. 19.07.2019).
Вышеуказанные технические решения представляют собой различные варианты использования беспилотных воздушных судов для сбора сейсмических данных с бескабельных регистрирующих модулей.
В качестве аналога можно выделить техническое решение «Метод сбора, оборудование и запоминающее устройство беспроводного сейсмического детектора на базе беспилотного самолета» (Wireless seismic detector collecting method, equipment and storage device based on unmanned plane, патент №CN108415071A, дата приоритета 29.01.2018). Согласно описанию, указанное решение включает в себя способ сбора данных беспроводным сейсмическим детектором, оборудование и запоминающие устройства на основе беспилотного самолета. При этом для реализации способа сбора данных беспроводным сейсмическим датчиком на основе беспилотного самолета, узел беспроводного сейсмического датчика устанавливается первым, устанавливается траектория полета беспилотного самолета, беспилотный самолет проходит через беспроводное телекоммуникационное оборудование беспроводного приемника и беспроводного сейсмического детектора, собираются все хранимые сейсмические данные узла беспроводного сейсмического детектора, беспилотный самолет возвращается в исходную точку, передает данные на главную консоль. Недостатком данного технического решения является возможность применения данного способа только на бескабельных системах, оборудованных GPS-модулями, тогда как заявляемое техническое решение может быть реализовано без применения GPS-модулей за счет использования заранее известных координат расположения бескабельных регистрирующих модулей.
В качестве прототипа заявляемого изобретения можно рассматривать техническое решение, раскрытое в патенте «Комплексная система и метод сбора сейсмических данных "воздух-земля"» (Air-ground integrated seismic data collection system and method № CN110579794A, дата приоритета 18.10.2019). Решение представляет собой систему, включающую беспилотный летательный аппарат и множество беспроводных сейсмографов; каждый беспроводной сейсмограф используется для сбора и хранения сейсмических данных в соответствующем районе; беспилотный летательный аппарат снабженный беспроводным устройством сбора сейсмических данных, и метод, согласно которому беспроводное устройство сбора сейсмических данных используемое для последовательного сбора сейсмических данных от множества беспроводных сейсмографов, когда беспилотный летательный аппарат летит по маршруту полета. При этом маршрут пролета вычисляется методом наименьших квадратов, который не позволяет обеспечить требуемую безаварийность при минимизации сроков сбора данных и энергозатрат беспилотной авиационной системы.
Вышеуказанные технические решения, как и заявляемое изобретение, в той или иной мере предназначены для сбора сейсмических данных с помощью беспилотных воздушных судов, однако устройство способов сбора сейсмических данных вышеуказанных технических решений существенно отличается от предлагаемого в настоящем изобретении.
В частности, ключевым отличием заявляемого способа от прототипа является использование цифровой модели местности для построения безопасного маршрута пролета беспилотного воздушного судна с целью сбора сеймических данных с бескабельных регистрирующих модулей, а также применение дополнительных условий построения маршрута в одной из частных форм реализации заявленного способа.
Техническая задача, для решения которой предназначено настоящее изобретение, заключается в автоматизации процесса сбора сейсмических данных и упрощении выполнения сейсморазведочных работ в труднодоступной местности за счет снижения привлекаемых человеческих и технических ресурсов без потери качества сбора зарегистрированных сейсмических данных, отличающегося обеспечением возможности пролета беспилотного воздушного судна по оптимальному маршруту с точки зрения баланса между безопасностью пролета и необходимостью минимизации энергозатрат беспилотной авиационной системы.
Техническим результатом исследуемого решения является снижение аварийности процесса сбора данных с бескабельных регистрирующих модулей для сейсморазведочных работ с использованием беспилотных воздушных судов в труднодоступных местностях при условии необходимости сохранения полноты передачи данных, минимизации сроков сбора сейсморазведочных данных и энергозатрат беспилотной авиационной системы.
Заявленный технический результат достигается с использованием группы устройств, содержащей расположенные на участке полевых сейсморазведочных работ бескабельные регистрирующие модули и беспилотную авиационную систему, состоящую из беспилотного воздушного судна, антенны для связи с бескабельными регистрирующими модулями и харвестера, а также наземную систему управления и центральную регистрирующую систему, при этом способ согласно изобретению включает:
занесение в центральную регистрирующую систему и беспилотную авиационную систему координат бескабельных регистрирующей модулей, цифровой модели рельефа и информации о текущих планах и фактах проведения сейсморазведки;
расчет маршрута пролета беспилотного воздушного судна с использованием цифровой модели рельефа и местности для определения траектории и высоты пролета;
пролет беспилотного воздушного судна по сформированному маршруту, сопровождающийся сбором данных с бескабельных регистрирующих модулей беспилотной авиационной системой;
передачу данных, собранных беспилотной авиационной системой с бескабельных регистрирующих модулей, на центральную регистрирующую систему.
Раскрытие изобретения
Для решения поставленной задачи и достижения вышеуказанного технического результата предлагается способ проведения сбора сейсморазведочных данных с использованием беспилотных воздушных средств.
Группа устройств для реализации настоящего способа состоит из следующих элементов:
1. Бескабельные регистрирующие модули, расположенные на участке полевых сейсморазведочных работ по регулярной и/или нерегулярной сети. Модули содержат геофон, АЦП и интегральные схемы, Wi-Fi антенну и блок передачи данных. Модули предназначены для сбора сейсмических сигналов. Совокупность бескабельных регистрирующих модулей представляет собой регистрирующую систему.
2. Беспилотное воздушное судно, дополнительно содержащее устройства связи c бескабельными регистрирующими модулями (антенна), а также харвестер. Харвестер может быть выполнен на базе одноплатного компьютера или планшета, а также система может быть дополнительно снабжена усилителем сигнала разъема одноплатного ПК.
3. Наземная система управления, с которой осуществляется создание, загрузка на беспилотное воздушное судно и контроль выполнения полетного задания.
4. Центральная регистрирующая система, включающая сервер и программное обеспечение, необходимое для реализации заявленного способа.
На первом этапе заявленного способа осуществляется занесение в центральную регистрирующую систему и беспилотную авиационную систему координат бескабельных регистрирующих модулей, цифровой модели рельефа, цифровой модели местности и информации о текущих планах и фактах проведения сейсморазведки. В частности, под информацией о текущих планах и фактах проведения сейсморазведки понимаются ежедневно получаемые за прошедший производственный день данные от специалистов, отвечающих за регистрацию сейсмического сигнала, плановых площадях, контурах и линиях записи сейсмического сигнала на предстоящий день и фактически осуществленных регистрациях данных и сведениях о точках размещения бескабельных регистрирующих модулей, которые должны были записать сейсмический сигнал.
Далее производится расчет маршрута пролета беспилотного воздушного судна с использованием цифровой модели рельефа и цифровой модели местности для определения траектории и высоты пролета.
Цифровая модель рельефа строится на основе летней съемки, применяемой для планирования сейсморазведочных работ. Процесс получения ЦМР гостирован (ГОСТ Р 52440-2005, ГОСТ Р 59328-2021). При этом при планировании полетного задания ЦМР учитывается необходимость выполнения полетов на оптимальной высоте относительно расположенных на рельефе бескабельных регистрирующих модулей. Для этого определение оптимальной высоты пролета производится с учетом предположения о расположении БРМ на рельефе (ЦМР) и построением полетного задания с генеральным огибанием рельефа и удержанием условно-постоянной высоты полета над точками установки БРМ (с погрешностью +/- 10-15 м, обусловленной неоднородностью атмосферы и возможностью удержания заданной высоты полета беспилотным воздушным судном). Также при планировании полетного задания ЦМР учитывается необходимость обеспечения безопасности полета - учет резких перепадов рельефа и высотных объектов, таких как ЛЭП, вышки связи и одиноко стоящие деревья и т.д., с учетом которых производится корректировка оператором маршрута движения беспилотного воздушного судна с огибанием в плане одиночных объектов и огибанием по высоте массивов высотных объектов с закладкой дополнительных пролетов для компенсации скорости сбора данных.
Полет беспилотного воздушного судна над регистрирующей системой производится на высоте, обеспечивающей безопасный пролет над местностью с учетом рельефа и локальных естественных и антропогенных объектов. Для решения задачи безопасного выполнения полета используется цифровая модель местности, получаемая по результатам аэросъемочных работ проведенным перед стартом сейсморазведочных работ либо непосредственно перед началом регистрации сейсмических данных. В случае работ в равнинной местности без антропогенных объектов возвышающихся над растительностью допускается выполнение полетов на фиксированной высоте равной или превышающей 50 метров над точкой старта.
Высота полета беспилотного воздушного судна измеряется относительно рельефа и должна выдерживаться в пределах 5% от проектной. Проектная высота и скорость полета определяется дальностью связи установленного на беспилотном воздушном судне приёмо-считывающего устройства.
После расчета маршрута осуществляется пролет беспилотного воздушного судна по сформированному маршруту, сопровождающийся сбором данных с бескабельных регистрирующих модулей беспилотной авиационной системой. При этом оператор наземной системы управления контролирует процесс сбора сейсмических данных харвестером и в случае необходимости повторяет или корректирует маршрут пролета беспилотного воздушного судна. Такая необходимость может возникнуть в том случае, если за время пролета беспилотного воздушного судна в зоне сбора сейсмических данных с бескабельного регистрирующего модуля передача данных с бескабельного регистрирующего модуля на харвестер беспилотного воздушного судна не была завершена или анализ загруженных данных показал, что загруженные данные являются бракованными, то есть содержат недопустимое количество некорректно считанных данных.
После окончания пролета осуществляется передача данных, собранных беспилотной авиационной системой с бескабельных регистрирующих модулей, от беспилотной авиационной системы на центральную регистрирующую систему.
Частная форма реализации заявляемого способа предполагает в дополнение к использованию цифровой модели рельефа для расчета маршрута пролета беспилотного воздушного судна использование заданных условий построения маршрута. В частности, высота пролета беспилотного воздушного судна определяется между минимально безопасной высотой пролета с учетом рельефа, локальных естественных и антропогенных объектов, и максимально возможной дистанцией сбора данных с бескабельных регистрирующих модулей беспилотной авиационной системой без возникновения сбоев передачи данных. При этом траектория полета прокладывается над точками установки бескабельных регистрирующих модулей в случае, когда длина дистанции сбора данных составляет менее 70% от длины расстояния между линиями или дальними сторонами коридоров установки бескабельных регистрирующих модулей, а в случае, когда длина дистанции сбора данных составляет более 70% от длины расстояния между линиями или дальними сторонами коридоров установки бескабельных регистрирующих модулей, траектория пролета прокладывается по оси, проходящей на равноудаленном расстоянии от линий или коридоров их установки.
Изобретение раскрывается и поясняется на следующих чертежах:
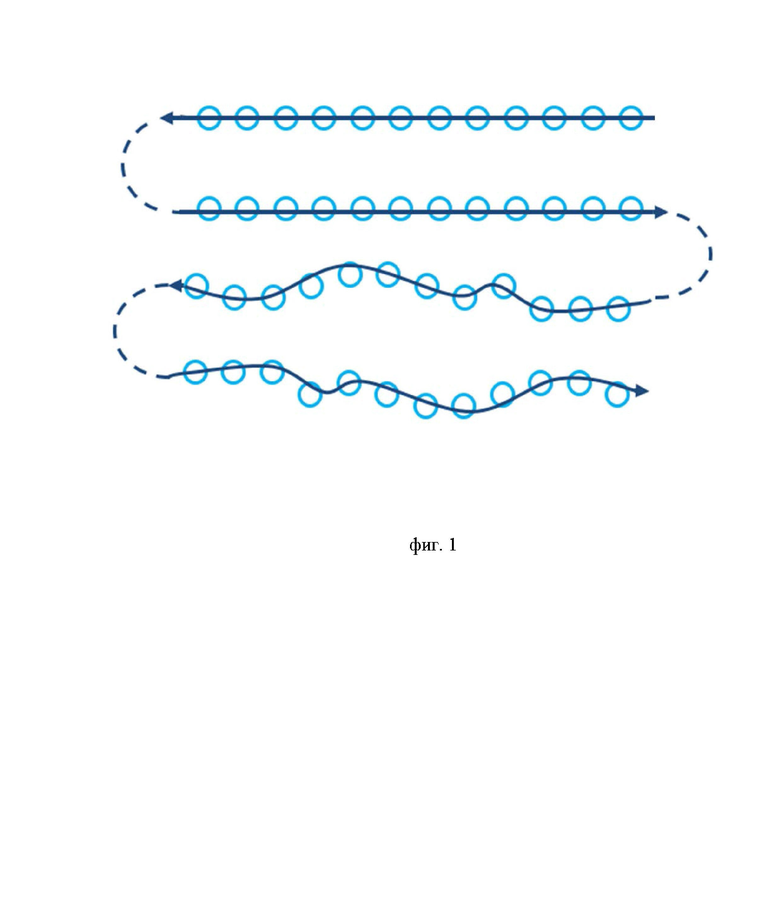
Фиг. 1 - Схема маршрута пролета беспилотного воздушного судна в случае, когда длина дистанции сбора данных составляет менее 70% от длины расстояния между линиями или дальними сторонами коридоров установки бескабельных регистрирующих модулей.
На вышеуказанной фигуре окружностями схематически отражены оси расположения бескабельных регистрирующих модулей на местности. Линией со стрелками отражен маршрут пролета беспилотного воздушного судна, причем жирной линией выделена часть пролета, в течение которой осуществляется сбор данных с бескабельных регистрирующих модулей, а пунктирной линией отражен маршрут пролета беспилотного воздушного судна между линиями бескабельных регистрирующих модулей, в течение которого не осуществляется сбор данных.
Как видно на вышеуказанной фигуре, в случае, когда длина дистанции сбора данных составляет менее 70% от длины расстояния между линиями или дальними сторонами коридоров установки бескабельных регистрирующих модулей, маршрут пролета беспилотного воздушного судна располагается над точками установки бескабельных регистрирующих модулей.
Фиг. 2 - Схема маршрута пролета беспилотного воздушного судна в случае, когда длина дистанции сбора данных составляет более 70% от длины расстояния между линиями или дальними сторонами коридоров установки бескабельных регистрирующих модулей.
На вышеуказанной фигуре окружностями также схематически отражены оси расположения бескабельных регистрирующих модулей на местности, а линией со стрелками отражен маршрут пролета беспилотного воздушного судна, причем жирной линией выделена часть пролета, в течение которой осуществляется сбор данных с бескабельных регистрирующих модулей и пунктирной линией отражен маршрут пролета беспилотного воздушного судна между коридорами бескабельных регистрирующих модулей, в течение которого не осуществляется сбор данных. При этом дополнительные пунктирные линии, проходят через центр коридора установки бескабельных регистрирующих модулей и отражают линию, относительно которой осуществляется расчет маршрута пролета беспилотного воздушного судна в случае, когда длина дистанции сбора данных составляет более 70% от длины расстояния между линиями или дальними сторонами коридоров установки бескабельных регистрирующих модулей.
При реализации заявляемого способа может быть использовано несколько беспилотных воздушных судов одновременно. В таком случае при расчете маршрута пролета с использованием цифровой модели рельефа для определения траектории и высоты пролета для каждого беспилотного воздушного судна рассчитывается отдельный маршрут пролета, при этом расчет маршрута производится таким образом, чтобы маршруты беспилотных воздушных судов проходили над разными бескабельными регистрирующими модулями и не пересекались между собой. Такой подход позволяет избежать необходимости оптимизации программного обеспечения, которая потребовалась бы в том случае, если бы была возможна ситуация, при которой несколько беспилотных воздушных судов осуществляют сбор сейсмических данных с одного и того же бескабельного регистрирующего модуля.
Применение беспилотных воздушных судов для сбора сейсмических данных с бескабельных регистрирующих систем заявленным способом позволяет оперативно передавать данные регистрации в центральную регистрирующую систему. Так, например, было успешно выполнено скачивание сейсмических данных в течении зимнего полевого сезона 2020-2021. В ходе полевых работ срок получения данных, рассчитываемый от момента регистрации сейсмического сигнала до момента получения данных специалистом для анализа, был сокращен с 14-20 дней при использовании моторизированной наземной техники до 1-3 дней с применением беспилотного воздушного судна заявляемым способом. Это позволило своевременно выявлять бракованные данные и осуществлять повторный сбор данных до того, как бескабельные регистрирующие модули перемещались на другой участок сейсморазведочных работ.
В ходе работ зимнего полевого сезона 2021-2022 также проводились работы по оперативному считыванию данных. При этом в ходе испытаний заявляемого способа благодаря использованию цифровой модели местности для формирования маршрута пролета, не было зарегистрировано ни одной аварии беспилотного воздушного судна в процессе сбора данных с бескабельных регистрирующих систем. Дополнительным полезным эффектом, достигаемым при реализации заявляемого способа, является снижение затрат человеческого ресурса, моторесурса и ГСМ по сравнению с межблоковой передачей данных, т.к. такие модули ограничены временем работы и требуются ресурсы человека для перемещения харвестера в процессе сбора и замены аккумуляторов модулей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ мониторинга в реальном времени безопасности при проведении полевых геологоразведочных работ с использованием беспилотных авиационных систем | 2023 |
|
RU2822718C1 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ В РЕАЛЬНОМ ВРЕМЕНИ | 2023 |
|
RU2823651C1 |
| Способ проведения геологоразведочных работ с использованием беспилотных воздушных средств | 2022 |
|
RU2805015C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК СИСТЕМЫ САМОНАВЕДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2830544C1 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| Способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора | 2023 |
|
RU2809495C1 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2741854C1 |

Изобретение относится к области геофизики, в частности к техническим решениям, предназначенным для сбора сейсмических данных. Заявлен способ проведения сбора сейсморазведочных данных, который содержит этапы: занесение в центральную регистрирующую систему и беспилотную авиационную систему координат бескабельных регистрирующих модулей, цифровой модели рельефа и информации о текущих планах и фактах проведения сейсморазведки; расчет маршрута пролета беспилотного воздушного судна с использованием цифровой модели рельефа и местности для определения траектории и высоты пролета; пролет беспилотной авиационной системы по сформированному маршруту, сопровождающийся сбором данных с бескабельных регистрирующих модулей беспилотной авиационной системой; передачу данных, собранных беспилотной авиационной системой с бескабельных регистрирующих модулей, на центральную регистрирующую систему. Технический результат заключается в снижении аварийности процесса сбора данных с бескабельных регистрирующих модулей для сейсморазведочных работ с использованием беспилотных воздушных средств в труднодоступных местностях при условии необходимости сохранения полноты передачи данных, минимизации сроков сбора сейсморазведочных данных и энергозатрат беспилотной авиационной системы. 1 з.п. ф-лы, 2 ил.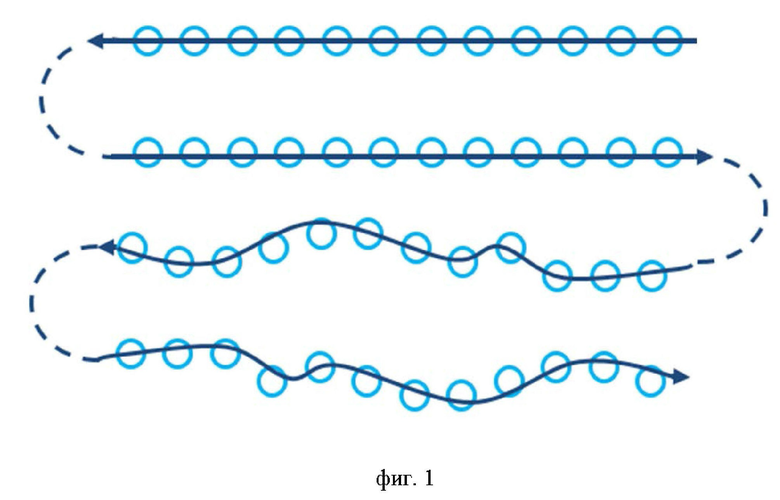
1. Способ проведения сбора сейсморазведочных данных с помощью группы устройств, содержащей расположенные на участке полевых сейсморазведочных работ бескабельные регистрирующие модули и беспилотную авиационную систему, состоящую из беспилотного воздушного судна, антенны для связи с бескабельными регистрирующими модулями и харвестера, а также наземную систему управления и центральную регистрирующую систему, включающий
занесение в центральную регистрирующую систему и беспилотную авиационную систему координат бескабельных регистрирующих модулей, цифровой модели рельефа и информации о текущих планах и фактах проведения сейсморазведки;
расчет маршрута пролета беспилотного воздушного судна с использованием цифровой модели рельефа и местности для определения траектории и высоты пролета;
пролет беспилотного воздушного судна по сформированному маршруту, сопровождающийся сбором данных с бескабельных регистрирующих модулей беспилотной авиационной системой;
передачу данных, собранных беспилотной авиационной системой с бескабельных регистрирующих модулей, на центральную регистрирующую систему.
2. Способ по п.1, отличающийся тем, что при расчете маршрута пролета беспилотного воздушного судна с использованием цифровой модели рельефа высота пролета беспилотного воздушного судна определяется между минимально безопасной высотой пролета с учетом рельефа, локальных естественных и антропогенных объектов и максимально возможной дистанцией сбора данных с бескабельных регистрирующих модулей беспилотной авиационной системой без возникновения сбоев передачи данных, а траектория полета прокладывается над точками установки бескабельных регистрирующих модулей в случае, когда длина дистанции сбора данных составляет менее 70% от длины расстояния между линиями или дальними сторонами коридоров установки бескабельных регистрирующих модулей, а в случае, когда длина дистанции сбора данных составляет более 70% от длины расстояния между линиями или дальними сторонами коридоров установки бескабельных регистрирующих модулей, траектория пролета прокладывается по оси, проходящей на равноудаленном расстоянии от линий или коридоров их установки.
| US 20140078865 A1, 20.03.2014 | |||
| CN 110579794 A, 17.12.2019 | |||
| CN 108415071 A, 17.08.2018 | |||
| CN 209606627 U, 08.11.2019 | |||
| CN 107145146 A, 08.09.2017. |

