[0001] Настоящее изобретение относится к планированию хирургической операции. В частности, настоящее изобретение относится к способу вычисления плана хирургической операции, элементу компьютерной программы, читаемому компьютером носителю и устройству для вычисления плана хирургической операции.
УРОВЕНЬ ТЕХНИКИ
[0002] Рак молочной железы является самым распространенным онкологическим заболеванием у женщин. Хирургическое лечение рака молочной железы, т.е. вырезание опухоли, часто является основным способом лечения рака молочной железы. Стандартная процедура состоит в частичном или полном удалении молочной железы (мастэктомии). Сохраняющая молочную железу хирургия, сопровождаемая радиационной терапией, является альтернативой, которая сопоставима с контролем опухолевого роста. Онкопластическая хирургия представляет собой сочетание онкологической хирургии для резекции опухоли с процедурами пластической хирургии для реконструкции молочной железы. Это приводит к косметически приемлемым результатам.
[0003] Для приготовления орган-сохраняющей или онкопластической процедуры для молочной железы выполняют предоперационные рисунки на коже пациента, который стоит в вертикальном положении. Очерчивают размер опухоли, а также линии, указывающие будущее положение соска, и линии для надрезов кожи. Эти предоперационные рисунки используются хирургом во время процедуры для ориентации. Для проверки, что запланированные надрезы кожи совместятся друг с другом, их длина может быть измерена с помощью измерительной ленты.
[0004] С описанным выше способом связаны несколько проблем. Полное предоперационное планирование выполняют на коже пациента, что может быть затруднительным для пациента. Планирование выполняют маркером и, таким образом, нанесенный чертеж трудно изменить. Следовательно, испытание различных хирургических подходов является затруднительным. Измерения должны быть выполнены измерительной лентой, следовательно, положение и размер опухоли во время нанесения рисунка известны только примерно. Кроме того, при хирургии головного мозга пациента обычно фиксируют на операционном столе с помощью инвазивного зажима. Голову обычно бреют. Перед началом хирургической операции разметку запланированного надреза выполняют на коже маркером. При стереотаксической хирургии это выполняют с помощью хирургической навигационной системы. Эти системы состоят из компьютера, устройства для измерения положения и отслеживающих инструментов. Обычно, навигационные системы могут использоваться с указывающим инструментом, который обеспечивает возможность указывать участки на теле пациента и видеть положение указывающего инструмента на изображении пациента (например, срезах КТ/МРТ или реконструированном объемном изображении) на экране компьютера.
[0005] Затем оператор пытается найти и указать линию запланированного надреза на теле пациента посредством указывающего инструмента. Во время этой процедуры он смотрит на экран компьютера навигационной системы. Как только он находит точку на линии надреза, он смотрит на пациента и на свою руку с указывающим инструментом, берет маркер и маркирует найденную точку маркером. Эта процедура повторяется до тех пор, пока не будет нанесено достаточное множество точек на запланированной линии надреза, и на коже пациента может быть вычерчена линия, соединяющая маркированные точки. После этой процедуры пациента стерильно закрывают, оставляя свободным операционный участок, и начинают операцию.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0006] Задача настоящего изобретения состоит в обеспечении усовершенствованного хирургического планирования.
[0007] Задача настоящего изобретения решена объектом настоящего изобретения, сформулированным в независимых пунктах формулы изобретения. Дополнительные варианты реализации и преимущества настоящего изобретения включены в зависимые пункты формулы изобретения.
[0008] Описанные варианты реализации также относятся к способу вычисления плана хирургической операции, элементу компьютерной программы, читаемому компьютером носителю и устройству для вычисления плана хирургической операции. Синергетические эффекты могут являться результатом различных сочетаний вариантов реализации, даже если они не описаны подробно.
[0009] Кроме того, следует отметить, что все варианты реализации настоящего изобретения, относящиеся к способу, могут быть выполнены с очередностью этапов, описанной в настоящей заявке, однако это не единственный и существенный порядок выполнения этапов способа. Специалисту будут очевидны все виды различных очередностей выполнения и сочетания описанных в настоящей заявке этапов способа, если явно не указано иное.
[0010] Согласно примеру варианта реализации настоящего изобретения представлен способ вычисления или создания плана хирургической операции. Способ включает этапы, согласно которым принимают данные о поверхности пациента, принимают данные о запланированной хирургической операции и создают представление поверхности участка тела пациента на основании принятых данных о поверхности пациента. Кроме того, способ включает выбор первого хирургического способа из множества параметризованных хирургических способов, хранящихся в базе данных, а также адаптацию геометрических параметров плана хирургической операции на основании выбранного первого хирургического способа, благодаря чему вычисляют адаптированный план хирургической операции. Кроме того, предложенный способ включает этап показа пользователю адаптированного плана хирургической операции.
[0011] Иными словами, представлен способ планирования хирургических операций, который обеспечивает возможность испытания различных хирургических способов путем вычислительного процесса. В частности, может быть визуализирован результат различных хирургических способов резекции целевого объекта, такого как опухоль или патологическое изменение или по меньшей мере участок этой патологии.
[0012] Способ планирования может учитывать геометрические ограничения каждого хирургического способа, который также может быть сохранен в базе данных. Кроме того, этот способ обеспечивает возможность виртуального вычерчивания различных хирургических способов на представлении кожи пациента, в результате чего облегчается принятие усовершенствованного решения. В частности, этот способ может быть выполнен системой для планирования, которая содержит компьютер со средством для визуализации планирования, средство для создания/вычисления геометрического представления поверхности пациента и базу данных параметризованных хирургических способов. Согласно примеру варианта реализации, показанному на ФИГ. 5, описан пример последовательности выполняемых действий такого способа в соответствующей системе, и на ФИГ. 4 показаны различные примеры хирургических способов молочной железы. После ознакомления с приведенным ниже описанием станет очевидно и ясно, что настоящее изобретение может быть использовано, например, в пластической хирургии, онкопластической хирургии, органосохраняющей хирургии для молочной железы и также в других областях хирургии.
[0013] Как будет описано более подробно ниже, данные о поверхности пациента, которые могут быть предоставлены, например, в форме данных, полученных от сканера поверхности и/или от визуализирующего устройства, используются для вычисления представления поверхности участка тела пациента.
[0014] Кроме того, обеспечение базы данных, которая содержит множество хирургических способов, т.е. данных хирургического способа или о хирургическом способе, соответственно, также могут быть включены в предложенный способ. В случае необходимости этап показа пользователю адаптированного плана хирургической операции также может быть частью предложенного способа.
[0015] Термин "операционные данные запланированной хирургической операции или о запланированной хирургической операции" может охватывать различные способы получения этих данных. Например, этот признак может представлять собой характеристику того, какое вмешательство запланировано хирургом, т.е. хирургия молочной железы или хирургия головного мозга. Кроме того, операционные данные включают данные, представляющие целевой объект, например объект, который должен быть резецирован, такой как, например, опухоль или патологическое изменение. Например, операционные данные могут включать точное местоположение опухоли и/или форму опухоли. Следовательно, данные, которые определяют местоположение опухоли и/или форму опухоли, могут рассматриваться как данные запланированной хирургической операции или о запланированной хирургической операции. Однако в случае необходимости извлечения здоровой ткани во время хирургической операции, местоположение и/или форма целевой ткани, которая является здоровой, также могут рассматриваться как один вариант реализации операционных данных о запланированной хирургической операции. В одном примере варианта реализации используются местоположение и/или форма целевого объекта, такого как целевая ткань, или местоположение опухоли. Целевой объект также может быть, например, органом или сосудом пациента.
[0016] Следует отметить, что в контексте настоящего изобретения этапы приема данных также могут быть истолкованы как обеспечение и/или получение соответствующих данных. Кроме того, этап адаптации геометрических параметров плана хирургической операции, как может быть очевидно, включает создание такого плана путем вычисления. Кроме того, также должно быть включено извлечение первоначального плана хирургической операции, например из базы данных или из пользовательского ввода.
[0017] Кроме того, адаптация основана на данных запланированной хирургической операции и созданного представления поверхности. Таким образом, система, которая вычисляет адаптацию геометрических параметров, может, во-первых, учитывать первый хирургический способ, выбранный пользователем, во-вторых, может учитывать операционные данные из запланированной хирургической операции или о запланированной хирургической операции, такие как, например, местоположение опухоли и/или форма опухоли, в-третьих, может учитывать предварительно вычисленное представление поверхности.
[0018] Термин "адаптация геометрических параметров" может подразумевать изменение геометрических параметров в визуализированной форме плана. Вычисление представления поверхности может быть выполнено той же самой системой, которая вычисляет адаптацию, но также и другое устройство или система могут быть использованы для этой цели. Адаптированный операционный план может быть показан пользователю на основании адаптированных геометрических параметров.
[0019] Параметрами хирургического способа и отдельного хирургического плана могут быть, например, один или более углов между линиями резекции, длины линий резекции и/или глубина линий резекции. Кроме того, могут быть использованы конкретные параметры для конкретной задачи. Например, в примере для случая хирургии молочной железы размер ареолы, расстояние между текущим и будущим положениями соска являются параметрами, которые могут быть использованы для геометрического задания хирургического плана в целом. Затем, индивидуальные значения указанных параметров определяют конкретный индивидуальный план хирургической операции. Более подробные описания и детали таких геометрических параметров хирургического плана представлены в приведенных ниже примерах вариантов его реализации со ссылкой на ФИГ. 3 и 4. Указанные параметры адаптируются на основании выбранного хирургического способа. В целом, математические параметры, такие как углы, координаты, и/или параметры, определяющие линии надреза, в частности длина и глубина надреза, могут быть использованы в контексте настоящего изобретения для параметризации хирургических способов и операционных планов.
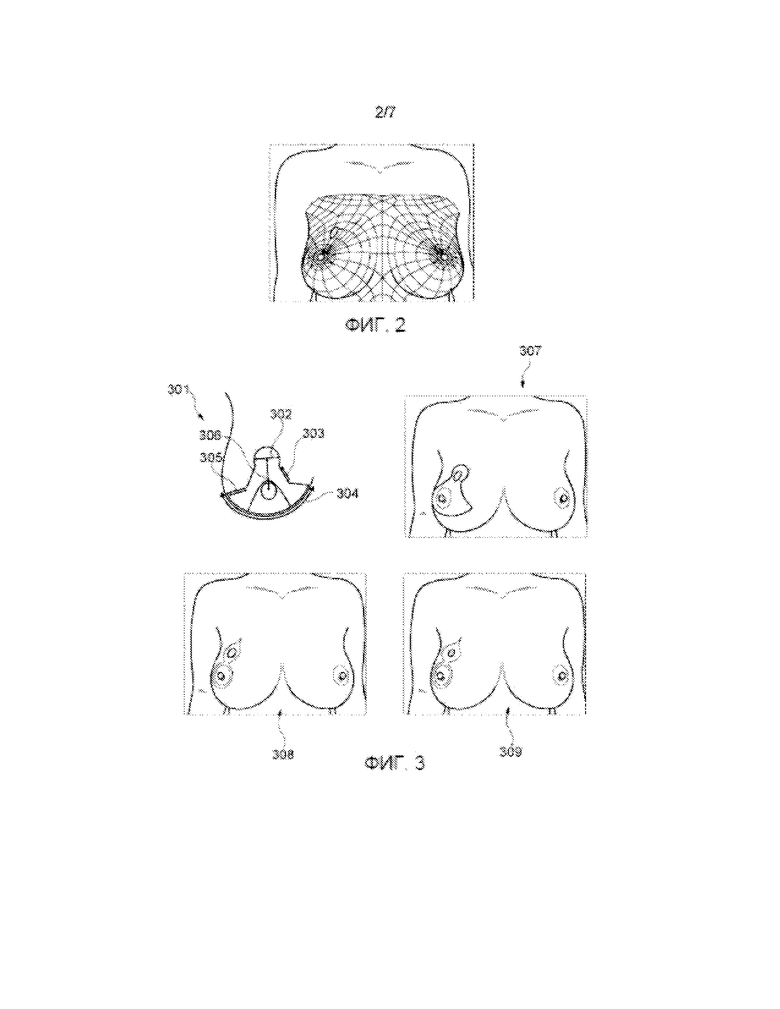
[0020] Геометрические ограничения хирургического способа или плана можно рассматривать как граничные величины или пороговые значения параметра, используемого в конкретном хирургическом способе или плане. Например, в конкретном способе хирургии молочной железы глубина линии надреза не должна превышать некоторого значения, такое как, например, 3 мм. Геометрические ограничения также можно рассматривать как отношения между параметрами плана, как описано со ссылкой на ФИГ. 3. В контексте данного конкретного варианта реализации длина надреза/разреза 304 должна быть равна двойной длине надреза/разреза 305. Кроме того, длина разреза/надреза 306 слева должна быть равна длине разреза/надреза 306 справа. Это можно рассматривать как пример отношений между параметрами хирургического способа в форме геометрических ограничений.
[0021] Согласно еще одному примеру варианта реализации настоящего изобретения по меньшей мере одно геометрическое ограничение первого хирургического способа извлечено от базы данных. Кроме того, способ дополнительно включает этап автоматического учитывания геометрического ограничения первого хирургического способа во время адаптации геометрических параметров плана хирургической операции.
[0022] Примеры таких геометрических ограничений могут показаны на ФИГ. 3. В конкретном варианте реализации длина надреза/разреза 304 должна быть равна двойной длине надреза/разреза 305. Длина разреза/надреза 306 слева должна быть равна длине разреза/надреза 306 справа. Кроме того, длина круглого разреза должна быть равна окружности ареолы.
[0023] Согласно еще одному примерному варианту реализации настоящего изобретения этап создания представления поверхности участка тела пациента включает триангуляцию поверхности и наложение текстуры.
[0024] Иными словами, объемная визуализация поверхности входит в объем защиты настоящего изобретения. Например, исходные данные поверхности пациента первоначально могут быть захвачены, например в форме фотографий или сканограмм поверхности. На основании этих исходных данных путем триангуляции может быть создано представление поверхности. Фотографии, извлеченные из камеры, используются для реалистичного расцвечивания представления поверхности, которое следует понимать в контексте настоящего изобретения как наложение текстуры. Такой подход может повысить точность вычисленного операционного плана.
[0025] Согласно еще одному примеру варианта реализации настоящего изобретения план хирургической операции отображают для пользователя в форме по меньшей мере одной линии надреза кожи в/на созданном представлении поверхности участка тела пациента.
[0026] Будущие линии надреза кожи следует понимать как линии, которые предоставляют хирургу возможность наведения для этапов рассечения кожи тела пациента. Такой подход обеспечивает возможность испытывать различные хирургические способы виртуальным вычерчиванием предоперационного планирование на коже пациента путем вычерчивания и/или проецирования различных результатов на представлении кожи. Например, такие будущие линии надреза кожи могут быть спроецированы на тело пациента для иллюстрации и проверки.
[0027] Согласно еще одному примеру варианта реализации настоящего изобретения план хирургической операции содержит по меньшей мере одну линию будущего надреза кожи на молочной железе пациента, причем созданное представление поверхности описывает форму молочной железы пациента, и способ дополнительно включает этап автоматической адаптации линии будущего надреза кожи согласно плану хирургической операции к форме молочной железы пациента.
[0028] Иными словами, этот вариант реализации можно рассматривать как способ вычисления плана хирургической операции молочной железы, причем необходимый надрез кожи на молочной железе пациента вычислен и показан на представлении поверхности молочной железы пациента.
[0029] Такие линии надреза не только могут быть расположены на поверхности кожи, но также могут иметь некоторое заглубление в тело пациента, т.е., в молочную железу пациента. Например, опухоль может быть описана не только в отношении ее местоположения, но также и в отношении ее формы объемным способом. Это может быть учтено для планирования и вычисления линий надреза в контексте настоящего изобретения.
[0030] Согласно еще одному примеру варианта реализации настоящего изобретения способ включает этапы, согласно которым принимают пользовательский ввод, выполненный с возможностью запуска изменения геометрических параметров плана хирургической операции, и адаптируют геометрические параметры плана хирургической операции на основании принятого пользовательского ввода. Кроме того, способ включает этап показа пользователю адаптированного плана хирургической операции.
[0031] Иными словами, представлен интерактивный анализатор особенностей. Представление поверхности визуализируют, и, затем, характерные точки и линии могут быть идентифицированы в интерактивном режиме хирургом, выполняющим планирование, например посредством пользовательского интерфейса с использованием мыши или другого интерфейсного средства.
[0032] Согласно еще одному примеру варианта реализации способ включает автоматический анализ особенностей.
[0033] Этот этап способа может быть использован для обнаружения особенностей в представлении поверхности, например в случае хирургии молочной железы положения соска, диаметра соска, линии симметрии, положения ключицы, положения расположенной под молочной железой складки. С этой целью может быть использовано соответствующее устройство, анализирующее особенности, как описано в отношении варианта реализации, показанного на ФИГ. 5.
[0034] Согласно еще одному примеру варианта реализации настоящего изобретения сканируют участок тела пациента посредством сканера поверхности и захватывают фотографию участка тела пациента, обеспечивая, таким образом, данные о поверхности пациента.
[0035] Различные аспекты сканирования поверхности, захвата фотографии, инсталляции, калибровки, генерации планирующего ввода и передачи хирургического плана подробно описаны ниже. Данные, генерируемые процессом сканирования и процессом фотографии, могут быть использованы для триангуляции и наложения текстуры. На основании эти данные может быть вычислено представление поверхности. Более подробно этот аспект настоящего изобретения описан в контексте конкретных вариантов реализации, в частности, со ссылкой на ФИГ. 2, 5, 6 и 7.
[0036] Согласно еще одному примеру варианта реализации настоящего изобретения выбирают второй хирургический способ из множества хирургических способов, хранимых в базе данных. Кроме того, способ включает этапы, согласно которым адаптируют геометрические параметры плана хирургической операции на основании второго выбранного хирургического способа и показывают пользователю план хирургической операции в форме по меньшей мере одной линии будущего надреза кожи, показанного в/на созданном представлении поверхности молочной железы пациента.
[0037] Иными словами, представлена интерактивная методика сканирования, посредством которой пользователь может последовательно выбрать по меньшей мере два различных хирургических способа и может оценить первый и второй способы на основании показанного соответствующего хирургического плана. Такой итеративный аспект настоящего изобретения описан помимо прочего в отношении варианта реализации, показанного на ФИГ. 5.
[0038] Согласно еще одному примеру варианта реализации настоящего изобретения способ включает этап, согласно которому задают положение целевого объекта (т.е. позицию целевого объекта) и/или границу резекции целевого объекта в интерактивном режиме, или импортируют положение целевого объекта и/или границы резекции целевого объекта из рабочей станции.
[0039] Этот этап можно рассматривать как часть этапа приема данных о запланированной хирургической операции, как описано выше. Пользователь может определить или обеспечить такой ввод, например, в форме положения целевого объекта различными способами и посредством различных устройств. Могут быть использованы предоперационный набор данных изображения, например магниторезонансная визуализация или компьютерная томография, как описано со ссылкой на ФИГ. 5, но пользователь также может обеспечить координаты целевого объекта в числовом формате как набор данных. Также, могут быть использованы другие варианты ввода. Целевой объект также может относиться к различным органам или структурам, таким как структура ткани, и может быть визуализирован в вычисленном представлении поверхности. В частности, могут быть визуализированы ткани, которые расположены под поверхностью кожи.
[0040] Положение целевого объекта, т.е. позицию целевого объекта, можно рассматривать как положение органа или форму органа, положение патологического изменения, форму патологического изменения, и объекты также можно рассматривать как ткань или сосуд тела. Кроме того, положение органа, форма органа, положение патологического изменения и/или форма патологического изменения могут быть заданы в интерактивном режиме.
[0041] Согласно еще одному примеру варианта реализации настоящего изобретения способ включает этап проецирования адаптированного плана хирургической операции на участок тела пациента.
[0042] Таким образом, хирургический план может быть перенесен на тело пациента путем проецирования. В проецирующей вычислительной программе могут быть использованы данные из сканограммы поверхности тела пациента и также может быть использована калибровочная информации для вычисления проекции хирургического плана на поверхность пациента. Более подробно этот аспект описан со ссылкой на ФИГ. 6 и 7. Следует отметить, что данный вариант реализации может быть использован в соответствии со способом вычисления, как описано выше и ниже. Однако способ также включает проецирование хирургического плана, который создан несколько иначе. Это также является справедливым для аспектов проецирования, описанных со ссылкой на ФИГ. 6 и 7.
[0043] Геометрические свойства или характеристики проектора должны быть известны, т.е., пользователю должно быть известно, какой луч (который может быть определен направлением и исходной точкой в пространстве) используется в проекторе для проецирования конкретного пикселя изображения. Это может быть определено соответствующим калибровочным способом. Также должны быть известны положение и ориентация пациента относительно проектора. Это может быть определено измерением посредством сканера поверхности. В предпочтительном варианте реализации, описанным в настоящей заявке, сканер поверхности и проектор обеспечены вместе в едином устройстве таким образом, что геометрические параметры являются неизменными и должны быть определены только один раз. Затем, положение и ориентация поверхности пациента, подлежащей/используемой в плане хирургической операции, могут быть адаптированы к измеренной поверхностипациента на этапе оптимизации. Таким образом, положение разрезов/надрезов в пространстве относительно проектора являются известными, и вычисление изображения, которое должно проецироваться, является менее сложным и в то же время обеспечивает правильное отображение хирургического оперативного плана на пациенте.
[0044] В сочетании с таким проецированием может быть использован нанесенный на тело пациента фосфоресцирующий материал, который затем возбуждают светом проецирования, и пользователь может использовать преимущество возбужденных и светоизлучающих молекул на коже пациента, отображающих хирургический план. Такой подход может облегчить усовершенствованный перенос вычисленного плана на кожу пациента.
[0045] Согласно еще одному примеру варианта реализации настоящего изобретения способ включает этапы сканирования поверхности участка тела пациента сканером поверхности и, таким образом, генерирования данных о поверхности, т.е. данных о поверхности тела пациента.
[0046] Согласно еще одному примеру варианта реализации настоящего изобретения способ включает вычисление проекционных данных для проецирования адаптированного плана хирургической операции на участок тела пациента на основании данных о поверхности.
[0047] В соответствующем примере варианта реализации предложено устройство или система, как показано на ФИГ. 7, с использованием которого может быть реализован данный способ. Предпочтительно данный способ обеспечивает перенос проецируемого и адаптированного плана хирургической операции на тело пациента путем маркирования, которое, таким образом, увеличивает точность переноса вычисленного плана на тело пациента.
[0048] Согласно еще одному примеру варианта реализации настоящего изобретения сигнал активации передают маркеру, выполненному с возможностью дистанционной активации, и, таким образом, чтобы активировать маркер на основании адаптированного плана хирургической операции.
[0049] Например, управляющий блок, описанный в настоящей заявке, может быть выполнен с возможностью активирования маркера, если измеренное положение маркера согласовано с линией или соответствует линии, заданной в адаптированном плане хирургической операции. Иными словами, может быть использовано автоматическое чертежное устройство, которое предоставляет хирургу возможность облегченного вычерчивания предоперационного компьютеризированного плана на коже пациента на основании предварительно вычисленного оперативного плана и в соответствии с этим планом. Таким образом, отслеживаемый и активируемый маркер используется для вычерчивания линии надреза на коже пациента. Таким образом, выполнение рисунка запланированной линии надреза на коже пациента может быть осуществлено намного легче, быстрее и точнее. Таким образом, маркер может вычерчивать линии только в местах, которые соответствуют заданному плану хирургической операции. Соответствующий пример маркера и устройства/системы для генерации сигнала и переноса на основании местоположения маркера и вычисленного плана показан и описан со ссылкой на ФИГ. 9. Такая система автоматически создает рисунок (или объемное представление поверхности) вычисленного хирургического плана на коже пациента с высокой точностью.
[0050] Следует отметить, что этот вариант реализации может быть использован в соответствии со способом вычисления, описанным выше и ниже. Однако способ также включает использование данной дистанционной активации маркера на основании положения маркера в сочетании с хирургическим планом, который обеспечен иным способом.
[0051] Согласно еще одному примеру варианта реализации настоящего изобретения измеряют положение маркера на поверхности пациента и активируют маркер, если измеренное положение маркера соответствует линии адаптированного плана хирургической операции.
[0052] Этот способ может быть реализован устройством, которое измеряет позиции и создает чертеж или объемные представления поверхности плана хирургической операции. Планирование надрезов может быть осуществлено на основании изображения тела пациента или может быть выполнено способом, описанным в настоящей заявке. Для вычерчивания линии надреза может быть использован отслеживаемый и активируемый маркер. Положение отслеживаемого и активируемого маркера может быть измерено измеряющим позицию устройством. В этом отношении, маркер заменяет указывающий инструмент известной навигационной системы. Кроме того, в этом варианте реализации настоящего изобретения, вычерчивающая функция активного маркера может быть включена и выключена устройством, которое содержит передатчик. Программное обеспечение может управлять кончиком устройства таким способом, что всякий раз, когда кончик активного маркера находится на линии надреза, включается вычерчивание. И всякий раз, когда кончик не находится на линии надреза, вычерчивание выключается посредством передатчика. Пример варианта реализации такой системы показан и описан со ссылкой на ФИГ. 9.
[0053] Согласно еще одному примеру варианта реализации настоящего изобретения способ включает активирование втягивающего блока маркера.
[0054] Согласно еще одному примеру варианта реализации настоящего изобретения представлено устройство для вычисления плана хирургической операции. Устройство содержит приемный блок для приема данных о поверхности пациента и данных о запланированной хирургической операции. Кроме того, устройство содержит вычислительный блок, отображающее устройство, интерфейс и базу данных. Вычислительный блок выполнен с возможностью создания представления поверхности участка тела пациента на основании принятых данных о теле пациента. Кроме того, интерфейс выполнен с возможностью приема пользовательского ввода, который является выбором первого хирургического способа из множества параметризованных хирургических способов, хранимых в базе данных. Кроме того, вычислительный блок выполнен с возможностью адаптации геометрических параметров плана хирургической операции на основании выбранного первого хирургического способа и вычисления адаптированного плана хирургической операции. Кроме того, отображающее устройство выполнено с возможностью показа пользователю адаптированного плана хирургической операции.
[0055] Примеры вариантов реализации такого устройства описаны более подробно со ссылкой на ФИГ. 5, 7, 8 и 9. В целом, такие устройства могут быть сконфигурированы пользователем для реализации различных описанных в настоящей заявке способов.
[0056] Согласно еще одному примеру варианта реализации настоящего изобретения, устройство содержит сканер поверхности и проецирующее устройство. Сканер поверхности выполнен с возможностью сканирования поверхности участка тела пациента и, таким образом, генерирования информации о поверхности. Проецирующее устройство выполнено с возможностью проецирования адаптированного плана хирургической операции на участок тела пациента.
[0057] Больше подробно эти устройства описаны со ссылкой на ФИГ. 6 и 7, и в настоящей заявке также описаны аспекты соответствующих вариантов реализации способа.
[0058] Согласно еще одному примеру варианта реализации настоящего изобретения устройство выполнено с возможностью активации маркера, выполненного с возможностью дистанционной активации, на основании адаптированного плана хирургической операции.
[0059] Иными словами, необходимый и вычисленный план хирургической операции может быть использован в качестве основания для активации маркера, выполненного с возможностью дистанционной активации, с учетом текущей позиции маркера. Иными словами, функции черчения маркера могут быть включены и выключены посредством этого устройства. Это устройство может управлять кончиком маркера таким способом, что всякий раз, когда кончик маркера находится на линии надреза при перемещении поверх кожи пациента, функция черчения включается. И всякий раз, когда маркер не находится на линии надреза, функция черчения включается.
[0060] В одном примере варианта реализации устройство содержит передатчик, маркер, выполненный с возможностью дистанционной активации, с приемником и управляющий блок. Таким образом, маркер реализован отдельно от остальной части устройства. Управляющий блок выполнен с возможностью управления передатчиком таким образом, что передатчик передает сигнал активации приемнику маркера и, таким образом, активирует маркер на основании адаптированного плана хирургической операции и на основании текущей позиции маркера.
[0061] Иными словами, в одном примере варианта реализации представлена система для вычисления плана хирургической операции. Система содержит устройство, описанное выше и ниже, причем устройство дополнительно содержит передатчик и управляющий блок. Эта система дополнительно содержит маркер, выполненный с возможностью дистанционной активации и который содержит приемник. Кроме того, управляющий блок выполнен с возможностью управления передатчиком таким образом, что передатчик передает сигнал активации приемнику маркера, выполненного с возможностью дистанционной активации, и, таким образом, активирует маркер на основании адаптированного плана хирургической операции. Более подробные и конкретные варианты реализации этой системы описаны и объяснены со ссылкой на ФИГ. 9.
[0062] Согласно еще одному примеру варианта реализации настоящего изобретения способ включает использование фосфоресцирующего материала, например порошка или геля, нанесенного на кожу пациента, для удерживания видимого изображения проецируемого хирургического плана после завершения проецирования.
[0063] Ниже описана возможная последовательность выполняемых действий для копирования сгенерированного компьютером плана на кожу пациента согласно настоящему изобретению. Компьютеризированный хирургический план разрабатывают в автоматическом или интерактивном режиме и адаптируют к анатомии пациента согласно описанным в настоящей заявке способам и устройствам. Пациента подготавливают путем нанесения на молочную железу фосфоресцирующего порошка или прозрачного геля, содержащего такой порошок. Также могут быть использованы другие фосфоресцирующие материалы.
[0064] Например, может быть использован имеющийся в продаже нетоксичный "Порошок европия с ультраярким свечением" (Europium UltraGlow Powder), но также и другие материалы являются подходящими для описанной в настоящей заявке цели. Проецирующее устройство используют для проецирования плана в течение короткого момента времени с высокой интенсивностью на тело пациента. В качестве альтернативы, проецирующее устройство может быть модифицировано путем встраивания в него лазерного устройства, отслеживающего линии, содержащиеся в хирургическом плане. Для активирования фосфоресцирующего порошка может быть использован ультрафиолетовый лазер. Также, для активирования фосфоресцирующего материала могут быть использованы другие источники света. На участках линий и маркеров, содержавшихся в хирургическом плане, фосфоресцирующий порошок активируется ультрафиолетовым лазером или ультрафиолетовым компонентом, содержавшимся в лучах используемого проецирующего план проектора.
[0065] После активации фосфоресцирующего порошка спроецированные маркеры остаются видимыми на участках кожи пациента, даже если пациент перемещается или если молочная железа деформирована. Такое видимое состояние плана может быть создано только в течение ограниченного срока и в затемненном помещении. Для постоянной видимости план может быть дорисован самим хирургом с использованием постоянного маркера.
[0066] В качестве существа настоящего изобретения может быть рассмотрена предложенная система для планирования хирургических операций, которая позволяет хирургу выполнять дооперационное планирование с использованием компьютера. Такой подход позволяет испытывать различные хирургические способы путем их виртуального вычерчивания на коже. Система может автоматически учитывать геометрические ограничения хирургических планов. В другом аспекте настоящего изобретения предложена система для планирования и проецирования хирургических операций, которая обеспечивает дополнительную возможность облегченного переноса результата планирования из компьютера в форме чертежей на кожу пациента. В другом аспекте настоящего изобретения маркер, выполненный с возможностью дистанционной активации, активируют на основании текущей позиции маркера и на основании вычисленного оперативного плана таким образом, что вычисленный план может быть передан маркером на кожу путем управляемого маркирования.
[0067] Эти и другие особенности настоящего изобретения станут очевидными из подробного описания вариантов реализации, приведенного ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
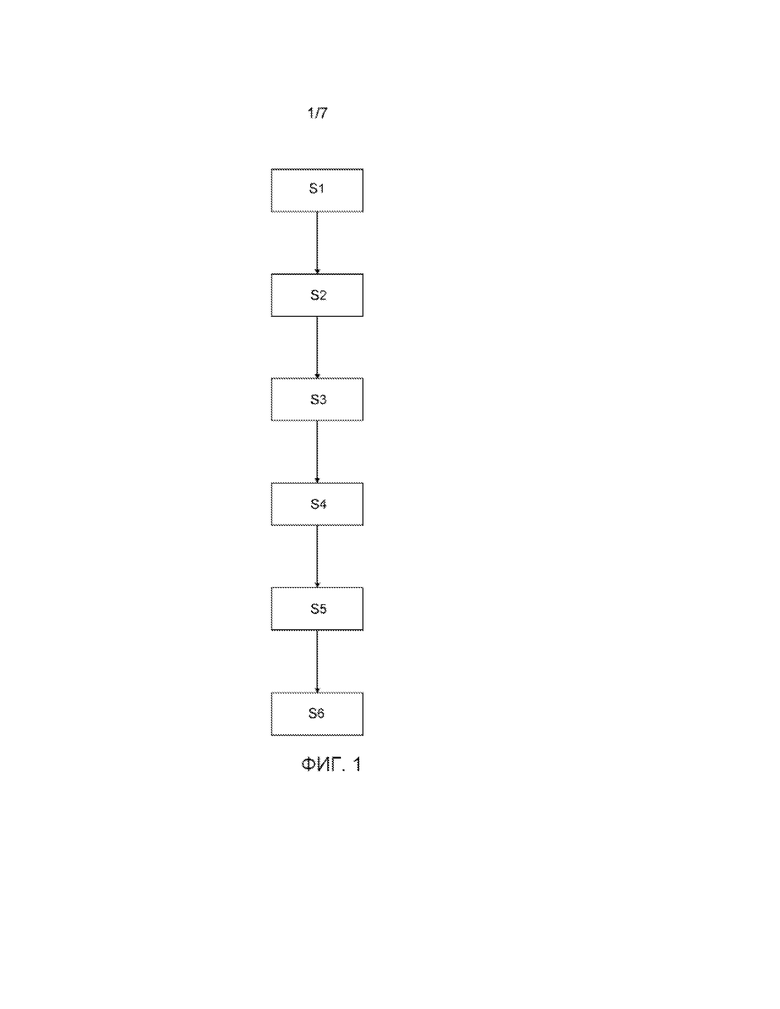
[0068] На ФИГ. 1 схематично показана блок-схема способа вычисления плана хирургической операции согласно примеру варианта реализации настоящего изобретения.
[0069] На ФИГ. 2 показан пример объемной визуализации поверхности с наложением текстуры согласно примеру варианта реализации настоящего изобретения.
[0070] На ФИГ. 3 схематично показано, каким образом хирургический план может быть геометрически параметризован для использования в одном примере реализации настоящего изобретения.
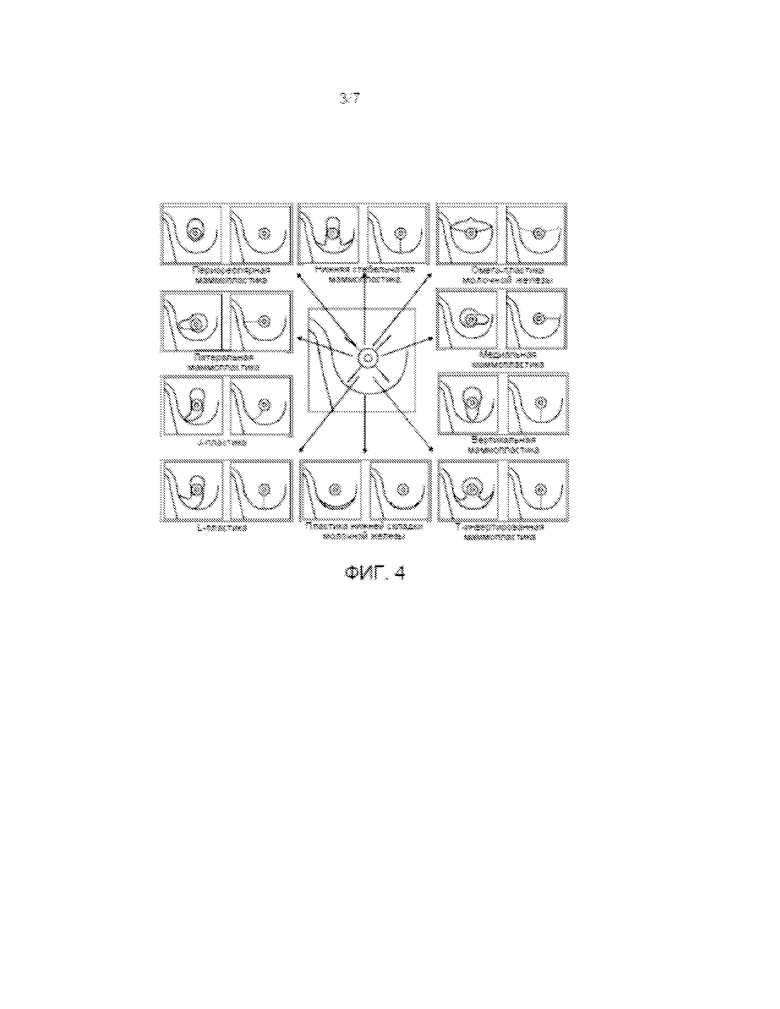
[0071] На ФИГ. 4 схематично показаны множество способов хирургии молочной железы, которые могут быть сохранены в базе данных в соответствии с настоящим изобретением.
[0072] На ФИГ. 5 показана последовательность выполняемых действий в устройстве в соответствии с примером варианта реализации настоящего изобретения.
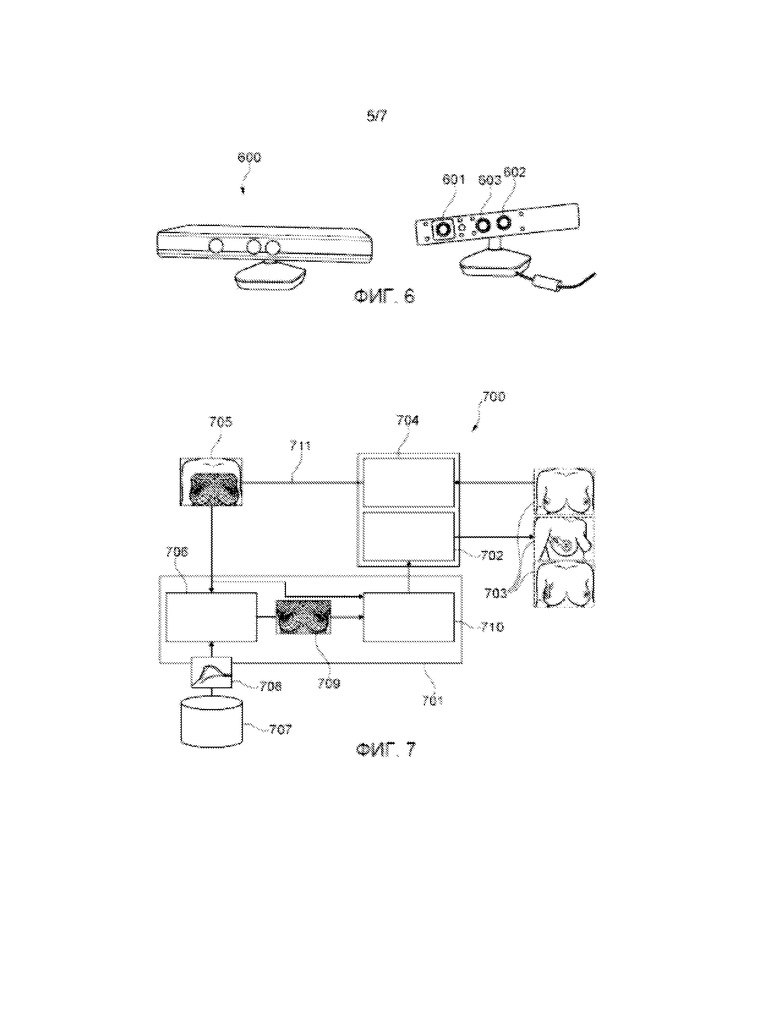
[0073] На ФИГ. 6 схематично показано устройство, содержащее сканер и проектор согласно одному примеру варианта реализации настоящего изобретения.
[0074] На ФИГ. 7 схематично показано устройство со сканером и проектором и последовательность выполняемых действий согласно еще одному примеру варианта реализации настоящего изобретения.
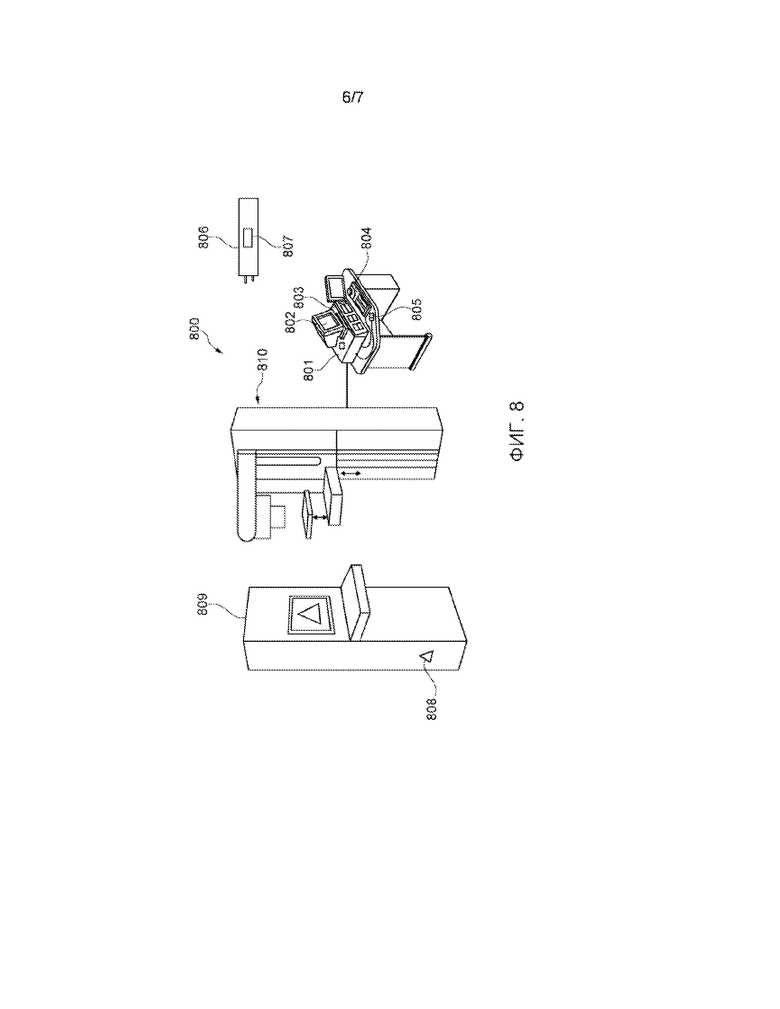
[0075] На ФИГ. 8 схематично показано устройство согласно еще одному примеру варианта реализации настоящего изобретения.
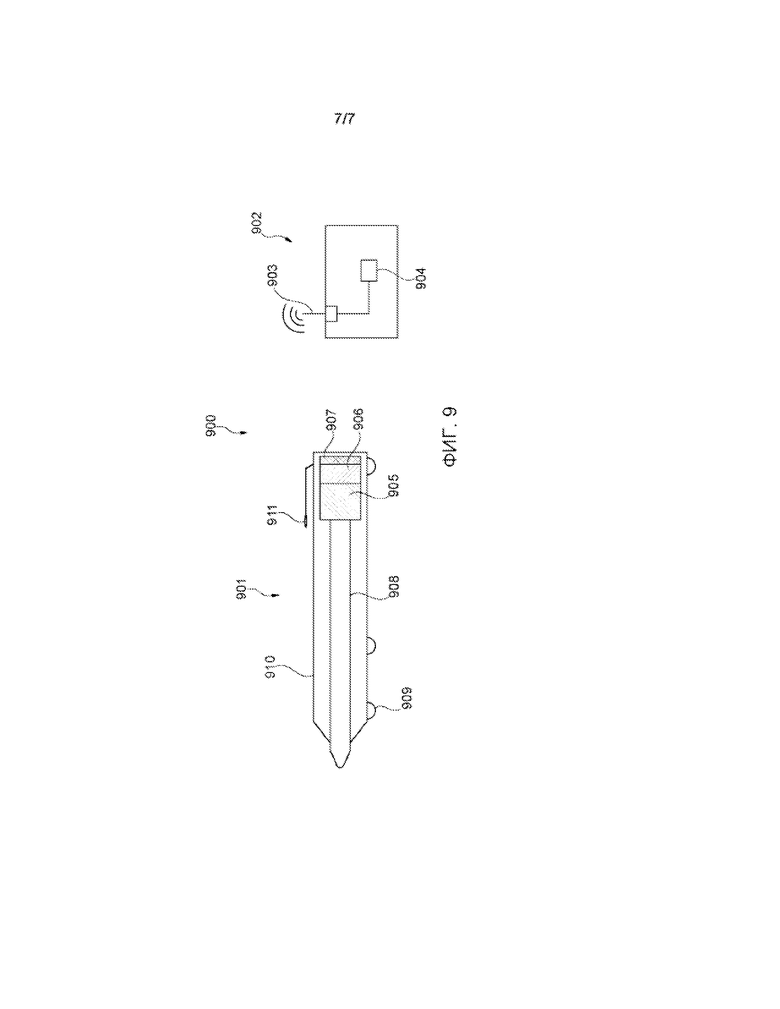
[0076] На ФИГ. 9 схематично показано устройство с маркером, выполненным с возможностью дистанционной активации, в соответствии с еще одним примером варианта реализации настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0077] На ФИГ. 1 показана блок-схема способа вычисления плана хирургической операции согласно примеру варианта реализации настоящего изобретения. На этапе S1 принимают, обеспечивают или извлекают данные о поверхности пациента и на этапе S2 обеспечивают или извлекают данные о запланированной хирургической операции. Кроме того, на этапе S3 создают представление о поверхности участка тела пациента на основании принятых данных. На этапе S4 выбирают первый хирургический способ из множества параметризованных хирургических способов, которые сохранены в базе данных, и на этапе S5 адаптируют геометрические параметры плана хирургической операции на основании выбранного первого хирургического способа. Кроме того, предложенный способ также включает этап S6, на котором пользователю показывают адаптированный план хирургической операции.
[0078] Ниже описан конкретный пример этого варианта реализации в области хирургии молочной железы. Исходные данные о поверхности пациента захватывают в форме фотографий и/или сканируют поверхность. Затем создают представление о поверхности грудной клетки и молочных желез с использованием триангуляции. К этому представлению добавляют характерные точки, такие как, например положения соска, диаметр соска, линия симметрии, положение ключицы, положение расположенной под молочной железой складки и/или данные об опухоли, такие как положение опухоли, и/или также могут быть добавлены границы резекции. Это может быть сделано в интерактивном режиме пользователем или автоматически устройством с использованием анализатора формы и элементов изображения. Затем, хирург запускает выбор хирургического способа из базы данных, причем выбор выполняется системой. Геометрические параметры соответствующего плана адаптируют и представляют в параметризованном виде. Если хирург удовлетворен результирующим планом, он может быть визуализирован и сохранен для передачи в операционную. На ФИГ. 5 подробно показаны примеры этапов одного варианта реализации.
[0079] Ниже описан другой конкретный пример варианта реализации, показанного на ФИГ. 1. Этот пример относится к захвату изображения поверхности пациента и проектированию результата планирования назад на эту поверхность, например посредством вышеуказанного устройства. Затем, для переноса плана на кожу тела пациента могут быть использованы фосфоресцирующие материалы, как описано в настоящей заявке. Также используются объединенные сканер поверхности и проектор, т.е. проекционное устройство. Если используется сканер поверхности, проектор предпочтительно может быть пикопроектором. Предпочтительно сканер и проектор встроены в одно устройство. Во время первичной процедуры регистрируют информацию о поверхности и строении ткани тела пациента. После вычисления или выбора хирургический план может быть передан пациенту. Поверхность повторно сканируют, и данные сканирования объединяют с выбранным хирургическим планом. Информацию, дополнительно объединенную с калибровочной информацией, вновь проецируют на поверхность тела пациента. Затем, хирург может маркировать поверхность маркером и, таким образом, перенести спроецированный и адаптированный план хирургической операции на тело пациента путем маркирования. Как описано в настоящей заявке, также может быть использован маркер, выполненный с возможностью дистанционной активации, или фосфоресцирующий материал, нанесенный на тело пациента.
[0080] Кроме того, согласно другому примеру варианта реализации настоящего изобретения, подобного показанному на ФИГ. 1, способ включает этап переноса проецируемого адаптированного плана хирургической операции на тело пациента маркировкой.
[0081] Другой конкретный пример варианта реализации, показанного на ФИГ. 1, может быть описан следующим образом. На основании вычисленного плана хирургической операции, т.е., адаптированного хирургического плана, полученного после одного или большего количества итерационных этапов способа, маркер, выполненный с возможностью дистанционной активации, активируют в зависимости от его текущей позиции. Более подробно этот аспект показан, например на ФИГ. 9.
[0082] Кроме того, способ, показанный на ФИГ. 1, также может включать этапы, на которых локализуют положение целевого объекта тела пациента в созданном представлении поверхности и визуализируют локализованное положение целевого объекта в созданном представлении поверхности.
[0083] Кроме того, в способе, показанном на ФИГ. 1, могут быть использованы, например следующие хирургические способы, которые не должны быть истолкованы как ограничение вариантов реализации в настоящей заявке. Множество хирургических способов могут быть выбраны из группы, содержащей периареолярную маммопластику, нижнюю стебельчатую маммопластику, омега-пластику молочной железы, латеральную маммопластику, медиальную маммопластику, J-пластику, вертикальную маммопластику, L-пластику, пластику нижней складки молочной железы, Т-инвертированную маммопластику, batwing-способ (в виде крыла летучей мыши) и любую комбинацию вышеуказанного. Разумеется, могут быть использованы и другие операционные способы и хирургические способы, поддающиеся параметризации. Принцип параметризации подробно описан в настоящей заявке, например со ссылкой на ФИГ. 3 и 4.
[0084] Кроме того, настоящее изобретение содержит элемент программы для вычисления плана хирургической операции и читаемый компьютером носитель, в котором сохранена компьютерная программа для вычисления плана хирургической операции. Эти варианты реализации соответствуют способу, описанному выше, в частности, со ссылкой на ФИГ. 1.
[0085] Указанный элемент компьютерной программы может быть частью компьютерной программы, но также может быть отдельной программой. Например, элемент компьютерной программы может быть использован для обновления уже существующей компьютерной программы согласно настоящему изобретению. Компьютерная программа может быть сохранена/распределена на подходящем носителе, таком как оптическое накопительное устройство или твердотельный носитель, поставляемый вместе с другими аппаратными средствами или в качестве части других аппаратных средств, но также может быть обеспечен в другими способами, такими как посредством сети Интернет или других проводных или беспроводных телекоммуникационных систем.
[0086] Читаемый компьютером носитель может рассматриваться как накопительное устройство, такое как, например USB-накопитель, CD, DVD, устройство для хранения данных, жесткий диск или любой другой носитель, на котором может быть сохранен элемент программы, описанный выше. Одиночный процессор или другой блок могут выполнять функции нескольких изделий или этапов, описанных в пунктах приложенной формулы. Примеры такого элемента программы для вычисления плана хирургической операции и читаемого компьютером носителя, в частности, дополнительно показаны и/или описаны со ссылкой на ФИГ. 5, 7 и 8.
[0087] На ФИГ. 2 схематично показан пример того, как выглядит объемная визуализация поверхности с наложением текстуры на представлении поверхности пациента. Такое представление поверхности пациента используется в контексте варианта реализации, показанного на ФИГ. 5. На ФИГ. 3 показаны положение соска и размер околососковой ареолы, срединная линия сагиттальной симметрии и опухоль.
[0088] На ФИГ. 3 схематично показан пример того, как план хирургической операции может быть параметризован геометрически. На изображении 301 стрелки 302-306 показывают длину, ориентацию и углы геометрических элементов плана, который может быть адаптирован во время планирования. Эти адаптации могут быть вызваны посредством пользовательского ввода или могут быть осуществлены автоматическим вычислением с учетом предоставленных данных о поверхности пациента и данных о запланированной хирургической операции. На ФИГ. 3 показан, как может выглядеть по меньшей мере одно геометрическое ограничение. Примеры таких геометрических ограничений показаны на ФИГ. 3. В конкретном варианте реализации длина надреза/разреза 304 должна быть в два раза больше длины надреза/разреза 305. Длина разреза/надреза 306 слева должна быть равна длине разреза/надреза 306 справа. Кроме того, длина круглого разреза должна равняться окружности ареолы. Изображение 307 является визуализированным вычисленным хирургическим оперативным планом, который проецируют или наносят маркированием на кожу пациента. На изображении 307 из множества сохраненных способов хирургом выбран первый хирургический способ. Изображения 308 и 309 являются визуализацией другого хирургического способа, отличающегося показанного на изображении 307. Различие между изображениями 308 и 309 состоит в различной параметризации соответствующих хирургических планов.
[0089] На ФИГ. 4 схематично показаны различные хирургические способы хирургии молочной железы. Эти примеры не должны быть истолкованы как ограничение таких способов хирургии молочной железы. Множество способов хирургии молочной железы включают периареолярную маммопластику, нижнюю стебельчатую маммопластику, омега-пластику молочной железы, латеральную маммопластику, медиальную маммопластику, J-пластику, вертикальную маммопластику, L-пластику, пластику нижней складки молочной железы, Т-инвертированную маммопластику, batwing-способ (в виде крыла летучей мыши). Эти способы также могут быть объединены хирургом и вычислительным устройством. Способы хирургии молочной железы, показанные на ФИГ. 4, известны специалисту и все они могут быть параметризованы на основании принципов, описанных выше со ссылкой на ФИГ. 2 и 3.
[0090] На ФИГ. 5 схематично показана блок-схема устройства 500 для вычисления плана хирургической операции в соответствии с настоящим изобретением. Устройство 500 обеспечивает возможность испытания различных хирургических способов путем их виртуального вычерчивания на коже. Система автоматически учитывает геометрические ограничения хирургических планов, как описано ниже. Устройство представляет собой систему для планирования, которая содержит компьютер со средством для визуализации планирования, средство для создания геометрического представления поверхности пациента и базу данных параметризованных хирургических способов. В не ограничивающем примере случая онкопластической хирургии молочной железы последовательность выполняемых действий конкретного варианта реализации, показанная на ФИГ. 5, является следующей. Первоначально, захватывают исходные данные о поверхности пациента, например в виде фотографии 504 и/или сканограммы 503 поверхности с использованием сканер 501 поверхности и/или камеры 502. Это может быть осуществлено несколькими способами, например фотографированием с различных углов или с помощью выделенной системы для сканирования поверхности, подобной, например датчику Kinect компании Microsoft. Этот датчик обеспечивает возможность измерения карты глубин наряду с фотографией. Кроме того, устройство 500 снабжено процессором 505 формы. Затем, создают представление поверхности грудной клетки пациента. Таким образом, на основании исходных данных, полученных на этапе 1, создают, представление 506 поверхности с использованием известной специалисту триангуляции. Фотографии, извлеченные из камеры, используются для реалистичного расцвечивания представления поверхности, т.е. с применением наложения текстуры. Следует отметить, что изображение 506 согласно данному примеру варианта реализации, показываемое хирургу, также в качестве примера показано на ФИГ. 2, причем данное изображение может быть сформировано таким образом, что хирург может изменить угол перспективы и расстояние до показываемого объекта. Изображение 506 используется для демонстрации различия между фотографиями и объемными моделями с наложением текстуры.
[0091] Кроме того, описанные выше этапы 1 и 2 могут быть осуществлены иначе, при условии, что результатом исходного сбора данных и предварительной обработки формы является триангуляция поверхности молочных желез пациента и грудной клетки с наложением текстуры. Следует отметить, что способ также может быть реализован без наложения текстуры, однако наложение текстуры может улучшить иллюстрацию. Анализатор 507 формы и элементов изображения является компонентом устройства, который используется для обнаружения особенностей в представлении поверхности, например положения соска, диаметра ареолы, линии симметрии, положения ключицы, положения расположенной под молочной железой складки, и т.п. Однако устройство также может быть обеспечено без анализатора 507 формы и элементов изображения. Анализатор элементов изображения может быть автоматическим или интерактивным. В случае интерактивного варианта реализации представление поверхности визуализировано например на экране 508 компьютера. Затем, выполняющий планирование хирург идентифицирует характерные точки и линии в интерактивном режиме, например посредством пользовательского интерфейса на основе мыши. Кроме того, положение опухоли и/или границы резекции опухоли определяют в интерактивном режиме или импортируют из другой рабочей станции 511. Таким образом, на этапе 509, показывают локализацию опухоли. В случае необходимости могут быть использованы предоперационный набор 510 данных изображения, например магниторезонансная визуализация или компьютерная томография. Эскиз результата выполнения описанных выше этапов показывают на экране 512.
[0092] Кроме того, на этапе 513 устройство может автоматически выбрать один из параметризованных хирургических способов 515, сохраняемых в базе 514 данных. Альтернативно, выбор может быть сделан хирургом. Согласно данному варианту реализации в данном случае выбран способ 516. Неограничивающие примеры таких способов представлены на ФИГ. 4, и описана примерная параметризация, например со ссылкой на ФИГ. 3. Выбор наилучшего хирургического способа может зависеть от нескольких факторов, таких как размер и местоположение опухоли, размер молочной железы, форма молочной железы, возраста пациента, предпочтения пациента, и т.п. После выбора способа или способов геометрические параметры соответствующего плана хирургической операции адаптируют на этапе 518 посредством устройства согласно настоящему изобретению. Хирургические способы/планы представлены в параметризованной форме, как показано в качестве примера на ФИГ. 3. Форму линий разрезов (надрезов) адаптируют к форме молочной железы пациента посредством устройства. Результаты после адаптации показывают пользователю на экране 519. В данном случае, пользователю показаны две различные адаптации параметров хирургического оперативного плана. Если необходимо, хирург также может (дополнительно или альтернативно) изменить в интерактивном режиме геометрические параметры хирургического плана вводом данных посредством пользовательского интерфейса. В этом примере параметрами являются размер ареолы, расстояние между текущим и будущим положением соска, углы между линиями резекции, длины линий резекции и глубина резекции. Специалист также может использовать другие параметры, которые он сочтет подходящими для конкретного случая. Кроме того, если хирурга устраивает результирующий хирургический план 519, он может быть визуализирован и сохранен на этапе 521 с показом пользователю конечного хирургического плана в различных перспективных видах 522, 524 и с использованием базы 523 данных. Затем, могут быть выполнены анализ, обсуждение с пациентом и/или передача плана в операционную. Таким образом, на этапе 520 определяют, является или не является удовлетворительным результат вычисления на основании предыдущего выбора хирургического способа и на основании описания основного индивидуального случая (посредством представления поверхности и принятых данных о запланированной операции). Если этот результат хирурга не устраивает, может быть выбран другой хирургический способ, и предыдущие этапы, начиная с этапа 513 выбора, должны быть повторены.
[0093] В другом примерном варианте реализации представлено устройство, которое также позволяет выполнить такую процедуру, как описанная со ссылкой на ФИГ. 5. Такое устройство может быть реализовано, как показано на ФИГ. 8. Это устройство выполнено с возможностью вычисления плана хирургической операции и содержит приемный блок (для приема данных о поверхности пациента и данных о местоположении опухоли и/или форме опухоли в качестве примера данных о запланированной операции), вычислительный блок, отображающее устройство и пользовательский интерфейс. Вычислительный блок выполнен с возможностью создания представления поверхности участка тела пациента на основании принятых данных, и пользовательский интерфейс сконфигурированы для приема пользовательского ввода, который является выбором первого хирургического способа из множества параметризованных хирургических способов, сохраненных в базе данных. Кроме того, вычислительный блок выполненный с возможностью адаптации геометрических параметров плана хирургической операции на основании выбранного первого хирургического способа. Также, отображающее устройство выполнено с возможностью отображения для пользователя адаптированного плана хирургической операции на основании адаптированных геометрических параметров. Это устройство может рассматриваться как система для планирования хирургических операций, предоставляющая хирургу возможность выполнения дооперационного планирования и вычерчивания с использованием компьютера. Такой подход позволяет испытывать различные хирургические способы путем их виртуального вычерчивания на коже. Система автоматически учитывает геометрические ограничения хирургических планов.
[0094] На ФИГ. 6 показан сканер 600 поверхности, содержащий проектор 601, который проецирует структурированный инфракрасный (ИК) свет на участок тела пациента и представляет собой устройство согласно настоящему изобретению. Сканер может быть использован в сочетании с устройством, описанным со ссылкой на ФИГ. 1, 5 и 8, но также может быть использован независимо от него. Отраженный свет проектора обнаруживается инфракрасной камерой 602. Поверхность объекта вычисляется триангуляцией. Одновременно, RGB-камера 603, работающая в видимом световом спектре захватывает цвета поверхности кожи пациента. Если используется наложение текстуры, может быть предоставлено полное объемное изображение. Этот пример сканера поверхности является неограничивающим и может быть использован в различных вариантах реализации настоящего изобретения, описанных в настоящей заявке.
[0095] На ФИГ. 7 показана блок-схема устройства 700 для вычисления плана хирургической операции и для проецирования необходимого плана назад на участок поверхности пациента, которые подверглись анализированию. Таким образом может быть реализована планирующая и проекционная система для хирургических операций, которая позволяет хирургу осуществить предоперационное планирование и использовать компьютер вместо пациента. Такой подход обеспечивает возможность испытания различных хирургических способов путем их виртуального вычерчивания на коже пациента. После выбора хирургического плана, он может быть использован для перенесения на кожу пациента с использованием маркировки. Следует отметить, что показанный на ФИГ. 7 процесс также может быть выполнен частично в различных местах, т.е., в множестве различных вычислительных блоков. Также, объемная сканограмма может быть обеспечена только в форме цифровых данных.
[0096] Устройство 700 содержит вычислительный блок 701, оснащенный средством для визуализации планирования, которое содержит средство 704 для создания геометрического представления 705 поверхности пациента, и содержит средство 702 для проецирования результата планирования назад на тело пациента. Таким образом, вычислительный блок 701 может содержать соответствующий элемент 706 компьютерной программы, т.е., элемент программы планирования. В случае запланированной резекции опухоли положение опухоли и/или границы резекции опухоли могут быть заданы в интерактивном режиме или импортированы из другой рабочей станции 707. Разумеется, этим способом также могут быть обеспечены другие данные о запланированной операции. В случае необходимости может быть использован предоперационный набор 708 данных изображения, например магниторезонансная визуализация или компьютерная томография. Эскиз результата описанных выше этапов показан в виде изображения 709. Кроме того, система содержит проекционный калькулятор 710, выполненный с возможностью вычисления проекционных данных для проецирования адаптированного плана хирургической операции на участок тела пациента на основании данные 711 о поверхности. Таким образом, система 700 облегчает перенос проецируемого и адаптированного плана хирургической операции на тело пациента, причем перенос выполняют путем маркирования, например маркером.
[0097] В другом конкретном примере подобное устройство, представляющее собой сочетание оптического сканера поверхности и проектора, используется для захвата изображения поверхности пациента и проецирования результата планирования назад на поверхность пациента. Например, в качестве сканера поверхности может быть использована система Kinect компании Microsoft, которая первоначально предназначалась для игровых приложений. Кроме того, известны множество примеров использования имеющихся в продаже так называемых пикопроекторов, которые могут быть использованы для данного аспекта настоящего изобретения. Благодаря небольшому размеру они могут быть легко встроены в системы для сканирования поверхности.
[0098] Ниже более подробно описаны другой пример, а также варианты реализации, показанные на ФИГ. 5 и 6. Относительно сборки и калибровки необходимо отметить следующее. Сканер поверхности и проектор могут быть объединены в одном корпусе с неподвижным относительным положением и ориентацией. Перед применением данной системы может быть выполнена калибровочная процедура для определения оптических свойств комбинированного устройства. Данную калибровочную процедуру применяют для обеспечения геометрически точного проецирования сгенерированных компьютером изображений на реальные объекты. Калибровка может быть выполнена только один раз на фабрике. Затем, сканер захватывает изображение поверхности и передает геометрические данные, а также данные о текстуре ткани, в вычислительный блок. Ниже описан этап генерации планирования. В первичной процедуре может быть записана информация о поверхности и текстуре ткани пациента. Пользователь может использовать планировочную программу для взаимодействовать с информацией о поверхности и текстуре ткани для создания хирургического плана. В случае необходимости из базы данных, например базы данных 707 (показанной на ФИГ. 7) или 511 (показанной на ФИГ. 5) может быть извлечена другая информация, например рентгеновские маммограммы или МР-томограммы, которые могут быть использованы во время планирования. Затем, выполняют перенос хирургического плана. В частности, во второй процедуре перед хирургической операцией хирургический план переносят на тело пациента. С этой целью сканер поверхности может неоднократно сканировать поверхность пациента и передавать информацию в компьютер. Эта информация вместе с калибровочной информацией, полученной после инсталляции программы и калибровочной фазы, может быть использована в проекционной вычисляющей программе для вычисления проецирования хирургического плана на поверхность пациента. Хирургический план может быть рассмотрен хирургом на поверхности пациента и нанесен путем маркирования с использованием маркера.
[0099] На ФИГ. 8 схематично показано устройство 800 для вычисления плана хирургической операции. Устройство содержит вычислительный блок 801, отображающее устройство 802, приемный блок 803 для приема данных о поверхности пациента и данных о запланированной хирургической операции. Кроме того, на ФИГ. 8 показаны интерфейс 804 и мышь 805. Кроме того, читаемый компьютером носитель 806 реализован в форме USB-накопителя, на котором сохранен элемент 807 компьютерной программы. Этот элемент компьютерной программы предназначен для вычисления плана хирургической операции согласно настоящему изобретению. Устройство 810 является устройством для маммографии молочной железы. Кроме того, устройство содержит процессор 809, в котором также сохранен элемент 808 компьютерной программы. Устройство 800, показанное на ФИГ. 8, может быть объединено со сканером поверхности и проектором, описанными со ссылкой на ФИГ. 6 и 7, и также может быть объединено с маркером 901, выполненным с возможностью дистанционной активации, конструкция которого объяснена и описана ниже со ссылкой на ФИГ. 9.
[00100] Перед описанием устройства, показанного на ФИГ. 9, и способа его использования, необходимо отметить следующее. Согласно примеру варианта реализации настоящего изобретения в настоящей заявке представлено устройство, выполненное с возможностью измерения положения маркера и активирования маркера, когда измеренное положение маркера соответствует линии адаптированного плана хирургической операции. В случае необходимости эти функциональные средства и особенности могут быть объединены с описанными выше и ниже вариантами реализации.
[00101] На ФИГ. 9 показана система для вычисления плана хирургической операции, содержащая устройство с передатчиком и управляющим блоком, причем система также содержит маркер, выполненный с возможностью дистанционной активации, содержащий приемник. В частности, на ФИГ. 9 схематично показано устройство 900 для вычисления плана хирургической операции и для активации маркера, выполненного с возможностью дистанционной активации, для переноса вычисленного плана на кожу пациента. Устройство 902 может быть реализовано аналогично устройствам, описанным выше, например устройствам, показанным на ФИГ. 5, 6, 7 и 8. Кроме того, система содержит передатчик 903 и также управляющий блок 904. Управляющий блок 904 выполнен с возможностью управления передатчиком таким образом, что передатчик передает активирующий сигнал приемнику 906 маркера 901, выполненного с возможностью дистанционной активации,. Маркер 901 может содержать батарею 907. Кроме того, в корпусе 910 размещен втягивающий блок 905. Позиционным номером 908 обозначен сменный баллончик, и позиционным номером 909 обозначен светодиодный индикатор для измеряющей положение системы. Этот активный маркер 901 имеет механизм для включения и выключения его функции вычерчивания. Этот механизм может быть реализован с использованием механизма втягивания/выдвижения, который встроен в корпус маркера и который втягивает или выдвигает сменный баллончик, т.е. содержащую чернила часть маркера. Механизм втягивания/выдвижения может быть запущен размещенным в маркере приемным блоком, который принимает сигналы от передатчика 903 устройства 902. Сигнал может быть передан посредством инфракрасного света, радио-импульсов или других соответствующих активирующих сигналов. Батарея, расположенная в маркере, обеспечивает энергию для управления механизмом втягивания/выдвижения и приемником. Однако в этом контексте также может быть использован способ радиочастотной идентификации. Система для измерения положения (не показана) измеряет положение маркера и передает данные управляющему блоку 904. Устройство 902 сравнивает принятые данные о положении с данными положения, сохраненными в хирургическом плане, в частности, в адаптированном плане хирургической операции. Когда положение маркера достаточно приближено к одному из сохраненных положений, навигационная система передает сигнал для включения маркера. Когда маркер расположен слишком далеко, навигационная система передает сигнал для его выключения. Таким образом, маркер может вычерчивать только в положениях, которые соответствуют заданному плану хирургической операции. Устройство также может отображать положение маркера в изображении пациента для облегчения позиционирования и целеуказания активного маркера. Следует отметить, что также другие способы включения и выключения функций черчения маркера находятся в пределах объема защиты настоящего изобретения. Например, для процесса такого переключения может быть использовано давление, и также при активации маркера могут быть использованы клапаны. Кроме того, приемник может быть оборудован средством для передачи состояния маркера или режима включения и выключения к навигационной системе.
[00102] Согласно одному примеру варианта реализации настоящего изобретения представлено устройство, выполненное с возможностью измерения положения маркера, причем устройство выполнено с возможностью активирования маркера, когда измеренное положение маркера соответствует линии адаптированного плана хирургической операции.
[00103] Этот принцип и взаимодействие между данным устройством и маркером, выполненным с возможностью дистанционной активации, также показаны на ФИГ. 9 в качестве неограничивающего примера.
[00104] Кроме того, согласно другому варианту реализации настоящего изобретения маркер содержит втягивающий блок. Данный втягивающий блок может быть активирован дистанционным способом на основании текущей позиции маркера и на основании вычисленного хирургического плана.
[00105] Другие модификации описанных вариантов реализации могут быть поняты и осуществлены специалистами при практическом осуществлении настоящего изобретения после изучения сопроводительных чертежей, подробного описания настоящего изобретения и пунктов приложенной формулы. В пунктах приложенной формулы термин "содержащий" не исключает другие элементы или этапы, и неопределенный артикль английского языка "a" или "an" не исключают множественное число. Любые ссылочные позиции в пунктах приложенной формулы не должны рассматриваться как ограничение объема защиты настоящего изобретения. Сам факт, что некоторые показатели повторяются во взаимно различных зависимых пунктах, не указывает, что сочетание этих показателей не может быть использовано для усовершенствования.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО, СИСТЕМА ВИЗУАЛИЗАЦИИ И СПОСОБ КОРРЕКЦИИ МЕДИЦИНСКОГО ИЗОБРАЖЕНИЯ МОЛОЧНОЙ ЖЕЛЕЗЫ | 2017 |
|
RU2700114C1 |
| ВИРТУАЛЬНОЕ ИНТЕРАКТИВНОЕ ОПРЕДЕЛЕНИЕ ОБЪЁМНЫХ ФОРМ | 2015 |
|
RU2667976C1 |
| СПОСОБ РАЗРАБОТКИ ЛЕЧЕБНОЙ ПРОГРАММЫ ОРТОГНАТИЧЕСКОЙ ХИРУРГИИ И СООТВЕТСТВУЮЩИЕ УСТРОЙСТВА | 2005 |
|
RU2384295C2 |
| СПОСОБ И СИСТЕМА ДЛЯ БРАХИТЕРАПИИ | 2009 |
|
RU2515527C2 |
| Способ подготовки и выполнения хирургической операции с использованием дополненной реальности и комплекс оборудования для её осуществления | 2019 |
|
RU2707369C1 |
| ВЕРОЯТНОСТЬ ПОВРЕЖДЕНИЯ ЗДОРОВЫХ ТКАНЕЙ, АДАПТИРОВАННАЯ С УЧЕТОМ МАРКЕРОВ | 2010 |
|
RU2564077C2 |
| Способ подготовки и выполнения хирургической операции на голове с использованием смешанной реальности | 2020 |
|
RU2754288C1 |
| УСТРОЙСТВО ДЛЯ МОНИТОРИНГА ОДНОГО ИЛИ БОЛЕЕ ПАРАМЕТРОВ ГЛАЗА | 2012 |
|
RU2600855C2 |
| ТРЕХМЕРНАЯ РЕКОНСТРУКЦИЯ ТЕЛА И КОНТУРА ТЕЛА | 2008 |
|
RU2479038C2 |
| СИСТЕМА И СПОСОБ ИНТЕГРИРОВАННОЙ БИОПСИИ И ЛЕЧЕНИЯ | 2010 |
|
RU2558521C2 |

Группа изобретений относится к медицине, а именно к хирургии, и может быть использована для вычисления плана хирургической операции. Принимают данные о поверхности тела пациента (S1). Далее принимают данные о планируемой хирургической операции (S2), которые включают данные, представляющие целевой объект. Создают изображение поверхности участка тела пациента на основании принятых данных о поверхности тела пациента (S3). Выбирают хирургический способ из множества параметризованных хирургических способов, хранящихся в базе данных хирургических способов (S4). Адаптируют геометрические параметры плана хирургической операции на основании: 1) выбранного хирургического способа, 2) данных планируемой хирургической операции и 3) изображения поверхности. Вычисляют адаптированный план хирургической операции (S5). Показывают пользователю адаптированный план хирургической операции (S6). Переносят адаптированный план хирургической операции на поверхность тела пациента маркированием, используя маркер, выполненный с возможностью его дистанционной активации, для идентифицирования, где необходимо делать разрезы в соответствии с адаптированным планом хирургической операции. При этом активируют маркер, когда его положение на поверхности тела пациента соответствует планируемой линии разреза адаптированного плана хирургической операции. Для осуществления вышеуказанных действий используют читаемый компьютером носитель и устройство. Устройство содержит приемный блок, вычислительный блок, отображающее устройство, интерфейс, базу данных хирургических способов, управляющий блок и маркер, выполненный с возможностью его дистанционной активации. Способ обеспечивает усовершенствование дооперационного планирования хирургических операций с использованием компьютера, увеличение точности переноса адаптированного плана хирургической операции на тело пациента за счет автоматического анализа геометрических ограничений адаптированного плана хирургических операций, его виртуального проецирования и вычерчивания в форме чертежа на коже пациента при помощи дистанционной активации маркера. 3 н. и 8 з.п. ф-лы, 9 ил.
1. Способ планирования хирургической операции, включающий этапы, согласно которым:
принимают данные о поверхности тела пациента (S1),
принимают данные о планируемой хирургической операции (S2), которые включают данные, представляющие целевой объект,
создают изображение поверхности участка тела пациента на основании принятых данных о поверхности пациента (S3),
выбирают хирургический способ из множества параметризованных хирургических способов, хранящихся в базе данных хирургических способов (S4),
адаптируют геометрические параметры плана хирургической операции на основании: i) выбранного хирургического способа, ii) данных планируемой хирургической операции и iii) изображения поверхности и, таким образом, вычисляют адаптированный план хирургической операции (S5) и
показывают пользователю адаптированный план хирургической операции (S6), и
переносят адаптированный план хирургической операции на поверхность тела пациента маркированием, используя маркер, выполненный с возможностью его дистанционной активации, для идентифицирования, где необходимо делать разрезы в соответствии с адаптированным планом хирургической операции, причем маркер, выполненный с возможностью его дистанционной активации, активируют, когда его положение на поверхности тела пациента соответствует планируемой линии разреза адаптированного плана хирургической операции.
2. Способ по п. 1, дополнительно включающий этап, согласно которому извлекают множество хирургических способов из базы данных хирургических способов,
причем из базы данных хирургических способов извлекают по меньшей мере одно геометрическое ограничение хирургического способа, а
способ дополнительно содержит этап, согласно которому автоматически учитывают геометрическое ограничение хирургического способа во время адаптации геометрических параметров плана хирургической операции.
3. Способ по одному из пп. 1 или 2, согласно которому этап создания изображения поверхности участка тела пациента включает триангуляцию поверхности и наложение текстуры.
4. Способ по п. 1 или 2, согласно которому план хирургической операции показывают пользователю в форме по меньшей мере одной линии будущего разреза кожи в созданном изображении поверхности участка тела пациента.
5. Способ по п. 1 или 2, дополнительно включающий этапы, согласно которым:
принимают пользовательский ввод, выполненный с возможностью запуска изменения геометрических параметров плана хирургической операции, и
адаптируют геометрические параметры плана хирургической операции на основании принятого пользовательского ввода.
6. Способ по п. 1 или 2, дополнительно включающий этап сканирования участка тела пациента сканером поверхности и захвата фотографии участка тела пациента для обеспечения таким образом данных о поверхности тела пациента.
7. Способ по п. 1 или 2, дополнительно включающий этап, согласно которому задают в интерактивном режиме положение целевого объекта и/или границу резекции целевого объекта или импортируют из рабочей станции положение целевого объекта и/или форму целевых объектов, и/или границу резекции целевого объекта.
8. Способ по п. 1 или 2, дополнительно включающий этап визуализации хирургического плана, на котором проецируют адаптированный план хирургической операции на участок тела пациента.
9. Читаемый компьютером носитель (806), в котором сохранена компьютерная программа для планирования хирургической операции, которая при ее исполнении процессором адаптируется для выполнения этапов по любому из пп. 1-8.
10. Устройство (500) для планирования хирургической операции, содержащее:
приемный блок, выполненный с возможностью приема данных о поверхности тела пациента и данных о планируемой хирургической операции, причем данные включают данные, представляющие целевой объект;
вычислительный блок;
отображающее устройство;
интерфейс;
базу данных хирургических способов,
управляющий блок;
маркер, выполненный с возможностью его дистанционной активации,
при этом
вычислительный блок выполнен с возможностью создания изображения поверхности участка тела пациента на основании данных о поверхности,
интерфейс выполнен с возможностью приема пользовательского ввода, содержащего выбор хирургического способа из множества параметризованных хирургических способов, хранящихся в базе данных хирургических способов,
вычислительный блок выполнен с возможностью адаптации геометрических параметров плана хирургической операции на основании: i) выбранного хирургического способа, ii) данных планируемой хирургической операции и iii) изображения поверхности; причем вычислительный блок дополнительно выполнен с возможностью вычисления адаптированного плана хирургической операции в соответствии с адаптированными геометрическими параметрами,
причем отображающее устройство выполнено с возможностью показа пользователю адаптированного плана хирургической операции, а
управляющий блок выполнен с возможностью активации маркера, выполненного с возможностью его дистанционной активации, на основании адаптированного плана хирургической операции для переноса адаптированного плана хирургической операции на поверхность тела пациента, когда положение маркера, выполненного с возможностью его дистанционной активации, на поверхности тела пациента соответствует планируемой линии разреза адаптированного плана хирургической операции.
11. Устройство по п. 10, дополнительно содержащее:
сканер поверхности;
проекционное устройство; причем
сканер поверхности выполнен с возможностью сканирования поверхности участка тела пациента и таким образом генерирования информации о поверхности, а
проекционное устройство выполнено с возможностью проецирования адаптированного плана хирургической операции на участок тела пациента.
| US 2006020279 А1, 26.01.2006 | |||
| СПОСОБ ИДЕНТИФИКАЦИИ ЭЛЕМЕНТА НА ДВУХ И БОЛЕЕ ИЗОБРАЖЕНИЯХ | 2007 |
|
RU2444061C2 |
| WO 2011153639 A2, 15.12.2011 | |||
| US 2011160578 A1, 30.06.2011 | |||
| US 5715836 A, 10.02.1998 | |||
| US 2012130490 A1, 24.05.2012 | |||
| US 5871018 A, 16.02.1999 | |||
| US 2007208234 A1, 06.09.2007 | |||
| US 2013072784 A1, 21.03.2013. | |||

