ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Данная заявка притязает на преимущество предварительной заявки США № 62/013380, поданной 17 июня 2014 г., которая включается в этот документ посредством ссылки. Данная заявка также находится в процессе одновременного рассмотрения с заявкой США № 14/077467, поданной 12 ноября 2013 г. и озаглавленной "Marine Threat Monitoring and Defense System", которая полностью включается в этот документ посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
[0002] За последние несколько лет значительно увеличились операции по добыче нефти и газа в новых областях, например в Арктике. Эта увеличивающаяся активность повышает вероятность того, что в этих областях будут использоваться стационарные или плавучие эксплуатационные платформы, буровые суда и другие сооружения. Проблемой для этих типов сооружений в таких областях является возможность повреждения, вызванного объектами, которые не управляются и плавают или погружены в воду, например плавающие обломки, сброшенный груз, мусор, айсберги, плавучие льдины и другие угрозы ("морские препятствия"). В покрытых льдом областях, например, большие айсберги и мощные плавучие льдины могут проходить через области разведки, добычи и бурения. Хотя добывающие суда могут быть спроектированы, чтобы справляться с некоторыми ударами от таких морских препятствий, суда могут иметь ограничения в том, сколько они могут выдерживать удары и какова сила возможных ударов, с которой они могут справляться без риска.
[0003] По этим причинам операторам на добывающем судне или другом сооружении потребуется предвидеть и защищаться от угроз от препятствий, чтобы добывающее судно можно было защитить в достаточной мере. Если условия становятся слишком опасными, то операторам также может понадобиться приостанавливать операции и уводить добывающее судно до тех пор, пока не станет безопасным вернуться к нормальным операциям. Возможность надежно выполнять это может быть крайне важна для операторов.
[0004] Для контроля условий в покрытой льдом области операторы могут использовать модели дрейфа айсбергов. Инженерами и учеными, занимающимися изучением льда, разработано несколько моделей дрейфа айсбергов. Обычно существующие модели характерны для конкретной области океана. Как правило, модели дрейфа айсбергов прогоняются на берегу в центрах обработки данных, и результаты отправляются на судно ежедневно или при необходимости. Очевидно, что это требует надежной связи, чтобы данные и предсказания можно было отправлять туда и обратно.
[0005] Например, различные модели предсказания дрейфа льда доступны от C-Core, Национального научно-исследовательского совета Канады (NRC) и других. Наблюдения айсбергов получаются с использованием авиационной разведки, получения изображений через спутники, радиолокационного или визуального наблюдения, и полученные в море наблюдения отправляются в береговой центр обработки. Затем модель предсказания дрейфа прогоняется на берегу в центре обработки. Поскольку наблюдения в море от судов и т. п. отправляются обратно в центр обработки на берегу, модель дрейфа нельзя прогнать, если связь отсутствует. В любом случае модель предсказания дрейфа часто прогоняют только один раз в день в береговом центре, а затем результат (изображение предсказанного дрейфа для всех отслеживаемых айсбергов) отправляется на суда для рассмотрения. Как и в предыдущем случае, если связь отсутствует, то отправка анализа может быть задержана.
[0006] Предмет настоящего раскрытия изобретения направлен на преодоление одной или нескольких изложенных выше проблем или, по меньшей мере, уменьшение их воздействий.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Анализируются модели дрейфа и буксирования для защиты целевого морского сооружения и его заданной работы от угроз, нарушений, повреждения и т. п. Система моделирования позволяет пользователям обновлять наблюдения, сравнивать модели и отображать различные показатели качества как для предсказания курса льда, так и для оценки качества моделей.
[0008] Хотя настоящее раскрытие изобретения рассматривает анализ дрейфа и буксировки по отношению ко льду, например айсбергам, плавучим льдинам и т. п., необходимо принять во внимание, что идеи настоящего раскрытия изобретения могут применяться к мусору или чему-либо еще на/возле поверхности воды, что может представлять угрозу целевому морскому сооружению. Более того, хотя настоящее раскрытие изобретения сосредоточено на модели дрейфа и буксировки льда, другие типы моделей могут использоваться аналогичным образом.
[0009] Система моделирования содержит "каркас" модели предсказания, который позволяет пользователям системы "подключать" и использовать различные модели. Модели включают в себя модели дрейфа для вычисления будущих или последующих положений дрейфа некоего препятствия в окрестности целевого морского сооружения. Например, на основе полученных данных о текущих условиях в море система предсказывает дрейф льда для каждого препятствия с использованием каждой модели, которая вычисляет пассивный дрейф препятствий из текущих или заданных положений при преобладающих условиях. Эта обработка предпочтительно выполняется в море в полевых условиях с использованием инструмента планирования из раскрытой системы. Когда в систему вводятся новые данные, или после некоторого промежутка времени (например, текущие предсказания могут иметь дробность в 1 час), система помещает все текущие наблюдения айсбергов во все модели дрейфа.
[0010] Дополнительно или в качестве альтернативы вычислению дрейфа модели могут включать в себя модели буксировки для вычисления будущих или последующих положений буксировки некоего препятствия в окрестности целевого морского сооружения. Например, на основе полученных данных о текущих условиях в море система может предсказать будущие или последующие положения буксировки для каждого препятствия с использованием каждой модели, которая вычисляет активное отклонение препятствий от текущих или заданных положений при преобладающих условиях. Эта обработка предпочтительно выполняется в море в полевых условиях с использованием инструмента планирования из раскрытой системы.
[0011] Затем предсказанные результаты каждой модели можно показать на картах интерактивной системы, например, в виде разных слоев. Качество (или ошибка) со временем (в сравнении с фактическими наблюдениями и дрейфом) у каждой модели отображается, наносится на график, отслеживается и сообщается. Тогда на основе качества модели пользователь системы может решить, какая модель выдала наилучшие предсказания, и может отметить эту модель как оптимальную модель. Затем оптимальную модель можно использовать для окончательных предсказаний, контроля тревожных зон, планирования операций буксирования айсбергов и других целей.
[0012] Система автоматизирует задачи в полевых условиях путем сведения моделей в рамках автоматизированной системы управления и контроля. В одном преимуществе система помогает при выборе самого эффективного способа уклонения от айсберга (или автоматически выбирает его) для целевого морского сооружения путем выбора способа и хронометража отклонения касательно внешних условий, что может сэкономить топливо и сделать операции управления ледовой обстановкой более эффективными.
[0013] В одном варианте осуществления способ моделирования морских угроз используется для целевого морского сооружения, проводящего заданную работу в водном пространстве. Способ включает в себя контроль по меньшей мере одного заданного положения по меньшей мере одного препятствия, дрейфующего в окрестности целевого морского сооружения, с помощью компьютерной системы, когда целевое морское сооружение проводит заданную работу в водном пространстве. Способ включает в себя моделирование с помощью компьютерной системы по меньшей мере двух последующих положений по меньшей мере одного препятствия с течением времени по меньшей мере из одного заданного положения относительно целевого морского сооружения с использованием по меньшей мере двух моделей для вычисления перемещения по меньшей мере одного препятствия. Способ дополнительно включает в себя показ с помощью компьютерной системы по меньшей мере двух последующих положений по меньшей мере из двух моделей для сравнения друг с другом.
[0014] Например, способ моделирования морских угроз может моделировать по меньшей мере два последующих положения дрейфа по меньшей мере одного препятствия с течением времени относительно целевого морского сооружения с использованием по меньшей мере двух моделей дрейфа для вычисления пассивного дрейфа по меньшей мере одного препятствия, примененных по меньшей мере к одному заданному положению. Дополнительно или в качестве альтернативы способ моделирования морских угроз может моделировать по меньшей мере два последующих положения буксировки по меньшей мере одного препятствия с течением времени относительно целевого морского сооружения с использованием по меньшей мере двух моделей буксировки для вычисления активного отклонения по меньшей мере одного препятствия, примененных по меньшей мере к одному заданному положению.
[0015] В другом варианте осуществления программируемое запоминающее устройство содержит сохраненные на нем программные команды для побуждения программируемого управляющего устройства выполнить способ контроля морских угроз, который отмечен выше и раскрывается в этом документе.
[0016] В еще одном варианте осуществления система моделирования морских угроз используется для целевого морского сооружения, проводящего заданную работу в водном пространстве. Система может содержать оборудование связи, получающее информацию об одном или нескольких препятствиях в окрестности целевого морского сооружения. Система может содержать запоминающее устройство, хранящее полученную информацию и хранящее по меньшей мере две модели для вычисления перемещения. Технологическое оборудование системы может быть функционально соединено с оборудованием связи и запоминающим устройством.
[0017] Технологическое оборудование может конфигурироваться для контроля по меньшей мере одного заданного положения по меньшей мере одного из препятствий, дрейфующих в окрестности целевого морского сооружения, когда целевое морское сооружение проводит заданную работу в водном пространстве. Технологическое оборудование также может конфигурироваться для моделирования по меньшей мере двух последующих положений по меньшей мере одного препятствия с течением времени относительно целевого морского сооружения с использованием по меньшей мере двух моделей, примененных по меньшей мере к одному заданному положению. Технологическое оборудование может дополнительно конфигурироваться для показа по меньшей мере двух последующих положений для сравнения друг с другом.
[0018] Вышеприведенная сущность изобретения не предназначена для обобщения каждого возможного варианта осуществления или каждого аспекта настоящего раскрытия изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
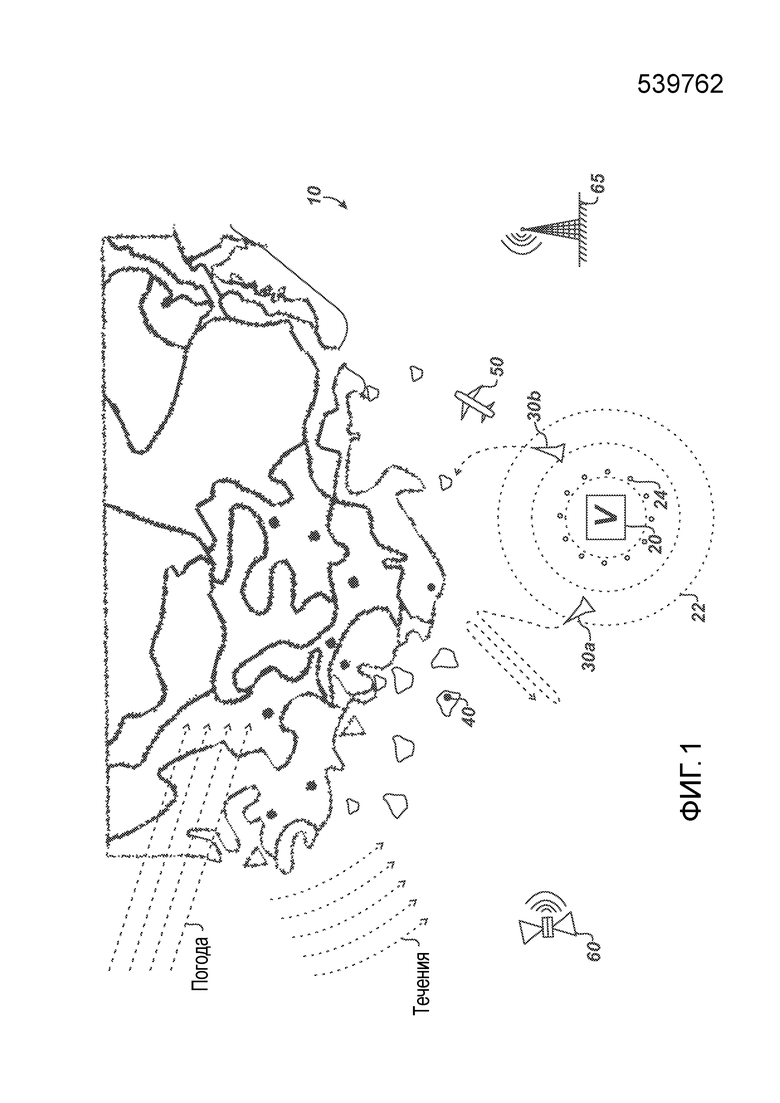
[0019] Фиг. 1 схематически показывает систему моделирования морских угроз в соответствии с настоящим раскрытием изобретения.
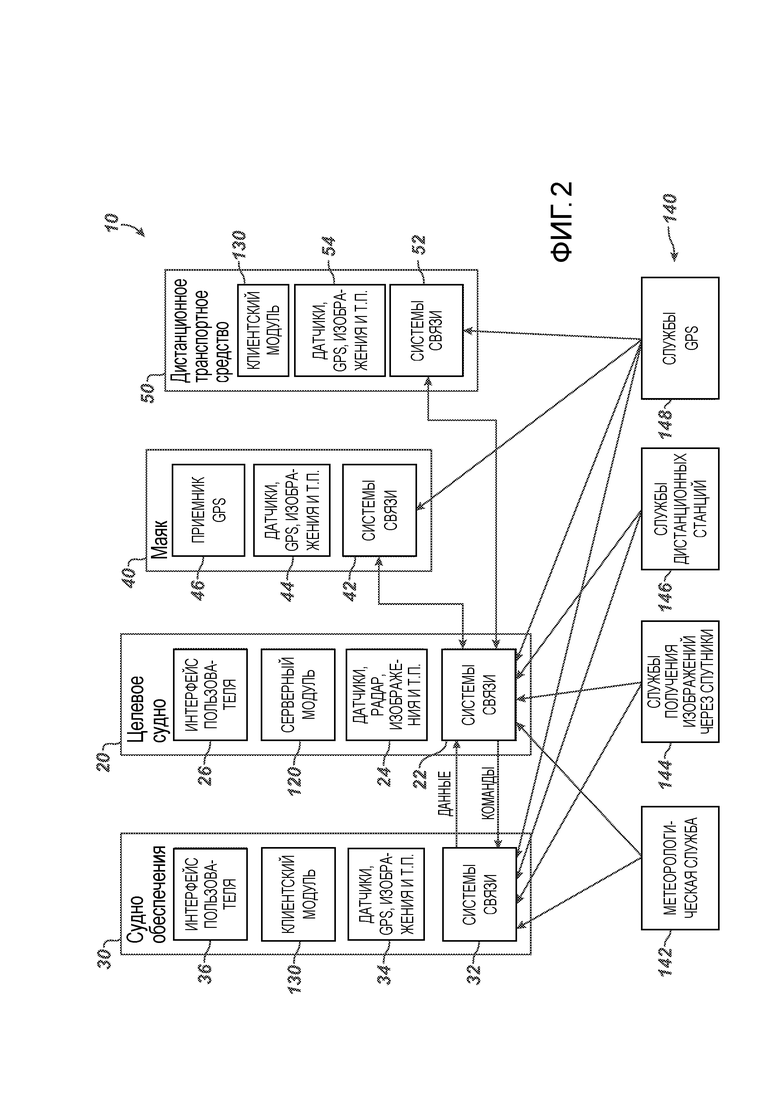
[0020] Фиг. 2 схематически показывает некоторые компоненты системы моделирования, включающие в себя целевое морское сооружение, судно обеспечения, маяк и дистанционное транспортное средство, вместе с различными службами, используемыми системой.
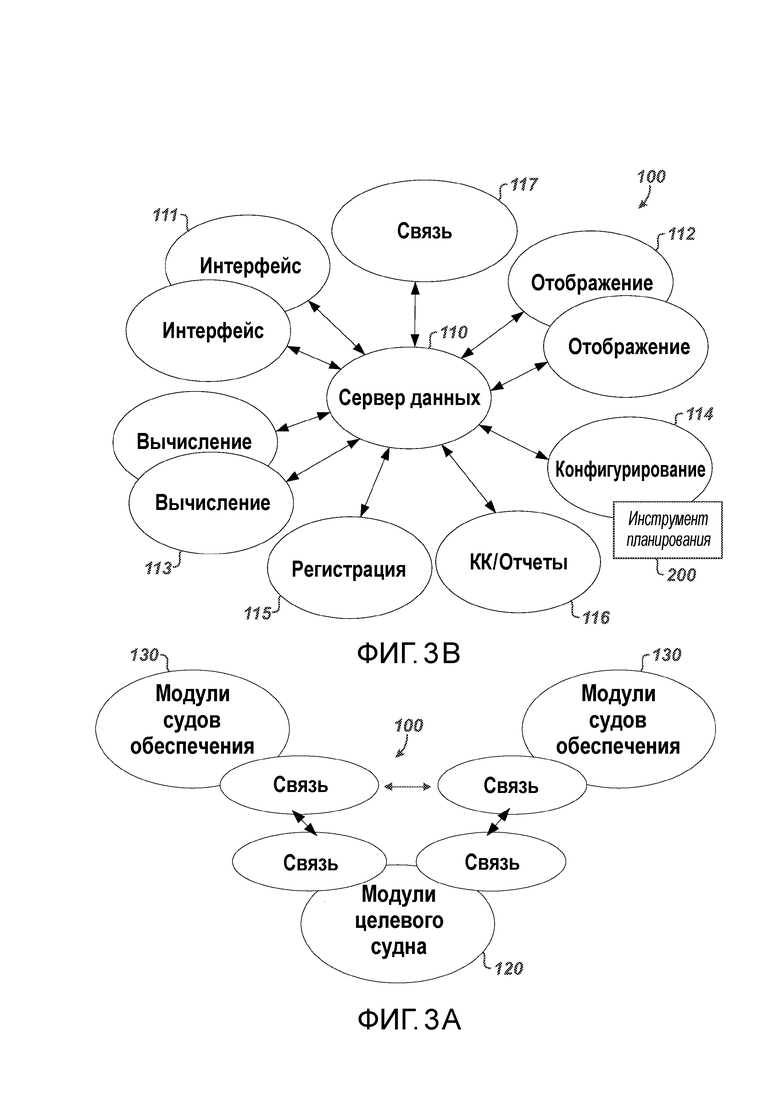
[0021] Фиг. 3A-3B показывают особенности клиент-серверной архитектуры для системы моделирования.
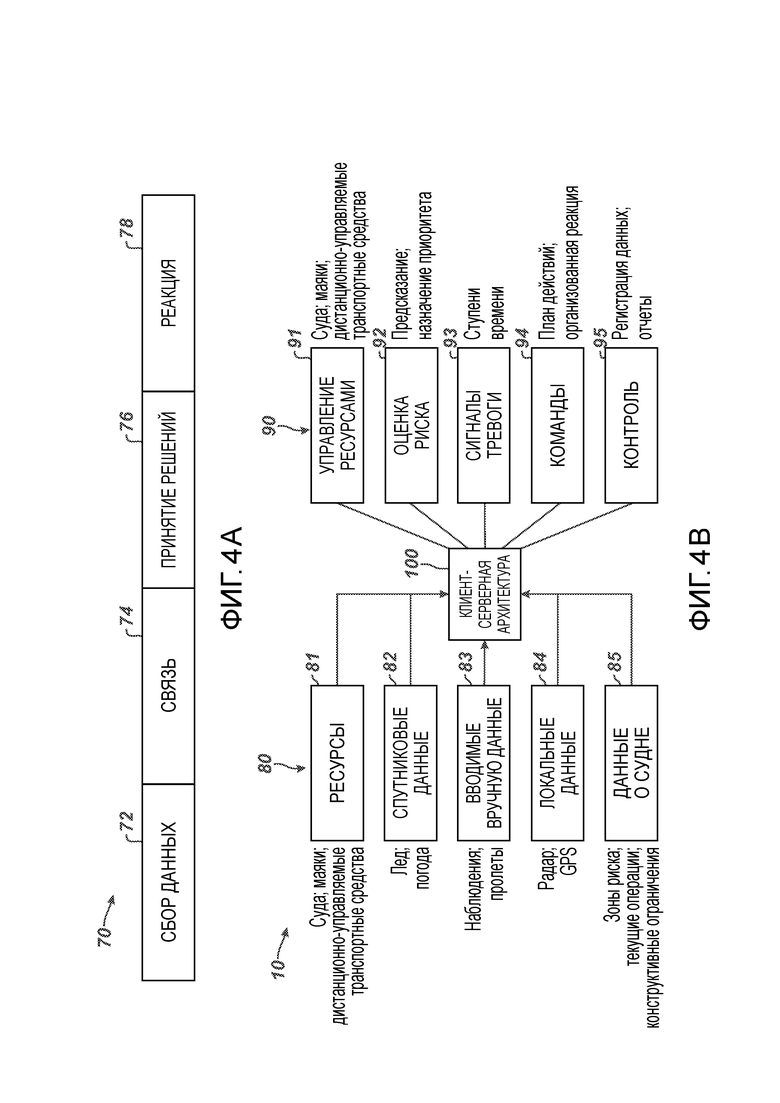
[0022] Фиг. 4A-4B схематически показывают методологию общей обработки и манипулирования данными для системы моделирования.
[0023] Фиг. 5 концептуально показывает компоненты системы моделирования в примерной компоновке в течение операций.
[0024] Фиг. 6A-6B показывают процесс в виде блок-схемы алгоритма, на которой система моделирования моделирует дрейф препятствия относительно целевого морского сооружения.
[0025] Фиг. 7A-7D показывают примерные экраны интерфейса пользователя для раскрытой системы моделирования, отображающей модели дрейфа для препятствия.
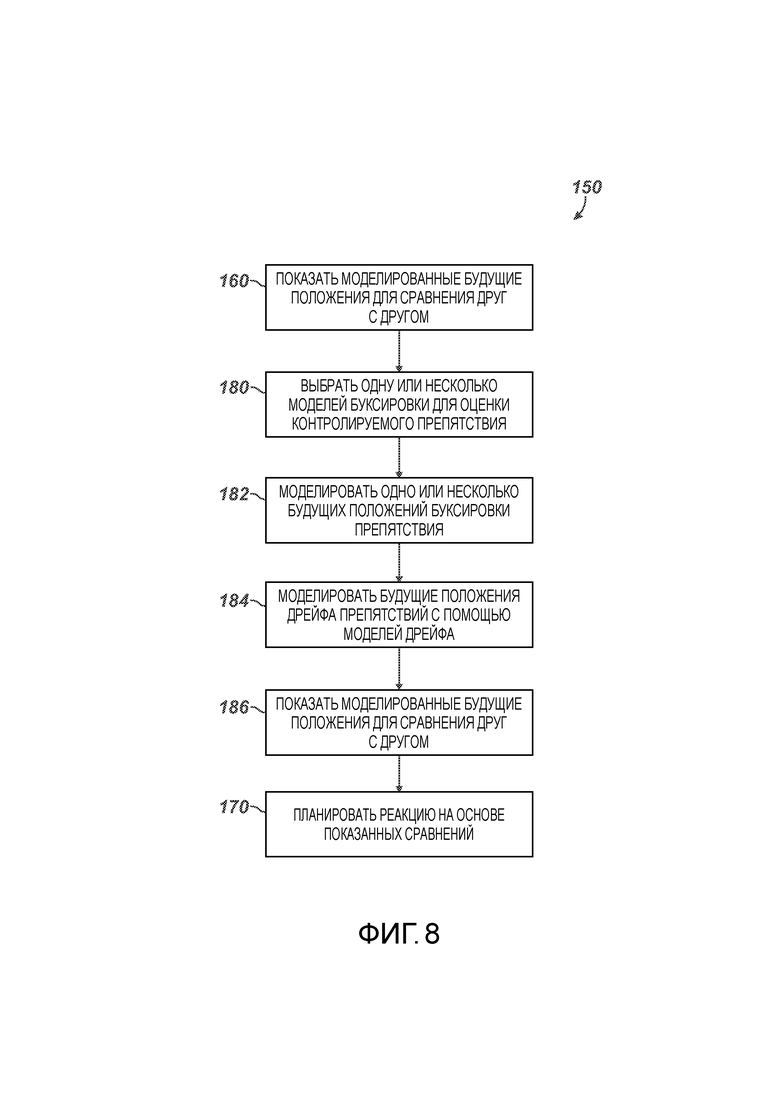
[0026] Фиг. 8 показывает процесс в виде блок-схемы алгоритма, на которой система моделирования моделирует буксировку препятствия относительно целевого морского сооружения.
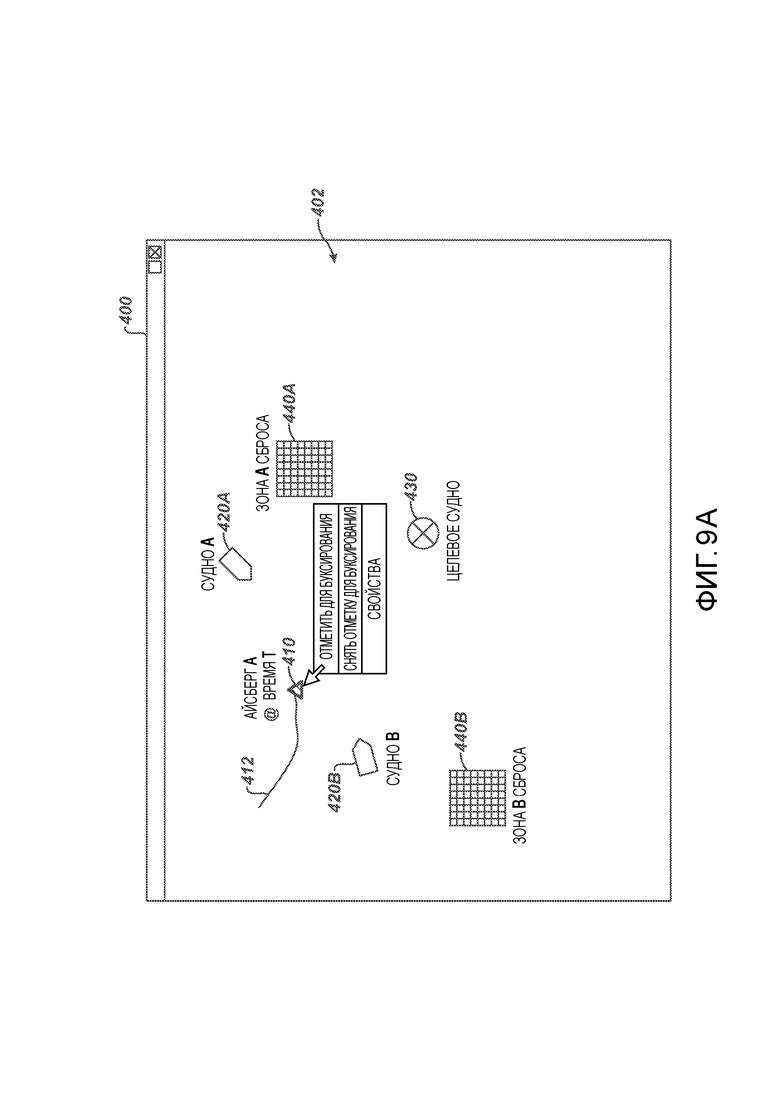
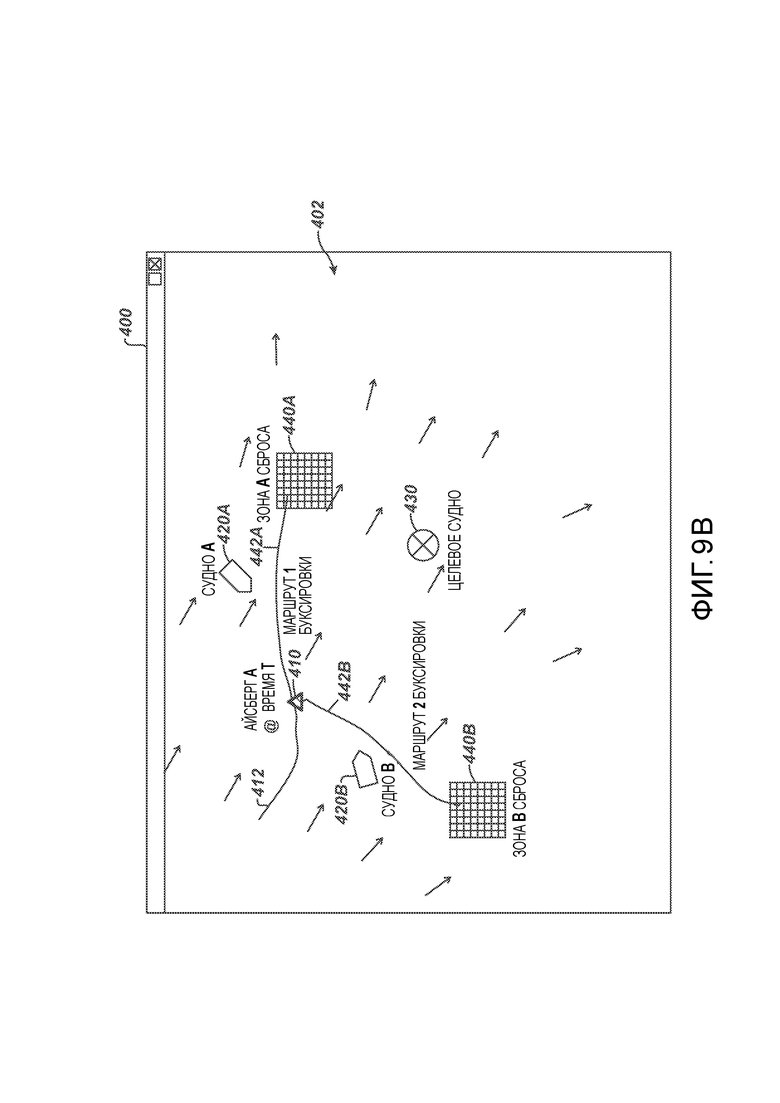
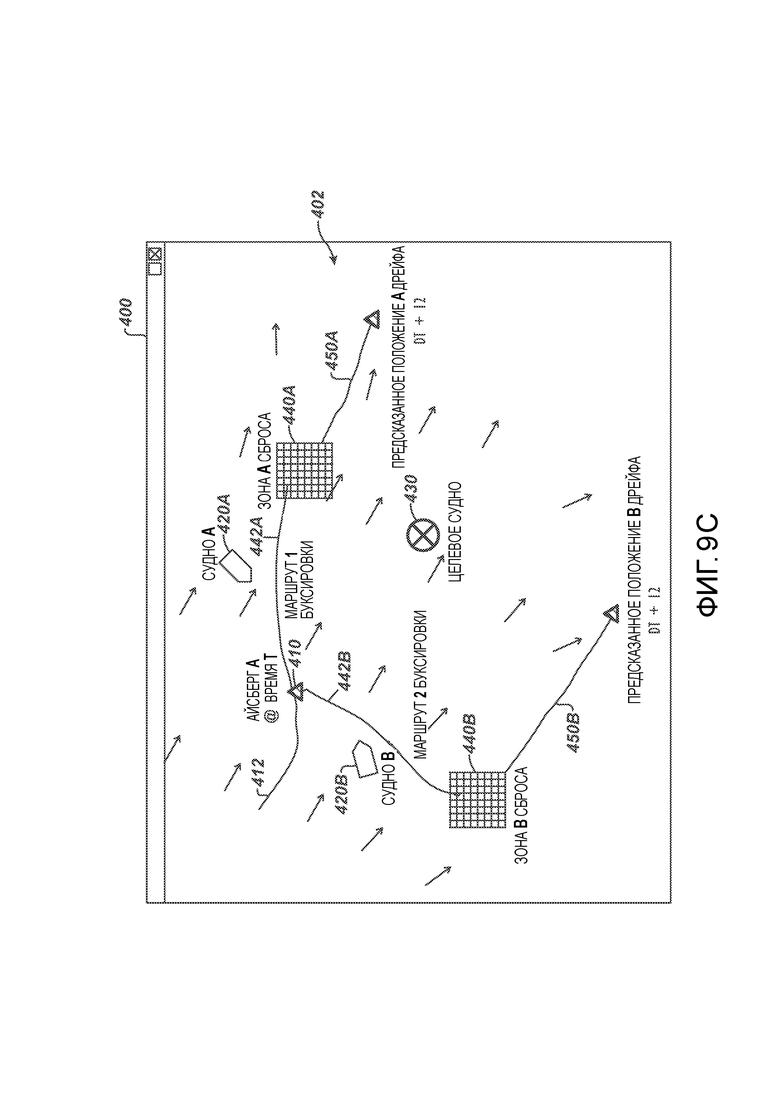
[0027] Фиг. 9A-9C показывают примерные экраны интерфейса пользователя для раскрытой системы моделирования, отображающей модели буксировки для препятствия.
[0028] Фиг. 10A-10B показывают дополнительные экраны интерфейса пользователя для раскрытой системы моделирования, отображающей модели буксировки и дрейфа для препятствия.
[0029] Фиг. 11 показывает альтернативный экран интерфейса пользователя, изображающий информацию о зоне сброса для препятствия относительно целевого морского сооружения.
ПОДРОБНОЕ ОПИСАНИЕ
1) Обзор системы моделирования
[0030] Как отмечалось ранее, защита от морских препятствий и ударов закрепленных, стационарных или неподвижных морских сооружений либо морских судов с плановыми перемещениями или маршрутами представляет собой значительную проблему для операций бурения, добычи и разведки в некоторых морских областях, например в Арктике. Чтобы справиться с этой проблемой, операторы на таком сооружении могут использовать систему 10 моделирования морских угроз, которая схематически проиллюстрирована на фиг. 1. Система 10 моделирования защищает целевое морское сооружение 20 в некой области, например в Арктике, имеющей плавучие и/или погруженные объекты, которые дрейфуют в океане и угрожают сооружению 20. Система 10 моделирования может объединяться, быть частью или использоваться вместе с системой контроля и защиты от морских угроз, которая раскрыта в заявке США № 14/077467, находящейся в процессе одновременного рассмотрения, которая полностью включается в этот документ посредством ссылки.
[0031] Вообще, целевое морское сооружение 20 может быть добывающим судном, эксплуатационной платформой, буровым судном, устьевым оборудованием, трубопроводом, сейсморазведочным судном или другим морским сооружением либо судном, используемым в операциях бурения, добычи или разведки в море. Сооружение 20 может быть плавучим или стационарным и может быть постоянно или временно прикреплено к морскому дну. Поэтому сооружение 20 может размещаться (то есть "назначаться") для бурения, загрузки танкера, ремонта скважины, подводных работ либо других операций бурения или добычи в водном пространстве. Для разведки сооружение 20, например сейсморазведочное судно, может перемещаться по области разведки с плановым (то есть "заданным") маршрутом для сейсмического исследования или другой такой разведочной операции. В любом случае сооружение 20 обычно работает в одном определенном местоположении в течение некоторого периода времени для выполнения операций бурения, добычи или разведки, что делает его уязвимым к движущимся угрозам от морских препятствий в воде. С целью описания сооружение 20 в этом документе называется целевым судном, но сооружение 20 может быть любым из нескольких типов сооружений, судов, платформ и т. п., которые известны и используются для бурения, добычи и разведки на водных путях.
[0032] Как обсуждается в нижеприведенных примерах, такое целевое судно 20 может использоваться в покрытых льдом областях, имеющих глетчерный лед, паковый лед, плавучие льдины, айсберги и другие ледовые препятствия. Однако судно 20 и элементы раскрытой системы 10 могут использоваться в других местоположениях, содержащих мусор, растения, плавающие обломки, сброшенный груз или другие помехи либо препятствия, погруженные и/или плавающие в воде, которые могут мешать операциям бурения, добычи или разведки судна 20. Раскрытая система 10, которая описана в нижеприведенных примерах, может использоваться аналогичным образом для контроля и защиты целевого судна 20 в любой из этих ситуаций, как обсуждается ниже.
[0033] Например, при использовании в покрытой льдом области целевое судно 20 подвержено угрозам от дрейфующих морских препятствий, а именно плавающих обломков, сброшенного груза, мусора, айсбергов, плавучих льдин, разреженного пакового льда и других опасностей, которые могут ударить судно 20 и вызвать структурное повреждение сверх ограничений судна или нарушить заданные операции. Морские препятствия могут свободно перемещаться в области возле целевого судна 20, и метеорологические условия, океанические течения, высота волны, направление и скорость ветра и другие факторы окружающей среды могут влиять на перемещения (дрейф) этих препятствий. Более того, покрытые льдом области могут содержать паковый лед с различной толщиной и слоями. Части этого пакового льда могут со временем отрываться и плавать в океанических течениях, угрожая судну 20. Поэтому возможность контролировать и отслеживать лед может быть полезна для защиты целевого судна 20 в такой области.
[0034] Чтобы помочь операторам повысить безопасность и улучшить операции (например, бурение, добычу или разведку), система 10 моделирования контролирует, прогнозирует и превентивно предохраняет от различных угроз в покрытой льдом области. Для достижения этих целей система 10 содержит различные суда 30 обеспечения, маяки 40 слежения, разведывательные транспортные средства 50 и оборудование связи (конкретно не указано) среди прочих особенностей, которые будут подробнее обсуждаться позже.
[0035] В системе 10 оборудование на целевом судне 20 (или на любом другом судне 30 или в другом местоположении) может действовать в качестве централизованного управления, и оно осуществляет связь напрямую с каждым из судов 30 обеспечения и других компонентов системы 10. В свою очередь различные суда 30 обеспечения и другие компоненты, которые нужно установить, управлять и отслеживать с помощью системы 10, исполняют средства программного обеспечения для выполнения задач и получения данных для защиты целевого судна 20. В конечном счете суда 20/30 и другие компоненты передают данные и команды между собой для превентивного действия против угроз от морских препятствий.
[0036] Вкратце, операторы системы управляют системой 10 для защиты целевого судна 20 от приближающихся ледовых угроз. Когда проходят заданные операции (бурение, добыча или разведка), и возникают угрозы, система 10 помогает управлять операциями судов 30 обеспечения, в задачу которых входит защита целевого судна 20, и помогает отслеживать и контролировать лед, когда он дрейфует относительно целевого судна 20. Как часть этого управления система 10 получает и использует информацию об образованиях и местоположениях льда от различных спутников 60, например метеорологических спутников, спутников отображения и спутников GPS. Более того, система 10 может получать изображения и другую информацию с использованием дистанционных транспортных средств 50, например беспилотной авиации или т. п., для фотосъемки или получения метеорологической информации. Кроме того, система 10 может получать информацию от удаленных базовых станций 65 на суше, например метеорологических станций и т. п.
[0037] Затем система 10 моделирования использует программное обеспечение, системы связи, спутниковое и метеорологическое формирование изображений и т. п., чтобы операторы системы могли визуализировать и управлять различными препятствиями возле целевого судна 20 и могли назначать и направлять различные суда 30 обеспечения и другие компоненты, чтобы отслеживать и бороться с теми препятствиями. Для содействия в визуализации и управлении система 10 в реальном масштабе времени контролирует океанические течения, высоту волны, метеорологические условия (температуру, направление и скорость ветра и т. п.), мусор и лед в окрестности целевого судна 20, и эта информация используется для прогноза перемещений (то есть дрейфа) льда и изменений в окружающей среде.
[0038] Затем в ходе операций система 10 отслеживает риски от мусора и ледовых угроз и прогнозирует, как те риски могли бы развиваться в будущем. Прогнозирование может основываться на информации о том, например, как обычно действуют местные океанические течения, как такие течения действуют теперь, где в настоящее время расположены айсберги или льдины, какова уверенность в прогнозе и т. п. Более того, если целевое судно 20 используется для операций разведки, например сейсморазведки, то у целевого судна 20 есть плановый маршрут или курс для хода. В этом случае прогнозирование может дополнительно основываться на текущей скорости, направлении, маршруте, плановом курсе и т. п. у целевого судна.
[0039] Прогнозирование, которое раскрывается в этом документе, анализирует дрейф препятствий с использованием моделей дрейфа и дополнительно может использовать модели буксировки для буксирования препятствий. Тогда анализ на модели дрейфа и буксировки может использоваться для некоторого количества целей. Например, анализ может использоваться в полевых условиях пользователями системы для отыскания и использования наиболее эффективных моделей дрейфа и буксировки для борьбы с препятствиями. Как только сконфигурирована система 10, прогон каждой модели можно автоматизировать и показать пользователю системы, позволяя пользователю сконцентрироваться на имеющейся задаче. Анализ также может использоваться на берегу в качестве обзора по окончании сезона для определения, какая модель показала лучшие результаты в ходе предыдущего сезона (сезонов). Тогда разработчики моделей могут уточнять модели дрейфа и буксировки, чтобы проверять и калибровать новые либо измененные модели для использования в будущем.
[0040] На основе отслеживаемых рисков, прогнозов и моделей система 10 может идентифицировать и автоматически предлагать различные сценарии для улучшения защиты целевого судна 20 путем указания, можно ли переместить или разбить препятствия в подходящем периоде времени, путем указания, когда отсоединить и переместить целевое судно 20 от прогнозируемой угрозы, и т. п.
[0041] Посредством этого контроля, отслеживания, прогнозирования и моделирования система 10 получает и показывает операторам системы различные данные для анализа. Данные от непосредственных наблюдений, датчиков и маяков 40 могут сообщать информацию о местоположении в реальном масштабе времени судов 30 обеспечения, айсбергов, плавучих льдин, океанические течения, скорость и направление ветра и другие исследуемые переменные. Датчики и маяки 40 могут размещаться вручную или воздушным транспортом, сбрасываться с судна 30 обеспечения, вертолета, дистанционно-управляемого летательного аппарата и т. п. Используемые датчики могут включать в себя ледовые профилометры, например, гидролокаторы верхнего обзора, для обнаружения наличия, толщины, движения и других свойств морского льда. Примеры таких устройств включают в себя ледовый профилометр-гидролокатор и акустический доплеровский профилометр течений, которые размещаются в воде на 25-60 метрах под поверхностью. Дополнительные данные для анализа включают в себя, но не ограничиваются, изображения льда со спутников, векторные файлы Исследовательского института геоинформационных систем (ESRI), вручную заданные препятствия с назначенными курсами и уровнем угрозы, модели предсказания морских течений/потоков льда, данные регистрируемых океанических течений, положения судов и запретные зоны, показания радара для типовых кораблей и льда и алгоритмы автоматической идентификации. При предсказании перемещений льда в воде система может использовать ледовые профилометры, смонтированные на морском дне, которые могут измерять толщину льда (осадку), размер льдин и другие измерения.
[0042] Объединяя всю эту информацию, операторы системы могут использовать систему 10 для направления судов 30 обеспечения на выполнение выбранных задач, например прохождение защитных маршрутов с дроблением морских препятствий, физическое отведение морских препятствий, визуальное наблюдение морских препятствий, размещение маяков 40 дистанционного контроля и т. п. В конечном счете система 10 стремится идентифицировать риски как можно раньше, прогнозировать, куда те риски будут перемещаться (дрейфовать) с течением времени, и выявлять защитные меры для борьбы с угрозами, чтобы целевое судно 20 могло продолжать заданные операции. Помимо этого система 10 также может идентифицировать уровень угрозы и то, какой период времени может понадобиться для прекращения заданных операций и, возможно, перемещения или эвакуации судна 20.
[0043] Как подробнее обсуждается ниже, операторы системы используют инструмент планирования в системе 10 для превентивного контроля окружающей среды, оценки рисков, моделирования дрейфа и буксировки препятствий и принятия необходимых решений, например, приказание судам 30 обеспечения перехватить морские препятствия, которые создают риск, и приказание судам 30 обеспечения выполнять обязанности поиска и преодоления льда по предопределенному курсу (например, "частокол", "кольцо", эллиптические, орбитальные и другие шаблоны). Как показано на фиг. 1, судну 30a обеспечения поставлена задача, например, выполнять шаблон "частокол" для пресечения угроз от льда путем разбивания льда и быть готовым к перемещению (то есть буксировке) препятствий при необходимости. Оператор также может приказать судам 30 обеспечения наблюдать и отмечать идентифицированные морские препятствия, которые создают риск. Например, другому судну 30b обеспечения на фиг. 1 поставлена задача наблюдать и отмечать конкретный айсберг. Разведка также может осуществляться дистанционными транспортными средствами 50, например летательными аппаратами, которые могут сбрасывать маяки 40, делать фотографии ледовых образований, проводить метеорологические измерения и выполнять другие обязанности возле целевого судна 20. Ниже обсуждаются эти и другие подробности системы 10.
2) Компоненты системы моделирования
[0044] Исходя из системы 10 моделирования в целом, обсуждение теперь обращается к дополнительным подробностям компонентов системы. Фиг. 2 схематически показывает некоторые компоненты системы 10 моделирования, включающие в себя целевое морское сооружение 20, судно 30 обеспечения, маяк 40 и дистанционное транспортное средство 50. Также изображаются различные службы 140, используемые системой 10 моделирования.
[0045] Как станет понятно, другие связанные компоненты также могут использоваться и могут основываться на некоторых идеях, подробно рассмотренных ниже. Кроме того, данная реализация может содержать больше или меньше этих компонентов. Дополнительные подробности, связанные с системой 10 моделирования, которая показана на фиг. 2, раскрываются во включенной заявке США № 14/077467 и для краткости здесь не повторяются.
3) Клиент-серверная архитектура
[0046] Исходя из системы 10 моделирования в целом и ее компонентов, обсуждение теперь обращается к дополнительным подробностям компьютерной архитектуры системы. Как упоминалось ранее, система 10 использует клиент-серверную архитектуру. Серверные модули 120 можно использовать на целевом судне 20, а клиентские модули 130 можно использовать на судах 30 обеспечения и других компонентах. В качестве альтернативы серверные модули 120 можно использовать на судах 30 обеспечения, а клиентские модули 130 можно использовать на целевом судне 20 и других компонентах. Являясь клиент-серверной, раскрытая система 10 может использоваться на одной рабочей станции на одном судне или может использоваться на нескольких серверах на нескольких судах.
[0047] Для пояснительных целей фиг. 3A схематически показывает клиент-серверную архитектуру 100 системы в виде блок-схемы, а фиг. 3B схематически показывает различные процессы клиент-серверной архитектуры 100, которые можно распределять и совместно использовать между системой 10 моделирования и ее модулями 120 и 130. Дополнительные подробности, связанные с клиент-серверной архитектурой 100 из фиг. 3A-3B, раскрываются во включенной заявке США № 14/077467 и для краткости здесь не повторяются.
[0048] Отдельно отметим процессы 113 вычислений и процессы 115 конфигурирования. Процессы 113 вычислений вычисляют положения судов, осуществляют обнаружение столкновений, предсказывают пути судов и препятствий, прогоняют вычисления моделей дрейфа и буксировки и выполняют другие вычисления. Предсказание путей препятствий с использованием моделей дрейфа и буксировки, которое раскрывается в этом документе, может помочь операторам и системе 10 в оценке угроз и рисков и реализации задач для борьбы с ними. Также путем выполнения обнаружения столкновений между судами 20/30 и ледовыми препятствиями процессы 113 вычислений могут формировать сигналы тревоги, если предсказываются возможные столкновения.
[0049] Процессы 114 конфигурирования позволяют операторам конфигурировать работу системы, например, задавать интерфейсы данных, дисплеи, рабочие станции, суда обеспечения, местоположения регистрации, параметры связи и любые критерии исключения для сигналов тревоги. В дополнение к работе вместе с целевым судном 20 каждое судно 30 обеспечения может снабжаться компонентами системы, которые могут работать независимо от целевого судна 20. В частности, процессы 114 конфигурирования содержат инструмент 200 планирования. Как обсуждается ниже, инструмент 200 планирования является графическим приложением, которое позволяет операторам системы видеть операции и задавать план защиты для целевого судна 20. Инструмент 200 планирования открыт для взаимодействия с несколькими моделями дрейфа для потока/дрейфа льда и с несколькими моделями буксировки. Моделирование предпочтительно выполняется в полевых условиях для предоставления оперативных результатов операторам системы и экспертам в области льда на одном или нескольких судах 20/30.
4) Методология обработки
[0050] Компоненты раскрытой системы 10 моделирования, использующие клиент-серверную архитектуру 100, которая изложена ранее, придерживаются методологии общей обработки, которая схематически проиллюстрирована на фиг. 4A. Как показано, методология 70 обработки системы включает в себя сбор данных (блок 72), связь (блок 74), принятие решений (блок 76) и реакцию на угрозу (блок 78).
[0051] Прежде всего, как показано на фиг. 4B, клиент-серверная архитектура 100 содержит различные ресурсы и источники 80 данных, которые участвуют в сборе данных (блок 72) по методологии 70 обработки системы из фиг. 4A. Как отмечалось ранее, некоторые ресурсы 81 включают в себя суда, маяки, дистанционные транспортные средства и другие компоненты для сбора данных для клиент-серверной архитектуры 100. Спутниковые данные 82 могут поступать от метеорологических спутников, получающих изображения льда спутников и спутников GPS, а вводимые вручную данные 83 могут поступать от визуальных наблюдений, пролетов и т. п. Клиент-серверная архитектура 100 также может получать локальные данные 84 на целевом судне (20; фиг. 1), от радара, GPS и т. п.
[0052] В конечном счете целевое морское сооружение или судно (20) содержит собственные электрические, аварийные и операционные системы, и эти данные 85 о целевом судне могут использоваться клиент-серверной архитектурой 100. Кроме того, любые текущие операции, выполняемые на судне (20), и конструктивные ограничения судна могут быть частью данных 85 о судне, доступных клиент-серверной архитектуре 100. Например, целевое судно (20) может быть способно справляться с различными уровнями ветра, течения и льда в течение некоторого периода времени, но может иметь конструктивные ограничения, которые необходимо учитывать.
[0053] В качестве другого примера данных 85 о судне текущие операции (бурение, добыча или разведка), выполняемые целевым судном (20), могут предписывать, сколько времени необходимо, чтобы остановить судно (20) и при необходимости переместить его в другое местоположение. Другими словами, судну (20) может потребоваться остановить бурение, вытащить трубопровод или втянуть сейсмокосы перед тем, как судно (20) можно перемещать или перенаправлять, и эти операции могут требовать конкретного количества времени для завершения. Если эти операции происходят на судне (20), то любой период времени для оценки риска может учитывать длину времени для завершения "заданных" (то есть установленных или плановых) операций, для остановки операций (например, прекратить бурение, убрать трубопровод, замотать сейсмокосы и т. п.), перемещения судна (20), эвакуации персонала и т. п. Любые рассматриваемые интервалы времени будут зависеть от типа участвующего сооружения (то есть судна 20), типа выполняемых "заданных" (то есть установленных или плановых) операций (например, бурение, добыча, разведка и т. п.) и других факторов.
[0054] Чтобы получать и передавать все эти собранные данные (блок 72), которые показаны на фиг. 4A, клиент-серверная архитектура 100 использует различные виды связи (блок 74). Как отмечается во всех отношениях, различные компоненты системы 10 могут использовать любой из некоторого количества доступных видов связи (блок 74) для исследуемой окружающей среды. Вообще, спутниковая или радиосвязь может использоваться в зависимости от метеорологических условий, и можно использовать другие виды беспроводной связи с использованием ретрансляционных станций и т. п. Станет понятно, что можно использовать многие типы систем связи.
[0055] Передав собранные данные (блок 72), клиент-серверная архитектура 100 проходит различные процессы принятия решений (блок 76) для выработки управляемой реакции (блок 78). Процесс принятия решений (блок 76) может использовать алгоритмы предсказания, деревья решений, оценку риска и другие методики и может осуществляться с помощью автоматической компьютерной обработки и вмешательства человека, чтобы справиться с угрозами целевому судну 20 от льда и т. п.
[0056] В частности, архитектура 100 в процессах принятия решений и реакции (блоки 76 и 78) управляет ресурсами и источниками 80 данных и сбором данных (блок 72) путем отслеживания, направления и конфигурирования судов 30, маяков 40 и т. п. для сбора данных и принятия мер в ответ на угрозы. Тогда клиент-серверная архитектура 100 может предоставить операторам на судах 20/30 результаты 90, например управление 91 ресурсами, оценку 92 риска, сигналы 93 тревоги, команды 94 и контроль 95.
[0057] При управлении 91 ресурсами операторы системы могут, например, управлять различными задачами и операциями судов 30, маяков 40, транспортных средств 50 и других ресурсов возле целевого судна 20. Когда операции продолжаются, результаты для оценки 92 риска могут предсказывать угрозы, назначать приоритет задачам и выполнять другие оценки, включая анализы моделей дрейфа и буксировки. Затем в зависимости от угроз и их серьезности можно подавать сигналы 93 тревоги на основе различных интервалов или ступеней времени, чтобы предупреждать операторов об угрозах целевому судну 20.
[0058] В конечном счете операторы могут ретранслировать команды 94 другим компонентам системы 10, например судам и т. п., и могут руководить планом действий и организовывать реакцию на угрозы. При контроле 95 клиент-серверная архитектура 100 контролирует всю работу путем регистрации собранных данных и создания отчетов и т. п. для дальнейшего анализа.
5) Работа системы
[0059] Исходя из компонентов системы 10, ее архитектуры 100 и различных используемых процессов обратимся теперь к обсуждению того, как работает система 10 моделирования для защиты целевого судна 20 от угроз в заданной области. Снова текущий пример сосредоточен на угрозах, встречающихся в покрытой льдом области, но система 10 может применяться к любой морской области, в которой можно встретить угрозы.
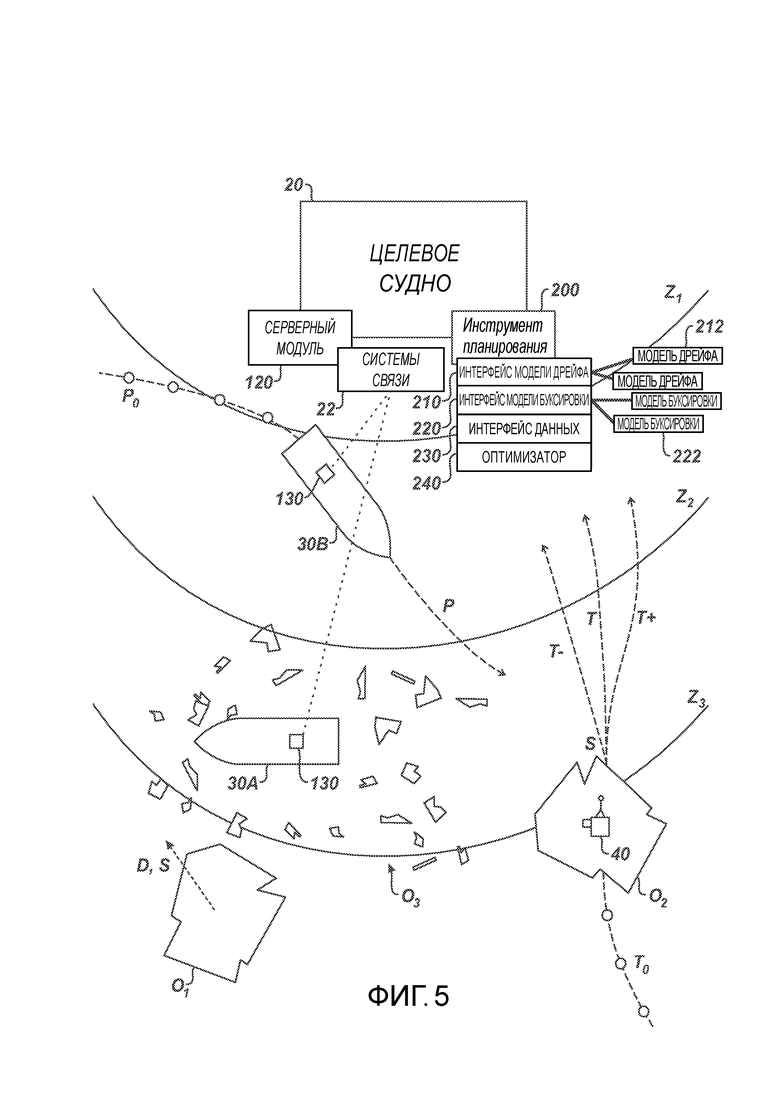
[0060] Чтобы проиллюстрировать, как идентифицируются и контролируются угрозы, и как формируются задачи и планы для борьбы с ними, обратимся к показанному на фиг. 5 примеру, в котором компоненты системы 10 показаны концептуально вместе с некоторыми возможными графическими элементами, которые могут отображаться в интерфейсах пользователя системы 10, например в инструменте 200 планирования, который описан в этом документе. Целевое морское сооружение или судно 20 показано только с некоторыми своими компонентами, включающими серверный модуль 120, систему 22 связи и инструмент 200 планирования, но также присутствуют и другие компоненты. Эти компоненты, например инструмент 200 планирования, не должны располагаться специально в одном месте (то есть целевом судне 30), а вместо этого могут распределяться или располагаться где-то в другом месте в системе.
[0061] В этом примере также показаны два судна 30a-b обеспечения, при этом каждое имеет клиентский модуль 130. Наконец, в этом примере показаны различные ледовые препятствия O, включающие в себя первое препятствие O1, второе препятствие O2 и различные мелкие препятствия O3. Одно из этих препятствий O2 имеет размещенный на нем маяк 40.
[0062] Вообще, морскими препятствиями O могут быть плавающие обломки, сброшенный груз, мусор, айсберги, плавучие льдины и другие плавучие угрозы для целевого судна 20, переносимые океаном и течениями, и морские препятствия O можно задавать в виде одноточечных или многоточечных объектов в системе 10. Каждое морское препятствие O в системе 10 может иметь набор ассоциированных с ним атрибутов - некоторые из которых могут отображаться, как описано позже. Атрибуты можно получать различными способами, например, введенные вручную координаты; графически заданная информация с помощью экрана дисплея и управления мышью; автоматически полученные из радиолокационных целей, спутниковых изображений или маяка 40; и другими способами.
[0063] На целевом судне 20 и судах 30 обеспечения серверные и клиентские модули 120/130 могут использоваться для создания и удаления различных морских препятствий O в окрестности целевого судна 20. Информация о препятствии передается предпочтительно автоматически между каждым из судов 20/30. Для согласованности в системе 10 информация о препятствии автоматически распространяется между различными судами 20/30.
[0064] При использовании обмена информацией информация о препятствии может, например, отображаться в локальных интерфейсах пользователя дальних судов 30 обеспечения. Эти локальные интерфейсы пользователя изображают по меньшей мере все активные угрозы в локальной области. Используя клиентские модули 130, локальные операторы на судах 30 обеспечения могут создавать и удалять препятствия O в системе 10 и изменять их атрибуты. Во время контрольных мероприятий суда 30 обеспечения также могут физически отмечать препятствия O одноразовыми навигационными маяками 40, используемыми для отслеживания перемещения препятствия в реальном масштабе времени.
[0065] Инструмент 200 планирования включает в себя интерфейс 210 модели дрейфа, интерфейс 220 модели буксировки и интерфейсы 230 данных. Интерфейс 210 модели дрейфа взаимодействует с множеством доступных моделей 212 дрейфа. Аналогичным образом интерфейс 220 модели буксировки взаимодействует с множеством доступных моделей 222 буксировки. Интерфейсы 230 данных принимают данные в качестве входа для обработки и выводят данные для отображения, анализа и сравнения. Соответственно, входные данные включают в себя, но не ограничиваются, метеорологические данные, данные о буксире, данные о препятствии, данные о целевом судне и т. п. Выходные данные могут включать в себя любой подходящий вид данных для просмотра, анализа, сравнения и т. п. в соответствии с раскрытыми в этом документе целями.
[0066] Функция 240 оптимизации в инструменте 200 планирования дает пользователям системы возможность сравнивать друг с другом различные модели 212 и 222 дрейфа и буксировки. Это позволяет пользователям системы контролировать каждую модель 212, 222 для сравнения и оценки качества предсказания с фактическими наблюдаемыми данными. Например, инструмент 200 планирования может показать сравнения в "рейтинговой таблице" или другом интерфейсе отображения, чтобы пользователь системы изучил и выбрал наиболее эффективную модель 212, 222 для использования. В таблицу можно включить другие релевантные данные для принятия решений, включая сезонные колебания и характер приливов.
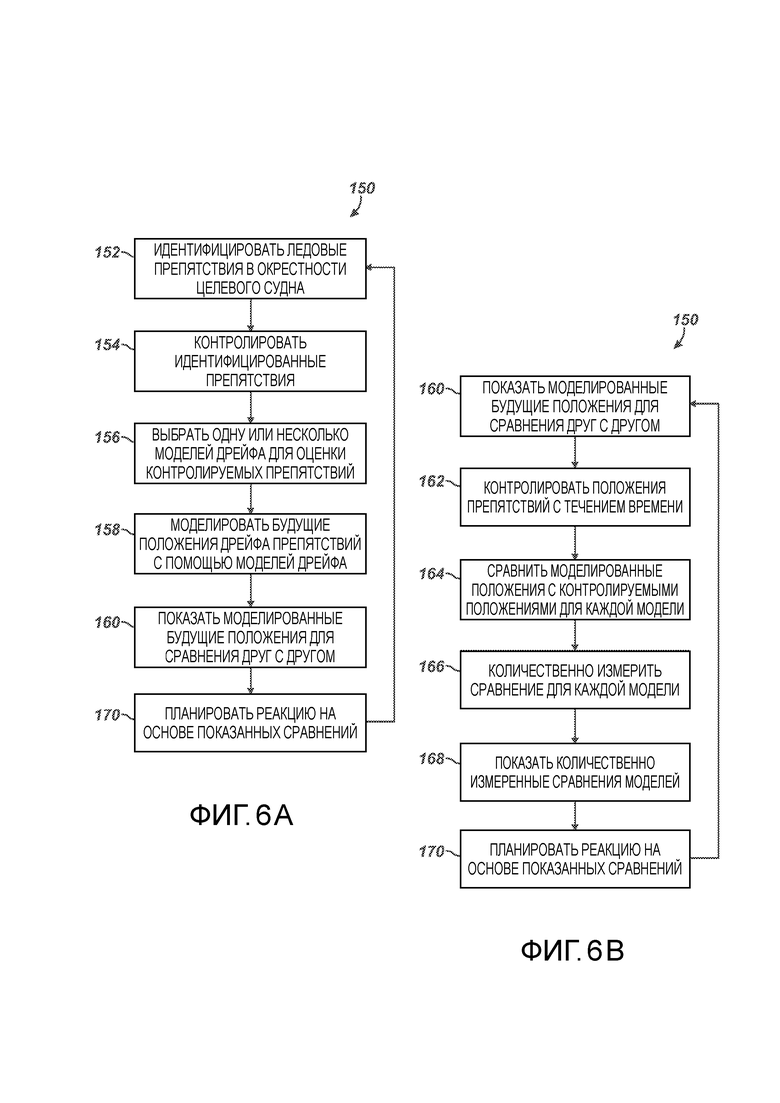
[0067] Обсуждая конкретные примеры работы системы со ссылкой на фиг. 5, обсуждение также обращает внимание на процесс 150 моделирования, показанный на фиг. 6A. Хотя уже обсуждалась общая методология, процесс 150 на фиг. 6A для контроля дрейфа льда относительно целевого морского сооружения или судна 20 излагается с некоторыми дополнительными подробностями.
[0068] В процессе контроля (150) операторы системы обращаются к интерфейсам 230 данных у инструмента 200 планирования раскрытой системы 10, что дает операторам системы возможность контролировать препятствия O. Сначала операторы системы идентифицируют морские препятствия O в окрестности целевого судна 20 (этап 152). Как отмечалось раньше, можно использовать визуальное наблюдение, получение изображений через спутники, получение изображений льда и т. п. Подробности о положении, размере, форме, направлении препятствия и т. п. импортируются в инструмент 200 планирования системы, и операторы системы могут использовать инструмент 200 планирования для создания и редактирования подробностей о препятствиях O. Некоторые, если не все, эти функции можно автоматизировать с использованием компьютерных программ.
[0069] Инструмент 200 планирования с течением времени контролирует положение этих идентифицированных препятствий O относительно целевого судна 20 (этап 154). Этот контроль создает прошлые курсы T препятствий O, которые операторы системы могут видеть и анализировать с помощью системы 10. Затем инструмент 200 планирования работает для объединения данных из нескольких моделей 212 дрейфа путем взаимодействия с несколькими моделями 212, прогона моделей 212 дрейфа и отображения результатов.
[0070] Например, выбирается одна или несколько моделей 212 дрейфа для оценки контролируемых ледовых препятствий O (этап 156). Этот выбор может быть автоматизированным, заданным пользователем или основываться на ручном выборе пользователя на основе предпочтений. Для работы с несколькими моделями 212 интерфейсы 210 модели дрейфа в системе 10 используют программную инфраструктуру, допускающую интеграцию с некоторым количеством доступных моделей 212 дрейфа. Поэтому любые внешние программные модели 212, используемые инструментом 200 планирования, предпочтительно имеют совместимые и стандартизованные форматы и интерфейсы данных для взаимодействия с инструментом 200 планирования.
[0071] Модели 212 дрейфа для айсбергов и других ледовых препятствий являются математическими компьютерными алгоритмами, которые разрабатываются для предсказания будущего перемещения (дрейфа) заданного айсберга (айсбергов) или другого ледового препятствия. Входы в такие модели 212 включают в себя положение, время, размер, форму и наблюдения за окружающей средой, например океаническое течение, ветер, температуры, и постоянные окружающей среды либо физические статические свойства. К тому же модели 212 дрейфа могут включать в себя пространственные модели течений на различных глубинах и пространственные прогнозы или предсказания ветра. Данные для потоков воды, ветровых течений и других прогнозов можно получать от поставщиков внешних данных, например, рассмотренных выше.
[0072] Моделирование будущих положений с помощью моделей 212 дрейфа может выводиться вручную по желанию пользователя или может быть автоматическим либо заданным пользователем. Например, когда становятся доступны новые данные (получены новые наблюдения айсбергов или гидрометеорологические данные окружающей среды), инструмент 200 планирования может автоматически прогонять каждую модель 212 дрейфа, хотя этим может управлять пользователь.
[0073] Как минимум, модели 212 дрейфа экстраполируют будущее положение (положения) или курс (курсы) ледовых препятствий O на основе наблюдаемых данных айсбергов. При более сложном моделировании модели 212 дрейфа учитывают некоторое количество других переменных и математических зависимостей, указанных выше. Модели 212 дрейфа также могут предсказывать условия таяния и события отламывания (раскалывания), которые могут происходить во время перемещения айсберга (айсбергов) O.
[0074] Когда работает система 10, инструмент 200 планирования моделирует будущие положения дрейфа препятствий O с помощью моделей 212 дрейфа (этап 158). Вход в модели 212 в инструменте 200 планирования может включать в себя время в будущем, в которое оператор желает предсказать дрейф препятствий по отношению к целевому судну 20. Результаты каждой из моделей 212 включают в себя будущие положения дрейфа препятствия для заданного времени предсказания в будущем. В конечном счете инструмент 200 планирования посредством этого может предсказывать будущее положение (положения) и курс (курсы) T для препятствий O на основе моделей 212 дрейфа, прошлых перемещений, океанических течений, размера и положения препятствий и т. п. Тогда это будущее положение (положения) дрейфа и курс (курсы) T задают, какие угрозы могут существовать для целевого судна 20, и в какие возможные периоды времени те угрозы могут стать неизбежными.
[0075] Как только определяются моделированные будущие положения, инструмент 200 планирования показывает моделированные будущие положения для сравнения друг с другом (этап 160). Как подробно изложено ниже, показ моделированных будущих положений может использовать интерфейсы 230 данных в инструменте 200 планирования, чтобы отображать результаты для сравнения. На основании показанных результатов операторы системы могут использовать инструмент 200 планирования, чтобы планировать реакцию (например, различные задачи) на предсказанные угрозы (этап 170).
[0076] Для этого операторы системы могут конфигурировать некоторое количество задач или назначений для выполнения судами 30 обеспечения и другими компонентами. Эти различные задачи можно организовать в различные сценарии, в которых конкретные ресурсы (например, суда 30 обеспечения, маяки 40, дистанционные транспортные средства 50 и т. п.) используются разными способами для борьбы с предсказанными угрозами. Каждый сценарий по существу является моделью предсказаний, показывающей возможные перемещения и изменения угроз в окружающей среде и возможные стратегии и задачи для борьбы с теми угрозами. Таким образом, сценарии позволяют операторам системы создавать и анализировать несколько гипотетических ситуаций с использованием наблюдаемых данных, доступных в системе 10. Каждый сценарий может содержать отличающиеся примененные модели предсказания и может позволять операторам системы визуализировать возможные исходы и угрозы.
[0077] Для каждого сценария раскрытая система 10, которая показана, например, на фиг. 5, использует выбранные модели предсказания морских препятствий для предсказания курса T для каждого препятствия O (например, на основе моделей 212, 222 дрейфа и буксировки) и постоянно проверяет вероятность будущих столкновений. Целевому судну 20 также можно назначить несколько границ Z безопасности, например границы Z1, Z2 и Z3 на фиг. 5. Если какое-нибудь из морских препятствий O вторгается в границы Z безопасности судна, то система 10 поднимает тревогу, которую можно отобразить и зарегистрировать. Эта информация позволяет операторам системы выбирать оптимальный план действий для защиты целевого судна 20.
[0078] Дополнительные примеры работы системы со ссылкой на примерную компоновку компонентов, показанную на фиг. 5, раскрываются во включенной заявке США № 14/077467 и для краткости здесь не повторяются.
[0079] На последующем уровне инструмент 200 планирования отслеживает модели 212 и их моделированные будущие или последующие положения с течением времени, сравнивает точность результатов, ранжирует модели 212 и дает операторам возможность выбирать предпочтительные модели 212. В частности, фиг. 6B показывает дополнительные этапы в процессе 150 для обращения к моделям, чтобы планировать реакцию на ледовые препятствия. При показе моделированных будущих положений для сравнения друг с другом (этап 160) инструмент 200 планирования контролирует положения препятствий O с течением времени (этап 162). Для каждой модели 212 инструмент 200 планирования сравнивает измененные положения с контролируемыми положениями для ледовых препятствий O (этап 164). Это показывает точность моделей 212 на основе того, что они предсказывали ранее, и что фактически происходит с ледовым препятствием O.
[0080] Сравнение для каждой модели 212 измеряется количественно (этап 166), и количественно измеренные сравнения моделей 212 показываются для оценки (этап 168), поэтому реакцию можно спланировать лучше на основе показанных сравнений (этап 170). Например, точность для каждой из моделей 212 может отображаться в виде точности в процентах или другого статистического показателя моделей 212 относительно фактического отслеживаемого положения препятствий O. Точность каждой модели 212 может отображаться относительно одной или нескольких других моделей 212 для сравнительных целей. Эти и другие сравнительные величины могли бы использоваться для содействия оператору системы или любой автоматизированной функции в инструменте 200 планирования при планировании реакции.
[0081] Как отмечалось ранее, система 10 моделирования использует некоторое количество интерфейсов 230 данных для отображения информации о судах 20/30. Вообще, эти интерфейсы 230 данных могут показывать спутниковые данные о льдах, ледовые препятствия, радиолокационные цели, маяки, суда и другие элементы системы 10 моделирования. Также можно видеть атрибуты различных элементов, и можно сконфигурировать несколько дисплеев.
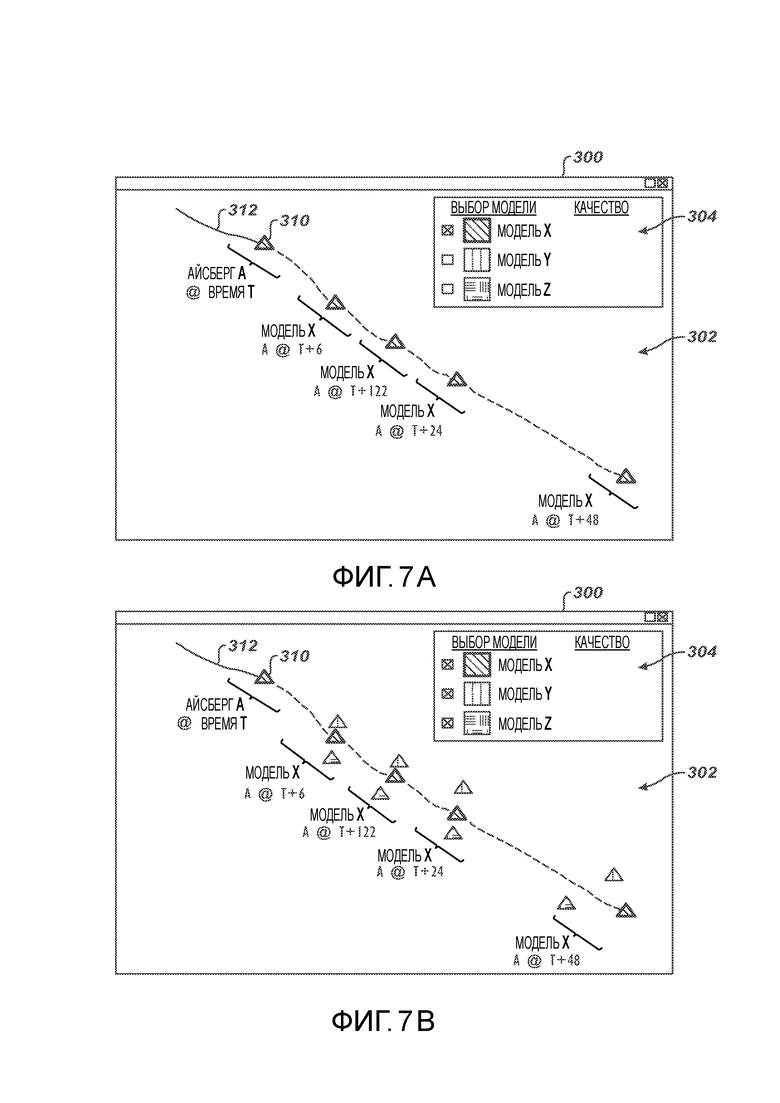
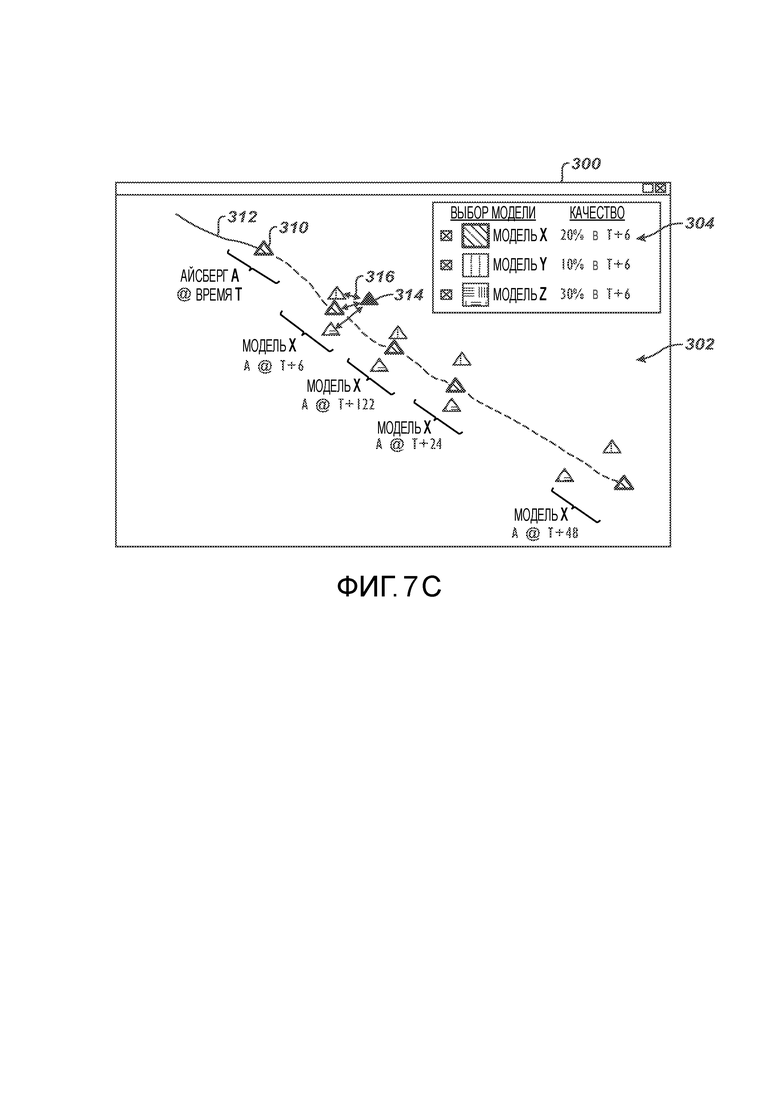
[0082] Ниже со ссылкой на фиг. 7A-7C описываются некоторые примеры экрана 300 интерфейса пользователя для раскрытой системы 10. Как станет понятно с помощью настоящего раскрытия изобретения, операторы системы могут использовать эти различные экраны 300 интерфейса пользователя, а также другие, подробно не изложенные в этом документе, чтобы визуализировать окружающую среду, рабочие параметры, вычисления моделей дрейфа и буксировки и другую полезную информацию. Экран 300 интерфейса пользователя может быть частью инструмента планирования (200; фиг. 3B и 5), работающего в архитектуре 100 системы на судах 20/30 или в другом месте, поэтому операторы могут рассматривать информацию, конфигурировать систему 10, отслеживать и контролировать угрозы и планировать задачи и другие действия в ответ.
[0083] На фиг. 7A экран 300 отображает участок карты 302 в исследуемой области, на котором изображается идентифицированное ледовое препятствие 310 (например, айсберг). Показан прошлый курс 312 препятствия 310, ведущий к текущему или заданному положению препятствия 310 в момент T. Панель 304 выбора модели может использоваться для выбора, какую модель дрейфа (модель X) применять к препятствию 310 и текущим условиям окружающей среды. Здесь для отображения выбрана только одна модель.
[0084] Текущее положение препятствия 310 отображается в момент T в конце прошлого курса 312, который можно контролировать с течением времени с помощью информации прошлых периодов. Исходя из этого последующие положения дрейфа препятствия 310, которые промоделированы, показаны для одной модели (то есть модели X) в вычисленные интервалы времени (T+6, T+12 и т. п.).
[0085] Система моделирования по очереди вводит последние данные и положения препятствия в выбранную модель (модели) и получает предсказанные положения для некоторого количества периодов времени в будущем из анализов моделей. Например, учитывая последние условия окружающей среды и положение препятствия 310 в момент T, система моделирования с помощью каждой модели предсказывает, где будет расположено препятствие 310 в момент T+6 часов, T+12, T+24 и T+48. Затем система моделирования может записать все предсказанные положения от каждой модели для отображения, контроля и дальнейшей оценки. Например, фиг. 7B показывает интерфейс 300 пользователя, показывающий предсказанные положения для препятствия 310 от нескольких моделей X, Y и Z для моментов T+6ч, T+12ч, T+24ч, T+48ч в будущем.
[0086] С течением времени предсказанные положения от каждой модели 212 оцениваются по фактическому наблюдаемому положению препятствия 310, которое получается посредством отслеживания, наблюдения, спутниковых данных, разведки и т. п. В предыдущем примере в момент T+6 часов 6-часовое предсказание, сделанное в момент T, будет сравниваться с наблюдаемым положением в момент T+6. Как показано, например, на экране 300 из фиг. 7C, фактическое положение 314 для препятствия 310 в момент T+6 отображается в сравнении с предсказанными положениями в тот момент T+6 для моделей. Разность 316 положений между фактическим положением 314 и предсказанными положениями можно записать и использовать в качестве показателя качества каждой модели при предсказании на 6 часов в будущем. По прошествии большего времени разницы 316 положений для каждого интервала времени также могут записываться и использоваться в качестве показателя качества моделей.
[0087] После некоторого периода времени инструмент 200 планирования формирует историю того, как показала себя каждая модель 304 при предсказании положений препятствия на некотором количестве периодов времени. Статистика качества может использоваться для создания рейтинговой таблицы 306 моделей 304, из которой пользователь может выявить наиболее эффективную модель 304 для сконфигурированных периодов времени. Таким образом, инструмент 200 планирования может дать пользователю системы возможность оценивать качество моделей 304, а затем выбирать предпочтительные модели 304 в этих условиях. Фактически, пользователь может использовать результаты качества моделей 304 дрейфа, чтобы выбрать модель 304 дрейфа для передачи предсказанных положений в другие модули инструмента 200 планирования, например, оценивающие модели буксировки, что обсуждается ниже.
[0088] Когда модель (модели) дрейфа указывает, что ледовое препятствие представляет угрозу целевому морскому сооружению, у ответственного за управление ледовой обстановкой есть два выбора: переместить целевое сооружение, чтобы избежать угрозы, или переместить айсберг, чтобы обойти целевое сооружение. На постоянно идущем судне, например типовом корабле, операторы могли бы просто управлять кораблем для обхода ледовой угрозы. Как правило, это не возможно или даже не целесообразно с целевым морским сооружением, которое раскрывается в этом документе, проводящим заданную работу в покрытой льдом окружающей среде. Как обсуждалось в этом документе, целевое морское сооружение, проводящее заданную работу, нельзя быстро переместить, и его не предполагается или не требуется перемещать без крайней необходимости. Фактически, целевое сооружение, выполняющее заданную работу, может быть сейсморазведочным судном, буксирующим несколько километров косы позади себя, или может быть даже неподвижным судном, например установкой для бурения, буровым судном, FPSO и т. п. Перемещение этих судов является дорогой и трудоемкой операцией. По этой причине предпочтительным вариантом является перемещение самого айсберга или препятствия, и как предполагается, это трудное и опасное мероприятие.
[0089] Поэтому для планирования реакции анализ на основе показанных сравнений в системе 10 моделирования также принимает во внимание модели буксировки, в которых препятствия перемещаются или изменяются во время их дрейфа относительно целевого морского сооружения. Таким образом, в дополнение к использованию моделей 212 дрейфа для контроля ледовых препятствий инструмент 200 планирования может дополнительно использовать модели 222 буксировки, чтобы контролировать ледовые препятствия и планировать реакцию, например, буксирование ледовых препятствий.
[0090] Борьба с угрожающим айсбергом или другим ледовым препятствием путем буксирования включает в себя перемещение айсберга из опасной области и его размещение там, где океанические течения не принесут его обратно. Как станет понятно, буксирование ледового препятствия может включать в себя вытягивание (буксирование), толкание, ведение и т. п., и известны способы, как соединяться и захватывать айсберг, и для краткости они не излагаются здесь подробно. Вообще, для буксировки айсберга судно обеспечения может обернуть специальный буксировочный трос для айсбергов вокруг айсберга и может отбуксировать айсберг в безопасную область.
[0091] При планировании буксировки айсбергов учитывается некоторое количество факторов, включая рассмотрение размера и формы айсберга, массу, осадку, близость к объектам, океанические течения, ветровую обстановку, доступность судна обеспечения, мощность, необходимую буксиру для буксировки айсберга, подходящее место для сброса айсберга, расстояние буксировки и время, которое потребуется для буксировки айсберга. Более того, от буксира требуется некоторое количество технических характеристик для эффективной буксировки айсберга, и здесь они также не излагаются подробно. В любом случае из-за сложности операции принятие верного решения о буксировании может представлять проблему, особенно когда у операторов есть несколько айсбергов, угрожающих целевому морскому сооружению в некой области, когда у операторов есть несколько вариантов зон сброса, и когда имеется ограниченная доступность буксиров.
[0092] Поскольку препятствия можно буксировать в ходе планирования и контроля с помощью системы 10, как отмечалось выше, инструмент 200 планирования взаимодействует с несколькими моделями 222 буксировки, прогоняет модели 222 буксировки и отображает результаты, так что операторы могут соответствующим образом планировать операции буксировки.
[0093] Например, фиг. 8 показывает дополнительные этапы в процессе (150) для оценки моделей 212, 222 дрейфа и буксировки, чтобы планировать реакцию на ледовые препятствия O. При показе моделированных положений ледового препятствия (этап 160) инструмент 200 планирования использует одну или несколько моделей 222 буксировки для оценки контролируемых препятствий O (этап 180) и моделирует одно или несколько будущих или последующих положений буксировки препятствия O (этап 182). При прогоне моделей 222 буксировки инструмент 200 планирования может автоматически вычислять предлагаемый курс T плавания судна, необходимый для осуществления задачи, начинающийся от текущего положения судна или от конца предыдущей задачи. Раскрытая система 10 моделирования также вычисляет предполагаемое время для перехода между задачами.
[0094] Принятие верного решения о буксировке в нужное время является сложной задачей. В заданном положении буксировки можно освободить буксируемое ледовое препятствие O, но тогда препятствие O будет дрейфовать относительно целевого сооружения 20 и может по-прежнему представлять угрозу. Тогда, конечно, как только сбрасывается или освобождается ледовое препятствие O, снова является важным знание того, куда будет дрейфовать препятствие O. Поэтому инструмент 200 планирования также моделирует будущие или последующие положения дрейфа препятствий O с помощью моделей 212 дрейфа на основе будущих положений буксировки (этап 184). Затем моделированные будущие положения буксировки и дрейфа показываются для сравнения друг с другом (этап 186). Используя все эти моделированные положения дрейфа и буксировки, пользователь системы может использовать инструмент 200 планирования для планирования реакции на основе показанных сравнений (этап 170). Таким образом, на дополнительном уровне аналогично тому, что раскрывается выше со ссылкой на фиг. 6B, инструмент 200 планирования отслеживает результаты этих моделей 222 буксировки с течением времени, сравнивает точность результатов, ранжирует модели 222 буксировки и дает операторам возможность выбирать предпочтительную модель (модели) 222 буксировки по ситуации.
[0095] Фиг. 9A иллюстрирует экран 400 интерфейса пользователя в инструменте планирования (200), содержащий препятствие 410 (например, айсберг в заданный момент T) в конце прошлого курса 412. Как и раньше, препятствие 410 показано на участке карты 402 в исследуемой области. Ресурсные суда 420A-B показаны относительно препятствия 410 и целевого судна 430. Две предсказанные зоны 440A-B сброса показаны для возможного освобождения препятствия 410 при буксировании одним или обоими судами 440A-B. Вообще, зону 440 сброса можно рассматривать как заданную область, где можно сбросить ледовое препятствие 410 (то есть айсберг) при буксировке, чтобы морские течения и ветер вытолкнули его подальше от целевого сооружения 430.
[0096] Как только ледовое препятствие 410 идентифицировано как угроза, пользователь системы может отметить препятствие 410 для буксирования с помощью инструмента 200 планирования на экране 400 интерфейса пользователя. После отметки пользователь системы может перетащить препятствие 410 на карту 402 и бросить его в определенной зоне 440A-B сброса. В качестве альтернативы для анализа можно рассматривать все зоны 440 сброса. В отношении зон 440 сброса пользователь может создавать новую зону 440 сброса, перемещать существующие зоны 440 сброса и т. п. для оценки. Более того, система моделирования может вычислять ожидаемые зоны сброса на основе обсуждаемого ниже анализа.
[0097] Как только выбирается зона (зоны) сброса, или препятствие 410 отмечается для буксирования, инструмент 200 планирования вводит свойства препятствия (положение, размер, массу, осадку, снос), подробности окружающей среды (ветер, течение и другие факторы окружающей среды) и подробности известных или ожидаемых зон сброса в одну или несколько моделей буксировки. Затем модели буксировки обрабатывают входные данные и возвращают подробности буксировки для выбранной зоны (зон) сброса.
[0098] На фиг. 9B, например, изображаются ожидаемые маршруты 442, 444 буксировки для буксирования ледового препятствия 410 в две примерные зоны 440A-B сброса. Также могут изображаться различные данные об условиях окружающей среды (ветер и течение), так как они используются в моделях буксировки. Как дополнительно изображено на фиг. 9C, затем может выполняться анализ на модели дрейфа в положении препятствия 410, буксируемого по ожидаемым маршрутам 442, 444 буксировки в зоны 440A-B сброса. В результате прогона моделей буксировки и моделей дрейфа, которые раскрываются в этом документе, могут вычисляться и отображаться подробности маршрутов буксировки и предсказанных положений 450A-B дрейфа сброшенного ледового препятствия 410, как показано на фиг. 9C.
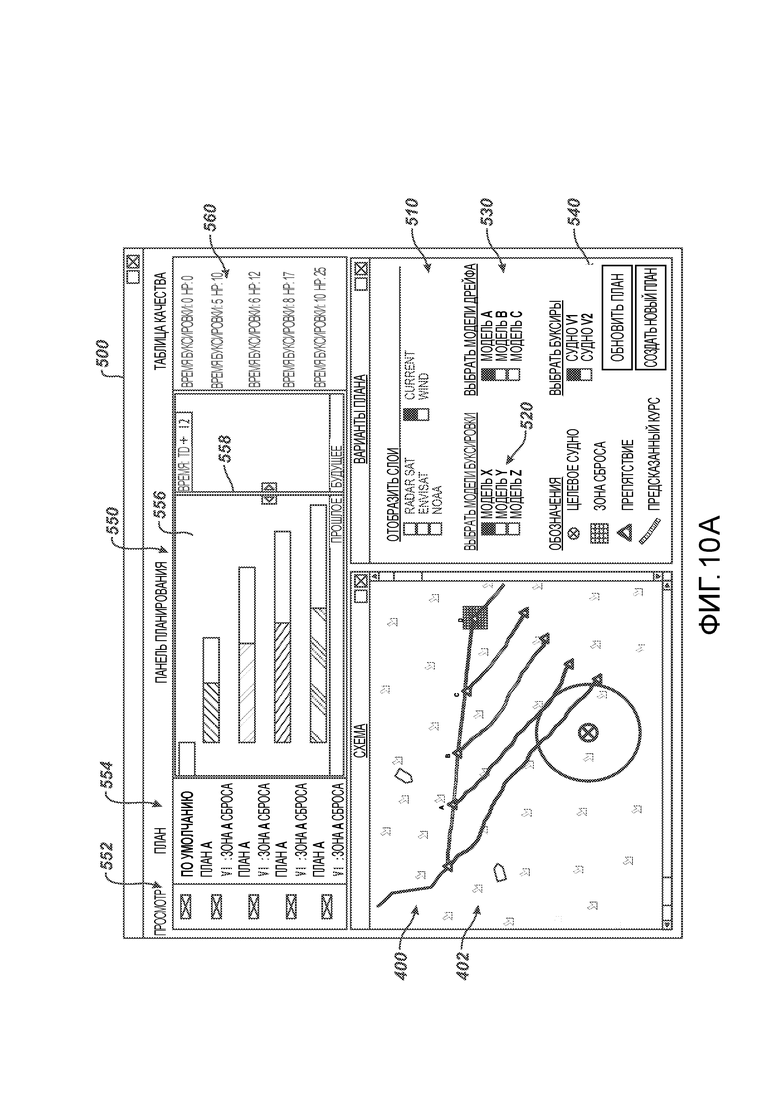
[0099] Фиг. 10A показывает дополнительный экран 500 интерфейса пользователя в инструменте 200 планирования для оценки и планирования моделей буксировки и дрейфа. Экран 500 включает в себя отображение 400 карты, варианты 510 отображения, выбор 520 модели буксировки, выбор 530 модели дрейфа, выбор 540 буксира, панель 550 планирования и рейтинговую таблицу 560.
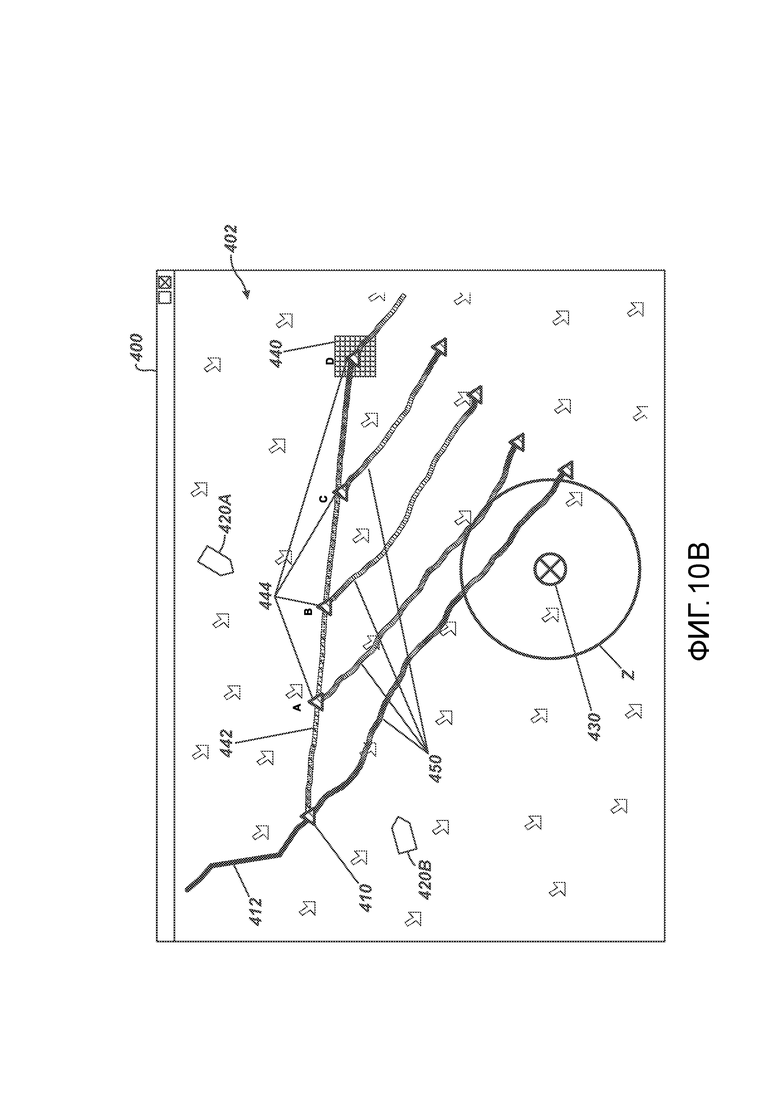
[0100] Экран 400 отображения карты аналогичен рассмотренному выше и подробнее показан на фиг. 10B. В инструменте планирования (200) также известно положение каждого судна 420, 430, и флот допускающих буксировку судов 420 известен и определен для доступа при планировании. Тяговая мощность судна может задаваться как часть этого определения. Запланированные задачи для каждого судна 420, 430 также можно задавать и показывать в панели 550 планирования, предоставляя пользователю временной вид доступности каждого судна. Варианты 510 отображения позволяют пользователю отображать различные условия окружающей среды (например, ветер, течение и т. п.) в виде слоев на экране 400 карты.
[0101] Как отмечалось выше, инструмент планирования (200) конфигурируется для объединения с любой из множества моделей буксировки и дрейфа для анализа. В частности, выбор 520 модели буксировки и выбор 530 модели дрейфа позволяют пользователю выбирать соответственно, какие модели буксировки и дрейфа использовать для вычисления и отображения на экране 400 карты. Поэтому вместо показа всех моделей буксировки и/или дрейфа пользователь может выбирать в выборах 520 и 550, какое одно или несколько предсказаний по моделям использовать для отображения вместе на карте 400. Выбор 540 судна позволяет пользователю выбирать при планировании одно или несколько доступных судов 420A-B для буксирования выбранного препятствия 410.
[0102] Панель 550 планирования позволяет пользователю задавать и выбирать различные планы для буксирования препятствия 410. Используя варианты 552, 554 просмотра и планирования, можно добавлять и просматривать планы, и их можно конфигурировать для выборов 540 доступных буксиров, выборов 520 моделей буксировки, выборов 530 моделей дрейфа, зон 440 сброса и других конфигурируемых факторов.
[0103] Панель 550 планирования также включает в себя календарь или временную шкалу 556 планов. Как показано на панели 550 планирования, пользователь может использовать один или несколько "временных ползунков" 558 для перемещения вперед или назад периода времени того, что отображается. Временные ползунки 558 позволяют пользователю видеть (и сравнивать) предсказания по моделям назад и вперед во времени. Положения для промежуточных моментов можно интерполировать и показывать на карте 400 на основе доступных точек данных из пошаговых вычислений. В конечном счете рейтинговая таблица 560 предоставляет сравнительные подробности для планов с целью оценки.
[0104] Как только пользователь системы идентифицировал угрожающее ледовое препятствие 410, одним планом действий может быть буксировка препятствия 410 из опасной области в безопасную зону 440 сброса. Перед тем, как может начаться действие буксирования, пользователь системы может анализировать ситуацию с помощью инструмента планирования (200) и экрана 500 интерфейса пользователя, чтобы ответить на некоторое количество вопросов. Например, пользователь системы может захотеть определить, какое судно 420 использовать для буксирования, где может находиться наилучшая зона 440 сброса для препятствия 410, когда будет наилучшее время для буксировки препятствия 410, сколько мощности и времени может потребоваться для буксировки препятствия 410 в выбранную зону (зоны) 440 сброса, есть ли доступные суда 420 с необходимой мощностью, и т. п. Инструмент 200 планирования обладает функциональными возможностями, чтобы помочь пользователю системы ответить на эти вопросы путем предоставления моделирования, вычисления и отображения, чтобы упростить процесс принятия решений.
[0105] Как показывает экран 500 интерфейса пользователя, инструмент планирования (200) включает подробности доступности буксира в результаты модели буксировки, позволяя пользователю фильтровать суда 420A-B на основе доступности, расстояния от препятствия 410 и мощности буксирования. Инструмент планирования (200) позволяет пользователю динамически задавать зону 440 сброса на карте 400 для анализа на модели буксировки и дрейфа. В качестве альтернативы в инструменте планирования (200) можно задать некоторое количество зон 440A-B сброса и сохранить в конфигурации. Зоны 440A-B сброса можно наглядно показать в виде слоя данных на карте 400 инструмента планирования.
[0106] Когда выбирается зона 440 сброса и буксир 420, пользователь выбирает одну или несколько моделей буксировки (выбор 520) для использования в прогнозе буксирования препятствия 410 с помощью выбранного буксира 420. Модель буксировки частично определяет, сколько займет маршрут буксировки, каково наилучшее местоположение зоны сброса, когда освободится буксир для буксирования некоторого другого возможного препятствия, и другие факторы.
[0107] Затем модели буксировки обрабатывают входные данные и возвращают подробности буксировки для выбранной зоны (зон) сброса, прерывистых положений или интервалов времени. Как показано на фиг. 10B, например, курс 442 буксировки для буксирования препятствия 410 из его текущего положения в возможную зону 440 сброса вычислен с помощью одной из выбранных моделей буксировки и показан на экране 400 карты. Также можно вычислить и отобразить промежуточные зоны сброса или положения 444 буксировки. (Для простоты иллюстрации на фиг. 10B изображается только одна применяемая модель буксировки. Как отмечалось в этом документе, в соответствии с настоящим раскрытием изобретения можно применять и выборочно показывать несколько моделей буксировки для сравнительных целей).
[0108] Модели буксировки возвращают из вычислений подробности буксировки, которые могут включать в себя время буксировки и мощность буксировки, необходимые для буксировки препятствия в каждую зону сброса. Эти подробности можно предоставить в рейтинговой таблице 560 из фиг. 40A. Другие входные и выходные подробности для анализа можно связать с другими целями решений, например эффективностью, повышенным запасом надежности и т. п.
[0109] Когда выбирается зона 440 сброса и буксир 420, пользователь также выбирает одну или несколько моделей дрейфа (выбор 530) для использования в прогнозе перемещения препятствия 410 после того, как оно сбрасывается в зонах 440 сброса или других местах, гарантируя, что препятствие 410 уйдет в безопасную область. Затем модели дрейфа обрабатывают входные данные и возвращают подробности дрейфа для выбранной зоны (зон) сброса, которые могут выбираться или не выбираться для отображения на карте 400. Как показано, например, на фиг. 10B, курсы 450 дрейфа для препятствия 410 из его текущего положения и промежуточных положений буксировки вычислены с помощью одной из выбранных моделей дрейфа и показаны на экране 400 карты. (Для простоты иллюстрации на фиг. 10B изображается только одна применяемая модель дрейфа. Как отмечалось в этом документе, в соответствии с настоящим раскрытием изобретения можно применять и выборочно показывать несколько моделей дрейфа для сравнительных целей).
[0110] Поскольку цель зон 440 сброса или других местоположений - убрать с пути препятствие, зона сброса может задаваться с помощью границ, как схематически изображено на фиг. 9A-9C и 10A-10B. Более того, целевое морское сооружение 430 может задаваться с помощью одной или нескольких рабочих зон или зон безопасности Z, например, показанных на фиг. 10B.
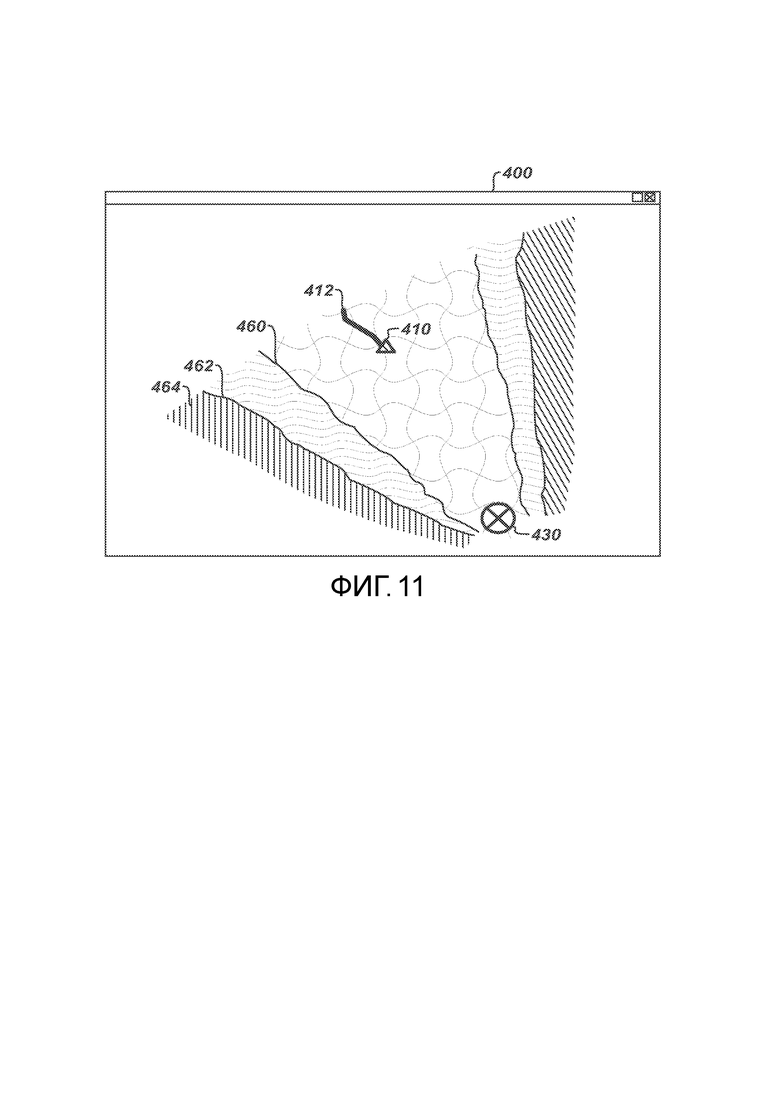
[0111] Альтернативное изображение экрана 400 показано на фиг. 11. Здесь границы 460, 462, 464 способны расширяться и открыты относительно целевого морского сооружения 430. Границы 460, 462, 464 вычисляются на основе моделей буксировки и дрейфа, учитывая текущие условия окружающей среды по отношению к взаимным положениям препятствия 410 и целевого морского сооружения 430. Таким образом, как только препятствие 410 выходит за одну или несколько границ 460, 462, 464, анализ буксировки и дрейфа может указывать, что перемещенное препятствие больше не угрожает целевому судну 430. Соответственно, границы 460, 462, 464 задают "безопасные зоны" за пределами целевого судна 430 и задают последовательность "приближающихся зон риска", простирающихся по ходу целевого судна 430.
[0112] Методики из настоящего раскрытия изобретения можно реализовать в цифровых электронных схемах либо в компьютерных аппаратных средствах, микропрограммном обеспечении, программном обеспечении или в их сочетаниях. Устройство для осуществления раскрытых методик на практике можно реализовать в компьютерном программном продукте, материально воплощенном в машиночитаемом запоминающем устройстве для исполнения программируемым процессором; а этапы способа из раскрытых методик могут выполняться "компьютерной системой" либо "технологическим оборудованием", которая (которое) может включать в себя один или несколько программируемых процессоров, исполняющих программу команд для выполнения функций раскрытых методик путем воздействия на входные данные и формирования вывода. Подходящий процессор для "компьютерной системы" в качестве примера может включать в себя универсальные и специализированные микропроцессоры. Как правило, процессор принимает команды и данные от постоянного запоминающего устройства и/или оперативного запоминающего устройства, включая магнитные диски, например внутренние жесткие диски и съемные диски; магнитооптические диски; и оптические диски. Запоминающие устройства, подходящие для материального воплощения команд и данных компьютерных программ, включают в себя все виды энергонезависимого запоминающего устройства, включая, в качестве примера, полупроводниковые запоминающие устройства, например EPROM, EEPROM и устройства на флэш-памяти; магнитные диски, например внутренние жесткие диски и съемные диски; магнитооптические диски; и диски CD-ROM. Любое из вышеупомянутого может быть дополнено ASIC (специализированные интегральные схемы) либо включено в них.
[0113] Предшествующее описание предпочтительных и других вариантов осуществления не предназначено для ограничения объема или применимости идей изобретения, задуманных заявителями. С помощью настоящего раскрытия изобретения станет понятно, что описанные выше признаки в соответствии с любым вариантом осуществления или аспектом раскрытого предмета изобретения можно использовать в одиночку или в сочетании с любым другим описанным признаком в любом другом варианте осуществления или аспекте раскрытого предмета изобретения.
[0114] Как обсуждалось ранее, раскрытая система и способы могут использоваться в покрытых льдом областях, имеющих глетчерный лед, паковый лед, плавучие льдины и другие ледовые препятствия. Однако раскрытая система и способы могут использоваться в других местоположениях, содержащих мусор, растения, плавающие обломки, сброшенный груз, морских животных либо другие помехи или препятствия, погруженные и/или плавающие в воде, которые могут мешать операциям бурения, добычи или разведки. Поэтому идеи из настоящего раскрытия изобретения не ограничиваются использованием только в покрытых льдом областях.
[0115] Хотя показаны лишь некоторые экраны интерфейса пользователя для системы 10 моделирования, станет понятно, что интерфейсы пользователя и различные модули системы 10 моделирования могут использовать некоторое количество экранов для ввода, изменения и отображения информации. Например, можно предусмотреть экран интерфейса пользователя, который позволяет операторам ретранслировать и передавать команды между судами, выполнять пункты действий, изменять или конфигурировать систему моделирования и т. п.
[0116] В обмен на раскрытие содержащихся в этом документе идей изобретения заявители требуют все патентные права, предусмотренные прилагаемой формулой изобретения. Поэтому предполагается, что прилагаемая формула изобретения включает в себя все модификации и изменения во всех случаях, когда они входят в объем нижеследующей формулы изобретения либо ее эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА МОНИТОРИНГА И ЗАЩИТЫ ОТ МОРСКОЙ УГРОЗЫ | 2012 |
|
RU2549153C1 |
| ОПЕРАЦИИ АРКТИЧЕСКОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2624835C2 |
| СИСТЕМА КООРДИНАЦИИ И ПЛАНИРОВАНИЯ ОДНОВРЕМЕННЫХ РАБОТ | 2015 |
|
RU2668835C2 |
| СПОСОБ АКТИВНОЙ БОРЬБЫ С АЙСБЕРГОВОЙ ОПАСНОСТЬЮ И УСТРОЙСТВО ДЛЯ АКТИВНОЙ БОРЬБЫ С АЙСБЕРГОВОЙ ОПАСНОСТЬЮ | 2012 |
|
RU2484209C1 |
| СПОСОБ АКТИВНОЙ БОРЬБЫ С АЙСБЕРГОВОЙ ОПАСНОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2425929C1 |
| СПОСОБ АКТИВНОЙ БОРЬБЫ С АЙСБЕРГОВОЙ ОПАСНОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467121C1 |
| Способ транспортировки ледового образования | 2023 |
|
RU2809879C1 |
| Способ транспортировки крупного айсберга | 2020 |
|
RU2743239C1 |
| НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС МОДЕЛИРОВАНИЯ ОПЕРАЦИЙ УПРАВЛЕНИЯ ЛЕДОВОЙ ОБСТАНОВКОЙ ВОКРУГ МОРСКИХ ПЛАВУЧИХ И ГРАВИТАЦИОННЫХ СООРУЖЕНИЙ | 2014 |
|
RU2593171C2 |
| БУРОВОЕ СУДНО | 1995 |
|
RU2136535C1 |
Система использует связь, интерфейсы пользователя и источники данных, чтобы идентифицировать морские препятствия (например, айсберги, плавучие льдины, паковый лед и т.п.) возле целевого сооружения, выполняющего заданные операции. Система контролирует положения этих идентифицированных морских препятствий относительно целевого сооружения с течением времени и предсказывает любые возможные угрозы. Когда предсказывается угроза, система планирует размещение судов обеспечения, маяков и т.п. для реакции на угрозу. Система и способ моделирования морских угроз защищают целевое морское сооружение в покрытых льдом или иных морских областях. 3 н. и 22 з.п. ф-лы, 19 ил.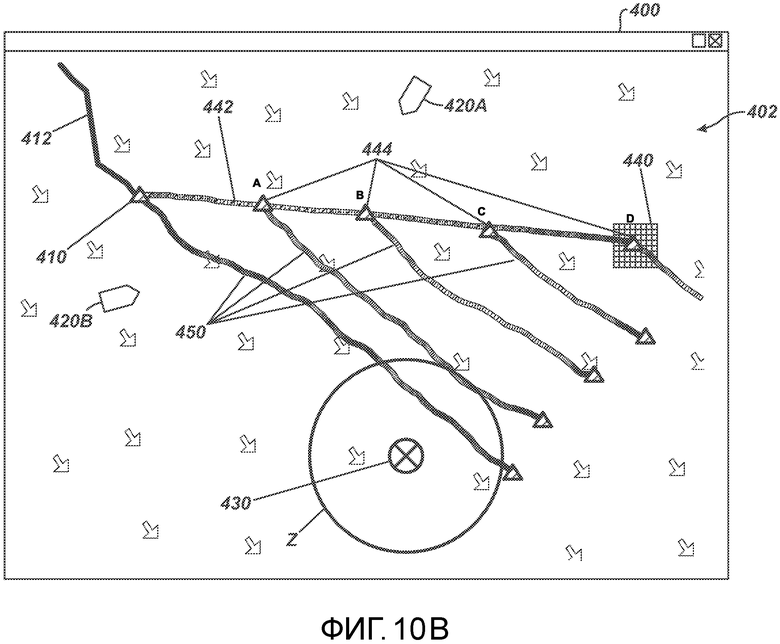
1. Способ моделирования морских угроз для целевого морского сооружения, проводящего заданную работу в водном пространстве, содержащий этапы, на которых:
контролируют по меньшей мере одно заданное положение по меньшей мере одного препятствия, дрейфующего в окрестности целевого морского сооружения, с помощью компьютерной системы, когда целевое морское сооружение проводит заданную работу в водном пространстве;
моделируют с помощью компьютерной системы по меньшей мере два различных маршрута буксировки, активно отклоняющих по меньшей мере одно препятствие с течением времени по меньшей мере из одного заданного положения относительно целевого морского сооружения с использованием по меньшей мере двух моделей маршрута буксировки для вычисления активного отклонения по меньшей мере одного препятствия в каждом из по меньшей мере двух различных маршрутах буксировки; и
показывают с помощью компьютерной системы по меньшей мере два различных маршрута буксировки для сравнения друг с другом.
2. Способ по п. 1, в котором по меньшей мере одно препятствие включают в себя айсберг, плавучую льдину, паковый лед, мусор, растения, плавающие обломки, сброшенный груз, плавающие препятствия, погруженные препятствия, морских животных, стаи рыб, стада китов или их сочетание и в котором целевое морское сооружение выбирается из группы, состоящей из бурового сооружения, бурового судна, добывающего сооружения, добывающего судна, эксплуатационной платформы, устьевого оборудования, трубопровода, разведывательного сооружения, сейсморазведочного судна.
3. Способ по п. 1 или 2, в котором этап, на котором контролируют по меньшей мере одно заданное положение по меньшей мере одного препятствия с помощью компьютерной системы, содержит один или несколько этапов, на которых:
принимают по меньшей мере одно заданное положение по меньшей мере от одного маяка, размещенного по меньшей мере на одном препятствии;
определяют по меньшей мере одно заданное положение из данных отображения окрестности целевого морского сооружения; и
получают введенные вручную данные по меньшей мере об одном заданном положении.
4. Способ по любому из пп. 1-3, в котором этап, на котором контролируют по меньшей мере одно заданное положение по меньшей мере одного препятствия, содержит этап, на котором моделируют один или несколько курсов дрейфа по меньшей мере одного препятствия с использованием одной или нескольких моделей дрейфа для вычисления пассивного дрейфа по меньшей мере одного препятствия с течением времени.
5. Способ по п. 4, дополнительно содержащий один или несколько этапов, на которых:
планируют с помощью компьютерной системы реакцию на одно или несколько курсов дрейфа;
планируют размещение по меньшей мере одного ресурса в ответ на одно или несколько курсов дрейфа;
планируют отвести по меньшей мере одно препятствие путем направления по меньшей мере одного судна относительно по меньшей мере одного препятствия; и
планируют разбить по меньшей мере одно препятствие с помощью по меньшей мере одного судна.
6. Способ по п. 5, в котором по меньшей мере две различные модели буксировки применяются по меньшей мере к одному заданному положению и/или по меньшей мере к одному из одного или нескольких последующих положений дрейфа по меньшей мере одного препятствия на одном или более курсе дрейфа.
7. Способ по любому из пп. 1-6, дополнительно содержащий этап, на котором моделируют с помощью компьютерной системы одно или несколько измененных курсов дрейфа по меньшей мере одного препятствия, дрейфующего от одного или нескольких положений буксировки из по меньшей мере двух различных маршрутов буксировки, с использованием одной или нескольких моделей дрейфа, примененных к одному или более последующему положению буксировки для вычисления пассивного дрейфа по меньшей мере одного препятствия во времени.
8. Способ по любому из пп. 4-7, в котором этап, на котором используют одну или несколько моделей дрейфа для вычисления пассивного дрейфа по меньшей мере одного препятствия, содержит этап, на котором выбирают одну или несколько моделей дрейфа из множества доступных моделей дрейфа.
9. Способ по п. 8, в котором этап, на котором выбирают одну или несколько моделей дрейфа, содержит этап, на котором принимают пользовательский выбор одной или нескольких моделей дрейфа из доступных моделей дрейфа.
10. Способ по любому из пп. 7, 8, 9, в котором этап, на котором моделируют с помощью компьютерной системы одно или более измененных курсов дрейфа по меньшей мере одного препятствия в течение времени относительно целевого морского сооружения, содержит прогнозирование с помощью компьютерной системы по меньшей мере одной угрозы целевому морскому сооружению от по меньшей мере одного или более измененных курсов дрейфа по меньшей мере одного препятствия.
11. Способ по п. 10, в котором показывают с помощью компьютерной системы по меньшей мере один или более измененных курсов дрейфа по меньшей мере одного препятствия для сравнения друг с другом.
12. Способ по п.11, дополнительно содержащий этапы, на которых:
количественно измеряют точность каждой из по меньшей мере двух моделей на основе сравнения; и
показывают количественно измеренную точность.
13. Способ по любому из пп. 1-12, в котором этап, на котором моделируют с помощью компьютерной системы по меньшей мере два различных маршрута буксировки, содержит этапы, на которых:
получают входные данные из одного или нескольких источников; и
создают выходные данные, представляющие по меньшей мере два различных маршрута буксировки, путем обработки полученных входных данных с помощью алгоритма каждой из по меньшей мере двух различных моделей буксировки.
14. Способ по любому из пп. 1-13, в котором этап, на котором показывают с помощью компьютерной системы по меньшей мере два различных маршрута буксировки для сравнения друг с другом, содержит этап, на котором отображают по меньшей мере два различных маршрута буксировки для визуального сравнения.
15. Способ по любому из пп. 1-14, в котором этап, на котором контролируют по меньшей мере одно заданное положение по меньшей мере одного препятствия с помощью компьютерной системы, содержит этап, на котором контролируют множество из по меньшей мере одного заданного положения по меньшей мере одного препятствия с течением времени.
16. Способ по п. 15, дополнительно содержащий этап, на котором для каждой из по меньшей мере двух моделей сравнивают по меньшей мере два последующих положения по меньшей мере одного препятствия с течением времени с заданными положениями по меньшей мере одного препятствия с течением времени.
17. Способ по п. 16, дополнительно содержащий этапы, на которых:
количественно измеряют точность каждой из по меньшей мере двух различных моделей буксировки на основе сравнения; и
показывают количественно измеренную точность.
18. Способ по любому из пп. 1-17, в котором этап, на котором моделируют с помощью компьютерной системы по меньшей мере два различных маршрута буксировки по меньшей мере одного препятствия с течением времени относительно целевого морского сооружения, содержит этап, на котором предсказывают с помощью компьютерной системы по меньшей мере одну угрозу целевому морскому сооружению по меньшей мере от по меньшей мере одного из по меньшей мере двух различных маршрутов буксировки по меньшей мере одного препятствия.
19. Способ по п. 18, дополнительно содержащий этап, на котором с помощью компьютерной системы планируют операцию буксировки в качестве реакции на по меньшей мере одну предсказанную угрозу.
20. Способ по п. 18 или 19, в котором этап, на котором предсказывают с помощью компьютерной системы по меньшей мере одну угрозу целевому морскому сооружению по меньшей мере от одного препятствия, содержит этапы, на которых:
определяют атрибут по меньшей мере одного препятствия угрозы; и
сравнивают определенный атрибут с ограничением целевого морского сооружения.
21. Способ по п. 20, в котором атрибут выбирается из группы, состоящей из размера, расстояния, скорости, формы, глубины, курса, уровня угрозы, интервала времени для перемещения и интервала времени для разбивания.
22. Способ по п. 20 или 21, в котором ограничение целевого морского сооружения содержит одно или несколько из:
пороговой величины удара, который может выдержать целевое морское сооружение по меньшей мере от одного препятствия, интервала времени, необходимого для прекращения заданной работы, проводимой целевым морским сооружением; и
интервала времени, необходимого для увода целевого морского сооружения от угрозы по меньшей мере от одного препятствия.
23. Способ по одному из пп. 1-22, дополнительно содержащий инициирование с помощью компьютерной системы на основе сравнения, операции буксировки для активного отклонения по меньшей мере одного препятствия.
24. Программируемое управляющее устройство с сохраненными на нем программными командами для побуждения программируемого управляющего устройства выполнить способ контроля морских угроз для целевого морского сооружения по любому из пп. 1-23.
25. Система моделирования морских угроз для целевого морского сооружения, проводящего заданную работу в водном пространстве, содержащая:
запоминающее устройство, хранящее информацию об одном или нескольких препятствиях в окрестности целевого морского сооружения и хранящее по меньшей мере две модели для вычисления перемещения; и
технологическое оборудование, функционально соединенное с запоминающим устройством и конфигурируемое для выполнения способа контроля морских угроз для целевого морского сооружения по любому из пп. 1-23.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Aleksey Marchenko, Kenneth Eik: "Iceberg towing in open water: Mathematical modeling and analysis of model tests", Cold Regions Science and Technology 73 (2012) 12-31, Accepted 22 November 2011, pages 12-31, ISSN 0165-232X | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

