Изобретение относится к авиационной технике, предназначено для предотвращения продольного выкатывания воздушных судов (ВС) в условиях посадки на скользкую взлетно-посадочную полосу (ВПП) и может быть использовано в современных самолетах и дистанционно пилотируемых беспилотных летательных аппаратах (ЛА).
Известен способ предотвращения выкатывания ВС за пределы ВПП [1], заключающийся в определении местоположения ВС на ВПП после посадки, определении потребной для остановки ВС дистанции, определении фактической дистанции до торца ВПП и сравнении ее с потребной для остановки дистанцией, выработки предупредительного светового или звукового сигнала в случае, если потребная для остановки дистанция превышает фактическое расстояние до торца полосы.
Недостатком известного способа является его недостаточная информативность, обусловленная тем, что не проводится предварительная оценка возможности посадки ВС на скользкую ВПП и информирование экипажа о возможности (невозможности) посадки с учетом имеющейся на борту информации (в том числе поступающей от внешних источников), а также точность, т.к. реальная потребная для остановки ВС дистанция определяется без учета реального коэффициента сцепления пневматиков колес шасси ВС с ВПП и его изменения в процессе движения ВС по ВПП. Кроме того, после определения реальной потребной для остановки ВС дистанции и ее превышения фактической дистанции до торца ВПП не формируется рекомендация экипажу о прекращении процесса посадки с учетом положения ВС на ВПП и реального коэффициента сцепления.
Известно устройство для осуществления способа предотвращения выкатывания ВС за пределы ВПП [1], содержащее систему определения местоположения ВС, выполненную в виде навигационной системы в комбинации с приемником спутниковой навигационной системы; систему сигнализации; базу данных, содержащую информацию относительно ВПП и связанных с ней процедур; ЭВМ в совокупности с блоком вычисления текущего отрицательного ускорения и потребной для остановки дистанции для текущих значений скорости и ускорения, соединенный на входе с блоком связи с бортовым оборудованием; блок управления механизмом блокировки рычага управления реверсом тяги и блоком связи с автоматом управления тягой; блок расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией, соединенный с блоком вычисления текущего отрицательного ускорения и потребной для остановки дистанции. Выход базы данных при этом соединен со входом блока расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией; выход системы определения местоположения ВС соединен со входами блока вычисления текущего отрицательного ускорения и потребной для остановки дистанции и блока расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией, а выход блока расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией соединен со входами системы сигнализации, блока управления механизмом блокировки рычага управления реверсом тяги и блока связи с автоматом управления тягой, при этом упомянутая система сигнализации выполнена с возможностью обеспечения выработки предупредительного светового или звукового сигнала в случае, если потребная для остановки дистанция, вычисленная упомянутым блоком вычисления текущего отрицательного ускорения и потребной для остановки дистанции, превышает фактическое расстояние до торца полосы, причем упомянутый блок расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией выполнен с возможностью подачи сигнала на блок управления механизмом блокировки рычага управления реверсом тяги двигателей вплоть до полной остановки ВС.
Недостатком известного устройства является низкая точность определения потребной для остановки ВС дистанции, обусловленная низкой точностью определения величины сцепления (трения) пневматиков колес шасси ВС с ВПП.
Технической задачей изобретения является расширение функциональных возможностей способа и устройства за счет информирования экипажа о невозможности посадки, о целесообразности прекращения посадки на скользкую ВПП, продолжении посадки с учетом величины реального коэффициента сцепления пневматиков колес шасси ВС с ВПП.
Решение технической задачи изобретения достигается тем, что в способе предотвращения продольного выкатывания ВС за пределы ВПП, заключающемся в определении местоположения ВС на ВПП после посадки, определении потребной для остановки ВС дистанции, определении фактической дистанции до торца ВПП и сравнении ее с потребной для остановки дистанцией, выработки предупредительного светового или звукового сигнала в случае, если потребная для остановки дистанция превышает фактическое расстояние до торца полосы, дополнительно до момента посадки на основе имеющейся на борту информации определяют прогнозное значение фактической дистанции от центра зоны посадки до торца ВПП и сравнивают ее с потребной дистанцией для остановки ВС, уходят на второй круг или на запасной аэродром, если потребная для остановки ВС дистанция больше фактической, продолжают посадку если потребная для остановки дистанция меньше фактического расстояния до торца полосы, после приземления определяют координаты ВС на ВПП, измеряют скорости ведомого и ведущего колес шасси ВС, определяют величину относительного скольжения колес, определяют среднюю величину давления в пневматиках колес шасси, определяют фактическую величину коэффициента сцепления колес шасси ВС с ВПП, уточняют величину потребной дистанции до остановки ВС на ВПП и сравнивают ее с фактической, при превышении величиной потребной дистанции величины фактической дистанции формируют рекомендации экипажу по сокращению величины потребной для остановки ВС дистанции или прекращению посадки.
Заявляемый способ реализуется в устройстве предотвращения выкатывания ВС за пределы ВПП, содержащем систему определения местоположения ВС, выполненную в виде навигационной системы в комбинации с приемником спутниковой навигационной системы; систему сигнализации; базу данных, содержащую информацию относительно ВПП и связанных с ней процедур; ЭВМ, содержащую блок вычисления потребной для остановки дистанции и блок расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией, соединенный с блоком вычисления потребной для остановки дистанции; блок связи с бортовым оборудованием; блок управления механизмом блокировки рычага управления реверсом тяги; блок связи с автоматом управления тягой. Выход базы данных соединен со входом блока расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией. Выход системы определения местоположения ВС соединен со входом блока вычисления потребной для остановки дистанции и входом блока расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией. Выход блока расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией соединен со входами системы сигнализации, блока управления механизмом блокировки рычага управления реверсом тяги и блока связи с автоматом управления тягой, при этом упомянутая система сигнализации выполнена с возможностью обеспечения выработки предупредительного светового или звукового сигнала в случае, если потребная для остановки дистанция, вычисленная упомянутым блоком вычисления потребной для остановки дистанции, превышает фактическое расстояние до торца полосы, причем упомянутый блок расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией выполнен с возможностью подачи сигнала на блок управления механизмом блокировки рычага управления реверсом тяги двигателей вплоть до полной остановки ВС. Выход блока связи с бортовым оборудованием соединен с первым входом блока вычисления потребной для остановки дистанции, блоком определения скоростей ведомого и ведущего колес шасси ВС, блоком определения величин давления в пневматиках колес шасси. В ЭВМ введен блок определения величины коэффициента сцепления колес шасси ВС с ВПП, причем выход блока связи с бортовым оборудованием дополнительно соединен со входом блока определения величин давления в пневматиках колес шасси. Выход блока определения скоростей ведомого и ведущего колес шасси ВС соединен со входом блока определения величины коэффициента сцепления колес шасси ВС с ВПП. Выход блока определения величин давления в пневматиках колес шасси соединен со входом блока определения величины коэффициента сцепления колес шасси ВС с ВПП. Выход блока определения величины коэффициента сцепления колес шасси ВС с ВПП соединен со входом блока расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией.
Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий:
1. До момента посадки на основе имеющейся на борту информации определяют прогнозное значение фактической дистанции от центра зоны посадки до торца ВПП и сравнивают ее с потребной дистанцией для остановки ВС.
2. Уходят на второй круг или на запасной аэродром, если потребная для остановки ВС дистанция больше фактической.
3. Продолжают посадку если потребная для остановки дистанция меньше фактического расстояния до торца полосы.
4. После приземления определяют координаты ВС на ВПП, измеряют скорости ведомого и ведущего колес шасси ВС, определяют величину относительного скольжения колес.
5. Определяют среднюю величину давления в пневматиках колес шасси.
6. Определяют фактическую величину коэффициента сцепления колес шасси ВС с ВПП.
7. Уточняют величину потребной дистанции до остановки ВС на ВПП и сравнивают ее с фактической, при превышении величиной потребной дистанции величины фактической дистанции формируют рекомендации экипажу по сокращению величины потребной дистанции или прекращению посадки.
Отличительными для устройства являются следующие признаки:
- введен блок определения скоростей ведомого и ведущего колес шасси ВС;
- введен блок определения величин давления в пневматиках колес шасси;
- в ЭВМ введен блок определения величины коэффициента сцепления колес шасси ВС с ВПП;
- связи между известными и новыми элементами устройства, то есть новая схема устройства.
Блок определения скоростей ведомого и ведущего колес шасси ВС известен [2].
Блок определения величин давления в пневматиках колес шасси известен [3].
Вышеуказанные отличительные признаки являются существенными, поскольку каждый в отдельности и все совместно направлены на решение поставленной задачи с достижением технического результата. Использование единой совокупности существенных отличительных признаков в известных решениях не обнаружено, что характеризует соответствие технического решения критерию «новизна».
Единая совокупность новых существенных признаков с общими известными обеспечивает решение поставленной задачи с достижением технического результата и характеризует предложенное техническое решение существенными отличиями по сравнению с известным уровнем техники.
Заявляемые способ и устройство являются результатом научно-исследовательской и экспериментальной работы.
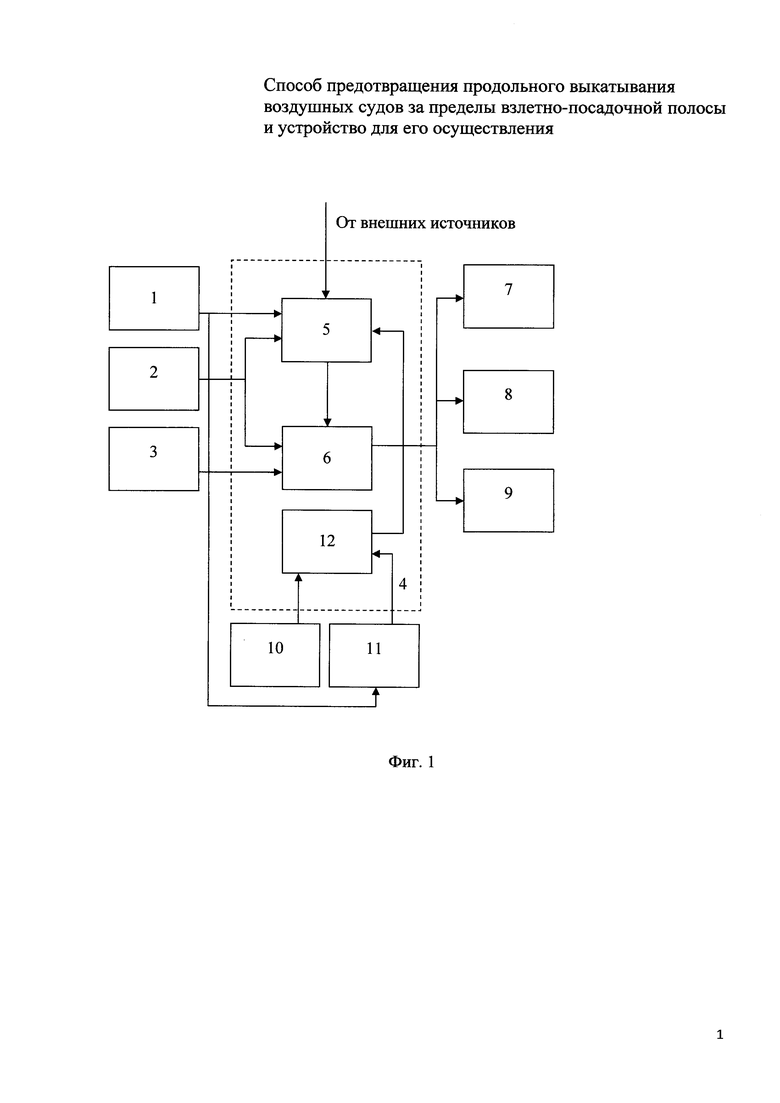
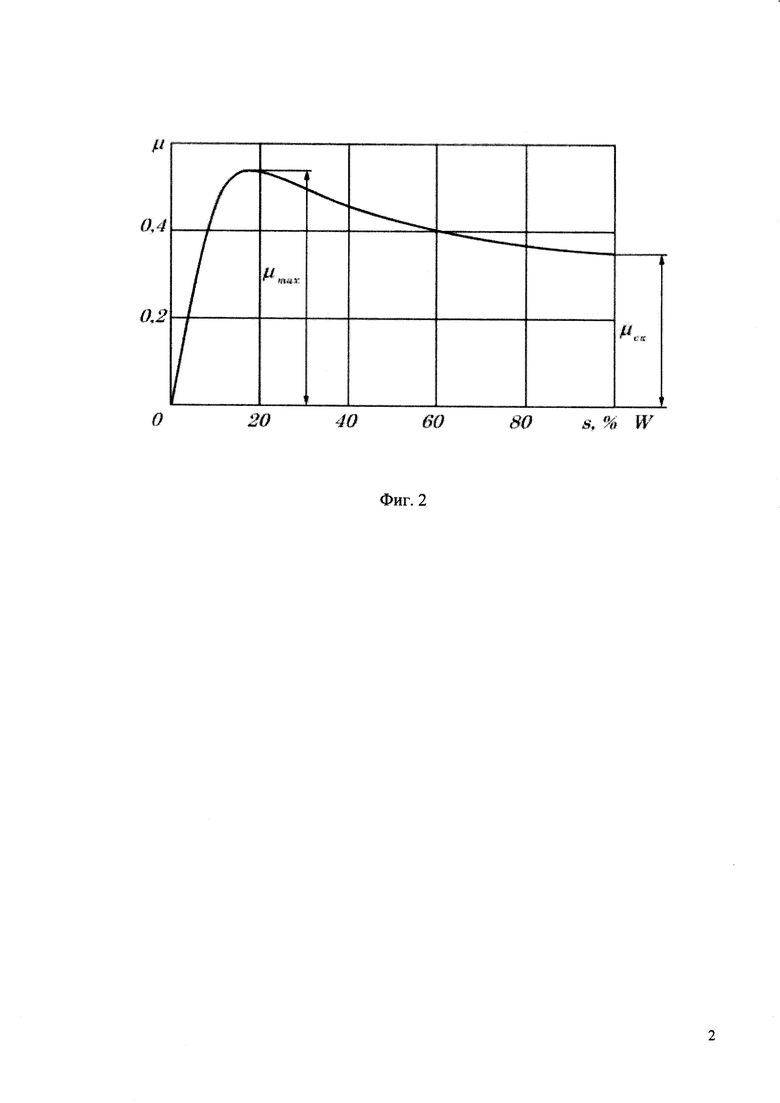
На фиг. 1 приведена функциональная схема устройства предотвращения продольного выкатывания ВС за пределы ВПП.
Устройство предотвращения продольного выкатывания ВС за пределы ВПП содержит систему 2 определения местоположения ВС, выполненную в виде навигационной системы в комбинации с приемником спутниковой навигационной системы, систему 9 сигнализации, базу 3 данных, содержащую информацию относительно ВПП и связанных с ней процедур, ЭВМ 4, содержащую блок 5 вычисления потребной для остановки дистанции и блок 6 расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией, соединенный с блоком 5 вычисления потребной для остановки дистанции, блок 1 связи с бортовым оборудованием, блок 7 управления механизмом блокировки рычага управления реверсом тяги, блок 8 связи с автоматом управления тягой. Выход базы 3 данных соединен со входом блока 6 расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией; выход системы 2 определения местоположения ВС соединен со входом блока 5 вычисления потребной для остановки дистанции и входом блока 6 расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией; выход блока 6 расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией соединен со входами системы 9 сигнализации, блока 7 управления механизмом блокировки рычага управления реверсом тяги и блока 8 связи с автоматом управления тягой. Упомянутая система 9 сигнализации выполнена с возможностью обеспечения выработки предупредительного светового или звукового сигнала в случае, если потребная для остановки дистанция, вычисленная упомянутым блоком 5 вычисления потребной для остановки дистанции, превышает фактическое расстояние до торца полосы, причем упомянутый блок 6 расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией выполнен с возможностью подачи сигнала на блок 7 управления механизмом блокировки рычага управления реверсом тяги двигателей вплоть до полной остановки ВС. Выход блока 1 связи с бортовым оборудованием соединен со входом блока 5 вычисления потребной для остановки дистанции. Дополнительно введены блок 10 определения скоростей ведомого и ведущего колес шасси ВС, блок 11 определения величин давления в пневматиках колес шасси, в ЭВМ введен блок 12 определения величины коэффициента сцепления колес шасси ВС с ВПП, причем выход блока 1 связи с бортовым оборудованием дополнительно соединен со входом блока 11 определения величин давления в пневматиках колес шасси. Выход блока 10 определения скоростей ведомого и ведущего колес шасси ВС соединен со входом блока 12 определения величины коэффициента сцепления колес шасси ВС с ВПП; выход блока 11 определения величин давления в пневматиках колес шасси соединен со входом блока 12 определения величины коэффициента сцепления колес шасси ВС с ВПП; выход блока 12 определения величины коэффициента сцепления колес шасси ВС с ВПП соединен со входом блока 5 вычисления потребной для остановки дистанции.
Способ предотвращения продольного выкатывания ВС за пределы ВПП реализуется следующим образом.
При заходе на посадку экипаж ВС устанавливает связь с обеспечивающим персоналом аэропорта, который передает на борт последнюю информацию о погодных условиях в районе аэропорта и состоянии ВПП. На основании этой информации и имеющихся в ЭВМ ВС данных предварительных расчетов экипаж определяет прогнозное значение фактической дистанции от центра зоны посадки ВС до торца ВПП и сравнивает ее с потребной дистанцией для остановки ВС. Если окажется, что для данных погодных условий величина потребной для остановки ВС дистанции больше фактической, то система формирует экипажу рекомендацию ухода на второй круг или на запасной аэродром. Если такой рекомендации нет, то посадка продолжается.
После посадки ВС в блок 5 вычисления потребной для остановки дистанции поступает сигнал обжатия шасси от блока 1 связи с бортовым оборудованием и информация о текущих географических координатах и скорости ВС от системы 2 определения местоположения ВС.
Кроме того, в блок 5 вычисления потребной для остановки дистанции поступает сигнал о величине фактического коэффициента сцепления пневматиков колес шасси ВС с ВПП с блока 12 определения величины коэффициента сцепления. Фактический коэффициент сцепления определяется в блоке 12 с учетом величины относительного скольжения колес шасси, которая вычисляется в блоке 10 определения скоростей ведомого и ведущего колес шасси ВС по зависимости [4]:
где n1 - обороты ведомого колеса;
n2 - обороты тормозящего колеса.
Зависимость коэффициента продольного сцепления от величины относительного скольжения колес шасси имеет вид, приведенный на фиг. 2.
Зависимость величины предельного (максимального) коэффициента сцепления от скорости ВС и давления в пневматиках имеет вид [4]:

где 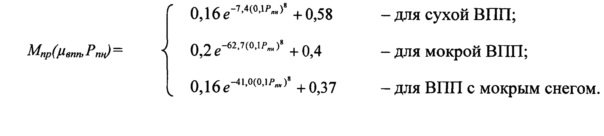
Значения других коэффициентов формулы (1) представлены в таблице 1.
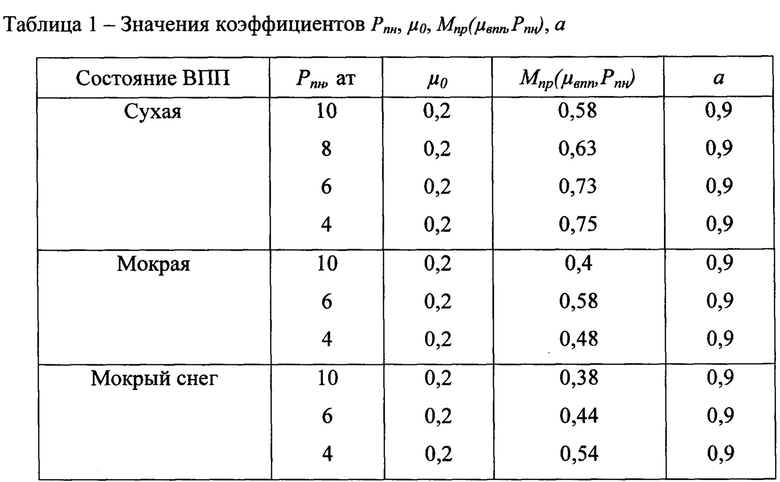
Сигнал о величине реального давления в пневматиках шасси ВС поступает на второй вход блока 12 определения коэффициента сцепления с выхода блока 11 определения средней величины давления в пневматиках колес шасси. В блоке 5 вычисления потребной для остановки дистанции в режиме реального времени рассчитывается потребная для полной остановки ВС дистанция. Полученные в процессе вычисления данные поступают в блок 6 расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией, в который также поступают данные из базы 3 данных, по которым производится идентификация ВПП, рассчитывается фактическая дистанция до противоположного торца ВПП, а также сравниваются значения фактического расстояния до торца полосы и потребной для остановки ВС дистанции. В том случае, когда потребная для остановки дистанция превышает фактическое расстояние до торца полосы, и имеется возможность прекращения посадки экипажу, выдается рекомендация «Посадку прекратить». Если посадку прекратить нельзя, устройство выдает предупреждающую сигнализацию экипажу через систему 9 сигнализации, выполненную с возможностью обеспечения выработки предупредительного светового или звукового сигнала, например, аудиокоманды «Режим реверса не уменьшать» или «Реверс застопорен!», а также параллельно подает сигнал на блок 7 управления механизмом блокировки рычага управления реверсом тяги и блок 8 связи с автоматом управления тягой с целью недопущения уменьшения режима обратной тяги двигателей вплоть до полной остановки ВС.
Использование предложенных способа и устройства позволит повысить безопасность полетов за счет предотвращения продольного выкатывания ВС за пределы ВПП.
Источники информации
1. Патент РФ на изобретение №2373115, кл. B64D 45/00 (2006.01), 20.11.2009 г., (прототип).
2. Мужичек С.М., Ефанов В.В., Ефимов А.В., Гриненко Л.Г. Патент РФ на изобретение №2549601, кл. G01M 17/02, G01S 13/88, B64C 25/26, 27.04.2015 г.
3. Мужичек СМ., Ефанов В.В., Ефимов А.В. Патент РФ на изобретение №2502058, кл. G01M 17/00, 20.12.2013 г.
4. Кубланов М.С. Математическое моделирование задач летной эксплуатации воздушных судов на взлете и посадке. - М., МГТУ ГА, 2013.
Изобретение относится к авиационной технике, предназначено для предотвращения продольного выкатывания воздушных судов (ВС) в условиях посадки на скользкую взлетно-посадочную полосу (ВПП) и может быть использовано в современных самолетах и дистанционно пилотируемых беспилотных летательных аппаратах. До момента посадки на основе имеющейся на борту информации определяют прогнозное значение фактической дистанции от центра зоны посадки до торца ВПП и сравнивают ее с потребной дистанцией для остановки ВС, уходят на второй круг или на запасной аэродром, если потребная для остановки ВС дистанция больше фактической, продолжают посадку, если потребная для остановки дистанция меньше фактического расстояния до торца полосы, после приземления определяют координаты ВС на ВПП, измеряют скорости ведомого и ведущего колес шасси ВС, определяют величину относительного скольжения колес, определяют среднюю величину давления в пневматиках колес шасси, определяют фактическую величину коэффициента сцепления колес шасси ВС с ВПП, уточняют величину потребной дистанции до остановки ВС на ВПП и сравнивают ее с фактической, при превышении величиной потребной дистанции величины фактической дистанции формируют рекомендации экипажу по сокращению величины потребной для остановки ВС дистанции или прекращению посадки. Расширяются функциональные возможности способа и устройства за счет информирования экипажа о невозможности посадки, о целесообразности прекращения посадки на скользкую ВПП, продолжении посадки с учетом величины реального коэффициента сцепления пневматиков колес шасси ВС с ВПП. 2 н.п. ф-лы, 2 ил.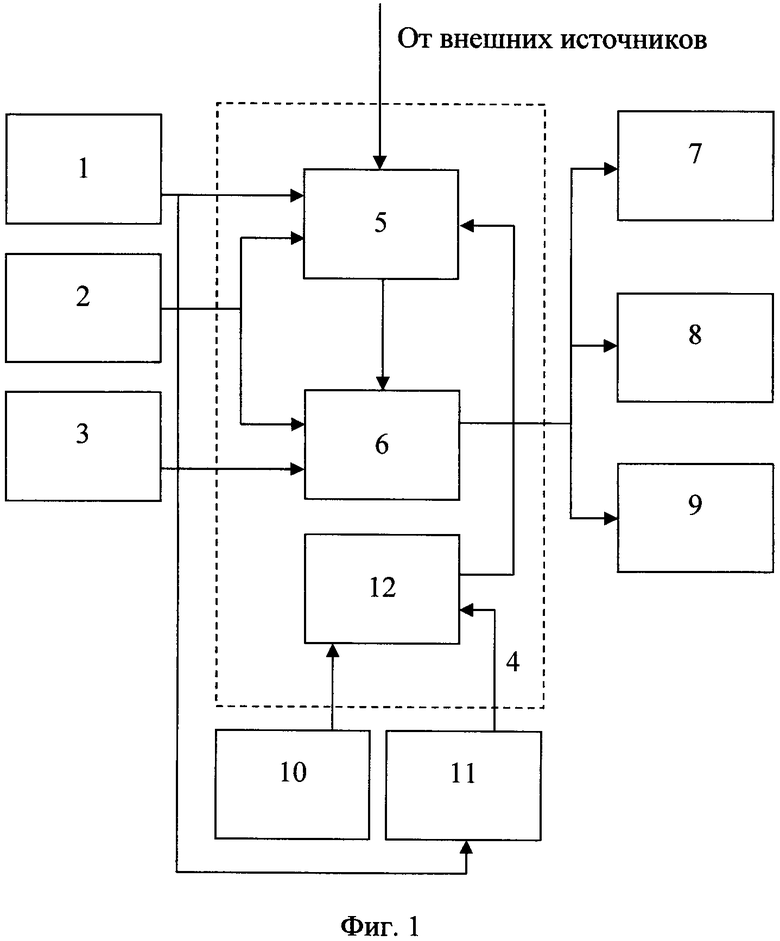
1. Способ предотвращения продольного выкатывания воздушных судов (ВС) за пределы взлетно-посадочной полосы (ВПП), заключающийся в определении местоположения ВС на ВПП после посадки, определении потребной для остановки ВС дистанции, определении фактической дистанции до торца ВПП и сравнении ее с потребной для остановки дистанцией, выработке предупредительного светового или звукового сигнала в случае, если потребная для остановки дистанция превышает фактическое расстояние до торца полосы, отличающийся тем, что до момента посадки на основе имеющейся на борту информации определяют прогнозное значение фактической дистанции от центра зоны посадки до торца ВПП и сравнивают ее с потребной дистанцией для остановки ВС; уходят на второй круг или на запасной аэродром, если потребная для остановки ВС дистанция больше фактической; продолжают посадку, если потребная для остановки дистанция меньше фактического расстояния до торца полосы; после приземления определяют координаты ВС на ВПП; измеряют скорости ведомого и ведущего колес шасси ВС; определяют величину относительного скольжения колес; определяют среднюю величину давления в пневматиках колес шасси; определяют фактическую величину коэффициента сцепления колес шасси ВС с ВПП; уточняют величину потребной дистанции до остановки ВС на ВПП и сравнивают ее с фактической; при превышении величиной потребной дистанции величины фактической дистанции формируют рекомендации экипажу по сокращению величины потребной для остановки ВС дистанции или прекращению посадки.
2. Устройство для предотвращения продольного выкатывания воздушных судов (ВС) за пределы взлетно-посадочной полосы (ВПП), содержащее систему определения местоположения ВС, выполненную в виде навигационной системы в комбинации с приемником спутниковой навигационной системы; систему сигнализации; базу данных, содержащую информацию относительно ВПП и связанных с ней процедур; ЭВМ, содержащую блок вычисления потребной для остановки дистанции и блок расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией, соединенный с блоком вычисления потребной для остановки дистанции; блок связи с бортовым оборудованием; блок управления механизмом блокировки рычага управления реверсом тяги; блок связи с автоматом управления тягой; выход базы данных соединен с входом блока расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией; выход системы определения местоположения ВС соединен с входом блока вычисления потребной для остановки дистанции и входом блока расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией; выход блока расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией соединен с входами системы сигнализации, блока управления механизмом блокировки рычага управления реверсом тяги и блока связи с автоматом управления тягой, при этом упомянутая система сигнализации выполнена с возможностью обеспечения выработки предупредительного светового или звукового сигнала в случае, если потребная для остановки дистанция, вычисленная упомянутым блоком вычисления потребной для остановки дистанции, превышает фактическое расстояние до торца полосы; упомянутый блок расчета фактической дистанции до торца ВПП и сравнения ее с потребной для остановки дистанцией выполнен с возможностью подачи сигнала на блок управления механизмом блокировки рычага управления реверсом тяги двигателей вплоть до полной остановки ВС; выход блока связи с бортовым оборудованием соединен с входом блока вычисления потребной для остановки дистанции, отличающееся тем, что дополнительно введены блок определения скоростей ведомого и ведущего колес шасси ВС, блок определения величин давления в пневматиках колес шасси, в ЭВМ введен блок определения величины коэффициента сцепления колес шасси ВС с ВПП, причем выход блока связи с бортовым оборудованием дополнительно соединен с входом блока определения величин давления в пневматиках колес шасси; выход блока определения скоростей ведомого и ведущего колес шасси ВС соединен с входом блока определения величины коэффициента сцепления колес шасси ВС с ВПП; выход блока определения величин давления в пневматиках колес шасси соединен с входом блока определения величины коэффициента сцепления колес шасси ВС с ВПП; выход блока определения величины коэффициента сцепления колес шасси ВС с ВПП соединен с входом блока вычисления потребной для остановки дистанции.
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ВЫКАТЫВАНИЯ ВОЗДУШНЫХ СУДОВ ЗА ПРЕДЕЛЫ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2008 |
|
RU2373115C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2549601C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ НАГРУЗКИ ОПОРЫ ШАССИ, ОПОРА ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ, ИСПОЛЬЗУЮЩИЕ НАЗВАННУЮ СИСТЕМУ | 2006 |
|
RU2416548C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1990 |
|
SU1797242A1 |

