Уровень техники
1. Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе автономного вождения.
2. Описание предшествующего уровня техники
[0002] В предшествующем уровне техники, патент США № 8346426 раскрывает систему автономного вождения. Описание изобретения по патенту США № 8346426 раскрывает то, что маршрут, по которому транспортное средство прибывает к месту назначения, выбирается в случае, если пассажир вводит пункт назначения, и автономное вождение транспортного средства выполняется по выбранному маршруту.
Сущность изобретения
[0003] Согласно вышеописанной системе предшествующего уровня техники, нагрузка на пассажира относительно вождения уменьшается вследствие автономного вождения. Тем не менее, пассажир должен вручную задавать пункт назначения из множества опций, чтобы инструктировать системе выполнять автономное вождение. Имеется запас для улучшения в задании пункта назначения с точки зрения удобства пассажира.
[0004] Изобретение предоставляет систему автономного вождения, обеспечивающую дополнительное повышение удобства пассажира относительно задания пункта назначения.
[0005] Система автономного вождения согласно аспекту изобретения выполнена с возможностью осуществлять автономное вождение транспортного средства. Аспект изобретения относится к системе автономного вождения, которая выполняет автономное вождение транспортного средства, включающей в себя устройство получения позиции транспортного средства, устройство получения состояний транспортного средства, устройство получения состояний пассажира, базу данных возможных вариантов пунктов назначения и электронный модуль управления. Устройство получения позиции транспортного средства выполнено с возможностью получать позицию транспортного средства на карте. Устройство получения состояний транспортного средства выполнено с возможностью получать состояние транспортного средства для транспортного средства. Устройство получения состояний пассажира выполнено с возможностью получать состояние пассажира транспортного средства. База данных возможных вариантов пунктов назначения выполнена с возможностью сохранять данные возможных вариантов пунктов назначения, включающие в себя возможный вариант пункта назначения и состояние пассажира, коррелированное с возможным вариантом пункта назначения. Электронный модуль управления выполнен с возможностью определять то, находится или нет транспортное средство в состоянии завершения посадки, на основе состояния транспортного средства и состояния пассажира, и задавать пункт назначения транспортного средства в ходе автономного вождения на основе позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения в случае, если электронный модуль управления определяет то, что транспортное средство находится в состоянии завершения посадки.
[0006] С помощью системы автономного вождения согласно аспекту изобретения, в случае если транспортное средство определяется как находящееся в состоянии завершения посадки, пункт назначения транспортного средства в ходе автономного вождения может автоматически задаваться на основе позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения, и ввиду этого ручное задание пункта назначения, выполняемое пассажиром, может опускаться. С помощью системы автономного вождения, поскольку пункт назначения на основе состояния пассажира задается с учетом взаимосвязи между состоянием пассажира и пунктом назначения, требуемым пассажиром, может повышаться точность автоматического задания пункта назначения, требуемая пассажиром, и ввиду этого может дополнительно повышаться удобство пассажира.
[0007] В системе автономного вождения согласно аспекту изобретения, данные возможных вариантов пунктов назначения могут включать в себя возможный вариант пункта назначения и состояние пассажира, а также время, коррелированное с возможным вариантом пункта назначения; и в случае, если электронный модуль управления определяет то, что транспортное средство находится в состоянии завершения посадки, электронный модуль управления может задавать пункт назначения транспортного средства в ходе автономного вождения на основе текущего времени, позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения. С помощью системы автономного вождения, пункт назначения при автономном вождении может задаваться на основе часов-пик при езде на работу и часов посещения школы дополнительно с учетом текущего времени.
[0008] Система автономного вождения согласно аспекту изобретения дополнительно может включать в себя терминальное устройство связи, выполненное с возможностью осуществлять связь с портативным информационным терминалом пассажира транспортного средства. В системе автономного вождения, электронный модуль управления может быть выполнен с возможностью получать данные расписания пассажира из портативного информационного терминала через связь с использованием терминального устройства связи, и электронный модуль управления может задавать пункт назначения транспортного средства в ходе автономного вождения на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных расписания. С помощью системы автономного вождения, данные расписания пассажира получаются из портативного информационного терминала пассажира, и ввиду этого пункт назначения при автономном вождении может задаваться на основе данных расписания пассажира.
[0009] Система автономного вождения согласно аспекту изобретения дополнительно может включать в себя сетевое устройство связи, выполненное с возможностью осуществлять связь с информационной сетью, и устройство персональной аутентификации, выполненное с возможностью выполнять персональную аутентификацию пассажира транспортного средства. В системе автономного вождения, электронный модуль управления может быть выполнен с возможностью получать данные расписания пассажира, прошедшего персональную аутентификацию посредством устройства персональной аутентификации через связь с использованием сетевого устройства связи, и электронный модуль управления может задавать пункт назначения транспортного средства в ходе автономного вождения на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных расписания. С помощью системы автономного вождения, данные расписания пассажира, прошедшего персональную аутентификацию, получаются из информационной сети, и ввиду этого пункт назначения при автономном вождении может задаваться на основе данных расписания пассажира.
[0010] В системе автономного вождения согласно аспекту изобретения, в случае если получаются данные расписания множества пассажиров, электронный модуль управления может задавать пункт назначения транспортного средства в ходе автономного вождения на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных приоритезации, заданных заранее. С помощью системы автономного вождения, в случае если получаются элементы данных расписания множества пассажиров, запланированные пункты назначения в элементах данных расписания пассажиров могут быть надлежащим образом приоритезированы, и пункт назначения при автономном вождении может задаваться на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных приоритезации, заданных заранее.
[0011] Система автономного вождения согласно аспекту изобретения дополнительно может включать в себя устройство представления, выполненное с возможностью представлять информацию пассажиру, и устройство ввода, выполненное с возможностью принимать операцию разрешения пассажира. Электронный модуль управления может быть выполнен с возможностью инструктировать устройству представления представлять по меньшей мере один из возможных вариантов пунктов назначения пассажиру на основе позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения, в случае если электронный модуль управления определяет то, что транспортное средство находится в состоянии завершения посадки.
Электронный модуль управления может быть выполнен с возможностью определять то, разрешается или нет возможный вариант пункта назначения пассажиром, на основе ввода из устройства ввода. Электронный модуль управления может быть выполнен с возможностью задавать возможный вариант пункта назначения в качестве пункта назначения транспортного средства в ходе автономного вождения в случае, если электронный модуль управления определяет то, что возможный вариант пункта назначения разрешается пассажиром.
[0012] С помощью системы автономного вождения согласно аспекту изобретения, в случае если транспортное средство определяется как находящееся в состоянии завершения посадки, по меньшей мере один возможный вариант пункта назначения может представляться пассажиру, и возможный вариант пункта назначения, разрешенный пассажиром, может задаваться в качестве пункта назначения при автономном вождении, на основе позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения. С помощью системы автономного вождения, поскольку возможный вариант пункта назначения на основе состояния пассажира может представляться с учетом взаимосвязи между состоянием пассажира и пунктом назначения при автономном вождении транспортного средства, может повышаться точность представления возможного варианта пункта назначения, требуемая пассажиром, и ввиду этого может дополнительно повышаться удобство пассажира относительно задания пункта назначения.
[0013] В системе автономного вождения согласно аспекту изобретения, данные возможных вариантов пунктов назначения могут включать в себя возможный вариант пункта назначения и состояние пассажира, а также время, коррелированное с возможным вариантом пункта назначения. В случае если электронный модуль управления определяет то, что транспортное средство находится в состоянии завершения посадки, электронный модуль управления может представлять возможный вариант пункта назначения пассажиру на основе текущего времени, позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения. С помощью системы автономного вождения, возможный вариант пункта назначения при автономном вождении может представляться на основе часов-пик при езде на работу и часов посещения школы дополнительно с учетом текущего времени при автоматическом задании пункта назначения.
[0014] Система автономного вождения согласно аспекту изобретения дополнительно может включать в себя терминальное устройство связи, выполненное с возможностью осуществлять связь с портативным информационным терминалом пассажира транспортного средства. Электронный модуль управления может быть выполнен с возможностью получать данные расписания пассажира из портативного информационного терминала через связь с использованием терминального устройства связи. Данные расписания могут включать в себя запланированный пункт назначения, коррелированный с запланированным временем, и электронный модуль управления может быть выполнен с возможностью представлять по меньшей мере одно из возможного варианта пункта назначения и запланированного пункта назначения пассажиру на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных расписания. С помощью системы автономного вождения, данные расписания пассажира получаются из портативного информационного терминала пассажира, и ввиду этого возможный вариант пункта назначения при автономном вождении может представляться на основе данных расписания пассажира.
[0015] Система автономного вождения согласно аспекту изобретения дополнительно может включать в себя сетевое устройство связи, выполненное с возможностью осуществлять связь с информационной сетью; и устройство персональной аутентификации, выполненное с возможностью выполнять персональную аутентификацию пассажира транспортного средства. Электронный модуль управления может быть выполнен с возможностью получать данные расписания пассажира, прошедшего персональную аутентификацию посредством устройства персональной аутентификации через связь с использованием сетевого устройства связи, и данные расписания могут включать в себя запланированный пункт назначения, коррелированный с запланированным временем. Электронный модуль управления может быть выполнен с возможностью представлять по меньшей мере одно из возможного варианта пункта назначения и запланированного пункта назначения пассажиру на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных расписания. С помощью системы автономного вождения, данные расписания пассажира получаются из информационной сети, и ввиду этого пункт назначения при автономном вождении может задаваться на основе данных расписания пассажира.
[0016] В системе автономного вождения согласно аспекту изобретения, в случае если получаются данные расписания множества пассажиров, электронный модуль управления может быть выполнен с возможностью представлять по меньшей мере одно из возможного варианта пункта назначения и запланированного пункта назначения пассажиру на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных приоритезации, заданных заранее. С помощью системы автономного вождения, в случае если получаются элементы данных расписания множества пассажиров, запланированные пункты назначения в элементах данных расписания пассажиров могут быть надлежащим образом приоритезированы, и возможный вариант пункта назначения при автономном вождении может представляться на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных приоритезации, заданных заранее.
[0017] В системе автономного вождения согласно аспекту изобретения, электронный модуль управления может быть выполнен с возможностью определять то, разрешает или нет пассажир сохранение пункта назначения в базе данных возможных вариантов пунктов назначения. В случае если электронный модуль управления определяет то, что пассажир разрешает сохранение пункта назначения в базе данных возможных вариантов пунктов назначения, электронный модуль управления может быть выполнен с возможностью сохранять пункт назначения в базе данных возможных вариантов пунктов назначения в качестве возможного варианта пункта назначения в корреляции с состоянием пассажира. В случае если электронный модуль управления определяет то, что пассажир не разрешает сохранение пункта назначения в базе данных возможных вариантов пунктов назначения, электронный модуль управления может не сохранять пункт назначения в базе данных возможных вариантов пунктов назначения. С помощью системы автономного вождения, поскольку пункт назначения, разрешенный пассажиром, сохраняется в базе данных возможных вариантов пунктов назначения в качестве возможного варианта пункта назначения в корреляции с состоянием пассажира, можно не допускать включения несоответствующего возможного варианта пункта назначения в данные возможных вариантов пунктов назначения.
[0018] Система автономного вождения согласно аспекту изобретения дополнительно может включать в себя базу данных расписаний транспортного средства, выполненную с возможностью сохранять данные расписаний транспортного средства, коррелированные транспортным средством. Электронный модуль управления может быть выполнен с возможностью выдавать запрос на персональную аутентификацию пассажиру в случае, если двигатель транспортного средства, который не запланирован в данных расписаний транспортного средства, запускается. С помощью системы автономного вождения, в случае если двигатель транспортного средства, который не запланирован в данных расписаний транспортного средства, запускается, имеется очень высокая вероятность того, что может управляться ненадлежащее транспортное средство, и ввиду этого дополнительно может обеспечиваться содействие в повышении безопасности транспортного средства посредством выполнения запроса на предмет персональной аутентификации.
[0019] В системе автономного вождения согласно аспекту изобретения, в случае если электронный модуль управления определяет то, что транспортное средство находится в состоянии завершения посадки в ходе остановки двигателя транспортного средства, электронный модуль управления может быть выполнен с возможностью определять то, удовлетворяется или нет предварительно установленное условие запуска двигателя, на основе состояния транспортного средства. В случае если электронный модуль управления определяет то, что условие запуска двигателя удовлетворяется, электронный модуль управления может быть выполнен с возможностью запускать двигатель транспортного средства. С помощью системы автономного вождения, в случае если транспортное средство переводится в состояние завершения посадки в ходе остановки двигателя транспортного средства, и условие запуска двигателя определяется как удовлетворяемое, двигатель транспортного средства автоматически запускается, и ввиду этого может значительно повышаться удобство относительно запуска двигателя пассажира.
[0020] Как описано выше, согласно аспекту изобретения, может дополнительно повышаться удобство пассажира относительно задания пункта назначения.
Краткое описание чертежей
[0021] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является блок-схемой, иллюстрирующей систему автономного вождения согласно первому варианту осуществления;
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процесс задания пунктов назначения согласно первому варианту осуществления;
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей процесс запуска двигателя согласно первому варианту осуществления;
Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей процесс сохранения возможных вариантов пунктов назначения согласно первому варианту осуществления;
Фиг. 5 является блок-схемой, иллюстрирующей систему автономного вождения согласно второму варианту осуществления;
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей процесс задания пунктов назначения согласно второму варианту осуществления;
Фиг. 7 является блок-схемой, иллюстрирующей систему автономного вождения согласно третьему варианту осуществления;
Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей процесс выдачи запросов на персональную аутентификацию согласно третьему варианту осуществления;
Фиг. 9 является блок-схемой, иллюстрирующей систему автономного вождения согласно четвертому варианту осуществления;
Фиг. 10A является блок-схемой последовательности операций способа, иллюстрирующей процесс представления возможных вариантов пунктов назначения согласно четвертому варианту осуществления;
Фиг. 10B является блок-схемой последовательности операций способа, иллюстрирующей процесс задания пунктов назначения согласно четвертому варианту осуществления;
Фиг. 11 является блок-схемой, иллюстрирующей систему автономного вождения согласно пятому варианту осуществления; и
Фиг. 12 является блок-схемой последовательности операций способа, иллюстрирующей процесс представления возможных вариантов пунктов назначения согласно пятому варианту осуществления.
Подробное описание вариантов осуществления
[0022] Далее описывается один вариант осуществления изобретения со ссылкой на чертежи.
Первый вариант осуществления
[0023] Фиг. 1 является блок-схемой, иллюстрирующей систему автономного вождения согласно первому варианту осуществления. Система 100 автономного вождения согласно первому варианту осуществления, проиллюстрированная на фиг. 1, монтируется на транспортном средстве, таком как автомобиль, и выполняет автономное вождение транспортного средства. Система 100 автономного вождения начинает автономное вождение транспортного средства в случае, если пассажир выполняет операцию (например, операцию нажатия кнопки начала автономного вождения) начала автономного вождения.
[0024] Автономное вождение указывает управление транспортным средством для автономного обеспечения принудительного движения транспортного средства к пункту назначения, заданному заранее. При автономном вождении, водитель не должен выполнять операцию вождения, и транспортное средство автономно движется. Ниже описываются подробности задания пункта назначения.
Конфигурация системы автономного вождения согласно первому варианту осуществления
[0025] Как проиллюстрировано на фиг. 1, система 100 автономного вождения включает в себя электронный модуль 10 управления (ECU), который полностью управляет системой. ECU 10 представляет собой электронный модуль управления, включающий в себя центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), схему связи на основе контроллерной сети (CAN) и т.п. В ECU 10, например, программа, сохраненная в ROM, загружается в RAM, и CPU выполняет программу, загруженную в RAM, с тем чтобы реализовывать различные функции. ECU 10 может формироваться из множества электронных модулей.
[0026] ECU 10 соединяется с приемным GPS-модулем 1, внешним датчиком 2, внутренним датчиком 3, модулем 4 обнаружения состояний пассажира, картографической базой 5 данных, базой 6 данных возможных вариантов пунктов назначения, человеко-машинным интерфейсом 7 (HMI) и исполнительным устройством 8.
[0027] Приемный GPS-модуль 1 принимает сигналы из трех или более GPS-спутников, с тем чтобы измерять позицию транспортного средства (например, широту и долготу транспортного средства). Приемный GPS-модуль 1 передает измеренную информацию позиции транспортного средства в ECU 10.
[0028] Внешний датчик 2 представляет собой датчик, обнаруживающий внешнюю обстановку и т.п. вокруг транспортного средства. Внешний датчик 2 включает в себя по меньшей мере одно из камеры и радарного датчика.
[0029] Камера представляет собой устройство формирования изображений, которое формирует изображение внешней обстановки транспортного средства. Камера предоставляется на задней стороне ветрового стекла транспортного средства. Камера передает информацию обработки изображений относительно внешней обстановки транспортного средства в ECU 10. Камера может представлять собой монокулярную камеру или стереокамеру. Стереокамера имеет два модуля формирования изображений, предоставленные с возможностью воспроизводить бинокулярный параллакс. Информация обработки изображений в стереокамере включает в себя информацию относительно направления глубины.
[0030] Радарный датчик представляет собой устройство обнаружения, которое обнаруживает помехи вокруг транспортного средства посредством использования электрических волн (например, миллиметровых волн). Радарный датчик включает в себя, например, радар миллиметрового диапазона или устройство на основе оптического обнаружения и дальнометрии (лидар). Радарный датчик передает электрические волны или свет вокруг транспортного средства и принимает электрические волны, отражаемые посредством помех, чтобы обнаруживать помехи. Радарный датчик передает обнаруженную информацию помех в ECU 10. Примеры помех включают в себя неподвижные помехи, к примеру, дорожные ограждения и здания, и подвижные помехи, к примеру, пешеходов, велосипеды и другие транспортные средства.
[0031] Внутренний датчик 3 представляет собой устройство обнаружения, которое обнаруживает состояние движения и состояние транспортного средства для транспортного средства. Внутренний датчик 3 включает в себя датчик скорости транспортного средства, датчик ускорения и датчик скорости относительно вертикальной оси. Датчик скорости транспортного средства представляет собой датчик, который определяет скорость транспортного средства. В качестве датчика скорости транспортного средства, используется датчик скорости вращения колес, который предоставляется в колесе транспортного средства, ведущий вал, вращающийся как единое целое с колесом и т.п. и определяет частоту вращения колеса. Датчик скорости транспортного средства передает определенную информацию скорости транспортного средства (информацию скорости вращения колес) в ECU 10.
[0032] Датчик ускорения представляет собой датчик, который определяет ускорение транспортного средства. Датчик ускорения включает в себя датчик ускорения в направлении спереди назад, который определяет ускорение транспортного средства в направлении спереди назад, и датчик поперечного ускорения, который определяет поперечное ускорение транспортного средства. Датчик ускорения передает, например, информацию ускорения транспортного средства в ECU 10. Датчик скорости относительно вертикальной оси представляет собой датчик, который определяет скорость относительно вертикальной оси (угловую скорость вращения) центра тяжести транспортного средства вокруг вертикальной оси. В качестве датчика скорости относительно вертикальной оси, например, может использоваться гиродатчик. Датчик скорости относительно вертикальной оси передает определенную информацию скорости относительно вертикальной оси транспортного средства в ECU 10. Внутренний датчик 3 включает в себя датчик открытия двери, который обнаруживает открытие и закрытие двери транспортного средства в качестве состояния транспортного средства.
[0033] Модуль 4 обнаружения состояний пассажира представляет собой датчик, который обнаруживает состояние пассажира транспортного средства. Модуль 4 обнаружения состояний пассажира включает в себя бортовую камеру и датчик давления на сиденье. Бортовая камера представляет собой камеру, которая предоставляется таким образом, что она направлена к салону транспортного средства для транспортного средства, и формирует изображение салона транспортного средства. Может быть предусмотрено несколько бортовых камер. Бортовая камера может включать в себя камеру монитора состояния водителя. Бортовая камера может включать в себя камеру для съемки в инфракрасном диапазоне. Датчик давления на сиденье представляет собой датчик, который предоставляется в каждом сиденье транспортного средства и определяет давление, приложенное к сиденью транспортного средства вследствие того, что пассажир сидит на сиденье. Модуль 4 обнаружения состояний пассажира может включать в себя датчик ремня безопасности, который обнаруживает состояние надевания ремня безопасности пассажира. Модуль 4 обнаружения состояний пассажира может включать в себя датчик рулевого управления, который обнаруживает состояние руля, захватываемого водителем.
[0034] Состояние пассажира представляет собой состояние пассажира транспортного средства (человека, едущего в транспортном средстве). Состояние пассажира включает в себя число пассажиров. Состояние пассажира включает в себя позицию сидения (позицию сидения, к примеру, водительского сиденья, пассажирского сиденья или заднего сиденья) пассажира. Состояние пассажира может включать в себя пол пассажира и возрастные различия (различие между ребенком, взрослым, пожилым человеком и т.п.) пассажира. Состояние пассажира может включать в себя персональную информацию пассажира (персональную информацию владельца транспортного средства, персональную информацию члена семьи владельца транспортного средства, персональную информацию пользователя транспортного средства и т.п.). Состояние пассажира может включать в себя состояние надевания ремня безопасности пассажира. Состояние пассажира может включать в себя ориентацию пассажира (ориентацию водителя, сидящего на водительском сиденье).
[0035] Картографическая база 5 данных представляет собой базу данных, которая сохраняет картографическую информацию. Картографическая база 5 данных, например, формируется на жестком диске (HDD), смонтированном в транспортном средстве. Картографическая информация включает в себя информацию позиции дорог, информацию относительно форм дорог (например, типы кривых или линейных частей и кривизны кривых), информацию позиции перекрестков и точек разветвления, информацию позиции конструкций и т.п. Картографическая информация также включает в себя информацию правил дорожного движения, к примеру, правовое ограничение, коррелированное с информацией позиции. Картографическая информация также включает в себя данные инфраструктурных объектов, включающие в себя позиции инфраструктурных объектов и типы инфраструктурных объектов (такие типы, как школа, больница, станция и круглосуточный магазин). Картографическая база 5 данных может сохраняться в компьютере инфраструктурного объекта, к примеру, центра управления, который может осуществлять связь с транспортным средством.
[0036] База 6 данных возможных вариантов пунктов назначения представляет собой базу данных, сохраняющую данные возможных вариантов пунктов назначения относительно возможных вариантов пунктов назначения. Возможные варианты пунктов назначения представляют собой возможные варианты в качестве пунктов назначения для автономного вождения транспортного средства. Возможный вариант пункта назначения может представлять собой точку или инфраструктурный объект на карте. База 6 данных возможных вариантов пунктов назначения сохраняет возможные варианты пунктов назначения в корреляции с позицией транспортного средства на карте, состоянием движения и временем. Время может включать в себя информацию относительно времени года, дня недели и года, месяца и дня. База 6 данных возможных вариантов пунктов назначения может сохраняться на сервере инфраструктурного объекта, к примеру, центра управления, который может осуществлять связь с транспортным средством. База 6 данных возможных вариантов пунктов назначения может представлять собой базу данных, интегрированную с картографической базой 5 данных.
[0037] HMI 7 представляет собой интерфейс для ввода и вывода информации между системой 100 автономного вождения и пассажиром. HMI 7 может включать в себя, например, дисплей и динамик. HMI 7 отображает изображение на дисплее и выводит голос из динамика в ответ на управляющие сигналы из ECU 10. Дисплей может представлять собой дисплей на лобовом стекле. HMI 7 содержит, например, устройства ввода (кнопки, сенсорную панель, машину речевого ввода и т.п.) для приема вводов от пассажира.
[0038] Исполнительное устройство 8 представляет собой устройство, используемое для того, чтобы управлять транспортным средством. Исполнительное устройство 8 включает в себя по меньшей мере исполнительное устройство дросселя, тормозное исполнительное устройство и исполнительное устройство рулевого управления. Исполнительное устройство дросселя управляет объемом (открытием дросселя) воздуха, подаваемого в двигатель в ответ на управляющий сигнал из ECU 10, и управляет движущей силой транспортного средства. В случае если транспортное средство представляет собой гибридное транспортное средство, в дополнение к объему воздуха, подаваемого в двигатель, управляющий сигнал из ECU 10 вводится в электромотор (который функционирует в качестве двигателя) в качестве источника питания, и движущая сила управляется. В случае если транспортное средство представляет собой электротранспортное средство, управляющий сигнал из ECU 10 вводится в электромотор в качестве источника питания, и движущая сила управляется. Электромотор в качестве источника питания в вышеописанном случае формирует исполнительное устройство 8.
[0039] Тормозное исполнительное устройство управляет тормозной системой в ответ на управляющий сигнал из ECU 10 и управляет тормозной силой, прикладываемой к колесу транспортного средства. В качестве тормозной системы, может использоваться гидравлическая тормозная система. Исполнительное устройство рулевого управления управляет приведением в действие вспомогательного электромотора, управляющего крутящим моментом поворота при рулении в системе рулевого управления с электроусилителем руля в ответ на управляющий сигнал из ECU 10. Следовательно, исполнительное устройство рулевого управления управляет крутящим моментом поворота при рулении транспортного средства.
[0040] Далее приводится описание функциональной конфигурации ECU 10. ECU 10 включает в себя устройство 11 получения позиции транспортного средства, модуль 12 получения информации окружающей среды, устройство 13 получения состояний транспортного средства, устройство 14 получения состояний пассажира, модуль 15 определения состояния завершения посадки, модуль 16 задания пунктов назначения, модуль 17 определения условий запуска двигателя, модуль 18 запуска двигателя, модуль 19 формирования плана движения, контроллер 20 транспортного средства, модуль 22 распознавания пунктов назначения и модуль 21 определения разрешений на хранение. Может быть предусмотрен аспект, в котором некоторые функции ECU 10, описанные ниже, выполняются посредством сервера инфраструктурного объекта, к примеру, центра управления, который может осуществлять связь с транспортным средством. ECU 10 соединяется с таймером для получения времени.
[0041] Устройство 11 получения позиции транспортного средства получает позицию транспортного средства на карте на основе информации позиции из приемного GPS-модуля 1 и картографической информации из картографической базы 5 данных. Устройство 11 получения позиции транспортного средства получает позицию транспортного средства согласно технологии одновременной локализации и отображения на карте (SLAM) посредством использования информации позиции неподвижных помех, таких как телеграфные столбы, включенной в картографическую информацию, из картографической базы 5 данных и результата обнаружения во внешнем датчике 2. Устройство 11 получения позиции транспортного средства может получать позицию транспортного средства на карте согласно другим известным способам.
[0042] Модуль 12 получения информации окружающей среды получает окружающую среду транспортного средства на основе результата обнаружения во внешнем датчике 2. Окружающая среда включает в себя позицию помехи для транспортного средства, относительную скорость помехи для транспортного средства, направление движения помехи для транспортного средства и т.п. Модуль 12 получения информации окружающей среды получает окружающую среду транспортного средства согласно известному способу на основе захваченного изображения в камере и информации помех из радарного датчика.
[0043] Устройство 13 получения состояний транспортного средства получает состояние транспортного средства в ходе движения на основе результата обнаружения во внутреннем датчике 3. Состояние транспортного средства включает в себя скорость транспортного средства для транспортного средства, ускорение транспортного средства и скорость относительно вертикальной оси транспортного средства. В частности, устройство 13 получения состояний транспортного средства получает скорость транспортного средства для транспортного средства на основе информации скорости транспортного средства из датчика скорости транспортного средства. Устройство 13 получения состояний транспортного средства получает ускорение (ускорение в направлении спереди назад и поперечное ускорение) транспортного средства на основе информации ускорения из датчика ускорения. Устройство 13 получения состояний транспортного средства получает скорость относительно вертикальной оси транспортного средства на основе информации скорости относительно вертикальной оси из датчика скорости относительно вертикальной оси. Устройство 13 получения состояний транспортного средства получает открытые и закрытые состояния двери транспортного средства на основе результата обнаружения из внутреннего датчика 3 (результата обнаружения из датчика открытия двери).
[0044] Устройство 13 получения состояний транспортного средства получает присутствие или отсутствие неисправностей в каждом бортовом датчике и системе 100 автономного вождения в качестве состояния транспортного средства. Устройство 13 получения состояний транспортного средства получает присутствие или отсутствие неисправностей в каждом бортовом датчике и системе 100 автономного вождения согласно известному способу.
[0045] Устройство 14 получения состояний пассажира получает состояние пассажира транспортного средства на основе результата обнаружения из модуля 4 обнаружения состояний пассажира. Устройство 14 получения состояний пассажира получает число пассажиров транспортного средства и позицию сидения на основе результатов обнаружения (например, захваченных изображений из бортовой камеры и результатов обнаружения из датчика давления на сиденье) из модуля 4 обнаружения состояний пассажира. В случае если имеется водительское сиденье в транспортном средстве, устройство 14 получения состояний пассажира получает то, что пассажир садится на водительское сиденье транспортного средства, на основе результата обнаружения из модуля 4 обнаружения состояний пассажира.
[0046] Устройство 14 получения состояний пассажира может получать пол пассажира, возраст пассажира и т.п. в качестве состояния пассажира. В этом случае, устройство 14 получения состояний пассажира может получать пол пассажира и возрастное различие пассажира согласно известному способу обработки изображений на основе захваченного изображения из бортовой камеры. Устройство 14 получения состояний пассажира может получать персональную информацию пассажира в качестве состояния пассажира. Устройство 14 получения состояний пассажира может указывать человека (например, владельца транспортного средства или члена семьи владельца) посредством комбинирования веса или телосложения человека, сохраненных заранее, с результатом обнаружения из модуля 4 обнаружения состояний пассажира. Устройство 14 получения состояний пассажира может получать состояние надевания ремня безопасности пассажира на основе результата обнаружения из модуля 4 обнаружения состояний пассажира. Устройство 14 получения состояний пассажира может получать состояние надевания ремня безопасности пассажира согласно известному способу обработки изображений на основе захваченного изображения из бортовой камеры. Устройство 14 получения состояний пассажира может получать ориентацию пассажира (состояние водителя, захватывающего руль, состояние пассажира, лежащего на заднем сиденье, и т.п.) на основе результата обнаружения из модуля 4 обнаружения состояний пассажира. Устройство 14 получения состояний пассажира может получать состояние пассажира согласно известному способу.
[0047] Модуль 15 определения состояния завершения посадки определяет то, находится или нет транспортное средство в состоянии завершения посадки, на основе состояния транспортного средства в устройстве 13 получения состояний транспортного средства и состояния пассажира в устройстве 14 получения состояний пассажира в случае, если автономное вождение начинается. Состояние завершения посадки представляет собой состояние, в котором пассажир совершил посадку в транспортное средство. Состояние завершения посадки может представлять собой состояние, в котором по меньшей мере один пассажир садится на сиденье, и все двери транспортного средства закрыты. Состояние завершения посадки может иметь такую необходимую предпосылку, что все пассажиры надевают ремни безопасности. В случае если имеется водительское сиденье в транспортном средстве, модуль 15 определения состояния завершения посадки может иметь такую необходимую предпосылку, что пассажир сел на водительское сиденье. Модуль 15 определения состояния завершения посадки определяет то, находится или нет транспортное средство в состоянии завершения посадки в случае, если автономное вождение начинается даже в ходе движения транспортного средства.
[0048] В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство находится в состоянии завершения посадки, модуль 16 задания пунктов назначения определяет то, может или нет автоматически задаваться пункт назначения при автономном вождении. Модуль 16 задания пунктов назначения определяет то, может или нет автоматически задаваться пункт назначения при автономном вождении, на основе текущего времени, позиции транспортного средства на карте в устройстве 11 получения позиции транспортного средства, состояния пассажира в устройстве 14 получения состояний пассажира и данных возможных вариантов пунктов назначения в базе 6 данных возможных вариантов пунктов назначения.
[0049] Случай, в котором пункт назначения при автономном вождении может автоматически задаваться, например, представляет собой случай, в котором требования, коррелированные по меньшей мере с одним возможным вариантом пункта назначения, включенным в данные возможных вариантов пунктов назначения, совпадают с текущим временем, позицией транспортного средства на карте и состоянием пассажира. Случай, в котором пункт назначения при автономном вождении не может автоматически задаваться, например, представляет собой случай, в котором ни одно из требований, коррелированных с возможными вариантами пунктов назначения, включенными в данные возможных вариантов пунктов назначения, не совпадает с требованиями текущего времени, позиции транспортного средства на карте и состояния пассажира, когда требования сравниваются между собой. Другими словами, в случае если соответствующий возможный вариант пункта назначения не сохраняется в базе 6 данных возможных вариантов пунктов назначения, модуль 16 задания пунктов назначения определяет то, что пункт назначения при автономном вождении не может автоматически задаваться.
[0050] В случае если модуль 16 задания пунктов назначения определяет то, что пункт назначения при автономном вождении может автоматически задаваться, модуль 16 задания пунктов назначения автоматически задает пункт назначения при автономном вождении на основе текущего времени, позиции транспортного средства на карте в устройстве 11 получения позиции транспортного средства, состояния пассажира в устройстве 14 получения состояний пассажира и данных возможных вариантов пунктов назначения в базе 6 данных возможных вариантов пунктов назначения.
[0051] В частности, в случае если "домой" в качестве позиции на транспортном средстве на карте, "один мужчина" в качестве состояния пассажира и "между 7:00 и 8:00 утром в рабочие дни" в качестве времени коррелируются в качестве требований с "компанией A", которая представляет собой возможный вариант пункта назначения в данных возможных вариантов пунктов назначения, модуль 16 задания пунктов назначения задает "компанию A" в качестве пункта назначения при автономном вождении, когда текущее время представляет собой "между 7:00 и 8:00 утром в рабочие дни", позиция транспортного средства на карте представляет собой "домой", и состояние пассажира представляет собой "один мужчина".
[0052] В частности, в случае если "между 7:00 и 8:00 утром в рабочие дни" в качестве времени, "домой" в качестве позиции на транспортном средстве на карте и "один мужчина и один ребенок" в качестве состояния пассажира коррелируются в качестве требований с "начальной школой B", которая представляет собой возможный вариант пункта назначения в данных возможных вариантов пунктов назначения, модуль 16 задания пунктов назначения задает "начальную школу B" в качестве пункта назначения при автономном вождении, когда текущее время представляет собой "между 7:00 и 8:00 утром в рабочие дни", позиция транспортного средства на карте представляет собой "домой", и состояние пассажира представляет собой "один мужчина и один ребенок".
[0053] Поскольку предусмотрен случай, в котором водитель заставляет транспортное средство двигаться в вождении вручную на пути в компания из дома и затем начинает автономное вождение, модуль 16 задания пунктов назначения может распознавать требование позиции транспортного средства на карте, совпадающей с "компания A", когда позиция транспортного средства на карте представляет собой позицию "между домом и компанией A". В случае если маршрут, по которому транспортное средство достигает возможного варианта пункта назначения, вычисляется на основе позиции транспортного средства на карте и возможного варианта пункта назначения, и транспортное средство расположено по маршруту, модуль 16 задания пунктов назначения может распознавать, что требование позиции, коррелированной с возможным вариантом пункта назначения, совпадает с позицией транспортного средства на карте.
[0054] В случае если имеется возможный вариант пункта назначения, удовлетворяющий требованию, коррелированному только с одним из текущего времени, позиции транспортного средства на карте и состояния пассажира, и отсутствует возможный вариант пункта назначения, удовлетворяющий каким-либо другим требованиям, модуль 16 задания пунктов назначения может задавать возможный вариант пункта назначения, удовлетворяющий требованию, коррелированному только с одним из означенного, в качестве пункта назначения.
[0055] Совпадения между требованиями, такими как текущее время, позиция транспортного средства на карте и состояние пассажира, и требованиями для возможного варианта пункта назначения могут не совпадать точно. Когда разность между временем, коррелированным с возможным вариантом пункта назначения, и текущим временем находится в пределах предварительно определенного времени, модуль 16 задания пунктов назначения может распознавать, что текущее время совпадает со временем, коррелированным с возможным вариантом пункта назначения. Когда разность между позицией, коррелированной с возможным вариантом пункта назначения, и позицией транспортного средства на карте находится в пределах предварительно определенного расстояния, модуль 16 задания пунктов назначения может распознавать, что позиция транспортного средства на карте совпадает с позицией, коррелированной с возможным вариантом пункта назначения. Когда разность между числом пассажиров, коррелированных с возможным вариантом пункта назначения, и текущим числом пассажиров находится в пределах предварительно определенного числа людей, модуль 16 задания пунктов назначения может распознавать, что состояние пассажира совпадает с состоянием пассажира, коррелированным с возможным вариантом пункта назначения.
[0056] В случае если модуль 16 задания пунктов назначения определяет то, что пункт назначения при автономном вождении не может автоматически задаваться, модуль 16 задания пунктов назначения запрашивает пассажира на предмет того, чтобы задавать пункт назначения через HMI 7. Модуль 16 задания пунктов назначения задает пункт назначения при автономном вождении на основе результата, который вводится в HMI 7 пассажиром.
[0057] В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство находится в состоянии завершения посадки в то время, когда двигатель транспортного средства остановлен, модуль 17 определения условий запуска двигателя определяет то, удовлетворяется или нет предварительно установленное условие запуска двигателя, на основе состояния транспортного средства. Условие запуска двигателя представляет собой условие для автоматического запуска двигателя транспортного средства. Условие запуска двигателя включает в себя то, что бортовые датчики и система 100 автономного вождения не выходят из строя.
[0058] Условие запуска двигателя может включать в себя то, что все пассажиры надевают свои ремни безопасности. Условие запуска двигателя может включать в себя то, что величина энергии (объем бензина, объем водорода или величина электроэнергии) транспортного средства, в общем, равна или превышает предварительно определенное пороговое значение.
[0059] В случае если модуль 17 определения условий запуска двигателя определяет то, что условие запуска двигателя удовлетворяется, модуль 18 запуска двигателя запускает двигатель транспортного средства. Двигатель также включает в себя электромотор, который функционирует в качестве источника питания транспортного средства. Модуль 18 запуска двигателя передает управляющий сигнал в исполнительное устройство 8, с тем чтобы автоматически запускать двигатель транспортного средства.
[0060] В случае если модуль 17 определения условий запуска двигателя определяет то, что условие запуска двигателя не удовлетворяется, модуль 18 запуска двигателя уведомляет пассажира в отношении причины невыполнения автоматического запуска двигателя через HMI 7. Модуль 18 запуска двигателя уведомляет пассажира, например, в отношении присутствия условия, при котором условие запуска двигателя не удовлетворяется, в качестве причины невыполнения автоматического запуска двигателя.
[0061] Модуль 19 формирования плана движения формирует план движения транспортного средства на основе заданного пункта назначения, картографической информации в картографической базе 5 данных, позиции транспортного средства на карте в устройстве 11 получения позиции транспортного средства, окружающей среды транспортного средства в модуле 12 получения информации окружающей среды и состояния транспортного средства в устройстве 13 получения состояний транспортного средства. Модуль 19 формирования плана движения начинает формировать план движения в случае, если водитель выполняет операцию начала автономного вождения.
[0062] План движения включает в себя целевые значения управления транспортного средства, соответствующие позициям на целевом маршруте (маршруте к пункту назначения) транспортного средства. Позиции на целевом маршруте представляют собой позиции в направлении прохождения целевого маршрута на карте. Позиции на целевом маршруте указывают заданные вертикальные позиции, которые задаются с предварительно определенным интервалом (например, 1 м) в направлении прохождения целевого маршрута. Целевые значения управления являются целевыми значениями для управления транспортным средством в плане движения. Целевое значение управления задается с возможностью коррелироваться с каждой заданной вертикальной позицией на целевом маршруте. Модуль 19 формирования плана движения задает заданные вертикальные позиции с предварительно определенным интервалом на целевом маршруте и задает целевые значения управления (например, целевую горизонтальную позицию и целевую скорость транспортного средства) для каждой заданной вертикальной позиции, с тем чтобы формировать план движения. Заданная вертикальная позиция и целевая горизонтальная позиция могут совместно задаваться в качестве одной координаты позиции. Заданная вертикальная позиция и целевая горизонтальная позиция, соответственно, указывают информацию относительно вертикальной позиции и информацию относительно горизонтальной позиции, которые задаются в качестве целей в плане движения.
[0063] Контроллер 20 транспортного средства управляет движением транспортного средства. Контроллер 20 транспортного средства выполняет автономное вождение транспортного средства на основе картографической информации в картографической базе 5 данных, позиции транспортного средства на карте в устройстве 11 получения позиции транспортного средства, окружающей среды транспортного средства в модуле 12 получения информации окружающей среды, состояния транспортного средства в устройстве 13 получения состояний транспортного средства и плана движения в модуле 19 формирования плана движения. Контроллер 20 транспортного средства передает управляющий сигнал в исполнительное устройство 8 и ввиду этого выполняет автономное вождение транспортного средства согласно плану движения.
[0064] В случае если транспортное средство прибывает к месту назначения в автономном режиме вождения, модуль 21 определения разрешений на хранение выполняет запрос на предмет разрешения сохранять пункт назначения в базе 6 данных возможных вариантов пунктов назначения через HMI 7. Модуль 21 определения разрешений на хранение определяет то, разрешает или нет пассажир сохранение пункта назначения в базе 6 данных возможных вариантов пунктов назначения, на основе результата, который вводится в HMI 7 пассажиром.
[0065] В случае если модуль 21 определения разрешений на хранение определяет то, что пассажир разрешает сохранение пункта назначения в базе 6 данных возможных вариантов пунктов назначения, модуль 21 определения разрешений на хранение сохраняет пункт назначения в базе 6 данных возможных вариантов пунктов назначения в качестве возможного варианта пункта назначения в корреляции с состоянием пассажира. Модуль 21 определения разрешений на хранение сохраняет состояние пассажира, когда пункт назначения задается, или состояние пассажира, когда транспортное средство прибывает к месту назначения, в базе 6 данных возможных вариантов пунктов назначения в корреляции с возможным вариантом пункта назначения.
[0066] В случае если модуль 21 определения разрешений на хранение определяет то, что пассажир не разрешает сохранение пункта назначения в базе 6 данных возможных вариантов пунктов назначения, модуль 21 определения разрешений на хранение не сохраняет пункт назначения в базе 6 данных возможных вариантов пунктов назначения в качестве возможного варианта пункта назначения. В случае если запрос на разрешение предоставляется пассажиру, и затем предварительно определенное время истекает в состоянии, в котором отсутствует ввод от пассажира, модуль 21 определения разрешений на хранение определяет то, что не разрешается сохранение пункта назначения в базе 6 данных возможных вариантов пунктов назначения.
[0067] Модуль 22 распознавания пунктов назначения выполняет распознавание в отношении базы 6 данных возможных вариантов пунктов назначения. Модуль 22 распознавания пунктов назначения сохраняет возможный вариант пункта назначения, сохраненный в базе 6 данных возможных вариантов пунктов назначения посредством модуля 21 определения разрешений на хранение в базе 6 данных возможных вариантов пунктов назначения в корреляции с такими требованиями, как позиция транспортного средства на карте. Модуль 22 распознавания пунктов назначения инструктирует базе 6 данных возможных вариантов пунктов назначения распознавать позиции транспортного средства на карте, состояние пассажира транспортного средства, время и возможный вариант пункта назначения, когда возможный вариант пункта назначения задается в качестве пункта назначения при автономном вождении пассажиром, в корреляции между собой.
[0068] Модуль 22 распознавания пунктов назначения корректирует или удаляет содержимое данных возможных вариантов пунктов назначения, сохраненных в базе 6 данных возможных вариантов пунктов назначения, на основе результата, который вводится в HMI 7 пассажиром. Способ распознавания не ограничен вышеописанным способом, и могут использоваться различные известные способы. Модуль 21 определения разрешений на хранение и модуль 22 распознавания пунктов назначения могут предоставляться на сервере, который может осуществлять связь с транспортным средством.
Процессы в системе автономного вождения согласно первому варианту осуществления
[0069] Далее, со ссылкой на чертежи, приводится описание процессов в системе 100 автономного вождения согласно первому варианту осуществления. В данном документе, описываются процесс задания пунктов назначения, процесс запуска двигателя, процесс сохранения возможных вариантов пунктов назначения.
Процесс задания пунктов назначения
[0070] Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процесс задания пунктов назначения согласно первому варианту осуществления. Блок-схема последовательности операций способа, показанная на фиг. 2, выполняется, когда начинается автономное вождение.
[0071] Как проиллюстрировано на фиг. 2, на S10, ECU 10 системы 100 автономного вождения инструктирует модулю 15 определения состояния завершения посадки определять то, находится или нет транспортное средство в состоянии завершения посадки. Модуль 15 определения состояния завершения посадки выполняет определение на основе состояния транспортного средства в устройстве 13 получения состояний транспортного средства и состояния пассажира в устройстве 14 получения состояний пассажира. В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство не находится в состоянии завершения посадки (S10: "Нет"), ECU 10 заканчивает этот процесс. После этого, ECU 10 выполняет процесс на S10 снова после того, как истекает предварительно определенное время. В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство находится в состоянии завершения посадки (S10: "Да"), ECU 10 переходит к S12.
[0072] На S12, ECU 10 определяет то, может или нет автоматически задаваться пункт назначения при автономном вождении с помощью модуля 16 задания пунктов назначения. Модуль 16 задания пунктов назначения выполняет определение на основе текущего времени, позиции транспортного средства на карте в устройстве 11 получения позиции транспортного средства, состояния пассажира в устройстве 14 получения состояний пассажира и данных возможных вариантов пунктов назначения в базе 6 данных возможных вариантов пунктов назначения. В случае если модуль 16 задания пунктов назначения определяет то, что пункт назначения при автономном вождении не может автоматически задаваться (S12: "Нет"), ECU 10 переходит к S14. В случае если модуль 16 задания пунктов назначения определяет то, что пункт назначения при автономном вождении может автоматически задаваться (S12: "Да"), ECU 10 переходит к S18.
[0073] На S14, ECU 10 запрашивает пассажира на предмет того, чтобы задавать пункт назначения с помощью модуля 16 задания пунктов назначения. Модуль 16 задания пунктов назначения запрашивает пассажира на предмет того, чтобы задавать пункт назначения через HMI 7 посредством использования по меньшей мере одного из отображения изображений и речевого вывода. На S16, ECU 10 задает пункт назначения при автономном вождении на основе результата, который вводится в HMI 7 пассажиром, с помощью модуля 16 задания пунктов назначения. После этого, ECU 10 заканчивает этот процесс.
[0074] На S18, ECU 10 задает пункт назначения при автономном вождении с помощью модуля 16 задания пунктов назначения. Модуль 16 задания пунктов назначения автоматически задает пункт назначения при автономном вождении на основе текущего времени, позиции транспортного средства на карте в устройстве 11 получения позиции транспортного средства, состояния пассажира в устройстве 14 получения состояний пассажира и данных возможных вариантов пунктов назначения в базе 6 данных возможных вариантов пунктов назначения. После этого, ECU 10 заканчивает этот процесс.
Процесс запуска двигателя
[0075] Далее приводится описание процесса запуска двигателя в системе 100 автономного вождения согласно первому варианту осуществления. Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей процесс запуска двигателя согласно первому варианту осуществления. Блок-схема последовательности операций способа, показанная на фиг. 3, выполняется в случае, если автономное вождение начинается в ходе остановки двигателя транспортного средства.
[0076] Как проиллюстрировано на фиг. 3, на S20, ECU 10 инструктирует модулю 15 определения состояния завершения посадки определять то, находится или нет транспортное средство в состоянии завершения посадки. В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство не находится в состоянии завершения посадки (S20: "Нет"), ECU 10 заканчивает этот процесс. После этого, ECU 10 выполняет процесс на S20 снова после того, как истекает предварительно определенное время. В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство находится в состоянии завершения посадки (S20: "Да"), ECU 10 переходит к S22.
[0077] На S22, ECU 10 инструктирует модулю 17 определения условий запуска двигателя определять то, удовлетворяется или нет предварительно установленное условие запуска двигателя. Модуль 17 определения условий запуска двигателя выполняет определение на основе состояния транспортного средства. В случае если модуль 17 определения условий запуска двигателя определяет то, что условие запуска двигателя не удовлетворяется (S22: "Нет"), ECU 10 переходит к S24. В случае если модуль 17 определения условий запуска двигателя определяет то, что условие запуска двигателя удовлетворяется (S22: "Да"), ECU 10 переходит к S26.
[0078] На S24, ECU 10 уведомляет пассажира в отношении причины невыполнения автоматического запуска двигателя с помощью модуля 18 запуска двигателя. Модуль 18 запуска двигателя отправляет уведомление пассажиру через HMI 7 посредством использования по меньшей мере одного из отображения изображений и речевого вывода. ECU 10 заканчивает этот процесс. После этого, ECU 10 выполняет процесс на S20 снова после того, как истекает предварительно определенное время.
[0079] На S26, ECU 10 инструктирует модулю 18 запуска двигателя запускать двигатель транспортного средства. Модуль 18 запуска двигателя передает управляющий сигнал в исполнительное устройство 8, и ввиду этого автоматически запускает двигатель транспортного средства. После этого, ECU 10 заканчивает этот процесс.
Процесс сохранения возможных вариантов пунктов назначения
[0080] Далее приводится описание процесса сохранения возможных вариантов пунктов назначения в системе 100 автономного вождения согласно первому варианту осуществления. Фиг. 4 является блок-схемой последовательности операций способа, иллюстрирующей процесс сохранения возможных вариантов пунктов назначения согласно первому варианту осуществления. Блок-схема последовательности операций способа, показанная на фиг. 4, выполняется в случае, если транспортное средство прибывает к месту назначения в автономном режиме вождения.
[0081] Как проиллюстрировано на фиг. 4, ECU 10 выполняет запрос на предмет разрешения сохранять пункт назначения в базе 6 данных возможных вариантов пунктов назначения с помощью модуля 21 определения разрешений на хранение. Модуль 21 определения разрешений на хранение выдает запрос на разрешение пассажиру посредством использования по меньшей мере одного из отображения изображений и речевого вывода через HMI 7.
[0082] На S32, ECU 10 инструктирует модулю 21 определения разрешений на хранение определять то, разрешает или нет пассажир сохранение пункта назначения в базе 6 данных возможных вариантов пунктов назначения. Модуль 21 определения разрешений на хранение выполняет определение на основе результата, который вводится в HMI 7 пассажиром. В случае если модуль 21 определения разрешений на хранение определяет то, что пассажир не разрешает сохранение пункта назначения в базе 6 данных возможных вариантов пунктов назначения (S32: "Нет"), ECU 10 заканчивает этот процесс без сохранения пункта назначения в базе 6 данных возможных вариантов пунктов назначения. В случае если модуль 21 определения разрешений на хранение определяет то, что пассажир разрешает сохранение пункта назначения в базе 6 данных возможных вариантов пунктов назначения (S32: "Да"), ECU 10 переходит к S34.
[0083] На S34, ECU 10 инструктирует модулю 21 определения разрешений на хранение сохранять пункт назначения в базе 6 данных возможных вариантов пунктов назначения в качестве возможного варианта пункта назначения в корреляции с состоянием пассажира. Модуль 21 определения разрешений на хранение сохраняет состояние пассажира в момент, когда пункт назначения задается, или состояние пассажира в момент, когда транспортное средство прибывает к месту назначения, в базе 6 данных возможных вариантов пунктов назначения в корреляции с возможным вариантом пункта назначения. Модуль 21 определения разрешений на хранение сохраняет пункт назначения, разрешенный пассажиром, в базе 6 данных возможных вариантов пунктов назначения в качестве возможного варианта пункта назначения. После этого, ECU 10 заканчивает этот процесс.
Преимущества системы автономного вождения согласно первому варианту осуществления
[0084] Согласно вышеописанной системе 100 автономного вождения первого варианта осуществления, в случае если транспортное средство определяется как находящееся в состоянии завершения посадки, пункт назначения при автономном вождении транспортного средства может автоматически задаваться на основе позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения, и ввиду этого пассажир может опускать ручное задание пункта назначения. Согласно системе 100 автономного вождения, поскольку пункт назначения на основе состояния пассажира задается с учетом взаимосвязи между состоянием пассажира и пунктом назначения, требуемым пассажиром, может дополнительно повышаться точность автоматического задания пункта назначения, требуемая пассажиром, и ввиду этого может дополнительно повышаться удобство пассажира.
[0085] Согласно системе 100 автономного вождения, пункт назначения при автономном вождении может задаваться на основе часов-пик при езде на работу и часов посещения школы дополнительно с учетом текущего времени при автоматическом задании пункта назначения.
[0086] Согласно системе 100 автономного вождения, поскольку модуль 21 определения разрешений на хранение сохраняет пункт назначения, разрешенный пассажиром, в базе 6 данных возможных вариантов пунктов назначения в качестве возможного варианта пункта назначения, можно не допускать включения несоответствующего возможного варианта пункта назначения в данные возможных вариантов пунктов назначения.
[0087] Согласно системе 100 автономного вождения, в случае если транспортное средство переводится в состояние завершения посадки в ходе остановки двигателя транспортного средства, и условие запуска двигателя определяется как удовлетворяемое, двигатель транспортного средства автоматически запускается, и ввиду этого может значительно повышаться удобство относительно запуска двигателя пассажира.
Второй вариант осуществления
[0088] Далее приводится описание системы 200 автономного вождения согласно второму варианту осуществления. Фиг. 5 является блок-схемой, иллюстрирующей систему 200 автономного вождения согласно второму варианту осуществления. Система 200 автономного вождения, проиллюстрированная на фиг. 5, отличается от системы автономного вождения первого варианта осуществления тем, что пункт назначения при автономном вождении задается на основе данных расписания пассажира. На фиг. 5, составляющим элементам, идентичным или соответствующим составляющим элементам первого варианта осуществления, присваиваются идентичные позиционные обозначения, и повторное описание опускается.
Конфигурация системы автономного вождения согласно второму варианту осуществления
[0089] Как проиллюстрировано на фиг. 5, ECU 30 системы 200 автономного вождения согласно второму варианту осуществления соединяется с терминальным устройством 31 связи, сетевым устройством 32 связи и базой 33 данных приоритезации.
[0090] Терминальное устройство 31 связи представляет собой устройство связи, которое осуществляет связь с портативным информационным терминалом, носимым пассажиром. Портативный информационный терминал представляет собой, например, смартфон, ноутбук, интеллектуальные часы и другие портативные информационные терминалы, которые могут носиться пассажиром. Терминальное устройство 31 связи получает разрешение пассажира заранее, затем осуществляет связь с портативным информационным терминалом в отношении того, что пассажир совершил посадку в транспортное средство, и получает данные расписания пассажира, записанные в портативный информационный терминал (или на сервер через портативный информационный терминал).
[0091] Данные расписания являются данными, включающими в себя расписание пассажира. Расписание включает в себя местоположение и время. Данные расписания включают в себя запланированный пункт назначения и запланированное время пассажира. Запланированный пункт назначения представляет собой позицию на карте, зарегистрированную в корреляции с запланированным временем в данных расписания.
[0092] Сетевое устройство 32 связи представляет собой устройство связи, которое осуществляет связь с беспроводной сетью, такой как Интернет. Сетевое устройство 32 связи получает разрешение пассажира заранее и затем получает данные расписания пассажира, записанные на сервере, через беспроводную сеть на основе информации персональной аутентификации пассажира. Ниже описывается информация персональной аутентификации.
[0093] База 33 данных приоритезации представляет собой базу данных, в которой записываются данные приоритезации. Данные приоритезации являются данными (предварительно установленными данными), используемыми для приоритезации относительно задания пункта назначения в случае, если данные расписания множества пассажиров получаются. В данных приоритезации, различие (водительское сиденье, пассажирское сиденье, заднее сиденье и т.п.) между позициями сидения пассажиров коррелируется с приоритетом. Данные приоритезации могут включать в себя опцию для запроса пассажира на предмет того, чтобы задавать пункт назначения при предварительно определенной ситуации.
[0094] Например, в случае если транспортное средство представляет собой такси, даже в случае, если запланированный пункт назначения присутствует в данных расписания водителя, данные приоритезации могут быть данными, которые приоритезируют запланированный пункт назначения пассажира пассажирского сиденья или пассажира заднего сиденья по сравнению с его данными расписания. В случае если множество пассажиров присутствуют на заднем сиденье, данные приоритезации могут быть данными, которые приоритезируют запланированный пункт назначения по сравнению с данными расписания пассажира на сиденье (почетном сиденье) позади водительского сиденья. В случае если запланированные пункты назначения по меньшей мере двух людей совпадают между собой из запланированных пунктов назначения множества людей в данных расписания, данные приоритезации могут быть данными, которые приоритезируют совпадающие запланированные пункты назначения по сравнению с запланированными пунктами назначения, которые не совпадают между собой. В данных приоритезации, информация персональной аутентификации может коррелироваться с приоритетом. База 33 данных приоритезации может предоставляться на сервере, который может осуществлять связь с транспортным средством. База 33 данных приоритезации может представлять собой базу данных, интегрированную с картографической базой 5 данных, или базу 6 данных возможных вариантов пунктов назначения.
[0095] ECU 30 системы 200 автономного вождения согласно второму варианту осуществления включает в себя устройство 34 персональной аутентификации и модуль 35 получения данных расписания. ECU 30 имеет отличие с точки зрения функции модуля 36 задания пунктов назначения по сравнению с первым вариантом осуществления.
[0096] Устройство 34 персональной аутентификации выполняет персональную аутентификацию пассажира через HMI 7 и т.п. Устройство 34 персональной аутентификации выполняет персональную аутентификацию пассажира через распознавание лиц с использованием захваченного изображения в бортовой камере, влажного распознавания с использованием результата обнаружения в датчике давления на сиденье и т.п. Система 200 автономного вождения может содержать устройство распознавания радужной оболочки глаз, устройство распознавания отпечатков пальцев и другие устройства ввода для персональной аутентификации. Устройство 34 персональной аутентификации выполняет персональную аутентификацию пассажира согласно известному способу.
[0097] В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство представляет собой состояние завершения посадки, модуль 35 получения данных расписания получает данные расписания пассажира. Модуль 35 получения данных расписания получает данные расписания пассажира из портативного информационного терминала, носимого пассажиром, через терминальное устройство 31 связи. Модуль 35 получения данных расписания также может получать информацию позиции портативного информационного терминала. Модуль 35 получения данных расписания получает данные расписания пассажира, прошедшего персональную аутентификацию с использованием устройства 34 персональной аутентификации, из сервера по беспроводной сети через сетевое устройство 32 связи.
[0098] В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство находится в состоянии завершения посадки, модуль 36 задания пунктов назначения определяет то, может или нет автоматически задаваться пункт назначения при автономном вождении. Модуль 36 задания пунктов назначения определяет то, может или нет автоматически задаваться пункт назначения при автономном вождении, на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных расписания, полученных посредством модуля 35 получения данных расписания.
[0099] Даже в случае, если ни одно из требований, коррелированных с возможными вариантами пунктов назначения, включенными в данные возможных вариантов пунктов назначения, не совпадает с требованиями текущего времени, позиции транспортного средства на карте и состояния пассажира, когда требования сравниваются между собой, модуль 36 задания пунктов назначения определяет то, что пункт назначения при автономном вождении может автоматически задаваться, в случае если модуль 35 получения данных расписания получает данные расписания пассажира, включающие в себя запланированный пункт назначения.
[0100] В случае если модуль 36 задания пунктов назначения определяет то, что пункт назначения при автономном вождении может задаваться, модуль 36 задания пунктов назначения автоматически задает пункт назначения при автономном вождении на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных расписания пассажира.
[0101] Во-первых, приводится описание случая, в котором элементы данных расписания одного пассажира получаются посредством модуля 35 получения данных расписания. Модуль 36 задания пунктов назначения получает запланированный пункт назначения (запланированный пункт назначения, коррелированный с расписанием в одну единицу времени после текущего времени), в который транспортное средство должно направляться далее в данный момент времени, из данных расписания пассажира. Модуль 36 задания пунктов назначения получает возможный вариант пункта назначения, совпадающий с требованием по меньшей мере одного из текущего времени, позиции транспортного средства на карте и состояния пассажира из данных возможных вариантов пунктов назначения на основе текущего времени, позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения.
[0102] В случае если модуль 36 задания пунктов назначения получает возможный вариант пункта назначения, но не может получать запланированный пункт назначения, модуль 36 задания пунктов назначения задает возможный вариант пункта назначения в качестве пункта назначения при автономном вождении. В случае если модуль 36 задания пунктов назначения получает запланированный пункт назначения, но не может получать возможный вариант пункта назначения, модуль 36 задания пунктов назначения задает запланированный пункт назначения в качестве пункта назначения при автономном вождении.
[0103] В случае если модуль 36 задания пунктов назначения получает как возможный вариант пункта назначения, так и запланированный пункт назначения, модуль 36 задания пунктов назначения определяет то, совпадает или нет возможный вариант пункта назначения с запланированным пунктом назначения. В случае если модуль 36 задания пунктов назначения определяет то, что возможный вариант пункта назначения совпадает с запланированным пунктом назначения, модуль 36 задания пунктов назначения задает возможный вариант пункта назначения в качестве пункта назначения при автономном вождении.
[0104] В случае если модуль 36 задания пунктов назначения определяет то, что возможный вариант пункта назначения не совпадает с запланированным пунктом назначения, модуль 36 задания пунктов назначения может запрашивать пассажира на предмет того, чтобы выбирать возможный вариант пункта назначения или запланированный пункт назначения. Модуль 36 задания пунктов назначения задает пункт назначения при автономном вождении на основе выбора пассажира. В случае если модуль 36 задания пунктов назначения определяет то, что возможный вариант пункта назначения не совпадает с запланированным пунктом назначения, модуль 36 задания пунктов назначения может задавать одно из возможного варианта пункта назначения и запланированного пункта назначения в качестве пункта назначения при автономном вождении на основе предварительно установленного правила задания приоритета.
[0105] В случае если модуль 36 задания пунктов назначения определяет то, что возможный вариант пункта назначения не совпадает с запланированным пунктом назначения, модуль 36 задания пунктов назначения может определять правильность данных расписания пассажира. В случае если модуль 36 задания пунктов назначения вычисляет время прибытия, в которое транспортное средство прибывает в запланированный пункт назначения, в данных расписания пассажира в автономном режиме вождения, и время прибытия представляет собой время позднее запланированного времени, коррелированного с запланированным пунктом назначения в данных расписания, модуль 36 задания пунктов назначения определяет то, что данные расписания являются надлежащими. В этом случае, модуль 36 задания пунктов назначения может задавать запланированный пункт назначения в качестве пункта назначения при автономном вождении. В случае если время прибытия для запланированного пункта назначения представляет собой время раньше запланированного времени, модуль 36 задания пунктов назначения определяет то, что данные расписания не являются надлежащими. В этом случае, модуль 36 задания пунктов назначения задает возможный вариант пункта назначения в качестве пункта назначения при автономном вождении. В случае если модуль 36 задания пунктов назначения определяет то, что данные расписания не являются надлежащими, модуль 36 задания пунктов назначения может запрашивать пассажира на предмет того, чтобы выбирать запланированный пункт назначения и возможный вариант пункта назначения, посредством представления запланированного пункта назначения и возможного варианта пункта назначения пассажиру. Модуль 36 задания пунктов назначения задает пункт назначения при автономном вождении на основе выбора пассажира.
[0106] Далее приводится описание случая, в котором данные расписания множества пассажиров получаются посредством модуля 35 получения данных расписания. В случае если элементы данных расписания множества пассажиров получаются посредством модуля 35 получения данных расписания, модуль 36 задания пунктов назначения задает пункт назначения при автономном вождении на основе данных приоритезации в базе 33 данных приоритезации в дополнение к текущему времени, позиции транспортного средства на карте, состоянию пассажира, данным возможных вариантов пунктов назначения и данным расписания пассажиров.
[0107] Модуль 36 задания пунктов назначения получает соответствующие запланированные пункты назначения, в которые транспортное средство должно направляться далее в данный момент времени, из элементов данных расписания пассажиров. Модуль 36 задания пунктов назначения выбирает запланированный пункт назначения, который должен использоваться, из множества полученных запланированных пунктов назначения на основе данных приоритезации. В случае если полученные запланированные пункты назначения совпадают между собой, модуль 36 задания пунктов назначения использует совпадающие запланированные пункты назначения на основе данных приоритезации.
[0108] В случае если ни один из полученных запланированных пунктов назначения не совпадает между собой, модуль 36 задания пунктов назначения получает позиции сидения пассажиров, из которых получаются данные расписания, на основе состояния пассажира и информации персональной аутентификации. Модуль 36 задания пунктов назначения может получать позиции сидения пассажиров, из которых получаются данные расписания, из информации позиции портативного информационного терминала, полученной посредством модуля 35 получения данных расписания, вместо информации персональной аутентификации. Модуль 36 задания пунктов назначения применяет приоритет к запланированным пунктам назначения согласно позициям сидения пассажиров, из которых получаются данные расписания. Модуль 36 задания пунктов назначения может понижать приоритет запланированного пункта назначения водителя по сравнению с запланированными пунктами назначения пассажиров на заднем сиденье на основе данных приоритезации.
[0109] Модуль 36 задания пунктов назначения может вычислять время прибытия транспортного средства в автономном режиме вождения для каждого запланированного пункта назначения и может применять приоритет к запланированному пункту назначения на основе взаимосвязи между запланированным временем для запланированного пункта назначения и временем прибытия. В этом случае, модуль 36 задания пунктов назначения понижает приоритет запланированного пункта назначения, для которого время прибытия составляет предварительно определенное время или более до запланированного времени либо предварительно определенное время или более после запланированного времени, по сравнению с запланированным пунктом назначения, для которого время прибытия составляет около запланированного времени (в пределах предварительно определенного времени после запланированного времени). Модуль 36 задания пунктов назначения использует один запланированный пункт назначения, имеющий наивысший приоритет.
[0110] В случае если модуль 36 задания пунктов назначения использовал запланированный пункт назначения, модуль 36 задания пунктов назначения задает пункт назначения при автономном вождении из возможных вариантов пунктов назначения или запланированного пункта назначения таким же образом, как в вышеописанном случае, в котором получаются данные расписания одного пассажира.
Процессы в системе автономного вождения согласно второму варианту осуществления
Процесс задания пунктов назначения
[0111] Далее приводится описание процесса задания пунктов назначения в системе 200 автономного вождения согласно второму варианту осуществления. Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей процесс задания пунктов назначения согласно второму варианту осуществления. Блок-схема последовательности операций способа, показанная на фиг. 6, выполняется, когда начинается автономное вождение. Процесс запуска двигателя и процесс сохранения возможных вариантов пунктов назначения являются идентичными процессам в первом варианте осуществления, и ввиду этого их описание опускается.
[0112] Как проиллюстрировано на фиг. 6, на S40, ECU 30 системы 200 автономного вождения инструктирует модулю 15 определения состояния завершения посадки определять то, находится или нет транспортное средство в состоянии завершения посадки. Модуль 15 определения состояния завершения посадки выполняет определение на основе состояния транспортного средства в устройстве 13 получения состояний транспортного средства и состояния пассажира в устройстве 14 получения состояний пассажира. В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство не находится в состоянии завершения посадки (S40: "Нет"), ECU 30 заканчивает этот процесс. После этого, ECU 30 выполняет процесс на S40 снова после того, как истекает предварительно определенное время. В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство находится в состоянии завершения посадки (S40: "Да"), ECU 30 переходит к S42.
[0113] На S42, ECU 30 инструктирует устройству 34 персональной аутентификации выполнять персональную аутентификацию пассажира, а модулю 35 получения данных расписания - получать данные расписания пассажира. Модуль 35 получения данных расписания получает данные расписания пассажира из портативного информационного терминала, носимого пассажиром, через терминальное устройство 31 связи. Модуль 35 получения данных расписания получает данные расписания пассажира, прошедшего персональную аутентификацию с использованием устройства 34 персональной аутентификации, из сервера по беспроводной сети через сетевое устройство 32 связи.
[0114] На S44, ECU 30 инструктирует модулю 36 задания пунктов назначения определять то, получаются или нет элементы данных расписания множества пассажиров. В случае если модуль 36 задания пунктов назначения определяет то, что элементы данных расписания пассажиров получаются (S44: "Да"), ECU 30 переходит к S46. В случае если модуль 36 задания пунктов назначения определяет то, что элементы данных расписания пассажиров не получаются (S44: "Нет"), ECU 30 переходит к S48.
[0115] На S46, ECU 30 инструктирует модулю 36 задания пунктов назначения использовать один запланированный пункт назначения. Модуль 36 задания пунктов назначения использует один из запланированных пунктов назначения в элементах данных расписания пассажиров на основе данных приоритезации. После этого, ECU 30 переходит к S48.
[0116] На S48, ECU 30 инструктирует модулю 36 задания пунктов назначения определять то, может или нет автоматически задаваться пункт назначения при автономном вождении. Модуль 36 задания пунктов назначения выполняет определение на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных расписания. В случае если модуль 36 задания пунктов назначения определяет то, что пункт назначения при автономном вождении не может автоматически задаваться (S48: "Нет"), ECU 30 переходит к S50. В случае если модуль 36 задания пунктов назначения определяет то, что пункт назначения при автономном вождении может автоматически задаваться (S48: "Да"), ECU 30 переходит к S54. Даже в случае, если соответствующий возможный вариант пункта назначения, соответствующий текущему времени, позиции транспортного средства на карте и состоянию пассажира, не включен в данные возможных вариантов пунктов назначения, модуль 36 задания пунктов назначения второго варианта осуществления определяет то, что пункт назначения при автономном вождении может автоматически задаваться, когда могут получаться данные расписания, включающие в себя запланированный пункт назначения.
[0117] На S50, ECU 30 запрашивает пассажира на предмет того, чтобы задавать пункт назначения с помощью модуля 36 задания пунктов назначения. Модуль 36 задания пунктов назначения запрашивает пассажира на предмет того, чтобы задавать пункт назначения через HMI 7 посредством использования по меньшей мере одного из отображения изображений и речевого вывода. На S52, ECU 30 задает пункт назначения при автономном вождении на основе результата, который вводится в HMI 7 пассажиром, с помощью модуля 36 задания пунктов назначения. После этого, ECU 30 заканчивает этот процесс.
[0118] На S54, ECU 30 задает пункт назначения при автономном вождении с помощью модуля 36 задания пунктов назначения. Модуль 36 задания пунктов назначения автоматически задает пункт назначения при автономном вождении на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных расписания. После этого, ECU 30 заканчивает этот процесс.
Преимущества системы автономного вождения согласно второму варианту осуществления
[0119] Согласно вышеописанной системе 200 автономного вождения второго варианта осуществления, данные расписания пассажира, прошедшего персональную аутентификацию, получаются из портативного информационного терминала пассажира или информационной сети, и ввиду этого пункт назначения при автономном вождении может задаваться на основе данных расписания пассажира. Следовательно, согласно системе 200 автономного вождения, поскольку пункт назначения при автономном вождении может задаваться на основе данных расписания пассажира, пассажир может автоматически задавать пункт назначения в качестве пункта назначения при автономном вождении посредством регистрации запланированного пункта назначения в данных расписания, и ввиду этого может дополнительно повышаться удобство пассажира относительно задания пункта назначения.
Третий вариант осуществления
[0120] Далее приводится описание системы 300 автономного вождения согласно третьему варианту осуществления. Фиг. 7 является блок-схемой, иллюстрирующей систему 300 автономного вождения согласно третьему варианту осуществления. Система 300 автономного вождения, проиллюстрированная на фиг. 7, отличается от системы автономного вождения первого варианта осуществления тем, что запрос на персональную аутентификацию выполняется посредством использования данных расписаний транспортного средства. На фиг. 7, составляющим элементам, идентичным или соответствующим составляющим элементам первого варианта осуществления, присваиваются идентичные позиционные обозначения, и повторное описание опускается.
Конфигурация системы автономного вождения согласно третьему варианту осуществления
[0121] Как проиллюстрировано на фиг. 7, ECU 40 системы 300 автономного вождения соединяется с базой 41 данных расписаний транспортного средства. ECU 40 включает в себя модуль 42 выдачи запросов на персональную аутентификацию. ECU 40 соединяется с сетевым устройством 32 связи второго варианта осуществления и также включает в себя устройство 34 персональной аутентификации из второго варианта осуществления.
[0122] База 41 данных расписаний транспортного средства представляет собой базу данных, в которой сохраняются данные расписаний транспортного средства. Данные расписаний транспортного средства являются данными относительно расписания, коррелированного с транспортным средством вместо пассажира. В случае если транспортное средство представляет собой, например, служебное транспортное средство, данные расписаний транспортного средства, коррелированные со служебным транспортным средством, расписание использования которого задается заранее, сохраняются в базе 41 данных расписаний транспортного средства. В случае если транспортное средство представляет собой личное транспортное средство, данные расписания владельца транспортного средства могут сохраняться в базе 41 данных расписаний транспортного средства в качестве данных расписаний транспортного средства. Данные расписаний транспортного средства включают в себя период времени использования транспортного средства и информацию персональной аутентификации пассажира (например, водителя). Данные расписаний транспортного средства могут включать в себя запланированный пункт назначения и могут включать в себя состояние пассажира. База 41 данных расписаний транспортного средства может предоставляться на сервере, который может осуществлять связь с транспортным средством.
[0123] Модуль 42 выдачи запросов на персональную аутентификацию выдает запрос на персональную аутентификацию пассажиру (например, водителю) в случае, если запускается двигатель транспортного средства, который не запланирован в данных расписаний транспортного средства из базы 41 данных расписаний транспортного средства. Модуль 42 выдачи запросов на персональную аутентификацию выдает запрос на персональную аутентификацию пассажиру через HMI 7, например, в случае если двигатель транспортного средства запускается в период времени, который не запланирован в данных расписаний транспортного средства.
[0124] Модуль 42 выдачи запросов на персональную аутентификацию может выдавать запрос на персональную аутентификацию пассажиру в случае, если задается пункт назначения, который не запланирован в данных расписаний транспортного средства, и двигатель транспортного средства запускается. Модуль 42 выдачи запросов на персональную аутентификацию может выдавать запрос на персональную аутентификацию пассажиру в случае, если двигатель транспортного средства запускается в состоянии пассажира, которое не запланировано в данных расписаний транспортного средства. Запрос на персональную аутентификацию может выдаваться одному пассажиру и может выдаваться всем пассажирам. В случае если модуль 16 задания пунктов назначения определяет то, что пункт назначения при автономном вождении не может автоматически задаваться, модуль 42 выдачи запросов на персональную аутентификацию может выдавать запрос на персональную аутентификацию пассажиру. Пассажир выполняет персональную аутентификацию посредством использования устройства 34 персональной аутентификации через HMI 7 и т.п. Персональная аутентификация может выполняться через аутентификацию на основе распознавания лиц, которая уменьшает нагрузку на пассажира.
[0125] Модуль 42 выдачи запросов на персональную аутентификацию определяет то, является или нет пассажир, прошедший персональную аутентификацию, человеком, запланированным в данных расписаний транспортного средства. Модуль 42 выдачи запросов на персональную аутентификацию выполняет определение на основе информации персональной аутентификации в устройстве 34 персональной аутентификации и данных расписаний транспортного средства. То, регистрируется или нет пассажир в качестве пользователя транспортного средства заранее, может определяться вместо определения того, является или нет пассажир человеком, запланированным в данных расписаний транспортного средства.
[0126] В случае если модуль 42 выдачи запросов на персональную аутентификацию определяет то, что пассажир, прошедший персональную аутентификацию, является человеком, запланированным в данных расписаний транспортного средства, модуль 42 выдачи запросов на персональную аутентификацию разрешает трогание с места транспортного средства. В случае если модуль 42 выдачи запросов на персональную аутентификацию определяет то, что пассажир, прошедший персональную аутентификацию, не является человеком, запланированным в данных расписаний транспортного средства, модуль 42 выдачи запросов на персональную аутентификацию запрещает трогание с места транспортного средства. Модуль 42 выдачи запросов на персональную аутентификацию передает управляющий сигнал, например, в исполнительное устройство 8, с тем чтобы запрещать трогание с места транспортного средства. Модуль 42 выдачи запросов на персональную аутентификацию отправляет уведомление владельцу транспортного средства через сетевое устройство 32 связи. Модуль 42 выдачи запросов на персональную аутентификацию уведомляет владельца транспортного средства в отношении того, что не запланированный человек пытается трогать с места транспортное средство. Модуль 42 выдачи запросов на персональную аутентификацию может отправлять уведомление целевому человеку для уведомлений, заданному, заранее вместо владельца транспортного средства.
Процессы в системе автономного вождения согласно третьему варианту осуществления
Процесс выдачи запросов на персональную аутентификацию
[0127] Далее приводится описание процесса выдачи запросов на персональную аутентификацию в системе 300 автономного вождения согласно третьему варианту осуществления. Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей процесс выдачи запросов на персональную аутентификацию согласно третьему варианту осуществления. Блок-схема последовательности операций способа, показанная на фиг. 8, выполняется, когда двигатель транспортного средства запускается. Процесс задания пунктов назначения, процесс запуска двигателя и процесс сохранения возможных вариантов пунктов назначения являются идентичными процессам в первом варианте осуществления, и ввиду этого их описание опускается.
[0128] Как проиллюстрировано на фиг. 8, на S60, ECU 40 системы 300 автономного вождения инструктирует модулю 42 выдачи запросов на персональную аутентификацию определять то запускается или нет двигатель транспортного средства, который не запланирован в данных расписаний транспортного средства. В случае если модуль 42 выдачи запросов на персональную аутентификацию определяет то, что двигатель транспортного средства, который не запланирован в данных расписаний транспортного средства, не запускается (S60: "Нет"), ECU 40 заканчивает этот процесс. В случае если модуль 42 выдачи запросов на персональную аутентификацию определяет то, что двигатель транспортного средства, который не запланирован в данных расписаний транспортного средства, запускается (S60: "Да"), ECU 40 переходит к S62.
[0129] На S62, ECU 40 инструктирует модулю 42 выдачи запросов на персональную аутентификацию выдавать запрос на персональную аутентификацию пассажиру. Модуль 42 выдачи запросов на персональную аутентификацию выдает запрос на персональную аутентификацию пассажиру через HMI 7. Пассажир выполняет персональную аутентификацию посредством использования устройства 34 персональной аутентификации через HMI 7 и т.п.
[0130] На S64, ECU 40 инструктирует модулю 42 выдачи запросов на персональную аутентификацию определять то, является или нет пассажир, прошедший персональную аутентификацию, человеком, запланированным в данных расписаний транспортного средства. В случае если модуль 42 выдачи запросов на персональную аутентификацию определяет то, что пассажир, прошедший персональную аутентификацию, не является человеком, запланированным в данных расписаний транспортного средства (S64: "Нет"), ECU 40 переходит к S66. В случае если модуль 42 выдачи запросов на персональную аутентификацию определяет то, что пассажир, прошедший персональную аутентификацию, является человеком, запланированным в данных расписаний транспортного средства (S64: "Да"), ECU 40 переходит к S68.
[0131] На S66, ECU 40 инструктирует модулю 42 выдачи запросов на персональную аутентификацию запрещать трогание с места транспортного средства и также отправлять уведомление владельцу транспортного средства. Модуль 42 выдачи запросов на персональную аутентификацию передает управляющий сигнал, например, в исполнительное устройство 8, с тем чтобы запрещать трогание с места транспортного средства и также останавливать двигатель транспортного средства. Модуль 42 выдачи запросов на персональную аутентификацию отправляет уведомление владельцу транспортного средства через сетевое устройство 32 связи. После этого, ECU 40 заканчивает этот процесс.
[0132] На S68, ECU 40 инструктирует модулю 42 выдачи запросов на персональную аутентификацию разрешать трогание с места транспортного средства. После этого, ECU 40 заканчивает этот процесс.
Преимущества системы автономного вождения согласно третьему варианту осуществления
[0133] Согласно вышеописанной системе 300 автономного вождения третьего варианта осуществления, в случае если двигатель транспортного средства, который не запланирован в данных расписаний транспортного средства, запускается, имеется очень высокая вероятность того, что может управляться ненадлежащее транспортное средство, и ввиду этого дополнительно может обеспечиваться содействие в повышении безопасности транспортного средства посредством выполнения запроса на предмет персональной аутентификации.
Четвертый вариант осуществления
[0134] Далее приводится описание системы 400 автономного вождения согласно четвертому варианту осуществления. Фиг. 9 является блок-схемой, иллюстрирующей систему 400 автономного вождения согласно четвертому варианту осуществления. Система 400 автономного вождения отличается от системы автономного вождения первого варианта осуществления тем, что разрешение для представленного возможного варианта пункта назначения получается от пассажира вместо автоматического задания пункта назначения при автономном вождении. На фиг. 9, составляющим элементам, идентичным или соответствующим составляющим элементам первого варианта осуществления и второго варианта осуществления, присваиваются идентичные позиционные обозначения, и повторное описание опускается.
Конфигурация системы автономного вождения согласно четвертому варианту осуществления
[0135] Как проиллюстрировано на фиг. 9, ECU 50 системы 400 автономного вождения согласно четвертому варианту осуществления включает в себя модуль 51 представления возможных вариантов пунктов назначения, модуль 52 определения и модуль 53 задания пунктов назначения.
[0136] Модуль 51 представления возможных вариантов пунктов назначения представляет по меньшей мере один возможный вариант пункта назначения пассажиру транспортного средства в случае, если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство находится в состоянии завершения посадки. Модуль 51 представления возможных вариантов пунктов назначения представляет возможный вариант пункта назначения пассажиру посредством использования по меньшей мере одного из отображения изображений и речевого вывода через HMI 7.
[0137] Модуль 51 представления возможных вариантов пунктов назначения представляет возможный вариант пункта назначения при автономном вождении на основе текущего времени, позиции транспортного средства на карте в устройстве 11 получения позиции транспортного средства, состояния пассажира в устройстве 14 получения состояний пассажира и данных возможных вариантов пунктов назначения в базе 6 данных возможных вариантов пунктов назначения. В частности, в случае если "домой" в качестве позиции на транспортном средстве на карте, "один мужчина" в качестве состояния пассажира и "между 7:00 и 8:00 утром в рабочие дни" в качестве времени коррелируются в качестве требований с "компанией A", которая представляет собой возможный вариант пункта назначения в данных возможных вариантов пунктов назначения, модуль 51 представления возможных вариантов пунктов назначения представляет "компанию A" в качестве возможного варианта пункта назначения при автономном вождении, когда текущее время представляет собой "между 7:00 и 8:00 утром в рабочие дни", позиция транспортного средства на карте представляет собой "домой", и состояние пассажира представляет собой "один мужчина".
[0138] В случае если множество возможных вариантов пунктов назначения, совпадающих с требованиями текущего времени, позиции транспортного средства на карте и состояния пассажира, присутствуют в данных возможных вариантов пунктов назначения, модуль 51 представления возможных вариантов пунктов назначения представляет возможные варианты пунктов назначения пассажиру. Модуль 51 представления возможных вариантов пунктов назначения может представлять все возможные варианты пунктов назначения, совпадающие с требованием по меньшей мере одного из текущего времени, позиции транспортного средства на карте и состояния пассажира, пассажиру. Определение совпадения с требованием может выполняться таким же образом, как в модуле 16 задания пунктов назначения первого варианта осуществления.
[0139] Модуль 52 определения определяет то, разрешается или нет возможный вариант пункта назначения, представленный посредством модуля 51 представления возможных вариантов пунктов назначения, пассажиром. Модуль 52 определения определяет то, разрешается или нет возможный вариант пункта назначения пассажиром, на основе результата, который вводится в HMI 7 пассажиром. В итоге может разрешаться один возможный вариант пункта назначения. В случае если возможный вариант пункта назначения представляется посредством модуля 51 представления возможных вариантов пунктов назначения, и затем отсутствует ввод от пассажира даже после того, как предварительно определенное время истекает, модуль 52 определения может определять то, что возможный вариант пункта назначения не разрешается пассажиром.
[0140] В случае если модуль 52 определения определяет то, что возможный вариант пункта назначения разрешается пассажиром, модуль 53 задания пунктов назначения задает возможный вариант пункта назначения, разрешенный пассажиром, в качестве пункта назначения при автономном вождении. В случае если модуль 52 определения определяет то, что возможный вариант пункта назначения не разрешается пассажиром, модуль 53 задания пунктов назначения запрашивает пассажира на предмет того, чтобы задавать пункт назначения. Модуль 53 задания пунктов назначения запрашивает пассажира на предмет того, чтобы задавать пункт назначения через HMI 7. Модуль 53 задания пунктов назначения задает пункт назначения при автономном вождении на основе результата, который вводится в HMI 7 пассажиром.
Процессы в системе автономного вождения согласно четвертому варианту осуществления
[0141] Далее приводится описание процессов в системе 400 автономного вождения согласно четвертому варианту осуществления. В данном документе, приводится описание процесса представления возможных вариантов пунктов назначения и процесса задания пунктов назначения. Процесс запуска двигателя и процесс сохранения возможных вариантов пунктов назначения являются идентичными процессам в первом варианте осуществления, и ввиду этого их описание опускается.
Процесс представления возможных вариантов пунктов назначения
[0142] Фиг. 10A является блок-схемой последовательности операций способа, иллюстрирующей процесс представления возможных вариантов пунктов назначения согласно четвертому варианту осуществления. Блок-схема последовательности операций способа, показанная на фиг. 10A, выполняется, когда начинается автономное вождение.
[0143] Как проиллюстрировано на фиг. 10A, на S70, ECU 50 системы 400 автономного вождения инструктирует модулю 15 определения состояния завершения посадки определять то, находится или нет транспортное средство в состоянии завершения посадки. Модуль 15 определения состояния завершения посадки выполняет определение на основе состояния транспортного средства в устройстве 13 получения состояний транспортного средства и состояния пассажира в устройстве 14 получения состояний пассажира. В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство не находится в состоянии завершения посадки (S70: "Нет"), ECU 50 заканчивает этот процесс. После этого, ECU 50 выполняет процесс на S70 снова после того, как истекает предварительно определенное время. В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство находится в состоянии завершения посадки (S70: "Да"), ECU 50 переходит к S72.
[0144] На S72, ECU 50 инструктирует модулю 51 представления возможных вариантов пунктов назначения представлять по меньшей мере один вариант пункта назначения пассажиру транспортного средства. Модуль 51 представления возможных вариантов пунктов назначения представляет возможный вариант пункта назначения при автономном вождении на основе текущего времени, позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения. После этого, ECU 50 заканчивает этот процесс и выполняет следующий процесс задания пунктов назначения.
Процесс задания пунктов назначения
[0145] Фиг. 10B является блок-схемой последовательности операций способа, иллюстрирующей процесс задания пунктов назначения согласно четвертому варианту осуществления. Блок-схема последовательности операций способа, показанная на фиг. 10B, выполняется, когда выполняется S72 на фиг. 10A.
[0146] Как проиллюстрировано на фиг. 10B, на S80, ECU 50 инструктирует модулю 52 определения определять то, разрешается или нет возможный вариант пункта назначения пассажиром. Модуль 52 определения выполняет определение на основе результата, который вводится в HMI 7 пассажиром. В случае если модуль 52 определения определяет то, что возможный вариант пункта назначения разрешается пассажиром (S80: "Да"), ECU 50 переходит к S82. В случае если модуль 52 определения определяет то, что возможный вариант пункта назначения не разрешается пассажиром (S80: "Нет"), ECU 50 переходит к S84.
[0147] На S82, ECU 50 инструктирует модулю 53 задания пунктов назначения задавать пункт назначения при автономном вождении. Модуль 53 задания пунктов назначения задает возможный вариант пункта назначения, разрешенный пассажиром, в качестве пункта назначения при автономном вождении. После этого, ECU 50 заканчивает этот процесс.
[0148] На S84, ECU 50 запрашивает пассажира на предмет того, чтобы задавать пункт назначения с помощью модуля 53 задания пунктов назначения. Модуль 53 задания пунктов назначения запрашивает пассажира на предмет того, чтобы задавать пункт назначения через HMI 7. На S86, ECU 50 задает пункт назначения при автономном вождении на основе результата, который вводится в HMI 7 пассажиром, с помощью модуля 53 задания пунктов назначения. После этого, ECU 50 заканчивает этот процесс.
Преимущества системы автономного вождения согласно четвертому варианту осуществления
[0149] Согласно вышеописанной системе 400 автономного вождения четвертого варианта осуществления, в случае если транспортное средство определяется как находящееся в состоянии завершения посадки, по меньшей мере один возможный вариант пункта назначения может представляться пассажиру, и возможный вариант пункта назначения, разрешенный пассажиром, может задаваться в качестве пункта назначения при автономном вождении, на основе позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения. Согласно системе 400 автономного вождения, поскольку возможный вариант пункта назначения на основе состояния пассажира может представляться с учетом взаимосвязи между состоянием пассажира и пунктом назначения при автономном вождении транспортного средства, может повышаться точность представления возможного варианта пункта назначения, требуемая пассажиром, и ввиду этого может дополнительно повышаться удобство пассажира относительно задания пункта назначения.
[0150] Согласно системе 400 автономного вождения, возможный вариант пункта назначения при автономном вождении может представляться на основе часов-пик при езде на работу и часов посещения школы дополнительно с учетом текущего времени при автоматическом задании пункта назначения.
[0151] Согласно системе 400 автономного вождения, поскольку модуль 21 определения разрешений на хранение предоставляется идентично первому варианту осуществления, и модуль 21 определения разрешений на хранение сохраняет пункт назначения, разрешенный пассажиром, в базе 6 данных возможных вариантов пунктов назначения, можно не допускать включения несоответствующего возможного варианта пункта назначения в данные возможных вариантов пунктов назначения.
[0152] Согласно системе 400 автономного вождения, модуль 17 определения условий запуска двигателя и модуль 18 запуска двигателя предоставляются идентично первому варианту осуществления, и в случае, если транспортное средство переводится в состояние завершения посадки в ходе остановки двигателя транспортного средства, и условие запуска двигателя определяется как удовлетворяемое, двигатель транспортного средства автоматически запускается, и ввиду этого может значительно повышаться удобство относительно запуска двигателя пассажира.
Пятый вариант осуществления
[0153] Далее приводится описание системы 500 автономного вождения согласно пятому варианту осуществления. Фиг. 11 является блок-схемой, иллюстрирующей систему 500 автономного вождения согласно пятому варианту осуществления. Система 500 автономного вождения, проиллюстрированная на фиг. 11, отличается от системы автономного вождения четвертого варианта осуществления тем, что по меньшей мере одно из возможного варианта пункта назначения и запланированного пункта назначения при автономном вождении представляется на основе данных расписания пассажира. На фиг. 11, составляющим элементам, идентичным или соответствующим составляющим элементам первого варианта осуществления, второго варианта осуществления и четвертого варианта осуществления, присваиваются идентичные позиционные обозначения, и повторное описание опускается.
Конфигурация системы автономного вождения согласно пятому варианту осуществления
[0154] Как проиллюстрировано на фиг. 11, ECU 60 системы 500 автономного вождения согласно пятому варианту осуществления соединяется с терминальным устройством 31 связи, сетевым устройством 32 связи и базой 33 данных приоритезации второго варианта осуществления. ECU 60 включает в себя устройство 34 персональной аутентификации и модуль 35 получения данных расписания.
[0155] В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство находится в состоянии завершения посадки, модуль 61 представления возможных вариантов пунктов назначения ECU 60 представляет по меньшей мере одно из возможного варианта пункта назначения и запланированного пункта назначения пассажиру транспортного средства на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных расписания пассажира, полученных посредством модуля 35 получения данных расписания.
[0156] Во-первых, приводится описание случая, в котором элементы данных расписания одного пассажира получаются посредством модуля 35 получения данных расписания. Модуль 61 представления возможных вариантов пунктов назначения получает запланированный пункт назначения (запланированный пункт назначения, коррелированный с расписанием в одну единицу времени после текущего времени), в который транспортное средство должно направляться далее в данный момент времени, из данных расписания пассажира. Модуль 61 представления возможных вариантов пунктов назначения получает возможный вариант пункта назначения, совпадающий с требованием по меньшей мере одного из текущего времени, позиции транспортного средства на карте и состояния пассажира из данных возможных вариантов пунктов назначения на основе текущего времени, позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения. Модуль 61 представления возможных вариантов пунктов назначения представляет полученный возможный вариант пункта назначения и запланированный пункт назначения пассажиру.
[0157] Модуль 61 представления возможных вариантов пунктов назначения может определять правильность данных расписания пассажира. В случае если модуль 61 представления возможных вариантов пунктов назначения вычисляет время прибытия, в которое транспортное средство прибывает в запланированный пункт назначения, в данных расписания пассажира в автономном режиме вождения, и время прибытия представляет собой время позднее запланированного времени, коррелированного с запланированным пунктом назначения в данных расписания, модуль 61 представления возможных вариантов пунктов назначения определяет то, что данные расписания являются надлежащими. В случае если время прибытия для запланированного пункта назначения представляет собой время раньше запланированного времени, модуль 61 представления возможных вариантов пунктов назначения определяет то, что данные расписания не являются надлежащими.
В случае если модуль 61 представления возможных вариантов пунктов назначения определяет то, что данные расписания не являются надлежащими, модуль 61 представления возможных вариантов пунктов назначения не представляет запланированный пункт назначения в данных расписания, которые не являются надлежащими для пассажира.
[0158] Далее приводится описание случая, в котором данные расписания множества пассажиров получаются посредством модуля 35 получения данных расписания. В случае если элементы данных расписания множества пассажиров получаются посредством модуля 35 получения данных расписания, модуль 61 представления возможных вариантов пунктов назначения представляет по меньшей мере одно из возможного варианта пункта назначения и запланированного пункта назначения пассажиру на основе данных приоритезации в базе 33 данных приоритезации в дополнение к текущему времени, позиции транспортного средства на карте, состоянию пассажира, данным возможных вариантов пунктов назначения и данным расписания пассажиров.
[0159] Модуль 61 представления возможных вариантов пунктов назначения получает соответствующие запланированные пункты назначения, в которые транспортное средство должно направляться далее в данный момент времени, из элементов данных расписания пассажиров. Модуль 61 представления возможных вариантов пунктов назначения применяет приоритет к полученным запланированным пунктам назначения на основе данных приоритезации.
[0160] В случае если запланированные пункты назначения совпадают между собой, модуль 61 представления возможных вариантов пунктов назначения усиливает приоритет совпадающих запланированных пунктов назначения по сравнению со случаем, в котором запланированные пункты назначения не совпадают между собой. Модуль 61 представления возможных вариантов пунктов назначения может вычислять время прибытия транспортного средства в автономном режиме вождения для каждого запланированного пункта назначения и может применять приоритет к запланированному пункту назначения на основе взаимосвязи между запланированным временем для запланированного пункта назначения и временем прибытия. В этом случае, модуль 61 представления возможных вариантов пунктов назначения понижает приоритет запланированного пункта назначения, для которого время прибытия составляет предварительно определенное время или более до запланированного времени либо предварительно определенное время или более после запланированного времени, по сравнению с запланированным пунктом назначения, для которого время прибытия составляет около запланированного времени (в пределах предварительно определенного времени после запланированного времени).
[0161] Модуль 61 представления возможных вариантов пунктов назначения представляет запланированный пункт назначения, приоритет которого, в общем, равен или превышает пороговое значение приоритета, и полученный возможный вариант пункта назначения пассажиру. Пороговое значение приоритета является предварительно установленным пороговым значением. Модуль 61 представления возможных вариантов пунктов назначения может представлять все запланированные пункты назначения пассажиру без применения приоритета к запланированным пунктам назначения.
Процессы в системе автономного вождения согласно пятому варианту осуществления
Процесс представления возможных вариантов пунктов назначения
[0162] Далее приводится описание процесса представления возможных вариантов пунктов назначения в системе 500 автономного вождения согласно пятому варианту осуществления. Фиг. 12 является блок-схемой последовательности операций способа, иллюстрирующей процесс представления возможных вариантов пунктов назначения согласно пятому варианту осуществления. Блок-схема последовательности операций способа, показанная на фиг. 12, выполняется, когда начинается автономное вождение. Процесс запуска двигателя, процесс сохранения возможных вариантов пунктов назначения и процесс задания пунктов назначения являются идентичными процессам в четвертом варианте осуществления, и ввиду этого их описание опускается.
[0163] Как проиллюстрировано на фиг. 12, на S90, ECU 60 системы 500 автономного вождения инструктирует модулю 15 определения состояния завершения посадки определять то, находится или нет транспортное средство в состоянии завершения посадки. Модуль 15 определения состояния завершения посадки выполняет определение на основе состояния транспортного средства в устройстве 13 получения состояний транспортного средства и состояния пассажира в устройстве 14 получения состояний пассажира. В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство не находится в состоянии завершения посадки (S90: "Нет"), ECU 60 заканчивает этот процесс. После этого, ECU 60 выполняет процесс на S90 снова после того, как истекает предварительно определенное время. В случае если модуль 15 определения состояния завершения посадки определяет то, что транспортное средство находится в состоянии завершения посадки (S90: "Да"), ECU 60 переходит к S92.
[0164] На S92, ECU 60 инструктирует устройству 34 персональной аутентификации выполнять персональную аутентификацию пассажира, а модулю 35 получения данных расписания - получать данные расписания пассажира. Модуль 35 получения данных расписания получает данные расписания пассажира из портативного информационного терминала, носимого пассажиром, через терминальное устройство 31 связи. Модуль 35 получения данных расписания получает данные расписания пассажира, прошедшего персональную аутентификацию с использованием устройства 34 персональной аутентификации, из сервера по беспроводной сети через сетевое устройство 32 связи.
[0165] На S94, ECU 60 инструктирует модулю 61 представления возможных вариантов пунктов назначения определять то, получаются или нет элементы данных расписания множества пассажиров. В случае если модуль 61 представления возможных вариантов пунктов назначения определяет то, что элементы данных расписания пассажиров получаются (S94: "Да"), ECU 60 переходит к S96. В случае если модуль 61 представления возможных вариантов пунктов назначения определяет то, что элементы данных расписания пассажиров не получаются (S94: "Нет"), ECU 60 переходит к S98.
[0166] На S96, ECU 60 инструктирует модулю 61 представления возможных вариантов пунктов назначения выбирать запланированный пункт назначения. Модуль 61 представления возможных вариантов пунктов назначения применяет приоритет ко множеству запланированных пунктов назначения для времен данных расписания пассажиров на основе данных приоритезации и выбирает запланированный пункт назначения, приоритет которого, в общем, равен или превышает предварительно определенное пороговое значение приоритета.
[0167] На S98, ECU 60 инструктирует модулю 61 представления возможных вариантов пунктов назначения представлять возможный вариант пункта назначения и запланированный пункт назначения пассажиру. Модуль 61 представления возможных вариантов пунктов назначения представляет по меньшей мере одно из возможного варианта пункта назначения и запланированного пункта назначения пассажиру через HMI 7. После этого, ECU 60 заканчивает этот процесс.
Преимущества системы автономного вождения согласно пятому варианту осуществления
[0168] Согласно вышеописанной системе 500 автономного вождения пятого варианта осуществления, данные расписания пассажира получаются из портативного информационного терминала пассажира или информационной сети, и ввиду этого пункт назначения при автономном вождении может задаваться на основе данных расписания пассажира. Следовательно, согласно системе 500 автономного вождения, возможный вариант пункта назначения и запланированный пункт назначения при автономном вождении могут представляться на основе данных расписания пассажира и ввиду этого могут представляться во время задания пункта назначения пассажиром, регистрирующим запланированный пункт назначения в данных расписания, так что может дополнительно повышаться удобство пассажира относительно задания пункта назначения.
[0169] Согласно системе 500 автономного вождения, в случае если получаются элементы данных расписания множества пассажиров, запланированные пункты назначения в элементах данных расписания пассажиров могут быть надлежащим образом приоритезированы, и возможный вариант пункта назначения при автономном вождении может представляться на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных приоритезации, заданных заранее.
[0170] Описаны варианты осуществления изобретения, но изобретение не ограничено вариантами осуществления. Изобретение может быть реализовано в различных формах, к которым применяются различные модификации и изменения на основе не только вышеописанных вариантов осуществления, но также и знаний специалистов в данной области техники.
[0171] В системе автономного вождения согласно первому-пятому вариантам осуществления, запуск автономного вождения не ограничен операцией начала автономного вождения пассажира. В системе автономного вождения, в случае если пассажир разрешает запуск автономного вождения заранее, автономное вождение транспортного средства может автоматически начинаться, когда удовлетворяется предварительно определенное условие начала автономного вождения.
[0172] Система 100 автономного вождения согласно первому варианту осуществления может задавать пункт назначения при автономном вождении без учета текущего времени. Другими словами, модуль 16 задания пунктов назначения может задавать пункт назначения при автономном вождении на основе позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения. Модуль 16 задания пунктов назначения может задавать пункт назначения при автономном вождении на основе позиции транспортного средства на карте и состояния пассажира (например, присутствия или отсутствия посадки подопечного) в транспортном средстве, к примеру, в транспортном средстве, применение для обслуживания которого ограничивается. В этом случае, возможный вариант пункта назначения не должен коррелироваться со временем в базе 6 данных возможных вариантов пунктов назначения. Система 400 автономного вождения согласно четвертому варианту осуществления также может представлять возможный вариант пункта назначения пассажиру без учета текущего времени. Модуль 51 представления возможных вариантов пунктов назначения может представлять возможный вариант пункта назначения на основе позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения.
[0173] Система 100 автономного вождения согласно первому варианту осуществления может не включать в себя модуль 17 определения условий запуска двигателя и модуль 18 запуска двигателя. Система 100 автономного вождения не должна обязательно автоматически запускать двигатель транспортного средства. Это также идентичным для системы 400 автономного вождения согласно четвертому варианту осуществления.
[0174] Система 100 автономного вождения согласно первому варианту осуществления может не включать в себя модуль 21 определения разрешений на хранение и модуль 22 распознавания пунктов назначения. Система 100 автономного вождения может выполнять коррекцию, добавление и т.п. данных возможных вариантов пунктов назначения только в случае, если пассажир выполняет задание вручную без автоматического распознавания в отношении данных возможных вариантов пунктов назначения. Это также идентичным для системы 400 автономного вождения согласно четвертому варианту осуществления.
[0175] Система 400 автономного вождения согласно четвертому варианту осуществления может включать в себя сетевое устройство 32 связи и устройство 34 персональной аутентификации из второго варианта осуществления и базу 41 данных расписаний транспортного средства и модуль 42 выдачи запросов на персональную аутентификацию из третьего варианта осуществления. Другими словами, в системе 400 автономного вождения согласно четвертому варианту осуществления, в случае если предусмотрен запуск двигателя, который не запланирован в данных расписаний транспортного средства, запрос на персональную аутентификацию может выдаваться пассажиру.
[0176] Система 200 автономного вождения согласно второму варианту осуществления может не включать в себя как терминальное устройство 31 связи, так и сетевое устройство 32 связи и устройство 34 персональной аутентификации. Модуль 35 получения данных расписания может получать данные расписания пассажира из любого из портативного информационного терминала и информационной сети. Это также идентичным для системы 500 автономного вождения согласно пятому варианту осуществления.
[0177] Система 200 автономного вождения согласно второму варианту осуществления может не определять то, получаются или нет элементы данных расписания множества пассажиров. Система 200 автономного вождения согласно второму варианту осуществления может нормально использовать только данные расписания водителя. Это также идентичным для системы 500 автономного вождения согласно пятому варианту осуществления.
[0178] В базе 6 данных возможных вариантов пунктов назначения, возможный вариант пункта назначения может не коррелироваться с позицией транспортного средства на карте. В этом случае, модуль 16, 36 задания пунктов назначения получает взаимосвязь между позицией транспортного средства на карте (текущей позицией транспортного средства на карте) и позицией, в которой расположен возможный вариант пункта назначения. Другими словами, например, в случае если расстояние является слишком большим (возможный вариант пункта назначения находится на предварительно определенном расстоянии или более, к примеру, 100 км), или текущая позиция транспортного средства на карте представляет собой позицию, в которой расположен возможный вариант пункта назначения, модуль 16, 36 задания пунктов назначения не задает возможный вариант пункта назначения в качестве пункта назначения при автономном вождении. Аналогично, в случае если расстояние является слишком большим, или текущая позиция транспортного средства на карте представляет собой позицию, в которой расположен возможный вариант пункта назначения, модуль 51, 61 представления возможных вариантов пунктов назначения не представляет возможный вариант пункта назначения пассажиру.
[0179] Модуль 15 определения состояния завершения посадки может определять то, находится или нет транспортное средство в состоянии завершения посадки, в случае если дверь открывается и закрывается, вместо начала автономного вождения. Пункт назначения при автономном вождении может задаваться заранее в модуле задания пунктов назначения согласно первому-третьему вариантам осуществления до того, как начинается автономное вождение. Состояние пассажира может не включать в себя позицию сидения пассажира.
[0180] Модуль 15 определения состояния завершения посадки может определять то, находится или нет транспортное средство в состоянии завершения посадки, независимо от начала автономного вождения. Модуль 15 определения состояния завершения посадки может определять то, находится или нет транспортное средство в состоянии завершения посадки, например, в случае если открытие и закрытие двери транспортного средства обнаруживаются в то время, когда транспортное средство останавливается или паркуется.
[0181] Устройство 14 получения состояний пассажира может получать позицию сидения пассажира посредством получения информации позиции портативного информационного терминала пассажира через терминальное устройство 31 связи. Модуль 15 определения состояния завершения посадки может определять то, что транспортное средство находится в состоянии завершения посадки, на основе окружающей среды транспортного средства и состояния транспортного средства в случае, если внешний объект транспортного средства не обнаруживается, и дверь открывается и закрывается. Модуль 15 определения состояния завершения посадки может определять то, что транспортное средство находится в состоянии завершения посадки в случае, если дверь транспортного средства открывается и закрывается, и затем вес обнаруживается на сиденье транспортного средства.
[0182] Модуль 16 задания пунктов назначения может не определять то, может или нет автоматически задаваться пункт назначения. В случае если ни одно из требований, коррелированных с возможными вариантами пунктов назначения, включенными в данные возможных вариантов пунктов назначения, не совпадает с требованиями текущего времени, позиции транспортного средства на карте и состояния пассажира, когда требования сравниваются между собой, модуль 16 задания пунктов назначения может автоматически задавать "домой" в качестве пункта назначения при автономном вождении. Модуль 36 задания пунктов назначения также может не определять то, может или нет автоматически задаваться пункт назначения. Модуль 36 задания пунктов назначения может автоматически задавать "домой" в качестве пункта назначения при автономном вождении в случае, если соответствующий возможный вариант пункта назначения не включен в данные возможных вариантов пунктов назначения, и данные расписания пассажира не могут получаться, как описано выше (или в случае, если расписания после текущего времени не включены в данные расписания). Модуль 16, 36 задания пунктов назначения может задавать пункт назначения при автономном вождении на основе данных расписаний транспортного средства.
[0183] Модуль 16 задания пунктов назначения может учитывать частоту прибытия, с которой транспортное средство прибывает к месту назначения в автономном режиме вождения, когда возможный вариант пункта назначения задается в качестве пункта назначения при автономном вождении. Модуль 16 задания пунктов назначения задает пункт назначения при автономном вождении на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, частоты прибытия и данных возможных вариантов пунктов назначения. В этом случае, частота прибытия сохраняется в базе 6 данных возможных вариантов пунктов назначения в корреляции с возможным вариантом пункта назначения.
[0184] В случае если пункт назначения при автономном вождении задается, модуль 16 задания пунктов назначения может задавать пункт назначения обратного маршрута. В случае если пункт назначения при автономном вождении представляет собой "супермаркет", и состояние пассажира представляет собой "одна женщина", модуль 16 задания пунктов назначения может задавать "домой", соответствующий возможному варианту пункта назначения обратного маршрута, в качестве пункта назначения при автономном вождении. В случае если возможный вариант пункта назначения без обратного маршрута задается в качестве пункта назначения при автономном вождении, модуль 16 задания пунктов назначения может автоматически задавать обратный маршрут. Возможный вариант пункта назначения без обратного маршрута, например, представляет собой инфраструктурный объект для ночевки, такой как дом, вилла или отель. В случае если дом расположен в пределах предварительно определенного расстояния даже в возможном варианте пункта назначения без обратного маршрута, модуль 16 задания пунктов назначения может задавать "домой" в качестве пункта назначения обратного маршрута.
[0185] Устройство 13 получения состояний транспортного средства может получать открытые/закрытые состояния капота и порта маслозаливной горловины бака транспортного средства в качестве состояния транспортного средства. Устройство 13 получения состояний транспортного средства может получать объем топлива (объем бензина, объем водорода или величину электроэнергии) транспортного средства в качестве состояния транспортного средства. Модуль 17 определения условий запуска двигателя может включать в себя закрытое состояние капота и порта маслозаливной горловины бака транспортного средства в условии запуска двигателя. Модуль 17 определения условий запуска двигателя может включать в себя состояние, в котором объем топлива транспортного средства, в общем, равен или превышает предварительно определенное пороговое значение в условии запуска двигателя.
[0186] Модуль 17 определения условий запуска двигателя может определять то, удовлетворяется или нет условие запуска двигателя, на основе состояния транспортного средства и окружающей среды транспортного средства. Модуль 17 определения условий запуска двигателя может включать в себя состояние, в котором отсутствует объект около глушителя транспортного средства в условии запуска двигателя. Модуль 17 определения условий запуска двигателя может включать в себя состояние, в котором отсутствует объект в пределах предварительно определенного расстояния от транспортного средства в условии запуска двигателя. Модуль 17 определения условий запуска двигателя может включать в себя состояние, в котором задается пункт назначения при автономном вождении, и маршрут в пункт назначения вычисляется в условии запуска двигателя.
[0187] Модуль 17 определения условий запуска двигателя может включать в себя состояние, в котором алкоголь определяется как не обнаруженный в тесте на содержание алкоголя, в условии запуска двигателя. Модуль 17 определения условий запуска двигателя может включать в себя состояние, в которое ETC-карта, имеющая условие проверки достоверности, надлежащим образом вставляется в бортовое устройство, когда имеется электронная система взимания платы за проезд (ETC) по маршруту в пункт назначения.
[0188] Контроллер 20 транспортного средства может автоматизировать переключение передач, стеклоочиститель, передние фары и лампу сигнала аварийной остановки транспортного средства. Контроллер 20 транспортного средства может автоматически выполнять переключение передач в случае, если удовлетворяется предварительно определенное условие, такое как время трогания с места транспортного средства. Контроллер 20 транспортного средства может автоматически переводить стеклоочиститель и передние фары в автоматическое состояние, когда автономное вождение начинается даже в случае, если стеклоочиститель и передние фары находятся в состоянии выключенного питания. Контроллер 20 транспортного средства может автоматически отключать подсветку лампы сигнала аварийной остановки, когда транспортное средство трогается с места в автономном режиме вождения после остановки на краю дороги.
[0189] Каждая база данных может быть сконфигурирована на съемном носителе, который может выниматься из транспортного средства, и может быть сконфигурирована в облаке.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ГЕНЕРАЦИИ ЦЕЛЕВОГО ПУТИ ДЛЯ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2731823C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЖДЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЖДЕНИЕМ | 2017 |
|
RU2727907C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЖДЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЖДЕНИЕМ | 2017 |
|
RU2727085C1 |
| СИСТЕМА ОГРАНИЧЕНИЯ ДЕЙСТВИЙ ПРИ ВОЖДЕНИИ | 2020 |
|
RU2817437C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2673227C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ОБНОВЛЕНИЯ КАРТ | 2016 |
|
RU2642547C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗАЦИИ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПАССАЖИРСКИХ ПЕРЕВОЗОК | 2022 |
|
RU2784825C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НЕПРАВИЛЬНОГО РАСПОЗНАВАНИЯ | 2016 |
|
RU2645388C2 |
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ | 2017 |
|
RU2683899C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2668138C1 |
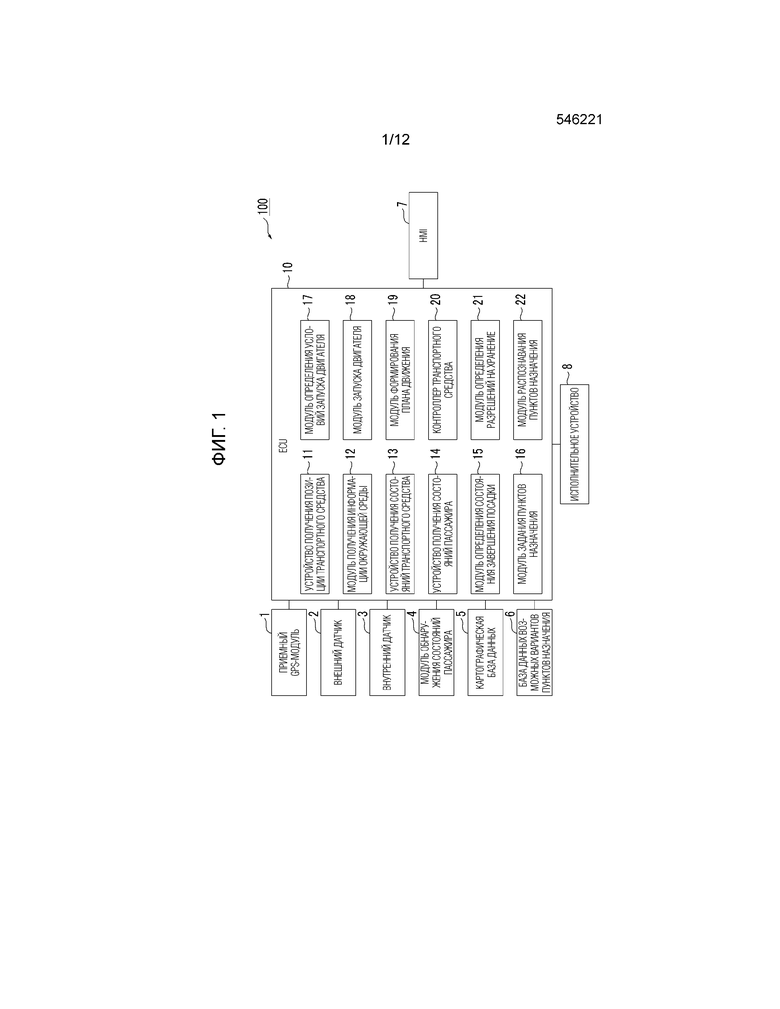
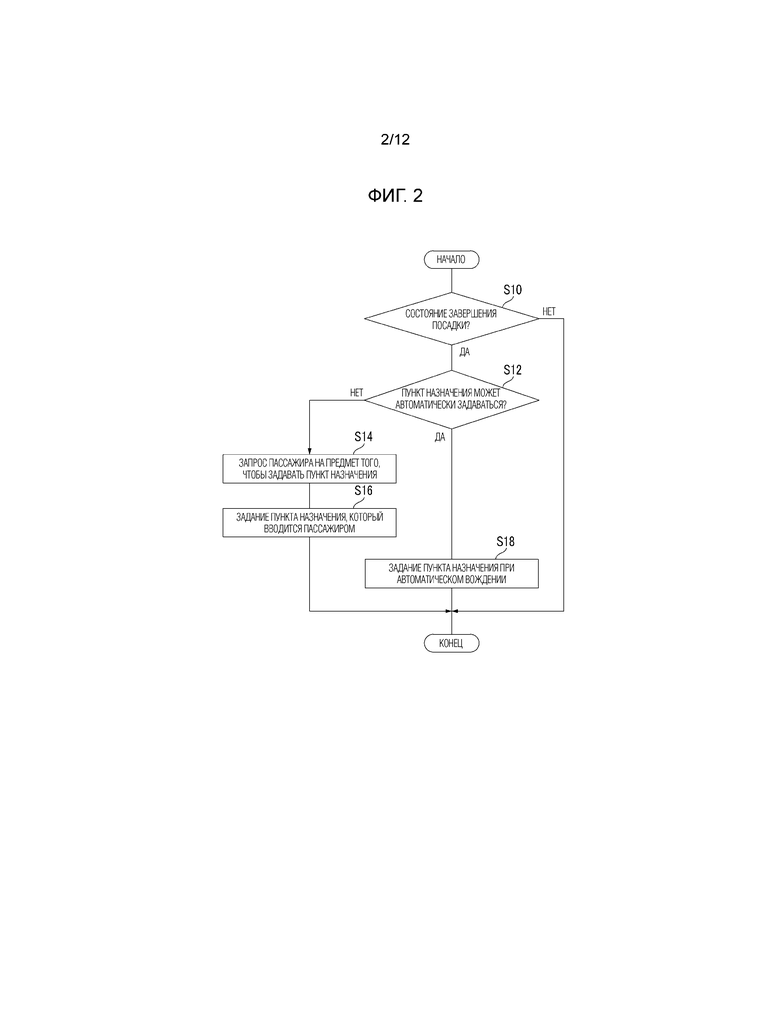
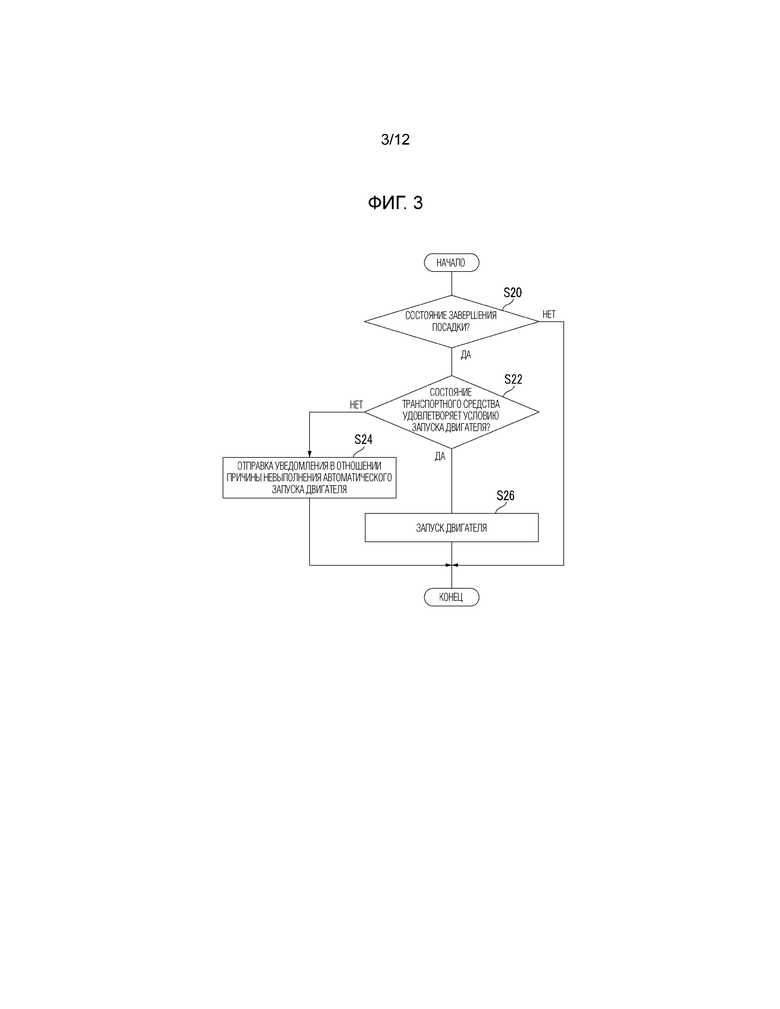
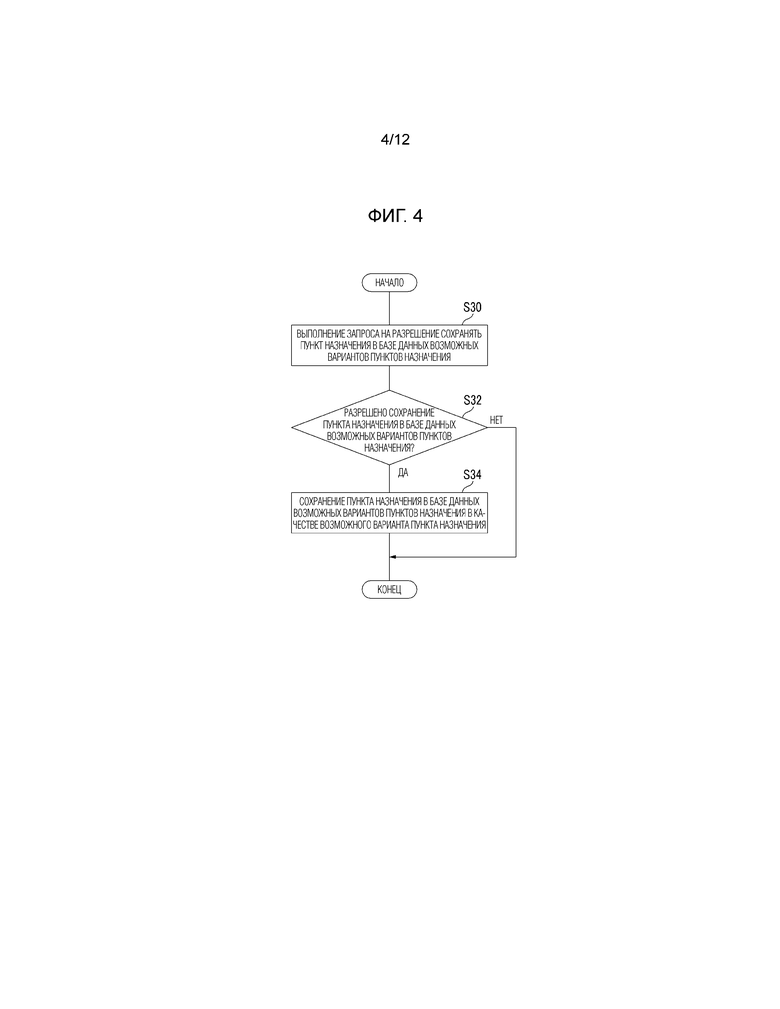
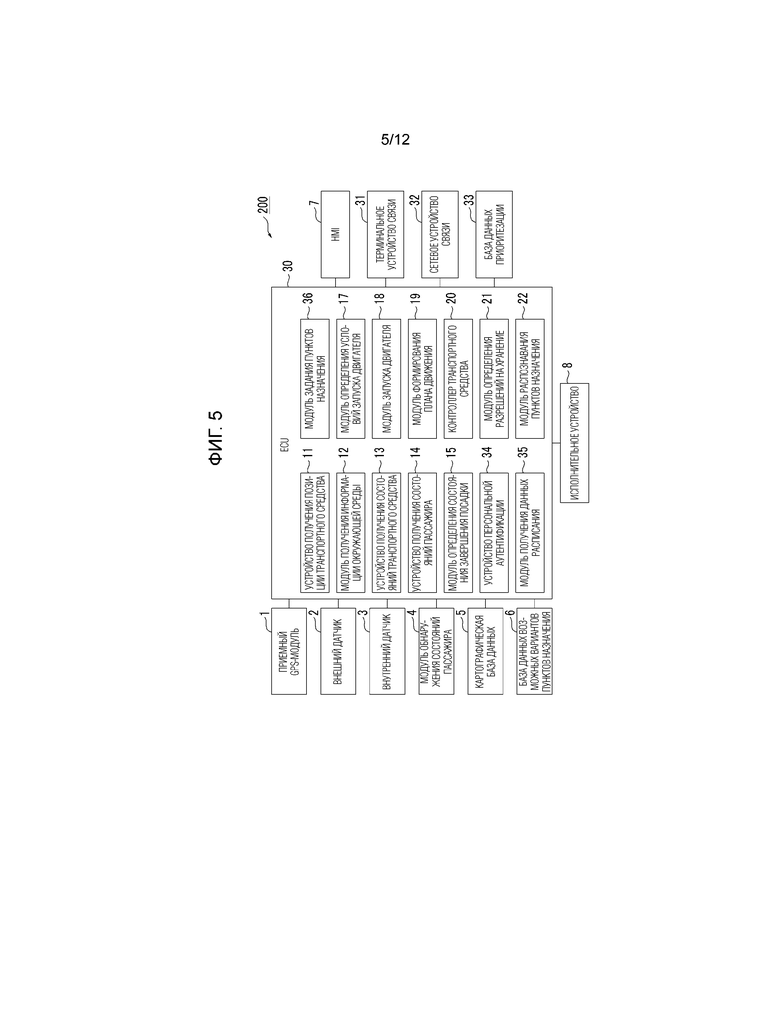
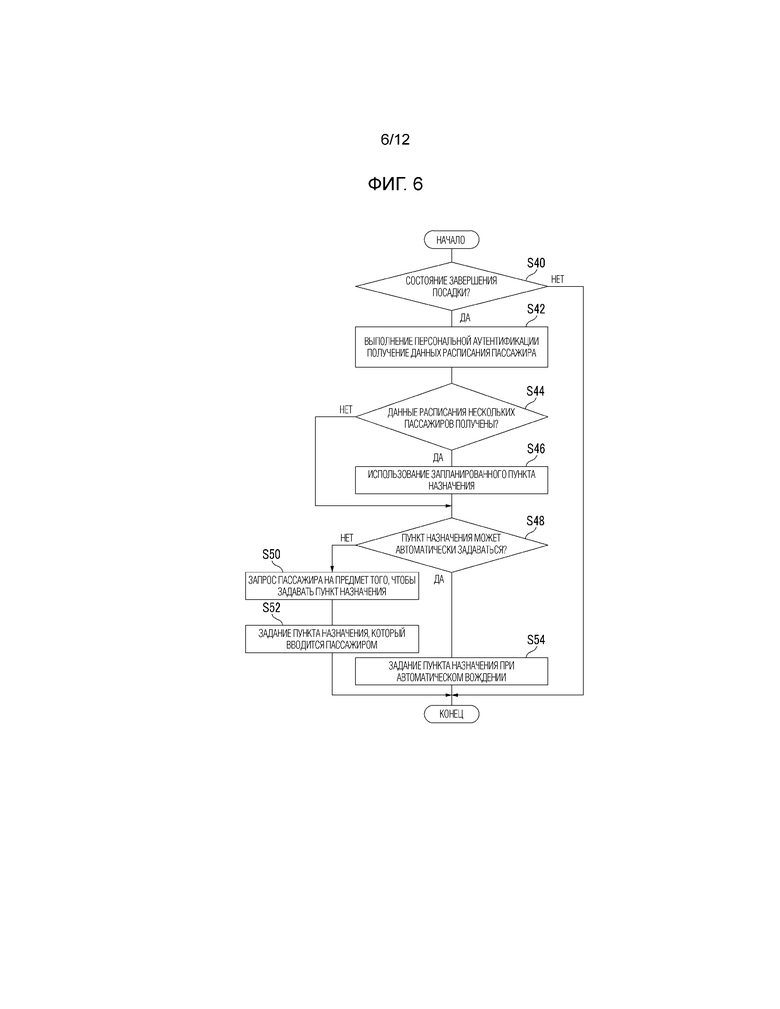
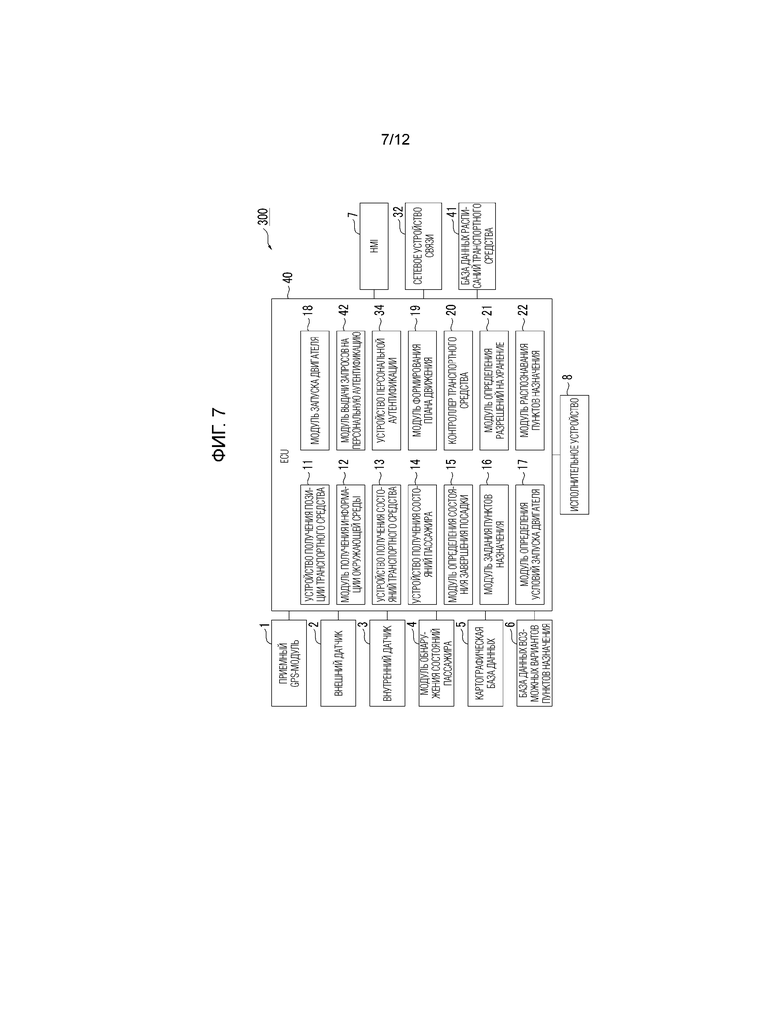
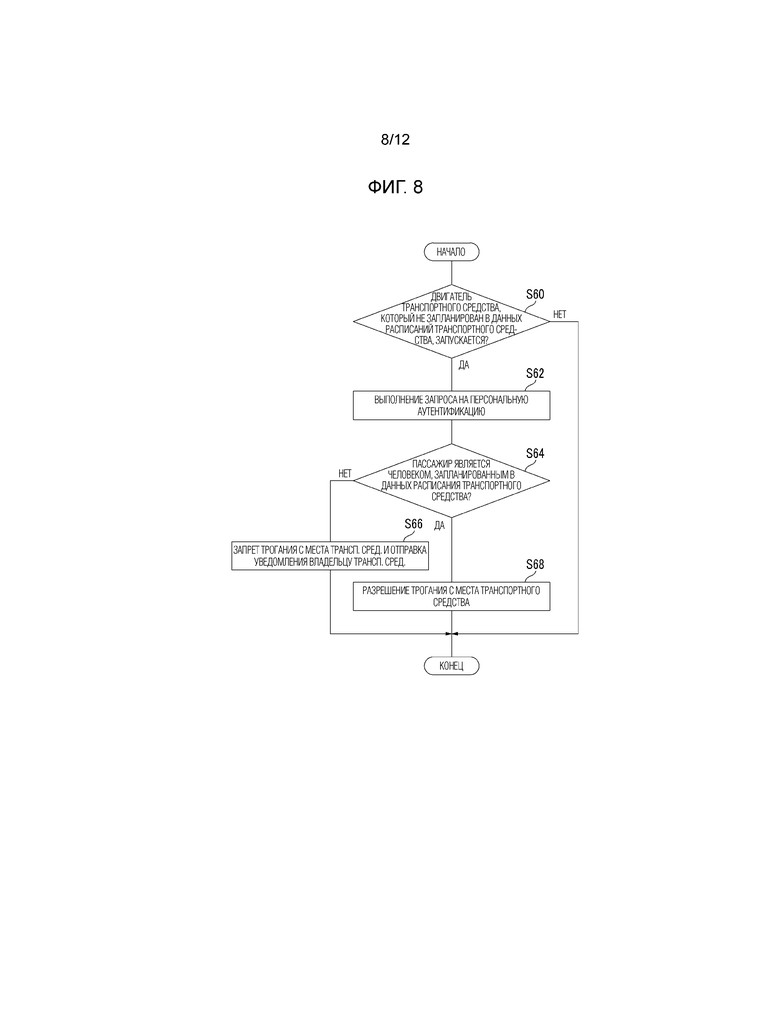
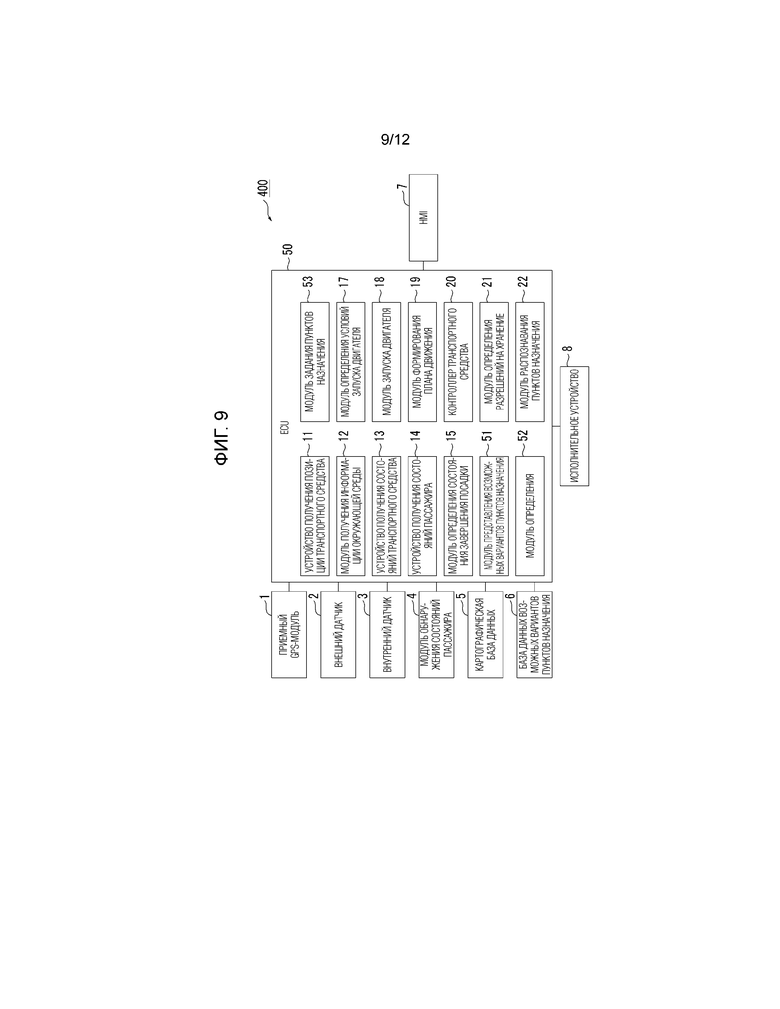
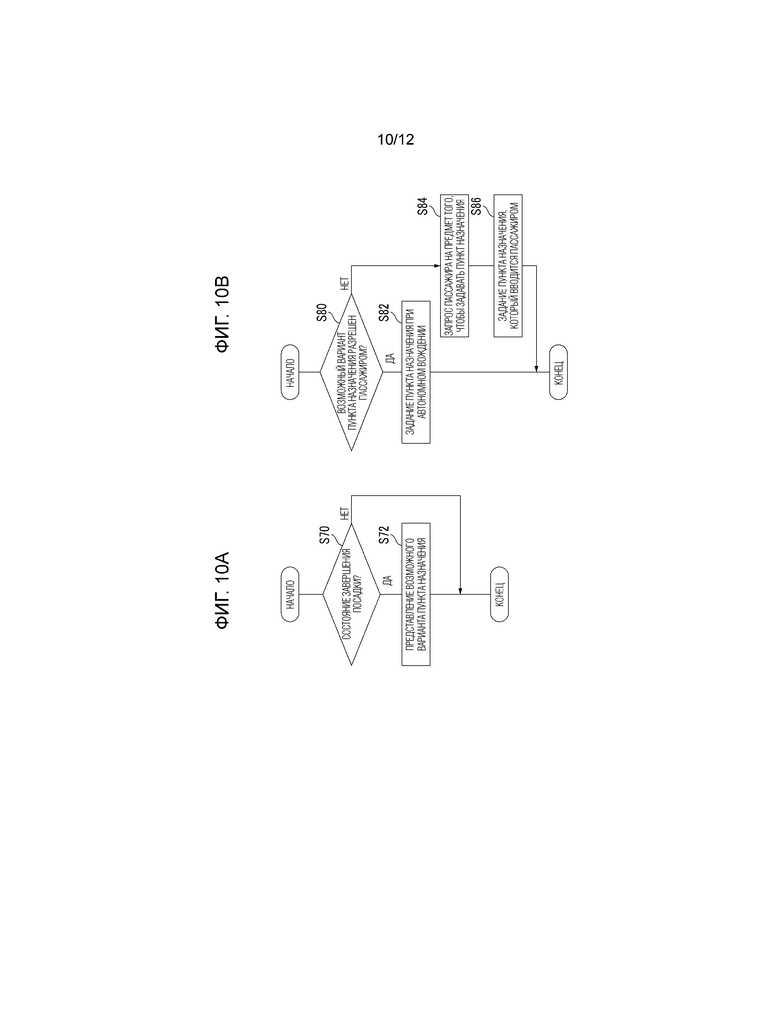
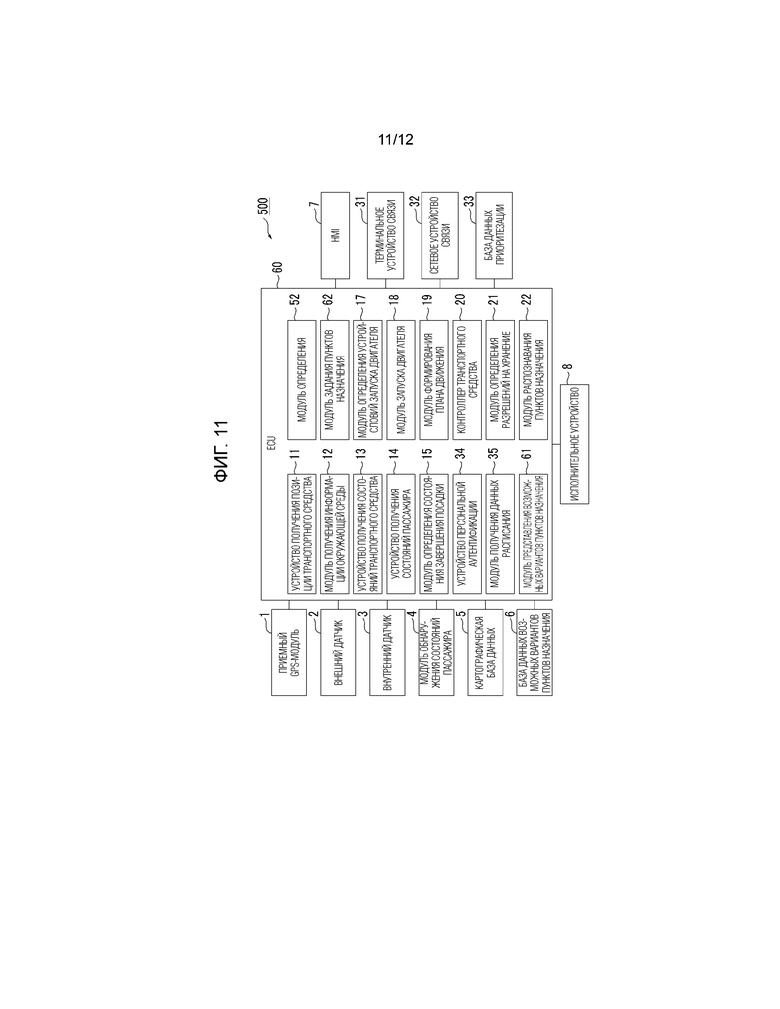
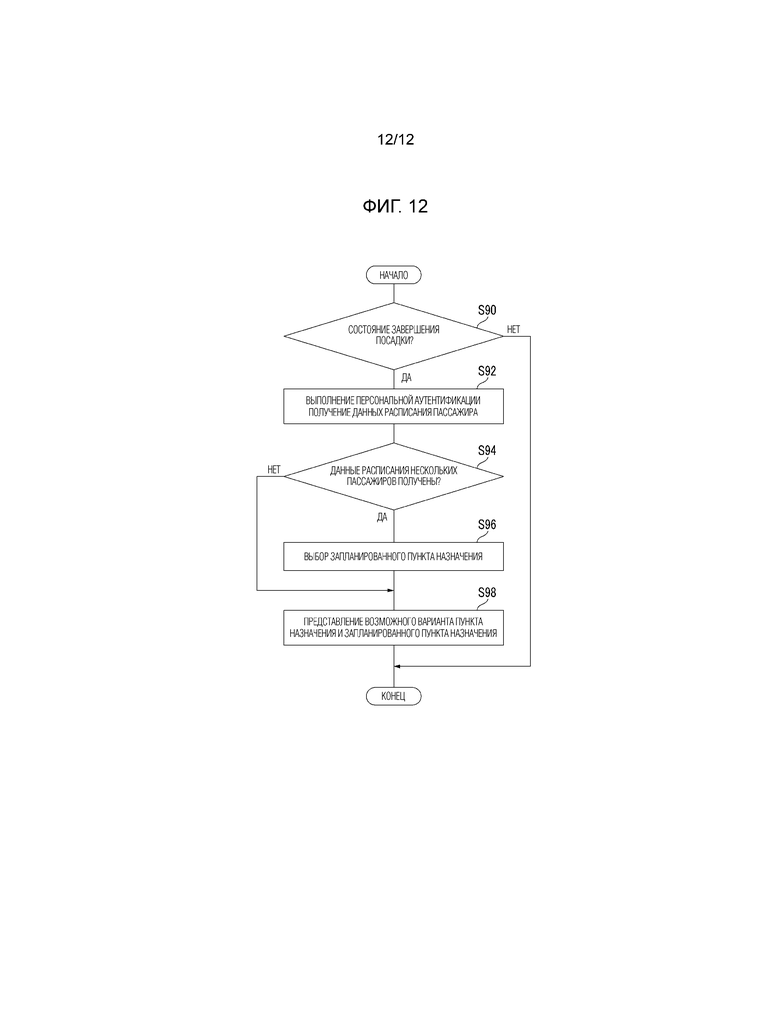
Изобретение относится к системе автономного вождения. Система включает устройство получения позиции транспортного средства, устройство получения состояний транспортного средства, устройство получения состояний пассажира, базу данных возможных вариантов пунктов назначения и электронный модуль. База данных сохраняет данные возможных вариантов пунктов назначения, которые включают вариант пункта назначения, коррелированный с состоянием пассажира. Электронный модуль определяет, находится или нет транспортное средство в состоянии завершения посадки, и задает пункт назначения транспортного средства в ходе автономного вождения на основе позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения. Обеспечивается улучшение задания пункта назначения для удобства пассажира. 12 з.п. ф-лы, 12 ил.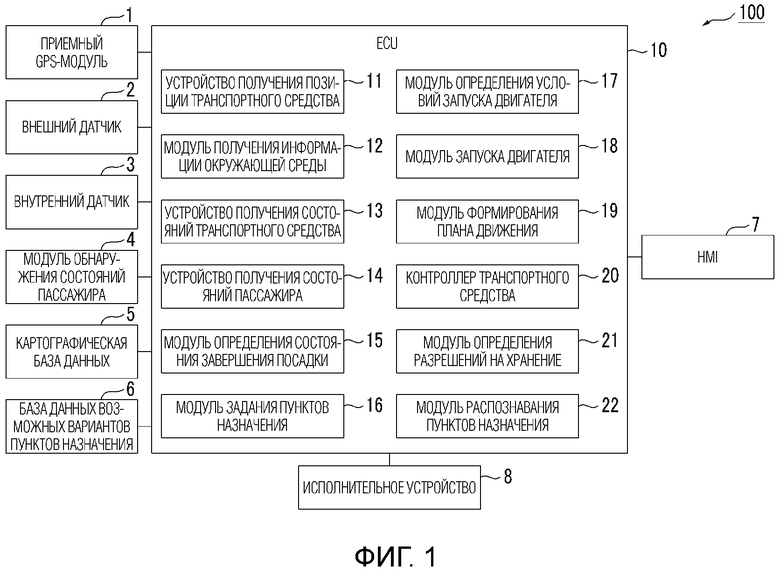
1. Система автономного вождения, которая выполняет автономное вождение транспортного средства, причем система автономного вождения содержит:
устройство получения позиции транспортного средства, выполненное с возможностью получать позицию транспортного средства на карте;
устройство получения состояний транспортного средства, выполненное с возможностью получать состояние транспортного средства для транспортного средства;
устройство получения состояний пассажира, выполненное с возможностью получать состояние пассажира транспортного средства;
базу данных возможных вариантов пунктов назначения, выполненную с возможностью сохранять данные возможных вариантов пунктов назначения, включающие в себя возможный вариант пункта назначения и состояние пассажира, коррелированное с возможным вариантом пункта назначения; и
электронный модуль управления, выполненный с возможностью:
определять то, находится или нет транспортное средство в состоянии завершения посадки, на основе состояния транспортного средства и состояния пассажира, и
задавать пункт назначения транспортного средства в ходе автономного вождения на основе позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения в случае, если электронный модуль управления определяет то, что транспортное средство находится в состоянии завершения посадки.
2. Система автономного вождения по п. 1, в которой:
данные возможных вариантов пунктов назначения включают в себя возможный вариант пункта назначения и состояние пассажира, а также время, коррелированное с возможным вариантом пункта назначения; и
в случае, если электронный модуль управления определяет то, что транспортное средство находится в состоянии завершения посадки, электронный модуль управления задает пункт назначения транспортного средства в ходе автономного вождения на основе текущего времени, позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения.
3. Система автономного вождения по п. 2, дополнительно содержащая терминальное устройство связи, выполненное с возможностью осуществлять связь с портативным информационным терминалом пассажира транспортного средства, при этом:
электронный модуль управления выполнен с возможностью получать данные расписания пассажира из портативного информационного терминала через связь с использованием терминального устройства связи; и
электронный модуль управления задает пункт назначения транспортного средства в ходе автономного вождения на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных расписания.
4. Система автономного вождения по п. 2, дополнительно содержащая:
сетевое устройство связи, выполненное с возможностью осуществлять связь с информационной сетью; и
устройство персональной аутентификации, выполненное с возможностью выполнять персональную аутентификацию пассажира транспортного средства, при этом:
электронный модуль управления выполнен с возможностью получать данные расписания пассажира, прошедшего персональную аутентификацию посредством устройства персональной аутентификации через связь с использованием сетевого устройства связи; и
электронный модуль управления задает пункт назначения транспортного средства в ходе автономного вождения на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных расписания.
5. Система автономного вождения по п. 3 или 4, в которой в случае, если получаются данные расписания множества пассажиров, электронный модуль управления задает пункт назначения транспортного средства в ходе автономного вождения на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных приоритезации, заданных заранее.
6. Система автономного вождения по п. 1, дополнительно содержащая:
устройство представления, выполненное с возможностью представлять информацию пассажиру; и
устройство ввода, выполненное с возможностью принимать операцию разрешения пассажира, при этом:
электронный модуль управления выполнен с возможностью инструктировать устройству представления представлять по меньшей мере один из возможных вариантов пунктов назначения пассажиру на основе позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения, в случае если электронный модуль управления определяет то, что транспортное средство находится в состоянии завершения посадки;
электронный модуль управления выполнен с возможностью определять то, разрешается или нет возможный вариант пункта назначения пассажиром, на основе ввода из устройства ввода; и
электронный модуль управления выполнен с возможностью задавать возможный вариант пункта назначения в качестве пункта назначения транспортного средства в ходе автономного вождения в случае, если электронный модуль управления определяет то, что возможный вариант пункта назначения разрешается пассажиром.
7. Система автономного вождения по п. 6, в которой:
данные возможных вариантов пунктов назначения включают в себя возможный вариант пункта назначения и состояние пассажира, а также время, коррелированное с возможным вариантом пункта назначения; и
в случае, если электронный модуль управления определяет то, что транспортное средство находится в состоянии завершения посадки, электронный модуль управления представляет возможный вариант пункта назначения пассажиру на основе текущего времени, позиции транспортного средства на карте, состояния пассажира и данных возможных вариантов пунктов назначения.
8. Система автономного вождения по п. 7, дополнительно содержащая терминальное устройство связи, выполненное с возможностью осуществлять связь с портативным информационным терминалом пассажира транспортного средства, при этом:
электронный модуль управления выполнен с возможностью получать данные расписания пассажира из портативного информационного терминала через связь с использованием терминального устройства связи;
данные расписания включают в себя запланированный пункт назначения, коррелированный с запланированным временем; и
электронный модуль управления выполнен с возможностью представлять по меньшей мере одно из возможного варианта пункта назначения и запланированного пункта назначения пассажиру на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных расписания.
9. Система автономного вождения по п. 7, дополнительно содержащая:
сетевое устройство связи, выполненное с возможностью осуществлять связь с информационной сетью; и
устройство персональной аутентификации, выполненное с возможностью выполнять персональную аутентификацию пассажира транспортного средства, при этом:
электронный модуль управления выполнен с возможностью получать данные расписания пассажира, прошедшего персональную аутентификацию посредством устройства персональной аутентификации через связь с использованием сетевого устройства связи;
данные расписания включают в себя запланированный пункт назначения, коррелированный с запланированным временем; и
электронный модуль управления выполнен с возможностью представлять по меньшей мере одно из возможного варианта пункта назначения и запланированного пункта назначения пассажиру на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных расписания.
10. Система автономного вождения по п. 8 или 9, в которой в случае, если получаются данные расписания множества пассажиров, электронный модуль управления выполнен с возможностью представлять по меньшей мере одно из возможного варианта пункта назначения и запланированного пункта назначения пассажиру на основе текущего времени, позиции транспортного средства на карте, состояния пассажира, данных возможных вариантов пунктов назначения и данных приоритезации, заданных заранее.
11. Система автономного вождения по любому из пп. 1-4 и 6-9, в которой:
электронный модуль управления выполнен с возможностью определять то, разрешает или нет пассажир сохранение пункта назначения в базе данных возможных вариантов пунктов назначения;
в случае, если электронный модуль управления определяет то, что пассажир разрешает сохранение пункта назначения в базе данных возможных вариантов пунктов назначения, электронный модуль управления выполнен с возможностью сохранять пункт назначения в базе данных возможных вариантов пунктов назначения в качестве возможного варианта пункта назначения в корреляции с состоянием пассажира; и
в случае, если электронный модуль управления определяет то, что пассажир не разрешает сохранение пункта назначения в базе данных возможных вариантов пунктов назначения, электронный модуль управления не сохраняет пункт назначения в базе данных возможных вариантов пунктов назначения.
12. Система автономного вождения по любому из пп. 1-4 и 6-9, дополнительно содержащая базу данных расписаний транспортного средства, выполненную с возможностью сохранять данные расписаний транспортного средства, коррелированные с транспортным средством,
при этом электронный модуль управления выполнен с возможностью выдавать запрос на персональную аутентификацию пассажиру в случае, если двигатель транспортного средства, который не запланирован в данных расписаний транспортного средства, запускается.
13. Система автономного вождения по любому из пп. 1-4 и 6-9, в которой:
в случае, если электронный модуль управления определяет то, что транспортное средство находится в состоянии завершения посадки в ходе остановки двигателя транспортного средства, электронный модуль управления выполнен с возможностью определять то, удовлетворяется или нет предварительно установленное условие запуска двигателя, на основе состояния транспортного средства; и
в случае, если электронный модуль управления определяет то, что условие запуска двигателя удовлетворяется, электронный модуль управления выполнен с возможностью запускать двигатель транспортного средства.
| US 9365218 B2, 14.06.2016 | |||
| RU 2014127981 A, 27.01.2016 | |||
| JP 2014240777 A, 25.12.2014 | |||
| US 8346426 B1, 01.01.2013. |

