ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству обработки информации и способу обработки информации.
ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
[0002] В патенте США № 8509982 раскрыто транспортное средство, способное осуществлять связь. Транспортное средство информирует водителя о том, что транспортное средство приближается к области, где автономное вождение затруднено, со ссылкой на карту, где хранятся области, где автономное вождение затруднено. Области, где автономное вождение затруднено, включают в себя секции, где автономное вождение затруднено, в которых автономное вождение можно продолжать с пониженными скоростями, и секции запрета автономного вождения, где автономное вождение запрещено. Области, где автономное вождение затруднено, также могут устанавливаться водителями. Например, когда водитель замечает временную конструкцию, водитель задает место временной конструкции как область, где автономное вождение затруднено. Водитель может устанавливать срок действия (период поддержания данных) для области, где автономное вождение затруднено, установленной им самим. Информация об области, где автономное вождение затруднено, совместно используется с другими транспортными средствами через сеть.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Транспортное средство, раскрытое в патенте США № 8509982, и другие транспортные средства, освобождают секции запрета автономного вождения на основании сроков действия, установленных конкретными водителями. Однако секции запрета автономного вождения могут устанавливаться не только потому, что автономное вождение затруднено временной конструкцией, но и вследствие плохой погоды или вследствие частых неудач объединения в автономном вождении. Когда секции запрета автономного вождения устанавливаются по этим причинам, трудно устанавливать сроки действия для этих секций. Поэтому не следует определять освобождение секций запрета автономного вождения только на основании сроков действия. В этой области техники, требуется устройство обработки информации, которое может освобождать секции запрета автономного вождения, когда причины установления секций запрета автономного вождения устранены.
[0004] Устройство обработки информации согласно первому аспекту настоящего изобретения представляет собой устройство обработки информации, способное осуществлять связь с транспортным средством, включающий в себя: блок хранения, выполненный с возможностью хранения местоположения секции запрета автономного вождения на карте в связи с условием освобождения, установленным на основании состояния движения транспортного средства; и блок управления, выполненный с возможностью получения состояния движения транспортного средства, включающего в себя местоположение транспортного средства на карте от транспортного средства посредством связи, причем блок управления выполнен с возможностью определения, освобождать ли секцию запрета автономного вождения на основании полученного состояния движения транспортного средства, местоположения секции запрета автономного вождения и условия освобождения секции запрета автономного вождения, причем местоположение и условие освобождения хранится в блоке хранения.
[0005] В устройстве обработки информации, на блоке хранения хранится местоположение секции запрета автономного вождения на карте в связи с условием освобождения. Блок управления определяет, освобождать ли секцию запрета автономного вождения на основании состояния движения транспортного средства и на основании местоположения и условия освобождения секции запрета автономного вождения. Таким образом, устройство обработки информации может определять устранение причины установления секции запрета автономного вождения с использованием условия освобождения, установленного для каждой секции запрета автономного вождения на основании состояния движения транспортного средства. Соответственно, устройство обработки информации может освобождать секцию запрета автономного вождения, когда устранена причина установления секции запрета автономного вождения.
[0006] В первом аспекте настоящего изобретения, блок хранения может быть выполнен с возможностью хранения местоположения первой секции запрета автономного вождения, которая является секцией запрета автономного вождения на карте в связи с первым условием освобождения в качестве условия освобождения, где количество транспортных средств, проходящих через первую секцию запрета автономного вождения оказывается большим или равным заданному количеству, и блок управления может быть выполнен с возможностью определения освобождения первой секции запрета автономного вождения, когда количество транспортных средств, проходящих через первую секцию запрета автономного вождения, больше или равно заданному количеству. Первая секция запрета автономного вождения может устанавливаться как секция запрета автономного вождения вследствие наличия препятствия. В этом случае, устройство обработки информации может определять устранение причины установления первой секции запрета автономного вождения, на основании количества проходящих транспортных средств.
[0007] В первом аспекте настоящего изобретения, блок хранения может быть выполнен с возможностью хранения местоположения второй секции запрета автономного вождения, которая является секцией запрета автономного вождения на карте в связи со вторым условием освобождения в качестве условия освобождения, где транспортное средство проходит через вторую секцию запрета автономного вождения без активации бортового оборудования, и блок управления может быть выполнен с возможностью получения рабочей информации о бортовом оборудовании от транспортного средства в качестве состояния движения, и определения освобождения второй секции запрета автономного вождения, когда транспортное средство проходит через вторую секцию запрета автономного вождения без активации бортового оборудования.
[0008] Вторая секция запрета автономного вождения может представлять собой секцию, заданную как секция запрета автономного вождения вследствие дождливой погоды. Бортовое оборудование может представлять собой стеклоочиститель. В этом случае, устройство обработки информации может определять устранение причины установления второй секции запрета автономного вождения, на основании рабочей информации о бортовом оборудовании, например, стеклоочистителе и стеклообогревателе.
[0009] В первом аспекте настоящего изобретения, блок хранения может быть выполнен с возможностью хранения местоположения третьей секции запрета автономного вождения, которая является секцией запрета автономного вождения на карте в связи с третьим условием освобождения в качестве условия освобождения, где транспортное средство проходит через третью секцию запрета автономного вождения без активации системы движения, и блок управления может быть выполнен с возможностью получения рабочей информации о системе движения от транспортного средства в качестве состояния движения и определения освобождения третьей секции запрета автономного вождения, когда транспортное средство проходит через третью секцию запрета автономного вождения без активации системы движения.
[0010] Третья секция запрета автономного вождения может представлять собой секцию, заданную как секция запрета автономного вождения вследствие того, что секция является дорогой с низким коэффициентом сцепления. Система движения может представлять собой систему для предотвращения пробуксовки. В этом случае, устройство обработки информации может определять устранение причины установления третьей секции запрета автономного вождения, на основании рабочей информации о системе движения, например, системе предотвращения пробуксовки.
[0011] В первом аспекте настоящего изобретения, блок хранения может быть выполнен с возможностью хранения местоположения четвертой секции запрета автономного вождения, которая является секцией запрета автономного вождения на карте в связи с четвертым условием освобождения в качестве условия освобождения, где разность между скоростью транспортного средства, движущегося в секции пункта назначения объединения, соединенной с четвертой секцией запрета автономного вождения, и ограничением скорости секции пункта назначения объединения меньше предписанной скорости, и блок управления может быть выполнен с возможностью определения освобождения четвертой секции запрета автономного вождения, когда разность между скоростью транспортного средства, движущегося в секции пункта назначения объединения, и ограничением скорости секции пункта назначения объединения меньше предписанной скорости.
[0012] Четвертая секция запрета автономного вождения может представлять собой секцию, имеющую точку объединения впереди секции. В этом случае, устройство обработки информации может определять устранение причины установления четвертой секции запрета автономного вождения, на основании разности между скоростью транспортного средства, движущегося в секции пункта назначения объединения, и ограничением скорости секции пункта назначения объединения.
[0013] Способ обработки информации согласно второму аспекту настоящего изобретения включает в себя: сохранение в блоке хранения местоположения секции запрета автономного вождения на карте в связи с условием освобождения, установленным на основании состояния движения транспортного средства; получение состояния движения транспортного средства, включающего в себя местоположение транспортного средства на карте, посредством связи от транспортного средства блоком управления; и определение, освобождать ли секцию запрета автономного вождения на основании полученного состояния движения транспортного средства, местоположения секции запрета автономного вождения и условия освобождения секции запрета автономного вождения, причем местоположение и условие освобождения хранится в блоке хранения.
[0014] Во втором аспекте настоящего изобретения, секция автономного вождения может представлять собой первую секцию запрета автономного вождения, заданную как секцию запрета автономного вождения вследствие наличия препятствия, условие освобождения может представлять собой первое условие освобождения, где количество транспортных средств, проходящих через первую секцию запрета автономного вождения, оказывается большим или равным заданному количеству, и первая секция запрета автономного вождения может определяться блоком управления как подлежащая освобождению, когда количество транспортных средств, проходящих через первую секцию запрета автономного вождения, больше или равно заданному количеству.
[0015] Во втором аспекте настоящего изобретения, секция автономного вождения может представлять собой секцию, заданную как секция запрета автономного вождения вследствие дождливой погоды, условие освобождения может представлять собой второе условие освобождения, где транспортное средство проходит через вторую секцию запрета автономного вождения без активации бортового оборудования, и рабочая информация о бортовом оборудовании в качестве состояния движения может получаться от транспортного средства блоком управления, и вторая секция запрета автономного вождения может определяться блоком управления как подлежащая освобождению, когда транспортное средство проходит через вторую секцию запрета автономного вождения без активации бортового оборудования.
[0016] Во втором аспекте настоящего изобретения, секция автономного вождения может представлять собой секцию, заданную как секция запрета автономного вождения вследствие того, что секция является секция дороги с низким коэффициентом сцепления, условие освобождения может представлять собой третье условие освобождения, где транспортное средство проходит через третью секцию запрета автономного вождения без активации системы движения, и рабочая информация о системе движения может получаться от транспортного средства блоком управления в качестве состояния движения, и третья секция запрета автономного вождения может определяться блоком управления как подлежащая освобождению, когда транспортное средство проходит через третью секцию запрета автономного вождения без активации системы движения.
[0017] Во втором аспекте настоящего изобретения, секция запрета автономного вождения может представлять собой четвертую секцию запрета автономного вождения, заданную как секция, имеющая точку объединения впереди секции, условие освобождения может представлять собой четвертое условие освобождения, где разность между скоростью транспортного средства, движущегося в секции пункта назначения объединения, соединенной с четвертой секцией запрета автономного вождения, и ограничением скорости секции пункта назначения объединения меньше предписанной скорости, и четвертая секция запрета автономного вождения может определяться блоком управления как подлежащая освобождению, когда разность между скоростью транспортного средства, движущегося в секции пункта назначения объединения, и ограничением скорости секции пункта назначения объединения меньше предписанной скорости.
[0018] Согласно различным аспектам настоящего изобретения, можно освобождать секцию запрета автономного вождения, когда устранена причина установления секции запрета автономного вождения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0019] Признаки, преимущества и техническая и промышленная применимость иллюстративных вариантов осуществления изобретения будут описаны ниже со ссылкой на прилагаемые чертежи, в которых аналогичные ссылочные позиции обозначают аналогичные элементы, и где:
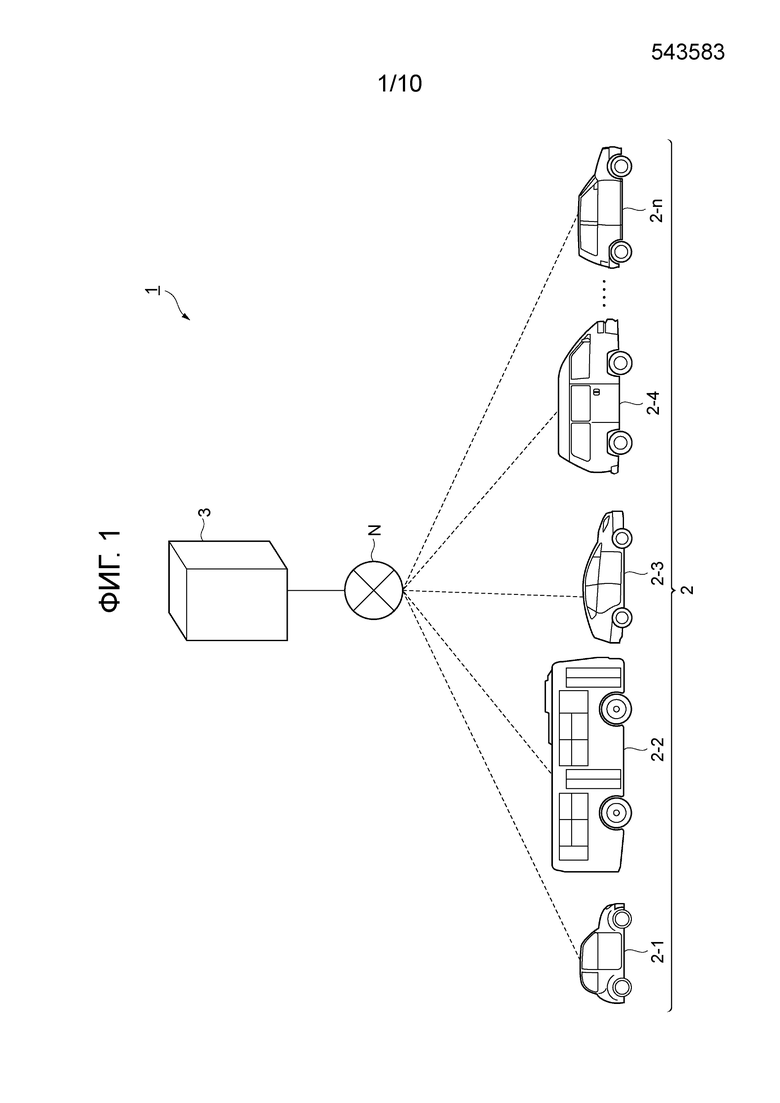
фиг. 1 - пояснительный вид системы связи транспортных средств;
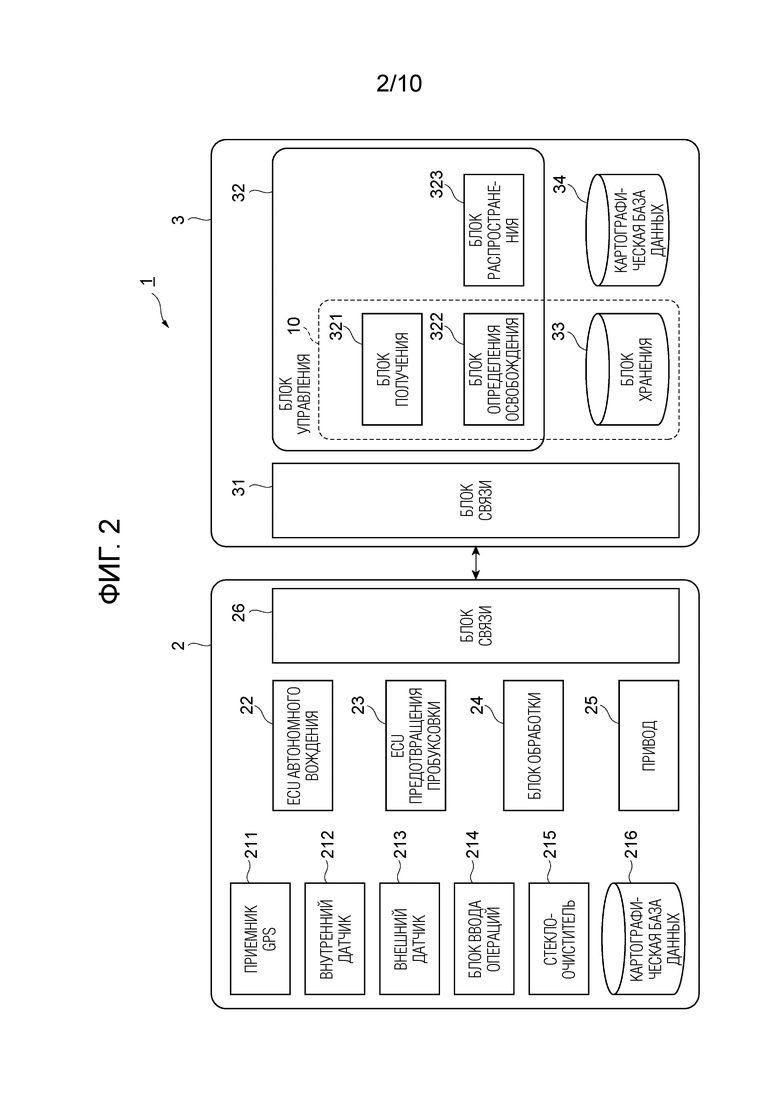
фиг. 2 - блок-схема, демонстрирующая конфигурацию системы связи транспортных средств;
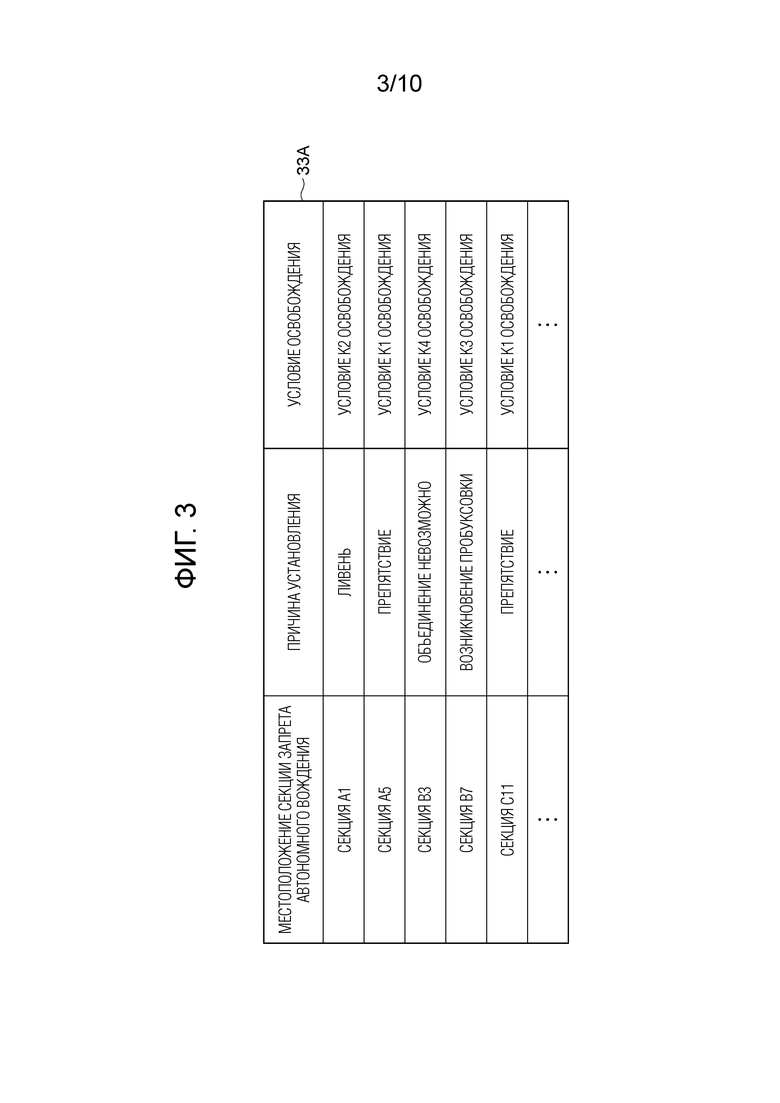
фиг. 3 - один пример таблицы освобождения;
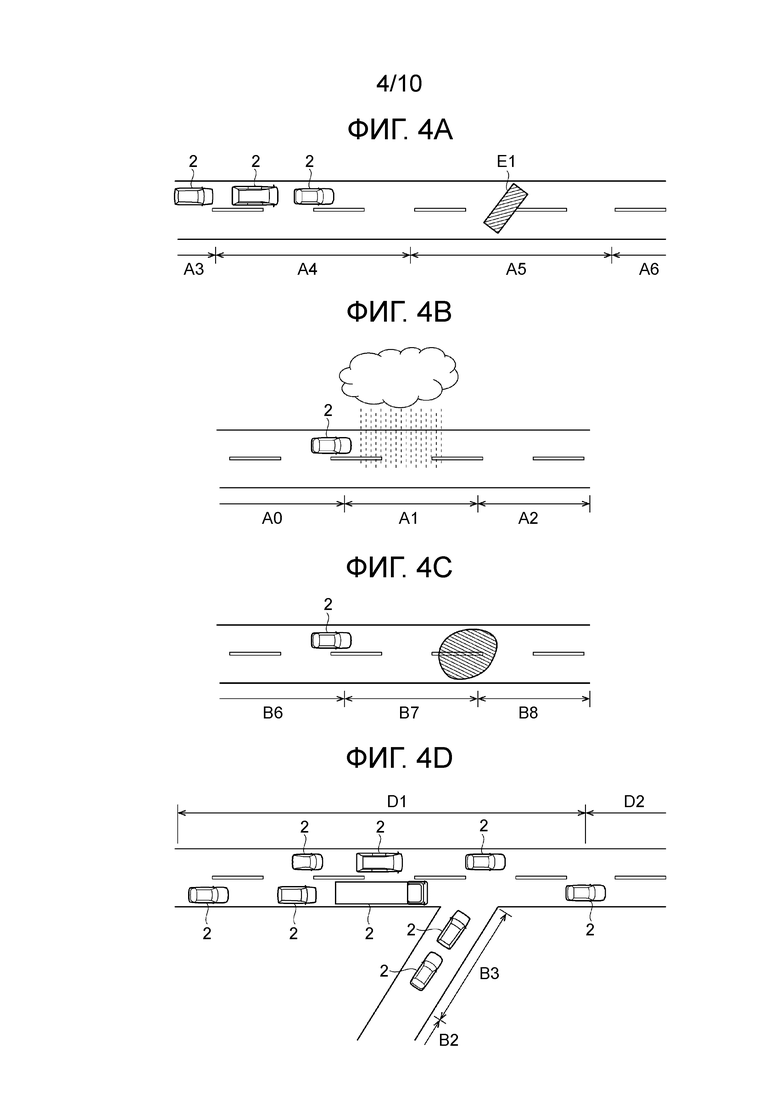
фиг. 4A - пояснительный вид секции запрета автономного вождения;
фиг. 4B - пояснительный вид секции запрета автономного вождения;
фиг. 4C - пояснительный вид секции запрета автономного вождения;
фиг. 4D - пояснительный вид секции запрета автономного вождения;
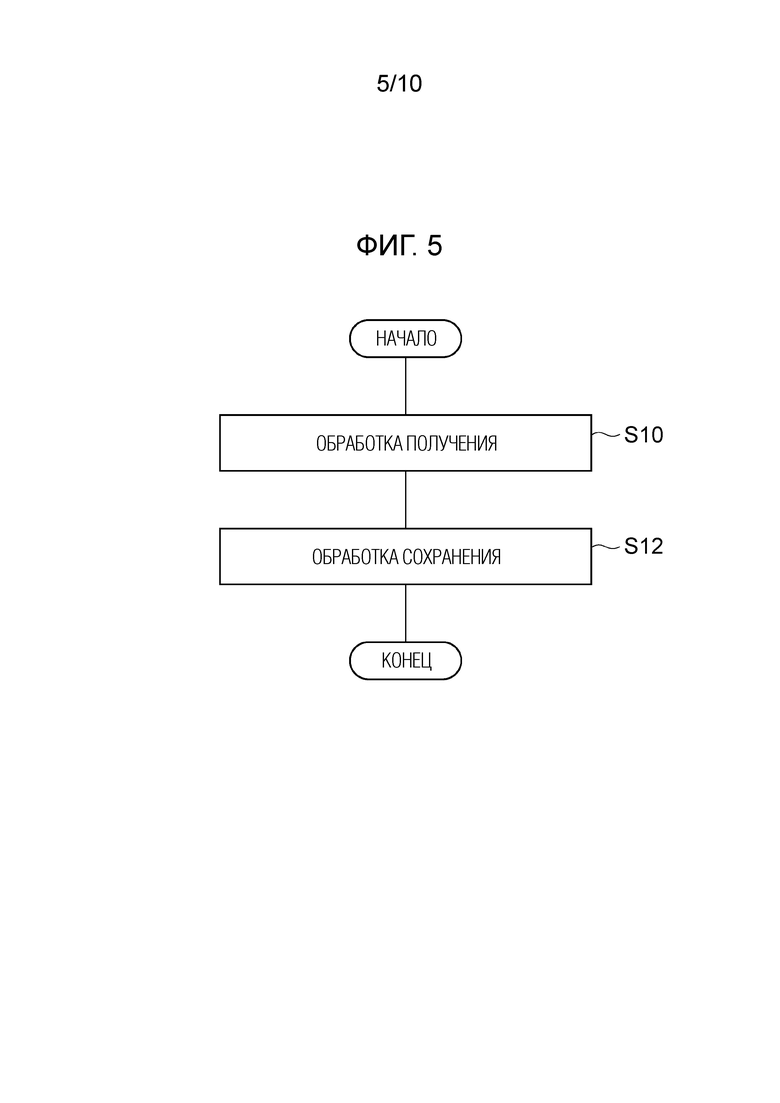
фиг. 5 - блок-схема последовательности операций обработки получения;
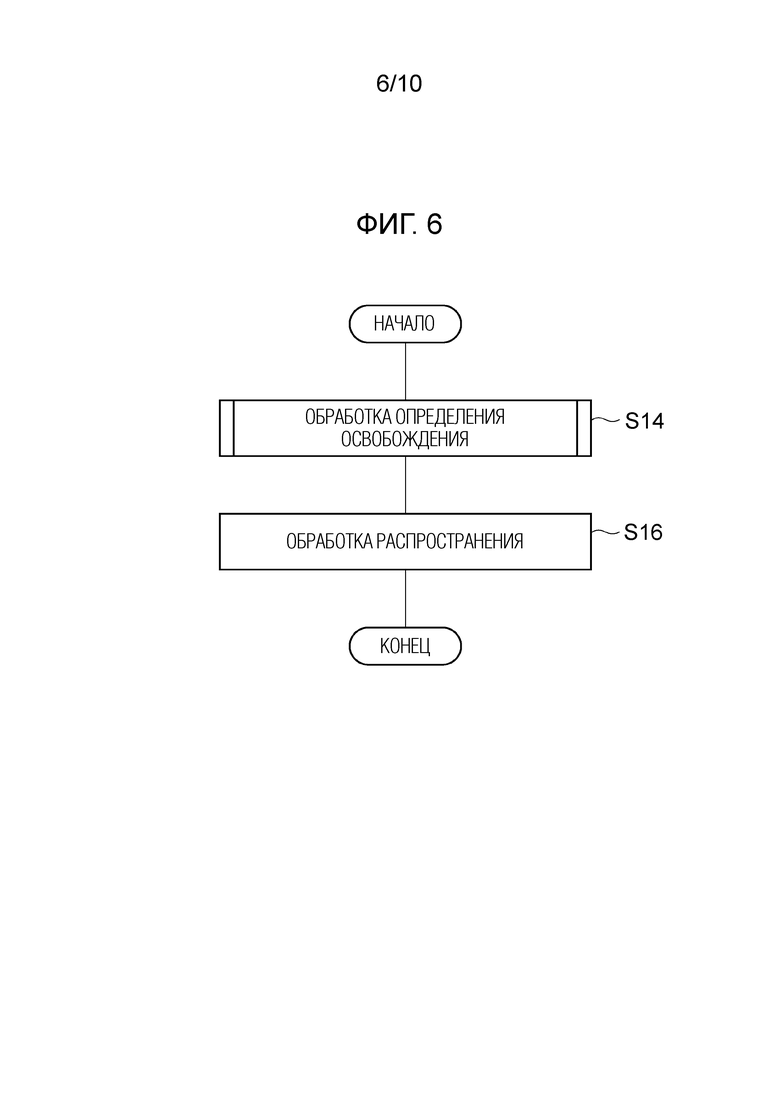
фиг. 6 - блок-схема последовательности операций обработки определения освобождения;
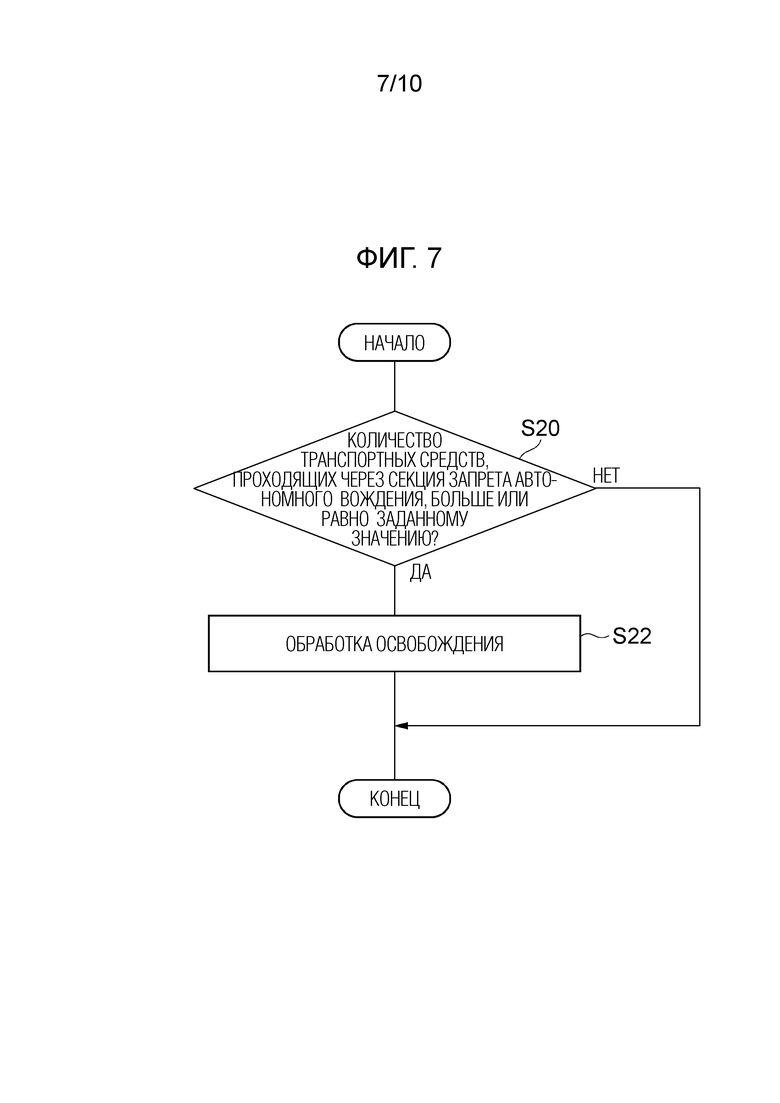
фиг. 7 - один пример блок-схемы последовательности операций обработки освобождения первой секции запрета автономного вождения;
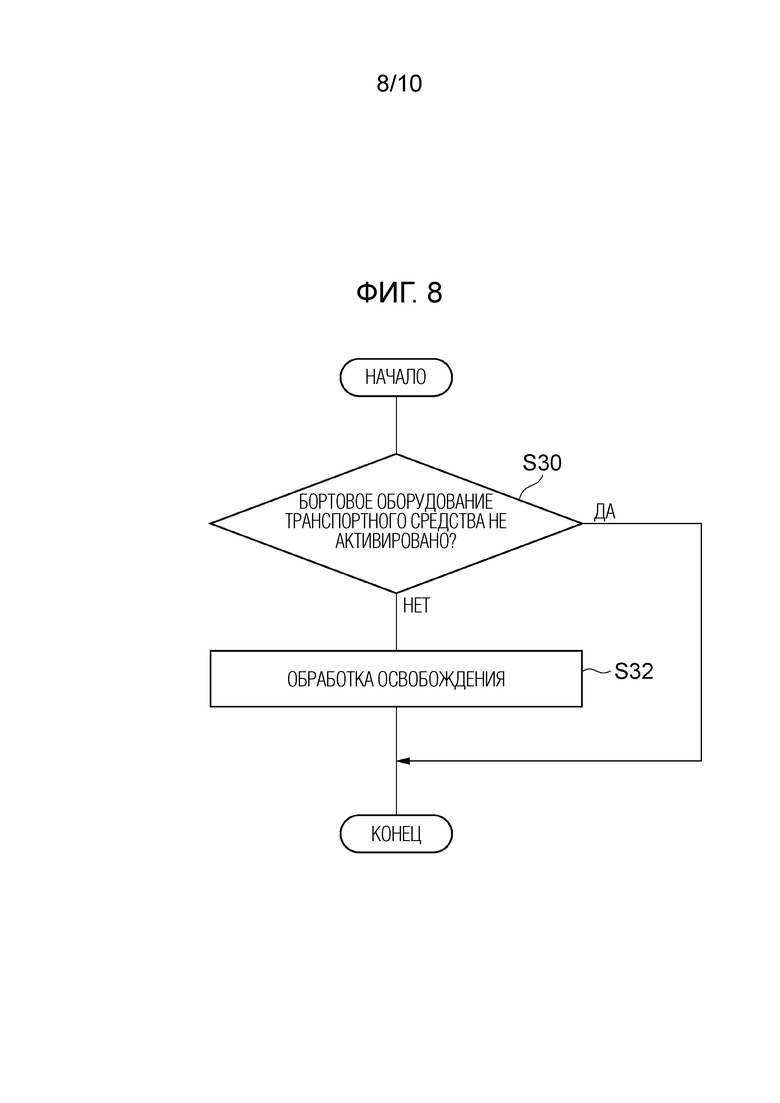
фиг. 8 - один пример блок-схемы последовательности операций обработки освобождения второй секции запрета автономного вождения;
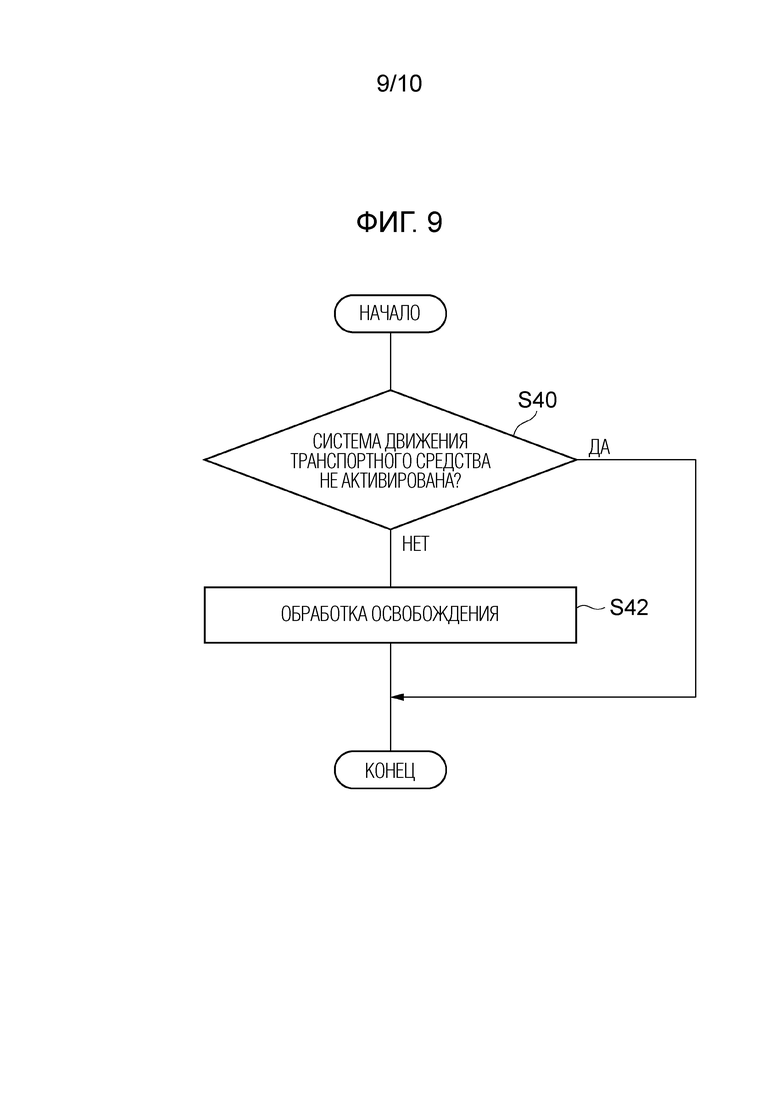
фиг. 9 - один пример блок-схемы последовательности операций обработки освобождения третьей секции запрета автономного вождения; и
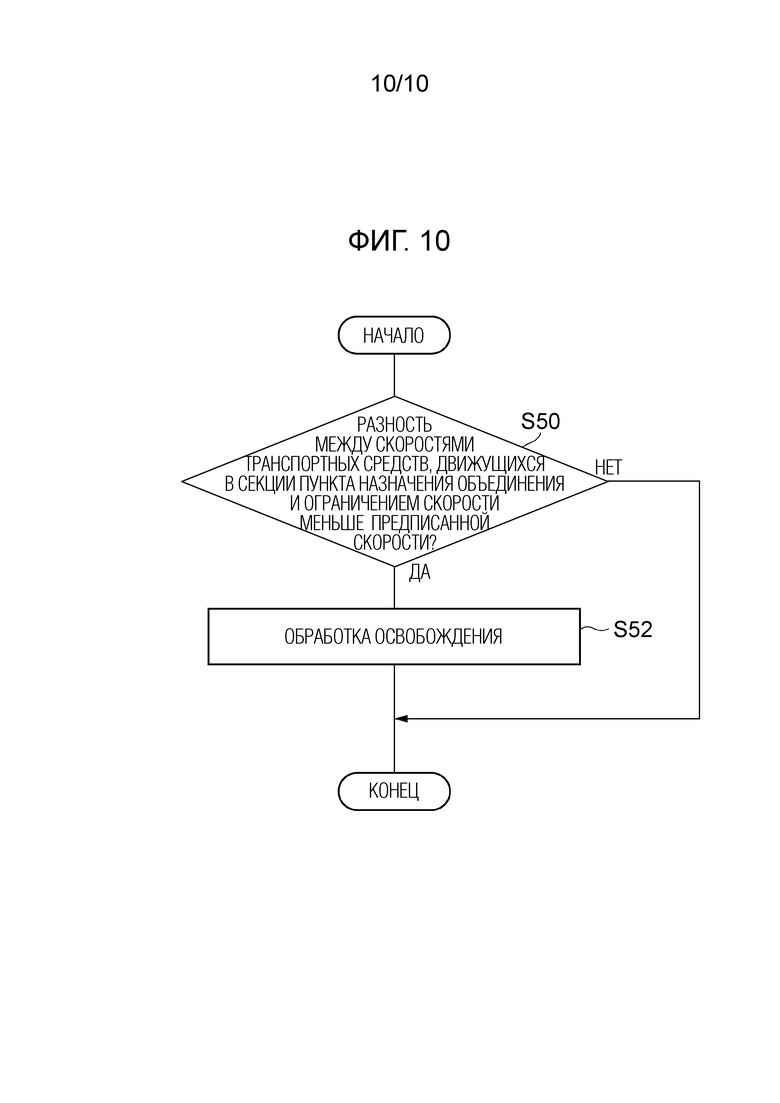
фиг. 10 - один пример блок-схемы последовательности операций обработки освобождения четвертой секции запрета автономного вождения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0020] Далее, со ссылкой на прилагаемые чертежи, будет описан настоящий вариант осуществления. В нижеприведенном описании, сходные или соответствующие составные части обозначены аналогичными ссылочными позициями во избежание избыточного объяснения.
[0021] Схема системы связи транспортных средств
На фиг. 1 показан пояснительный вид системы связи транспортных средств. Согласно фиг. 1, система связи транспортных средств 1 включает в себя множество транспортных средств 2 и сервер 3.
[0022] Множество транспортных средств 2 включают в себя транспортные средства с 2-1 по 2-n. Значение n является натуральным числом, больший единицы. Транспортные средства с 2-1 по 2-n являются транспортными средствами, включающими в себя функцию двусторонней связи. Транспортное средство 2 включает в себя общеизвестные составные части, например, датчик скорости, необходимый для поездки. Транспортное средство 2 движется по дороге за счет активации привода и пр. посредством операции вождения водителя или посредством функции автономного вождения. Транспортные средства с 2-1 по 2-n способны осуществлять связь с сервером 3 через сеть N. Например, сеть N представляет собой интернет или арендованную частным лицом линию.
[0023] Сервер 3 получает информацию от множества транспортных средств 2 через сеть N. Сервер 3 получает и собирает информацию, например, местоположение, скорость, информацию датчиков, рабочую информацию о системе движения или бортовом оборудовании и статус распознавания системы автономного вождения от множества транспортных средств 2. Сервер 3 также получает такую информацию, как информация о пробках, информация о препятствиях и информация о зоне обслуживания, от других серверов и пр., и распространяет полученную информацию на множество транспортных средств 2. Сервер 3 также может распространять информацию по запросам от множества транспортных средств 2. Таким образом, множество транспортных средств 2 может совместно использовать информацию через сервер 3.
[0024] Информация, которой должно совместно пользоваться множество транспортных средств 2, включает в себя секции запрета автономного вождения, где автономное вождение запрещено. Секции запрета автономного вождения являются секциями, заданными на карте. Секции устанавливаются на основании информации (информации, сообщаемой от множества транспортных средств 2), полученной от множества транспортных средств 2. Секции запрета автономного вождения устанавливаются после возникновения явлений, где автономное вождение не должно осуществляться, или явлений, где автономное вождение не может осуществляться. Кто устанавливает секцию запрета автономного вождения, не имеет значения. Таким образом, секции запрета автономного вождения могут устанавливаться сервером 3, транспортными средствами 2 или другими серверами.
[0025] На сервере 3 хранятся местоположения секций запрета автономного вождения на карте. Сервер 3 может распространять местоположения секций запрета автономного вождения на множество транспортных средств 2. Соответственно, информация о секциях запрета автономного вождения совместно используется множеством транспортных средств 2. Когда транспортные средства 2 являются транспортными средствами автономного вождения, транспортными средствами 2 можно управлять таким образом, чтобы транспортные средства 2 не перемещались посредством автономного вождения в секциях запрета автономного вождения. В этом случае, транспортные средства 2 перемещаются посредством ручного вождения, осуществляемого водителями транспортных средств 2.
[0026] Секции запрета автономного вождения налагают большое ограничение, которое запрещает транспортным средствам автономного вождения осуществлять автономное вождение. Соответственно, когда явление, где автономное вождение не должно осуществляться, или явление, где автономное вождение не может осуществляться, устранено, необходимо быстро освобождать секцию запрета автономного вождения. Сервер 3 определяет устранение явления, где автономное вождение не должно осуществляться, или явления, где автономное вождение не может осуществляться, и освобождает секцию запрета автономного вождения, как описано ниже. Сервер 3 может распространять освобождение секции запрета автономного вождения на множество транспортных средств 2. Соответственно, множество транспортных средств 2 может совместно использовать освобождение секции запрета автономного вождения, что позволяет транспортным средствам 2 двигаться посредством автономного вождения в секции, освобожденной от запрета автономного вождения.
[0027] Подробная конфигурация системы связи транспортных средств
Транспортное средство
На фиг. 2 показана блок-схема, описывающая конфигурацию системы связи транспортных средств 1. Согласно фиг. 2, один пример транспортного средства 2 включает в себя приемник 211 глобальной системы позиционирования (GPS), внутренний датчик 212, внешний датчик 213, блок 214 ввода операций, стеклоочиститель (один пример бортового оборудования) 215, картографическую базу данных 216, электронный блок 22 управления (ECU) автономного вождения, ECU 23 предотвращения пробуксовки (один пример системы движения), блок 24 обработки, привод 25 и блок 26 связи.
[0028] Приемник 211 GPS представляет собой устройство, которое принимает сигналы GPS. Приемник 211 GPS принимает сигналы от трех или более спутников GPS для измерения местоположения транспортного средства 2 (один пример состояния движения). Например, местоположение транспортного средства 2 выражается как информация местоположения, например, широта и долгота. Приемник 211 GPS передает информацию измеренного местоположения транспортного средства 2 на ECU 22 автономного вождения и блок 24 обработки.
[0029] Внутренний датчик 212 представляет собой устройство обнаружения, которое обнаруживает состояние движения (один пример состояния движения) транспортного средства 2. Один пример внутреннего датчика 212 включает в себя датчик скорости транспортного средства, датчик ускорения и датчик угловой скорости рыскания. Датчик скорости транспортного средства представляет собой датчик, который обнаруживает скорость транспортного средства 2. Одним примером датчика скорости транспортного средства является датчик скорости вращения колеса. Датчик ускорения представляет собой датчик, который обнаруживает ускорение транспортного средства 2. Одним примером датчика ускорения является датчик, который использует груз, поддерживаемый пружиной, для обнаружения ускорения из величины смещения пружины. Датчик угловой скорости рыскания представляет собой датчик, который обнаруживает угловую скорость рыскания транспортного средства 2. Одним примером датчика угловой скорости рыскания является гиродатчик. Внутренний датчик 212 передает состояние движения транспортного средства 2 на ECU 22 автономного вождения, ECU 23 предотвращения пробуксовки и блок 24 обработки.
[0030] Внешний датчик 213 представляет собой датчик, который обнаруживает условия вокруг транспортного средства 2. Один пример внешнего датчика 213 включает в себя камеру, радар и laser imaging detection and ranging (LIDAR). Камера представляет собой устройство формирования изображения, которое формирует изображение внешних условий транспортного средства 2. Радар представляет собой датчик, который обнаруживает препятствие вне транспортного средства 2 с использованием электрических волн (например, волн миллиметрового диапазона). LIDAR представляет собой датчик, который обнаруживает препятствие вне транспортного средства 2 с использованием света. Внешний датчик 213 передает условия вокруг транспортного средства 2 на ECU 22 автономного вождения и блок 24 обработки.
[0031] Блок 214 ввода операций представляет собой устройство, которое принимает операцию от водителя. Одним примером блока 214 ввода операций является рулевое колесо, используемое для ручного вождения. Блок 214 ввода операций передает сигнал, соответствующий операции вождения, на привод 25.
[0032] Стеклоочиститель 215 представляет собой механизм, который вытирает капли воды с лобового стекла или заднего стекла транспортного средства 2. Стеклоочиститель 215 активируется, когда датчик капель регистрирует капли воды. Стеклоочиститель 215 также может эксплуатироваться или активироваться на основании операции водителя. Стеклоочиститель 215 выводит рабочую информацию (один пример состояния движения) на блок 24 обработки.
[0033] Картографическая база данных 216 представляет собой базу данных, где хранятся картографическая информация. Картографическая информация представляет собой данные, на основании которых можно создавать карту. Картографическая информация включает в себя такую информацию, как информация местоположения на дорогах, информация о геометрии дорог (например, типы криволинейных и прямолинейных дорог и кривизна кривых), информация ширины дорог, информация высоты дорог, информация местоположения перекрестков и развилок и информация местоположения зданий. Картографическая база данных 216 может синхронизироваться с описанной ниже картографической базой данных 34 сервера 3 с заданными интервалами.
[0034] ECU 22 автономного вождения представляет собой электронный блок управления, имеющий арифметический блок, например, центральный процессор (CPU), запоминающее устройство, например, постоянную память (ROM) и оперативную память (RAM), схему связи по контроллерной сети (CAN) и пр. ECU 22 автономного вождения имеет описанные ниже функции, осуществляемые, когда CPU ECU 22 автономного вождения загружает и выполняет программы, хранящиеся в запоминающем устройстве.
[0035] ECU 22 автономного вождения установлен на транспортном средстве 2 для выполнения автономного вождения транспортного средства 2. Автономное вождение это управление транспортным средством, обеспечивающее автономное перемещение транспортного средства в отсутствие операции вождения водителя. Общество автомобильных инженеров (SAE) J3016 установило уровни автоматизации вождения в соответствии со степенью автономного вождения.
[0036] ECU 22 автономного вождения генерирует план поездки по целевому маршруту, заранее заданному на основании информации местоположения на транспортном средстве 2 на приемнике 211 GPS, картографической информации в картографической базе данных 216 и результатов обнаружения внутреннего датчика 212 и внешнего датчика 213. Целевой маршрут задается водителем или общеизвестной навигационной системой. ECU 22 автономного вождения выполняет автономное вождение согласно плану поездки. ECU 22 автономного вождения передает сигнал управления на привод транспортного средства 2 для выполнения автономного вождения в соответствии с планом поездки. ECU 22 автономного вождения генерирует план поездки общеизвестным методом и также выполняет автономное вождение.
[0037] ECU 22 автономного вождения может вычислять надежность системы при выполнении автономного вождения. Надежность системы является критерием однозначности определения или осуществления в автономном вождении. Надежность системы включает в себя надежность распознавания, надежность определения местоположения транспортного средства, надежность плана поездки и пр. Надежность распознавания зависит от рабочих характеристик внутреннего датчика 212 и внешнего датчика 213 и также зависит от условий поездки. Например, вычисление надежности распознавания дает тем более высокий результат, чем меньше препятствий распознается в окружающей среде. Вычисление надежности распознавания дает тем более высокий результат, чем лучше погода. Надежность определения местоположения транспортного средства зависит от рабочих характеристик GPS и также зависит от условий поездки. Например, вычисление надежности определения местоположения транспортного средства дает более высокий результат, там, где вблизи транспортного средства 2 не располагается зданий, по сравнению с местом, где располагается какое-либо здание. Надежность плана поездки можно оценивать на основании сходство между планом пути транспортного средства, движущегося по плану поездки, и траекторией транспортного средства, движущегося в центре полосы. Например, вычисление надежности плана поездки дает более высокий результат, когда план пути ближе к траектории транспортного средства, движущегося в центре полосы, чем к траектории объезда препятствия. ECU 22 автономного вождения передает надежность системы на блок 24 обработки.
[0038] ECU 22 автономного вождения передает сигнал окончания автономного вождения на блок 24 обработки, когда выполняется заранее заданное условие окончания автономного вождения. В случае приема сигнала перехода на ручное вождение, ECU 22 автономного вождения заканчивает автономное вождение и переводит транспортное средство 2 на ручное вождение. Ручное вождение это ориентированный на водителя режим вождения, в котором транспортное средство движется на основании операции вождения водителем. Когда транспортное средство прибывает в секцию запрета автономного вождения, ECU 22 автономного вождения определяет, что выполняется условие окончания автономного вождения, и передает сигнал окончания автономного вождения на блок 24 обработки.
[0039] ECU 23 предотвращения пробуксовки представляет собой электронный блок управления, имеющий арифметический блок, например, CPU, запоминающее устройство, например ROM и RAM, схему связи CAN и пр. ECU 23 предотвращения пробуксовки имеет описанные ниже функции, осуществляемые, когда CPU ECU 23 предотвращения пробуксовки загружает и выполняет программы, хранящиеся в запоминающем устройстве.
[0040] ECU 23 предотвращения пробуксовки регистрирует блокировку и пробуксовку колес транспортного средства 2 на основании результата обнаружения внутреннего датчика 212, и управляет каждым из колес для поддержания устойчивости транспортного средства 2. Например, ECU 23 предотвращения пробуксовки управляет давлением тормозной жидкости всех четырех колес на основании результата обнаружения датчика скорости вращения колеса при торможении для предотвращения блокировки колес.
[0041] Блок 24 обработки является устройством управления, которое представляет собой электронный блок управления, имеющий арифметический блок, например, CPU, запоминающее устройство, например, ROM и RAM, схему связи CAN и пр. Блок 24 обработки определяет содержание информации, передаваемой на сервер 3 и принимаемой от него. Блок 24 обработки передает на сервер 3 через блок 26 связи местоположение транспортного средства 2 на карте, полученной с использованием информации местоположения, полученной от приемника 211 GPS и карте в картографической базе данных 216, а также, частично или полностью, информацию, выводимую из внутреннего датчика 212, внешнего датчика 213, стеклоочистителя 215, ECU 22 автономного вождения и ECU 23 предотвращения пробуксовки. Блок 26 связи представляет собой устройство связи, действующее согласно протоколам связи сети N. Блок 24 обработки также выводит сигнал запроса для запрашивания информации на сервер 3 через блок 26 связи и получает информацию от сервера 3.
[0042] Привод 25 представляет собой устройство, которое выполняет управление движением транспортного средства 2. Привод 25 включает в себя, по меньшей мере, общеизвестный привод двигателя, привод тормозов и привод рулевого управления. Привод 25 действует в соответствии с сигналом операции вождения от блока 214 ввода операций, сигналом управления от ECU 22 автономного вождения или сигналом управления от ECU 23 предотвращения пробуксовки.
[0043] Сервер
Сервер 3 может осуществлять связь с транспортными средствами 2. В одном примере, сервер 3 включает в себя блок 31 связи, блок 32 управления, блок 33 хранения и картографическую базу данных 34.
[0044] Блок 31 связи представляет собой устройство связи, действующее согласно протоколам связи сети N. Блок 32 управления представляет собой арифметический блок, например CPU. С функциональной точки зрения, блок 32 управления включает в себя блок 321 получения, блок 322 определения освобождения и блок 323 распространения. Устройство 10 обработки информации, которое включает в себя блок 321 получения, блок 322 определения освобождения и блок 33 хранения, может осуществлять связь с транспортным средством 2. Блок 32 управления не обязан включать в себя блок 323 распространения.
[0045] Блок 321 получения получает состояние движения транспортного средства 2 от транспортного средства 2 посредством связи. Блок 321 получения получает состояние движения от транспортного средства 2 через сеть N и блок 31 связи. Состояние движения, которое представляет собой информацию, указывающую условия при движении транспортного средства 2, включает в себя, по меньшей мере, местоположение транспортного средства 2 на карте. Местоположение транспортного средства 2 на карте представляет собой местоположение транспортного средства 2 на карте в картографической базе данных 216. Состояние движения может включать в себя состояние движения транспортного средства 2, информацию о работе бортового оборудования или информацию о работе системы движения. Состояние движения транспортного средства 2 представляет собой информацию, полученную внутренним датчиком 212 транспортного средства 2. Состояние движения транспортного средства 2 включает в себя, например, скорость. Бортовое оборудование транспортного средства 2 представляет собой, например, стеклоочиститель 215. Система движения транспортного средства 2 представляет собой, например, ECU 23 предотвращения пробуксовки. Блок 321 получения накапливает полученное состояние движения в блоке 33 хранения. Например, в блоке 321 получения может храниться состояние движения транспортного средства 2 совместно с временем получения, или может храниться состояние движения транспортного средства 2 совместно с временем получения для каждой секции (местоположения).
[0046] В блоке 33 хранения хранится местоположение секции запрета автономного вождения на карте в связи с условием ее освобождения, заданным согласно состоянию движения транспортного средства. Местоположение секции запрета автономного вождения на карте является местоположением на карте в описанной ниже картографической базой данных 34. Условие освобождения это требование, подлежащее выполнению для освобождения секции запрета автономного вождения. Условие освобождения устанавливается для каждой секции запрета автономного вождения. Когда условие освобождения выполняется, секция запрета автономного вождения освобождается. Условие освобождения устанавливается на основании состояния движения транспортного средства 2. Термин "освобождение" означает смену секции запрета автономного вождения секцией разрешения автономного вождения. Как именно освобождать секцию запрета автономного вождения, не установлено. Например, секцию запрета автономного вождения можно освобождать, удаляя флаг, указывающий секцию запрета автономного вождения, или удаляя соответствующие данные из таблицы, где хранятся секции запрета автономного вождения. Фраза "местоположение секции запрета автономного вождения на карте сохраняется в связи с условием освобождения" означает, что местоположение и условие освобождения секции запрета автономного вождения сохраняются в блоке 33 хранения в связанном состоянии, что позволяет получать условие освобождения на основании местоположения (секции движения).
[0047] На фиг. 3 показан один пример таблицы освобождения, хранящейся в блоке 33 хранения. Таблица 33A освобождения представляет собой таблицу, которая связывает местоположения секций запрета автономного вождения с условиями их освобождения. В примере, представленном на фиг. 3, местоположение секции запрета автономного вождения "секции A1" связано с условием освобождения "условием K2 освобождения". Местоположение секции запрета автономного вождения "секции A5" связано с условием освобождения "условием K1 освобождения". Местоположение секции запрета автономного вождения "секции B3" связано с условием освобождения "условием K4 освобождения". Местоположение секции запрета автономного вождения "секции B7" связано с условием освобождения "условием K3 освобождения". Местоположение секции запрета автономного вождения "секции C11" связано с условием освобождения "условием K1 освобождения".
[0048] Каждое условие освобождения связано с причиной установления секции запрета автономного вождения. На фиг. 4A, 4B, 4C и 4D показаны пояснительные виды секций запрета автономного вождения. На фиг. 4A препятствие E1 существует в секции A5 дороги, где движется транспортное средство 2, благодаря чему, секция закрывается. Соответственно, по меньшей мере, секция A5 устанавливается как секция запрета автономного вождения. В таких условиях, транспортное средство 2 не может проходить через секцию A5, и поэтому местоположение транспортного средства 2 не изменяется с течением времени. При устранении препятствия E1, транспортное средство 2 может проходить через секцию A5. Поэтому условие K1 освобождения (первое условие освобождения), где заданное количество или более транспортных средств 2 проходит через секцию A5, устанавливается для секции A5, которая является секцией запрета автономного вождения (первая секцией запрета автономного вождения), представленной на фиг. 4A. В таблице 33A освобождения хранится секция A5 в связи с условием K1 освобождения. Таким образом, условие освобождения устанавливается на основании состояний движения транспортных средств 2.
[0049] На фиг. 4B, секция A1 дороги, где движется транспортное средство 2, имеет плохую погоду в силу дождливой погоды, которая препятствует распознаванию датчиком. Соответственно, по меньшей мере, секция A1 устанавливается как секция запрета автономного вождения. В таких условиях, транспортное средство 2 приводится в движение операцией вождения водителя, и поэтому местоположение транспортного средства 2 изменяется. Поэтому не следует устанавливать условие K1 освобождения (первое условие освобождения) для секции A1. Транспортное средство 2 активирует стеклоочиститель 215 при движении в дождливую погоду. Соответственно, условие K2 освобождения (второе условие освобождения), где транспортное средство 2 проходит через секцию запрета автономного вождения без активации стеклоочистителя 215, устанавливается для секции A1 которая является секцией запрета автономного вождения (второй секцией запрета автономного вождения), представленной на фиг. 4B. В таблице 33A освобождения хранится секция A1 в связи с условием K2 освобождения. Таким образом, условие освобождения устанавливается на основании состояния движения транспортного средства 2.
[0050] На фиг. 4C, секция B7 дороги, где движется транспортное средство 2, является дорогой с низким коэффициентом сцепления в силу таких причин, как замерзание, которое препятствует езде посредством автономного вождения. Соответственно, по меньшей мере, секция B7 устанавливается как секция запрета автономного вождения. В таких условиях, местоположение транспортного средства 2 изменяется с операцией вождения водителя, и поэтому условие K1 освобождения (первое условие освобождения) является ненадлежащим. Когда быстрое торможение осуществляется на дороге с низким коэффициентом сцепления, действует ECU 23 предотвращения пробуксовки. Соответственно, условие K3 освобождения (третье условие освобождения), где транспортное средство проходит через секцию запрета автономного вождения без активации ECU 23 предотвращения пробуксовки, устанавливается для секции B7, которая является секцией запрета автономного вождения (третьей секцией запрета автономного вождения), представленной на фиг. 4C. В таблице 33A освобождения хранится секция B7 в связи с условием K3 освобождения. Таким образом, условие освобождения устанавливается на основании состояния движения транспортного средства 2.
[0051] Фиг. 4D демонстрирует ситуацию объединения, где транспортные средства 2 объединяться посредством автономного вождения. В ситуации объединения, скорости транспортных средств 2, движущихся в секции D1 пункта назначения объединения, могут превышать ограничение скорости секции D1 пункта назначения объединения. В этом случае, транспортное средство 2, движущееся в секции B3, не может объединяться с секцией D1 пункта назначения объединения посредством автономного вождения. Соответственно, по меньшей мере, секция B3 устанавливается как секция запрета автономного вождения. При этом, когда разность между скоростями транспортных средств 2, движущихся в секции D1 пункта назначения объединения, и ограничением скорости секции D1 пункта назначения объединения меньше предписанной скорости, транспортное средство 2 в секции B3 может выполнять автономное вождение. Соответственно, условие K4 освобождения (четвертое условие освобождения), где разность между скоростями транспортных средств 2, движущихся в секции D1 пункта назначения объединения соединенный с секцией запрета автономного вождения и ограничением скорости секции D1 пункта назначения объединения меньше предписанной скорости, устанавливается для секции B3 которая является секцией запрета автономного вождения (четвертая секция запрета автономного вождения) представленный на фиг. 4D. В таблице 33A освобождения хранится секция B3 в связи с условием K4 освобождения. Таким образом, условие освобождения устанавливается на основании состояний движения транспортных средств 2.
[0052] Блок 322 определения освобождения определяет, освобождать ли секцию запрета автономного вождения на основании состояния движения транспортного средства 2, полученного блоком 321 получения и местоположения и условия освобождения секции запрета автономного вождения, хранящихся в блоке 33 хранения. Например, при определении освобождения секции запрета автономного вождения в "секции A1", представленной на фиг. 3, блок 322 определения освобождения определяет, освобождать ли секцию запрета автономного вождения на основании состояния движения транспортного средства 2, движущегося в "секции A1", и условия K2 освобождения.
[0053] В более конкретном примере, блок 322 определения освобождения определяет освобождение секции запрета автономного вождения (первой секции запрета автономного вождения), которая связана с условием K1 освобождения, когда заданное количество или более транспортных средств 2 проходит секцию запрета автономного вождения. Блок 322 определения освобождения определяет освобождение секции запрета автономного вождения (второй секции запрета автономного вождения), которая связана с условием K2 освобождения, когда транспортное средство 2 проходит через секцию запрета автономного вождения без активации бортового оборудования. Блок 322 определения освобождения определяет освобождение секции запрета автономного вождения (третьей секции запрета автономного вождения), которая связана с условием K3 освобождения, когда транспортное средство 2 проходит через секцию запрета автономного вождения без активации системы движения. Блок 322 определения освобождения определяет освобождение секции запрета автономного вождения (четвертой секции запрета автономного вождения), которая связана с условием K4 освобождения, когда разность между скоростями транспортных средств 2, движущихся в секции D1 пункта назначения объединения, и ограничением скоростей секции пункта назначения объединения меньше предписанной скорости.
[0054] Блок 323 распространения передает запрашиваемые данные на транспортное средство 2 через блок 31 связи. Например, при наличии запроса о секции запрета автономного вождения от транспортного средства 2, блок 323 распространения передает информацию местоположения секции запрета автономного вождения на транспортное средство 2 через блок 31 связи. Блок 323 распространения передает информацию освобождения на транспортное средство 2, при освобождении секции запрета автономного вождения. В результате, освобождается секция запрета автономного вождения, совместно используемая множеством транспортных средств 2.
[0055] Картографическая база данных 34 идентична по конфигурации картографической базе данных 216 транспортного средства 2. Картографическая база данных 34 может синхронизироваться с картографической базой данных 216 транспортного средства 2 с заданными интервалами.
[0056] Блок-схема последовательности операций
На фиг. 5 показана блок-схема последовательности операций обработки получения устройства 10 обработки информации. Блок-схема последовательности операций начинается с приема инструкции работы устройства 10 обработки информации.
[0057] Согласно фиг. 5, блок 321 получения устройства 10 обработки информации осуществляет обработку получения (S10) для получения состояния движения транспортного средства 2, включающего в себя местоположение транспортного средства 2 на карте. Затем блок 321 получения осуществляет обработку хранения (S12) для накопления состояния движения транспортного средства 2 в блоке 33 хранения совместно со временем получения. На этом блок-схема последовательности операций заканчивается. По окончании блок-схемы последовательности операций, блок-схема последовательности операций может начинаться в заданном временном режиме. В этом случае, состояние движения транспортного средства 2 сохраняется в хронологическом порядке.
[0058] На фиг. 6 показана блок-схема последовательности операций обработки освобождения устройства 10 обработки информации. Блок-схема последовательности операций выполняется, по меньшей мере, после однократного выполнения блок-схемы последовательности операций, представленной на фиг. 5, и когда задается секция запрета автономного вождения, которая является целью определения освобождения. Блок-схема последовательности операций может осуществляться параллельно блок-схеме последовательности операций, представленной на фиг. 5.
[0059] Согласно фиг. 6, блок 322 определения освобождения устройства 10 обработки информации осуществляет обработку определения освобождения (S14) для получения условия освобождения в отношении местоположения секции запрета автономного вождения в качестве цели определения. Например, блок 322 определения освобождения получает условие освобождения связанный с местоположением секции запрета автономного вождения в качестве цели определения со ссылкой на таблицу 33A освобождения. Затем блок 322 определения освобождения производит определение в соответствии с условием освобождения.
[0060] Когда секция запрета автономного вождения в качестве цели определения связана с условием K1 освобождения, производится определение в отношении ситуации, представленной на фиг. 4A. В этом случае, блок 322 определения освобождения выполняет блок-схему последовательности операций, представленную на фиг. 7. Согласно фиг. 7, блок 322 определения освобождения осуществляет обработку определения (S20) для определения, равно ли количество транспортных средств, проходящих через секцию запрета автономного вождения в качестве цели определения, заданному значению или более, на основании данных, накопленных в блоке 33 хранения. Когда количество транспортных средств, проходящих через секцию запрета автономного вождения в качестве цели определения, больше заданного значения, блок 322 определения освобождения осуществляет обработку освобождения (S22) для удаления секции запрета автономного вождения в качестве цели определения из блока 33 хранения. Когда обработка освобождения (S22) заканчивается, или когда при обработке определения (S20) определяется, что количество транспортных средств, проходящих через секцию запрета автономного вождения в качестве цели определения, не равно заданному значению или более, блок-схема последовательности операций, представленная на фиг. 7, заканчивается.
[0061] Когда секция запрета автономного вождения в качестве цели определения связана с условием K2 освобождения, производится определение в отношении ситуации, представленной на фиг. 4B. В этом случае, блок 322 определения освобождения выполняет блок-схему последовательности операций, представленную на фиг. 8. Согласно фиг. 8, блок 322 определения освобождения осуществляет обработку определения (S30) для определения, проходит ли транспортное средство 2 через секцию запрета автономного вождения в качестве цели определения без активации стеклоочистителя 215, на основании данных, накопленных в блоке 33 хранения. Когда транспортное средство 2 проходит через секцию запрета автономного вождения в качестве цели определения без активации стеклоочистителя 215, блок 322 определения освобождения осуществляет обработку освобождения (S32) для удаления секции запрета автономного вождения в качестве цели определения из блока 33 хранения. Когда обработка освобождения (S32) заканчивается, или когда при обработке определения (S30) определяется, что транспортное средство 2 активирует стеклоочиститель 215 при движении в секции запрета автономного вождения в качестве цели определения, блок-схема последовательности операций, представленная на фиг. 8, заканчивается.
[0062] Когда секция запрета автономного вождения в качестве цели определения связана с условием K3 освобождения, производится определение в отношении ситуации, представленной на фиг. 4C. В этом случае, блок 322 определения освобождения выполняет блок-схему последовательности операций, представленную на фиг. 9. Согласно фиг. 9, блок 322 определения освобождения осуществляет обработку определения (S40) для определения, проходит ли транспортное средство 2 через секцию запрета автономного вождения в качестве цели определения без активации ECU 23 предотвращения пробуксовки, на основании данных, накопленных в блоке 33 хранения. Когда транспортное средство 2 проходит через секцию запрета автономного вождения в качестве цели определения без активации ECU 23 предотвращения пробуксовки, блок 322 определения освобождения осуществляет обработку освобождения (S42) для удаления секции запрета автономного вождения в качестве цели определения из блока 33 хранения. Когда обработка освобождения (S42) заканчивается, или когда при обработке определения (S40) определяется, что транспортное средство 2 активирует ECU 23 предотвращения пробуксовки при движении в секции запрета автономного вождения в качестве цели определения, блок-схема последовательности операций, представленная на фиг. 9, заканчивается.
[0063] Когда секция запрета автономного вождения в качестве цели определения связана с условием K4 освобождения, производится определение в отношении ситуации, представленной на фиг. 4D. В этом случае, блок 322 определения освобождения выполняет блок-схему последовательности операций, представленную на фиг. 10. Согласно фиг. 10, блок 322 определения освобождения осуществляет обработку определения (S50) для определения, на основании данных, накопленных в блоке 33 хранения, меньше ли разность между скоростями транспортных средств 2, движущихся в секции D1 пункта назначения объединения соединенный с секцией запрета автономного вождения в качестве цели определения, и ограничением скорости секции D1 пункта назначения объединения, предписанной скорости. Когда разность между скоростями транспортных средств 2, движущихся в секции D1 пункта назначения объединения и ограничением скорости секции D1 пункта назначения объединения меньше предписанной скорости, блок 322 определения освобождения осуществляет обработку освобождения (S52) для удаления секции запрета автономного вождения в качестве цели определения из блока 33 хранения. Когда обработка освобождения (S52) заканчивается, или когда при обработке определения (S50) определяется, что разность между скоростями транспортных средств 2, движущихся в секции D1 пункта назначения объединения и ограничением скорости секции D1 пункта назначения объединения не меньше предписанной скорости, блок-схема последовательности операций, представленная на фиг. 10, заканчивается.
[0064] По окончании блок-схем последовательности операций, представленных на фиг. 7-10, обработка возвращается к фиг. 6. блок 323 распространения устройства 10 обработки информации распространяет информацию о секции запрета автономного вождения на транспортное средство 2.
[0065] Эффекты работы варианта осуществления
В устройстве 10 обработки информации согласно варианту осуществления, в блоке 33 хранения хранится местоположение секции запрета автономного вождения на карте в связи с условием ее освобождения. Блок 322 определения освобождения определяет, освобождать ли секцию запрета автономного вождения на основании состояния движения транспортного средства 2 и местоположения и условия освобождения секции запрета автономного вождения. Таким образом, устройство 10 обработки информации может определять устранение причины установления секции запрета автономного вождения с использованием условия освобождения, установленного для каждой секции запрета автономного вождения на основании состояния движения транспортного средства 2. Соответственно, устройство 10 обработки информации может освобождать секцию запрета автономного вождения, когда причина установления секции запрета автономного вождения устранена.
[0066] Когда первая секция запрета автономного вождения устанавливается по причине того, что дорога заблокирована препятствием и т.п., устройство 10 обработки информации может определять устранение причины установления первой секции запрета автономного вождения, на основании количества проходящих транспортных средств 2.
[0067] Когда секция запрета автономного вождения устанавливается по причине ливня, устройство 10 обработки информации может определять устранение причины установления секции запрета автономного вождения на основании рабочей информации о бортовом оборудовании, например, стеклоочистителе и стеклообогревателе.
[0068] Когда секция запрета автономного вождения устанавливается по причине возникновения пробуксовки вследствие замерзания и пр., устройство 10 обработки информации может определять устранение причины установления секции запрета автономного вождения на основании рабочей информации о системе движения, например, системе предотвращения пробуксовки.
[0069] Кроме того, когда секция запрета автономного вождения устанавливается по причине того, что транспортное средство не может объединяться с секцией пункта назначения объединения посредством автономного вождения, поскольку скорости транспортных средств, движущихся в секции пункта назначения объединения, превышают ограничение скорости секции пункта назначения объединения, устройство 10 обработки информации может определять устранение причины установления секции запрета автономного вождения на основании разности между скоростями транспортных средств, движущихся в секции пункта назначения объединения, и ограничением скорости.
[0070] Раскрытый вариант осуществления может осуществляться в режимах, к которым различные конфигурации и модификации применяются на основании знания специалистов в данной области техники.
[0071] Модификация конфигурации
ECU может состоять из множества электронных блоков управления. Сервер 3 может состоять из множества серверов.
[0072] Модификация бортового оборудования
Бортовое оборудование может представлять собой, например, стеклообогреватель, который препятствует конденсации влаги на лобовом стекле независимо от наличия стеклоочистителя.
[0073] Модификация системы движения
Система движения не ограничивается ECU 23 предотвращения пробуксовки, раскрытым согласно варианту осуществления. Например, модифицированный ECU предотвращения пробуксовки может определять занос задних колес или занос передних колес на основании результата обнаружения датчика угловой скорости рыскания и прилагать тормозное усилие к любому из четырех колес в соответствии с направлением заноса для генерации стабилизирующего момента таким образом, что направление заноса подавляется. Даже с таким ECU предотвращения пробуксовки, устройство обработки информации может определять устранение причины установления секции запрета автономного вождения на основании рабочей информации системы движения.
Группа изобретений относится к устройству и способу обработки информации. Устройство, осуществляющее способ обработки информации, включает в себя блок хранения, выполненный с возможностью хранения местоположения секции запрета автономного вождения на карте в связи с условием освобождения, установленным на основании состояния движения транспортного средства. Блок управления, выполненный с возможностью получения состояния движения транспортного средства, включающего в себя местоположение транспортного средства на карте от транспортного средства посредством связи. Причем блок управления выполнен с возможностью определения, освобождать ли секцию запрета автономного вождения на основании полученного состояния движения транспортного средства, местоположения секции запрета автономного вождения и условия освобождения секции запрета автономного вождения. Обеспечивается освобождение секции запрета автономного вождения, когда причины установления секций запрета автономного вождения устранены. 2 н. и 10 з.п. ф-лы. 13 ил.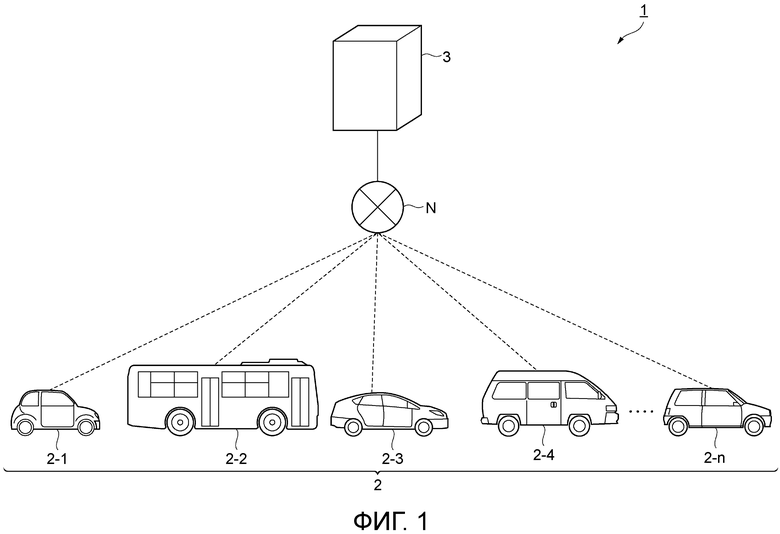
1. Устройство (10) обработки информации, способное осуществлять связь с транспортным средством (2), содержащее:
блок (33) хранения, выполненный с возможностью хранения местоположения секции запрета автономного вождения на карте в связи с условием освобождения, установленным на основании состояния движения транспортного средства (2); и
блок (32) управления, выполненный с возможностью получения состояния движения транспортного средства (2), включающего в себя местоположение транспортного средства (2) на карте от транспортного средства (2) посредством связи, причем блок (32) управления выполнен с возможностью определения, освобождать ли секцию запрета автономного вождения на основании полученного состояния движения транспортного средства (2), местоположения секции запрета автономного вождения и условия освобождения секции запрета автономного вождения, причем местоположение и условие освобождения хранится в блоке (33) хранения, при этом
блок (33) хранения выполнен с возможностью хранения местоположения первой секции запрета автономного вождения, которая является секцией запрета автономного вождения на карте в связи с первым условием освобождения в качестве условия освобождения, где количество транспортных средств (2), проходящих через первую секцию запрета автономного вождения, оказывается большим или равным заданному количеству, и
блок (32) управления выполнен с возможностью определения освобождения первой секции запрета автономного вождения, когда количество транспортных средств (2), проходящих через первую секцию запрета автономного вождения, больше или равно заданному количеству.
2. Устройство (10) обработки информации по п. 1, в котором
первая секция запрета автономного вождения является секцией, заданной как секция запрета автономного вождения вследствие наличия препятствия.
3. Устройство (10) обработки информации по п. 1 или 2, в котором
блок (33) хранения выполнен с возможностью хранения местоположения второй секции запрета автономного вождения, которая является секцией запрета автономного вождения на карте в связи со вторым условием освобождения в качестве условия освобождения, где транспортное средство (2) проходит через вторую секцию запрета автономного вождения без активации бортового оборудования, и
блок (32) управления выполнен с возможностью получения рабочей информации о бортовом оборудовании от транспортного средства (2) в качестве состояния движения и определения освобождения второй секции запрета автономного вождения, когда транспортное средство (2) проходит через вторую секцию запрета автономного вождения без активации бортового оборудования.
4. Устройство (10) обработки информации по п. 3, в котором
вторая секция запрета автономного вождения является секцией, заданной как секция запрета автономного вождения вследствие дождливой погоды, и бортовое оборудование является стеклоочистителем (215).
5. Устройство (10) обработки информации по п. 1 или 2, в котором
блок (33) хранения выполнен с возможностью хранения местоположения третьей секции запрета автономного вождения, которая является секцией запрета автономного вождения на карте в связи с третьим условием освобождения в качестве условия освобождения, где транспортное средство (2) проходит через третью секцию запрета автономного вождения без активации системы движения, и
блок (32) управления выполнен с возможностью получения рабочей информации о системе движения от транспортного средства (2) в качестве состояния движения и определения освобождения третьей секции запрета автономного вождения, когда транспортное средство (2) проходит через третью секцию запрета автономного вождения без активации системы движения.
6. Устройство (10) обработки информации по п. 5, в котором
третья секция запрета автономного вождения является секцией, заданной как секция запрета автономного вождения вследствие того, что секция является дорогой с низким коэффициентом сцепления, и система движения является системой для предотвращения пробуксовки.
7. Устройство (10) обработки информации по п. 1 или 2, в котором
блок (33) хранения выполнен с возможностью хранения местоположения четвертой секции запрета автономного вождения, которая является секцией запрета автономного вождения на карте в связи с четвертым условием освобождения в качестве условия освобождения, где разность между скоростью транспортного средства (2), движущегося в секции пункта назначения объединения, соединенной с четвертой секцией запрета автономного вождения, и ограничением скорости секции пункта назначения объединения меньше предписанной скорости, и
блок (32) управления выполнен с возможностью определения освобождения четвертой секции запрета автономного вождения, когда разность между скоростью транспортного средства (2), движущегося в секции пункта назначения объединения, и ограничением скорости секции пункта назначения объединения меньше предписанной скорости.
8. Устройство (10) обработки информации по п. 7, в котором
четвертая секция запрета автономного вождения является секцией, имеющей точку объединения впереди секции.
9. Способ обработки информации, содержащий этапы, на которых:
сохраняют в блоке (33) хранения местоположение секции запрета автономного вождения на карте в связи с условием освобождения, установленным на основании состояния движения транспортного средства (2);
получают блоком (32) управления состояние движения транспортного средства (2), включающее в себя местоположение транспортного средства (2) на карте, посредством связи от транспортного средства (2); и
определяют, блоком (32) управления, освобождать ли секцию запрета автономного вождения на основании полученного состояния движения транспортного средства (2), местоположения секции запрета автономного вождения и условия освобождения секции запрета автономного вождения, причем местоположение и условие освобождения хранится в блоке (33) хранения, при этом
секция запрета автономного вождения является первой секцией запрета автономного вождения, заданной как секция запрета автономного вождения вследствие наличия препятствия,
условие освобождения является первым условием освобождения, где количество транспортных средств (2), проходящих через первую секцию запрета автономного вождения, оказывается большим или равным заданному количеству, и
первая секция запрета автономного вождения определяется блоком (32) управления как подлежащая освобождению, когда количество транспортных средств (2), проходящих через первую секцию запрета автономного вождения, больше или равно заданному количеству.
10. Способ обработки информации по п. 9, в котором
секция запрета автономного вождения является второй секцией запрета автономного вождения, заданной как секция запрета автономного вождения вследствие дождливой погоды,
условие освобождения является вторым условием освобождения, где транспортное средство (2) проходит через вторую секцию запрета автономного вождения без активации бортового оборудования, и
рабочая информация о бортовом оборудовании в качестве состояния движения получается блоком (32) управления от транспортного средства (2), и вторая секция запрета автономного вождения определяется блоком (32) управления как подлежащая освобождению, когда транспортное средство (2) проходит через вторую секцию запрета автономного вождения без активации бортового оборудования.
11. Способ обработки информации по п. 9, в котором
секция запрета автономного вождения является третьей секцией запрета автономного вождения, заданной как секция запрета автономного вождения вследствие того, что секция является секцией дороги с низким коэффициентом сцепления,
условие освобождения является третьим условием освобождения, где транспортное средство (2) проходит через третью секцию запрета автономного вождения без активации системы движения, и
рабочая информация о системе движения получается блоком (32) управления от транспортного средства (2) в качестве состояния движения, и третья секция запрета автономного вождения определяется блоком (32) управления как подлежащая освобождению, когда транспортное средство (2) проходит через третью секцию запрета автономного вождения без активации системы движения.
12. Способ обработки информации по п. 9, в котором
секция запрета автономного вождения является четвертой секцией запрета автономного вождения, заданной как секция, имеющая точку объединения впереди секции,
условие освобождения является четвертым условием освобождения, где разность между скоростью транспортного средства (2), движущегося в секции пункта назначения объединения, соединенной с четвертой секцией запрета автономного вождения, и ограничением скорости секции пункта назначения объединения меньше предписанной скорости, и
четвертая секция запрета автономного вождения определяется блоком (32) управления как подлежащая освобождению, когда разность между скоростью транспортного средства (2), движущегося в секции пункта назначения объединения, и ограничением скорости секции пункта назначения объединения меньше предписанной скорости.
| WO 2013034347 A2, 14.03.2013 | |||
| DE 102005057251 A1, 06.06.2007 | |||
| WO 2016063383 A1, 28.04.2016 | |||
| СПОСОБ СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ О ТРАНСПОРТНЫХ ПОТОКАХ НА АВТОДОРОГАХ С ИСПОЛЬЗОВАНИЕМ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ДАННЫХ | 2010 |
|
RU2442963C1 |

