Изобретение относится к области радиотехники, и, в частности, радионавигации с использованием сигналов глобальных навигационных спутниковых систем (ГНСС).
Предлагаемые способ и реализующее его устройство могут быть использованы в помехозащищенной навигационной аппаратуре потребителей ГНСС, работоспособность которой требуется обеспечить при воздействии помех всех видов.
Из уровня техники известен способ пространственно-временной режекции помех, реализованный по схеме компенсатора помех на базе антенной решетки (АР), в котором адаптивное управление диаграммой направленности (ДН) АР осуществляется по методу наименьших квадратов [1]. Схема компенсатора помех предполагает наличие опорного и компенсационных каналов.
Существенный недостаток данного способа заключается в том, что при использовании АР с центральной симметрией расположения антенных элементов в случае воздействия некоррелированных помех, количество которых равно числу степеней свободы АР, существуют такие (особые) направления прихода помех, для которых компенсатор не может обеспечить их эффективное подавление [2].
Известно, что в случае воздействия некоррелированных помех ранг корреляционной матрицы (КМ) помех на выходе АР равен их количеству. Особенностью планарной АР с центральной симметрией является то, что фазовые набеги на противоположных относительно центра антенных элементах равны по модулю, но противоположны по знаку (при выборе начала координат в центре симметрии АР). Если в результате воздействия на М-элементную АР М-1 некоррелированных помех их фазовые набеги на противоположных антенных элементах равны, ранг КМ помех становится меньше числа действующих помех. В работах [3, 4] показано, что в этом случае не удается сформировать нули ДН АР в направлениях всех помех, то есть подавление помех становится невозможным.
В качестве прототипа выбирается способ пространственно-временной режекции помех в аппаратуре потребителей глобальных навигационных спутниковых систем [5], включающий в себя операции М-канального приема, усиления, фильтрации, преобразования частоты, многоразрядного аналого-цифрового преобразования, цифровой фильтрации, квадратурного преобразования оцифрованных сигнальных выборок, пространственно-временной компенсации помех по методу наименьших квадратов, квантования, обработки в навигационном процессоре [5].
Этот способ реализуется с помощью компенсатора помех с алгоритмом адаптации по методу наименьших квадратов, который содержит последовательно соединенные М-элементную АР, радиочастотные приемные тракты, многоразрядные аналого-цифровые преобразователи, цифровые тракты обработки сигналов, блок пространственно-временной обработки сигналов, квантователи, блок навигационного процессора [5].
Задачей, решаемой заявленным изобретением, является создание способа и устройства пространственно-временной режекции помех в аппаратуре потребителей ГНСС, нацеленного на повышение эффективности подавления помех, а также устранение недостатка компенсатора помех с центральной симметрией АР, а именно невозможности обеспечить подавление помех, приходящих с некоторых особых направлений (направления, для которых фазовые набеги нескольких помех на противоположных относительно центра симметрии антенных элементах АР одинаковы, из-за чего компенсатор помех не способен сформировать нули ДН АР в направлении всех источников помех), которые возникают при равенстве общего количества помех числу степеней свободы АР.
Технический результат заявленного изобретения заключается в повышении эффективности подавления помех за счет формирование максимума (луча) ДН или фокусировки в направлении прихода полезного сигнала от навигационного космического аппарата (НКА) при наличии информации об ориентации АР, причем процедуры фокусировки и компенсации помех разделены.
Технический результат заявленного способа достигается за счет того, что перед пространственно-временной компенсацией помех по методу наименьших квадратов выполняют операции расчета и усреднения КМ (размерностью М×М) аддитивной смеси полезных сигналов, помех и собственных шумов радиочастотных приемных трактов, производят ее разложение по системе собственных векторов, оценивают количество действующих помех J, вычисляют N векторов весовых коэффициентов (ВВК) для формирования N лучей ДН АР как проекции фокусирующих векторов, рассчитанных на основе данных об угловых положениях НКА, полученных из эфемерид, и ориентации АР, на шумовое подпространство, образуемое собственными векторами КМ, соответствующими ее M-J наименьшим собственным значениям, размерность которого определяется количеством действующих помех, и умножают сигнальные выборки на рассчитанные N лучеобразующих векторов, подавая результат умножения на опорные каналы независимых блоков компенсации помех, и собственные векторы, соответствующие М-1 наибольшим собственным значениям КМ, подавая результат умножения на компенсационные каналы блоков компенсации помех, причем в алгоритм компенсации введено упрощение, заключающееся в том, что при адаптивной подстройке весовых коэффициентов используется только знаковый разряд отсчетов сигналов с выходов многоотводных линий задержки компенсационных каналов блоков компенсации помех.
Заявленный способ реализует устройство. Технический результат заявленного устройства достигается за счет того, что перед блоком пространственно-временной обработки сигналов в него введен блок векторно-матричного умножения, состоящий из последовательно соединенных блока вычисления КМ, блока усреднения КМ, блока разложения КМ по системе собственных векторов и подготовки векторов весовых коэффициентов (ВВК), а также векторного умножителя, и имеющий M+1 входов, М из которых соединены с выходами цифровых трактов обработки сигналов, а информационный вход, предназначенный для ввода азимутальных углов и углов места, характеризующих направления на навигационные космические аппараты (НКА) относительно АР, соединен с выходом блока навигационного процессора, и М-1+N выходов, соединенных с входами блока пространственно-временной обработки сигналов, включающего в себя N блоков компенсации помех, каждый из которых состоит из блока опорного канала, в который поступает сигнал одного из N лучей ДН АР, и М-1 блоков компенсационного канала, каждый из которых построен на многоотводной линии задержки, сигнал с выходов которой подается на входы элементарных адаптивных ячеек, выполненных с возможностью подстройки весовых коэффициентов по методу наименьших квадратов, причем при расчете весового коэффициента в элементарных адаптивных ячейках используется только знаковый разряд отсчетов сигналов с выходов многоотводных линий задержки, а N выходов блока пространственно-временной обработки сигналов служат входами квантователей, выходы которых соединены с входами блока навигационного процессора соответственно, выход которого соединен с информационным входом блока векторно-матричного умножения.
Сущность изобретения поясняется чертежами.
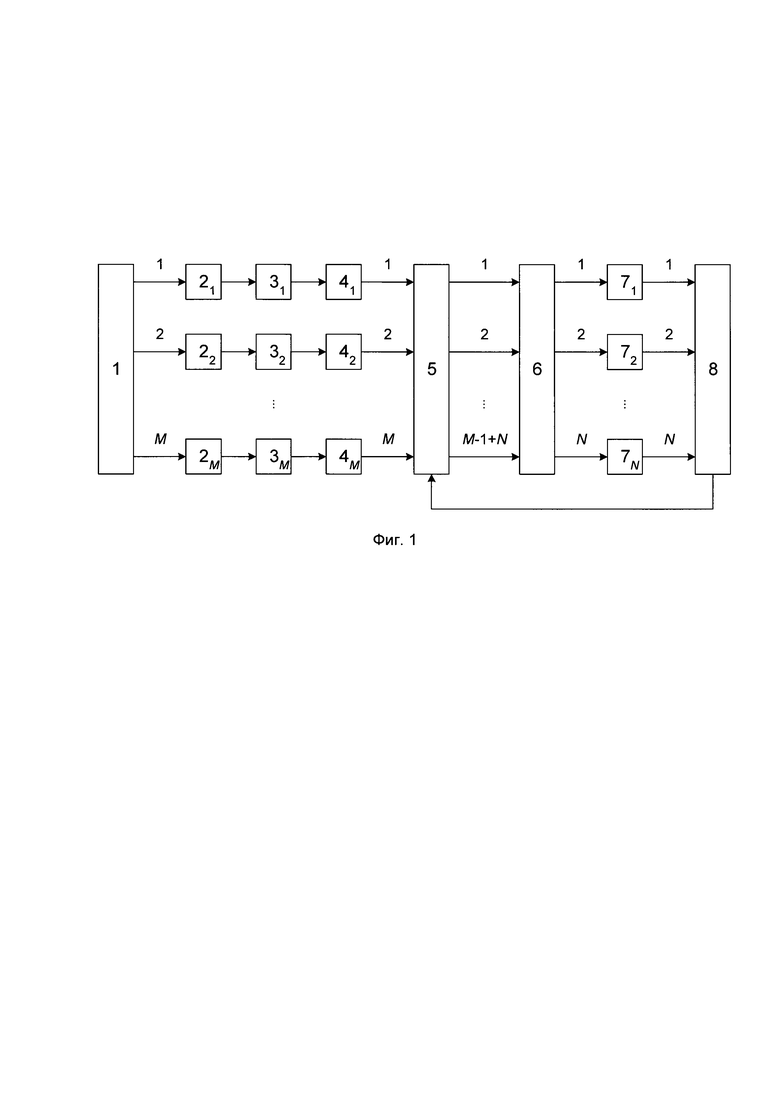
На фиг. 1 представлена блок-схема устройства, реализующего предлагаемый способ.
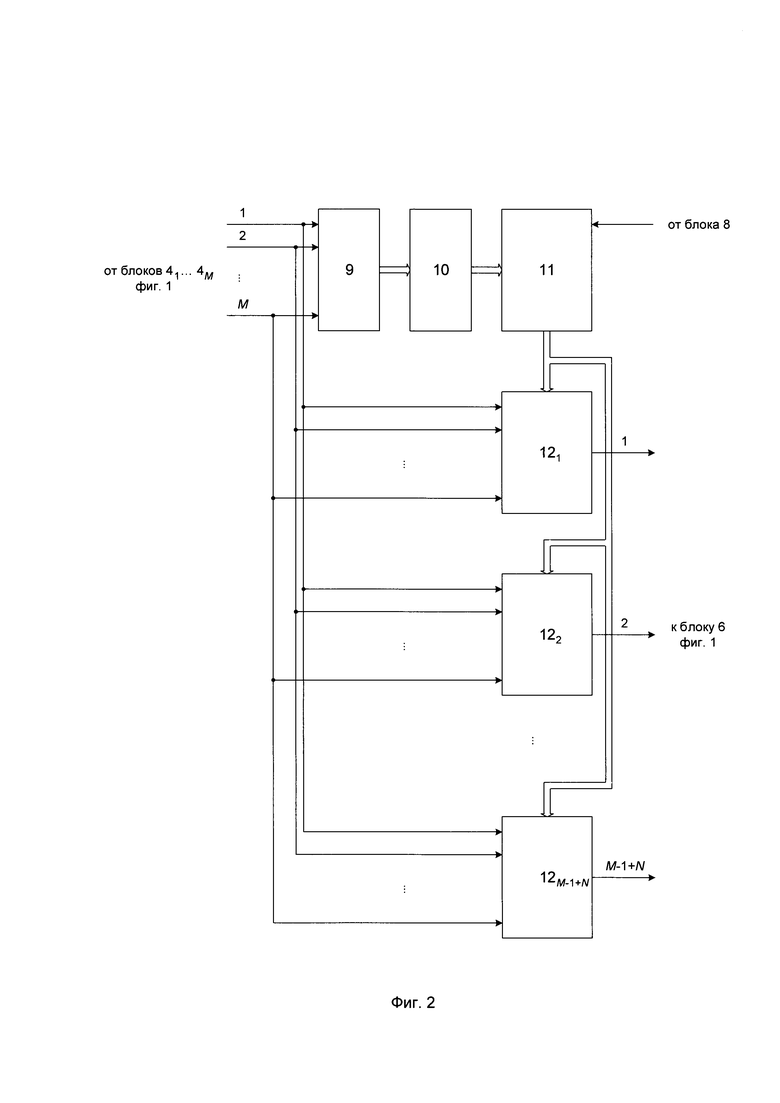
На фиг. 2 приведена блок-схема блока векторно-матричного умножения 5.
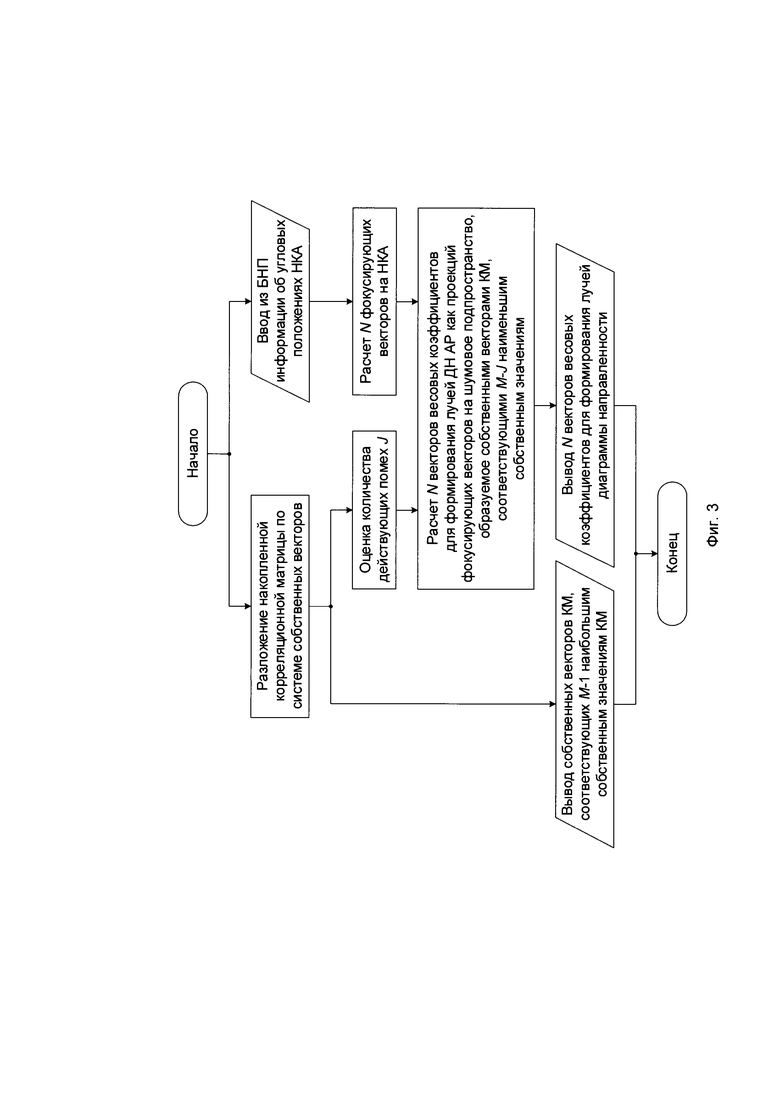
На фиг. 3. изображена блок-схема алгоритма работы блока разложения КМ по системе собственных векторов и подготовки ВВК 10.
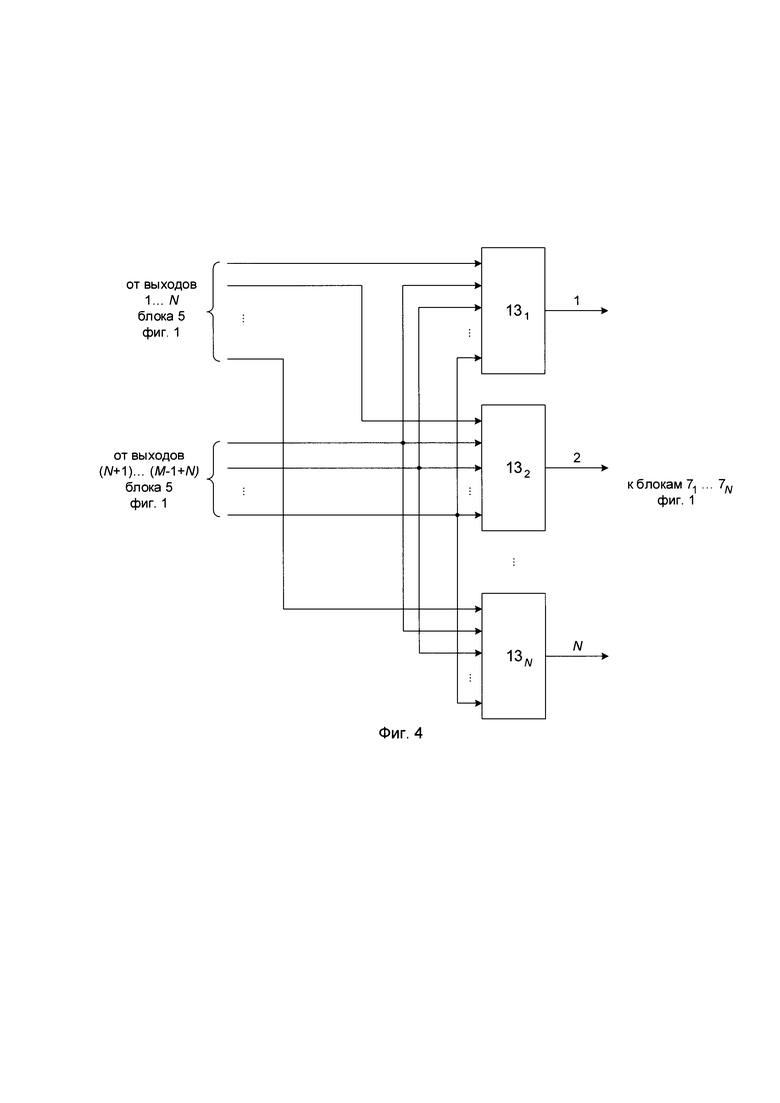
На фиг. 4 приведена блок-схема блока пространственно-временной обработки сигналов 6.
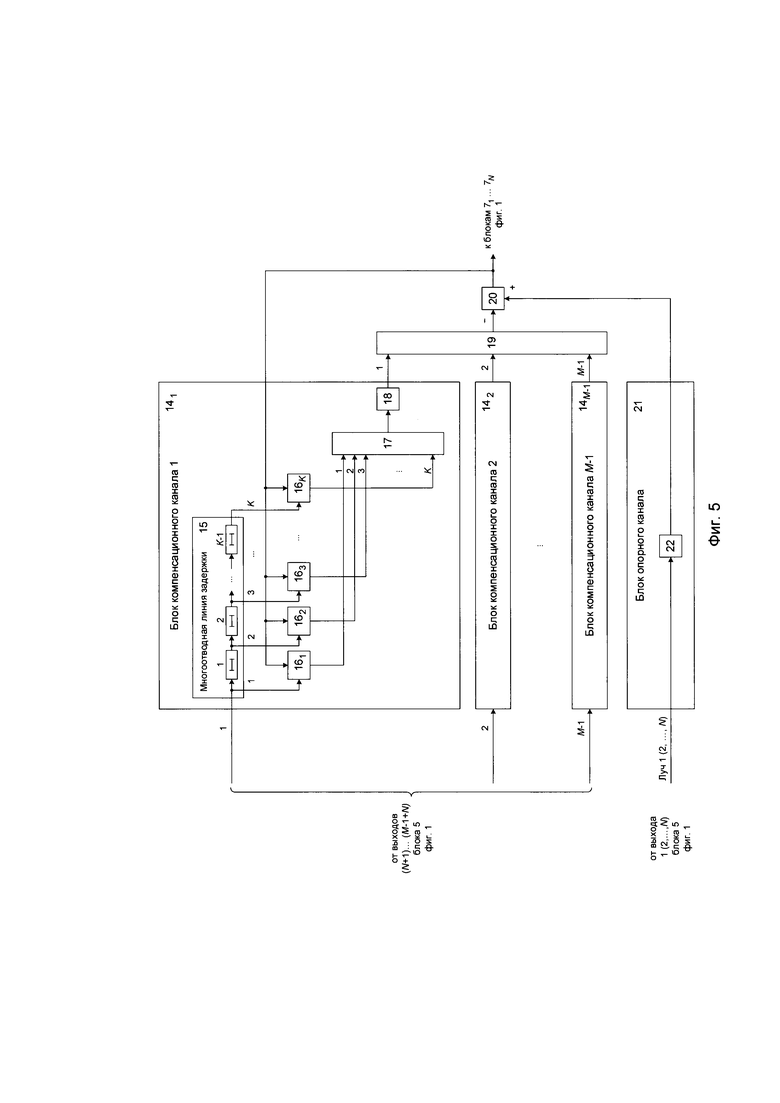
На фиг. 5 изображена блок-схема блока компенсации помех 131 (132, …, 13N).
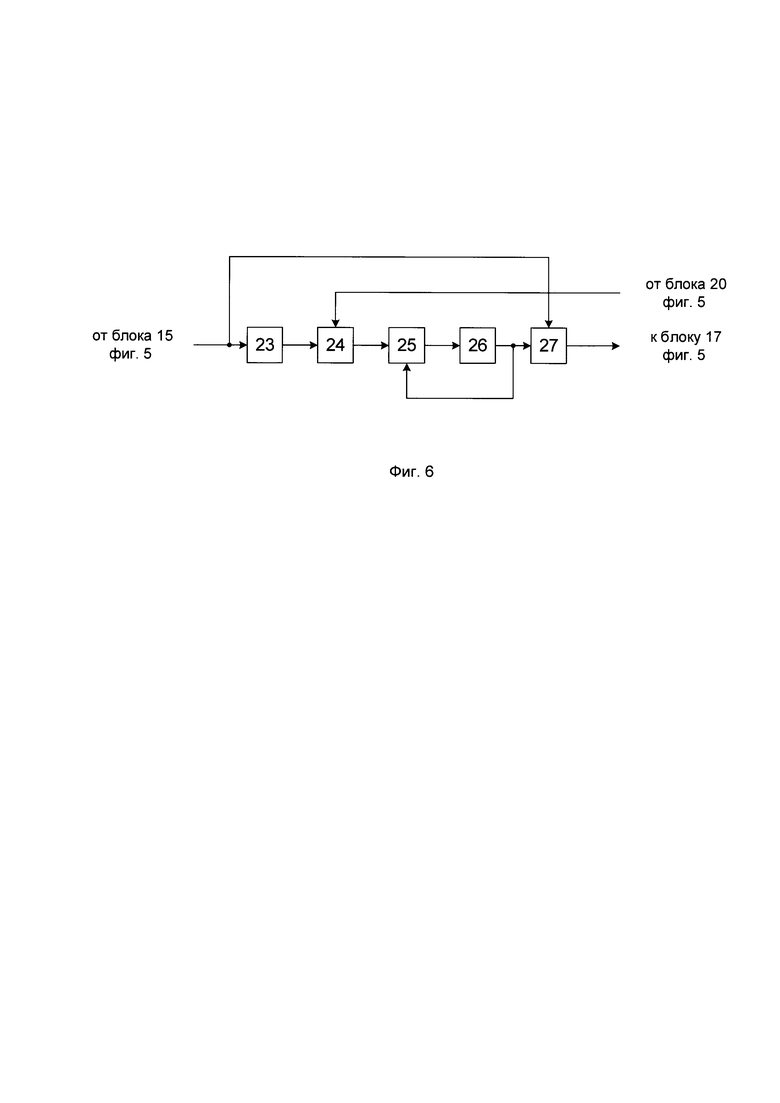
На фиг. 6 изображена блок-схема элементарной адаптивной ячейки 151 (152, …, 15К).
На фиг. 1 обозначены следующие позиции:
1 - М-элементная АР;
21 - 2М - радиочастотные приемные тракты;
31 - 3М - многоразрядные аналого-цифровые преобразователи;
41 - 4М - цифровые тракты обработки сигналов;
5 - блок векторно-матричного умножения;
6 - блок пространственно-временной обработки сигналов;
71 - 7N - квантователи;
8 - блок навигационного процессора (БНП).
Все элементы устройства пространственно-временной режекции помех в аппаратуре потребителей ГНСС имеют связи между собой. Устройство пространственно-временной режекции помех в аппаратуре потребителей ГНСС на фиг. 1 состоит из последовательно соединенных М-элементной АР 1, радиочастотных приемных трактов 21 - 2М, многоразрядных аналого-цифровых преобразователей 31 - 3М, цифровых трактов обработки сигналов 41 - 4М, блока векторно-матричного умножения 5, блока пространственно-временной обработки сигналов 6, квантователей 71 - 7N, блока навигационного процессора 8, выход которого соединен с информационным входом блока векторно-матричного умножения.
Блок-схема на фиг. 1 работает следующим образом. СВЧ-сигналы с выхода каждого из М антенных элементов АР 1 поступают соответственно на М входов радиочастотных приемных трактов 21 (22, …, 2М), где производится их усиление, фильтрация и преобразование частоты, затем с М выходов радиочастотных приемных трактов сигналы на промежуточной частоте поступают соответственно на М входов многоразрядных аналого-цифровых преобразователей 31 (32, …, 3 м). В цифровых трактах обработки сигналов 41 (42, …, 4М) выполняется фильтрация и квадратурное преобразование оцифрованных сигнальных выборок, после чего они поступают соответственно на М входов блока векторно-матричного умножения 5, а на его информационный вход параллельно поступает информация об угловых положениях НКА (азимутальных углов и углов места, характеризующих направления на НКА относительно АР). В блоке 5 выполняются операции расчета и усреднения КМ (размерностью М×М) аддитивной смеси полезных сигналов, помех и собственных шумов радиочастотных приемных трактов, выполняется ее разложение по системе собственных векторов, подготовка ВВК и умножение на них входных выборок. Сигналы с М-1+N выходов блока векторно-матричного умножения 5 подаются соответственно на М-1+N входов блока пространственно-временной обработки сигналов 6, где осуществляется пространственно-временная компенсация помех по методу наименьших квадратов, после чего сигналы с N выходов блока 6 поступают соответственно на N входов квантователей 71 (72, …, 7N), далее сигналы с N выходов квантователей поступают на N входов блока навигационного процессора 8, где производится их обработка.
Блок-схема блока векторно-матричного умножения 5 приведена на фиг. 2.
Перечень фигур на фиг. 2:
9 - блок вычисления КМ;
10 - блок усреднения КМ (фильтр первого порядка);
11 - блок разложения КМ по системе собственных векторов и подготовки ВВК;
121 - 12М-1+N - векторный умножитель.
Блок векторно-матричного умножения 5 состоит из последовательно соединенных блока вычисления корреляционной матрицы 9, блока усреднения корреляционной матрицы (фильтра первого порядка) 10, блока разложения корреляционной матрицы по системе собственных векторов и подготовки векторов весовых коэффициентов 11, а также векторных умножителей 121 - 12М-1+N.
В блоке векторно-матричного умножения производится расчет и накопление КМ аддитивной смеси полезных сигналов, помех и собственных шумов радиочастотных приемных трактов, выполняется ее разложение по системе собственных векторов, подготовка N ВВК для формирования лучей ДН АР как проекций векторов фокусировки, рассчитанных на основе данных об угловых положениях НКА, полученных из эфемерид, и ориентации АР, на подпространство собственных шумов радиочастотных приемных трактов, производится умножение сигнальных выборок на проекции векторов фокусировки и собственные векторы КМ, соответствующие ее М-1 наибольшим собственным значениям.
Блок-схема работает следующим образом: сигнальные выборки с выходов цифровых трактов обработки сигналов 41 (42, …, 4М) поступают на входы блока вычисления КМ 9, где по ним с темпом частоты дискретизации рассчитывается мгновенная КМ размерности М×М, в блоке усреднения КМ 10 элементы мгновенной КМ усредняется фильтром первого порядка и подаются на вход блока разложения КМ по системе собственных векторов и подготовки ВВК 11.
Блок-схема алгоритма работы блока 11 изображена на фиг. 3. В блоке 11 производится разложение КМ по системе собственных векторов, после чего производится оценка количества действующих помех J. Параллельно с этим при наличии информации об ориентации АР на информационный вход векторного умножителя 12 осуществляется ввод из блока навигационного процессора информации об угловых положениях НКА (азимутальных углов и углов места, характеризующих направления на НКА относительно АР), по этим данным производится расчет N фокусирующих векторов на НКА, где N - количество лучей ДН АР, которые требуется сформировать. Далее с учетом оценки количества помех J производится расчет N ВВК для формирования лучей как проекций фокусирующих векторов на шумовое подпространство, образуемое собственными векторами КМ, соответствующими ее M-J наименьшим собственным значениям. В векторных умножителях 121 (122, …, 12М-1+N) производится умножение выборок сигналов с выходов цифровых трактов обработки сигналов 41 (42, …, 4М) на ВВК, рассчитанные в блоке 11. На векторные умножители с номерами 1...N выводятся N ВВК для формирования лучей ДН АР, сигналы с выходов векторных умножителей 121 (122, …, 12N) подаются на входы блоков опорного канала блоков компенсации помех 131 (132, …, 13N). На векторные умножители с номерами (N+1)…(М-1+N) подаются собственные векторы КМ, соответствующие М-1 наибольшим собственным значениям КМ, при действии помех умножение на них входных выборок позволяет выделить помеховые сигналы и обеспечить более эффективное их подавление. Сигналы с выходов векторных умножителей 12N+1 (12N+2, …, 12m-1+N) подаются на входы блоков компенсационного канала блока компенсации помех 131 (132, …, 13N).
Блок-схема блока пространственно-временной обработки сигналов 6 приведена на фиг. 4.
Блок пространственно-временной компенсации помех имеет М-1+N входов и N выходов и включает в себя N независимых блоков компенсации помех 131 (132, …, 13N), каждый из которых состоит из блока опорного канала 22, на каждый из которых поступает сигнал одного из лучей ДН АР, и М-1 блоков компенсационных каналов 141 (142, …, 14m-1), каждый из которых построен на линии задержки с К отводами, сигнал из каждого отвода поступает на элементарную адаптивную ячейку, реализующую алгоритм подстройки весового коэффициента по методу наименьших квадратов. Выходы блока 5 с номерами 1…N подключаются ко входам блоков опорного канала блоков компенсации помех 131 (132, …, 13N), а выходы с номерами (N+1)…(М-1+N) - ко входам блоков компенсационных каналов 141 (142, …, 14M-1).
Блок-схема блока компенсации помех 131 (132, …, 13N) изображена на фиг.5.
Перечень фигур на фиг. 5:
141 - 14M-1 - блок компенсационного канала;
15 - многоотводная линия задержки;
161 - 16К - элементарная адаптивная ячейка;
17 - сумматор на К входов;
18 - блок умножения на параметр сходимости алгоритма;
19 - сумматор на М-1 входов;
20 - сумматор сигналов опорного и компенсационных каналов;
21 - блок опорного канала;
22 - линия задержки на (К/2-1) тактов частоты дискретизации.
Блок-схема работает следующим образом: блок компенсационного канала 141 (142, …, 14М-1) построен на многоотводной линии задержки 15, сигналы с ее выходов поступают в элементарные адаптивные ячейки 161 (162, …, 16К), в которых производится адаптивная подстройка весовых коэффициентов и умножение на них выборок сигнала с соответствующего выхода многоотводной линии задержки. Сигналы, прошедшие весовую обработку в элементарных адаптивных ячейках 161 (162, …, 16К), суммируются в блоке 17 по всем отводам многоотводной линии задержки 15, после чего сумма умножается на параметр сходимости алгоритма в блоке 18. В блоке 19 суммируются сигналы с выходов всех блоков компенсационных каналов 141 (142, …, 14M-1), а затем эта сумма в блоке 20 вычитается из сигнала блока опорного канала 21, включающего в себя линию задержки на (К/2-1) тактов частоты дискретизации 22, предназначенную для выравнивания задержек сигналов в блоке опорного канала и блоке компенсационного канала 141 (142, …, 14М-1). Выходной сигнал блока 20 как сигнал ошибки заводится на входы элементарных адаптивных ячеек 161 (162, …, 16К), он же является выходным сигналом блока компенсации помех 131 (132, …, 13N).
На фиг. 6 изображена блок-схема элементарной адаптивной ячейки 161 (162, …, 16К).
Перечень блоков на фиг. 6:
23 - блок выделения знакового разряда;
24 - умножитель сигнала ошибки на знаковый разряд выборок сигнала с выхода многоотводной линии задержки;
25 - сумматор значений весового коэффициента на текущей и предыдущей итерациях;
26 - линия задержки элементарной адаптивной ячейки на 1 такт частоты дискретизации;
27 - умножитель входных выборок на весовой коэффициент.
В элементарной адаптивной ячейке 161 (162, …, 16К) реализуется алгоритм подстройки весового коэффициента по методу наименьших квадратов, который описывается выражением (1)

где w(m, k)i - весовой коэффициент в k-ой элементарной адаптивной ячейке 15k m-ого блока компенсационного канала 14m в момент времени i;
w(m,k)i-1 - значение весового коэффициента k-ой элементарной адаптивной ячейки 16k m-ого блока компенсационного канала 14m на предыдущей итерации (i-1);
х(m,k); - отсчет сигнала на выходе k-ого отвода многоотводной линии задержки 15 m-ого блока компенсационного канала 14m в момент времени i;
еi - сигнал ошибки в момент времени i, μ - параметр сходимости алгоритма адаптации, sign() - операция взятия знака.
Сигнал ошибки в момент времени i определяется выражением (2)

где di - сигнал на выходе блока опорного канала 21 в момент времени i.
Сигналы с выходов блоков компенсации помех 131 (132, …, 13N) поступают на входы квантователей 71 (72, …, 7N) (фиг. 1). Квантователь 71 (72, …, 7N) выполняет квантование многоразрядных сигналов с выходов блока пространственно-временной обработки сигналов 6 на 3 или 4 уровня с адаптивной подстройкой порогов квантования и является известным для специалиста устройством [6]. Выходные сигналы квантователей подаются на входы блока навигационного процессора 8, представляющего собой специализированное устройство обработки навигационных сигналов, например, может быть использована микросхема интегральная 1902 ВЦ1Я Навигационный процессор сигналов ГНСС ТДЦК.431262.003 разработки АО «КБ НАВИС» или аналоги других производителей.
Предлагаемые способ и реализующее его устройство обеспечивают пространственно-временную компенсацию помех, а также формирование лучей (максимумов) диаграммы направленности антенной решетки в направлении навигационных космических аппаратов по поступающим от навигационного процессора данным об их угловых положениях и при наличии информации об ориентации решетки.
Изобретение может быть реализовано в виде отдельного устройства и использовано, в частности, в такой области радионавигации, как навигационная аппаратура потребителей ГНСС, работоспособность которой требуется обеспечить при воздействии помех всех видов.
Изобретение также может быть использовано для повышения помехозащищенности систем цифровой связи и приемников цифрового телевидения.
Источники информации:
1. Уидроу Б., Стирнз С.Адаптивная обработка сигналов / Пер. с англ. - М.: Радио и связь, 1989. - 440 С.
2. Грибов П.С., Грибова М.А., Шатилов А.Ю. Особенность использования пленарных антенных решеток с центральной симметрией в схеме компенсатора помех // Вестник МЭИ. 2018. №2. С. 123-128.
3. Бакитько Р.В., Болденков Е.Н., Булавский Н.Т. и др. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. Изд. 4-е, перераб. и доп. - М.: Радиотехника, 2010. - 800 С.
4. Быстраков С.Г., Головин П.М., Ефименко B.C., Пастухов А.В., Харисов В.Н. Экспериментальное исследование цифрового антенного компенсатора помех для приемника СРНС // Радиотехника. 2008. №7. С.51-55.
5. Шатилов А.Ю., Грибов П.С. Метод калибровки частотных характеристик приемных каналов навигационной аппаратуры потребителей спутниковых навигационных систем // Научно-технический сборник Оборонная техника. 2017. №7-8. С. 118-122.
6. Christopher J. Hegarty, The MITRE Corporation, Analytical Model for GNSS Receiver Implementation Losses* https://www.mitre.org/sites/default/files/pdf/09 3995.pdf
Группа изобретений относится к области радиотехники и, в частности, радионавигации с использованием сигналов глобальных навигационных спутниковых систем (ГНСС). Техническим результатом группы изобретений является повышение эффективности подавления помех за счет формирования максимума или луча диаграммы направленности (ДН) или фокусировки в направлении прихода полезного сигнала от навигационного космического аппарата (НКА) при наличии информации об ориентации антенной решетки (АР), причем процедуры фокусировки и компенсации помех разделены. В способе пространственно-временной режекции помех в аппаратуре потребителей глобальных навигационных спутниковых систем в помеховой обстановке перед пространственно-временной компенсацией помех по методу наименьших квадратов выполняются операции расчета и усреднения корреляционной матрицы (размерностью М×М) аддитивной смеси полезных сигналов, помех и собственных шумов радиочастотных приемных трактов, производится ее разложение по системе собственных векторов, оцениваются количество действующих помех J, вычисляются N векторов весовых коэффициентов для формирования N лучей диаграммы направленности антенной решетки как проекции фокусирующих векторов, рассчитанных на основе данных об угловых положениях навигационных космических аппаратов, полученных из эфемерид, и ориентации антенной решетки, на шумовое подпространство, образуемое собственными векторами корреляционной матрицы, соответствующими ее M-J наименьшим собственным значениям, размерность которого определяется количеством действующих помех, и умножаются сигнальные выборки на рассчитанные N лучеобразующих векторов, подавая результат умножения на опорные каналы независимых блоков компенсации помех, и собственные векторы, соответствующие М-1 наибольшим собственным значениям корреляционной матрицы, подавая результат умножения на компенсационные каналы блоков компенсации помех. В устройство пространственно-временной режекции помех в аппаратуре потребителей глобальных навигационных спутниковых систем перед блоком пространственно-временной обработки сигналов введен блок векторно-матричного умножения. 2 н.п. ф-лы, 6 ил.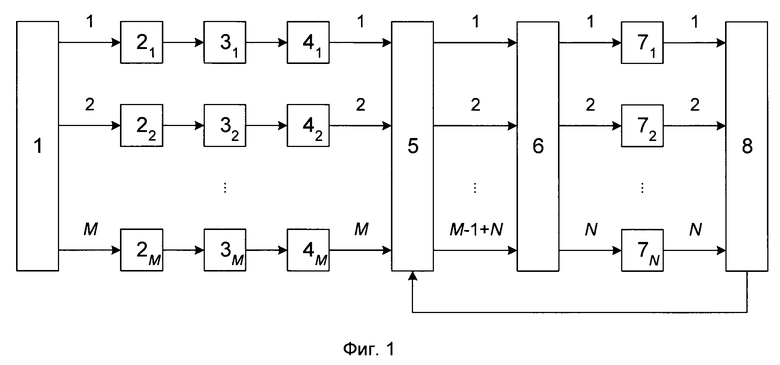
1. Способ пространственно-временной режекции помех в аппаратуре потребителей глобальных навигационных спутниковых систем, включающий операции М-канального приема, усиления, фильтрации, преобразования частоты, многоразрядного аналого-цифрового преобразования, цифровой фильтрации, квадратурного преобразования оцифрованных сигнальных выборок, пространственно-временной компенсации помех по методу наименьших квадратов, квантования, обработки в навигационном процессоре, отличающийся тем, что перед пространственно-временной компенсацией помех по методу наименьших квадратов выполняют операции расчета и усреднения корреляционной матрицы (размерностью М×М) аддитивной смеси полезных сигналов, помех и собственных шумов радиочастотных приемных трактов, производят ее разложение по системе собственных векторов, оценивают количество действующих помех J, вычисляют N векторов весовых коэффициентов для формирования N лучей диаграммы направленности антенной решетки как проекции фокусирующих векторов, рассчитанных на основе данных об угловых положениях навигационных космических аппаратов, полученных из эфемерид, и ориентации антенной решетки, на шумовое подпространство, образуемое собственными векторами корреляционной матрицы, соответствующими ее M-J наименьшим собственным значениям, размерность которого определяется количеством действующих помех, и умножают сигнальные выборки на рассчитанные N лучеобразующих векторов, подавая результат умножения на опорные каналы независимых блоков компенсации помех, и собственные векторы, соответствующие М-1 наибольшим собственным значениям корреляционной матрицы, подавая результат умножения на компенсационные каналы блоков компенсации помех, причем в алгоритм компенсации введено упрощение, заключающееся в том, что при адаптивной подстройке весовых коэффициентов используется только знаковый разряд отсчетов сигналов с выходов многоотводных линий задержки компенсационных каналов блоков компенсации помех.
2. Устройство пространственно-временной режекции помех в аппаратуре потребителей глобальных навигационных спутниковых систем, включающее последовательно соединенные М-элементную антенную решетку, радиочастотные приемные тракты, многоразрядные аналого-цифровые преобразователи, цифровые тракты обработки сигналов, блок пространственно-временной обработки сигналов, квантователи, блок навигационного процессора, отличающееся тем, что перед блоком пространственно-временной обработки сигналов в него введен блок векторно-матричного умножения, состоящий из последовательно соединенных блока вычисления корреляционной матрицы, блока усреднения корреляционной матрицы, блока разложения корреляционной матрицы по системе собственных векторов и подготовки векторов весовых коэффициентов, а также векторного умножителя, и имеющий М+1 входов, М из которых соединены с выходами цифровых трактов обработки сигналов, а информационный вход, предназначенный для ввода азимутальных углов и углов места, характеризующих направления на навигационные космические аппараты относительно антенной решетки, соединен с выходом блока навигационного процессора, и М-1+N выходов, соединенных с входами блока пространственно-временной обработки сигналов, включающего в себя N блоков компенсации помех, каждый из которых состоит из блока опорного канала, в который поступает сигнал одного из N лучей диаграммы направленности антенной решетки, и М-1 блоков компенсационного канала, каждый из которых построен на многоотводной линии задержки, сигнал с выходов которой подается на входы элементарных адаптивных ячеек, выполненных с возможностью подстройки весовых коэффициентов по методу наименьших квадратов, причем при расчете весового коэффициента в элементарных адаптивных ячейках используется только знаковый разряд отсчетов сигналов с выходов многоотводных линий задержки, а N выходов блока пространственно-временной обработки сигналов служат входами квантователей, выходы которых соединены с входами блока навигационного процессора соответственно, выход которого соединен с информационным входом блока векторно-матричного умножения.
| CN 113253305 A, 13.08.2021 | |||
| EP 3022585 A1, 25.05.2016 | |||
| RU 2774403 C1, 21.06.2022 | |||
| Способ и устройство определения угловой ориентации летательных аппаратов | 2020 |
|
RU2740606C1 |
| 0 |
|
SU160468A1 | |
| CN 105510940 A, 20.04.2016 | |||
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ НАВИГАЦИОННОЙ СИСТЕМЫ С ПОНИЖЕННОЙ ВОСПРИИМЧИВОСТЬЮ К НЕПРЕДНАМЕРЕННЫМ И ПРЕДНАМЕРЕННЫМ ПОМЕХАМ | 2006 |
|
RU2419804C2 |
| ПИСАРЕВ С.Б., НЕМОВ А.В., ИВАНОВ А.М., ФУКСОВ М.М | |||
| Возможности пространственной режекции помех при приеме сигналов глобальных навигационных спутниковых систем | |||
