Данный способ относится к области геодезических измерений, получения, обработки и отображения геопространственной информации, компьютерным средствам преобразования, визуализации и интерпретации цифровых трёхмерных моделей геоинформационных систем в трехмерном пространстве с применением технологии лазерного сканирования и может быть использован для создания цифровых трёхмерных моделей объектов и территорий с целью геодезического мониторинга земной поверхности в сейсмоопасных районах, где возведены особо сложные технологические инженерные объекты.
Известен способ получения, обработки, отображения и интерпретации геопространственных данных, который заключается в создании цифровых трёхмерных моделей объектов и рельефа земной поверхности по данным геодезических съёмок методом лазерного сканирования [В.А. Середович, Наземное лазерное сканирование, Новосибирск, СГГА, 2009 г.], взятый в качестве прототипа.
Сущность данного способа состоит в том, что на контролируемой территории проводят геодезическую съемку ситуации и рельефа с помощью лазерного сканирования. По данным геодезической съемки выполняют геодезические измерения контролируемой территории с привязкой к системе координат ПВО, получают результаты геодезических измерений в определенный период времени, которые передают в ПВЭМ, с помощью компьютерной программы выполняют обработку материалов и получают облако точек геодезических измерений, которое используют для создания цифровых метрических трёхмерной моделей земной поверхности контролируемой территории.
Недостатком этого способа является низкая точность определения смещений земной поверхности в контрольных точках опорных пунктов ПВО, а так же трудоемкость процесса повторения измерения для уточнения планового или высотного положения объектов местности вследствие необходимости повторного выполнения полевых работ. Как следствие сказанного снижается точность и достоверность определения планово – высотных смещений земной поверхности контролируемой территории в определенный период времени, что, в конечном счёте, ведёт к снижению достоверности и эффективности работ при геодезическом мониторинге деформационного состояния земной поверхности контролируемой территории.
Решаемая техническая проблема заключается в повышении эффективности способа геодезического мониторинга деформационного состояния земной поверхности контролируемой территории с применением технологии лазерного сканирования за счёт обеспечения повышения точности определения координат X,Y,Z, проектных контрольных точек опорных пунктов ПВО и передачи в режиме реального времени геопространственных данных с помощью системы сдвигомеров, а так же оперативного доступа к актуальной информации, используя технологии лазерного сканирования в трёхмерном пространстве совместно с автоматизированными цифровыми технологиями передачи информации в режиме реального времени.
Проблема решается тем, что в представленном способе геодезического мониторинга деформационного состояния земной поверхности в сейсмоопасных районах с применением технологии лазерного сканирования, при котором на контролируемой территории создают планово-высотное обоснование (ПВО), выполняют геодезические измерения с применением технологии лазерного сканирования контролируемой территории с привязкой к системе координат ПВО, получают результаты геодезических измерений в определенный период времени, которые передают в ПЭВМ с общим и прикладным программным обеспечением обработки, отображения и преобразования информации, с помощью компьютерной программы выполняют обработку материалов и получают облако точек геодезических измерений, которое используют для создания цифровых метрических трёхмерной моделей земной поверхности контролируемой территории, согласно техническому решению на контролируемой территории, где возведены особо сложные технологические инженерные объекты, создают геодинамический полигон, на котором выполняют упомянутое ПВО в местной системе координат с применением технологии высокоточного спутникового позиционирования, где в качестве опорных пунктов ПВО служат базовые станции GPS, размещённые по определённой проектной схеме с учетом выявленных зон разломов верхней части земной коры. Кроме того опорные пункты ПВО используют в качестве проектных контрольных точек, которые оснащают геодезической контрольно – измерительной аппаратурой (КИА) в виде системы прямых и обратных сдвигомеров, с помощью которой выполняют натурные наблюдения, с возможностью измерения смещений земной поверхности в зонах разломов верхней части земной коры относительно проектных контрольных точек, закрепленных на отметке залегания твёрдых горных пород и передачи их проекции на земную поверхность. При этом в упомянутую геодезическую КИА дополнительно интегрируют цифровые датчики, с помощью которых получают геопространственные данные за смещениями земной поверхности в опорных пунктах ПВО, принятых в качестве проектных контрольных точек, по координатам X,Y,Z, с возможностью их передачи в цифровой форме в режиме реального времени в упомянутую ПЭВМ с общим и прикладным программным обеспечением обработки, отображения и преобразования информации, в котором создают интерфейсную подсистему обработки и постоянного обновления геопространственных данных. Натурные наблюдения нулевого цикла выполняют совместно с использованием технологии воздушного или мобильного лазерного сканирования земной поверхности контролируемой территории по упомянутым опорным пунктам ПВО геодинамического полигона. В результате геодезических измерений с помощью упомянутого лазерного сканирования определяют пространственные координаты по осям X,Y,Z облака точек отражения лазерного луча от земной поверхности контролируемой территории и опорных пунктов ПВО, которые идентифицируются на сканах, где пространственные координаты по осям X,Y соответствуют относительным плановым отметкам плановой сети ПВО, а пространственные координаты по оси Z соответствуют относительным высотным отметкам высотной сети ПВО, получают скан. С помощью компьютерной программы регистрируют сканы, получают цифровую метрическую точечную трехмерную модель земной поверхности контролируемой территории, где каждая точка этой модели имеет пространственные координаты по осям X,Y,Z отражённого лазерного луча от земной поверхности, с интегрированными в неё пространственными координатами по осям X,Y,Z проектных контрольных точек опорных пунктов ПВО, передают её в упомянутую интерфейсную подсистему обработки и постоянного обновления геопространственных данных. Затем формируют виртуальные объекты «горизонтальная плоскость» и «вертикальная плоскость» путем сечения цифровой метрической точечной трёхмерной модели горизонтальными и вертикальными плоскостями по контрольным точкам опорных пунктов ПВО, автоматически апроксимируя векторные геометрические примитивы «горизонтальная плоскость» и «вертикальная плоскость» в данные лазерного сканирования и получают цифровую метрическую векторную трёхмерную модель земной поверхности контролируемой территории в местах сечения по проектным контрольным точкам опорных пунктов ПВО с интегрированными в неё пространственными координатами по осям X,Y,Z самих опорных пунктов ПВО. В этой же интерфейсной подсистеме обработки и постоянного обновления геопространственных данных с помощью компьютерной программы трансформируют пространственные данные в проектных контрольных точках по координатам X,Y,Z земной поверхности контролируемой территории в цифровой форме в режиме реального времени, полученных с помощью цифровых датчиков, интегрированных в геодезическую КИА, в данные цифровой метрической векторной трехмерной модели и получают исходную базовую цифровую метрическую трехмерную модель земной поверхности контролируемой территории в режиме реального времени по результатам нулевого цикла геодезических измерений по упомянутым опорным пунктам ПВО геодинамического полигона. В этой же интерфейсной подсистеме обработки и постоянного обновления геопространственных данных по результатам натурных измерений в каждом последующем цикле автоматически вносят поправки в координаты проектных контрольных точек опорных пунктов ПВО в соответствующие координаты исходной базовой цифровой метрической трехмерной модели земной поверхности контролируемой территории и создают интегральную фактическую цифровую метрическую трехмерную модель земной поверхности контролируемой территории с возможностью визуализации и оценки деформационной ситуации на контролируемом участке текущей или смоделированной с использованием предельно-допустимых критических значений смещений, как для земной поверхности, так и для особо сложных технологических инженерных объектов путём сравнения исходной базовой цифровой метрической трехмерной модели земной поверхности с упомянутой интегральной фактической цифровой метрической трехмерной моделью земной поверхности каждого последующего цикла, полученную путем введения поправок в координаты ПВО в соответствии с геодезическими данными натурных наблюдений, с помощью системы прямых и обратных сдвигомеров на контролируемом участке в системе координат ПВО в режиме реального времени и воссоздают фактическую цифровую метрическую трёхмерную модель деформационной зоны земной поверхности контролируемой территории в режиме реального времени для конкретного цикла. Затем создают и используют административную подсистему в виде сервера геопространственных данных с возможностью анализа, интерпретации и хранения полученных геопространственных данных и передают в неё из интерфейсной подсистемы обработки и постоянного обновления геопространственных данных указанную исходную базовую цифровую метрическую трехмерную модель земной поверхности контролируемой территории, интегральную фактическую цифровую метрическую трехмерную модель земной поверхности контролируемой территории и фактическую цифровую метрическую трёхмерную модель деформационной зоны, с возможностью хранения, анализа и интерпретации полученных данных. Далее создают и используют интерфейсную подсистему визуализации геопространственных данных путем предоставления по защищённому каналу передачи данных сервиса пользователям с возможностью запроса, визуализации и экспорта запрашиваемых геопространственных данных. При этом геопространственные данные используют совместно с данными в проектных контрольных точках по координатам X,Y,Z земной поверхности на контролируемой территории в цифровой форме в режиме реального времени, полученных с помощью цифровых датчиков, интегрированных в геодезическую КИА. Так же создают и используют интерфейсную подсистему геодезического мониторинга деформационного состояния земной поверхности контролируемой территории, в которой создают систему расчета последствий при чрезвычайных сейсмических ситуациях в режиме реального времени путём вычисления в автоматическом режиме расхождения между фактическими значениями интегральной фактической цифровой метрической трехмерной модели каждого последующего цикла геодезических измерений и соответствующими значениями исходной базовой цифровой метрической трёхмерной модели земной поверхности контролируемой территории в системе координат ПВО, с возможностью визуализации и оценки текущей ситуации на контролируемом участке. Тем самым осуществляют упомянутый геодезический мониторинг деформационного состояния земной поверхности в режиме реального времени в сейсмоопасных районах, где возведены особо сложные технологические инженерные объекты.
Указанная совокупность признаков позволяет повысить эффективность способа геодезического мониторинга деформационного состояния земной поверхности в сейсмоопасных районах, где возведены особо сложные технологические инженерные объекты, с применением технологии лазерного сканирования за счёт обеспечения в режиме реального времени оперативного доступа к актуальной информации и повышения её точности, а значит достоверности, используя технологии лазерного сканирования в трёхмерном пространстве совместно с цифровой технологией передачи информации в режиме реального времени.
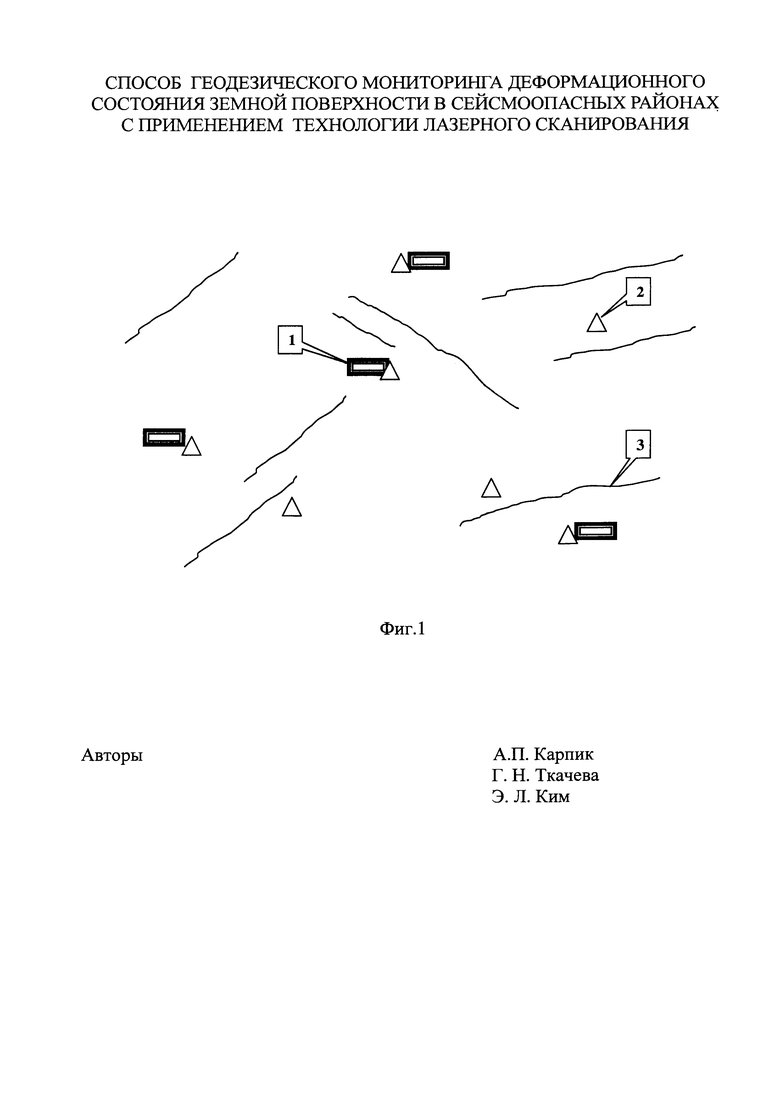
Сущность технического решения поясняется примером реализации способа геодезического мониторинга деформационного состояния земной поверхности в сейсмоопасных районах, где возведены особо сложные технологические инженерные объекты, с применением технологии лазерного сканирования и чертежами фиг. 1, 2, где на фиг. 1 представлена условная схема создания геодинамического полигона на контролируемой территории; на фиг. 2 - структурная схема взаимодействия блоков сервиса предоставления геопространственной информации с применением технологии лазерного сканирования в трёхмерном пространстве совместно с цифровой технологией передачи информации в режиме реального времени.
Предлагаемый способ осуществляют следующим образом. До начала геодезических измерений на контролируемой территории, где возведены особо сложные технологические инженерные объекты 1, создают геодинамический полигон (см. фиг. 1), на котором выполняют ПВО в местной системе координат с применением технологии высокоточного спутникового позиционирования, где в качестве опорных пунктов ПВО 2 (далее – опорные пункты 2) служат базовые станции GPS, размещённые по определённой проектной схеме с учетом выявленных зон разломов верхней части земной коры 3 (далее – зоны разломов 3). Опорные пункты 2 используют в качестве проектных контрольных точек, которые оснащают геодезической контрольно – измерительной аппаратурой (КИА) в виде системы прямых и обратных сдвигомеров ( на чертеже не показана), с помощью которой выполняют натурные наблюдения, с возможностью измерения смещений земной поверхности в зонах разломов 3 верхней части земной коры относительно проектных контрольных точек, закрепленных на отметке залегания твёрдых горных пород и передачи их проекции на земную поверхность. При этом в упомянутую геодезическую КИА дополнительно интегрируют цифровые датчики, с помощью которых получают геопространственные данные за смещениями земной поверхности в опорных пунктах 2, принятых в качестве проектных контрольных точек, по координатам X,Y,Z, с возможностью их передачи в цифровой форме в режиме реального времени в ПЭВМ с общим и прикладным программным обеспечением обработки, отображения и преобразования информации, в котором создают интерфейсную подсистему обработки и постоянного обновления геопространственных данных 4 (далее - интерфейсная подсистема 4) (см. фиг.2). Натурные наблюдения нулевого цикла выполняют совместно с использованием технологии воздушного или мобильного лазерного сканирования земной поверхности контролируемой территории по опорным пунктам 2 геодинамического полигона (см. фиг. 1). В результате геодезических измерений с помощью лазерного сканирования определяют пространственные координаты по осям X,Y,Z облака точек отражения лазерного луча от земной поверхности контролируемой территории и опорных пунктов 2 (см. фиг. 1), которые идентифицируются на сканах, где пространственные координаты по осям X,Y соответствуют относительным плановым отметкам плановой сети ПВО, а пространственные координаты по оси Z соответствуют относительным высотным отметкам высотной сети ПВО. Получают сканы, помощью компьютерной программы регистрируют их и получают цифровую метрическую точечную трехмерную модель земной поверхности контролируемой территории, где каждая точка этой модели имеет пространственные координаты по осям X,Y,Z отражённого лазерного луча от земной поверхности, с интегрированными в неё пространственными координатами по осям X,Y,Z проектных контрольных точек опорных пунктов 2, передают её в интерфейсную подсистему 1 (см. фиг. 2). Затем формируют виртуальные объекты «горизонтальная плоскость» и «вертикальная плоскость» путем сечения цифровой метрической точечной трёхмерной модели горизонтальными и вертикальными плоскостями по контрольным точкам опорных пунктов ПВО, автоматически апроксимируя векторные геометрические примитивы «горизонтальная плоскость» и «вертикальная плоскость» в данные лазерного сканирования. Получают цифровую метрическую векторную трёхмерную модель земной поверхности контролируемой территории в местах сечения по проектным контрольным точкам опорных пунктов 2 (см. фиг. 1) с интегрированными в неё пространственными координатами по осям X,Y,Z самих опорных пунктов 2. В этой же интерфейсной подсистеме 1 (см. фиг. 2) с помощью компьютерной программы трансформируют пространственные данные в проектных контрольных точках по координатам X,Y,Z земной поверхности контролируемой территории в цифровой форме в режиме реального времени, полученных с помощью цифровых датчиков, интегрированных в геодезическую КИА, в данные цифровой метрической векторной трехмерной модели и получают исходную базовую цифровую метрическую трехмерную модель земной поверхности контролируемой территории в режиме реального времени по результатам нулевого цикла геодезических измерений по упомянутым опорным пунктам 2 геодинамического полигона. В этой же интерфейсной подсистеме 1 (см. фиг. 2) по результатам натурных измерений в каждом последующем цикле автоматически вносят поправки в координаты проектных контрольных точек опорных пунктов ПВО в соответствующие координаты исходной базовой цифровой метрической трехмерной модели земной поверхности контролируемой территории и создают интегральную фактическую цифровую метрическую трехмерную модель земной поверхности контролируемой территории с возможностью визуализации и оценки деформационной ситуации на контролируемом участке текущей или смоделированной с использованием предельно-допустимых критических значений смещений, как для земной поверхности, так и для особо сложных технологических инженерных объектов 1 путём сравнения исходной базовой цифровой метрической трехмерной модели земной поверхности с упомянутой интегральной фактической цифровой метрической трехмерной моделью земной поверхности каждого последующего цикла, полученной путем введения поправок в координаты ПВО в соответствии с геодезическими данными натурных наблюдений, с помощью системы прямых и обратных сдвигомеров на контролируемом участке в системе координат ПВО в режиме реального времени и воссоздают фактическую цифровую метрическую трёхмерную модель деформационной зоны земной поверхности контролируемой территории в режиме реального времени для конкретного цикла. Затем дополнительно создают и используют административную подсистему в виде сервера геопространственных данных с возможностью анализа, интерпретации и хранения полученных геопространственных данных 5 (далее - административная подсистема 5) (см. фиг. 2). Далее из интерфейсной подсистемы 4 передают в административную подсистему 5 указанную исходную базовую цифровую метрическую трехмерную модель земной поверхности контролируемой территории, интегральную фактическую цифровую метрическую трехмерную модель земной поверхности контролируемой территории и фактическую цифровую метрическую трёхмерную модель деформационной зоны, с возможностью хранения, анализа и интерпретации полученных данных. Далее создают и используют интерфейсную подсистему визуализации геопространственных данных 6 (далее - интерфейсная подсистема 6) (см. фиг. 2), путем предоставления по защищённому каналу передачи данных сервиса пользователям с возможностью запроса, визуализации и экспорта запрашиваемых геопространственных данных. Геопространственные данные используют совместно с данными в проектных контрольных точках по координатам X,Y,Z земной поверхности на контролируемой территории в цифровой форме в режиме реального времени, полученных с помощью цифровых датчиков, интегрированных в геодезическую КИА. Так же создают и используют интерфейсную подсистему геодезического мониторинга деформационного состояния земной поверхности контролируемой территории 7 (далее - интерфейсная подсистема 7) (см. фиг. 2), в которой создают систему расчета последствий при чрезвычайных сейсмических ситуациях в режиме реального времени путём вычисления в автоматическом режиме расхождения между фактическими значениями интегральной фактической цифровой метрической трехмерной модели каждого последующего цикла геодезических измерений и соответствующими значениями исходной базовой цифровой метрической трёхмерной модели земной поверхности контролируемой территории в системе координат ПВО, с возможностью визуализации и оценки текущей ситуации на контролируемом участке. Тем самым осуществляют упомянутый геодезический мониторинг деформационного состояния земной поверхности в режиме реального времени в сейсмоопасных районах, где возведены особо сложные технологические инженерные объекты 1 (см. фиг. 1). Далее создают система поиска нужного фрагмента контролируемой территории в системе координат ПВО и доступа к нему, выделяя вышеуказанный фрагмент на модели по координатам путем предоставления по защищённому каналу передачи данных сервиса пользователям 8 с возможностью запроса, визуализации и экспорта запрашиваемых геопространственных данных через интерфейсную подсистему 6. Затем используют интерфейсную подсистему 7 в которой создают систему расчета последствий при деформации земной поверхности с возможностью запроса, визуализации и формирования отчетов в виде сводных таблиц, ведомостей, графиков и ситуационных карт для планирования мероприятий либо ликвидации последствий чрезвычайных ситуаций на контролируемом участке путём вычисления в автоматическом режиме расхождения между фактическими значениями интегральной фактической цифровой метрической трехмерной модели и соответствующими значениями исходной базовой цифровой метрической трёхмерной модели земной поверхности контролируемой территории в системе координат ПВО, с возможностью визуализации текущей ситуации на контролируемом участке. Пользователь 8, имеющий аккредитацию на сервисе, получает нужный фрагмент в виде цифровой метрической точечной модели заданной территории на свой рабочий компьютер (см. фиг. 2), обрабатывает этот фрагмент средствами, размещёнными в административной подсистеме 5 или в собственных программах и получает результат для дальнейшего использования в виде цифровой метрической и визуальной информации. Таким образом, пользователям 8 предоставляется возможность получать оперативный доступ к актуальной информации на конкретный участок в виде цифровых метрических трехмерных моделей земной поверхности на конкретную территорию. При этом пользователь 8 в интерактивном режиме может выбирать на модели конкретное место и получать для работы несколько вариантов информации. Это может быть как цифровая трёхмерная точечная метрическая модель земной поверхности контролируемой территории, так и интегрированные цифровые трёхмерные модели территории. Данная информация может высылаться на электронную почту для работы в любом программном обеспечении. После интерпретации и анализа полученных данных делают заключение о деформационном состоянии земной поверхности контролируемой территории на геодинамическом полигоне в определенный период времени. Тем самым осуществляют геодезический мониторинг деформационного состояния земной поверхности контролируемой территории в определенный период времени в сейсмоопасных районах, где возведены особо сложные технологические инженерные объекты.
Предлагаемый инновационный способ геодезического мониторинга деформационного состояния земной поверхности в сейсмоопасных районах, особенно в труднодоступных местах, где возведены сложные технологические инженерные объекты, основанный на бесконтактных методах геодезического контроля, позволяет значительно повысить эффективность работ, в том числе экономическую эффективность работ, информативность, достоверность и точность данных о смещениях земной поверхности в зонах разломов верхней части земной коры относительно проектных контрольных точек, закрепленных на отметке залегания твёрдых горных пород и, как следствие, принять превентивные меры и обеспечить безопасную эксплуатацию особо сложных технологических инженерных объектов, функционирующих в сейсмоопасных районах.

Изобретение относится к области геодезического мониторинга и может быть использовано для геодезического мониторинга деформационного состояния земной поверхности в сейсмоопасных районах, где возведены сложные технологические инженерные объекты. Технический результат: повышение эффективности геодезического мониторинга деформационного состояния земной поверхности за счет повышения точности определения координат проектных контрольных точек и передачи в режиме реального времени геопространственных данных, а также обеспечения оперативного доступа к актуальной информации. 2 ил.
Способ геодезического мониторинга деформационного состояния земной поверхности в сейсмоопасных районах с применением технологии лазерного сканирования, при котором на контролируемой территории создают планово-высотное обоснование (ПВО), выполняют геодезические измерения с применением технологии лазерного сканирования контролируемой территории с привязкой к системе координат ПВО, получают результаты геодезических измерений в определенный период времени, которые передают в ПЭВМ с общим и прикладным программным обеспечением обработки, отображения и преобразования информации, с помощью компьютерной программы выполняют обработку материалов и получают облако точек геодезических измерений, которое используют для создания цифровых метрических трехмерных моделей земной поверхности контролируемой территории, отличающийся тем, что на контролируемой территории, где возведены особо сложные технологические инженерные объекты, создают геодинамический полигон, на котором выполняют упомянутое ПВО в местной системе координат с применением технологии высокоточного спутникового позиционирования, где в качестве опорных пунктов ПВО служат базовые станции GPS, размещенные по определенной проектной схеме с учетом выявленных зон разломов верхней части земной коры, кроме того, опорные пункты ПВО используют в качестве проектных контрольных точек, которые оснащают геодезической контрольно-измерительной аппаратурой (КИА) в виде системы прямых и обратных сдвигомеров, с помощью которой выполняют натурные наблюдения с возможностью измерения смещений земной поверхности в зонах разломов верхней части земной коры относительно проектных контрольных точек, закрепленных на отметке залегания твердых горных пород, и передачи их проекции на земную поверхность, при этом в упомянутую геодезическую КИА дополнительно интегрируют цифровые датчики, с помощью которых получают геопространственные данные о смещениях земной поверхности в опорных пунктах ПВО, принятых в качестве проектных контрольных точек, по координатам X, Y, Z с возможностью их передачи в цифровой форме в режиме реального времени в упомянутую ПЭВМ с общим и прикладным программным обеспечением обработки, отображения и преобразования информации, в котором создают интерфейсную подсистему обработки и постоянного обновления геопространственных данных, кроме того, натурные наблюдения нулевого цикла выполняют совместно с использованием технологии воздушного или мобильного лазерного сканирования земной поверхности контролируемой территории по упомянутым опорным пунктам ПВО геодинамического полигона, в результате геодезических измерений с помощью упомянутого лазерного сканирования определяют пространственные координаты по осям X, Y, Z облака точек отражения лазерного луча от земной поверхности контролируемой территории и опорных пунктов ПВО, которые идентифицируются на сканах, где пространственные координаты по осям X, Y соответствуют относительным плановым отметкам плановой сети ПВО, а пространственные координаты по оси Z соответствуют относительным высотным отметкам высотной сети ПВО, получают скан, с помощью компьютерной программы регистрируют сканы, получают цифровую метрическую точечную трехмерную модель земной поверхности контролируемой территории, где каждая точка имеет пространственные координаты по осям X, Y, Z отраженного лазерного луча от земной поверхности с интегрированными в нее пространственными координатами по осям X, Y, Z проектных контрольных точек опорных пунктов ПВО, передают ее в упомянутую интерфейсную подсистему обработки и постоянного обновления геопространственных данных, затем формируют виртуальные объекты “горизонтальная плоскость” и “вертикальная плоскость” путем сечения цифровой метрической точечной трехмерной модели горизонтальными и вертикальными плоскостями по контрольным точкам опорных пунктов ПВО, автоматически аппроксимируя векторные геометрические примитивы “горизонтальная плоскость” и “вертикальная плоскость” в данные лазерного сканирования, и получают цифровую метрическую векторную трехмерную модель земной поверхности контролируемой территории в местах сечения по проектным контрольным точкам опорных пунктов ПВО с интегрированными в нее пространственными координатами по осям X, Y, Z самих опорных пунктов ПВО, в этой же интерфейсной подсистеме обработки и постоянного обновления геопространственных данных с помощью компьютерной программы трансформируют пространственные данные в проектных контрольных точках по координатам X, Y, Z земной поверхности контролируемой территории в цифровой форме в режиме реального времени, полученных с помощью цифровых датчиков, интегрированных в геодезическую КИА, в данные цифровой метрической векторной трехмерной модели и получают исходную базовую цифровую метрическую трехмерную модель земной поверхности контролируемой территории в режиме реального времени по результатам нулевого цикла геодезических измерений по упомянутым опорным пунктам ПВО геодинамического полигона, в этой же интерфейсной подсистеме обработки и постоянного обновления геопространственных данных по результатам натурных измерений в каждом последующем цикле автоматически вносят поправки в координаты проектных контрольных точек опорных пунктов ПВО в соответствующие координаты исходной базовой цифровой метрической трехмерной модели земной поверхности контролируемой территории и создают интегральную фактическую цифровую метрическую трехмерную модель земной поверхности контролируемой территории с возможностью визуализации и оценки деформационной ситуации на контролируемом участке текущей или смоделированной с использованием предельно-допустимых критических значений смещений как для земной поверхности, так и для особо сложных технологических инженерных объектов путем сравнения исходной базовой цифровой метрической трехмерной модели земной поверхности с упомянутой интегральной фактической цифровой метрической трехмерной моделью земной поверхности каждого последующего цикла, полученной путем введения поправок в координаты ПВО в соответствии с геодезическими данными натурных наблюдений с помощью системы сдвигомеров на контролируемом участке в системе координат ПВО в режиме реального времени, и воссоздают фактическую цифровую метрическую трехмерную модель деформационной зоны земной поверхности контролируемой территории в режиме реального времени для конкретного цикла, затем создают и используют административную подсистему в виде сервера геопространственных данных с возможностью анализа, интерпретации и хранения полученных геопространственных данных и передают в нее из интерфейсной подсистемы обработки и постоянного обновления геопространственных данных указанную исходную базовую цифровую метрическую трехмерную модель земной поверхности контролируемой территории, интегральную фактическую цифровую метрическую трехмерную модель земной поверхности контролируемой территории и фактическую цифровую метрическую трехмерную модель деформационной зоны с возможностью хранения, анализа и интерпретации полученных данных, далее создают и используют интерфейсную подсистему визуализации геопространственных данных путем предоставления по защищенному каналу передачи данных сервиса пользователям с возможностью запроса, визуализации и экспорта запрашиваемых геопространственных данных, при этом геопространственные данные используют совместно с данными в проектных контрольных точках по координатам X, Y, Z земной поверхности на контролируемой территории в цифровой форме в режиме реального времени, полученными с помощью цифровых датчиков, интегрированных в геодезическую КИА, также создают и используют интерфейсную подсистему геодезического мониторинга деформационного состояния земной поверхности контролируемой территории, в которой создают систему расчета последствий при чрезвычайных сейсмических ситуациях в режиме реального времени путем вычисления в автоматическом режиме расхождения между фактическими значениями интегральной фактической цифровой метрической трехмерной модели каждого последующего цикла геодезических измерений и соответствующими значениями исходной базовой цифровой метрической трехмерной модели земной поверхности контролируемой территории в системе координат ПВО с возможностью визуализации и оценки текущей ситуации на контролируемом участке, тем самым осуществляют упомянутый геодезический мониторинг деформационного состояния земной поверхности в режиме реального времени в сейсмоопасных районах, где возведены особо сложные технологические инженерные объекты.
| В.А.СЕРЕДОВИЧ | |||
| Наземное лазерное сканирование | |||
| - г | |||
| Новосибирск, СГГА, 2009 | |||
| СПОСОБ ПОЛУЧЕНИЯ, ОБРАБОТКИ И ОТОБРАЖЕНИЯ ГЕОПРОСТРАНСТВЕННЫХ ДАННЫХ В ФОРМАТЕ 3D С ПРИМЕНЕНИЕМ ТЕХНОЛОГИИ ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2015 |
|
RU2591173C1 |
| СПОСОБ ПОЛУЧЕНИЯ, ОБРАБОТКИ, ОТОБРАЖЕНИЯ И ИНТЕРПРЕТАЦИИ ГЕОПРОСТРАНСТВЕННЫХ ДАННЫХ ДЛЯ ГЕОДЕЗИЧЕСКОГО МОНИТОРИНГА ОПЕРАТИВНОЙ ОБСТАНОВКИ ПАВОДКОВОЙ СИТУАЦИИ С ПРИМЕНЕНИЕМ ТЕХНОЛОГИИ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ | 2016 |
|
RU2633642C9 |

