Данный способ относится к области геодезического контроля в дорожно-строительной отрасли. Известен способ определения геометрических параметров дорожного полотна и характеристик придорожной полосы с помощью нивелира и нивелирной рейки [ГОСТ Р 52577 - 2006 «Дороги автомобильные общего пользования. Методы определения параметров геометрических элементов автомобильных дорог», дата введения - 01.01.2007 г.], взятый в качестве прототипа.
Сущность данного способа состоит в том, что на контролируемом участке проводят измерения линейных параметров в продольном профиле автомобильной дороги с помощью рулетки измерительной металлической не ниже 3-го класса точности. Кроме того, для определения продольного уклона автомобильной дороги применяют нивелир, последовательно устанавливая нивелирную рейку в местах, обозначенных метками. По данным нивелирования вычисляют относительные отметки точек поверхности измеряемого слоя автомобильной дороги в местах разметки.
Недостатком этого способа является использование разных технических средств с различными точностными характеристиками, а так же невозможность повторения измерений, так как точки измерений не закрепляются планово-высотным обоснованием, поэтому невозможно произвести повторные измерения на контролируемом участке. Также недостатком этого способа является то, что данный способ предполагает контроль параметров геометрических элементов на небольших участках дороги без захвата придорожной полосы, а следовательно, в целом работы на всех участках выполняются с низкой производительностью труда. Кроме того, данный способ предполагает наличие человеческого фактора в процессе контроля, что ведет к снижению достоверности и точности измерения. Задачей предлагаемого технического решения является разработка способа определения геометрических параметров поверхности покрытия дорожного полотна и характеристик придорожной полосы с применением технологии лазерного сканирования.
Техническим результатом изобретения является определение достоверных и точных значений параметров геометрических элементов автомобильной дороги и характеристик придорожной полосы с применением технологий лазерного сканирования.
Поставленная задача достигается тем, что в способе определения параметров геометрических элементов автомобильной дороги и характеристик придорожной полосы, при котором определяют линейные геометрические параметры автомобильной дороги по поверхности измеряемого слоя, согласно техническому решению выполняют планово-высотное обоснование (ПВО) контролируемого участка автомобильной дороги и ее придорожной полосы с помощью наземной или мобильной сканерной геодезической съемки в прямом и обратном направлении, где в качестве опорных пунктов ПВО служат базовые станции GPS, размещенные по обочине автомобильной дороги через заданный интервал, а также твердые точки по сторонам обочины дорожного полотна в виде оснований столбов дорожных знаков и элементов обустройства автомобильной дороги. Выполняют наземное или мобильное лазерное сканирование контролируемого участка по опорным пунктам ПВО, в результате чего определяют пространственные координаты по осям X, Y, Z точек отражения лазерного луча от поверхности автомобильной дороги и придорожной полосы и опорные пункты ПВО, которые идентифицируются на сканах, где пространственные координаты по осям X,Y соответствуют относительным плановым отметкам плановой сети, а пространственные координаты по оси Z соответствуют относительным высотным отметкам высотной сети. Получают скан, передают результаты сканирования (сканы) в ПЭВМ и с помощью компьютерной программы регистрируют в ней сканы, получают фактическую цифровую точечную трехмерную (3D) модель поверхности автомобильной дороги и придорожной полосы, где каждая точка этой модели имеет пространственные координаты по осям X, Y, Z отраженного лазерного луча от поверхности измеряемого слоя и других элементов обустройства автомобильной дороги с интегрированными в нее пространственными координатами по осям X, Y, Z опорных пунктов ПВО. Затем выполняют маршрутное фотографирование контролируемого участка дорожного полотна и прилегающей территории на ширину до 200 метров от оси автодороги в прямом и обратном направлении на базе беспилотного летательного аппарата. Передают результаты фотографирования в ПЭВМ, с помощью компьютерной программы регистрируют в ней ортофотопланы и производят построение цифровой фотограмметрической модели поверхности дорожного полотна и прилегающих к нему участков. По опорным пунктам ПВО трансформируют ее пространственные данные в данные фактической цифровой векторной трехмерной (3D) модели и получают интегральную реалистическую цифровую векторную трехмерную (3D) модель контролируемого участка автомобильной дороги и придорожной полосы, в этой же программе моделируют эталонную трехмерную модель автомобильной дороги и придорожной полосы, используя проектные значения измеряемых параметров геометрических элементов автомобильной дороги. Совмещают ее по тем же опорным пунктам ПВО с полученной интегральной реалистической цифровой векторной трехмерной (3D) моделью автомобильной дороги и придорожной полосы. Далее формируют с заданной дискретностью продольные сечения, в автоматическом режиме распознают расхождения между фактическими значениями контролируемых параметров геометрических элементов интегральной реалистической цифровой векторной трехмерной (3D) модели и значениями эталонной трехмерной модели контролируемого участка автомобильной дороги, сравнивая полученные данные, определяют линейные геометрические параметры автомобильной дороги по поверхности измеряемого слоя, необходимые при строительстве или реконструкции автомобильных дорог. Также формируют информацию об объектах придорожной полосы за счет совместного анализа данных, полученных с помощью наземной или мобильной сканерной геодезической съемки и съемки на базе беспилотного летательного аппарата.
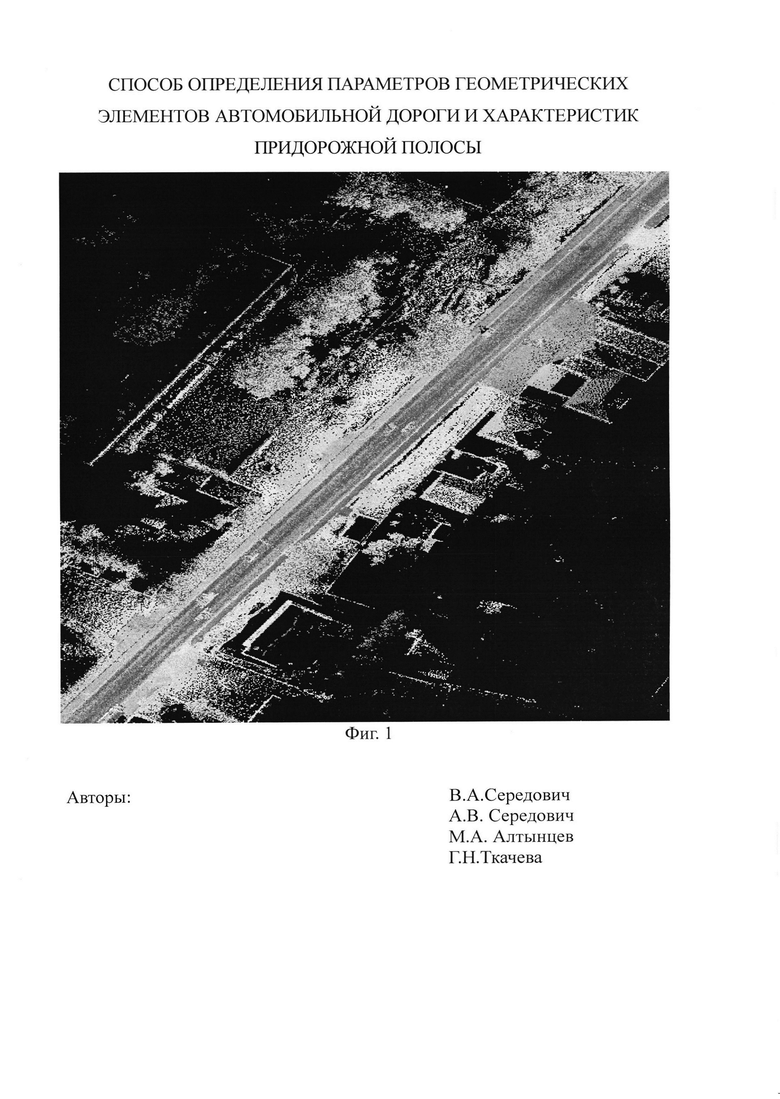
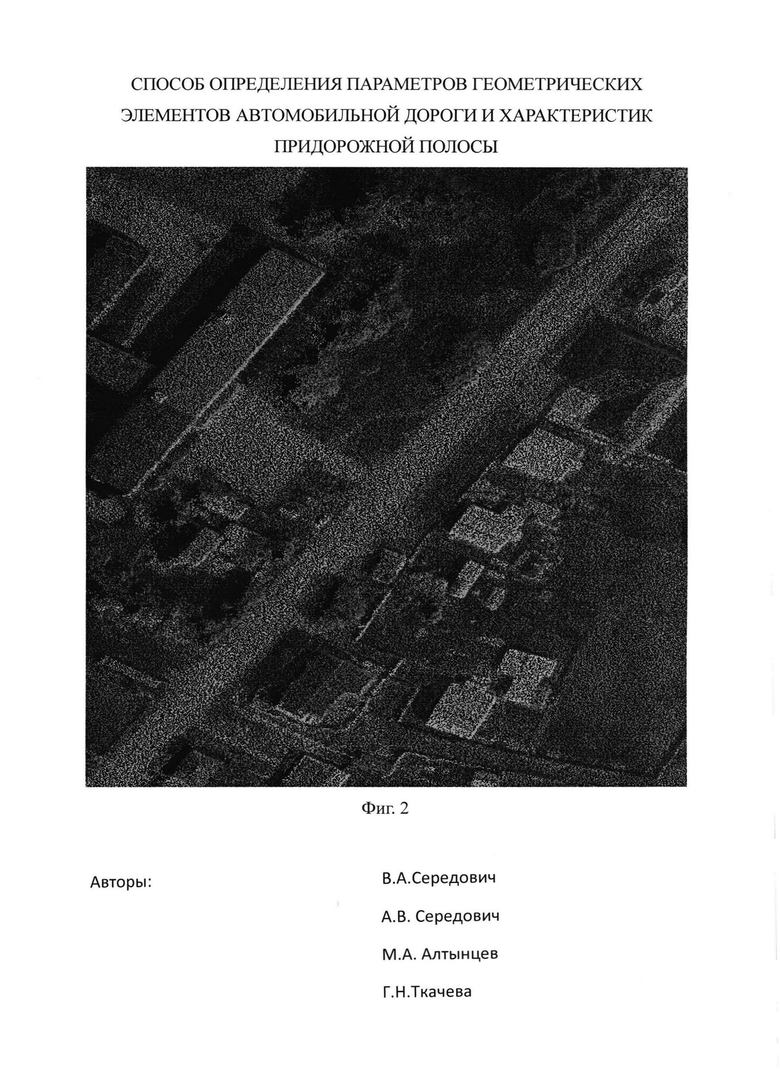
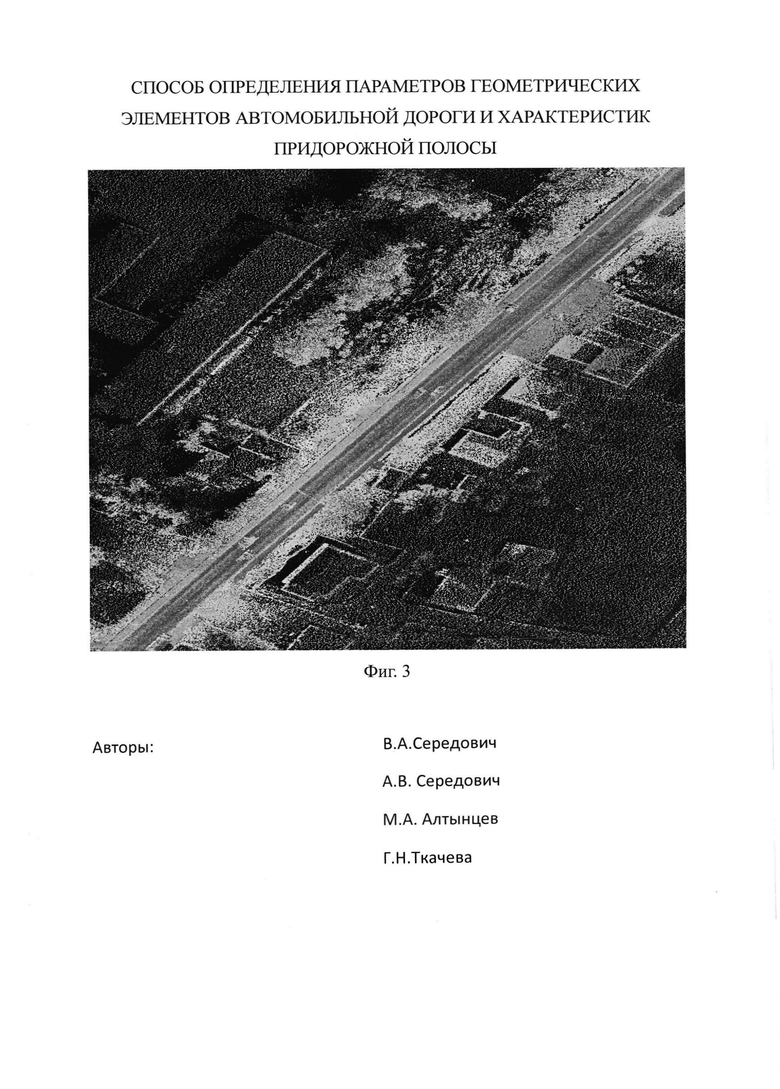
Способ поясняется чертежами. На фиг. 1 представлена схема создания фактической цифровой точечной трехмерной (3D) модели контролируемого участка автомобильной дороги и придорожной полосы по данным лазерного сканирования. На фиг. 2 представлена схема создания цифровой фотограмметрической модели контролируемого участка автомобильной дороги и придорожной полосы по данным съемки с беспилотных летательных аппаратов. На фиг. 3 представлена схема создания интегральной реалистической цифровой векторной трехмерной (3D) модели автомобильной дороги и придорожной полосы. Предлагаемый способ осуществляется следующим образом. Используя проектные данные контролируемых параметров геометрических элементов автомобильной дороги, строят эталонную трехмерную модель контролируемого участка. Построение указанной модели осуществляется посредством любого известного продукта, например AutoCAD. Выполняют планово-высотное обоснование (ПВО) контролируемого участка автомобильной дороги с помощью наземной или мобильной сканерной геодезической съемки в прямом и обратном направлении, где в качестве опорных пунктов ПВО служат базовые станции GPS, размещенные по обочине автомобильной, а также твердые точки по сторонам обочины дорожного полотна в виде оснований столбов дорожных знаков и элементов обустройства автомобильной дороги. Затем выполняют наземное или мобильное лазерное сканирование контролируемого участка по опорным пунктам ПВО, в результате чего определяют пространственные координаты по осям X, Y, Z точек отражения лазерного луча от поверхности дорожного полотна и прилегающих к нему участков и опорные пункты ПВО, которые идентифицируются на сканах, где пространственные координаты по осям X, Y соответствуют относительным плановым отметкам плановой сети, а пространственные координаты по оси Z соответствуют относительным высотным отметкам высотной сети. Получают скан, передают результаты сканирования (сканы) в ПЭВМ и с помощью компьютерной программы регистрируют в ней сканы, получают фактическую цифровую точечную трехмерную (3D) модель дорожного полотна, где каждая точка этой модели имеет пространственные координаты по осям X, Y, Z отраженного лазерного луча от поверхности измеряемого слоя и других элементов обустройства автомобильной дороги с интегрированными в нее пространственными координатами по осям X, Y, Z опорных пунктов ПВО (Фиг. 1). Далее выполняют маршрутное фотографирование контролируемого участка дорожного полотна и прилегающей территории на ширину до 200 метров от оси автодороги в прямом и обратном направлении на базе беспилотного летательного аппарата. Передают результаты фотографирования в ПЭВМ, с помощью компьютерной программы регистрируют в ней ортофотопланы и производят построение цифровой фотограмметрической модели поверхности дорожного полотна и прилегающих к нему участков (Фиг. 2). По опорным пунктам ПВО трансформируют ее пространственные данные в данные фактической цифровой векторной трехмерной (3D) модели и получают интегральную реалистическую цифровую векторную трехмерную (3D) модель контролируемого участка автомобильной дороги и прилегающих к нему участков (Фиг. 3), в этой же программе моделируют эталонную трехмерную модель автомобильной дороги, используя проектные значения измеряемых параметров геометрических элементов автомобильной дороги. Совмещают ее по тем же опорным пунктам ПВО с полученной интегральной реалистической цифровой векторной трехмерной (3D) моделью автомобильной дороги. Далее формируют с заданной дискретностью продольные сечения, в автоматическом режиме распознают расхождения между фактическими значениями контролируемых параметров геометрических элементов интегральной реалистической цифровой векторной трехмерной (3D) модели и значениями эталонной трехмерной модели контролируемого участка автомобильной дороги, сравнивая полученные данные, определяют линейные геометрические параметры автомобильной дороги по поверхности измеряемого слоя, необходимые при строительстве или реконструкции автомобильных дорог. Создание интегральной реалистической цифровой векторной трехмерной (3D) модели позволяет повысить эффективность работ за счет повышения достоверности и точности при определении значений параметров геометрических элементов автомобильной дороги и прилегающих к нему участков до значений 1-2 см. Также создание интегральной реалистической цифровой векторной трехмерной (3D) модели позволяет формировать информацию об объектах придорожной полосы за счет совместного анализа данных, полученных с помощью наземной или мобильной сканерной геодезической съемки и съемки на базе беспилотного летательного аппарата.
В целях повышения точности и достоверности при оценке качества всех основных элементов, параметров и характеристик автомобильных дорог, определяющих их транспортно-эксплуатационное состояние, предлагаемый способ позволяет автоматизировать весь процесс мониторинга состояния покрытия и обустройства автодороги и придорожной полосы.
Предлагаемый инновационный способ позволяет также повысить достоверность оценки параметров геометрических элементов автомобильных дорог при строительстве и контроле качества строительства и эксплуатации автомобильных дорог.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНОЙ РОВНОСТИ (КОЛЕЙНОСТИ) ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА АВТОМОБИЛЬНОЙ ДОРОГИ | 2016 |
|
RU2625091C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНОЙ ДОРОГИ ПО ЕЕ ГЕОМЕТРИЧЕСКИМ ПАРАМЕТРАМ | 2013 |
|
RU2526793C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТИ ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА | 2012 |
|
RU2509978C1 |
| Способ мониторинга дорожного полотна автомобильных дорог | 2021 |
|
RU2762538C1 |
| СПОСОБ ТРЁХМЕРНОГО (3D) КАРТОГРАФИРОВАНИЯ | 2014 |
|
RU2562368C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ ОТКЛОНЕНИЯ ОБРАЗУЮЩИХ СТЕНОК РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ОТ ВЕРТИКАЛИ | 2014 |
|
RU2572502C1 |
| СПОСОБ ПОЛУЧЕНИЯ, ОБРАБОТКИ И ОТОБРАЖЕНИЯ ГЕОПРОСТРАНСТВЕННЫХ ДАННЫХ В ФОРМАТЕ 3D С ПРИМЕНЕНИЕМ ТЕХНОЛОГИИ ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2015 |
|
RU2591173C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ ОТКЛОНЕНИЯ НАРУЖНОГО КОНТУРА ДНИЩА РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ОТ ГОРИЗОНТАЛИ | 2015 |
|
RU2590342C1 |
| Способ получения, обработки, отображения и интерпретации геопространственных данных для геодезического мониторинга деформационного состояния инженерного объекта | 2017 |
|
RU2668730C1 |
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ДЛЯ ОПРЕДЕЛЕНИЯ ВМЕСТИМОСТИ, СООТВЕТСТВУЮЩЕЙ ВЫСОТЕ ЕГО НАПОЛНЕНИЯ | 2013 |
|
RU2521212C1 |
Изобретение относится к области геодезического контроля в дорожно-строительной отрасли и может быть использовано при строительстве или реконструкции автомобильных дорог. В заявленном способе выполняют планово-высотное обоснование (ПВО) контролируемого участка автомобильной дороги с помощью наземной или мобильной сканерной геодезической съемки в прямом и обратном направлении, где в качестве опорных пунктов ПВО служат базовые станции GPS, размещенные по обочине автомобильной дороги, а также твердые точки по сторонам обочины дорожного полотна в виде оснований столбов дорожных знаков и элементов обустройства автомобильной дороги. Выполняют наземное или мобильное лазерное сканирование контролируемого участка по опорным пунктам ПВО, в результате чего определяют пространственные координаты по осям X, Y, Z точек отражения лазерного луча от поверхности дорожного полотна и опорные пункты ПВО, которые идентифицируются на сканах. Получают скан, передают результаты сканирования в ПЭВМ и с помощью компьютерной программы регистрируют в ней сканы, получают фактическую цифровую точечную трехмерную (3D) модель автомобильной дороги и придорожной полосы, Далее выполняют маршрутное фотографирование контролируемого участка дорожного полотна и прилегающей территории на ширину до 200 метров от оси автодороги в прямом и обратном направлении на базе беспилотного летательного аппарата. Передают результаты фотографирования в ПЭВМ, с помощью компьютерной программы регистрируют в ней ортофотопланы и производят построение цифровой фотограмметрической модели поверхности дорожного полотна и прилегающих к нему участков. По опорным пунктам ПВО трансформируют ее пространственные данные в данные фактической цифровой векторной трехмерной (3D) модели и получают интегральную реалистическую цифровую векторную трехмерную (3D) модель контролируемого участка автомобильной дороги и придорожной полосы, в этой же программе моделируют эталонную трехмерную модель автомобильной дороги и придорожной полосы. Совмещают ее по тем же опорным пунктам ПВО с полученной интегральной реалистической цифровой векторной трехмерной (3D) моделью автомобильной дороги и придорожной полосы. Далее формируют с заданной дискретностью продольные сечения, в автоматическом режиме распознают расхождения между фактическими значениями контролируемых параметров геометрических элементов интегральной реалистической цифровой векторной трехмерной (3D) модели и значениями эталонной трехмерной модели контролируемого участка автомобильной дороги и придорожной полосы, сравнивая полученные данные, определяют линейные геометрические параметры автомобильной дороги и придорожной полосы по поверхности измеряемого слоя, необходимые при строительстве или реконструкции автомобильных дорог. Технический результат - определение достоверных и точных значений параметров геометрических элементов автомобильной дороги и характеристик придорожной полосы с применением технологии лазерного сканирования. 3 ил.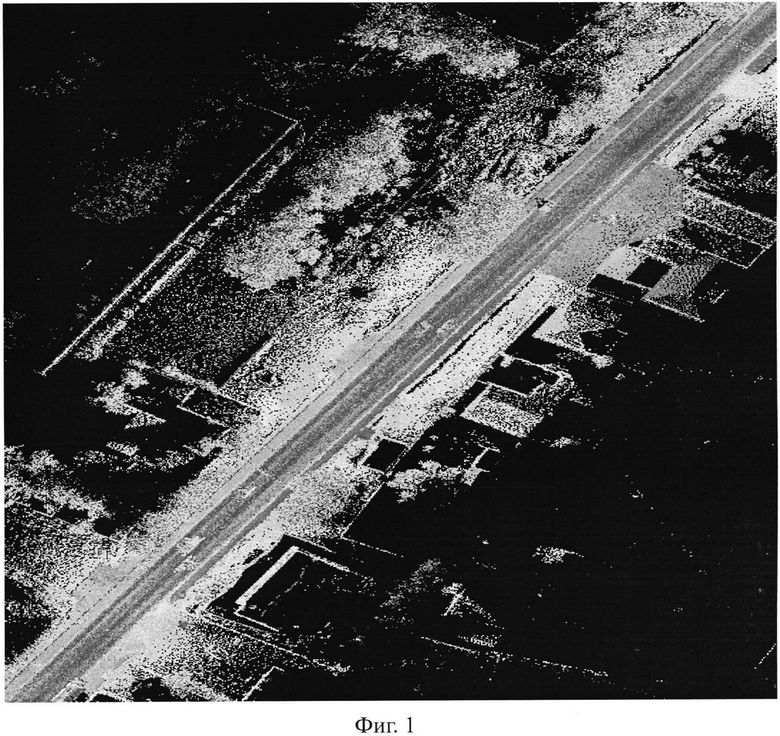
Способ определения параметров геометрических элементов автомобильной дороги и характеристик придорожной полосы, при котором определяют линейные геометрические параметры автомобильной дороги и характеристики придорожной полосы по поверхности измеряемого слоя, отличающийся тем, что выполняют планово-высотное обоснование (ПВО) контролируемого участка автомобильной дороги и ее придорожной полосы с помощью наземной или мобильной сканерной геодезической съемки в прямом и обратном направлении, где в качестве опорных пунктов ПВО служат базовые станции GPS, размещенные по обочине автомобильной дороги через заданный интервал, а также твердые точки по сторонам обочины дорожного полотна в виде оснований столбов дорожных знаков и элементов обустройства автомобильной дороги, выполняют наземное или мобильное лазерное сканирование контролируемого участка по опорным пунктам ПВО, в результате чего определяют пространственные координаты по осям X, Y, Z точек отражения лазерного луча от поверхности автомобильной дороги и придорожной полосы и опорные пункты ПВО, которые идентифицируются на сканах, где пространственные координаты по осям X, Y соответствуют относительным плановым отметкам плановой сети, а пространственные координаты по оси Z соответствуют относительным высотным отметкам высотной сети, получают скан, передают результаты сканирования (сканы) в ПЭВМ и с помощью компьютерной программы регистрируют в ней сканы, получают фактическую цифровую точечную трехмерную (3D) модель поверхности автомобильной дороги и придорожной полосы, где каждая точка этой модели имеет пространственные координаты
по осям X, Y, Z отраженного лазерного луча от поверхности измеряемого слоя и других элементов обустройства автомобильной дороги с интегрированными в нее пространственными координатами по осям X, Y, Z опорных пунктов ПВО, затем выполняют маршрутное фотографирование контролируемого участка дорожного полотна и прилегающей территории на ширину до 200 метров от оси автодороги в прямом и обратном направлении на базе беспилотного летательного аппарата, передают результаты фотографирования в ПЭВМ, с помощью компьютерной программы регистрируют в ней ортофотопланы и производят построение цифровой фотограмметрической модели поверхности дорожного полотна и прилегающих к нему участков, по опорным пунктам ПВО трансформируют ее пространственные данные в данные фактической цифровой векторной трехмерной (3D) модели и получают интегральную реалистическую цифровую векторную трехмерную (3D) модель контролируемого участка автомобильной дороги и придорожной полосы, в этой же программе моделируют эталонную трехмерную модель автомобильной дороги и придорожной полосы, используя проектные значения измеряемых параметров геометрических элементов автомобильной дороги, совмещают ее по тем же опорным пунктам ПВО с полученной интегральной реалистической цифровой векторной трехмерной (3D) моделью автомобильной дороги и придорожной полосы, формируют с заданной дискретностью продольные сечения, в автоматическом режиме распознают расхождения между фактическими значениями контролируемых параметров геометрических элементов интегральной реалистической цифровой векторной трехмерной (3D) модели и значениями эталонной трехмерной модели контролируемого участка автомобильной дороги, сравнивая полученные данные, определяют параметры геометрических элементов автомобильной дороги по поверхности измеряемого слоя, необходимые при строительстве или реконструкции автомобильных дорог, а также формируют информацию об объектах придорожной полосы за счет совместного анализа
данных, полученных с помощью наземной или мобильной сканерной геодезической съемки и съемки на базе беспилотного летательного аппарата.
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНОЙ ДОРОГИ ПО ЕЕ ГЕОМЕТРИЧЕСКИМ ПАРАМЕТРАМ | 2013 |
|
RU2526793C1 |
| СПОСОБ МОНИТОРИНГА АВТОМОБИЛЬНОЙ ДОРОГИ | 2002 |
|
RU2226673C2 |
| US 5166878 A1, 24.11.1992 | |||
| Электростатический микрофон | 1930 |
|
SU24003A1 |

