Область, к которой относится изобретение
Настоящее изобретение относится к способу контролирования высоты барабана врубовой машины в длинном забое и позиции врубовой машины в длинном забое и относится к области автоматизированного управления угледобывающим оборудованием.
Существующий уровень техники
Для регулировки высоты действующих автоматизированных забоев в настоящее время повсеместно применяется способ автоматического контроля высоты барабана врубовой машины в длинном забое на основе технологии резки по данным, зафиксированным в памяти устройства. Этот способ заключается в следующем: исходя из данных о состоянии угольного пласта в забое, оператор приводит в движение врубовую машину для выполнения первого реза. В системе управления сохраняются такие данные, как позиция при продвижении и высота резка, а впоследствии высота резки при определенной позиции автоматически регулируется компьютером по рабочим параметрам, сохраненным в памяти. При значительном изменении параметров угольного пласта, в особенности угла наклона, оператор врубовой машины должен вручную отрегулировать высоту так, чтобы новые параметры автоматически сохранились в памяти и применялись для подстройки для следующего реза. Способ резки по данным, сохраненным в памяти, отличается простотой, однако предъявляет особые требования к геологическим условиям. Этот способ можно применять только при разработке ровного забоя. Он не подходит для забоев, где угол наклона угольного пласта меняется. Причина того, почему этот способ не рекомендуется применять в забоях, где угол наклона угольного пласта меняется, заключается в том, что угол крена врубовой машины часто не совпадает с углом наклона угольного пласта.
Патент КНР № ZL 201310353737.7 раскрывает технологию точного позиционирования врубовой машины за счет использования информации о геосреде. Такая технология позволяет не только определить позицию и местонахождение врубовой машины, но и применить геоинформационную систему (ГИС) угольного пласта для забоя, в которой сочетаются географические, геологические, экологические данные, а также такие параметры, как координаты, скорость и позиция врубовой машины в той же системе пространства-времени, что позволяет точно определить местонахождение врубовой машины благодаря использованию информации о геосреде.
Краткое описание изобретения
Задача настоящего изобретения: Чтобы сгладить недостатки способа резки по данным, сохраненным в памяти, а именно, невозможность использования этого способа для забоев с изменением уклона угольного пласта, в настоящем изобретении предлагается способ автоматического контролирования позиции врубовой машины в длинном забое на основе геоинформационной системы угольного пласта, характеризующийся тем, что он позволяет подстроить угол крена врубовой машины к углу наклона угольного пласта.
Для достижения заявленной задачи в настоящем изобретении применяются следующее техническое решение: способ контролирования позиции врубовой машины в длинном забое на основе геоинформационной системы угольного пласта, характеризующийся тем, что состоит из следующих этапов:
1) создание на основе технических параметров и сопоставления параметров для врубовой машины, применяющейся в полностью механизированном длинном забое, гидравлической опоры и скребкового конвейера корреляционной модели между регулировочным значением глубины подрыва нижнего ножевого барабана врубовой машины и значением изменения угла крена врубовой машины, а именно, Δγ=арктангенс (Ah/d), где Δh - регулировочное значение глубины подрыва нижнего ножевого барабана врубовой машины, Δγ - значение изменения угла крена врубовой машины, d - расстояние продвижения по забою при выполнении одного реза врубовой машиной;
2) создание геоинформационной системы угольного пласта для забоя с использованием данных, полученных в ходе бурения, разведки туннеля и точной геофизической разведки, где геоинформационная система угольного пласта представляет собой данные по криволинейным поверхностям свода угольного пласта и подошвы угольного пласта, которые сохраняются в виде трехмерных сеток, и получение профиля свода угольного пласта и профиля подошвы угольного пласта в направлении продвижения врубовой машины по забою, а в системе координат геоинформационной системы угольного пласта точка начала разработки на подошве угольного пласта взята за начало отсчета, ось X соответствует направлению забоя, ось Y соответствует направлению продвижения по забою, а ось Z лежит противоположно направлению гравитационного ускорения врубовой машины;
3) определение точек изменения уклона на профиле подошвы угольного пласта путем использования минимального управляемого регулировочного значения δh глубины подрыва нижнего ножевого барабана врубовой машины в качестве контрольного параметра и поэтапная линеаризация профиля подошвы угольного пласта, включающая в себя следующие отдельные этапы:
31) выполнение поперечного сечения по оси Y в геоинформационной системе угольного пласта для забоя, получение профиля подошвы угольного пласта в направлении продвижения по забою, получение n точек A1, А2, …, An из профиля подошвы угольного пласта путем интерполяции с промежутком, равным расстоянию продвижения d забоя в процессе одного реза врубовой машины, получение координат в плоскости YZ для точек с А1 по An в то же время, при этом точка начала профиля подошвы угольного пласта является первой точкой А1, а точка окончания профиля подошвы угольного пласта - последней точкой An;
32) используя первой точки А1 в качестве первой точки изменения уклона на профиле подошвы угольного пласта, последней точки An в качестве последней точки изменения уклона на профиле подошвы угольного пласта и первой точки изменения уклона в качестве контрольной точки для расчета второй точки изменения уклона, расчет уклона k12 для линии, соединяющей первую точку изменения уклона и вторую точку А2, прилегающую к первой точке изменения уклона, с расчетом прогнозной координаты третьей точки A3 путем продления линии вдоль уклона k12, при этом, если абсолютное значение разницы между прогнозной координатой и фактическим значением третьей точки A3 будет меньше, чем δh, выполняется расчет уклона k23 для линии, соединяющей вторую точку А2 и третью точку A3, прилегающую ко второй точке А2, с расчетом прогнозной координаты четвертой точки А4 путем продления линии вдоль уклона k23, и так далее до тех пор, пока абсолютное значение разницы между прогнозной координатой и фактическим значением точки не будет больше или равно δh, в таком случае такая точка используется в качестве второй точки изменения уклона профиля подошвы угольного пласта, после чего остальные точки изменения уклона профиля подошвы угольного пласта определяются последовательно с использованием вышеописанного способа расчета и ранее определенной точки изменения уклона в качестве контрольной точки для расчета следующей точки изменения уклона;
33) поэтапная линеаризация профиля подошвы угольного пласта исходя по всем полученным точкам изменения уклона профиля подошвы угольного пласта;
4) получение информации о позиции и местонахождении врубовой машины в длинном забое в режиме реального времени за счет технологии позиционирования врубовой машины с использованием информации о геосреде, определение на основе полученной в реальном времени информации о позиции врубовой машины прямолинейного отрезка на линейном профиле подошвы угольного пласта, где работает врубовая машина, получение угла наклона α угольного пласта по арктангенсу уклона прямолинейного отрезка и расчет регулировочного значения Ah=d tan (γ-α) глубины подрыва нижнего ножевого барабана врубовой машины по полученному в режиме реального времени углу крена γ врубовой машины и корреляционной модели между регулировочным значением глубины подрыва нижнего ножевого барабана врубовой машины и значения изменения угла крена врубовой машины, что позволяет подстроить угол крена врубовой машины под угол наклона угольного пласта.
Полезный эффект: Предложенный способ эффективно сочетает управление позицией врубовой машины и определение угла наклона угольного пласта, что позволяет подстроить угол крена врубовой машины к углу наклона угольного пласта. В настоящем способе внедряется концепция поэтапного линейного представления угольного пласта, а сам способ позволяет снизить требования к хранению объемов данных геоинформационной системы угольного пласта и быстро получить данные об угле наклона угольного пласта. Способ отличается концептуальной простотой, несложными расчетами, надежностью, удобством в практическом применении. Этот способ может быть эффективным для улучшения автоматизации управления врубовой машиной при разработке угольных пластов, залегающих в сложных геологических условиях.
Краткое описание чертежей:
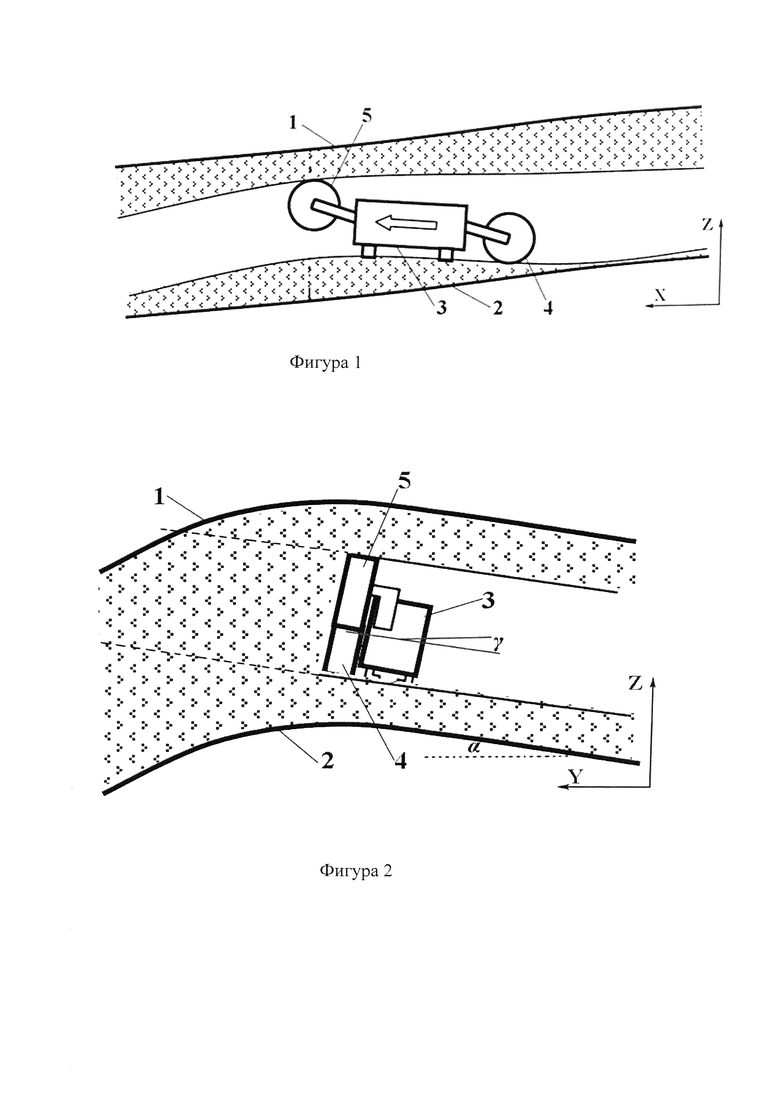
Фигура 1 - схематический вид спереди врубовой машины в режиме резки;
Фигура 2 - схематический вид сбоку врубовой машины в режиме резки;
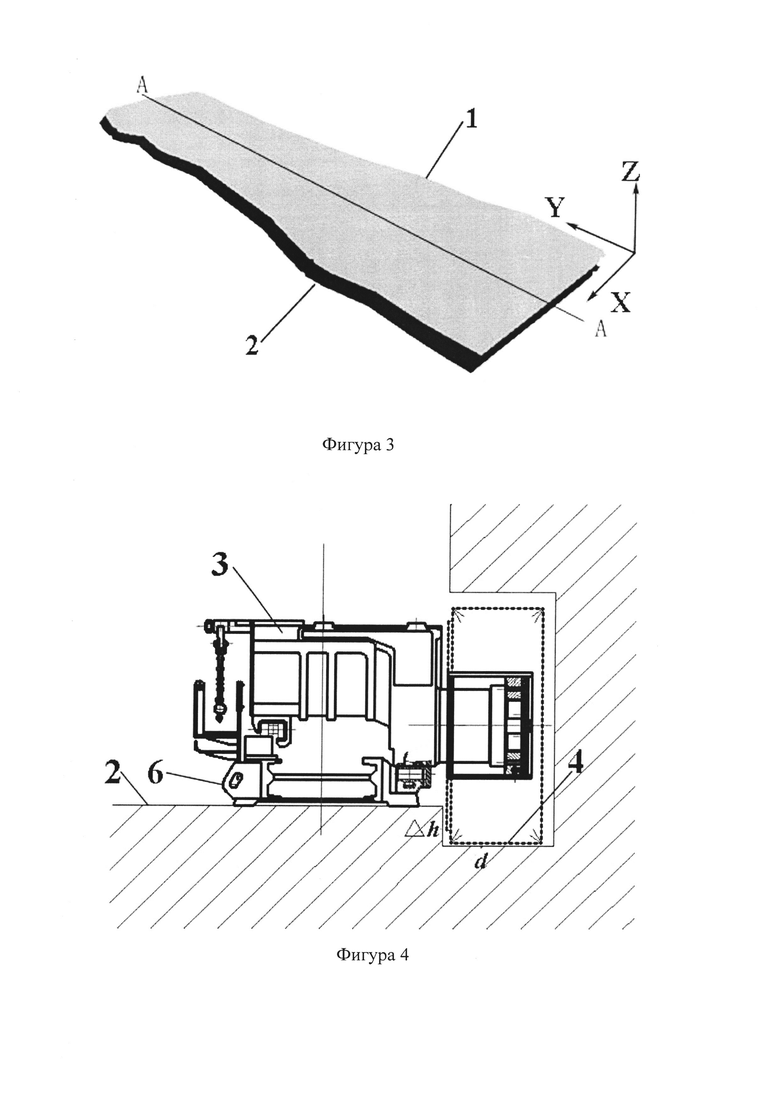
Фигура 3 - схема системы координат географической информационной системы угольного пласта для забоя согласно настоящему изобретению;
Фигура 4 - схема регулировки глубины подрыва врубовой машины;
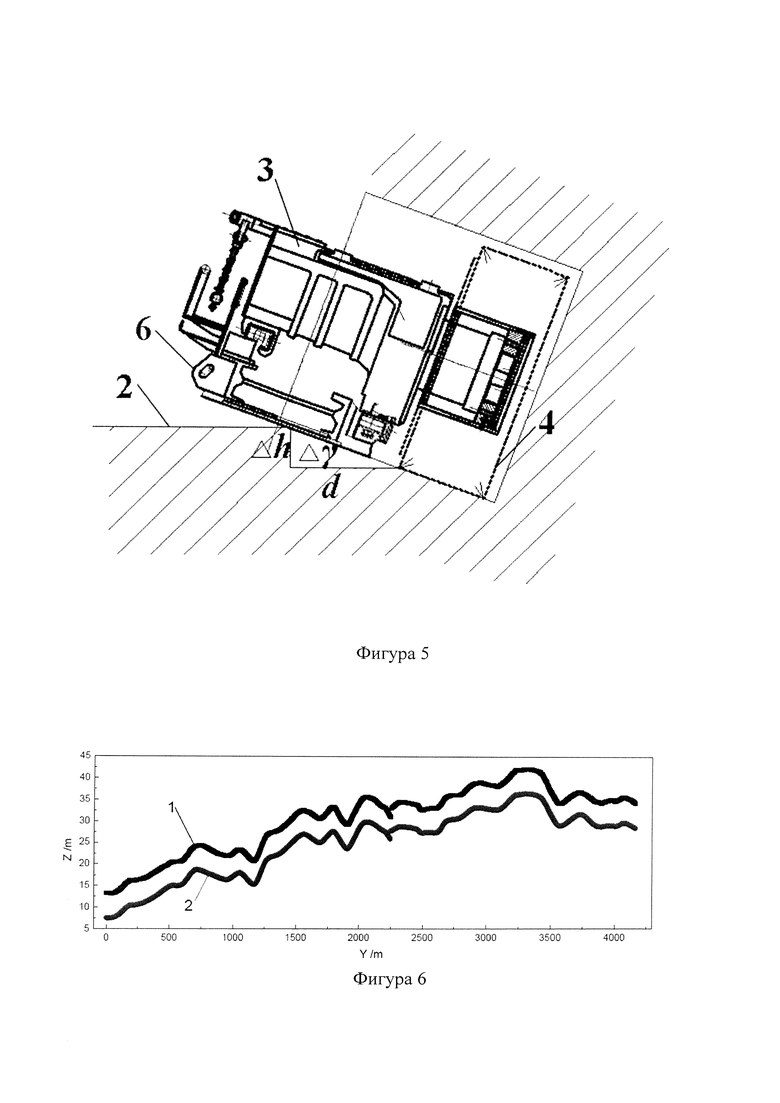
Фигура 5 - схема изменения положения врубовой машины по мере регулировки глубины подрыва;
Фигура 6 - профиль свода угольного пласта и профиль подошвы угольного пласта в направлении продвижения врубовой машины;
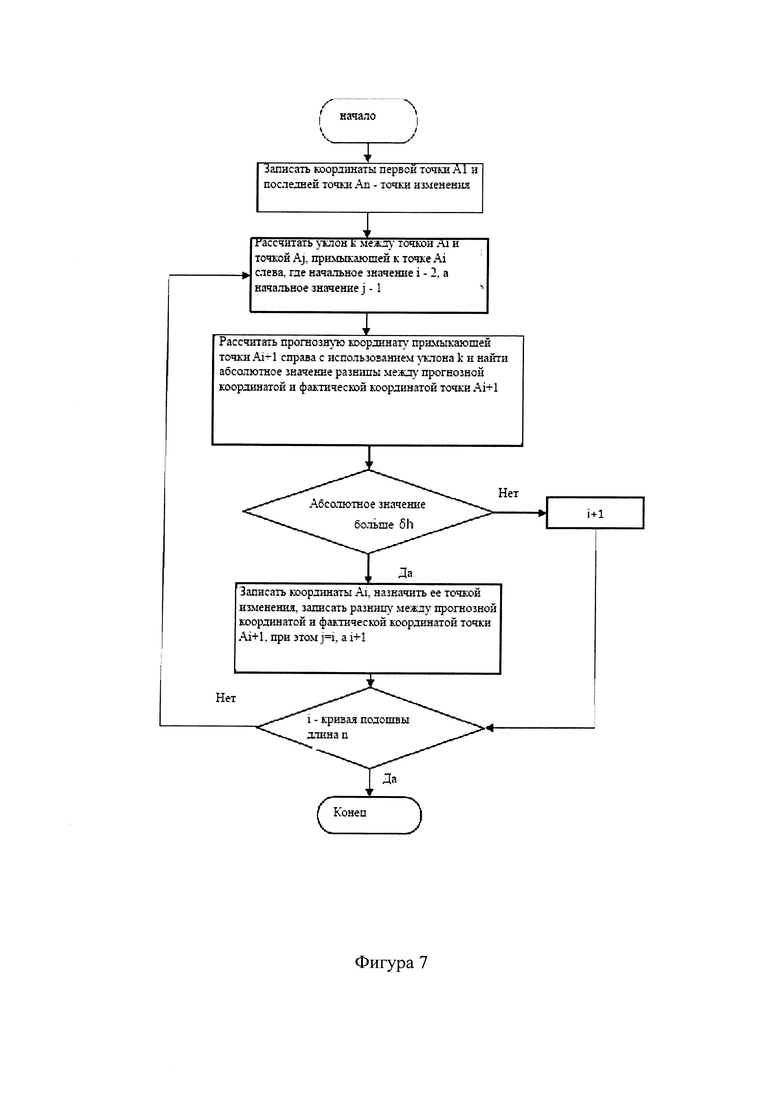
Фигура 7 - алгоритмическая схема поэтапного линейного представления профиля подошвы угольного пласта согласно настоящему изобретению;
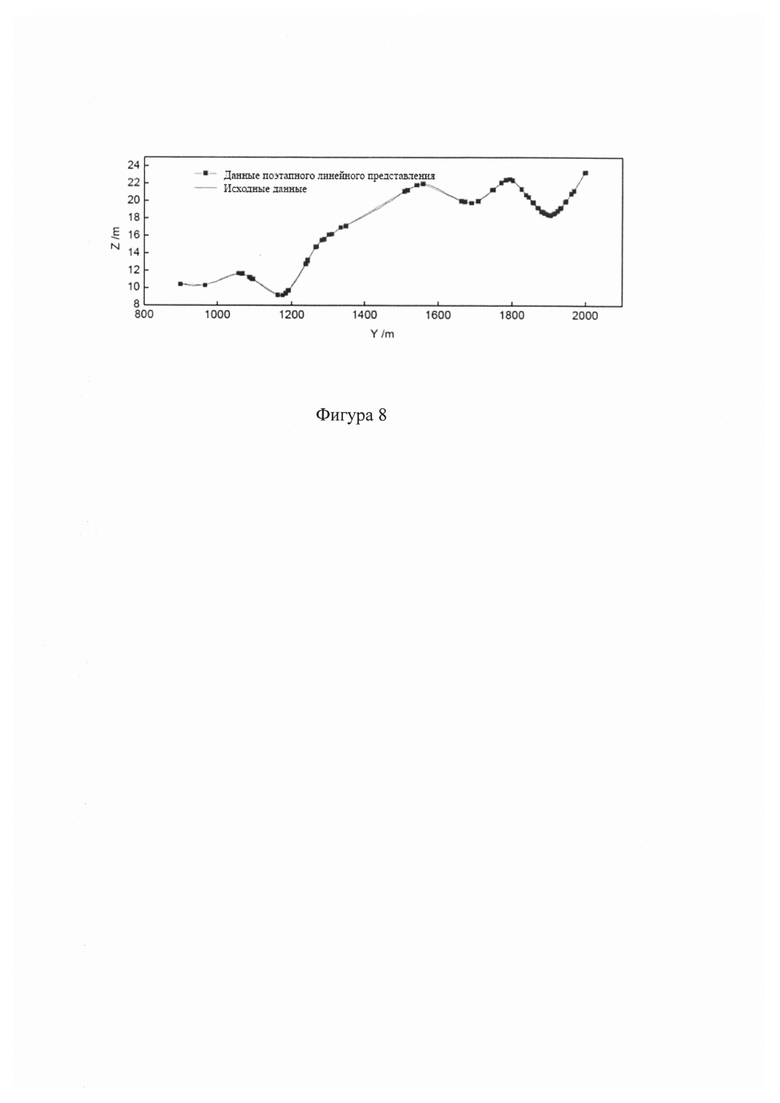
Фигура 8 - сравнительная схема поэтапного линейного профиля и оригинала профиля подошвы угольного пласта согласно настоящему изобретению.
На чертежах: 1. Свод угольного пласта; 2, Подошва угольного пласта; 3. Врубовая машина; 4. Нижний режущий барабан врубовой машины; 5. Верхний режущий барабан врубовой машины; 6. Скребковый конвейер.
Описание вариантов осуществления
Ниже приводится описание вариантов осуществления изобретения со ссылкой на чертежи.
Как показано на Фигуре 1 и Фигуре 2, врубовая машина выполняет рез в угольном пласте. Рез, который выполняет верхний режущий барабан врубовой машины, расположен рядом со сводом угольного пласта, а рез, который выполняет нижний режущий барабан - рядом с подошвой угольного пласта. Внутренний угол между подошвой угольного пласта и направлением продвижения врубовой машины - угол наклона α угольного пласта. Внутренний угол между корпусом врубовой машины и направлением продвижения врубовой машины - угол крена γ врубовой машины. В начальной точке разработки угол крена γ врубовой машины совпадает с углом наклона α угольного пласта. Однако по мере продвижения по забою угол наклона α угольного пласта изменяется. Если не отрегулировать положение врубовой машины, возникает риск повреждения свода угольного пласта.
В настоящем изобретении предлагается способ контролирования позиции врубовой машины в длинном забое на основе геоинформационной системы угольного пласта. Согласно этому способу, глубина подрыва нижнего режущего барабана врубовой машины настраивается под угол крена врубовой машины. Способ включает в себя следующие этапы:
1) создание на основе технических параметров и сопоставления параметров для врубовой машины, применяющейся в полностью механизированном длинном забое, гидравлической опоры и скребкового конвейера корреляционной модели между регулировочным значением глубины подрыва нижнего ножевого барабана врубовой машины и значением изменения угла крена врубовой машины, а именно, Δγ=арктангенс (Ah/d), где, как показано на Фигуре 3 и Фигуре 4, Δh - регулировочное значение глубины подрыва нижнего ножевого барабана врубовой машины, Δγ - значение изменения угла крена врубовой машины, d - расстояние продвижения по забою при выполнении одного реза врубовой машиной;
2) создание геоинформационной системы угольного пласта для забоя с использованием данных, полученных в ходе бурения, разведки туннеля и точной геофизической разведки, где, как показано на Фигуре 1 и Фигуре 3, геоинформационная система угольного пласта представляет собой данные по криволинейным поверхностям свода угольного пласта и подошвы угольного пласта, которые сохраняются в виде трехмерных сеток, и получение профиля свода угольного пласта и профиля подошвы угольного пласта в направлении продвижения врубовой машины по забою, а в системе координат геоинформационной системы угольного пласта точка начала разработки на подошве угольного пласта взята за начало отсчета, ось X соответствует направлению забоя, ось Y соответствует направлению продвижения по забою, а ось Z лежит противоположно направлению гравитационного ускорения врубовой машины;
3) определение точек изменения уклона на профиле подошвы угольного пласта путем использования минимального управляемого регулировочного значения δh глубины подрыва нижнего ножевого барабана врубовой машины в качестве контрольного параметра и поэтапная линеаризация профиля подошвы угольного пласта, включающая в себя следующие отдельные этапы:
31) как показано на Фигуре 3 и Фигуре 6, выполнение поперечного сечения по оси Y в геоинформационной системе угольного пласта для забоя, получение профиля подошвы угольного пласта в направлении продвижения по забою, получение n точек A1, А2,…, An из профиля подошвы угольного пласта путем интерполяции с промежутком, равным расстоянию продвижения d забоя в процессе одного реза врубовой машины, получение координат в плоскости YZ для точек с A1 по An в то же время, при этом точка начала профиля подошвы угольного пласта является первой точкой А1, а точка окончания профиля подошвы угольного пласта - последней точкой An;
32) как показано на Фигуре 7, используя первой точки А1 в качестве первой точки изменения уклона на профиле подошвы угольного пласта, последней точки An в качестве последней точки изменения уклона на профиле подошвы угольного пласта и первой точки изменения уклона в качестве контрольной точки для расчета второй точки изменения уклона, расчет уклона k12 для линии, соединяющей первую точку изменения уклона и вторую точку А2, прилегающую к первой точке изменения уклона, с расчетом прогнозной координаты третьей точки A3 путем продления линии вдоль уклона k12, при этом, если абсолютное значение разницы между прогнозной координатой и фактическим значением третьей точки A3 будет меньше, чем δh, выполняется расчет уклона k23 для линии, соединяющей вторую точку А2 и третью точку A3, прилегающую ко второй точке А2, с расчетом прогнозной координаты четвертой точки А4 путем продления линии вдоль уклона k23, и так далее до тех пор, пока абсолютное значение разницы между прогнозной координатой и фактическим значением точки не будет больше или равно δh, в таком случае такая точка используется в качестве второй точки изменения уклона профиля подошвы угольного пласта, после чего остальные точки изменения уклона профиля подошвы угольного пласта определяются последовательно с использованием вышеописанного способа расчета и ранее определенной точки изменения уклона в качестве контрольной точки для расчета следующей точки изменения уклона;
33) как показано на Фигуре 8, поэтапная линеаризация профиля подошвы угольного пласта исходя по всем полученным точкам изменения уклона профиля подошвы угольного пласта;
4) получение информации о позиции и местонахождении врубовой машины в длинном забое в режиме реального времени за счет технологии позиционирования врубовой машины с использованием информации о геосреде, определение на основе полученной в реальном времени информации о позиции врубовой машины прямолинейного отрезка на линейном профиле подошвы угольного пласта, где работает врубовая машина, получение угла наклона α угольного пласта по арктангенсу уклона прямолинейного отрезка и расчет регулировочного значения Δh=d tan (γ-α) глубины подрыва нижнего ножевого барабана врубовой машины по полученному в режиме реального времени углу крена γ врубовой машины и корреляционной модели между регулировочным значением глубины подрыва нижнего ножевого барабана врубовой машины и значения изменения угла крена врубовой машины, что позволяет подстроить угол крена врубовой машины под угол наклона угольного пласта
Вышеприведенное описание представляет собой предпочтительный вариант осуществления настоящего изобретения. Следует отметить, что специалист в состоянии вносить усовершенствования и модификации, не отходя от принципа настоящего изобретения. Любые подобные изменения и модификации подпадают в область патентной защиты настоящего изобретения.
Изобретение относится к способу контролирования высоты барабана врубовой машины в длинном забое и позиции врубовой машины в длинном забое и относится к области автоматизированного управления угледобывающим оборудованием. Способ включает в себя: создание корреляционной модели между регулировочным значением глубины подрыва нижнего ножевого барабана врубовой машины и значением изменения угла крена врубовой машины. Создание геоинформационной системы угольного пласта для забоя и получение профиля свода угольного пласта и профиля подошвы угольного пласта в направлении продвижения врубовой машины по забою. Определение точек изменения уклона на профиле подошвы угольного пласта и поэтапная линеаризация профиля подошвы угольного пласта. Получение информации о позиции и местонахождении врубовой машины в длинном забое в режиме реального времени за счет технологии позиционирования врубовой машины с использованием информации о геосреде, расчет регулировочного значения глубины подрыва нижнего ножевого барабана врубовой машины с использованием корреляционной модели между регулировочным значением глубины подрыва нижнего ножевого барабана и значением изменения угла крена врубовой машины, чтобы контролировать позицию врубовой машины. Предложенный способ эффективно сочетает управление позицией врубовой машины и определение угла наклона угольного пласта, что позволяет подстроить угол крена врубовой машины к углу наклона угольного пласта. 8 ил.
Способ контролирования позиции врубовой машины в длинном забое на основе геоинформационной системы угольного пласта, характеризующийся тем, что состоит из следующих этапов:
1) создание на основе технических параметров и сопоставления параметров для врубовой машины, применяющейся в полностью механизированном длинном забое, гидравлической опоры и скребкового конвейера корреляционной модели между регулировочным значением глубины подрыва нижнего ножевого барабана врубовой машины и значением изменения угла крена врубовой машины, а именно Δγ=арктангенс (Δh/d), где Δh - регулировочное значение глубины подрыва нижнего ножевого барабана врубовой машины, Δγ - значение изменения угла крена врубовой машины, d - расстояние продвижения по забою при выполнении одного реза врубовой машиной;
2) создание геоинформационной системы угольного пласта для забоя с использованием данных, полученных в ходе бурения, разведки туннеля и точной геофизической разведки, где геоинформационная система угольного пласта представляет собой данные по криволинейным поверхностям свода угольного пласта и подошвы угольного пласта, которые сохраняются в виде трехмерных сеток, и получение профиля свода угольного пласта и профиля подошвы угольного пласта в направлении продвижения врубовой машины по забою, а в системе координат геоинформационной системы угольного пласта точка начала разработки на подошве угольного пласта взята за начало отсчета, ось X соответствует направлению забоя, ось Y соответствует направлению продвижения по забою, а ось Z лежит противоположно направлению гравитационного ускорения врубовой машины;
3) определение точек изменения уклона на профиле подошвы угольного пласта путем использования минимального управляемого регулировочного значения δh глубины подрыва нижнего ножевого барабана врубовой машины в качестве контрольного параметра и поэтапная линеаризация профиля подошвы угольного пласта, включающая в себя следующие отдельные этапы:
3)1. выполнение поперечного сечения по оси Y в геоинформационной системе угольного пласта для забоя, получение профиля подошвы угольного пласта в направлении продвижения по забою, получение n точек А1, А2, …, An из профиля подошвы угольного пласта путем интерполяции с промежутком, равным расстоянию продвижения d забоя в процессе одного реза врубовой машины, получение координат в плоскости YZ для точек с A1 по An в то же время, при этом точка начала профиля подошвы угольного пласта является первой точкой А1, а точка окончания профиля подошвы угольного пласта - последней точкой An;
3)2. использование первой точки A1 в качестве первой точки изменения уклона на профиле подошвы угольного пласта, последней точки An в качестве последней точки изменения уклона на профиле подошвы угольного пласта и первой точки изменения уклона в качестве контрольной точки для расчета второй точки изменения уклона, расчет уклона k12 для линии, соединяющей первую точку изменения уклона и вторую точку А2, прилегающую к первой точке изменения уклона, с расчетом прогнозной координаты третьей точки А3 путем продления линии вдоль уклона k12, при этом, если абсолютное значение разницы между прогнозной координатой и фактическим значением третьей точки А3 будет меньше, чем δh, выполняется расчет уклона k23 для линии, соединяющей вторую точку А2 и третью точку А3, прилегающую ко второй точке А2, с расчетом прогнозной координаты четвертой точки А4 путем продления линии вдоль уклона k23, и так далее до тех пор, пока абсолютное значение разницы между прогнозной координатой и фактическим значением точки не будет больше или равно δh, в таком случае такая точка используется в качестве второй точки изменения уклона профиля подошвы угольного пласта, после чего остальные точки изменения уклона профиля подошвы угольного пласта определяются последовательно с использованием вышеописанного способа расчета и ранее определенной точки изменения уклона в качестве контрольной точки для расчета следующей точки изменения уклона;
3)3. поэтапная линеаризация профиля подошвы угольного пласта исходя по всем полученным точкам изменения уклона профиля подошвы угольного пласта;
4) получение информации о позиции и местонахождении врубовой машины в длинном забое в режиме реального времени за счет технологии позиционирования врубовой машины с использованием информации о геосреде, определение на основе полученной в реальном времени информации о позиции врубовой машины прямолинейного отрезка на линейном профиле подошвы угольного пласта, где работает врубовая машина, получение угла наклона α угольного пласта по арктангенсу уклона прямолинейного отрезка и расчет регулировочного значения Δh=d tan (γ-α) глубины подрыва нижнего ножевого барабана врубовой машины по полученному в режиме реального времени углу крена γ врубовой машины и корреляционной модели между регулировочным значением глубины подрыва нижнего ножевого барабана врубовой машины и значения изменения угла крена врубовой машины, что позволяет подстроить угол крена врубовой машины под угол наклона угольного пласта.
| Способ управления очистным комплексом | 1988 |
|
SU1523661A1 |
| RU 2012105576 A, 27.08.2013 | |||
| СПОСОБ ПОЛУЧЕНИЯ ПРИЗАБОЙНОГО ПРОСТРАНСТВА С ПРИМЕНЕНИЕМ СИСТЕМ АВТОМАТИЗАЦИИ | 2009 |
|
RU2505677C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ИЛИ МЕСТА КОМПОНЕНТОВ В ВЫЕМОЧНЫХ УСТАНОВКАХ ГОРНОЙ ДОБЫЧИ И ВЫЕМОЧНАЯ УСТАНОВКА | 2011 |
|
RU2538007C2 |
| US 5904210 A1, 18.05.1999 | |||
| НАСОС | 2017 |
|
RU2640662C1 |

