Изобретение относится к способу автоматического получения заданного призабойного пространства в имеющих забойный конвейер, очистной комбайн с барабанным исполнительным органом в качестве добычной машины, а также гидравлическую щитовую крепь действующих очистных забоях в подземной разработке месторождений каменного угля.
Проблема при автоматическом управлении действующими очистными забоями, как в направлении разработки, так и в направлении очистной выемки очистного комбайна с барабанным исполнительным органом заключается, среди прочего, в том, чтобы, с одной стороны получить достаточно большое призабойное пространство для того, чтобы обеспечить проход забойного оборудования, например, без столкновений между очистным комбайном с барабанным исполнительным органом и остовами щитовой крепи при прохождении мимо них очистного комбайна с барабанным исполнительным органом, а с другой стороны, поддерживать как можно меньшим выход пустой породы при добычных работах, то есть по возможности ограничивать добычную работу горизонтом пласта без того чтобы заодно вырезать слишком много боковой породы. По существу имеющиеся в распоряжении перед очистной выемкой данные месторождения о мощности пласта, уровне почвы пласта или же кровли пласта и наличии седловин и/или впадин, как в направлении разработки, так и в продольном направлении забойного оборудования, то есть в направлении очистной выемки, слишком неточны для того, чтобы на этом можно было основывать автоматизированное управление добычными и крепежными работами.
Поэтому в основе изобретения лежит задача разработки способа указанного вначале вида, с помощью которого на основе получаемых на забойном оборудовании данных является возможной автоматизация добычных и крепежных работ в отношении получения заданного призабойного пространства.
Решение этой задачи следует, включая благоприятные варианты осуществления и усовершенствования изобретения, из содержания формулы изобретения, которая изложена за этим описанием.
В своей основной идее изобретение предусматривает способ режущей добычи с помощью очистного комбайна с барабанным исполнительным органом, в котором посредством по меньшей мере одного из установленных на перекрытии кровли пласта остовов щитовой крепи датчиков наклона определяется наклон перекрытия кровли пласта относительно горизонтали в направлении разработки и/или в направлении очистной выемки очистного комбайна с барабанным исполнительным органом, и из определенных таким образом углов прохождения кровли пласта на остовах щитовой крепи устанавливается прохождение горизонта кровли пласта, и в котором за счет регистрации шагового перемещения каждого остова щитовой крепи с помощью расположенного на опорном полозе остова щитовой крепи устройства для измерения перемещений определяется глубина реза очистного комбайна с барабанным исполнительным органом при каждом добычном ходе, и в котором, кроме того, с помощью расположенных на очистном комбайне с барабанным исполнительным органом датчиков регистрируется высота реза очистного комбайна с барабанным исполнительным органом, при этом установка высоты реза очистного комбайна с барабанным исполнительным органом направляется на соответствующий угол прохождения кровли пласта для получения заданного призабойного пространства.
С изобретением связано то преимущество, что сначала на основе определяемых со сравнительно малыми затратами углов прохождения кровли пласта на остовах щитовой крепи в распоряжении имеется параметр для управления забоем с достаточной точностью и надежностью. Другие привлекаемые согласно изобретению параметры состоят в регистрации ведения реза добычной машины за счет установки ее абсолютной высоты реза, с одной стороны, и соответствующей глубины реза, с другой стороны, которая может быть выведена из регистрации шагового перемещения отдельных остовов щитовой крепи. На основе полученных таким образом данных горизонт кровли пласта может быть использован в качестве задающего параметра для работы резания.
Управление работой резания дополнительно улучшается за счет того, что посредством установленных по меньшей мере на трех из четырех основных конструктивных деталях каждого остова щитовой крепи, таких как опорный полоз, завальный щит, опорные направляющие рычаги и перекрытие кровли пласта, датчиков наклона определяется наклон перекрытия кровли пласта относительно горизонтали, и из измеренных данных в блоке вычислительной машины посредством сравнения с заложенными в нем, задающими геометрическую ориентацию деталей и их движение во время шагового перемещения базисными данными определяется в каждом случае соответствующая пласту высота щита в области между перекрытием кровли пласта и опорным полозом, и из этого, с учетом конструктивной высоты перекрытия кровли пласта и опорного полоза, определяется соответствующая пласту высота свободно вырезаемого очистным комбайном с барабанным исполнительным органом забойного пространства, и в котором на основе принятых данных определяется геометрия свободно вырезанного забойного пространства на каждом остове щитовой крепи. С привлечением высоты щита в качестве дополнительного параметра или же задающей величины рассчитывается геометрия соответственно созданного очистным комбайном с барабанным исполнительным органом забойного пространства, которая за несколько следующих один за другим добычных ходов делает возможным создание модели прохождения горизонта пласта в направлении разработки, которая может быть скорректирована с помощью имеющихся в распоряжении данных месторождения. С помощью этих данных возможно значительно лучше задавать и соблюдать в работе автоматически выполняемый на протяжении одного добычного хода очистного комбайна с барабанным исполнительным органом, как и на протяжении нескольких следующих один за другим добычных ходов профиль реза для очистного комбайна с барабанным исполнительным органом.
Согласно примеру осуществления изобретения предусмотрено, что высоты реза совершающего рез кровли пласта опережающего барабана у кровли пласта и совершающего рез почвы пласта отстающего барабана у почвы пласта определяются на основе регистрирующих положение кронштейнов барабанов датчиков, и при прохождении очистного комбайна с барабанным исполнительным органом мимо каждого остова щитовой крепи общая высота реза приводится в соотношение с установленным с помощью вычислительной машины на соответствующем остове щитовой крепи размером призабойного пространства. Таким образом, является возможным согласование движения очистного комбайна с барабанным исполнительным органом через забой с положением отдельных остовов используемой щитовой крепи.
Согласно примеру осуществления изобретения способ управления согласно изобретению усовершенствуется за счет того, что наклон конвейера и/или очистной комбайн с барабанным исполнительным органом относительно горизонтали в направлении шагового перемещения остовов щитовой крепи устанавливается посредством установленных на конвейере и/или очистном комбайне с барабанным исполнительным органом датчиков наклона. При этом сначала достаточно установки датчика наклона на очистном комбайне с барабанным исполнительным органом. Хотя движущийся на забойном конвейере и направляемый на нем очистной комбайн с барабанным исполнительным органом в определенной мере образует узел с забойным конвейером, для повышения точности может быть целесообразным также регистрировать наклон забойного конвейера посредством установленного на нем датчика наклона. При определенных условиях, для целей управления уже достаточно установки датчика наклона только лишь на забойном конвейере.
В частности, при этом может быть предусмотрено, что угол наклона конвейера и/или очистного комбайна с барабанным исполнительным органом приводится с соотношение с установленным на опорном полозе остова щитовой крепи и/или на перекрытии кровли пласта углом наклона, и образованный из этого разностный угол вовлекается в расчет получающегося при нескольких следующих один за другим добычных ходах очистного комбайна с барабанным исполнительным органом призабойного пространства. С этим связано то преимущество, что за счет этого является лучше контролируемым скопление впадин пласта или седловин пласта, так как для управления может быть применено историческое, становящееся определяемым до фронта очистных работ прохождение пласта, так что посредством своевременного управления вводом добычной деятельности может быть оказано влияние на положение и поперечное сечение, а тем самым и геометрию забойного пространства в горизонте пласта.
Сравнение заданной высоты щита с фактической высотой щита может наслаиваться возникновением конвергенции, которая уменьшает свободно вырезанное призабойное пространство против опорного действия примененной щитовой крепи. Так, Согласно примеру осуществления изобретения предусмотрено, что при снижении величины для высоты реза ниже высоты щита определяется наступившая конвергенция, и конвергенция компенсируется путем адаптации высоты реза очистного комбайна с барабанным исполнительным органом, предпочтительно путем повышения так называемого подреза, при котором барабан у почвы пласта врезается в горизонт почвы пласта, так как в обычном случае врезания в горизонт кровли пласта следует избегать. За счет этой меры может быть целенаправленно компенсировано влияние конвергенции на высоту забойного пространства. При этом также может быть предусмотрено, что в случае запланированных простоев в работе призабойное пространство увеличивается на величину ожидаемой за время простоя конвергенции.
Поскольку подлежащий отбойке горизонт пласта зачастую в направлении разработки имеет ярко выраженные впадины и/или седловины, эти впадины и седловины на протяжении горизонта пласта также могут быть установлены на основе данных для положения остовов щитовой крепи, и по этому может ориентироваться добычная работа очистного комбайна с барабанным исполнительным органом. Так, например, наезд на седловину определяется установленным изменением наклона прилегающего к кровле пласта перекрытия кровли пласта щитовой крепи. Из величины изменения наклона между двумя шагами перемещения остова щитовой крепи вперед может быть рассчитано изменение высоты в смысле уменьшения высоты для каждого следующего шагового продвижения соответствующей остова щитовой крепи. Для того чтобы поддерживать призабойное пространство на желаемом заданном уровне и препятствовать уменьшению размера призабойного пространства, на добычной машине должно быть выполнено управляющее движение для проведения подреза, то есть врезания в горизонт почвы пласта. Затем, перед превышением высотного пункта седловины ставится распознаваемым изменение наклона перекрытия кровли пласта относительно горизонтали. Это должно быть привлечено к тому, чтобы своевременно управлять работой резания с отводом выполненного тем временем подреза, чтобы и при прохождении седловины соблюдалась заданная высота призабойного пространства. Соответствующие управляющие операции, но с противоположным знаком, должны быть произведены и при прохождении впадины, при котором преобладают в принципе те же самые направления.
Установленные на остовах щитовой крепи датчики наклона также дают меру наклона остовов щитовой крепи поперек направления разработки, так как и в направлении очистной выемки очистного комбайна с барабанным исполнительным органом на протяжении забоя седловины и впадины могут быть ярко выраженными. Так как прохождение кровли пласта и почвы пласта в продольном направлении забойного оборудования выводится из поперечного наклона остовов щитовой крепи, существует возможность управлять опережающим барабаном у кровли пласта и отстающим барабаном у почвы пласта очистного комбайна с барабанным исполнительным органом в ходе непрерывного направления реза таким образом, чтобы не происходил нежелательный рез кровли пласта или же при определенных условиях превышающий необходимую величину врез в почву пласта, так чтобы предотвращался ненужный забор пустой породы или оставление угля или возникновение узких мест между очистным комбайном с барабанным исполнительным органом и щитовой крепью.
В производственной практике разработки месторождений каменного угля подход к автоматизации добычных работ состоит в том, чтобы перед началом добычи проводить управляемый вручную обучающий ход очистного комбайна с барабанным исполнительным органом, при котором происходит ручное направление барабанов на горизонте кровли пласта и относительно горизонта почвы пласта. Используемый при обучающем ходе профиль реза регистрируется и вводится в память блока вычислительной машины, при этом во время следующих за обучающим ходом добычных ходов очистного комбайна с барабанным исполнительным органом автоматически выполняет введенный в память профиль реза. С этим связан тот недостаток, что при возникающих изменениях горизонта пласта, таких как изменяющаяся мощность пласта или появление волнистого залегания с седловинами и впадинами по меньшей мере в частичных областях забоя, введенный в память профиль реза продолжает отрабатываться очистным комбайном с барабанным исполнительным органом, что очень быстро приводит к нежелательным рабочим состояниям и требует нового ручного обучающего хода. Еще один недостаток состоит в том, что профиль реза всегда исходит из остающейся одинаковой глубины реза барабанов, и поэтому изменяющиеся на протяжении забоя глубины реза остаются неучтенными для последующего определения добычной работы.
Дополнительное вовлечение этого образа действий при установке высоты реза очистного комбайна с барабанным исполнительным органом на основе определенного угла прохождения кровли пласта или же рассчитанной из зарегистрированных данных геометрии полученного забойного пространства дает возможность заблаговременно определять, соответствует ли заданный профиль реза очистного комбайна с барабанным исполнительным органом все еще фактическим геологическим условиям, и при возникающих отклонениях вмешиваться в ведение реза барабанов, включая адаптацию глубины их реза, до того, как возникают нежелательные рабочие состояния. Таким образом направление реза может дольше удерживаться в горизонте пласта, так что реже нужно проводить новый обучающий ход для определения измененного профиля реза. Кроме того, соответственно актуализированный на геологические условия профиль реза дает возможность при прохождении зон забоя со сколами кровли пласта, при которых измерение наклона перекрытий кровли пласта щитовой крепи неизбежно ведет к ложным допущениям относительно общего прохождения горизонта кровли пласта, выполненный последний раз профиль реза сохранять неизменным до тех пор, пока после прохождения зоны скола перекрытий кровли пласта соответствующие остова щитовой крепи снова не будут иметь контакт с невредимым горизонтом кровли пласта.
Указанное выше совместное использование управлений также действует и при вовлечении наклонного положения барабанов очистного комбайна с барабанным исполнительным органом за счет того, что при обучающем ходе очистного комбайна с барабанным исполнительным органом устанавливается угол продольного наклона и/или угол поперечного наклона барабанов очистного комбайна с барабанным исполнительным органом относительно вертикали и привлекается при установлении подлежащего последующему выполнению профиля реза, при этом возникающие при последующих добычных ходах угловые отклонения компенсируются. Так как барабан у почвы пласта создает опорную поверхность для забойного конвейера и щитовой крепи, отклонения углового положения, прежде всего барабана у почвы пласта, приводят к повороту плоскости реза очистного комбайна с барабанным исполнительным органом, при этом этот поворот при следующих один за другим добычных ходах прогрессивно усиливается, то есть при необходимых подрезах барабана усиливается эффект погружения забойного оборудования, а при необходимых для адаптации к изменениям прохождения кровли пласта поперечных резах барабана усиливается эффект восхождения забойного оборудования. Поэтому предусмотрено при установленных угловых отклонениях производить коррекцию.
Другой, также известный в производственной практике подход к автоматизации состоит в том, что на основе данных установленных на очистном комбайне с барабанным исполнительным органом и направленных на угольный забой инфракрасных камер определяется положение внедренных в пласт породных прослойков, и на основе внутренне присущего пласту, известного положения породного прослойка относительно горизонта кровли пласта во время добычного хода определяется прохождение горизонта кровли пласта в направлении очистной выемки, и по этому направляется положение опережающего барабана у кровли пласта при последующем добычном ходе очистного комбайна с барабанным исполнительным органом, и при этом положение отстающего барабана у почвы пласта определяется при допущении остающейся одинаковой мощности пласта. Недостаток этой техники заключается в том, что обнаружение породных прослойков с помощью инфракрасной камеры происходит при очень неблагоприятных условиях окружающей среды, таких как пыль, тепло, вибрации, так что точное обнаружение жил породных прослойков в горизонте пласта не всегда является возможным. После обнаружения и локализации жил породных прослойков ведение разреза барабанов управляется в соответствии с установленным расстоянием до кровли пласта и почвы пласта. Прежде всего, отклонения от положенной в основу мощности пласта могут приводить к отклонениям направления реза отстающего барабана у почвы пласта от прохождения граничного слоя. Кроме того, всегда должна резаться установленная максимальная мощность для того, чтобы не оставлять пачку угля под кровлей. Поскольку в геологии расстояния положенных в основу жил породных прослойков для направления реза в качестве задающей величины до кровли пласта и до почвы пласта колеблются, обусловленные системой отклонения направления реза являются неизбежными, так как расстояния жил породных прослойков до кровли пласта и почвы пласта принимаются постоянными.
Поскольку в соответствии с этим, в подлежащем отбойке пласте имеются достаточно ярко выраженные жилы породных прослойков, с вовлечением этих породных прослойков в качестве задающей величины для направления реза барабана у кровли пласта в управление согласно изобретению может быть связано то преимущество, что положение горизонта кровли пласта может быть всегда проверено на основе полученных из положения узлов щитовой крепи данных, так что неправильное управление работой резания является предотвращаемым.
В этом отношении может быть предусмотрено, что определенное из установленных углов прохождения кровли пласта в области остовов щитовой крепи прохождение кровли пласта сравнивается с заданным посредством обучающего хода и/или на основе определения положения породного прослойка профилем реза очистного комбайна о барабанным исполнительным органом, и при устанавливаемом с помощью вычислительной машины врезании очистного комбайна с барабанным исполнительным органом в кровлю пласта производится коррекция направления реза опережающего барабана у кровли пласта для адаптации к прохождению кровли пласта, при этом, кроме того, производится адаптация направления реза отстающего барабана у почвы пласта к коррекции направления реза опережающего барабана у кровли пласта для получения заданного призабойного пространства.
Кроме того, в DE 202007014710 U1 изложено предложение, с помощью установленного на машинном корпусе очистного комбайна с барабанным исполнительным органом между его барабанами и направленного на угольный забой радиолокационного датчика во время добычного хода определять прохождение горизонта кровли пласта в направлении очистной выемки, так что является устанавливаемым прохождение горизонта кровли пласта. И эта мера также является применяемой в рамках управления согласно изобретению, при этом предусмотрено, что установление с помощью радара прохождение горизонта кровли пласта сравнивается с выведенным из положения остовов щитовой крепи и, тем самым, из определенных углов прохождения кровли пласта прохождением горизонта кровли пласта, и при необходимости производится коррекция высоты реза очистного комбайна с барабанным исполнительным органом. Кроме того, посредством радиолокационного датчика дополнительно может определено прохождение горизонта почвы пласта в направлении очистной выемки очистного комбайна с барабанным исполнительным органом и установлено положение отстающего барабана у почвы пласта относительно положения горизонта почвы пласта и, при необходимости, скорректировано положение барабана. За счет этого может быть в целом улучшена точность работы резания очистного комбайна с барабанным исполнительным органом.
Наконец, из публикации «Inertial Navigation: Enabling Technology for Longwall Mining Automation» автора D.C. Reid (Ди. Си. Райд «Бортовая навигация: высокоэффективная технология для автоматизации механизированного забоя») из D.W. Hainsworth, J.C. Ralston, R.J. McPhee & С.О. Hargrave, CSIRO, Mining Automation, 1 Technology Court, Pullenvale, Old, Australia 4069 известно, посредством установленных на барабанах, подходящих для инерциальной навигации датчиков непрерывно регистрировать соответствующее положение барабанов в забойном пространстве в виде пространственных координат и при расположении в ряд зарегистрированных во время добычного хода пространственных координат моделировать в трехмерном пространстве свободно вырезанный барабанами добычный канал. При этом является возможным обеспечивать постоянное качество направления реза барабанов очистного комбайна с барабанным исполнительным органом и при ранее известных изменениях параметров пласта посредством задания подлежащих достижению пространственных координат адаптировать направлении реза барабанов. Однако, и с этим известным способом, аналогично вышеупомянутому способу обучающего хода, связан тот недостаток, что не предусмотрено автоматическое ориентирование направления реза очистного комбайна с барабанным исполнительным органом на горизонте пласта, и фактическое прохождение горизонта кровли пласта не привлекается в качестве управляющей величины для направления реза. Эти недостатки путем дополнительного учета указанной выше регистрации положения барабанов посредством пространственных координат к управлению согласно изобретению могут быть устранены за счет того, что смоделированный в трехмерном пространстве добычный канал сравнивается с рассчитанной с вовлечением положения остовов щитовой крепи геометрией забойного пространства. Поскольку при расчете геометрии забойного пространства положение забойного конвейера при продвигающемся вперед очистном забое продолжает записываться посредством измерения перемещений шагающего цилиндра, возникают обусловленные системой ошибки, которые могут непрерывно накапливаться, так что принятое в забойном пространстве положение забойного конвейера заметно отклоняется от фактического положения забойного конвейера. За счет регистрации положения барабанов и, тем самым, также и положения забойного конвейера на основе полученных с помощью инерциальной навигации пространственных координат можно было бы при каждом добычном ходе дополнительно регистрировать абсолютное положение забойного конвейера и синхронизировать его с принятым положением забойного конвейера в геометрии забойного пространства, так что, например, маркшейдерские коррекционные измерения больше не являются необходимыми, и указанная ошибка больше не накапливается на протяжении многих циклов передвижения остовов щитовой крепи.
Этот образ действий должен быть перенесен и на то, что посредством расположения в ряд смоделированных для нескольких следующих один за другим добычных ходов добычных каналов в трехмерном пространстве создается модель для прохождения горизонта пласта в направлении разработки и сравнивается с рассчитанной на основе рассчитанных для последовательности из нескольких добычных ходов соответственно в их геометрии забойных пространств моделью прохождения горизонта пласта.
Кроме того, согласно примеру осуществления изобретения в качестве дополняющей меры по управлению может быть предусмотрено, что посредством по меньшей мере одного установленного на основном корпусе барабанов очистного комбайна с барабанным исполнительным органом радиолокационного датчика измеряется расстояние между верхним краем основного корпуса барабанов и нижней стороной подводящего опору при добычной работе перекрытия кровли пласта остова щитовой крепи и в качестве фактической величины для проходной высоты очистного комбайна с барабанным исполнительным органом под остовами щитовой крепи вводится в блок вычислительной машины и сравнивается там с заложенной в его память заданной величиной, при этом при установленном отклонении формируются управляющие команды для адаптации высоты реза по меньшей мере одного из обоих барабанов очистного комбайна с барабанным исполнительным органом.
С этим связано то преимущество, что цель управления - сохранение заданного размера призабойного пространства во время добычных ходов очистного комбайна с барабанным исполнительным органом - может быть достигнута со сравнительно малыми затратами. Измеренная как расстояние между верхним краем корпуса машины и нижней стороной перекрытия кровли пласта остовов щитовой крепи проходная высота является непосредственной мерой также и для призабойного пространства, так как призабойное пространство складывается из проходной высоты и занятых забойным оборудованием и тем самым неизменных расстояний до кровли пласта, с одной стороны, и до почвы пласта или же свободно вырезанного барабаном у почвы пласта горизонта почвы пласта, с другой стороны. Так, выходящее за пределы проходной высоты расстояние до кровли пласта задано размерами перекрытия кровли пласта, в то время как расстояние радиолокационных датчиков до горизонта почвы пласта задано конструктивной высотой расположенного на горизонте почвы пласта забойного конвейера и перемещаемого на нем машинного корпуса очистного комбайна с барабанным исполнительным органом. Таким образом, соответственно измеренная для проходной высоты величина может быть непосредственно привлечена в качестве синонима для высоты призабойного пространства. При этом операции по управлению могут быть проведены быстрее. Предварительно заданная в блоке вычислительной машины заданная величина для призабойного пространства задана, или данными месторождения, то есть, прежде всего, мощностью пласта, или же определяется минимальной проходной высотой забойного оборудования. Также и заданная величина, в зависимости от конструктивных данных забойного оборудования, может быть представлена как заданная величина для проходного проема.
Согласно примеру осуществления изобретения предусмотрено, что проведенное на основе радиолокационного измерения определение высоты забоя может быть дополнено тем, что из полученных на остовах щитовой крепи данных рассчитывается в каждом случае соответствующая пласту высота каждого остова щитовой крепи на переднем конце перекрытия кровли пласта в качестве меры для фактического размера призабойного пространства, и определенные таким образом фактические величины расчета высоты щита подводятся на обрабатывающий фактические величины из измерения проходной высоты блок вычислительной машины. В то время как радиолокационное измерение дает данные в каждом случае только во время прохода добычной машины под соответствующим остовом щитовой крепи, и поэтому слишком малая проходная высота не может быть определена заранее и учтена при установлении параметров добычи, с дополняющем определением размера призабойного пространства на переднем конце перекрытия кровли пласта связано то преимущество, что при этом полученные на отдельных остовах щитовой крепи данные дополнительно поясняют поведение отдельных участков фронта очистных работ или же всего фронта очистных работ при продвигающейся вперед очистной выемке.
Так, из отношения рассчитанного и измеренного размера призабойного пространства к действующим для соответствующего очистного забоя данным месторождения, таким как, например, при определенных условиях изменяющейся по длине забоя мощности пласта, заранее можно сделать заключение о том, существует ли опасность соударения в пределах забойного оборудования в связи с нагружающей остова щитовой крепи кровлей пласта, или существует ли угроза превышения верхнего предела перестановки остовов щитовой крепи при желаемой автоматической эксплуатации. Указанные выше моменты опасности относятся, прежде всего, к прохождению седловин или впадин в форме прохождения пласта, что можно заранее учитывать путем соответствующей установки высоты реза очистного комбайна с барабанным исполнительным органом. Кроме того, соответствующие данные призабойного пространства могут объяснять возможное обрушение из кровли пласта, возникновение сужений пласта, «движение по углю» очистного комбайна с барабанным исполнительным органом, или же возможное врезание очистного комбайна с барабанным исполнительным органом в почву пласта.
Таким образом, регистрация высоты щита дает данные для ожидаемого размера призабойного пространства в прогнозе, которые затем могут быть сравнены с измеренными очистным комбайном с барабанным исполнительным органом при его прохождении данными. При этом лучше оценивается точность обоих способов. Оба способа образуют взаимное дополнение в том отношении, что при проверке соответствующего размера призабойного пространства имеется избыточность. Еще одно преимущество состоит в том, что и в случае отказа одной из обеих систем определения размера призабойного пространства добыча может быть продолжена на основе оставшейся измерительной системы.
Поскольку в одном примере осуществления изобретения предусмотрено, что дополнительно установленные соответственно сформированными управляющими командами при следующих один за другим добычных ходах величины коррекции для высоты реза барабанов сравниваются между собой, и определенная из величин коррекции суммарная величина привлекается в качестве меры для начавшейся конвергенции, которая учитывается при будущих добычных ходах при определении необходимой адаптации высоты реза барабанов, таким образом могут быть сделаны заключения о начавшейся между тем конвергенции. Если во время первого добычного хода возникает необходимость коррекции для высоты реза, то для следующего добычного хода может быть проверено, вырезается ли заданное призабойное пространство после выполнения коррекции. Если же при этом снова возникает необходимость в коррекции, то она может быть вызвана только начавшейся тем временем конвергенцией.
На чертеже изображены примеры осуществления изобретения, которые описаны ниже. Показано на:
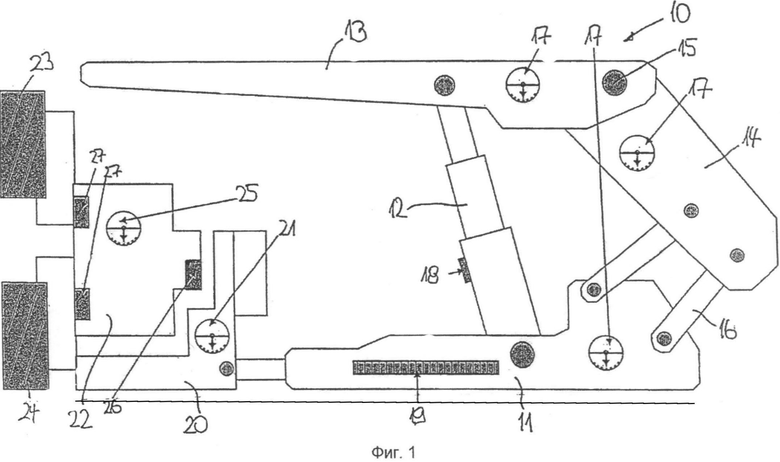
Фиг.1: остов щитовой крепи с установленными на ней датчиками наклона в соединении с забойным конвейером и очистным комбайном с барабанным исполнительным органом в качестве добычной машины в схематическом виде сбоку,
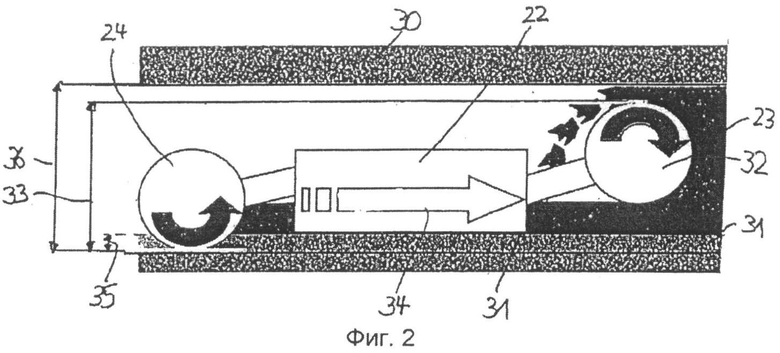
Фиг.2: забойное оборудование согласно фиг.1 при эксплуатации в схематическом изображении,
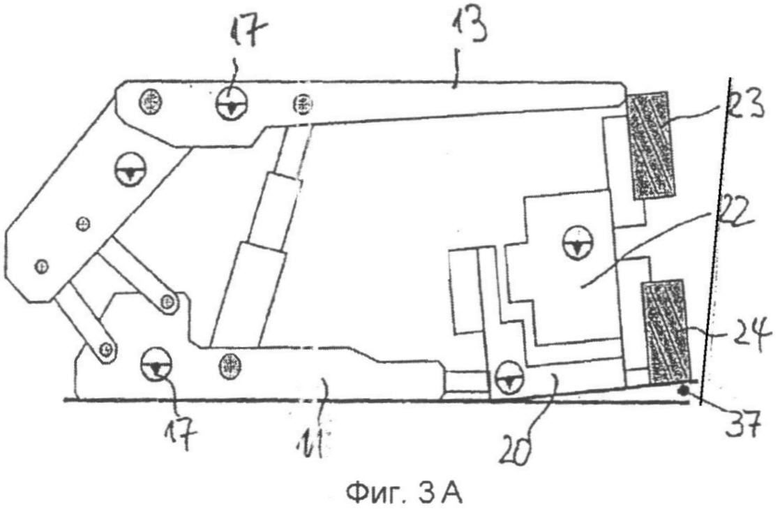
Фиг.3А: забойное оборудование согласно фиг.1 при восходящем наклоне добычной машины,
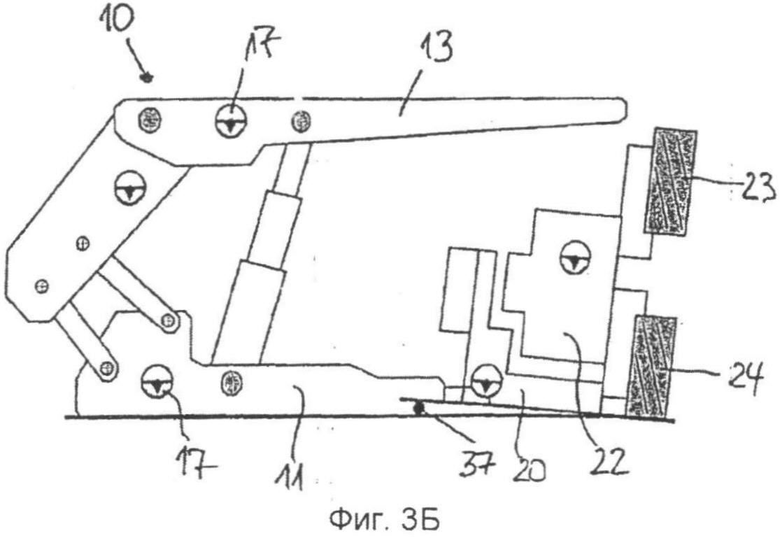
Фиг.3Б: забойное оборудование согласно фиг.1 при нисходящем наклоне добычной машины,
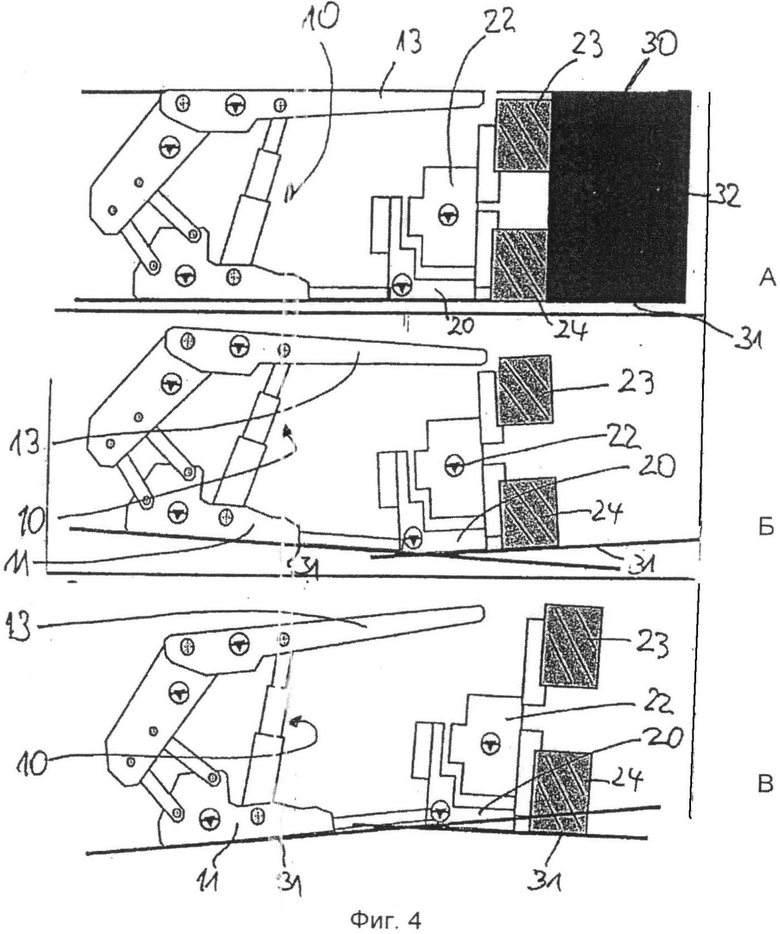
Фиг.4А-В: забойное оборудование согласно фиг.1 при прохождении впадин и прохождении седловин в схематическом изображении,
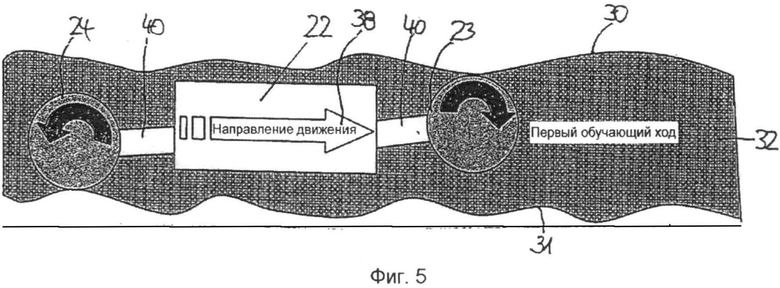
Фиг.5: служащий для установки профиля реза обучающий ход очистного комбайна с барабанным исполнительным органом в схематическом изображении,
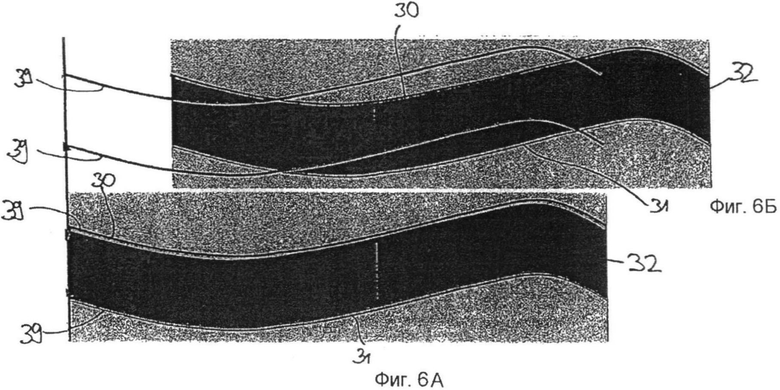
Фиг.6А, Б: лияние изменения условий пласта на установленный профиль реза в схематическом изображении,
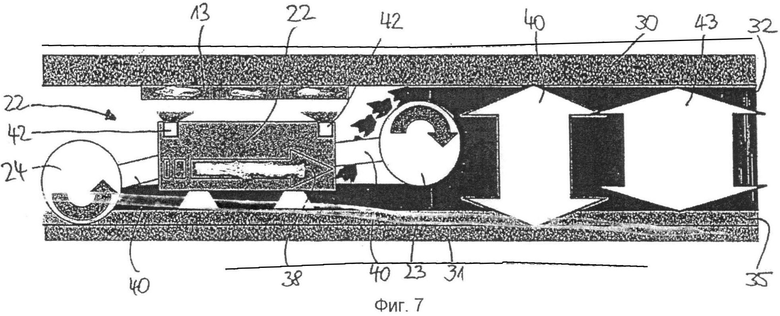
Фиг.7: забойное оборудование с очистным комбайном с барабанным исполнительным органом и показанными только со своими перекрытиями кровли пласта остовами щитовой крепи в эксплуатации в схематическом виде спереди, при рассмотрении в направлении разработки,
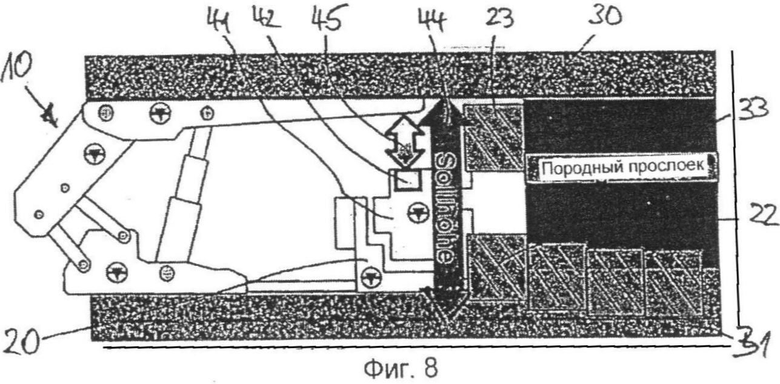
Фиг.8: забойное оборудование согласно фиг.7 в виде сбоку.
На поясненных далее фигурах поясняются основы способа согласно изобретению в его обеспечивающем возможность регистрации высоты щита варианте осуществления.
Представленное на фиг.1 забойное оборудование содержит, прежде всего, остов 10 щитовой крепи с опорным полозом 11, на которой с параллельным расположением установлены две стойки 12, из которых на фиг.1 видна только одна, и которые на своем верхнем конце несут перекрытие 13 кровли пласта. В то время как перекрытие 13 кровли пласта на своем переднем (левом) конце выступает в направлении еще подлежащего описанию очистного комбайна с барабанным исполнительным органом, на его заднем (правом) конце перекрытия 13 кровли пласта посредством шарнира 15 подсоединен завальный щит 14, при этом завальный щит опирается на в виде сбоку два покоящихся на опорном полозе 11 опорных направляющих рычага 16. В показанном примере осуществления на остове 10 щитовой крепи установлены три датчика 17 наклона, а именно один датчик 17 наклона на опорном полозе 11, один датчик 17 наклона в задней области перекрытия 13 кровли пласта около шарнира 15, и один датчик 17 наклона на завальном щите 14.
Как далее не показано, на четвертой подвижной детали остова 10 щитовой крепи, опорных направляющих рычагах 16, также может быть предусмотрен датчик наклона, при этом из четырех возможных датчиков 17 наклона должны быть встроены соответственно три датчика наклона для того, чтобы с помощью определенных ими величин наклона определить положение остова щитовой крепи в очистном пространстве. В этом отношении изобретение не ограничено представленным конкретно на фигуре 1 расположением датчиков наклона, а охватывает все возможные комбинации из трех датчиков наклона на четырех подвижных деталях остова щитовой крепи.
Показанный на фиг.1 остов щитовой крепи прикреплен к забойному конвейеру 20, который также имеет датчик 21 наклона, так что в отношении управления забойным оборудованием, в общем, также и здесь могут быть получены данные относительно положения конвейера. На забойном конвейере 20 установлен очистной комбайн 22 с барабанным исполнительным органом с верхним барабаном 23 и нижним барабаном 24, при этом и в области очистного комбайна 22 с барабанным исполнительным органом установлен датчик 25 наклона, также датчик 26 для регистрации соответствующего местоположения очистного комбайна 22 с барабанным исполнительным органом в забое, а также измерительные стержни 27 для измерения высоты реза очистного комбайна 22 с барабанным исполнительным органом, Измерительная техника забойного оборудования дополняется установкой датчиков 18 на стойках 12, с помощью которых является возможным изменение уровня перекрытия 13 кровли пласта посредством установки высоты выдвижения стоек 12. Кроме того, в опорный полоз интегрирована измерительная система 19, с помощью которой является устанавливаемым соответствующий шаговый ход остова 10 щитовой крепи в отношении к забойному конвейеру 20. Так как забойный конвейер 20 продвигается вперед в направлении угольного забоя посредством опирающихся на остове 10 щитовой крепи цилиндров, выполняемый остовом 10 щитовой крепи при подтягивании шаговый ход в каждом случае должен быть приравнен глубине реза барабанов очистного комбайна 22 с барабанным исполнительным органом. Как уже было указано, размещение датчиков 21 наклона на забойном конвейере 20 не является настоятельно необходимым, если на очистном комбайне 22 с барабанным исполнительным органом установлен датчик 25 наклона. В таком случае датчик 21 наклона может быть дополнительно предусмотрен для повышения точности измерений.
При работе забойного оборудования в соответствии с фиг.1 в нормальном случае возникает рабочая ситуация, так как она в качестве примера показана на фиг.2. Ненарушенный между кровлей 30 пласта и почвой 31 пласта горизонт 32 пласта разрабатывается очистным комбайном 22 с барабанным исполнительным органом, при этом высота 33 реза продвигающегося в направлении 34 очистной выемки очистного комбайна 22 с барабанным исполнительным органом установлена так, что нижним барабаном 24 выполняется врез 35 в почву пласта. При этом передний верхний барабан 23 установлен так, что он под кровлей 30 пласта оставляет узкую пачку угля (в пласте), которая вследствие работы резания самопроизвольно отсоединяется от кровли пласта. В отношении этого на фиг.2 нанесена установленная высота 33 реза. Получается, что в этом случае высота 36 щита установлена большей, чем высота 33 реза, так что нужно исходить из свободного от столкновений прохода очистного комбайна 22 с барабанным исполнительным органом под остовами 10 щитовой крепи.
Для того чтобы, исходя из фиг.2, пояснить возможное различное поведение забойного оборудования при добычной эксплуатации, на фигурах 3А и 3Б показаны условия, которые получаются, если очистной комбайн 22 с барабанным исполнительным органом имеет восходящий наклон относительно остова 10 щитовой крепи (фиг.3А), который выражается в образовании угла 37 разности между опорным полозом 11 и верхним барабаном 24 очистного комбайна 22 с барабанным исполнительным органом. Видно, что в таком случае опасность столкновения между очистным комбайном 22 с барабанным исполнительным органом и остовами 10 щитовой крепи возрастает, и этот риск можно учитывать посредством изменения высоты реза. Соответствующее относится к показанной на фиг.3б ситуации, в которой очистной комбайн 22 с барабанным исполнительным органом имеет нисходящий наклон. Также и здесь возникает соответствующий угол 37 разности, который является определяемым по зарегистрированным датчиками 17 или же 25 и 21 наклона положениями очистного комбайна 22 с барабанным исполнительным органом и остова 10 щитовой крепи, и в каждом случае возникающие углы 37 разности должны соответственно учитываться при управлении забоем.
Дополнительно, на фигурах 4А-4В представлены условия, которые возникают при проездах впадин или переездах через седловины в пласте. Как, прежде всего, вытекает из сравнения фигуры 4Б с фигурой 4А, наезд на впадину (фигура 4Б) приводит к наклонному положению забойного конвейера 20 и очистного комбайна 22 с барабанным исполнительным органом, которое является регистрируемым с помощью установленного на нем датчика 21 или же 25 наклона. Полученным здесь величинам наклона могут быть противопоставлены полученные на остове 10 щитовой крепи величины наклона, и из этого получается угол разности, который может быть соотнесен с соответственной опорной поверхностью остова 10 щитовой крепи и забойного конвейера 20 с добычной машиной 22 на почве 31 пласта. При показанном на фиг.4Б проезде впадины получается угол разности меньше 180 градусов, а это приводит к тому, что все еще имеющееся на фиг.4А расстояние между концом перекрытия 13 кровли пласта со стороны угольного забоя и очистным комбайном 22 с барабанным исполнительным органом уменьшается. Для того чтобы исключить связанный с этим риск столкновения, может быть предусмотрено, что в такой ситуации остов 10 щитовой крепи подтягивается не на полную величину, а несколько отстает от забойного конвейера 20 с очистным комбайном 22 с барабанным исполнительным органом для того, чтобы выдерживалось проходное расстояние.
Обратная ситуация получается при переезде через седловину, как она показана на фиг.4В в сравнении с фиг.4А. При этом получается угол разности больше 180 градусов, что означает, что в области кровли пласта расстояние между перекрытием 13 кровли пласта и очистным комбайном 22 с барабанным исполнительным органом разрывается. Для предотвращения неблагоприятной рабочей ситуации предусмотрено, что в автоматическом режиме остов 10 щитовой крепи передвигается вперед на полный шаг, но глубина реза очистного комбайна 22 с барабанным исполнительным органом уменьшается.
Поскольку выше соответственно описано вовлечение установленной высоты щита в управление, следует указать на то, что уже установки одного датчика наклона на перекрытии 13 кровли пласта остовов 10 щитовой крепи может быть достаточно для того, чтобы соответственно устанавливать угол прохождения кровли пласта в направлении разработки и/или в направлении очистной выемки очистного комбайна 22 с барабанным исполнительным органом, если уже знание прохождения горизонта 30 кровли пласта и его использование в качестве задающей величины для работы резания является достаточным.
На фигурах 5 и 6А, Б показано вовлечение техники управления, при которой в начале добычи очистной комбайн 22 с барабанным исполнительным органом выполняет так называемый обучающий ход, при котором барабан 23 у кровли пласта и барабан 24 у почвы пласта соответственно направляются вручную вдоль соответствующего горизонта 30 кровли пласта или же горизонта почвы пласта. Полученный таким образом профиль откладывается в качестве профиля реза и повторяется при последующих добычных ходах. Как, к тому же, следует из фиг.5, очистной комбайн 22 с барабанным исполнительным органом с барабанами 23 и 24 перемещается в направлении (стрелка 38) движения, при этом барабаны 23, 24 движутся соответственно на горизонте 30 кровли пласта и горизонте 31 почвы пласта. При этом линии 39 показывают профиль реза, который сохранен в памяти для последующих добычных ходов.
Как можно понять по упрощенному изображению на фигурах 6А, Б, сохранение показанного на фиг.6А линиями 39 профиля реза при смещении волнистого залегания вправо согласно фиг.6Б приводит к тому, что повторяемый без изменений профиль реза и прохождение горизонта 32 пласта расходятся. Хорошо видно, что при таком образе передвижения очистного комбайна 22 с барабанным исполнительным органом доля срезаемой вместе с углем пустой породы значительно возрастает, при этом доля оставленной под кровлей пачки угля увеличивается. При этом смещение волнистого залегания в горизонте 32 пласта обнаруживается посредством не показанной здесь регистрации наклона положения остовов 10 щитовой крепи, которые следуют, прежде всего, прохождению горизонта 30 кровли пласта в качестве задающей величины, так что с этими величинами отличие между фактическим прохождением пласта и установленным профилем реза становится отчетливым и может быть соответственно скорректировано.
Как далее не показано, дополнительно к определению высоты забоя и, тем самым, определению прохождения горизонта кровли пласта, как описано в связи с фигурами 1-4, предусмотрено определять фактическое прохождение горизонта кровли пласта посредством того, что с помощью установленной на очистном комбайне 22 с барабанным исполнительным органом и направленной на угольный забой инфракрасной камеры определяется положение внедренных в горизонт пласта породных прослойков и на основе присущего пласту, известного положения породного прослойка относительно горизонта кровли пласта делается заключение о прохождении горизонта кровли пласта в направлении очистной выемки. Таким образом является возможной проверка и, при необходимости, коррекция полученного из определения высоты забоя знания о прохождении горизонта кровли пласта. Альтернативная возможность заключается в том, что с помощью установленного на машинном корпусе очистного комбайна с барабанным исполнительным органом между его барабанами и направленного на угольный забой радиолокационного датчика во время добычного хода определяется прохождение горизонта кровли пласта в направлении очистной выемки, так что и таким образом может быть установлено фактическое прохождение горизонта кровли пласта и, при необходимости, привлечено в качестве величины коррекции.
Применение радиолокационной техники для определения высоты забоя также является возможным в соответствии с описанным далее на фигурах 7 и 8 примером осуществления.
Как в этой связи следует, прежде всего, из фиг.7, существующий между кровлей 30 пласта и почвой 31 пласта горизонт 32 пласта разрабатывается с помощью очистного комбайна 22 с барабанным исполнительным органом, который имеет удерживаемые посредством кронштейнов 40 на машинном корпусе 41 режущие барабаны 23 и 24. При обозначенном стрелкой 38 направлении движения очистного комбайна 22 с барабанным исполнительным органом вдоль горизонта 32 пласта режущий барабан 23 работает как режущий на горизонте 30 кровли пласта опережающий режущий барабан, в то время как режущий на горизонте 31 почвы пласта режущий барабан 24 работает как отстающий режущий барабан. Область кровли пласта горизонта 32 пласта подпирается направленными перпендикулярно направлению 38 движения очистного комбайна 22 с барабанным исполнительным органом остовами щитовой крепи, от которых на фиг.7 видны только перекрытия 13 кровли пласта.
Для того чтобы измерить проходную высоту между верхним краем машинного корпуса 41 и нижней стороной соответственно подводящего опору при добычной работе перекрытия 13 кровли пласта соответствующей остова щитовой крепи, на машинном корпусе 41 расположены два радиолокационного датчика 42, которые заподлицо заделаны в поверхность машинного корпуса 41. Радиолокационные датчики 42 посылают вертикально вверх в направлении перекрытий 13 кровли пласта сигналы и снова принимают отраженные сигналы, так что расстояние между перекрытиями 11 кровли пласта и машинным корпусом 14 может быть определено простым образом, а именно, еще заблаговременно во время добычного хода очистного комбайна 22 с барабанным исполнительным органом. В представленном пример осуществления оба радиолокационного датчика 42 расположены соответственно на переднем и заднем конце машинного корпуса 41 и заподлицо заделаны в поверхность машинного корпуса 41. Как далее не показано, могут быть предусмотрены соответствующие чистящие устройства в виде механических скребков или устройств для промывки водой под высоким давлением.
Как далее следует из фиг.7, обозначенная стрелкой 43 мощность горизонта 32 пласта меньше, чем обозначенная стрелкой 44 минимальная проходная высота забойного оборудования, так что получения или же сохранения минимальной проходной высоты 20 отстающий режущий барабан 24 соответственно выполняет врез 35 в почву пласта.
Если известна определенная посредством применения радиолокационных датчиков 42 проходная высота 45 (фигура 8) между перекрытиями 13 кровли пласта и машинным корпусом 41, то из нее простым образом определяется и фактическая высота призабойного пространства, так как расстояние между верхним краем машинного корпуса 41 и горизонтом 31 почвы пласта задано фиксированной величиной состоящей из расположенного на горизонте почвы пласта забойного конвейера 20 и движущегося на нем очистного комбайна 22 с барабанным исполнительным органом стальной конструкцией.
Как далее показано на фиг.8, во время добычной работы с помощью радиолокационных датчиков 42 определяется обозначенная стрелкой 45 проходная высота между перекрытием 13 кровли пласта и машинным корпусом 41, из которой является определяемой существующая между кровлей 30 пласта и почвой 31 пласта фактическая высота призабойного пространства. На фиг.8 видно, что эта фактическая высота призабойного пространства меньше, чем минимальная проходная высота 44 забойного оборудования, так что отстающий режущий барабан 24 при каждом добычном ходе должен выполнять соответственно один дополнительный врез в почву пласта для того, чтобы постепенно увеличивать в общем свободно вырезанную высоту призабойного пространства. Так как без каких-либо задержек во времени определяется фактически свободно вырезанная высота призабойного пространства при каждом добычном ходе очистного комбайна 22 с барабанным исполнительным органом, одновременно учитывается и краткосрочный обусловленный конвергенцией подъем почвы 31 пласта, так как в каждом случае существует нацеленность на фактически свободно вырезанную высоту забоя в свету.
Раскрытые в вышеизложенном описании, формуле изобретения, реферате и чертеже признаки предмета этих документов могут быть по отдельности и в любых комбинациях друг с другом существенными для осуществления изобретения в различных формах его осуществления.
Изобретение относится к горному делу, в частности к регулировке направления действия очистного комплекса в призабойном пространстве лавы. Предложен способ автоматического получения заданного призабойного пространства в действующих очистных забоях в подземной разработке месторождений каменного угля, в котором посредством установленных, по меньшей мере, на трех из четырех основных конструктивных деталях остова щитовой крепи, датчиков наклона определяют наклон деталей щита относительно горизонтали и в блоке вычислительной машины рассчитывают соответствующую пласту высоту щита остова крепи. Кроме того, осуществляют регистрацию пути шагового перемещения каждого остова щитовой крепи и определяют глубину реза очистного комбайна с барабанным исполнительным органом при каждом добычном ходе. А также, посредством установленных на очистном комбайне датчиков, регистрируют высоту реза очистного комбайна. За счет вычисленной на основе полученных данных геометрии забойного пространства на каждом остове щитовой крепи устанавливают угол прохождения кровли пласта и установку высоты реза очистного комбайна с барабанным исполнительным органом направляют на соответствующий угол прохождения кровли пласта для получения заданного призабойного пространства. Техническим результатом является автоматизация добычных и крепежных работ в отношении заданного призабойного пространства. 19 з.п. ф-лы, 10 ил.
1. Способ автоматического получения заданного призабойного пространства в имеющих забойный конвейер (20), очистной комбайн (22) с барабанным исполнительным органом в качестве добычной машины, а также гидравлическую щитовую крепь действующих очистных забоях в подземной разработке месторождений каменного угля, в котором посредством по меньшей мере одного установленного на перекрытии (13) кровли пласта остовов (10) щитовой крепи датчика (17) наклона определяют наклон перекрытия (13) кровли пласта относительно горизонтали в направлении разработки и/или в направлении очистной выемки очистного комбайна (22) с барабанным исполнительным органом, и из определенных таким образом углов прохождения кровли пласта на остовах (10) щитовой крепи в блоке вычислительной машины устанавливают прохождение горизонта (30) кровли пласта, и в котором за счет регистрации пути шагового перемещения каждого остова (10) щитовой крепи посредством расположенного на опорном полозе (11) остова (10) щитовой крепи измерительного устройства (19) пути определяют глубину реза очистного комбайна (22) с барабанным исполнительным органом при каждом добычном ходе, и в котором, кроме того, посредством установленных на очистном комбайне (22) с барабанным исполнительным органом датчиков (27) регистрируют высоту реза очистного комбайна (22) с барабанным исполнительным органом, при этом установку высоты реза очистного комбайна (22) с барабанным исполнительным органом направляют на соответствующий угол прохождения кровли пласта для получения заданного призабойного пространства.
2. Способ по п.1, в котором посредством установленных по меньшей мере на трех из четырех основных конструктивных деталях каждого остова (10) щитовой крепи, таких как опорный полоз (11), завальный щит (14), опорные направляющие рычаги (16) и перекрытие (13) кровли пласта, датчиков (17) наклона определяют наклон перекрытия (13) кровли пласта относительно горизонтали, и из измеренных данных в блоке вычислительной машины посредством сравнения с хранимыми в нем задающими геометрическую ориентацию конструктивных деталей и их движение во время шагового перемещения основными данными определяют в каждом случае соответствующую пласту высоту щита в области между перекрытием (13) кровли пласта и опорным полозом (11), и из этого с учетом конструктивной высоты перекрытия (13) кровли пласта и опорного полоза (11) устанавливают соответствующую пласту высоту свободно вырезанного очистным комбайном (22) с барабанным исполнительным органом забойного пространства, и в котором на основе полученных данных определяют геометрию свободно вырезанного забойного пространства на каждом остове (10) щитовой крепи.
3. Способ по п.1 или 2, в котором высоты реза выполняющего рез на кровле пласта опережающего барабана (22) у кровли пласта и выполняющего рез на почве пласта отстающего барабана (24) у почвы пласта определяют на основе регистрирующих положение кронштейнов (40) барабанов датчиков, и при прохождении очистного комбайна (22) с барабанным исполнительным органом мимо каждого остова (10) щитовой крепи общую высоту реза приводят в соотношение с определенным с помощью вычислительной машины на соответствующем остове (10) щитовой крепи размером призабойного пространства.
4. Способ по п.1 или 2, в котором наклон забойного конвейера (20) и/или очистного комбайна (22) с барабанным исполнительным органом относительно горизонтали в направлении шагового перемещения остовов (10) щитовой крепи определяют посредством установленных на забойном конвейере (20) и/или очистном комбайне (22) с барабанным исполнительным органом датчиков наклона.
5. Способ по п.4, в котором угол наклона забойного конвейера (20) и/или очистного комбайна (22) с барабанным исполнительным органом приводят в соотношение с установленным на опорном полозе (11) остова (10) щитовой крепи и/или на перекрытии (13) кровли пласта углом наклона, и образованный из этого угол разности вовлекается в расчет получающегося при нескольких следующих один за другим добычных ходах очистного комбайна с барабанным исполнительным органом призабойного пространства.
6. Способ по п.1, в котором при снижении величины для высоты реза очистного комбайна (22) с барабанным исполнительным органом ниже высоты щита определяют начавшуюся конвергенцию, и компенсируют конвергенцию за счет адаптации высоты реза.
7. Способ по п.2, в котором за счет определения наклона перекрытия (13) кровли пласта остовов (10) щитовой крепи в направлении разработки устанавливают прохождение впадин и/или седловин в направлении разработки, и за счет установленных изменений наклона перекрытия (13) кровли пласта в течение заданного периода времени предварительно рассчитывают изменение призабойного пространства и соответственно регулируют управление работой резания очистного комбайна (22) с барабанным исполнительным органом.
8. Способ по п.2, в котором за счет определения наклона отдельных остовов (10) щитовой крепи поперек направления разработки устанавливают прохождение впадин и/или седловин в направлении очистной выемки очистного комбайна (22) с барабанным исполнительным органом, и положением барабанов (23, 24) очистного комбайна (22) с барабанным исполнительным органом в забойном пространстве управляют таким образом, что барабаны (23, 24) следуют установленному прохождению впадин или седловин.
9. Способ по п.1, в котором перед началом добычной работы и/или во время добычи при изменяющемся прохождении пласта выполняют управляемый вручную обучающий ход очистного комбайна (22) с барабанным исполнительным органом с ручным направлением барабанов на горизонте (30) кровли пласта и к горизонту (31) почвы пласта, и профиль реза обучающего хода регистрируют и вводят в память блока вычислительной машины таким образом, что очистной комбайн (22) с барабанным исполнительным органом при следующих за обучающим ходом добычных ходах автоматически выполняет введенный в память профиль реза.
10. Способ по п.9, в котором при обучающем ходе очистного комбайна (22) с барабанным исполнительным органом определяют угол продольного наклона и/или угол поперечного наклона барабанов (23, 24) очистного комбайна (22) с барабанным исполнительным органом относительно вертикали и привлекают при установлении подлежащего повторению профиля реза, при этом сглаживают возникающие при последующих добычных ходах угловые отклонения.
11. Способ по п.1 или 2, в котором на основе данных установленной на очистном комбайне (22) с барабанным исполнительным органом и направленной на угольный забой инфракрасной камеры устанавливают положение внедренных в пласт породных прослойков, и на основе присущего пласту известного положения породного прослойка относительно горизонта (30) кровли пласта определяют во время добычного хода прохождение горизонта (30) кровли пласта в направлении очистной выемки, и по этому ориентируют положение опережающего барабана (23) у кровли пласта при последующем добычном ходе очистного комбайна (22) с барабанным исполнительным органом, и при этом положение отстающего барабана (24) у почвы пласта устанавливают с допущением остающейся одинаковой мощности пласта.
12. Способ по п.1 или 2, в котором определенное из установленных углов прохождения кровли пласта в области остовов (10) щитовой крепи прохождение кровли пласта сравнивают с заданным посредством обучающего хода и/или на основе определения положения породного прослойка профилем реза очистного комбайна (22) с барабанным исполнительным органом, и при устанавливаемом с помощью вычислительной машины врезе очистного комбайна (22) с барабанным исполнительным органом в кровлю пласта проводят коррекцию направления реза опережающего барабана (23) у кровли пласта для адаптации к прохождению кровли (30) пласта.
13. Способ по п.12, в котором проводят адаптацию направления реза отстающего барабана (24) у почвы пласта к коррекции направления реза опережающего барабана (23) у кровли пласта для получения заданного призабойного пространства.
14. Способ по п.1 или 2, в котором посредством установленного на машинном корпусе (41) очистного комбайна (22) с барабанным исполнительным органом между его барабанами (23, 24) и направленного на угольный забой радиолокационного датчика во время добычного хода определяют прохождение горизонта (30) кровли пласта в направлении очистной выемки и сравнивают с выведенным из углов прохождения кровли пласта прохождением горизонта кровли пласта, и при необходимости проводят коррекцию высоты реза барабанов (23, 24) очистного комбайна (22) с барабанным исполнительным органом.
15. Способ по п.14, в котором посредством радиолокационного датчика дополнительно определяют прохождение горизонта (31) почвы пласта в направлении очистной выемки очистного комбайна (22) с барабанным исполнительным органом, устанавливают и при необходимости корректируют положение отстающего барабана (24) у почвы пласта относительно положения горизонта (31) почвы пласта.
16. Способ по п.1 или 2, в котором посредством установленных на барабанах (23, 24) пригодных для проведения инерциальной навигации датчиков соответствующее положение барабана в забойном пространстве постоянно регистрируют в виде пространственных координат, и при расположении в ряд зарегистрированных во время добычного хода пространственных координат моделируют соответственно свободно вырезанный барабанами (23, 24) добычный канал в трехмерном пространстве и сравнивают с рассчитанной с привлечением положения остовов (10) щитовой крепи геометрией забойного пространства.
17. Способ по п.16, в котором за счет расположения в ряд смоделированных для нескольких следующих один за другим добычных ходов добычных каналов в трехмерном пространстве создают модель для прохождения горизонта (32) пласта в направлении разработки и сравнивают с моделью прохождения горизонта пласта, рассчитанной на основе забойных пространств, соответственно рассчитанных по своей геометрии для серии из нескольких добычных ходов.
18. Способ по п.1 или 2, в котором посредством по меньшей мере одного установленного на машинном корпусе (41) очистного комбайна (22) с барабанным исполнительным органом радиолокационного датчика (42) измеряют расстояние между верхним краем машинного корпуса (41) и нижней стороной подводящего опору при добычной работе перекрытия (13) кровли пласта остова (10) щитовой крепи, и в качестве фактической величины для проходной высоты очистного комбайна (22) с барабанным исполнительным органом под остовами (10) щитовой крепи вводят в блок вычислительной машины и сравнивают там с хранимой в памяти заданной величиной, при этом при установленном отклонении формируют управляющие команды для адаптации высоты реза по меньшей мере одного из обоих барабанов очистного комбайна с барабанным исполнительным органом.
19. Способ по п.18, в котором из полученных на остовах (10) щитовой крепи данных рассчитывают в каждом случае соответствующую пласту высоту каждого остова (10) щитовой крепи на переднем конце перекрытия (13) кровли пласта в качестве меры для фактического призабойного пространства, и определенные таким образом фактические величины расчета высоты щита подают на обрабатывающий фактические величины из измерения проходной высоты блок вычислительной машины.
20. Способ по п.18, в котором дополнительно установленные при следующих один за другим добычных ходах за счет соответственно сформированных управляющих команд величины коррекции для высоты реза барабанов (23, 24) сравнивают между собой, и определенную из величин коррекции суммарную величину привлекают в качестве меры для начавшейся конвергенции, которую при будущих добычных ходах учитывают при определении необходимой адаптации высоты реза барабанов (23, 24).
| Способ управления очистным комплексом | 1988 |
|
SU1523661A1 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| US 4634186 A1, 06.01.1987 | |||
| Способ управления механизированным комплексом в профильной плоскости пласта в направлении движения | 1978 |
|
SU775334A1 |
| Способ управления перемещением базы механизированной крепи | 1980 |
|
SU877059A1 |
| Способ оценки эффективности лечения хронического катарального гингивита у детей | 2019 |
|
RU2714506C1 |
| US 5423638 A1, 13.06.1995 | |||
| DE 102007060170 A1, 03.07.2008. | |||

