Область применения
Предложенная группа изобретений относится к технологиям высокоточного позиционирования транспортных средств (ВТП ТС) по сигналам глобальных навигационных спутниковых систем (ГНСС).
Основной технологией позиционирования на сегодняшний день является спутниковая - получение кодовых сигналов с различных спутников для вычисления местоположения приемника. Технология изначально разрабатывалась для военных нужд, однако уже достаточно давно открыта и для гражданского применения. Но поскольку навигационная информация может быть использована, в частности, для разведывательных нужд, точность гражданских решений нередко искусственно огрубляется, причем иногда на уровне программного обеспечения самих приемников. Тем не менее точность кодового метода позиционирования составляет от 5 до 15 м, а этого недостаточно для задач позиционирования наземного пассажирского транспорта. Кроме того, спутниковая навигация хорошо работает там, где видно небо. На точность навигации могут повлиять горы, большие озера и различные источники сильных электромагнитных помех. Для повышения точности определения местоположения приходится использовать различные методы, например дифференциальную коррекцию положения по отношению к неподвижным объектам.
Следует отметить, что неподвижные приемники спутникового сигнала можно позиционировать достаточно точно даже с помощью кодового метода вычисления координат - за счет длительного накопления данных со спутника. Чем больше сигналов анализируется, тем точнее определяется местоположение неподвижных объектов. Для уточнения можно использовать различные системы - GPS, ГЛОНАСС, BeiDou и др. Их сигналы можно принимать на любой территории независимо от страны нахождения устройства. Эти неподвижные объекты в дальнейшем используются уже для вычисления положения мобильных приемников путем анализа разности фаз спутниковых сигналов. Базовая станция позволяет определить погрешность, которую вносит в распространение сигнала атмосфера Земли. Такой метод позиционирования позволяет определять положение не только по кодовым сигналам, но и по фазе сигнала. Для этого нужно получить корректирующую информацию от неподвижных источников через какой-нибудь канал коммуникаций. Метод называется фазовым - он требует наличия неподвижных источников корректирующих сигналов, которые используются для быстрого и высокоточного позиционирования подвижных объектов.
Фазовый метод позволяет добиться сантиметровой точности позиционирования, что вполне приемлемо для задач позиционирования наземного пассажирского транспорта: дальнейшее уточнение позиции можно ввести с помощью машинного зрения. Понятно, что чем ближе к станции коррекции располагается приемник, тем точнее можно определить его местоположение с помощью фазового метода. Однако следует помнить, что точность определения высоты несколько ниже, чем наземных (плановых) координат, примерно в два раза.
Чтобы обеспечить высокоточное позиционирование в больших масштабах, например города, необходимо устанавливать достаточно много дополнительных станций, передающих корректирующие сигналы.
Для высокоточной навигации в помещениях применяются аналогичные технологии (привязка к неподвижным передающим станциям), но при этом можно уже не использовать исходный сигнал спутников, а отсчитывать расстояние от локальных базовых станций: их координаты должны быть известны с высокой точностью. Такие решения можно применять в том случае, когда на одной части объекта небо видно, а на другой - нет. Тогда достаточно установить специальные датчики, которые позволяют в радиусе 100 м добиваться сантиметровой точности, эмулируя при этом работу системы GPS. Впрочем, для локальной системы позиционирования можно еще увеличить точность позиционирования в зависимости от используемых частот и количества датчиков. Однако при этом возрастает стоимость решения, поскольку в нее включается стоимость и приемников, и установленных передатчиков. В результате решение со специализированными передатчиками корректирующего сигнала оказывается достаточно дорогим.
Для целей навигации можно использовать и стандартные базовые станции мобильной связи или Wi-Fi. Можно применять технологии RFID и аналогичные персональные радиотехнологии: комплексные системы позволяют выполнять сложные задачи, и сейчас многие стартапы стараются разработать решение, объединяющее как можно больше популярных методов позиционирования. Конечно, для них необходимо разрабатывать специализированное программное обеспечение, но аппаратные компоненты таких устройств стандартные. Со временем должна возникнуть единая система, объединяющая самые разнообразные методы и устройства, позволяющая позиционировать устройства непрерывно, независимо от расположения приемника. Дело за созданием аппаратных и программных решений.
Уровень техники
Известен способ высокоточного позиционирования для гражданских потребителей путем развертывания локальных дифференциальных подсистем, которые имеют радиус зоны действия не более 200 км, и, как правило, включают одну контрольно-корректирующую станцию, вырабатывающую дифференциальные поправки и данные о целостности, и средства передачи данных, в качестве которых используются средства УКВ-радиосвязи (Ю.А. Соловьев. Спутниковая навигация и ее приложения, М., Эко-тренд, 2003, с. 51, с. 85).
Недостатком известного способа является недостаточная точность позиционирования 1-3 м в динамическом режиме, необходимость развертывания сети корректирующих станций, наличие «мертвых зон» приема.
Известен способ высокоточного позиционирования, реализованный высокоточной координатной системой, включающей дифференциальную подсистему геодезической навигационной спутниковой системы, высокоточную реперную систему и координатную модель железнодорожного пути (И.Н. Розенберг, В.Я. Цветков, С.И. Матвеев, С.К. Дулин, Научно-техническое издание «Интегрированная система управления железной дорогой» под ред. В.И. Якунин, М.: Дизайн, Информация, Картография, 2008, с. 87-94).
В известном способе все координатные расчеты осуществляют в глобальной геоцентрической системе координат. Эта система не имеет картографических искажений, присущих обычным и цифровым картам. Она позволяет реализовать принцип единства измерений. Система оснащена также средствами пересчета координат в государственную систему координат СК-95 в форме прямоугольных, эллипсоидных и плоских координат в проекции Гаусса-Крюгера и в специальной геодезической проекции, не имеющей практически значимых картографических искажений.
Основным недостатком известной технологии является недостаточно высокая точность определения позиционирования местоположения ТС.
Из патента RU 2690521 С1, опубл. 04.06.2019, известна технология дистанционного мониторинга позиционирования транспортных средств при отсутствии на борту транспортного средства навигационного вычислителя, в том числе при уменьшении числа видимых навигационных спутников до двух.
Основным недостатком известной технологии является недостаточно высокая точность определения позиционирования местоположения ТС.
Из патента RU 2657185 С1, опубл. 08.06.2018, известна система локального позиционирования содержит ведущий узел, по меньшей мере два подчиненных узла, по меньшей мере одну метку, имеющую свои идентификационные данные. Способ работы системы локального позиционирования содержит этапы, на которых ведущий узел получает команду от пользователя на поиск метки; ведущий узел и подчиненные узлы посылают поисковые импульсы, модулированные идентификационными данными метки; метка принимает поисковый импульс, накапливает энергию принятого поискового импульса и отправляет в пространство позиционирующий импульс при определении совпадения принятых идентификационных данных с ее идентификационными данными; ведущий узел рассчитывает положение метки в пространстве по принятым позиционирующим импульсам.
Основным недостатком известной технологии является недостаточно высокая точность определения позиционирования местоположения ТС.
Из заявки US 2008/0165053 А1, опубл. 10.07.2008, известна технология обработки данных от приемников ГНСС. Описаны механизм постобработки и предиктор точности постобработки. Механизм постобработки обеспечивает высокоточное определение положения GNSS (GPS) с коротким временем работы для ГИС-приложений. Предсказатель точности постобработки вычисляет во время сбора данных оценку точности, которая может быть достигнута после постобработки. Это помогает оптимизировать производительность при сборе данных GNSS, для которых важна точность постобработки. Предсказатель исследует качество измерений несущей и оценивает, насколько хорошо решение с плавающей запятой после обработки будет сходиться за время, прошедшее с момента получения блокировки несущей.
Основным недостатком известной технологии является недостаточно высокая точность определения позиционирования местоположения ТС.
Предложенное изобретение направлено на устранение недостатков предшествующего уровня техники.
Раскрытие изобретения
Основными отличительными особенностями предложенной технологии, являются:
• Определение высокоточных координат местоположения транспортных средств (ТС), осуществляющих городские пассажирские перевозки: автобусы, троллейбусы, трамваи, электробусы;
• Обеспечение интеграции заявленной технологии с верхнеуровневыми системами посредством использования унифицированного транспортного протокола EGTS (Era Glonass Telematics Standard), что минимизирует трудозатраты на такую интеграцию;
• Вычисление дифференциальной RTK (Real Time Kinematic) поправки посредством навигационного чипа базовой станции высокоточного позиционирования БС ВТП, определяющей ошибку местоположения при текущем расположении спутников над ТС, при этом RTK поправка транслируется на ТС по двум дублирующим друг друга каналам: LTE канал и/или UHF (Ultra High Frequency) радиоканал;
• Обеспечение трансляции данных местоположения транспортного средства на серверный модуль и/или в диспетчерский центр;
• Обеспечение точности позиционирования ТС до 1,5 м на расстоянии до 20 км от места расположения БС ВТП;
• Обеспечения контроля скоростного режима и направления движения ТС.
Предложенная технология направлена на достижение следующих технических результатов:
• Расширение функциональных возможностей высокоточного позиционирования (ВТП) ТС;
• Расширение функциональных возможностей сложных систем диспетчерского управления, требующих актуальной информации о точном местоположении ТС;
• Повышение точности позиционирования ТС за счет учета, при определении местоположения ТС, дифференциальной RTK поправки, принимаемой от БС ВТП по двум каналам: LTE и UHF.
Указанные технические результаты достигаются за счет предложенного программно-аппаратного комплекса высокоточного позиционирования транспортного средства (ТС) с использованием сигналов глобальных навигационных спутниковых систем (ГНСС), содержащего, по меньшей мере, следующее:
- базовую станцию высокоточного позиционирования (БС ВТП), размещенную стационарно, в предварительно геопривязанном месте, выполненную с возможностью приема сигналов навигации ГНСС, посредством обмена данными со спутниками, вычисления дифференциальной RTK (Real Time Kinematic) поправки посредством навигационного чипа БС ВТП, определяющей ошибку местоположения при текущем расположении спутников над ТС, при этом RTK поправка транслируется на ТС по двум дублирующим друг друга каналам: LTE канал и UHF (Ultra High Frequency) радиоканал;
- транспортный терминал высокоточного позиционирования (ТТ ВТП), размещенный на ТС, содержащий, по меньшей мере: модуль высокоточного позиционирования (ВТП) и, подключенные к модулю ВТП, - антенну ГНСС и антенну UHF, при этом терминал ТС выполнен с возможностью приема RTK поправки по дублирующим друг друга каналу каналам UHF и LTE для уточнения собственного местоположения по данной поправке, а также с возможностью транслирования данных местоположения на серверный модуль по протоколу EGTS (Era Glonass Telematics Standard) с частотой до 3 раз в секунду;
при этом ТТ ВТП также выполнен с возможностью одновременного приема модулем ВТП сигналов ГНСС в двух частотных диапазонах: L1 (1559-1606 МГц) и L2 (1197-1249 МГц);
- серверный модуль, установленный стационарно, содержащий, по меньшей мере: LTE модем, выполненный с возможностью приема данных местоположения ТС; сервер позиционирования, выполненный с возможностью сохранения данных местоположения ТС в базе данных, а также транслирования данных местоположении ТС по протоколу EGTS в верхнеуровневые системы, посредством каналов передачи данных сервера позиционирования.
ТС являются транспортные средства, осуществляющие городские пассажирские перевозки: автобусы, троллейбусы, трамваи, электробусы.
При этом высокоточное позиционирование ТС производится на территориях автобусных, трамвайных, троллейбусных парков и прилегающих территориях.
При данном варианте реализации, точность позиционирования ТС составляет до 1,5 м и обеспечивается на расстоянии до 20 км от места расположения БС ВТП, далее точность будет снижаться.
Также, при данном варианте реализации, обеспечивается контроль скоростного режима и направления движения ТС.
Также обеспечивается возможность трансляции по унифицированному транспортному протоколу EGTS высокоточных навигационных данных о местоположении ТС в верхнеуровневые системы, осуществляющие мониторинг, контроль и управление ТС и объектами транспортной инфраструктуры.
Указанные технические результаты также достигаются за счет предложенного способа высокоточного позиционирования ТС с использованием программно-аппаратного комплекса высокоточного позиционирования ТС с использованием сигналов ГНСС, содержащего, по меньшей мере, этапы, на которых осуществляют:
- прием навигационных данных от ГНСС;
- вычисление дифференциальной RTK поправки посредством навигационного чипа БС ВТП, определяющей ошибку местоположения при текущем расположении спутникового созвездия над ТС,
при этом RTK поправка транслируется на ТС по двум дублирующим друг друга каналам: LTE канал и UHF радиоканал;
- прием на ТТ ВТП RTK поправки по каналу каналам UHF и ГТЕ, где средствами встроенного ПО осуществляется уточнение вычисленных по сигналам ГНСС навигационных данных;
- трансляцию по каналу LTE данных о местоположении ТС посредством ТТ ВТП на серверный модуль с частотой до 3 раз в секунду по протоколу EGTS;
- одновременный прием модулем ВТП сигналов ГНСС в двух частотных диапазонах: L1 (1559-1606 МГц) и L2 (1197-1249 МГц);
- прием данных о местоположении ТС на серверном модуле, установленном стационарно, содержащем, по меньшей мере, LTE модем, и сервер позиционирования;
- сохранение данных о местоположении ТС в базе данных сервера позиционирования;
- трансляцию данных местоположении ТС по протоколу EGTS в верхнеуровневые системы, посредством каналов передачи данных сервера позиционирования.
ТС являются транспортные средства, осуществляющие городские пассажирские перевозки: автобусы, троллейбусы, трамваи, электробусы.
При этом высокоточное позиционирование ТС производится на территориях автобусных, трамвайных, троллейбусных парков и прилегающих территориях.
При данном варианте реализации, точность позиционирования ТС составляет до 1,5 м и обеспечивается на расстоянии до 20 км от места расположения БС ВТП, далее точность будет снижаться.
Также при данном варианте реализации обеспечивается контроль скоростного режима и направления движения ТС.
Также обеспечивается возможность трансляции по унифицированному транспортному протоколу EGTS высокоточных навигационных данных о местоположении ТС в верхнеуровневые системы, осуществляющие мониторинг, контроль и управление ТС и объектами транспортной инфраструктуры.
Краткое описание чертежей
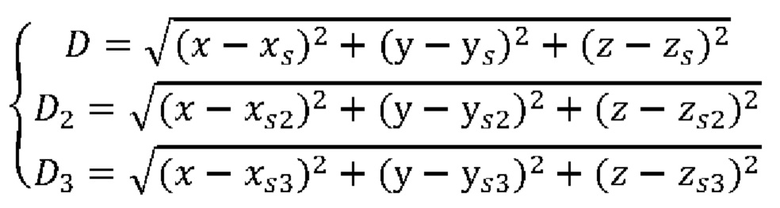
На фиг. 1 представлено функционирование программно-аппаратного комплекса высокоточного позиционирования транспортного средства (ПАК ВТП ТС).
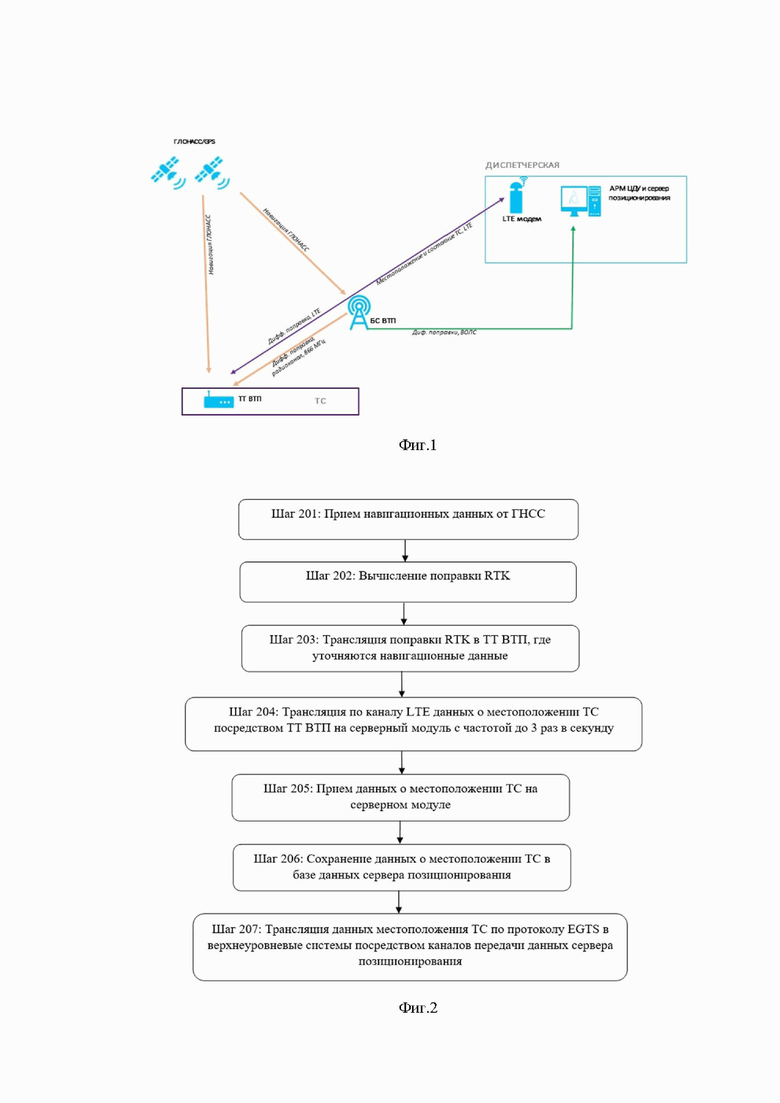
На фиг. 2 представлены этапы способа определения местоположения ТС с использованием программно-аппаратного комплекса высокоточного позиционирования ТС с использованием сигналов ГНСС.
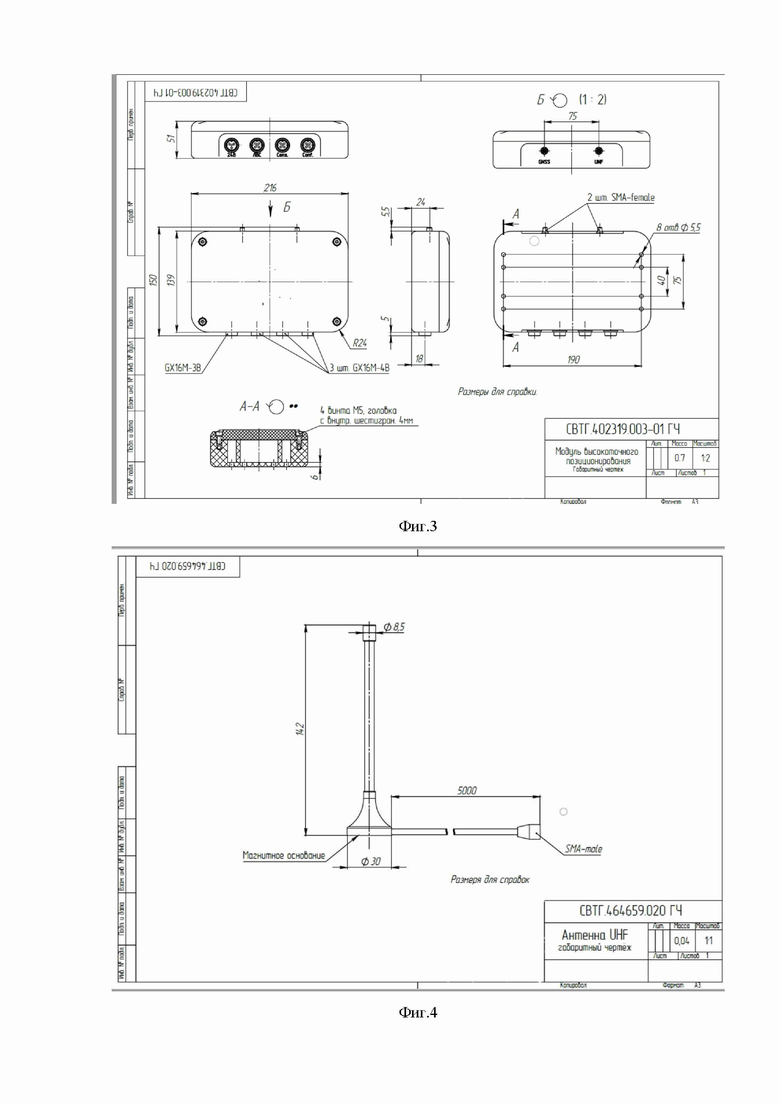
На фиг. 3 представлен пример габаритного чертежа модуля высокоточного позиционирования (ВТП).
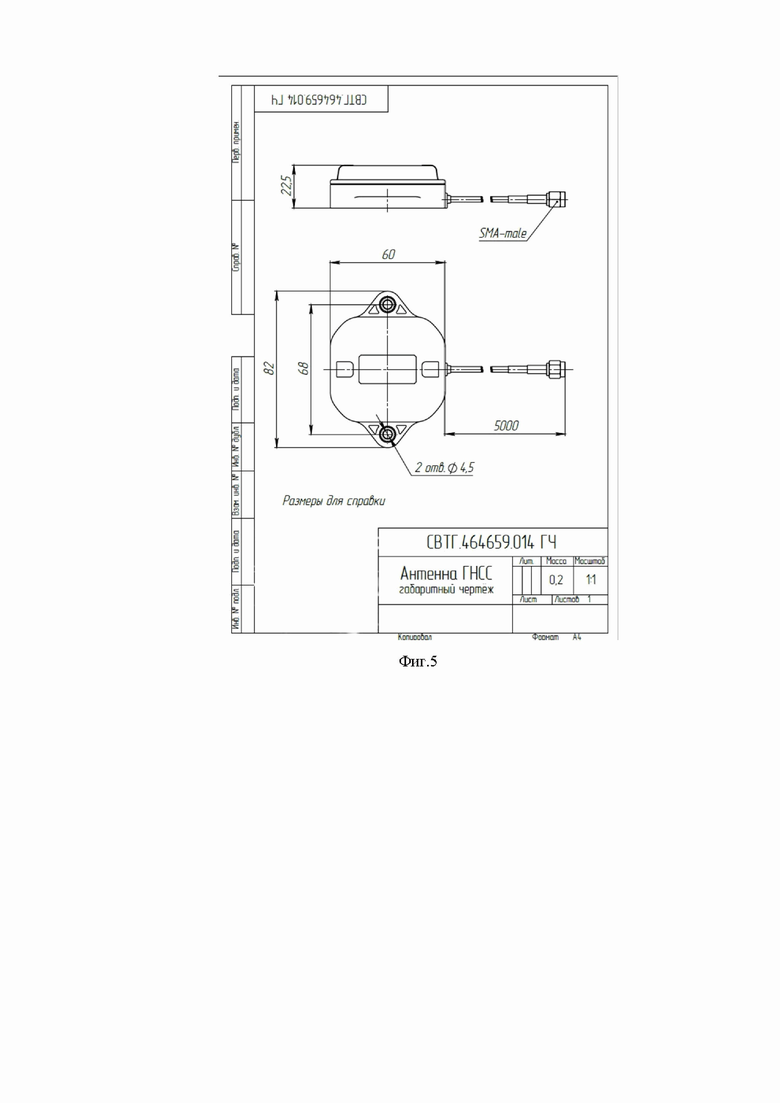
На фиг. 4 представлен пример габаритного чертежа антенны UHF.
На фиг. 5 представлен пример габаритного чертежа антенны ГНСС.
Осуществление изобретения
Далее будет подробно описана предложенная технология ВТП ТС, с приведением примеров ее реализации.
Предложенная технология раскрывает, по меньшей мере, вариант осуществления ПАК ВТП ТС, представленный на фиг. 1, а также способ определения местоположения ТС посредством ПАК ВТП ТС с использованием сигналов ГНСС, представленный на фиг. 2.
ГНСС (GNSS) расшифровывается как Global Navigation Satellite System (или Спутниковая Система Навигации) и используется как общий термин для спутниковой локализации с глобальным покрытием по всему земному шару.
Как указано на фиг. 1, в состав ПАК ВТП ТС входят, по меньшей мере:
базовая станция высокоточного позиционирования (БС ВТП), размещенная стационарно в предварительно геопривязанном месте,
транспортный терминал высокоточного позиционирования (ТТ ВТП), размещенный на ТС, содержащий, по меньшей мере: модуль высокоточного позиционирования (ВТП) и, подключенные к модулю ВТП, - антенну ГНСС и антенну UHF;
серверный модуль, установленный стационарно, содержащий, по меньшей мере: LTE модем, сервер позиционирования.
На фиг. 2 указаны основные этапы способа определения местоположения ТС с использованием ПАК ВТП ТС с использованием сигналов ГНСС.
На шаге 201, БС ВТП принимает сигналы навигации ГНСС посредством обмена данными со спутниками.
На шаге 202, БС ВТП осуществляет вычисление дифференциальной RTK (Real Time Kinematic) поправки с помощью навигационного чипа БС ВТП. RTK поправка определяет ошибку местоположения при текущем расположении спутников над ТС.
RTK поправка транслируется на ТС по двум дублирующим друг друга каналам: LTE каналу и/или UHF (Ultra High Frequency) радиоканалу.
RTK расшифровывается как «кинематика в реальном времени» и представляет собой метод, который использует измерения на основе фазы несущей и получает дальности (и, следовательно, координаты), которые на несколько порядков точнее, чем те, которые доступны при позиционировании на основе кода.
RTK используется для приложений, требующих более высокой точности, например, определения координат с сантиметровой точностью, т.е. до 1 см + 1 ppm (мм/км).
На базовом концептуальном уровне дальность вычисляется путем определения количества циклов несущей между спутником и подвижной станцией, а затем умножения этого числа на длину волны несущей.
Вычисленные диапазоны по-прежнему включают ошибки от таких источников, как спутниковые часы и эфемериды, а также ионосферные и тропосферные задержки. Чтобы устранить эти ошибки и воспользоваться преимуществами точности измерений на основе несущей, для работы RTK требуется, чтобы измерения передавались с базовой станции на станцию подвижного приемника.
Для передачи RTK поправки должен быть установлен канал передачи данных.
Передача данных может быть осуществлена несколькими способами:
• LTE канал;
• UHF радиоканал, 868 МГц
• другие внешние устройства (такие как Wi-Fi и др.), обеспечивающие TCP подключение к серверному модулю.
RTK поправка формируется на основе координат, вычисляемых в реальном времени навигационным приемником по сигналам ГНСС и априорно известными координатами места размещения БС ВТП.
На шаге 203, осуществляется трансляция RTK поправки в ТТ ВТП, где уточняются навигационные данные.
Транспортный терминал высокоточного позиционирования (ТТ ВТП) размещают на ТС. ТТ ВТП содержит, по меньшей мере: модуль высокоточного позиционирования (ВТП) и, подключенные к модулю ВТП, антенну ГНСС и антенну UHF.
Антенны UHF и ГНСС подключаются к модулю ВТП и, все вместе входят в состав ТТ ВТП.
Пример габаритного чертежа модуля ВТП, входящего в состав ТТ ВТП представлен на фиг. 3.
Пример габаритного чертежа антенны UHF показан на фиг. 4.
Пример габаритного чертежа антенны ГНСС показан на фиг. 5.
Необходимо отметить, что к модулю ВТП могут подключаться также и иные антенны, которые обеспечивают заданные технические параметры (чувствительность, КСВ, частотный диапазон, волновое сопротивление, конструктивная возможность установки на транспорте).
Конструктивное исполнение модуля ВТП и антенн может отличаться от указанного, при сохранении обеспечиваемых технических характеристик.
ТТ ВТП принимает RTK поправку по каналу UHF и/или LTE для уточнения собственного местоположения по данной поправке.
Таким образом, достигается точность позиционирования ТС до 1,5 м и обеспечивается на расстоянии до 20 км от места расположения БС ВТП.
Данные параметры соответствуют заявленным значениям в описаниях системы дифференциальной коррекции глобальных навигационных спутниковых систем (ДСК ГНСС или DGPS), и подтверждены в ходе промышленной эксплуатации ПАК ВТП ТС.
Точность позиционирования по сигналам ГНСС зависит от ряда факторов:
- взаимного расположения навигационных спутников, находящихся в прямой видимости ГНСС приемника («рабочего созвездия»). Выражается геометрическим фактором Position Dilution Of Precision (DPOP);
- отклонения ГНСС спутников от расчетных орбит;
- влияния ионосферы и тропосферы на скорость распространения радиосигналов со спутников ГНСС (зависит от множества факторов, в т.ч. от текущего уровня солнечной активности);
- качества кварцевых генераторов в ГНСС приемнике, вносящих погрешность в точность расчета времени приема ГНСС сигналов;
- наличия отраженных сигналов ГНСС (актуально в условиях плотной городской застройки и горах).
Наличие дифференциальной коррекции обеспечивает компенсацию указанных выше факторов, повышая точность позиционирования. Вместе с тем, по мере удаления от базовой станции, вычисляющей RTK поправку для собственного местоположения, изменяется и «рабочее созвездие», что влияет на актуальность RTK поправки.
Также следует отметить, что ТТ ВТП обеспечивает прием сигналов ГНСС в двух частотных диапазонах: L1 (1559-1606 МГц) и L2 (1197-1249 МГц), с последующим мультиплексированием значений, полученных по двум каналам. Двухчастотный прием позволяет снизить погрешность влияния атмосферы на базовую точность позиционирования. (В большинстве «бытовых» навигационных приемников реализован одночастотный прием).
Далее приведем пример расчета точности позиционирования, в случае отслеживания местоположения ТС - автобус, на территории конкретного автобусного парка.
В Автобусном парке №6 - филиале СПб ГУП «Пассажиравтотранс» (АП6) два транспортных средства (ТС) оборудованы ТТ ВТП. На территории АП6 установлена БС ВТП, обеспечивающая трансляцию RTK поправок.
Модуль ВТП, установленный на автобусе, осуществляет:
a) прием сигналов ГНСС ГЛОНАСС/GPS по двум каналам приема одновременно (двухчастотный прием);
b) на основе принятых сигналов вычисляется базовая координата. Упрощенно, в варианте для трех спутников, это выглядит так:
где D - расстояние ГНСС приемником и спутником (дальность),
xs, ys, zs - координаты спутника (значение вычисляется по априорно известных эфемерид спутников);
х, у, z - координаты ГНСС приемника.
c) вычислив расстояния от четырех спутников, приемник ищет точку пересечения соответствующих сфер. Если такой точки нет, контроллер приемника начинает методом последовательных приближений корректировать свои часы до тех пор, пока не добьется пересечения всех сфер в одной точке. Чем больше количество спутников, тем выше точность. Модуль ВТП обеспечивает возможность одновременного приема сигналов до 184 спутников различных навигационных систем. Обычно в городских условиях обеспечивается прием 6-14 спутников ГНСС;
d) проводится постобработка данных, обеспечивающая мультиплексирование по двум частотным диапазонам приема, а также постобработка, снижающая ошибки от интерференции (взаимодействия прямого спутникового сигнала с отраженным, например, от зданий);
e) осуществляется подключение к NTRIP-кастеру, реализованному программно на сервере позиционирования, откуда с частотой 1 Гц осуществляется прием RTK поправок;
f) проводится уточнение местоположения с учетом принятой RTK поправки, вычисляется высокоточное местоположение приемника ГНСС;
g) осуществляется подключение к серверу позиционирования и по протоколу EGTS передаются вычисленные навигационные данные.
На сервере позиционирования принятые навигационные данные журналируются и по согласованным API передаются в верхнеуровневую систему Диспетчеризации движения автобусов.
В ходе промышленной эксплуатации, точность позиционирования определяется следующим образом:
- осуществляется контроль положения ТС на местности и на карте ПО Диспетчеризации, проводится контроль того, что при неподвижном ТС, точка на карте не смещается;
- осуществляется движение ТС на 1,5 м, при этом на карте ПО Диспетчеризации визуально видно минимальное смещение ТС на указанное расстояние.
Реальная точность позиционирования, обеспечиваемая ТТ ВТП составляет порядка дециметра, однако измерить подобное расстояние на картографических программах не представляется возможным.
Также, для задач позиционирования пассажирского транспорта, не требуется точность выше 1,5 м.
На шаге 204 осуществляется транслирование данных местоположения на серверный модуль с частотой до 3 раз в секунду.
Высокоточные навигационные данные о положении ТС с частотой до 3 раз в секунду по протоколу EGTS передаются ТТ ВТП (по TCP) на серверный модуль и/или в диспетчерский центр (используя имеющиеся радиоканалы ТС -LTE или Wi-fi).
ТТ ВТП обеспечивает:
• прием сигналов глобальных навигационных систем связи (ГНСС);
• прием дифференциальных поправок от БС ВТП;
• вычисление текущих координат с повышенной точностью и отправку их на специализированный сервер позиционирования. Работа ТТ ВТП обеспечивается с помощью специального программного обеспечения (далее - СПО), функционирующего на встроенном контроллере управления.
ТТ ВТП может быть отнесена к аппаратуре радионавигационной для работы в системе спутниковой навигации ГЛОНАСС или ГЛОНАСС/GPS.
Областью применения ТТ ВТП являются все типы наземных ТС, осуществляющие пассажирские перевозки по маршрутам, по меньшей мере: автобусы, электробусы, трамваи, троллейбусы.
Электропитание ТТ ВТП осуществляется от стабилизированной бортовой сети ТС с напряжением 24 В, обеспечивается возможность электропитания по РоЕ стандарта IEEE 802.3af.
ТТ ВТП предназначен для установки в салоне ТС в месте, защищенном от прямого попадания воды, масел, воздействия агрессивной среды, прямого механического воздействия, воздействия солнечных лучей.
ТТ ВТП при номинальных условиях должна обеспечивать автоматический запуск при подаче электропитания.
ТТ ВТП должен обеспечивать:
- возможность настройки оператором начальных параметров функционирования (IP-адреса ТТ ВТП и сервера позиционирования, каналов для приема RTK поправок и отправки навигационных данных);
- непрерывный сбор, обработку навигационных данных от спутников ГНСС;
- прием дифференциальных навигационных поправок от базовых станций высокоточного позиционирования по УКВ радиоканалу и/или по TCP/IP;
- вычисление высокоточных навигационных данных, трансляцию их на сервер позиционирования по протоколу ТСР/IP, используя имеющиеся каналы передачи данных Wi-fi/LTE.
В ТТ ВТП, благодаря реализации стандартизованного протокола обмена RTK поправками (NTRIP, RTCM) с БС ВТП обеспечивается возможность работы с иными внешними БС ВТП.
В ТТ ВТП реализована возможность настройки и обновления прошивки по интерфейсу Ethernet, что облегчает ее ввод в эксплуатацию и обслуживание на ТС.
Посредством ТТ ВТП также обеспечивается определение данных о скорости и направлении движения ТС.
Данные по скорости и азимуту движения ТС вычисляются на основе математической обработки навигационных данных, вычисленных по сигналам ГНСС, в текущий и предыдущие моменты времени.
На шаге 205 осуществляется прием данных о местоположении ТС на серверном модуле.
Серверный модуль содержит, по меньшей мере: сервер позиционирования, LTE модем.
На шаге 206 осуществляется сохранение данных о местоположении ТС в базе данных сервера позиционирования.
Из такой базы данных всегда можно выгрузить информацию о местоположении ТС в разное время. Также есть возможность выгрузки информации о местоположении ТС в облачные системы для дальнейшего анализа полученной информации.
На шаге 207 осуществляется трансляция данных местоположении ТС по протоколу EGTS в верхнеуровневые системы, посредством каналов передачи данных сервера позиционирования.
Протокол EGTS позволяет осуществлять интеграцию системы с верхнеуровневыми системами, осуществляющими мониторинг, контроль и управление транспортными средствами и объектами транспортной инфраструктуры.
Как уже было указано выше, этапы предложенных технологий определения местоположения ТС могут применяться для всех типов наземных ТС, осуществляющих пассажирские перевозки по маршрутам, по меньшей мере: автобусы, электробусы, трамваи, троллейбусы.
Кроме того, высокоточное позиционирование ТС может производится на территории автотранспортного предприятия, а также на территориях автобусных, трамвайных, троллейбусных парков и прилегающих территориях.
В вышеизложенных вариантах осуществления настоящей технологии, раскрытый способ описывается с использованием блок-схем с последовательностями шагов или модулей, но настоящее изобретение не ограничено порядком следования шагов, а некоторые шаги могут выполняться одновременно с другими шагами или в другом порядке. Специалисту обычного уровня в данной области техники должно быть понятно, что шаги в блок-схемах не исключают друг друга и что в блок-схемы могут быть добавлены другие шаги или некоторые из шагов могут быть удалены из блок-схем без влияния на объем настоящего изобретения.
Кроме того, вышеизложенные варианты осуществления изобретения содержат различные аспекты примеров. Невозможно описать все возможные комбинации для представления различных аспектов, и специалистам в данной области техники должно быть понятно, что возможны и другие комбинации, кроме описанных. Соответственно, настоящее изобретение содержит все изменения, модификации и разновидности, охватываемые приведенной ниже формулой изобретения.
Таким образом, раскрытые технологии позволяют расширить функциональные возможности ВТП ТС. Кроме того, расширяются возможности сложных систем диспетчерского управления, требующих актуальной информации о точном местоположении ТС. Раскрытые технологии также обеспечивают повышение точности позиционирования ТС, за счет учета при определении местоположения ТС дифференциальной RTK поправки, принимаемой от БС ВТП по двум каналам: LTE, UHF.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННАЯ СИСТЕМА ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ | 2014 |
|
RU2572589C1 |
| СИСТЕМА ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ КОВША ЭКСКАВАТОРА ДЛЯ БЛОЧНОЙ МОДЕЛИ ГОРНОГО ПРЕДПРИЯТИЯ | 2024 |
|
RU2831442C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ПРИКЛАДНОЙ ПОТРЕБИТЕЛЬСКИЙ ЦЕНТР НАВИГАЦИОННО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ | 2014 |
|
RU2568924C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| Способ определения деформаций свайных опор трубопровода с использованием навигационных спутниковых систем | 2023 |
|
RU2821670C1 |
| Способ помехозащищенного приема сигналов систем спутниковой связи | 2020 |
|
RU2738409C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ | 2009 |
|
RU2487370C2 |
| СИСТЕМА СПУТНИКОВОГО МОНИТОРИНГА СМЕЩЕНИЙ ИНЖЕНЕРНЫХ СООРУЖЕНИЙ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ ГЛОНАСС/GPS | 2011 |
|
RU2467298C1 |
Изобретение относится к технологиям высокоточного позиционирования транспортных средств (ВТП ТС) по сигналам глобальных навигационных спутниковых систем (ГНСС). Техническим результатом является повышение точности позиционирования ТС. Упомянутый технический результат достигается тем, что программно-аппаратный комплекс высокоточного позиционирования ТС с использованием сигналов ГНСС содержит базовую станцию высокоточного позиционирования (БС ВТП), размещенную стационарно, в предварительно геопривязанном месте, транспортный терминал высокоточного позиционирования (ТТ ВТП), размещенный на ТС и серверный модуль, установленный стационарно, при этом ТТ ВТП содержит модуль высокоточного позиционирования (ВТП), который выполнен с возможностью приема дифференциальной поправки RTK (Real Time Kinematic) по двум дублирующим друг друга каналам: LTE канал, где обмен осуществляется по унифицированному транспортному протоколу EGTS (Era Glonass Telematics Standard) и UHF (Ultra High Frequency) радиоканалу для уточнения собственного местоположения по данной поправке, а также ТТ ВТП выполнен с возможностью одновременного приема модулем ВТП сигналов ГНСС в двух частотных диапазонах: L1 (1559-1606 МГц) и L2 (1197-1249 МГц). 2 н. и 10 з.п. ф-лы, 5 ил.
1. Программно-аппаратный комплекс высокоточного позиционирования транспортного средства (ТС) с использованием сигналов глобальных навигационных спутниковых систем (ГНСС), содержащий, по меньшей мере, следующее:
- базовую станцию высокоточного позиционирования (БС ВТП), размещенную стационарно, в предварительно геопривязанном месте, выполненную с возможностью приема сигналов навигации ГНСС, посредством обмена данными со спутниками, вычисления дифференциальной RTK (Real Time Kinematic) поправки посредством навигационного чипа БС ВТП, определяющей ошибку местоположения при текущем расположении спутников над ТС, при этом RTK поправка транслируется на ТС по двум дублирующим друг друга каналам: LTE канал и UHF (Ultra High Frequency) радиоканал;
- транспортный терминал высокоточного позиционирования (ТТ ВТП), размещенный на ТС, содержащий, по меньшей мере: модуль высокоточного позиционирования (ВТП) и, подключенные к модулю ВТП, - антенну ГНСС и антенну UHF, при этом терминал ТС выполнен с возможностью приема RTK поправки по дублирующим друг друга каналу каналам UHF и LTE для уточнения собственного местоположения по данной поправке, а также с возможностью транслирования данных местоположения на серверный модуль по протоколу EGTS (Era Glonass Telematics Standard) с частотой до 3 раз в секунду;
при этом ТТ ВТП также выполнен с возможностью одновременного приема модулем ВТП сигналов ГНСС в двух частотных диапазонах: L1 (1559-1606 МГц) и L2 (1197-1249 МГц);
- серверный модуль, установленный стационарно, содержащий, по меньшей мере: LTE модем, выполненный с возможностью приема данных местоположения ТС; сервер позиционирования, выполненный с возможностью сохранения данных местоположения ТС в базе данных, а также транслирования данных местоположении ТС по протоколу EGTS в верхнеуровневые системы, посредством каналов передачи данных сервера позиционирования.
2. Программно-аппаратный комплекс по п. 1, отличающийся тем, что ТС являются такие транспортные средства, которые осуществляют городские пассажирские перевозки: автобусы, троллейбусы, трамваи, электробусы.
3. Программно-аппаратный комплекс по п. 1, отличающийся тем, что высокоточное позиционирование ТС производится на территориях автобусных, трамвайных, троллейбусных парков, и прилегающих территориях.
4. Программно-аппаратный комплекс по п. 1, отличающийся тем, что точность позиционирования ТС составляет до 1,5 м и обеспечивается на расстоянии до 20 км от места расположения БС ВТП, далее точность будет снижаться.
5. Программно-аппаратный комплекс по п. 1, отличающийся тем, что также выполнен с возможностью обеспечения контроля скоростного режима и направления движения ТС.
6. Программно-аппаратный комплекс по п. 1, отличающийся тем, что обеспечивает возможность трансляции по унифицированному транспортному протоколу EGTS высокоточных навигационных данных о местоположении ТС в верхнеуровневые системы, осуществляющие мониторинг, контроль и управление ТС и объектами транспортной инфраструктуры.
7. Способ определения местоположения ТС с использованием программно-аппаратного комплекса высокоточного позиционирования ТС с использованием сигналов ГНСС, содержащий, по меньшей мере, этапы, на которых осуществляют:
- прием навигационных данных от ГНСС;
- вычисление дифференциальной RTK поправки посредством навигационного чипа БС ВТП, определяющей ошибку местоположения при текущем расположении спутникового созвездия над ТС,
при этом RTK поправка транслируется на ТС по двум дублирующим друг друга каналам: LTE канал и UHF радиоканал;
- прием на ТТ ВТП RTK поправки по каналу каналам UHF и LTE, где средствами встроенного ПО осуществляется уточнение вычисленных по сигналам ГНСС навигационных данных;
- трансляцию по каналу LTE данных о местоположении ТС посредством ТТ ВТП на серверный модуль с частотой до 3 раз в секунду по протоколу;
- одновременный прием модулем ВТП сигналов ГНСС в двух частотных диапазонах: L1 (1559-1606 МГц) и L2 (1197-1249 МГц);
- прием данных о местоположении ТС на серверном модуле, установленном стационарно, содержащем, по меньшей мере, LTE модем, и сервер позиционирования;
- сохранение данных о местоположении ТС в базе данных сервера позиционирования;
- трансляцию данных местоположении ТС по протоколу EGTS в верхнеуровневые системы посредством каналов передачи данных сервера позиционирования.
8. Способ по п. 8, отличающийся тем, что ТС являются транспортные средства, которые осуществляют городские пассажирские перевозки: автобусы, троллейбусы, трамваи, электробусы.
9. Способ по п. 8, отличающийся тем, что высокоточное позиционирование ТС производится на территориях автобусных, трамвайных, троллейбусных парков, и прилегающих территориях.
10. Способ по п. 8, отличающийся тем, что точность позиционирования ТС составляет до 1,5 м и обеспечивается на расстоянии до 20 км от места расположения БС ВТП, далее точность будет снижаться.
11. Способ п. 8, отличающийся тем, что обеспечивается контроль скоростного режима и направления движения ТС.
12. Способ по п. 8, отличающийся тем, что обеспечивается возможность трансляции по унифицированному транспортному протоколу EGTS высокоточных навигационных данных о местоположении ТС в верхнеуровневые системы, осуществляющие мониторинг, контроль и управление ТС и объектами транспортной инфраструктуры.
| CN 109166189 A, 08.01.2019 | |||
| CN 113132893 A, 16.07.2021 | |||
| US 10943483 B2, 09.03.2021 | |||
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2018 |
|
RU2683584C1 |
| CN 209946398 U, 14.01.2020 | |||
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| RU 2020114350 A, 22.10.2021. | |||
