Изобретение относится к области навигации, в частности к способам высокоточного позиционирования наземных объектов в сложных условиях эксплуатации, в которых традиционные и спутниковые методы навигации не могут обеспечить требуемую точность и скорость определения координат и азимута. Предлагаемый способ обеспечивает высокоточную навигацию лесозаготовительной техники в условиях, не позволяющих применять традиционные и спутниковые методы навигации, и может быть использован в процессе лесоустроительных и лесозаготовочных работ.
Известен способ навигации движущихся объектов, заключающийся в использовании эталонной карты местности как априорной информации о навигационном поле, выборе участка местности (мерный участок), находящегося в пределах эталонной карты и задаваемого в виде высот рельефа в узлах координатной сетки с некоторым шагом, наложенной на мерный участок, составлении текущей карты путем вычисления плановых координат мерного участка на основе измерений наклонных дальностей с помощью многолучевого режима измерения при помощи радиоволн, излучаемых в виде лучей, определении разности результатов многолучевых измерений, сравнении значений плановых координат текущей и эталонной карт в пределах квадрата неопределенности, получении сигнала коррекции траектории движения по трем координатам эталонной карты (плановые координаты и высота) на основе вычисления показателя близости данных при достаточном количестве измерений с привязкой к узлам координатной сетки и управлении движением движущихся объектов путем коррекции их местоположения, отличающийся тем, что сначала определяют предварительное местоположение движущихся объектов без получения сигнала коррекции траектории движения с привязкой к узлам координатной сетки по вычисленным при последних многолучевых измерениях координатам пересечения лучей волн с рельефом мерного участка, а затем уточняют местоположение движущихся объектов путем использования режима проведения измерений с установкой на эталонной карте новых квадратов неопределенности, размеры которых определяются погрешностью вычисления сигнала коррекции траектории движения с привязкой к узлам координатной сетки, а их количество определяется количеством лучей многолучевых измерений, и введения в каждом новом квадрате неопределенности нового шага координатной сетки, причем поверхности между узлами новой координатной сетки эталонной карты являются поверхностями второго порядка, составляют текущую карту путем измерения наклонных дальностей с помощью многолучевого режима измерения при помощи волн, излучаемых в виде лучей, и вычисления плановых координат мерного участка на основе измерений наклонных дальностей с помощью многолучевого режима измерения при помощи волн, причем в качестве волн выступают электромагнитные и иные типы волн, которые распространяются в воздушной, водной и безвоздушной средах, определяют разности результатов многолучевых измерений, сравнивают значения координат текущей и эталонных карт в пределах новых квадратов неопределенностей, получают сигнал коррекции траектории движения по трем координатам эталонной карты (плановые координаты и высота) на основе вычисления нового показателя близости данных при достаточном количестве измерений для новой координатной сетки с заданным шагом, с привязкой к узлам новой координатной сетки для управления движением движущихся объектов путем коррекции их местоположения. (RU 2426073 С1).
Недостатком данного решения является его ориентированность на использование для воздушных судов и работы преимущественно на равнинных территориях, на которых возможно быстро получать мерные участки с рельефом. Так же способ в реальном времени не учитывает изменения, происходящие с объектами, на электронной карте-основе.
Известен способ повышения точности навигации летательных аппаратов по карте высот местности, использующей на расчетном участке трассы радиолокационные измерения карты высот местности для определения уходов и коррекции данных инерциальной навигационной системы (ИНС) о местоположении ЛА. Способ повышения точности навигации ЛА по карте высот местности содержит получение от бортовых навигационных средств априорных координат ЛА, получение эталонной цифровой карты высот местности участка коррекции, радиолокационное измерение высот местности, затем составление измеренной карты высот местности и преобразование координат элементов измеренной карты высот местности в нормальную систему (НСК) с учетом текущих априорных координат ЛА. При этом оценка погрешности измерения крена находится итеративно путем получения последовательности радиолокационных изображений (РЛИ) высот местности в связанной системе координат. Техническим результатом заявленного изобретения является увеличение диапазона рабочих высот ЛА, на которых система навигации по карте высот местности обеспечивает требуемую точность.
Способ ориентирован на применение в области авиации и карта-эталон не меняется в процессе использования данного способа.
(RU 2654955 С2, дата публикации 2018.05.23)
Известен способ определения координат точек объекта, при котором устанавливают угломерный инструмент в точке с известными координатами, с которой последовательно измеряют азимуты и зенитные расстояния до точек объекта, измеряют расстояния между точками объекта, производят математическую обработку результатов измерений и определяют координаты точек объекта, отличающийся тем, что перед измерением расстояний между точками объекта измеряют высоту угломерного инструмента и расстояние от точки стояния до первой определяемой точки объекта, измеряют последовательно расстояния между смежными течками объекта, вычисляют наклонные расстояния от инструмента до точек объекта математическим формулам. (RU 2063610 С1)
Недостатком данного решения является его низкая продуктивность, связанная с необходимостью задействования дополнительных специалистов с геодезическими приборами, которые будут вынуждены выполнять съемочные мероприятия непосредственно в процессе перемещения объекта, координаты которого требуется определять с высокой тонностью.
Известна переносная фотограмметрическая мира, приспособленная для работы в полевых условиях, имеющая средства для фиксации GPS-приемников, которые позволяли бы точно определять координаты математического центра миры, являющегося графическим центром изображения на поверхности миры, не затрагивая поверхность самой миры.
Решение поставленной задачи достигается за счет того, что устройство включает в себя два каркаса-верхний и нижний. Нижний каркас включает в себя ножки, основания ножек и распорку. Верхний каркас включает в себя верхнюю поверхность, на которую нанесена радиальная мира, а на углах которой закреплены тахеометрические треггеры, положение которых относительно математического центра миры жестко зафиксировано твердыми металлическими планками-лучами, GPS-приемник на телескопической подставке и средства для крепления к ножкам, имеющими телескопическое сопряжение. Каждая из ножек представляет собой резьбовую шпильку, а распорка имеет отверстия с резьбой, в которую ввинчиваются упомянутые ножки. Средства для крепления к ножкам представляют собой гайки, свободно перемещаемые по резьбовой шпильке путем их навинчивания на шпильку, и удлиненные отверстия в верхнем каркасе, принимающие упомянутые ножки и позволяющие наклонять верхний каркас за счет перемещения ножек в удлиненных отверстиях. При возможности/необходимости допускается одновременное использование двух и более GPS-приемников. Тахеометрические трегеры крепятся посредством стандартных геодезических крепежных винтов через специальные отверстия в верхнем каркасе. Это обеспечивает достижение технического результата, состоящего в возможности точно определять геодезические координаты центра миры при любом ее наклоне относительно земной поверхности. Расставленные миры служат опорными зенками для решения задачи фотограмметрических засечек и определяют координаты и элементы ориентирования съемочных систем с высокой точностью. (RU 3361111 С1)
Недостатком данного подхода является то, что при высокой точности определения параметров ориентирования средств ДЗЗ в момент съемки, координаты получаются постфактум, на основе фотограмметрической обработки в специальном программном обеспечении в камеральных условиях. Таким образом, для решения задачи навигации эта полезная модель неприменима.
В основе изобретения лежит решение задачи обеспечения навигации в ситуации, когда традиционные методы и методы спутниковой навигации не могут обеспечить требуемой точности определения координат и азимута лесозаготовительной техники, к примеру, под плотным пологом леса.
Технический результат достигается за счет того, что в основу разработанного способа положено применение заранее подготовленной электронной карты лесосеки, на которой с высокой точностью нанесены все деревья, и применение информационно-измерительной системы (ИИС), сопряженной с устройством технического зрения, позволяющей определять пространственное положение деревьев относительно лесозаготовительной машины, обрабатывать полученную информацию в режиме реального времени с учетом убывания деревьев в процессе рубки и определять на их основе положение лесозаготовительной машины в заданной системе координат лесосеки.
Предлагаемый способ навигации лесозаготовительных машин не зависит от метода построения электронной карты лесосеки и не зависит от метода, используемого в системе технического зрения, определяющей координаты деревьев относительно лесозаготовительной машины, но оба метода должны иметь одинаковую точность.
Способ работает следующим образом:
Сущность способа раскрывается на рисунках 1, 2, 3, где
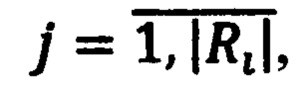
Рис 1. - Системы координат
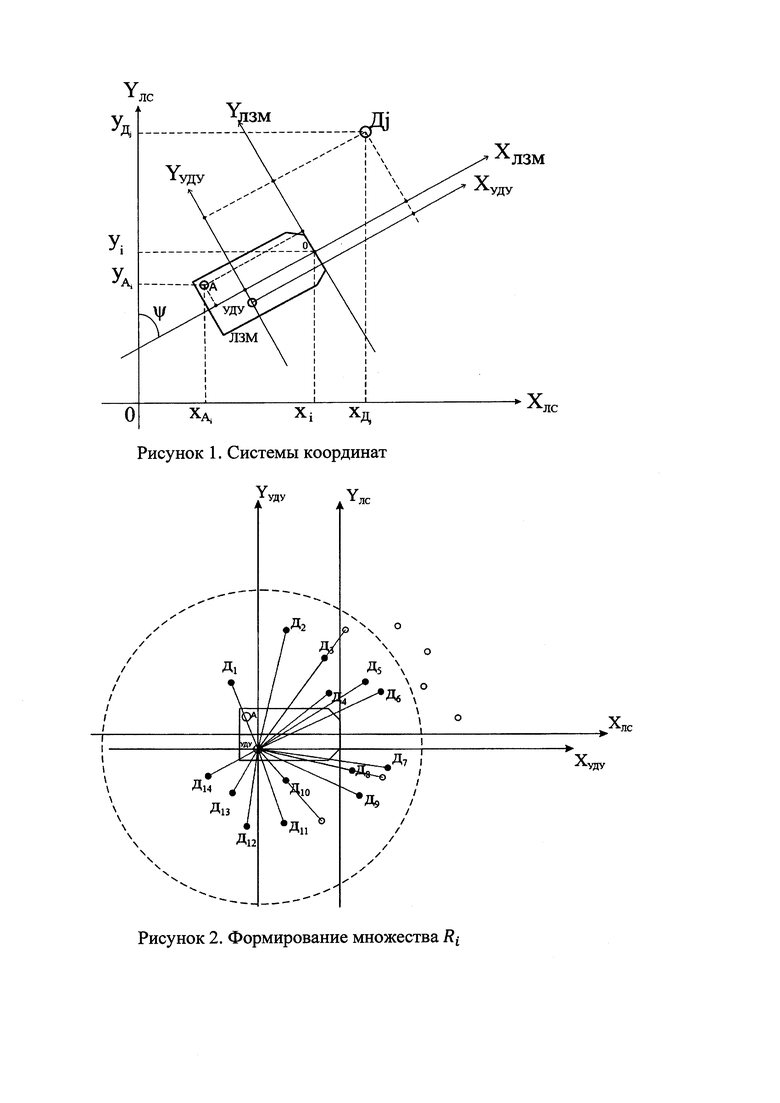
Рис 2. - Формирование множества Ri;
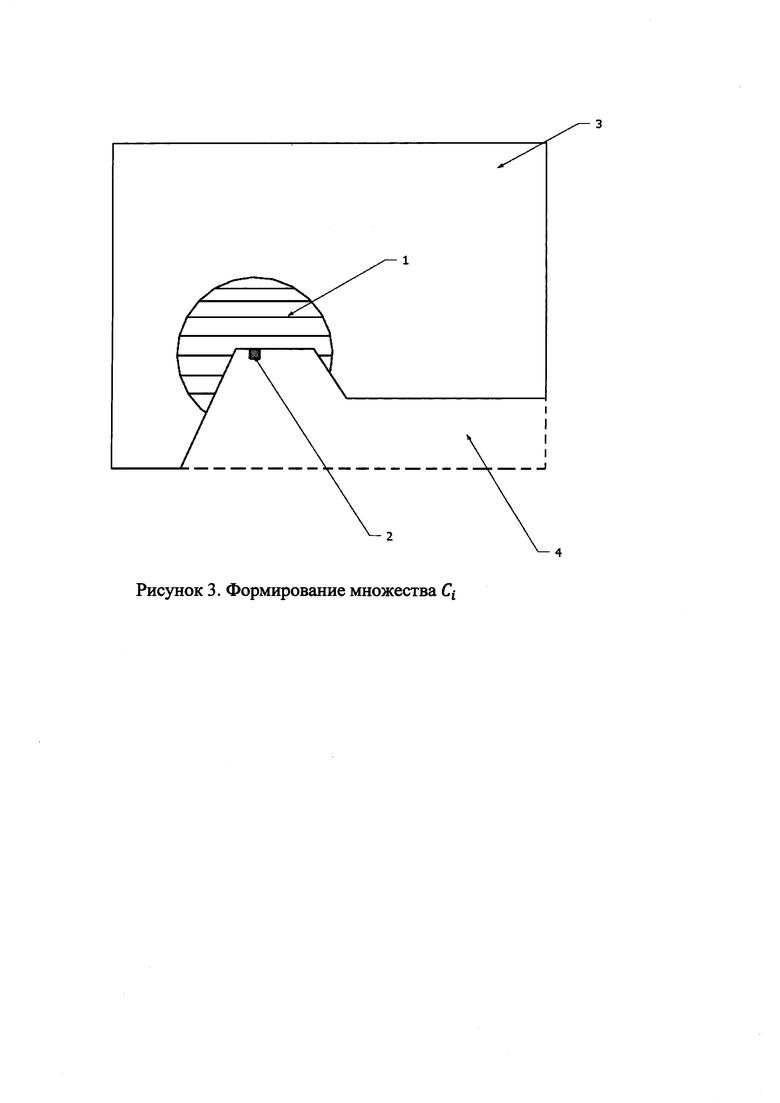
Рис 3. - Формирование множества Ci
Обязательным для работы способа является следующее (Рис. 1).
1. Наличие заранее сформированной высокоточной (эталонной) электронной карты лесосеки (ЛС) с координатами всех стволов деревьев, на основе которых предполагается выполнять засечки с целью определения положения лесозаготовительной машины. Метод создания карты эталона не имеет принципиального значения и может быть основан на стандартных подходах геодезии, фотограмметрии и обработки данных дистанционного зондирования. Двумерная декартовая система координат лесосеки Х0YЛС находится в горизонтальной плоскости.
2. Наличие угломерно-дальномерного устройства (УДУ). Принцип действия УДУ может быть основан на любых физических принципах. УДУ должно измерять координаты точек стволов деревьев в сферической системе координат, связанной с УДУ, а далее на основе полученных данных для каждого дерева, оказавшегося в поле зрения УДУ, вычислять с требуемой точностью в режиме реального времени координаты ствола дерева в декартовой системе координат Х0УУДУ, связанной с УДУ, плоскость которой стабилизирована и удерживается параллельно плоскости карты лесосеки. Конфигурация области поиска деревьев в системе координат Х0УУДУ (поле зрения УДУ) в общем случае может иметь достаточно сложную форму, обусловленную конструктивными особенностями лесозаготовительной машины. Однако в силу относительной малости площади «слепых зон» конфигурация поля зрения УДУ в целом не влияет на результаты работы УДУ, шитому для упрощения изложения будем считать, что поле зрения представляет собой круг. Положение системы координат УДУ относительно системы координат лесозаготовительной машины известно и неизменно. Для определенности будем считать, что ось 0ХУДУ параллельна продольной оси 0Х лесозаготовительной машины (ось 0ХЛЗМ). Точку начала координат лесозаготовительной машины удобно расположить на передней кромке ее корпуса (см. рис. 1). Координаты лесозаготовительной машины в системе координат лесосеки Х0YЛС в i-ой точке маршрута задаются координатами (xi, yi), курс ЛЗМ задается курсовым углом Ψi.
А - антенна спутниковой навигационной системы (СНС)
УДУ - угломерно-дальномерное устройство
Ψi - курсовой угол ЛЗМ
ЛЗМ - лесозаготовительная машина
Дi - дерево, расположенное в поле зрения УДУ
где Ri - множество опознанных деревьев при расположении ЛЗМ в i-ой точке маршрута (Дj ∈ Ri).
3. Наличие на борту лесозаготовительной машины информационно-измерительной системы (ИИС), которая получает от УДУ координаты деревьев в системе координат Х0УУДУ, определяет координаты этих деревьев в системе координат лесосеки Х0УЛС и в системе координат лесозаготовительной машины Х0УЛЗМ, и на основе полученных координат вычисляет координаты и курс лесозаготовительной машины в системе координат лесосеки.
4. Наличие на борту приемника спутниковой навигационной системы (СНС) GPS/ГЛОНАСС, используемой в качестве вспомогательного средства для ускорения решения задачи навигации предлагаемым способом. Координаты антенны СНС в системе координат лесозаготовительной машины известны и неизменны.
Последовательность действий, реализующих способ определения координат лесозаготовительной машины в системе координат лесосеки, представлена ниже.
Шаг 1. Загрузка карты лесосеки с координатами деревьев в информационно-измерительную систему (ИИС) лесозаготовительной машины (ЛЗМ);
Шаг 2. Размещение ЛЗМ в точке старта, координаты которой известны с высокой точностью;
Шаг 3. Определение координат точки старта ЛЗМ с помощью спутниковой навигационной системы (СНС) ЛЗМ и вычисление ошибки СНС ЛЗМ в точке старта;
Шаг 4. В текущей точке маршрута определение положения деревьев, находящихся в поле зрения угломерно-дальномерного устройства (УДУ) ЛЗМ и достижимых для спиливания, в системе координат УДУ ЛЗМ и далее пересчет координат обнаруженных деревьев из системы координат УДУ ЛЗМ в систему координат лесосеки;
Шаг 5. В текущей точке маршрута расчет координат и курса ЛЗМ в системе координат лесосеки и вычисление ошибки СНС ЛЗМ;
Шаг 6. В текущей точке маршрута спиливание деревьев и поиск ранее скрытых за ними других деревьев, достижимых для спиливания, с определением их координат и внесением соответствующих изменений в данные ИИС;
3. Отличительными особенностями данного способа являются:
1. определение координат лесозаготовительной машины с высокой. точностью, сравнимой с точность нанесения деревьев на карту лесосеки, вне зависимости от качества приема сигнала с навигационных спутников, которое может меняться в широких пределах в зависимости от плотности лесного полога, под которым работает лесозаготовительная машина;
2. высокая скорость определения координат лесозаготовительной машины за счет сокращения объема вычислений, производимых информационно-измерительной системой, с применением динамической минимизации радиуса окрестности лесозаготовительной машины - области поиска, - в которой производится поиск деревьев, отсканированных УДУ, а также за счет постоянного уменьшения мощности множества деревьев М в результате удаления спиленных деревьев: карты лесосеки.
Краткое описание чертежей:
Рис 1. - Системы координат.
На данном рисунке представлены системы координат, в которых определяется положение лесозаготовительной машины и окружающих ее деревьев.
А - антенна спутниковой навигационной системы (СНС)
УДУ - угломерно-дальномерное устройство
Ψi - курсовой угол ЛЗМ
ЛЗМ - лесозаготовительная машина
Дj - дерево, расположенное в поле зрения УДУ
Рис 2. - Формирование множества Ri.
На данном рисунке продемонстрировано формирование множества деревьев Ri, пространственное положение которых определяется относительно устройства дистанционного зондирования (УДУ), установленного на лесозаготовительной машине.
 - дерево, ствол которого опознается УДУ
- дерево, ствол которого опознается УДУ
 - дерево, ствол которого загорожен другим деревом и по этой причине не опознается УДУ
- дерево, ствол которого загорожен другим деревом и по этой причине не опознается УДУ
А - антенна спутниковой навигационной системы (СНС)
УДУ - угломерно-дальномерное устройство
Рис 3. - Формирование множества Ci.
На данном рисунке продемонстрировано формирование множества Ci как области поиска, ограничивающей объемы вычислений, необходимых для определения положения лесозаготовительной машины относительно объетов эталонной карты.
1 - область поиска, лноэлгесгиео Ci
2 – ЛЗМ
3 - лесосека, множество М
4 - участок лесосеки, на котором деревья уже спилены.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ отвода лесосек | 2017 |
|
RU2663280C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННО-ТОПОГЕОДЕЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2431803C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| КОМПЛЕКС ДЛЯ ПЕРСОНАЛЬНОЙ НАВИГАЦИИ | 2014 |
|
RU2574309C2 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНЫХ ОБЪЕКТОВ | 2016 |
|
RU2624790C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2010 |
|
RU2426073C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2008 |
|
RU2385468C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЛОКАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ С ИСПОЛЬЗОВАНИЕМ МЕТОДА ОТНОСИТЕЛЬНЫХ ОПРЕДЕЛЕНИЙ ПАРАМЕТРОВ | 2011 |
|
RU2469273C1 |
Изобретение относится к области навигации, в частности к способам высокоточного позиционирования наземных объектов в сложных рабочих условиях. Способ автоматической навигации лесозаготовительной машины (ЛЗМ) в реальном масштабе времени в заданной системе координат, использующий заранее составленную и внесенную в информационно-измерительную систему (ИИС) ЛЗМ карту лесосеки, основанный на знании точных координат точки старта ЛЗМ и вычислении ошибки ее спутниковой навигационной системы (СНС) в точке старта и заключающийся в последовательном определении положения деревьев в каждой точке маршрута, находящихся в поле зрения угломерно-дальномерного устройства (УДУ) ЛЗМ и достижимых для спиливания, в системе координат УДУ ЛЗМ, с последующим пересчетом координат обнаруженных деревьев из системы координат УДУ ЛЗМ в систему координат лесосеки и дальнейшим расчетом координат и курса ЛЗМ в системе координат лесосеки и вычислении ошибки СНС ЛЗМ, спиливании деревьев и поиске ранее скрытых за ними других деревьев, достижимых для спиливания, с определением их координат и внесением соответствующих изменений в данные ИИС. Технический результат применения способа - обеспечение необходимой точности определения координат и курсового угла лесозаготовительной машины в условиях, не позволяющих использовать традиционные методы навигации. 3 ил.
Способ автоматической навигации лесозаготовительной машины (ЛЗМ) в реальном масштабе времени в заданной системе координат, использующий заранее составленную и внесенную в информационно-измерительную систему (ИИС) ЛЗМ карту лесосеки, основанный на знании точных координат точки старта ЛЗМ и вычислении ошибки ее спутниковой навигационной системы (СНС) в точке старта и заключающийся в последовательном определении положения деревьев в каждой точке маршрута, находящихся в поле зрения угломерно-дальномерного устройства (УДУ) ЛЗМ и достижимых для спиливания в системе координат УДУ ЛЗМ, с последующим пересчетом координат обнаруженных деревьев из системы координат УДУ ЛЗМ в систему координат лесосеки и дальнейшим расчетом координат и курса ЛЗМ в системе координат лесосеки и вычислении ошибки СНС ЛЗМ, спиливании деревьев и поиске ранее скрытых за ними других деревьев, достижимых для спиливания, с определением их координат и внесением соответствующих изменений в данные ИИС.
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ КУРСОВОГО УГЛА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2566685C2 |
| ДЕТЕКТОРНЫЙ УЗЕЛ ДЛЯ ПЕРЕДВИЖНОЙ РАБОЧЕЙ УСТАНОВКИ | 2013 |
|
RU2638126C2 |
| US 2009139119 A1, 04.06.2009 | |||
| Способ приготовления степжневого связующего материала "ПТА-2" | 1958 |
|
SU116624A1 |
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЙ В ОТНОШЕНИИ ДЕРЕВА | 2013 |
|
RU2652482C2 |
| US 6792684 B1, 21.09.2004. | |||

