Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к креслу-коляске, обеспечивающему возможность стояния.
Уровень техники
[0002] По меньшей мере 6 миллионов человек во всем мире нуждаются в долгосрочном или постоянном использовании кресла-коляски вследствие утраты функциональности нижних конечностей. Утрата функциональности нижних конечностей может быть вызвана такими состояниями, как повреждение спинного мозга (ПСМ), травматическое повреждение головного мозга (ТПГМ), инсульт, церебральный паралич (ЦП), спинальный дизрафизм, множественный склероз (МС) и др. Длительное пребывание в положении сидя в кресле-коляске может вызвать физиологическое или психологическое истощение или способствовать ему. Результатом такого истощения может быть неудовлетворительное состояние здоровья, плохое качество жизни, низкая самооценка и высокие расходы на медицинское обслуживание. Кроме того, сидение в кресле-коляске может оказывать негативное влияние или препятствовать социальному взаимодействию с лицами, имеющими возможность стоять.
[0003] Имеются описания кресел-колясок, позволяющих пользователю стоять. Различные конфигурации таких описанных кресел-колясок служат для разных целей. Некоторые из них позволяют пользователю стоять во время ограниченного движения кресла-коляски. Однако такие описанные кресла-коляски наиболее эффективны в движении, когда пользователь находится в положении сидя. Устойчивое движение кресла-коляски, когда пользователь стоит, может быть ограничено, например, относительно медленным движением по горизонтальным поверхностям.
Раскрытие изобретения
[0004] В соответствии с некоторыми вариантами осуществления настоящего изобретения обеспечено устройство, представляющее собой кресло-коляску, обеспечивающее возможность стояния, и содержащее: колесную базу, позволяющую устройству перемещаться по опорной поверхности; узел крепления, содержащий множество фиксаторов, присоединяемых к частям тела пользователя устройства, при этом по меньшей мере некоторые смежные фиксаторы соединены шарнирами; подъемное устройство, установленное на базе и служащее опорой для тазобедренного шарнира узла крепления и выполненное с возможностью подъема или опускания тазобедренного шарнира таким образом, что, когда пользователь зафиксирован в узле крепления и находится в положении сидя, подъем тазобедренного шарнира приводит пользователя в положение стоя, а, когда пользователь зафиксирован в узле крепления и находится в положении стоя, опускание тазобедренного шарнира приводит пользователя в положение сидя или полулежа.
[0005] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения колесная база содержит приводные колеса, которыми может управлять пользователь для приведения устройства в движение по опорной поверхности.
[0006] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения колесная база содержит поворотные колеса или управляемые колеса.
[0007] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения тазобедренный шарнир представляет собой активный шарнир.
[0008] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения коленный шарнир узла крепления представляет собой активный шарнир.
[0009] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения подъемное устройство содержит по меньшей мере одну стойку с регулируемой высотой.
[0010] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения указанная стойка расположена таким образом, что когда пользователь зафиксирован в узле крепления и находится в положении стоя, он находится, главным образом, над эпицентром колесной базы.
[0011] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения указанная стойка содержит механизм для регулирования высоты стойки, при этом указанный механизм выбирают из группы механизмов, включающей двигатель постоянного тока, шариковинтовую передачу, гидравлический поршень, пневматический поршень, тросовый привод Боудена и тросовый блок.
[0012] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения колесная база содержит платформу, установленную с возможностью наклона относительно шасси, к которым прикрепляют колеса колесной базы, при этом узел крепления наклоняется вместе с платформой.
[0013] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения устройство содержит датчик для определения наклона платформы.
[0014] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения устройство содержит контроллер, выполненный с возможностью поддержания заданного наклона платформы относительно горизонтали.
[0015] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения указанный контроллер содержит пропорционально-интегрально-дифференциальный (ПИД) контроллер.
[0016] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения устройство содержит двигатель, управление которым позволяет регулировать наклон платформы.
[0017] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения, устройство содержит пользовательский элемент управления, предназначенный для управления функционированием устройства.
[0018] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения указанный элемент управления содержит управляемое пользователем устройство, которое выбирают из группы управляемых пользователем устройств, состоящей из джойстика, датчика наклона, датчика силы и микрофона.
[0019] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения устройство содержит по меньшей мере один опорный рычаг, который может быть выдвинут, чтобы предотвратить опрокидывание устройства.
[0020] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения указанный по меньшей мере один опорный рычаг установлен с возможностью выдвижения с каждой стороны устройства.
[0021] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения устройство содержит контроллер, выполненный с возможностью автоматического выдвижения указанного по меньшей мере одного опорного рычага в случае показания опрокидывания устройства.
[0022] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения устройство содержит датчик для подачи сигнала, указывающего на опрокидывание устройства.
[0023] Кроме того, в соответствии с некоторыми вариантами осуществления настоящего изобретения указанный датчик выбирают из группы датчиков, состоящей из датчика наклона, акселерометра, гироскопа, датчика силы и датчика приближения.
Краткое описание чертежей
[0024] Для лучшего понимания и настоящего изобретения и оценки его практического применения представлены следующие чертежи, на которые приводятся ссылки в дальнейшем описании. При этом следует понимать, что данные чертежи приведены только в качестве примеров и ни в какой степени не ограничивают объем изобретения. Аналогичные компоненты обозначены на чертежах одинаковыми ссылочными номерами.
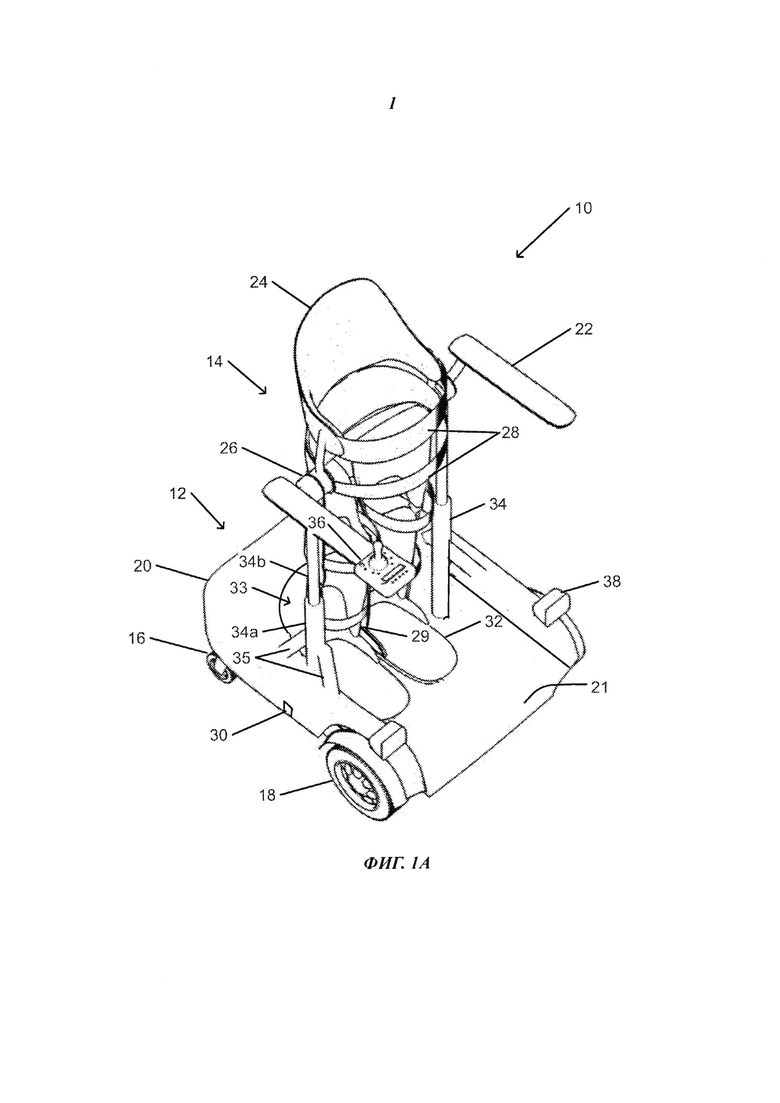
[0025] На фиг. 1А показано кресло-коляска, обеспечивающее возможность стояния, в вертикальной подвижной конфигурации в соответствии с вариантом осуществления настоящего изобретения.
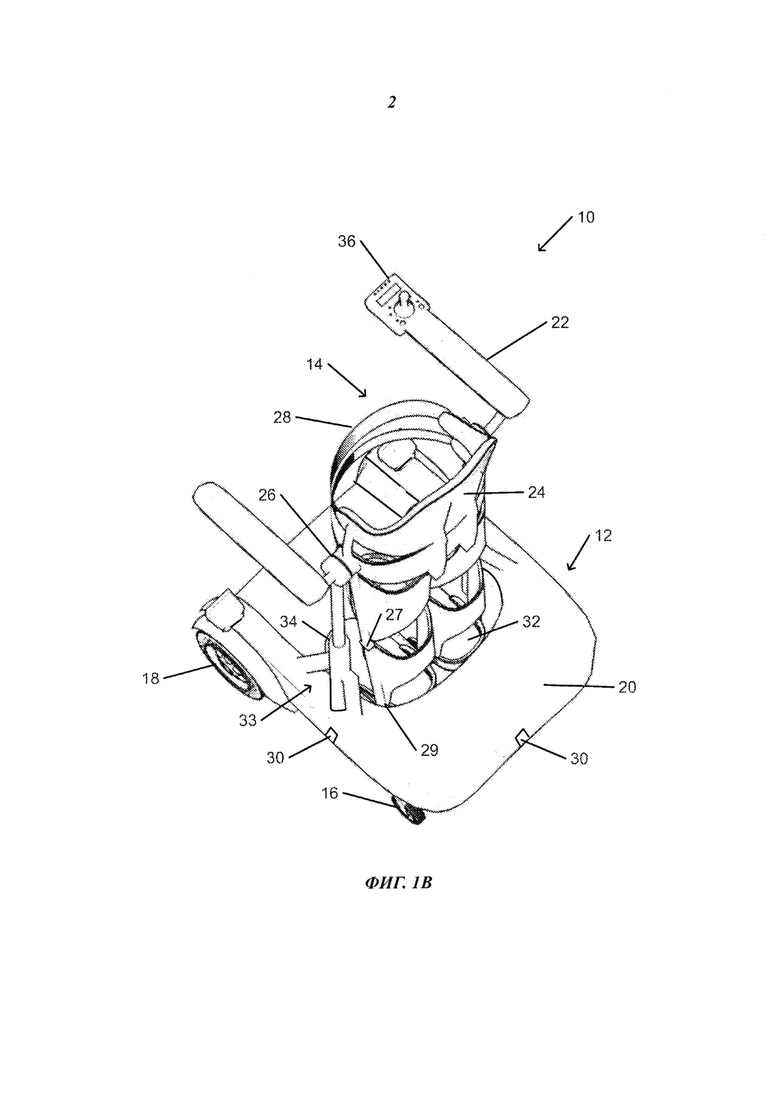
[0026] На фиг. 1В показанное на фиг. 1А кресло-коляска, обеспечивающее возможность стояния, представлена под другим углом.
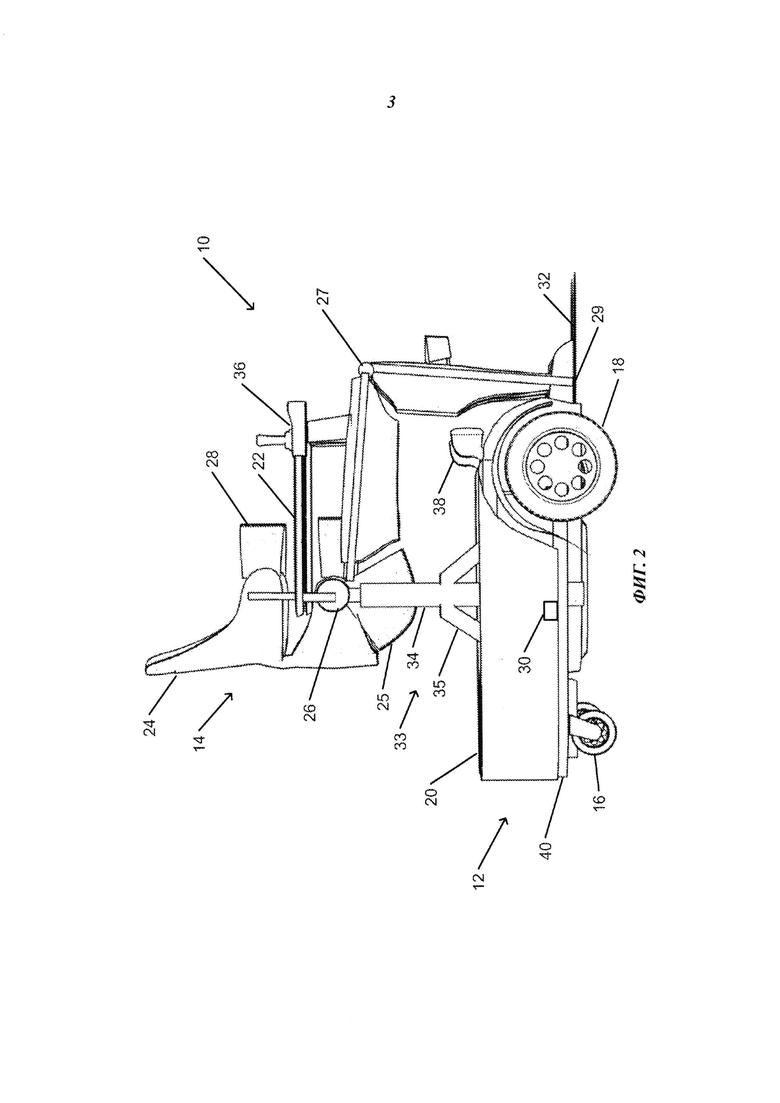
[0027] На фиг. 2 показан вид сбоку показанного на фиг. 1А кресла-коляски, обеспечивающего возможность стояния, в сидячей конфигурации в соответствии с вариантом осуществления настоящего изобретения.
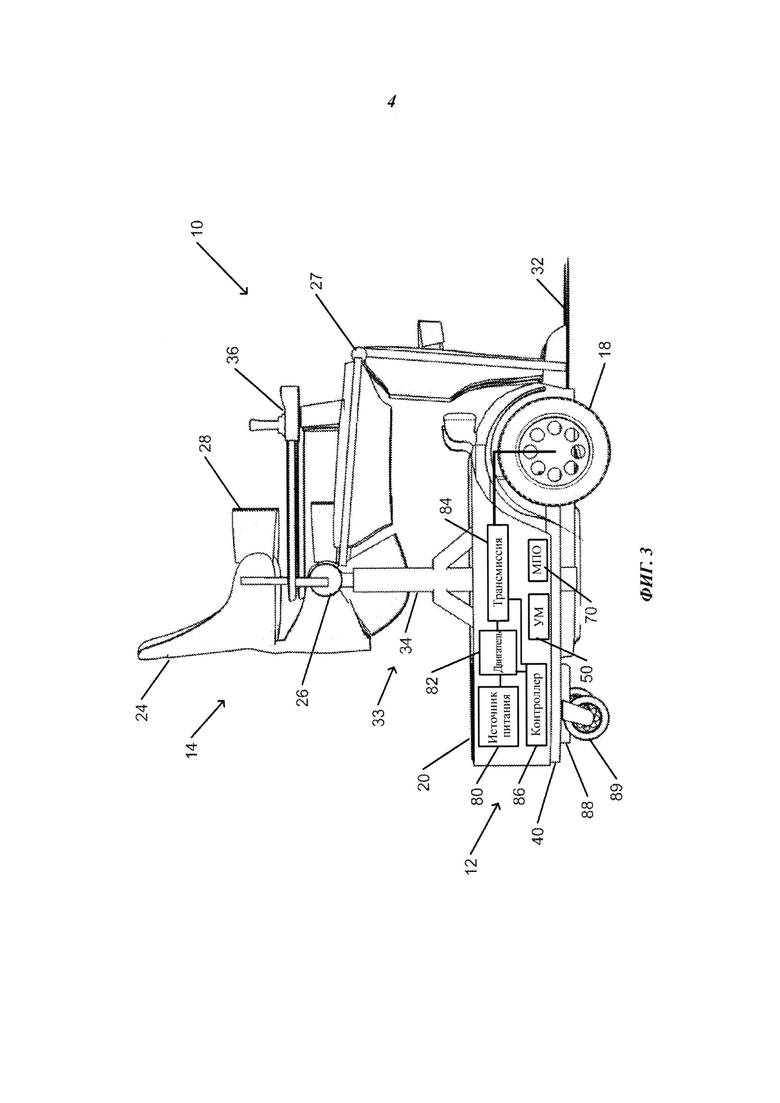
[0028] На фиг. 3 схематически показаны рабочие системы кресла-коляски, обеспечивающего возможность стояния, в соответствии с вариантом осуществления настоящего изобретения.
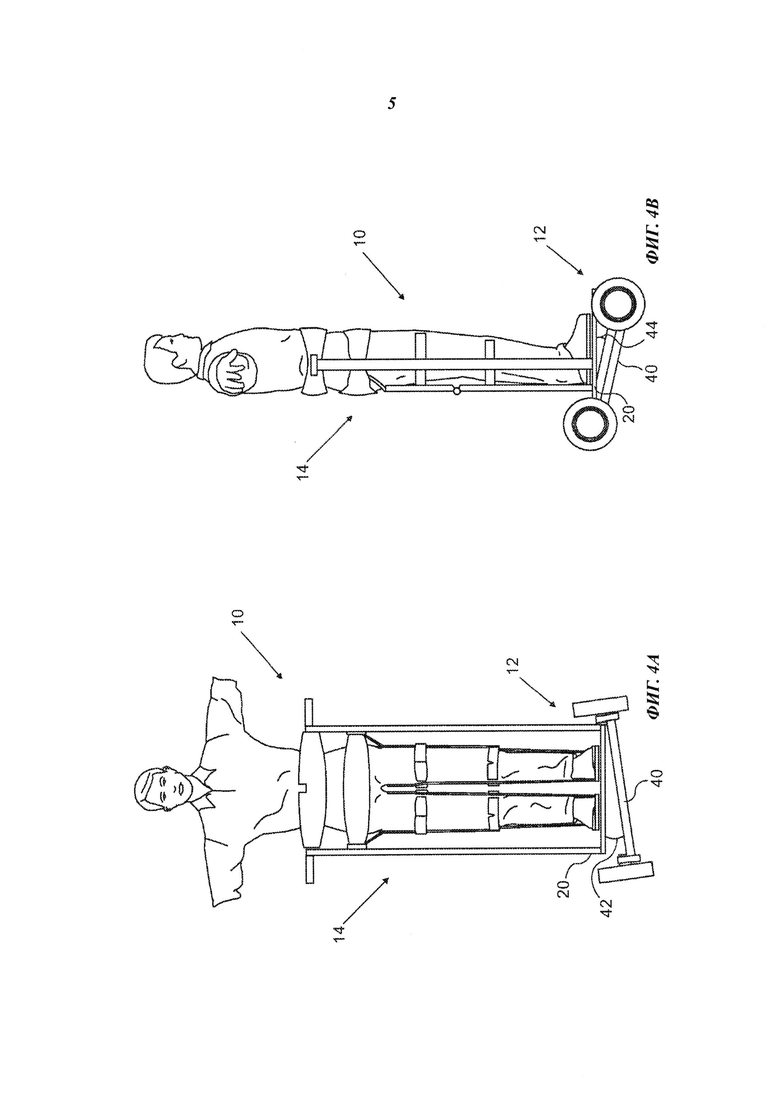
[0029] На фиг. 4А схематически показана работа поперечного уравновешивающего механизма кресла-коляски, обеспечивающего возможность стояния, в соответствии с вариантом осуществления настоящего изобретения.
[0030] На фиг. 4В схематически показана работа продольного уравновешивающего механизма кресла-коляски, обеспечивающего возможность стояния, в соответствии с вариантом осуществления настоящего изобретения.
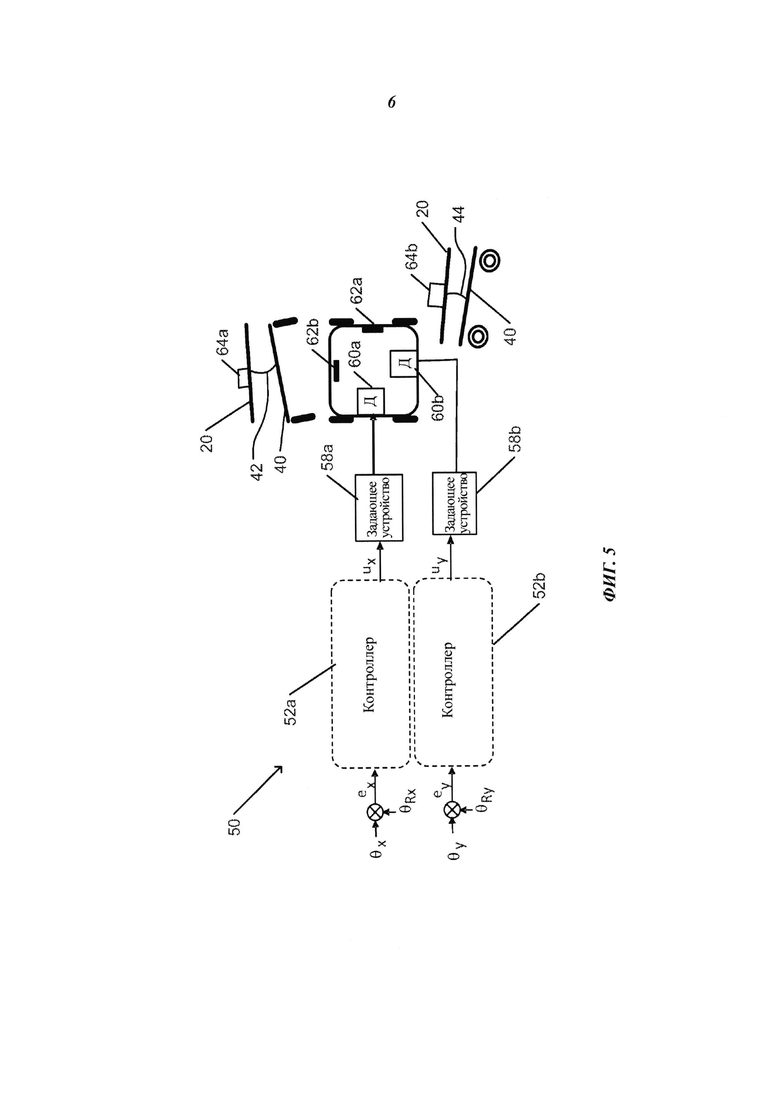
[0031] На фиг. 5 схематически показана система управления уравновешивающим механизмом кресла-коляски, обеспечивающего возможность стояния, в соответствии с вариантом осуществления настоящего изобретения.
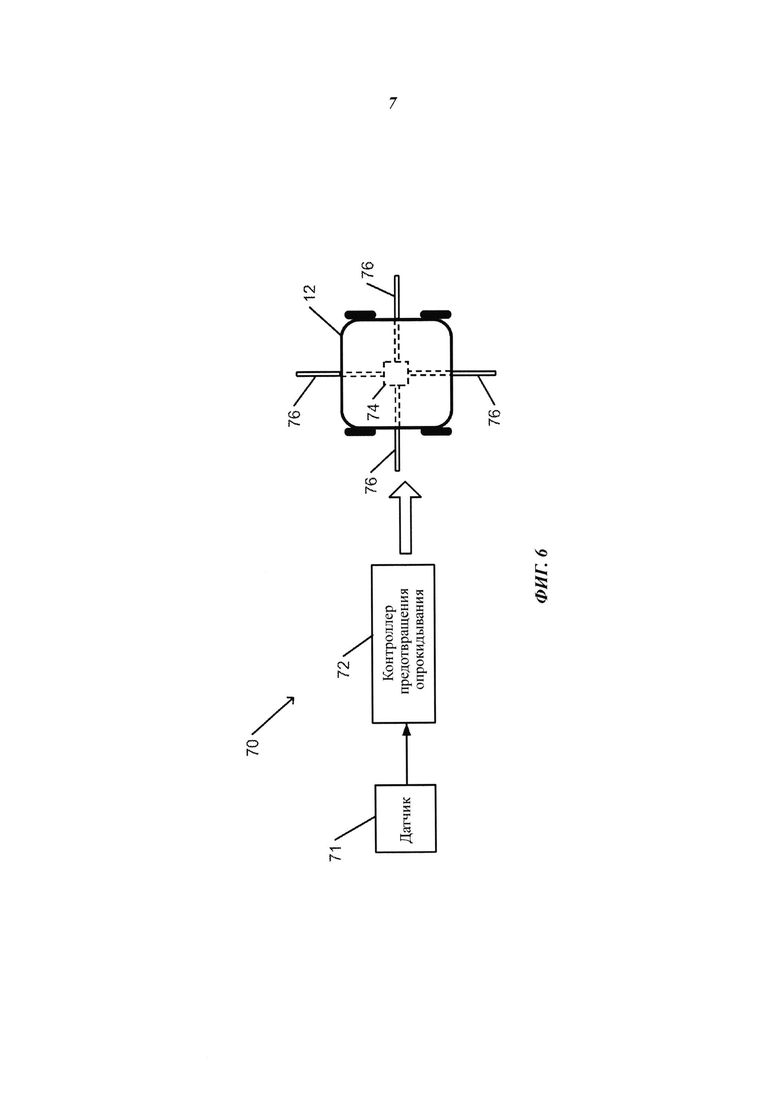
[0032] На фиг. 6 схематически показана работа механизма предотвращения опрокидывания кресла-коляски, обеспечивающего возможность стояния, в соответствии с вариантом осуществления настоящего изобретения.
Осуществление изобретения
[0033] В приведенном ниже подробном описании приведено множество конкретных деталей, чтобы обеспечить тщательное понимание изобретения. Однако для рядовых специалистов в данной области техники очевидно, что изобретение может быть реализовано на практике без этих конкретных деталей. В других случаях хорошо известные способы, процедуры, компоненты, модули, блоки и/или контуры не описаны подробно, чтобы не усложнять описание изобретения.
[0034] В соответствии с вариантами осуществления настоящего изобретения, кресло-коляска выполнено таким образом, чтобы пользователь кресла-коляски имел возможность стоять или занимать положение стоя. При этом кресло-коляска выполнено с возможностью самостоятельного передвижения по самым различным поверхностям в устойчивом режиме, в то время как пользователь остается в положении стоя. Кресло-коляска может передвигаться и маневрировать, когда пользователь стоит, по существу, таким же образом, как и тогда, когда пользователь сидит. Кресло-коляска, выполненное с возможностью перемещения, когда пользователь занимает положение стоя, в данном описании называется креслом-коляской, обеспечивающим возможность стояния. (В данном описании пользователь считается стоящим или находящимся в положении стоя, когда конечности пользователя приведены в положение, расположены или ориентированы таким же образом, как у стоящего лица. Пользователь, который стоит или находится в положении стоя, обычно опирается на кресло-коляску, обеспечивающее возможность стояния).
[0035] Кресло-коляска, обеспечивающее возможность стояния, в соответствии с вариантами осуществления настоящего изобретения содержит колесную базу, выполненную таким образом, чтобы позволить креслу-коляске, обеспечивающему возможность стояния, передвигаться по поверхности. Кресло-коляску, обеспечивающее возможность стояния, можно передвигать по поверхности под действием толкающего или тягового усилия. Кресло-коляска, обеспечивающее возможность стояния, может быть моторизовано или выполнено иным образом с возможностью самоходного передвижения по поверхности. Так, например, колесная база может содержать блок питания для подачи электрической или иной энергии для приведения в движение кресла-коляски, обеспечивающего возможность стояния (и выполнения других функций указанной кресла-коляски). Колеса колесной базы могут быть выполнены таким образом, чтобы способствовать движению кресла-коляски, обеспечивающего возможность стояния, по различным поверхностям. Исполнение колесной базы кресла-коляски, обеспечивающего возможность стояния, может быть адаптировано для определенного ряда поверхностей, по которым предполагается движение кресла-коляски, обеспечивающего возможность стояния.
[0036] Кресло-коляска, обеспечивающее возможность стояния, в соответствии с некоторыми вариантами осуществления настоящего изобретения содержит узел крепления, предназначенный для надежной фиксации пользователя, когда он находится в положении стоя или в положении сидя в кресле-коляске, обеспечивающем возможность стояния. Узел крепления содержит фиксаторы, ремни, зажимы, стойки или другие компоненты надлежащей конструкции, которые могут быть использованы для надежного прикрепления пользователя к креслу-коляске, обеспечивающему возможность стояния. Каждый из фиксаторов выполнен с возможностью присоединения к какой-либо части тела пользователя. По меньшей мере некоторые пары смежных фиксаторов соединены шарнирами, позволяющими фиксаторам изгибаться относительно друг друга. Некоторые или все шарниры могут представлять собой активные шарниры, содержащие привод, который может прикладывать к шарниру изгибающую или растягивающую силу. Узел крепления содержит тазобедренный шарнир, выполненный с возможностью расположения вблизи верхней части бедра пользователя. Так, например, тазобедренный шарнир может соединять фиксатор, выполненный с возможностью соединения с нижней частью туловища (абдоминальная область) пользователя, с фиксаторами, выполненными с возможностью соединения с бедрами пользователя. Фиксатор, выполненный с возможностью опоры ягодиц пользователя, когда он находится в положении сидя или полулежа, также может соединяться с тазобедренным шарниром. Опора для ягодиц может быть гибкой (например, изготовленной главным образом из гибкой ткани, резины, пластмассы или другого гибкого материала).
[0037] Кресло-коляска, обеспечивающее возможность стояния, содержит подъемное устройство, установленное на колесной базе. Подъемное устройство выполнено с возможностью подъема или опускания тазобедренного шарнира узла крепления путем соответствующего увеличения или уменьшения расстояния между тазобедренным шарниром и колесной базой. Подъемное устройство может содержать один или более вертикальных линейных приводов. Каждый вертикальный привод может содержать, по существу, вертикальную штангу или стойку изменяемой длины и механизм для изменения ее длины. При этом каждая стойка может, например, соединять тазобедренный шарнир узла крепления с колесной базой. Приводы могут изменять конфигурацию кресла-коляски, обеспечивающего возможность стояния, между сидячей (или полулежачей) конфигурацией и стоячей конфигурацией и наоборот. Стойки могут быть выполнены, например, с возможностью удлинения, чтобы увеличивать расстояние между тазобедренным шарниром и основанием, что приводит к выпрямлению шарниров и, следовательно, заставляет пользователя стоять. Стойки могут быть также выполнены с возможностью укорачивания, чтобы уменьшать расстояние между тазобедренным шарниром и основанием, что приводит к изгибу шарниров и заставляет пользователя принимать положение сидя (или полулежа).
[0038] Когда кресло-коляска, обеспечивающее возможность стояния, находится в сидячей конфигурации, пользователь может быть зафиксирован креплением в положении сидя (Если не указано иного, описание, приведенное здесь для сидячей конфигурации или положения, относится также полулежачей конфигурации или положению, и его следует понимать как применимое к обоим, т.е. к сидячим и полулежачим конфигурациям и положениям). Если кресло-коляска, обеспечивающее возможность стояния, находится в стоячей конфигурации, пользователь может быть надежно зафиксирован в положении стоя. Находясь, главным образом, вертикально в положении стоя, пользователь расположен, главным образом, на одинаковом расстоянии между боковыми сторонами и основанием. Узел крепления может быть также выполнен с возможностью надежной фиксации пользователя в дополнительных положениях. Так, например, узел крепления может быть выполнен с возможностью фиксации пользователя в любом положении, являющемся промежуточным между положением стоя и положением сидя. В качестве другого примера узел крепления может быть выполнен с возможностью фиксации пользователя в положении стоя с наклоном вперед или с наклоном назад или в другом положении, не являющемся положением сидя или положением стоя, а также не является промежуточным положением между положениями сидя и стоя.
[0039] Когда пользователь перемещается между различными положениями (стоя, сидя, полулежа и промежуточными), центр тяжести (ЦТ) пользователя остается, главным образом, на месте (его положение остается, главным образом, неизменным).
[0040] Один или более пользовательских элементов управления может быть предусмотрен для того, чтобы предоставить пользователю возможность управления функционированием кресла-коляски, обеспечивающего возможность стояния. Так, например, элементы управления могут изменять конфигурацию кресла-коляски, обеспечивающего возможность стояния, из текущей конфигурации на какую-либо другую конфигурацию (например, сидячую, стоячую или другую конфигурацию). Элементы управления могут управлять движением колесной базы по поверхности, на которую опирается кресло-коляска, обеспечивающее возможность стояния.
[0041] В соответствии с некоторыми вариантами осуществления настоящего изобретения одна или более конструктивных особенностей кресла-коляски, обеспечивающего возможность стояния, могут обеспечивать безопасное передвижение пользователя в кресле-коляске, обеспечивающем возможность стояния, в положении стоя или сидя. Так, например, узел крепления может быть выполнен таким образом, чтобы колесная база была всегда расположена примерно симметрично относительно центра тяжести (ЦТ) кресла-коляски, обеспечивающего возможность стояния, когда пользователь зафиксирован узлом крепления указанного кресла-коляски. При этом центр тяжести может находиться на примерно одинаковом расстоянии от каждой из боковых сторон колесной базы. В этом случае расстояние от центра тяжести до каждой боковой стороны можно определить как расстояние по горизонтали от центра тяжести до перпендикуляра к указанной стороне. Симметричность (или равноудаленность) колесной базы относительно центра тяжести можно сохранять независимо от конфигурации узла крепления. Так, например, при изменении конфигурации узел крепления может перемещать различные части тела пользователя для сохранения симметричности. Благодаря этому риск опрокидывания минимизируется во всех конфигурациях.
[0042] Кресло-коляска, обеспечивающее возможность стояния, может быть снабжена автоматической системой уравновешивания. Автоматическая система уравновешивания позволяет пользователю сохранять вертикальное положение, когда кресло-коляска, обеспечивающее возможность стояния, передвигается по наклонным поверхностям или по поверхностям с изменяющимся наклоном. Автоматическая система уравновешивания может получать результаты измерения текущего наклона кресла-коляски, обеспечивающего возможность стояния, от одного или более датчиков. Автоматическая система уравновешивания может быть выполнена с возможностью управления одним или более компонентами колесной базы или узла крепления, чтобы обеспечивать сохранение постоянного положения пользователя (например, относительно локальной вертикали или горизонтали). Так, например, один или более компонентов колесной базы или узла крепления могут быть выполнены с возможностью наклона, чтобы противодействовать любому изменению наклона поверхности, по которой передвигается кресло-коляска, обеспечивающее возможность стояния. Таким образом, пользователь чувствует себя комфортно, а риск опрокидывания минимизируется в любой конфигурации и на любой поверхности.
[0043] Кресло-коляска, обеспечивающее возможность стояния, в соответствии с некоторыми вариантами осуществления настоящего изобретения может быть снабжено дополнительными защитными устройствами для предотвращения его случайного опрокидывания. Так, например, в кресле-коляске, обеспечивающем возможность стояния, могут быть предусмотрены дополнительные опорные колеса, рычаги с колесами или стойки, которые могут быть быстро выдвинуты, чтобы предотвратить опрокидывание при возникновении такой опасности (например, по сигналу датчика наклона).
[0044] На фиг. 1А показано кресло-коляска, обеспечивающее возможность стояния, в вертикальной мобильной конфигурации в соответствии с вариантом осуществления настоящего изобретения. На фиг. 1В кресло-коляска, обеспечивающее возможность стояния, показанное фиг. 1А, представлено под другим углом. На фиг. 3 схематически показаны рабочие системы кресла-коляски, обеспечивающего возможность стояния, в соответствии с вариантом осуществления настоящего изобретения.
[0045] Кресло-коляска 10, обеспечивающее возможность стояния, содержит колесную базу 12 и узел 14 крепления. Узел 14 крепления показан в вертикальной мобильной конфигурации. В этой вертикальной мобильной конфигурации узла 14 крепления компоненты узла 14 крепления приведены в положение для поддержки пользователя в положении стоя.
[0046] Колесная база 12 содержит наклоняемую платформу 20, опирающуюся на шасси 40.
[0047] Шасси 40 содержит приводные колеса 18 и поворотные колеса 16. В показанной конфигурации приводные колеса 18 расположены в передней секции колесной базы 12, в то время как поворотные колеса 16 расположены в задней секции колесной базы 12. (Термины "передняя" и "задняя" определяются относительно направления, в котором размещен пользователь кресла-коляски 10, обеспечивающего возможность стояния, будучи надлежащим образом зафиксированным узлом 14 крепления). Приводные колеса 18 могут быть соединены, например, через трансмиссию 84 с приводным двигателем 82, опирающимся на шасси 40. Работой двигателя 82 и трансмиссии 84 можно управлять при помощи пользовательских элементов 36 управления через контроллер 86. Так, например, можно отдельно управлять скоростью вращения каждого из приводных колес 18, чтобы обеспечивать руление кресла-коляски 10, обеспечивающего возможность стояния, а также задавать скорость движения управляемого кресла-коляски 10. Поворотные колеса 16 могут свободно поворачиваться для беспрепятственного управления креслом-коляской 10, обеспечивающим возможность стояния.
[0048] Возможны также другие варианты расположения колес. Так, например, приводные колеса могут быть расположены в задней секции колесной базы, в то время как поворотные колеса расположены в передней секции. В качестве другого примера могут быть предусмотрены управляемые колеса 89, направлением которых управляет механизм 88 управления, при этом они выполнены без возможности свободно поворачиваться, таким образом содействуя управлению креслом-коляской, обеспечивающим возможность стояния. Кроме того, для руления кресла-коляски, обеспечивающего возможность стояния, могут быть предусмотрены дополнительные колеса. Так, например, одно или более приводных колес могут быть расположены в центральной секции колесной базы, в то время как передние и задние колеса могут быть свободно поворотными или управляемыми.
[0049] Колесная база 12 может содержать компоненты, приводящие в движение приводные колеса 18 или иным образом реализующие самоходное движение кресла-коляски 10, обеспечивающего возможность стояния. Колесная база 12 может содержать двигатель 82, обеспечивающий движение приводных колес 18. Двигатель 82 может представлять собой двигатель или двигатели (например, с электрическим или иным питанием). Колесная база 12 может также содержать трансмиссию 84, предназначенную для передачи вращательного движения от двигателя к приводным колесам 18, и блок 80 питания, обеспечивающий питание для работы двигателя. Блок 80 питания для электрического двигателя может содержать, например, одну или более батарей или аккумуляторов, кабель или коннектор для подсоединения аккумулятора к внешнему электрическому источнику питания (например, к линии электрической сети), трансформаторы или преобразователи энергии для преобразования электрической энергии, получаемой в одной форме, в такую форму, которая может быть использована другим компонентом кресла-коляски 10, обеспечивающего возможность стояния, фотоэлектрические элементы или другие компоненты для обеспечения по меньшей мере частичной перезарядки аккумулятора, когда он не присоединен к внешнему источнику питания, и другие компоненты. Если двигатель 82 представляет собой двигатель с топливной системой питания, блок 80 питания может содержать бак для заливки соответствующего топлива, топливный насос или трубопроводную систему или другие системы, связанные с подачей топлива в двигатель 82.
[0050] Колесная база 12 может содержать, размещать или поддерживать дополнительные компоненты, позволяющие безопасно и надежно эксплуатировать кресло-коляску 10, обеспечивающее возможность стояния. Так, например, колесная база 12 может содержать одну или более фар 38 или других ламп, позволяющих осматривать поверхность, по которой движется кресло-коляска 10, обеспечивающее возможность стояния, в условиях темного времени суток или при отсутствии общего освещения. Колесная база 12 может содержать один или более датчиков, измеряющих параметры движения или функционирования кресла-коляски 10, обеспечивающего возможность стояния. Такие датчики могут содержать один или более спидометров, акселерометров, указателей направления (компасов или гироскопов), приемников системы глобального позиционирования (GPS), уклономеров, датчиков приближения или дальномеров (например, для определения потенциальных препятствий, расположенных сверху или в направлении движения кресла-коляски, обеспечивающего возможность стояния), или других датчиков, которые могут быть использованы для определения одного или более состояний, способных оказывать влияние на работу кресла-коляски 10, обеспечивающего возможность стояния. Некоторые или все указанные датчики или дополнительные датчики могут быть расположены на узле 14 крепления.
[0051] Наклоняемая платформа 20 может быть установлена с наклоном относительно шасси 40. Уравновешивающий механизм (УМ) 50 может управлять углами наклона (поперечного или продольного). Узел 14 крепления зафиксирован относительно наклоняемой платформы 20. Поэтому наклон наклоняемой платформы 20 на некоторый угол относительно шасси 40 вызывает наклон узла 14 крепления относительно шасси 40 на такой же угол. Уравновешивающий механизм 50 может управлять, например, одним или несколькими опорными элементами, имеющими регулируемую длину, чтобы наклонять наклоняемую платформу 20 относительно шасси 40. Такие регулируемые элементы могут содержать один или более телескопических, выдвигающихся, скользящих или других элементов или линейных приводов изменяемой длины (например, надувные или имеющие механическое, химическое, термическое или электромагнитное активирование). Регулировочный механизм может содержать винтовой механизм, гидравлический механизм, систему тросовых блоков, линейный привод, управляемый двигателем постоянного тока, или другой соответствующий механизм.
[0052] Так, например, уравновешивающий механизм 50 может поддерживать узел 14 крепления (и, соответственно, пользователя кресла-коляски, зафиксированного в узле 14 крепления) в прямом положении относительно вертикали (например, определяемой линией отвеса), когда шасси 40 опирается на наклонную поверхность.
[0053] Колесная база 12 может содержать конструкцию, предотвращающую опрокидывание, которой управляет механизм 70 предотвращения опрокидывания (МПО), схематически показанный на фиг. 3 и 6. Конструкция, предотвращающая опрокидывание, может содержать множество опорных рычагов 76, которые могут выходить через отверстия 30 или иным образом (например, из-под наклоняемой платформы 20 или из шасси 40) из колесной базы 12. На дальних концах опорных рычагов 76 могут быть предусмотрены колеса, ролики или другие конструктивные элементы, позволяющие рычагам поддерживать кресло-коляску 10, обеспечивающее возможность стояния. Опорные рычаги 76 могут выдвигаться индивидуально, группами по два или более рычагов или все вместе. Обычно предусматривается по меньшей мере один опорный рычаг 76, выдвигаемый с каждой стороны колесной базы 12. Выдвижением опорных рычагов 76 из отверстий 30 может управлять механизм 70 предотвращения опрокидывания, выполненный с возможностью автоматического функционирования. Опорный рычаг 76 может выдвигаться, например в результате резкого освобождения взведенной пружины, при помощи пиротехнического механизма, пневматического механизма или иного механизма или способа.
[0054] Наклоняемая платформа 20 может содержать углубление 21, выполненное с возможностью размещения нижних частей узла 14 крепления, в частности упоров 32 ступней. Углубление 21 может иметь, например, U-образный профиль.
[0055] Узел 14 крепления выполнен с возможностью надежной фиксации на месте пользователя кресла-коляски 10, обеспечивающего возможность стояния, когда пользователь находится в положении стоя, сидя, полулежа, в позиции промежуточной между другими положениями или в другом положении, для которого выполнен узел 14 крепления. Узел 14 крепления выполнен с возможностью перемещения частей тела пользователя для изменения положения тела, например, из положения стоя в положение сидя и наоборот.
[0056] Узел 14 крепления содержит ряд фиксаторов 24, предназначенных для присоединения к различным частям тела пользователя, а именно к нижним частям тела. Так, например, различные фиксаторы 24 могут присоединяться к нижней части туловища, к спине или к тазу пользователя, к каждому бедру пользователя, к задней (икре) или передней части голени, ко всей голени или к другим частям тела пользователя. Узел 14 крепления содержит упоры 32 ступней, на которых размещаются и на которые опираются для фиксации ступни пользователя. Некоторые или все фиксаторы 24 могут быть снабжены ремнями 28 или аналогичными поддерживающими элементами (например, пояс для туловища), которые можно застегивать и регулировать для закрепления части тела пользователя в фиксаторе 24.
[0057] Узел 14 крепления может иметь форму экзоскелета или содержать экзоскелет (ЭС), поддерживающий тело пользователя, главным образом, с одной стороны. ЭС может поддерживать пользователя во всех возможных конфигурациях (стоя, сидя, полулежа или в других конфигурациях). Так, например, в сидячей конфигурации гибкий компонент 25 (показанный на фиг. 2) фиксатора 24 (например, выполненный из гибкой ткани, пластмассы, резины, сетки, решетки или другого гибкого материала, структуры или конструкции) может поддерживать ягодицы пользователя.
[0058] Некоторые или все пары смежных фиксаторов 24 соединяются сгибаемыми шарнирами. Так, например, сгибаемыми могут быть все или некоторые из следующих шарниров: тазобедренный шарнир 26, коленный шарнир 27 и голеностопный шарнир 29. Сгибаемые шарниры могут сгибаться или выпрямляться во время перехода из одного положения пользователя в другое (например, из положения стоя в положение сидя и полулежа или наоборот). Некоторые из сгибаемых шарниров могут быть активными, в которых сила непосредственно прикладывается приводом к каждому из этих шарниров, для того чтобы сгибать или выпрямлять этот шарнир. Другие сгибаемые шарниры могут быть пассивными, при этом каждый из этих шарниров изгибается или выпрямляется в ответ на движение смежных фиксаторов под действием сил, прилагаемых к активным шарнирам.
[0059] В соответствии с некоторыми вариантами осуществления настоящего изобретения тазобедренный шарнир 26 представляет собой активный шарнир, в то время как коленный шарнир 27 и голеностопный шарнир 29 являются пассивными. Возможны также другие конструкции и комбинации активных и пассивных шарниров.
[0060] Например, каждый активный шарнир может быть снабжен небольшим локальным приводным двигателем (например, работающим на постоянном токе). В качестве другого примера может быть предусмотрен соответствующий передаточный механизм для передачи силы сгиба или выпрямления шарнира от удаленного двигателя (например, расположенного в колесной базе 12 или в другом месте). Такой передаточный механизм может содержать, например, тяги, зубчатые передачи, тросы, тросовые приводы Боудена, тросовые блоки или другие пригодные передаточные механизмы. Пассивный шарнир может содержать шарнир, ось, шарикоподшипник или другой механизм, который позволяет пассивное сгибание или выпрямление шарнира.
[0061] Подъемное устройство 33 установлено на колесной базе 12. Подъемное устройство 33 служит опорой для тазобедренного шарнира 26 узла 14 крепления и выполнено с возможностью подъема или опускания тазобедренного шарнира 26. Подъемное устройство 33 может содержать, например, одну или более выдвигаемых стоек 34. Возможны также другие механизмы подъемного устройства 33 (например, система тросовых блоков для подъема или опускания тазобедренных шарниров 26 от конструкции, проходящей над тазобедренными шарнирами 26, или другой механизм).
[0062] Узел 14 крепления соединяется с колесной базой 12 выдвижными стойками 34. При этом верхний конец выдвижной стойки 34 может соединяться, например, с тазобедренным шарниром 26 узла 14 крепления. Выдвижная стойка 34 может быть усилена укрепляющими опорами 35 для того, чтобы она выдерживала изгибающие силы.
[0063] Длину каждой выдвижной стойки 34 можно регулировать. Так, например, каждая выдвижная стойка 34 может содержать два или более телескопических компонента, в частности гильзу 34а, в которой установлена внутренняя стойка 34b с возможностью скольжения. Регулировку длины выдвижной стойки 34а можно осуществлять при помощи соответствующего механизма выдвижения/втягивания. Другие механизмы для регулирования длины выдвижной стойки 34 также могут быть использованы.
[0064] Выдвижная стойка 34 может содержать, например, линейный электрический привод, содержащий двигатель постоянного тока, управляющий шариковинтовой передачей, или гидравлический (или пневматический) поршень, изменяющий длину выдвижной стойки 34. Для регулирования длины выдвижной стойки 34 может быть использован соответствующий насос, расположенный, например, в колесной базе 12. В качестве другого примера моторизованная механическая система (содержащая, например, двигатель и соответствующую трансмиссию, например, содержащую зубчатые передачи, тяги, тросовые приводы Боудена, тросовые блоки или другие компоненты) может быть использована для того, чтобы выдвигать или втягивать выдвижную стойку 34.
[0065] Конфигурация узла 14 крепления может быть изменена путем удлинения или укорачивания выдвижной стойки 34. Так, например, удлинение выдвижной стойки 34 может изменить конфигурацию кресла-коляски 10, обеспечивающего возможность стояния, на вертикальную мобильную конфигурацию, показанную на фиг. 1А и 1В. В вертикальной мобильной конфигурации кресла-коляски 10, обеспечивающего возможность стояния, пользователь, зафиксированный в узле 14 крепления, должен стоять, главным образом, над эпицентром (в горизонтальной плоскости) колесной базы 12 (в частности, центр тяжести пользователя находится главным образом, над указанным эпицентром). Эпицентр (в горизонтальной плоскости) колесной базы 12 может, главным образом, совпадать с ЦТ колесной базы 12. Все фиксаторы 24 расположены примерно вертикально один над другим. Аналогично этому упоры 32 ступней находятся примерно под тем местом, где ожидается расположение тела пользователя.
[0066] Когда кресло-коляска 10, обеспечивающее возможность стояния, в начальном положении находится в вертикальной мобильной конфигурации (как показано на фиг. 1А и 1В), выдвижные стойки 34 могут быть укорочены, чтобы изменить конфигурацию кресла-коляски 10, обеспечивающего возможность стояния, на сидячую конфигурацию. На фиг. 2 показан вид сбоку показанного на фиг. 1А кресла-коляски, обеспечивающего возможность стояния, в сидячей конфигурации в соответствии с вариантом осуществления настоящего изобретения.
[0067] В сидячей конфигурации показанного на фиг. 2 и 3 кресла-коляски 10, обеспечивающего возможность стояния, выдвижные стойки 34 имеют уменьшенную длину, при этом тазобедренный шарнир 26 находится приблизительно на такой же высоте, что и коленный шарнир 27. Упоры 32 ступней выдвинуты вперед (из углубления 21).
[0068] Узел 14 крепления может содержать подлокотники 22. Подлокотники 22 могут быть выполнены с возможностью подъема или опускания по мере необходимости. При этом подлокотники 22 могут, например, складываться вниз или раскладываться в стороны, когда кресло-коляска 10, обеспечивающее возможность стояния, находится в сидячей конфигурации, чтобы дать возможность туловищу пользователя приближаться к столу (при этом ноги пользователя будут находиться под столом).
[0069] Пользователь кресла-коляски 10, обеспечивающего возможность стояния, при помощи элементов 36 управления может управлять различными функциями кресла-коляски 10, обеспечивающего возможность стояния. Так, например, при помощи элементов 36 управления пользователь может управлять самоходным движением кресла-коляски 10, обеспечивающего возможность стояния, по поверхности. Управление движением кресла-коляски 10, обеспечивающего возможность стояния, может содержать управление двигателем (например, мощностью или скоростью вращения двигателя), управление трансмиссией (например, выбор передачи, движение вперед/назад, вращение колес вправо/влево для выполнения поворота), управление механизмом направления движения (например, механизмом, определяющим направление управляемого колеса), управление тормозом, выбор источника питания (например, главная или вспомогательная батарея или источник питания), или другие виды управления, связанные с движением кресла-коляски 10, обеспечивающего возможность стояния. Пользователь при помощи элементов 36 управления может изменять конфигурацию кресла-коляски 10, обеспечивающего возможность стояния.
[0070] Пользовательские элементы 36 управления содержат одно или более устройств, управляемых пользователем. Так, например, пользовательские элементы 36 управления могут содержать устройства ручного управления, в частности джойстик, нажимную кнопку, выключатель, ручку или диск, сенсорную панель или другое устройство ручного управления. Пользовательские элементы 36 управления могут содержать датчики, чувствительные к усилию или ориентации, в частности области, чувствительные к давлению, или соответствующие датчики давления, датчики наклона. Пользовательские элементы 36 управления могут содержать звуковой датчик, в частности микрофон, или звуковой преобразователь для приема звукового сигнала или голосовой команды.
[0071] Пользовательские элементы 36 управления могут содержать одно или более выходных устройств, в частности дисплейные панели или экраны, сигнальные лампы, устройства, генерирующие звук (динамик, сирена, звонок или другие устройства, генерирующие звук), предназначенных для информирования пользователя кресла-коляски 10, обеспечивающего возможность стояния, о текущем статусе кресла-коляски 10, обеспечивающего возможность стояния. Указанный статус может содержать, например, состояние заряда батареи, текущую скорость, текущее направление движения, наличие препятствия, предупреждение о потенциально небезопасной ситуации (например, чрезмерный наклон или ускорение) или статус одной или более частей или узлов кресла-коляски 10, обеспечивающего возможность стояния.
[0072] Например, джойстик, будучи одним из пользовательских элементов 36 управления, может применяться для управления движением кресла-коляски 10, обеспечивающего возможность стояния, по поверхности.
[0073] В качестве другого примера движением кресла-коляски 10, обеспечивающего возможность стояния, можно управлять в зависимости от результата измерения наклона (например, умышленного или непроизвольного) тела пользователя. Один или более датчиков наклона могут быть расположены на теле пользователя (например, на руках, плечах, груди или верхней части спины). Небольшой умышленный наклон вперед верхней части туловища может означать команду движения вперед, в то время как наклон вправо и влево может указывать на команды движения вправо или влево, соответственно. Аналогично этому наклон или изгиб назад может означать команду остановки, в то время как продолжение наклона назад может быть управляющим сигналом для движения назад. Внезапное (например, непроизвольное) резкое движение тела пользователя может вызывать экстренное торможение, например, как указание на пугающую или неожиданную ситуацию.
[0074] В качестве еще одного примера датчики давления или датчики напряжения могут быть расположены в узле 14 крепления (например, встроенные в ремни 28). Приложенное напряжение, определенное датчиками, может интерпретироваться как команда движения кресла-коляски 10, обеспечивающего возможность стояния. Направление (и, возможно, величина) измеренного напряжения может указывать направление (и, возможно, скорость) требуемого движения.
[0075] Еще одним примером является подача речевых или голосовых команд, которые могут интерпретироваться процессором, встроенным в кресло-коляску 10, обеспечивающее возможность стояния, для указания требуемого движения (или выполнения других функций) креслом-коляской 10, обеспечивающим возможность стояния.
[0076] Один или более пользовательских элементов 36 управления (например, выключатель или нажимная кнопка) могут быть предусмотрены для изменения конфигурации кресла-коляски 10, обеспечивающего возможность стояния.
[0077] Так, например, переход кресла-коляски 10, обеспечивающего возможность стояния, из вертикальной мобильной (стоячей) конфигурации в сидячую конфигурацию может содержать уменьшение длины выдвижной стойки 34, (активный) изгиб тазобедренного шарнира 26 (и поворот фиксатора 24, прикрепленного к бедрам пользователя, и возможно, еще одного фиксатора 24, прикрепленного к верхним частям бедер или ягодицам пользователя), а также (пассивный) изгиб коленного шарнира 27, приводящие к движению вперед упоров 32 ступней. Дальнейший переход из сидячей конфигурации в полулежачую конфигурацию может содержать выпрямление тазобедренного шарнира 26 (и активное выпрямление коленного шарнира 27) без изменения длины выдвижной стойки 34 до достижения требуемой полулежачей позиции.
[0078] Переход кресла-коляски 10, обеспечивающего возможность стояния, из сидячей конфигурации в вертикальную мобильную (стоячую) конфигурацию может содержать, например, удлинение выдвижной стойки 34, (активное) выпрямление тазобедренного шарнира 26, (пассивное) выпрямление коленного шарнира 27, приводящее к обратному движению упоров 32 ступней под тело пользователя.
[0079] В соответствии с некоторыми вариантами осуществления настоящего изобретения кресло-коляска 10, обеспечивающее возможность стояния, может содержать уравновешивающий механизм 50 (УМ) (схематически показанный на фиг. 3 и 5), предназначенный для поддержания пользователя кресла-коляски 10, обеспечивающего возможность стояния, в вертикальном или ином требуемом наклонном положении, когда кресло-коляска 10, обеспечивающее возможность стояния, движется по наклонной поверхности. Уравновешивающий механизм выполнен с возможностью наклона наклоняемой платформы 20 относительно шасси 40 таким образом, чтобы поддерживать наклоняемую платформу 20 в горизонтальной или иной требуемой ориентации (например, когда пользователь наклоняется в требуемом направлении). При этом могут быть предусмотрены, например, отдельные уравновешивающие механизмы для управления наклоном наклоняемой платформы 20 в поперечном направлении (влево-вправо) и в продольном направлении (вперед-назад). В качестве альтернативы один уравновешивающий механизм может управлять наклоном в произвольном направлении.
[0080] На фиг. 4А схематически показано функционирование поперечного уравновешивающего механизма кресла-коляски, обеспечивающего возможность стояния, в соответствии с вариантом осуществления настоящего изобретения.
[0081] Как показано на чертеже, шасси 40 имеет наклон относительно горизонтали в поперечном направлении. Такой наклон может возникнуть, например, когда кресло-коляска 10, обеспечивающее возможность стояния, передвигается по поверхности, имеющей поперечный наклон (например, пересекая наклонную подъездную дорогу, двигаясь по проезжей части с поперечным уклоном или выпуклой проезжей части). Наклоняемая платформа 20 и, следовательно, узел 14 крепления наклонены под поперечным углом 42 наклона, при этом наклоняемая платформа 20 остается горизонтальной (или сохраняет другой требуемый угол наклона).
[0082] На фиг. 4В схематически показано функционирование продольного уравновешивающего механизма кресла-коляски, обеспечивающего возможность стояния, в соответствии с вариантом осуществления настоящего изобретения.
[0083] Как показано на фиг. 4В, шасси 40 имеет наклон относительно горизонтали в продольном направлении. Такой наклон может возникать, когда кресло-коляска 10, обеспечивающее возможность стояния, передвигается по поверхности имеющей наклон вперед или назад (например, по наклонному съезду или по пандусу для кресел-колясок). Наклоняемая платформа 20 и, следовательно, узел 14 крепления имеют наклон в продольном направлении под углом 44, при этом наклоняемая платформа 20 остается горизонтальной (или сохраняет другой требуемый угол наклона).
[0084] Управление уравновешивающим механизмом, управляющим наклоном наклоняемой платформы 20, может осуществляться при помощи одного или более контроллеров.
[0085] На фиг. 5 схематически показано управление уравновешивающим механизмом кресла-коляски, обеспечивающего возможность стояния, в соответствии с вариантом осуществления настоящего изобретения.
[0086] Уравновешивающий механизм 50 может быть, например, выполнен с возможностью сохранения наклоняемой платформы 20 в соответствующей требуемой ориентации, определяемой поперечным опорным углом θRx и продольным опорным углом θRy. В качестве альтернативы или дополнительно может быть определена другая группа углов, в частности величина и ориентация (например, азимут) требуемого наклона. Опорные углы могут быть определены постоянно (например, θRx=θRy=0 для горизонтальной наклоняемой платформы 20 или с другим значением). В качестве альтернативы или дополнительно опорные углы могут быть определены пользователем или в соответствии с заданными критериями для конкретного пользователя или ситуации.
[0087] Наклоняемая платформа 20 (или компонент, присоединенный к наклоняемой платформе 20, в частности, узел 14 крепления) может быть оснащена одним или более датчиками наклона. При этом датчики наклона могут содержать датчик 64а поперечного наклона, предназначенный для измерения поперечного угла θx, и датчик 64b продольного наклона, предназначенный для измерения продольного угла θу наклона. В качестве альтернативы или дополнительно один или более датчиков могут измерять другую группу параметров, в частности величину наклона и направление (например, азимут) наклона. Датчики наклона могут содержать акселерометр, гироскоп или другой тип датчика наклона. Датчик может быть встроен в интегральную схему или в другое электронное устройство.
[0088] Уравновешивающий механизм 50 управляет одним или более компонентами, регулирующими наклон наклоняемой платформы 20 относительно шасси 40. Указанные компоненты могут содержать, например, один или более активных компонентов или приводов, представленных приводом 60а поперечного наклона и приводом 60b продольного наклона. Привод 60а поперечного наклона и привод 60b продольного наклона могут содержать линейные двигатели или приводы (например, стойку изменяемой длины), задающие расстояние между соответствующими точками на наклоняемой платформе 20 и на шасси 40. В качестве альтернативы или дополнительно могут быть использованы другие комбинации двигателей или приводов (например, азимутальный привод наклона). Указанные компоненты могут содержать один или более пассивных компонентов, представленных поперечной возвратной пружиной 62а и продольной возвратной пружиной 62b. При этом один привод, в частности привод 60а поперечного наклона, может работать, например, вблизи одного края наклоняемой платформы 20 и шасси 40, в то время как пассивный компонент, в частности поперечная возвратная пружина 62а, может быть расположен вблизи противоположного края.
[0089] Управление работой привода 60а поперечного наклона осуществляется при помощи задающего устройства 58а поперечного наклона в ответ на изменяющийся во времени (t) управляющий сигнал ux(t) поперечного наклона, генерируемый контроллером 52а поперечного наклона. Управление работой привода 60b продольного наклона осуществляется при помощи задающего устройства 58b продольного наклона в ответ на управляющий сигнал uy(t) продольного наклона, генерируемый контроллером 52b продольного наклона.
[0090] Контроллер 52а поперечного наклона и контроллер 52 продольного наклона могут содержать один контроллер, или два, или более отдельных контроллеров. Каждый контроллер может содержать процессор или электронную схему, выполненные с возможностью управления наклоном наклоняемой платформы 20 с целью обеспечения определенного опорного угла. При этом контроллер 52а поперечного наклона или контроллер 52 продольного наклона может быть выполнен, например, в виде пропорционально-интегрально-дифференциального (ПИД) контроллера, контроллера с обратной связью или контроллера другого типа.
[0091] Контроллер 52а поперечного наклона и контроллер 52 продольного наклона могут быть выполнены для работы на основе ввода опорных углов θRx и θRy, соответственно, и результатов измерения в режиме реального времени углов θx и θу наклона наклоняемой платформы 20. Величина расхождения или ошибки как функция времени t ex(t) или ey(t) может быть рассчитана (например, ex(t)=θх-θRx). Теория пропорционально-интегрально-дифференциального управления или другой алгоритм управления могут быть использованы для определения сигналов ux(t) и uy(t) управления, которые могут подаваться на соответствующее задающее устройство 58а поперечного наклона и задающее устройство 58b продольного наклона, чтобы управлять соответствующим приводом 60а поперечного наклона и приводом 60b продольного наклона. Управляющие сигналы ux(t) и uy(t) могут быть выполнены, например, с возможностью оптимального обеспечения наклона наклоняемой платформы 20, определяемого опорными углами θRx и θRy, или максимально быстрой минимизации функций ошибок ex(t) и ey(t) (например, lex(t)l, ley(t)l) → min, где вертикальные штрихи означают абсолютное значение).
[0092] В соответствии с некоторыми вариантами осуществления настоящего изобретения кресло-коляска, обеспечивающее возможность стояния, снабжено механизмом предотвращения опрокидывания.
[0093] На фиг. 6 схематически показана работа механизма предотвращения опрокидывания кресла-коляски, обеспечивающего возможность стояния, в соответствии с вариантом осуществления настоящего изобретения.
[0094] Механизм 70 предотвращения опрокидывания управляет выдвижением стабилизационных рычагов 76 из колесной базы 12.
[0095] Датчик 71 выполнен с возможностью измерения параметра, являющегося показателем устойчивости или опрокидывания колесной базы 12 кресла-коляски, обеспечивающего возможность стояния. Так, например, датчик 71 может содержать один или более датчиков наклона (например, содержать уровень, гироскоп или акселерометр), измеряющих величину параметра, который можно интерпретировать в качестве показателя устойчивости или неустойчивости колесной базы 12 или кресла-коляски, обеспечивающего возможность стояния. Так, например, можно измерять угол наклона, скорость изменения наклона или ускорение одного или более компонентов кресла-коляски, обеспечивающего возможность стояния. Датчик 71 может содержать датчик приближения (например, оптический, акустический, электромагнитный или механический), который может определять изменение расстояния между колесной базой 12 и поверхностью, на которую опирается кресло-коляска, обеспечивающее возможность стояния. Датчик 71 может содержать датчик напряжения или силы, измеряющий силу, прилагаемую узлом крепления к пользователю кресла-коляски, обеспечивающего возможность стояния. Датчик 71 может содержать датчик напряжения или силы, измеряющий силу между колесом колесной базы 12 и поверхностью, на которой установлено колесо. Датчик 71 может измерять указанную величину как функцию времени или может измерять скорость изменения измеряемой величины.
[0096] Контроллер 72 предотвращения опрокидывания выполнен с возможностью приема сигнала от датчика 71 и управления работой механизма 74 выдвижения рычагов. Так, например, контроллер 72 предотвращения опрокидывания может содержать процессор, выполненный с возможностью функционирования в соответствии с запрограммированными командами, которые сохраняются в соответствующем запоминающем устройстве или в блоке хранения данных. В качестве другого примера контроллер 72 предотвращения опрокидывания может содержать специальное электронное устройство (например, с соответствующей интегральной схемой), выполненное с возможностью управления механизмом 74 выдвижения рычагов в соответствии с сигналом, поступающим от датчика 71.
[0097] Контроллер 72 предотвращения опрокидывания выполнен с возможностью интерпретации сигналов, поступающих от датчика 71, для определения показания опрокидывания или опасности опрокидывания, кресла-коляски, обеспечивающего возможность стояния.
[0098] При этом результат измерения угла наклона может сравниваться, например, с предельно допустимым значением угла. Результат измерения угла наклона, превышающего предельно допустимое значение угла, может служить показателем опрокидывания. Аналогично этому быстрое изменение угла наклона может служить показателем опрокидывания. Углы наклона (скорости их изменения или их абсолютные значения) в каждом направлении (например, вправо, влево, вперед или назад) могут отдельно сравниваться с предельно допустимыми углами для конкретного направления (которые могут отличаться друг от друга, например, вследствие асимметричности формы или конструкции кресла-коляски, обеспечивающего возможность стояния). В качестве альтернативы или дополнительно величина угла наклона или изменение этой величины (например, независимо от направления) может сравниваться с предельно допустимым значением. При обнаружении показаний такого чрезмерного наклона контроллер 72 предотвращения опрокидывания может подавать команду механизму 76 выдвижения рычагов для выдвижения одного или более стабилизационных рычагов 76.
[0099] Другие результаты измерений могут служить показателями наклона. Так, например, внезапное изменение расстояния между колесной базой 12 и поверхностью под колесной базой 12 может служить показателем приближения или пересечения края, в частности, обочины тротуара, ступени, углубления (например, ямы, водостока, желоба, канавы, канала, уступа) или другого изменения уровня поверхности, которое может привести к опрокидыванию. Аналогично этому обнаруженное увеличение силы, действующей на пользователя или на узел крепления, может указывать на чрезмерную поперечную силу (например, на центробежную силу), которая может приводить к опрокидыванию. Внезапное уменьшение силы, действующей со стороны грунта на колесо колесной базы 12, может служить показателем опрокидывания или пересечения края, которое может приводить к опрокидыванию. Любое такое показание при превышении предельно допустимого значения для этого показания может быть интерпретировано как необходимость для механизма 74 выдвижения рычагов выдвинуть один или более стабилизационных рычагов 76.
[00100] Механизм 74 выдвижения рычагов может обеспечивать выдвижение одного или более стабилизационных рычагов 76. При этом стабилизационные рычаги 76 могут быть выдвинуты, например, только с одной стороны, когда имеется показание наклона в эту сторону (или с обеих сторон, когда появляется показание диагонального опрокидывания). Стабилизационные рычаги 76 могут быть выдвинуты вниз или вниз по диагонали. В качестве альтернативы или дополнительно все стабилизационные рычаги 76 могут быть выдвинуты в случае показания опрокидывания (например, для упрощения механизма 74 выдвижения рычагов) или при таких обстоятельствах, когда возникает показание потенциального опрокидывания в любом направлении. Дальние концы стабилизационных рычагов 76 могут быть снабжены роликами или колесами. Такие ролики или колеса могут обеспечивать по меньшей мере ограниченную подвижность или перемещение кресла-коляски, обеспечивающего возможность стояния, после выдвижения стабилизационных рычагов 76.
[00101] Механизм 74 выдвижения рычагов может быть выполнен с возможностью быстрого развертывания стабилизационных рычагов 76.
[00102] Так, например, механизм 74 выдвижения рычагов может содержать предварительно сжатую или взведенную пружину, выполненную с возможностью выдвижения стабилизационного рычага 76. Предусмотренный стопор препятствует силе возврата пружины выдвигать стабилизационный рычаг 76, когда этого не требуется. Затем механизм 74 выдвижения рычагов освобождает стопор, благодаря чему сила возврата пружины быстро выдвигает и разворачивает требуемый стабилизационный рычаг 76. Соответствующий запирающий или стопорный механизм может закреплять стабилизационный рычаг 76 в его выдвинутом положении. В качестве другого примера механизм 74 выдвижения рычагов может содержать подачу сжатого газа (например, из баллона, расположенного за каждым стабилизационным рычагом 76), который может быть использован для быстрого выдвижения и развертывания стабилизационного рычага 76. Другие механизмы (например, магнитный, электромагнитный, гидравлический, пиротехнический, механический или другие механизмы) также могут быть использованы для быстрого развертывания стабилизационного рычага 76.
[00103] В зависимости от механизма развертывания после окончания ситуации с показанием опрокидывания стабилизационные рычаги 76 могут быть возвращены в их исходное положение. Для этого могут быть предусмотрены, например, механизм или управляющее устройство, позволяющие пользователю кресла-коляски, обеспечивающего возможность стояния, убирать стабилизационные рычаги 76. В качестве альтернативы или дополнительно для уборки стабилизационных рычагов 76 может потребоваться помощь лица, не зафиксированного в узле крепления кресла-коляски, обеспечивающего возможность стояния. Так, например, стабилизационные рычаги 76 могут быть вручную задвинуты в колесную базу 12, чтобы они заняли свое исходное положение. В некоторых случаях (например, при использовании механического пружинного или электромагнитного механизма развертывания) возврат стабилизационных рычагов 76 в колесную базу 12 может подготавливать эти стабилизационные рычаги 76 для возможного будущего развертывания. В других случаях (например, при использовании сжатого газа или пиротехнического механизма развертывания) могут потребоваться дополнительные действия (например, закачивание газа, замена газового баллона или замена пиропатрона) для подготовки стабилизационных рычагов 76 к следующему развертыванию.
[00104] Предварительно, одновременно или после развертывания стабилизационных рычагов 76 могут быть сгенерированы один или более аварийных сигналов, например, контроллером 72 предотвращения опрокидывания при помощи соответствующего выходного устройства. Так, например, сигнал, воспринимаемый пользователем, может предупреждать пользователя о показании неизбежного опрокидывания или может извещать пользователя о развертывании стабилизационных рычагов 76. Сигнал, который может восприниматься другими лицами (например, знакомым пользователя, обслуживающим персоналом или прохожими), может указывать на необходимость прийти на помощь пользователю. Дополнительные аварийные сигналы могут указывать на неисправность механизма 70 предотвращения опрокидывания (например, после предыдущего развертывания или после проведения самоконтроля появляется показание о необходимости проведение технического обслуживания). Когда механизм 70 предотвращения опрокидывания неисправен, функционирование приводного механизма кресла-коляски, обеспечивающего возможность стояния, может быть ограничено. Так, например, может быть уменьшена максимально возможная самоходная скорость кресла-коляски, обеспечивающего возможность стояния, когда механизм 70 предотвращения опрокидывания не является полностью работоспособным.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| УСТРОЙСТВО, ПОЗВОЛЯЮЩЕЕ ЭЛЕКТРИЧЕСКОЙ ИНВАЛИДНОЙ КОЛЯСКЕ ПРЕОДОЛЕВАТЬ ПРЕПЯТСТВИЯ | 2011 |
|
RU2564623C2 |
| УЗЕЛ СИДЕНЬЯ | 2011 |
|
RU2547690C2 |
| КРЕСЛО-КОЛЯСКА ДЛЯ ИНВАЛИДОВ И ПАНДУС ДЛЯ ПЕРЕМЕЩЕНИЯ КОЛЯСКИ ДЛЯ ИНВАЛИДОВ ПО ЛЕСТНИЧНЫМ МАРШАМ (ВАРИАНТЫ) | 2011 |
|
RU2478362C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ И ЛЮДЕЙ ПО ЛЕСТНИЦАМ И ПЛОСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2538408C1 |
| Роботизированное кресло-тренажер | 2024 |
|
RU2837297C1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2217119C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДЪЕМА ПО ЛЕСТНИЦАМ, ПРИВОДИМОЕ В ДЕЙСТВИЕ МОТОРОМ | 1998 |
|
RU2201367C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ЗАХВАТА ДВИЖЕНИЙ И ПОЛОЖЕНИЯ ТЕЛА ЧЕЛОВЕКА И ЧАСТЕЙ ТЕЛА ЧЕЛОВЕКА | 2017 |
|
RU2662399C1 |
Изобретение относится к креслу-коляске с возможностью стояния и направлено на повышение безопасности преодолевания неровностей поверхности пользователем в любых положениях находясь на кресле-коляске. Кресло-коляска содержит колесную базу, датчик определения текущего наклона платформы, контроллер, узел крепления и подъемное устройство. Колесная база содержит платформу, установленную с возможностью наклона относительно шасси, с которым соединены колеса колесной базы. Контроллер выполнен с возможностью автоматического генерирования управляющего сигнала для управления работой двигателя с обеспечением регулирования платформы в по меньшей мере двух направлениях в соответствии с определенным значением текущего наклона, чтобы тем самым поддерживать заданный наклон платформы относительно горизонтали. Узел крепления выполнен с возможностью наклона вместе с платформой и содержит множество фиксаторов для присоединения к частям тела пользователя кресла-коляски. По меньшей мере некоторые смежные фиксаторы соединены шарнирами. Подъемное устройство установлено на базе и поддерживает тазобедренный шарнир узла крепления и выполнено с возможностью подъема или опускания тазобедренного шарнира таким образом, что когда пользователь зафиксирован и находится в положении сидя, подъем тазобедренного шарнира приводит пользователя в положение стоя, а когда пользователь зафиксирован в узле крепления и находится в положении стоя, опускание тазобедренного шарнира приводит пользователя в положение сидя или полулежа. 15 з.п. ф-лы, 8 ил.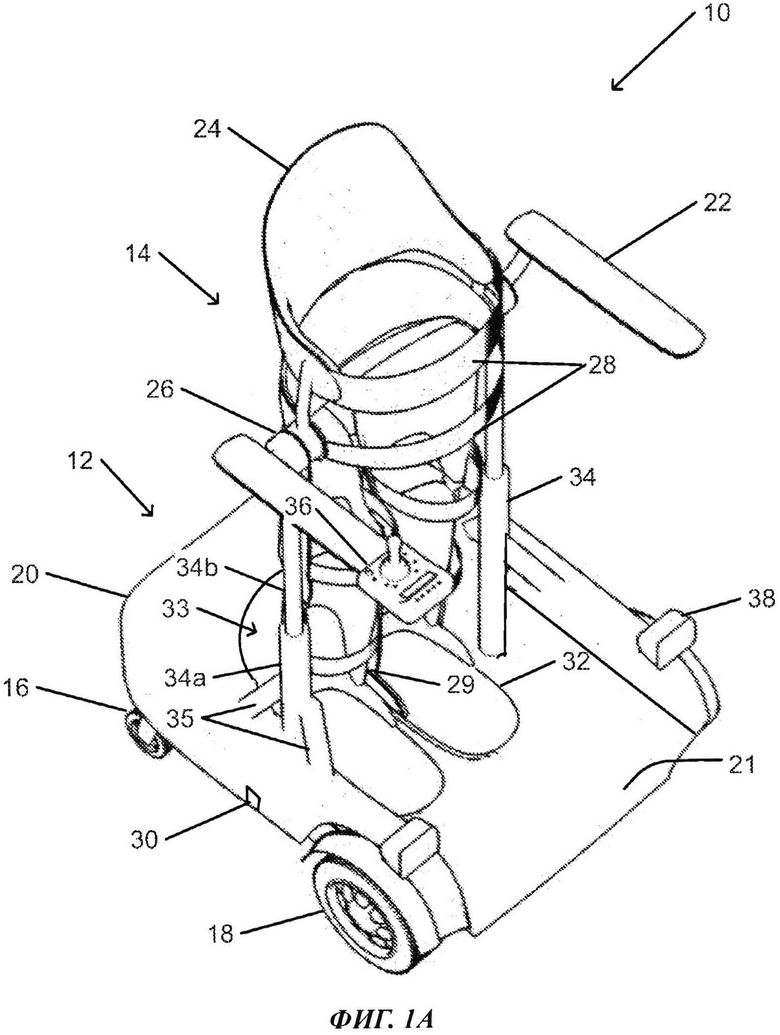
1. Кресло-коляска, обеспечивающее возможность стояния, содержащее:
колесную базу для обеспечения перемещения кресла-коляски по опорной поверхности, причем эта колесная база содержит платформу, установленную с возможностью наклона относительно шасси, с которым соединены колеса колесной базы;
по меньшей мере один датчик определения текущего наклона платформы;
контроллер, выполненный с возможностью автоматического генерирования управляющего сигнала для управления работой по меньшей мере одного двигателя с обеспечением регулирования платформы в по меньшей мере двух направлениях в соответствии с определенным значением текущего наклона, чтобы тем самым поддерживать заданный наклон платформы относительно горизонтали;
узел крепления, выполненный с возможностью наклона вместе с платформой и содержащий множество фиксаторов для присоединения к частям тела пользователя кресла-коляски, при этом по меньшей мере некоторые смежные фиксаторы из указанного множества фиксаторов соединены шарнирами;
и подъемное устройство, установленное на базе, поддерживающее тазобедренный шарнир узла крепления и выполненное с возможностью подъема или опускания тазобедренного шарнира таким образом, что, когда пользователь зафиксирован в узле крепления и находится в положении сидя, подъем тазобедренного шарнира приводит пользователя в положение стоя, а когда пользователь зафиксирован в узле крепления и находится в положении стоя, опускание тазобедренного шарнира приводит пользователя в положение сидя или полулежа.
2. Кресло-коляска по п. 1, отличающееся тем, что колесная база содержит приводные колеса, управляемые пользователем, чтобы обеспечить перемещение кресла-коляски по опорной поверхности.
3. Кресло-коляска по п. 1 или 2, отличающееся тем, что колесная база содержит поворотные колеса или управляемые колеса.
4. Кресло-коляска по одному из пп. 1 или 2, отличающееся тем, что тазобедренный шарнир представляет собой активный шарнир.
5. Кресло-коляска по одному из пп. 1 или 2, отличающееся тем, что коленный шарнир узла крепления представляет собой активный шарнир.
6. Кресло-коляска по одному из пп. 1 или 2, отличающееся тем, что подъемное устройство содержит по меньшей мере одну стойку с регулируемой высотой.
7. Кресло-коляска по п. 6, отличающееся тем, что указанная по меньшей мере одна стойка установлена таким образом, что когда пользователь зафиксирован в узле крепления и находится в положении стоя, то пользователь расположен, главным образом, над эпицентром колесной базы.
8. Кресло-коляска по п. 6, отличающееся тем, что указанная по меньшей мере одна стойка содержит механизм регулирования высоты стойки, который выбирают из группы механизмов, содержащей электродвигатель постоянного тока, шариковинтовую передачу, гидравлический поршень, пневматический поршень, тросовый привод Боудена и тросовый блок.
9. Кресло-коляска по п. 1, отличающееся тем, что указанный контроллер содержит пропорционально-интегрально-дифференциальный (ПИД) контроллер.
10. Кресло-коляска по одному из пп. 1 или 2, отличающееся тем, что содержит пользовательский элемент управления, предназначенный для управления работой кресла-коляски.
11. Кресло-коляска по п. 10, отличающееся тем, что указанный элемент управления содержит управляемое пользователем устройство, которое выбрано из группы, состоящей из джойстика, датчика наклона, датчика силы и микрофона.
12. Кресло-коляска по одному из пп. 1 или 2, отличающееся тем, что содержит по меньшей мере один выдвижной опорный рычаг для предотвращения опрокидывания кресла-коляски.
13. Кресло-коляска по п. 12, отличающееся тем, что указанный по меньшей мере один выдвижной опорный рычаг имеет возможность выдвижения с каждой стороны кресла-коляски.
14. Кресло-коляска по п. 12, отличающееся тем, что содержит контроллер, выполненный с возможностью автоматического выдвижения указанного по меньшей мере одного опорного рычага, когда появляется показание опрокидывания кресла-коляски.
15. Кресло-коляска по п. 12, отличающееся тем, что содержит датчик генерирования сигнала, являющегося показателем опрокидывания кресла-коляски.
16. Кресло-коляска по п. 15, отличающееся тем, что указанный датчик выбран из группы датчиков, состоящей из датчика наклона, акселерометра, гироскопа, датчика силы и датчика приближения.
| US 20100207354 A1, 19.08.2010 | |||
| KR 20120136706 A, 20.12.2012 | |||
| US 5366036 A, 22.11.1994 | |||
| WO 2010109466 A1, 30.09.2010 | |||
| Кресло-коляска для инвалидов | 1987 |
|
SU1685436A1 |

