ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к способу и устройству для контролирования движения пользователя, в частности к способу и устройству для определения риска падания пользователя.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Падениям ежегодно подвержены миллионы людей, что приводит к серьезным травмам, в особенности у пожилых людей. На самом деле подсчитано, что падения являются одной из трех основных причин смерти пожилых людей.
Падение определяется как неожиданное, неконтролируемое и непроизвольное перемещение тела вниз к земле. В настоящее время доступны некоторые системы детектирования падения, которые распознают такие падения и позволяют пользователю получить помощь в ручном или автоматическом режиме, если падение произошло. Типичные детекторы падения могут содержать персональные кнопки вызова помощи (PHB) либо автоматические детекторы, предназначенные для ношения и/или находящиеся во внешнем окружении.
Автоматические детекторы падения содержат один или множество датчиков, измеряющих перемещение пользователя, а также процессор, который сравнивает измеренные или обработанные сигналы с заданными порогами, чтобы распознать падение. В частности, автоматические датчики падения хранят набор заданных порогов и/или наборы параметров. Когда детектор активирован, данные о перемещении, получаемые с датчиков (таких как, например, акселерометр), непрерывно преобразуются и обрабатываются и далее сравниваются с этими наборами параметров для определения, произошло ли падение.
Хотя такие детекторы падения полезны, они в действительности не предотвращают падение, а лишь подают сигнал предупреждения или тревоги в том случае, когда пользователь уже упал.
Однако пользователи, для которых хождение небезопасно, что вызвано или усилено страхом падения, мышечным утомлением, зачастую необходимостью решения множества задач (т.е. при ходьбе они носят предметы, разговаривают с внуком или внучкой и т.д., либо перемещаются в местах со слабым освещением, влажной или неровной поверхностью, такой как плохо расстеленный ковер, при наличии электропроводов, игрушек, инструментов или других опасных предметов) либо под воздействием лекарственных препаратов, которые могут влиять на состояние равновесия или концентрацию внимания, могут иметь поддержку в виде устройства для предотвращения падения, которое снижает фактический риск падения или, по меньшей мере, предупреждает пользователей о повышенном риске падения в определенный момент времени, что придает им чувство безопасности.
Таким образом, существует потребность в способе и устройстве, позволяющих определить мгновенный риск падения для пользователя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно первому аспекту изобретения предложен способ определения риска падения пользователя, при этом способ содержит получение измерений движения пользователя; оценку значения параметра, связанного с походкой пользователя, по результатам измерений; а также определение риска падения пользователя по результатам сравнения оцененного значения с нормальным значением параметра, определенного из движения пользователя, при котором пользователь подвержен нормальному риску падения.
В предпочтительном варианте осуществления этап определения риска падения содержит взвешивание результатов сравнения между оцененным значением и нормальным значением согласно стандартной девиации нормального значения.
Предпочтительно оцененное значение определяется из движения пользователя в течение периода времени, меньшего, чем период времени, в течение которого определяется нормальное значение.
В предпочтительном варианте осуществления этап оценки содержит идентификацию границы шага в полученных измерениях.
В одном варианте осуществления этап идентификации границы шага содержит идентификацию кластеров результатов смежных измерений в полученных измерениях, в которых величина каждого из результатов измерений превышает порог.
В альтернативном варианте осуществления этап идентификации границы шага содержит идентификацию кластеров результатов смежных измерений в полученных измерениях, в которых величина каждого из результатов измерений превышает порог, кроме подмножества результатов измерений, величина которых меньше порога, при условии что подмножество охватывает период времени, меньший, чем пороговое время.
В другом альтернативном варианте осуществления этап идентификации границы шага содержит идентификацию кластеров результатов смежных измерений в полученных измерениях, причем первый полученный результат измерений в полученных измерениях, величина которого превышает первый порог, обозначает первый результат измерений в кластере, при этом первый полученный результат измерений после первого результата измерений в кластере, размер которого оказывается ниже второго порога, обозначает последний результат измерений в кластере, при условии что последнее измерение выполнено по истечении минимального периода после первого измерения.
В любом из данных альтернативных вариантов осуществления этап идентификации границ шага может дополнительно содержать идентификацию границы шага в виде результата измерения в каждом кластере, имеющего наибольшую величину.
В предпочтительном варианте осуществления параметр, связанный с походкой пользователя, содержит размер шага, при этом этап оценки значения параметра содержит интегрирование горизонтальных составляющих полученных измерений, причем пределы интегрирования задаются последовательными идентифицированными границами шага.
В предпочтительном варианте осуществления этап оценки значения параметра содержит исключение из рассмотрения средней скорости пользователя при интегрировании, так что размер шага определяется на основе изменения скорости.
В одном варианте осуществления параметр, связанный с походкой пользователя, содержит, или дополнительно содержит, размер шага вперед, при этом этап оценки значения параметра содержит интегрирование горизонтальных составляющих полученных измерений, причем пределы интегрирования задаются последовательными идентифицированными границами шага, чтобы задать начальное и конечное положения для шага; а также определение размера шага вперед в виде нормы вектора, соединяющего начальное и конечное положения.
Предпочтительно параметр, связанный с походкой пользователя, дополнительно содержит размер шага вбок, при этом этап оценки значения параметра дополнительно содержит определение прямой, проходящей между начальным и конечным положениями; интегрирование полученных измерений, произошедших в течение выполнения шага, чтобы задать ряд положений в течение выполнения шага; определение расстояния между каждым положением и прямой; а также определение размера шага вбок в виде максимального расстояния из этого ряда.
В предпочтительных вариантах осуществления способ дополнительно содержит этап калибровки, который включает в себя получение измерений движения пользователя, когда пользователь подвержен нормальному риску падения; а также оценку нормального значения параметра, связанного с походкой пользователя, по результатам полученных измерений.
Предпочтительно этап оценки содержит оценку значений для множества параметров, связанных с походкой пользователя, по результатам измерений, а этап определения риска падения содержит сравнение оцененных значений со значениями параметров, определенными из движения пользователя, когда пользователь подвержен малому риску падения.
Предпочтительно параметр или параметры, связанные с походкой пользователя, выбираются из следующего ряда: размер шага, ширина шага, продолжительность шага, время существования двойной опоры, скорость походки, ритм, средний размер шага, средняя продолжительность шага, среднее время существования двойной опоры, средняя скорость походки и средний ритм.
Согласно второму аспекту изобретения создано устройство для предотвращения падения, содержащее, по меньшей мере, один датчик для получения измерений движения пользователя устройства; а также процессор для оценки значения параметра, связанного с походкой пользователя, по результатам измерений, а также для определения риска падения пользователя по результатам сравнения оцененного значения со значением параметра, определенным из движения пользователя, при котором пользователь подвержен нормальному риску падения.
Согласно третьему аспекту изобретения создан компьютерный программный продукт, содержащий считываемый компьютером код, который, при исполнении на соответствующем компьютере или процессоре, выполнен с возможностью обеспечения выполнения компьютером или процессором этапов способа, описанного выше.
Согласно альтернативным аспектам изобретения предложены способы определения параметров походки, в том числе границ шага, размера шага, размера шага вперед и/или размера шага вбок, как описано выше и представлено в последующем подробном описании.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения будут описаны лишь в качестве примеров со ссылкой на следующие чертежи, где:
на Фиг. 1 показано устройство для предотвращения падения по изобретению, которое пользователь носит на себе;
на Фиг. 2 более подробно показано устройство для предотвращения падения, представленное на Фиг. 1;
на Фиг. 3 показана блок-схема алгоритма, иллюстрирующая этапы способа по изобретению;
на Фиг. 4 показан график, представляющий результаты измерений, полученных с акселерометра, находящегося в подвеске, которую пользователь носит на шее;
на Фиг. 5 показан график, представляющий результаты измерений, полученных с акселерометра, который пользователь носит на лодыжке;
на Фиг. 6 показан график, представляющий производные результатов измерений, полученных с акселерометра, который пользователь носит на лодыжке;
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Хотя изобретение будет описано с точки зрения способа и устройства, используемого для предотвращения падения, следует понимать, что способ и устройство могут иметь дополнительные функциональные возможности, так что устройство может быть также использовано в качестве детектора падения.
В предпочтительных вариантах осуществления изобретения устройство для предотвращения падения содержит одиночный блок, который пользователь носит на себе.
На Фиг. 1 показано устройство 2 для предотвращения падения, выполненное в виде подвески, которую пользователь 4 носит на шее, а на Фиг. 2 устройство 2 для предотвращения падения показано более подробно.
Устройство 2 для предотвращения падения содержит три датчика - акселерометр 6, магнитометр 8 и гироскоп 10, которые связаны с процессором 12. Процессор 12 получает результаты измерений с датчиков 6, 8, 10 и обрабатывает результаты измерений для определения, подвергается ли пользователь 4 устройства 2 для предотвращения падения повышенному риску падения.
В частности, процессор 12 обрабатывает результаты измерений, полученных с акселерометра 6, магнитометра 8 и гироскопа 10, с целью определения ориентации устройства 2 для предотвращения падения, а также обрабатывает результаты измерений, полученных с акселерометра 6 (используя найденную ориентацию), для определения параметров, относящихся к движению (в особенности к походке) пользователя 4.
Следует понимать, что данные три датчика включены в состав лишь в качестве примера. С использованием сочетания датчиков результаты измерений трех датчиков могут дополнять друг друга для оптимальной оценки ориентации, как известно специалистам в данной области техники. Другие датчики, например барометр и GPS-приемник, могут быть добавлены для дополнительного повышения точности параметров, оцененных устройством 2. Следует также понимать, что датчики можно исключить из состава для уменьшения потребления мощности и снижения стоимости устройства 2, например в простейшем устройстве 2 присутствует только акселерометр 6, и в этом случае возможно лишь оценить наклон устройства 2.
Устройство 2 для предотвращения падения также содержит блок 14 тревожной сигнализации, который может активироваться процессором 12 для предупреждения или извещения пользователя 4 о том, что он подвергается повышенному риску падения. Блок 14 тревожной сигнализации может также содержать (или может быть заменен на) некоторое средство, указывающее пользователю 4 о существующем текущем риске падения, даже если он в данный момент времени не подвергается повышенному риску падения. Например, устройство 2 для предотвращения падения может быть оборудовано средством для обеспечения вибротактильной или акустической обратной связи либо набором световых источников (или световым источником излучения различных цветов), выполненных с возможностью указания существующего текущего риска падения (например, могут присутствовать световые источники, соответствующие малому, среднему и высокому риску падения пользователя 4).
Устройство 2 для предотвращения падения также содержит схему 16 передатчика, которая позволяет устройству 2 для предотвращения падения передать сигнал тревоги или предупреждения на базовую станцию, связанную с устройством 2 для предотвращения падения (которая далее может выдать сигнал тревоги либо привлечь помощь медицинского работника или службы неотложной помощи). Базовая станция также может осуществлять дополнительную обработку результатов измерений датчиков и/или сохранять результаты измерений датчиков для последующего анализа. В альтернативных вариантах осуществления схема 16 передатчика может отсутствовать, если устройство 2 для предотвращения падения не требует связи с базовой станцией для подачи сигнала тревоги или привлечения помощи медицинского работника (например, если устройство 2 для предотвращения падения может устанавливать связь с медицинским работником с помощью звука).
В некоторых вариантах осуществления изобретения (не представленных устройством 2, показанным на Фиг. 2) устройство 2 для предотвращения падения может включать в себя блок памяти для хранения результатов измерений датчиков для последующего анализа.
Известно, что большие отклонения параметров походки (т.е. параметров, связанных с походкой пользователя) соответствуют высокому риску падения. Однако это представляет собой статическое соотношение; дисперсия является средней величиной, полученной в процессе хождения в целом и связана со средним риском падения, который не всегда предоставляет информацию о текущем риске падения пользователя 4. Параметры походки могут включать в себя измерения размера шага, ширины шага, продолжительности шага, времени существования двойной опоры (т.е. времени, в течение которого обе ноги соприкасаются с землей), скорости походки и ритма. Параметры походки могут также включать в себя средние значения вышеуказанных измерений по результатам нескольких шагов, например средний размер шага, среднюю ширину шага, среднюю продолжительность шага, среднее время существования двойной опоры, средняя скорость походки и средний ритм.
Согласно изобретению устройство 2 для предотвращения падения определяет значения параметров походки по результатам измерений датчиков, охватывающих малый отрезок времени, и сравнение этих значений с нормальными значениями для пользователя 4 (т.е. значениями, полученными, когда пользователь 4 подвергается нормальному (т.е. предпочтительно малому или минимальному) риску падения). В частности, устройство 2 для предотвращения падения способно определять различные параметры походки по результатам измерений датчиков, охватывая, например, 12 шагов (или 6 «полных» шагов, совершаемых обеими ногами). Нормальные значения для пользователя 4 можно получить путем получения измерений, когда пользователь 4 идет ровным шагом в течение некоторого времени (например, одной минуты) или для определенного количества шагов (например, 40 шагов).
Способ определения динамического риска падения согласно изобретению показан на Фиг. 3. На этапе 101 датчики 6, 8, 10 измеряют движение пользователя 4, а на этапе 103 процессор 12 оценивает значения требуемых параметров походки по результатам измерений. На этапе 105 процессор 12 далее производит сравнение этих оценок с обычными значениями данных параметров походки для пользователя 4 с целью определения динамического риска падения пользователя. Как указывалось ранее, обычные значения соответствуют тем значениям, которые наблюдались, когда пользователь 4 подвергался нормальному риску падения (т.е. предпочтительно минимальному или малому).
Нормальные или обычные значения параметров походки могут быть получены в процессе калибровки перед применением устройства 2 для предотвращения падения (например, пользователь 4 может носить на себе устройство 2 для предотвращения падения в то время, когда оно пребывает в режиме калибровки, при этом устройство 2 для предотвращения падения может определять значения каждого параметра походки, пока пользователь 4 осуществляет хождение в нормальном режиме).
В предпочтительном варианте осуществления изобретения результаты сравнения между оцененными значениями и нормальными значениями взвешиваются согласно стандартной девиации нормальных значений параметров походки.
Например, если µ представляет среднее калиброванное значение (т.е. среднее для нормальных значений определенного параметра), σ представляет стандартную девиацию среднего калиброванного значения и a представляет значение параметра, наблюдаемое в текущий момент времени, происходит оповещение о девиации, если
 (1)
(1)
превышает порог.
Например,
 (2)
(2)
отображает значение величины от 0 до 1, при этом 1 соответствует нормальной походке (пользователя), а оповещение о девиации от нормальной походки (т.е. пользователь подвергается повышенному риску падения) происходит, если результат вычисления оказывается ниже порога, например, равного 0,7.
Следует понимать, что значения µ и σ обычно являются зависимыми от пользователя и их требуется устанавливать независимо для каждого пользователя.
В одном варианте осуществления изобретения процессор 12 производит оценку значений для среднего размера шага и средней ширины шага. Однако в других вариантах осуществления изобретения могут использоваться другие сочетания параметров походки.
Работа процессора 12 по определению оценок конкретных параметров походки будет описана ниже. Как будет показано, в варианте осуществления, в котором устройство 2 для предотвращения падения представляет собой подвеску, расположенную на шее пользователя 4, способ оценки средних значений a и µ соотносит их скорее с дисперсией размера шага, чем со средним значением, как будет показано ниже. Таким образом, изобретение позволяет эффективно сравнивать текущую и нормальную дисперсии. Следует отметить, что a обычно подвергается осреднению за меньший период, чем µ.
Кроме того, хотя в предпочтительном варианте осуществления изобретения устройство 2 для предотвращения падения выполнено в виде подвески, которую пользователь 4 должен носить на шее, следует понимать, что изобретение может быть реализовано в альтернативных формах, предназначенных для ношения на различных частях тела пользователя 4, например на талии или на лодыжке пользователя 4. Как будет показано ниже, в таких вариантах осуществления требуется изменить процесс обработки данных, используемый для определения параметров походки по результатам измерений датчиков.
Более того, в зависимости от конкретных параметров походки, которые определяются процессором 12 по результатам измерений датчиков (при условии что перемещения пользователя 4 не приводят к быстрым поворотам устройства 2 для предотвращения падения), гироскоп 10, магнитометр 8 либо и магнитометр 8, и гироскоп 10 могут быть исключены из состава устройства 2. В варианте осуществления, в котором устройство 2 для предотвращения падения представляет собой подвеску, обнаружено, что оценка изменения походки обладает меньшей чувствительностью в отсутствие гироскопа 10, но все же способен распознать отклонения от нормальной походки.
Оценка размера шага
Для получения оценки размера шага требуется осуществить ряд этапов обработки данных. В частности, необходимо оценить границы шага и ориентацию акселерометра (так чтобы результаты измерений акселерометра могли быть представлены в осях координат, связанных с землей), чтобы оценить размер шага или шага, совершаемого обеими ногами.
Оценка границ шага.
Важно точно оценить границы шага (которые определяются как момент касания пяткой земли (HS), т.е. когда совершающая качательное движение нога снова касается земли, определяя начало фазы стойки), поскольку отсутствие границы приведет к существенной девиации значения параметра a, а значит к подаче сигнала тревоги.
Границы шага могут быть также использованы для оценки продолжительности шага, которая является другим параметром походки, и будучи объединенной с размером шага позволяет оценить скорость ходьбы, которую требуется определить.
Для акселерометров, которые жестко закреплены на верхней части тела пользователя, границы шага обычно находят, определив переход через «ноль» вертикального ускорения. Разумеется, следует понимать, что действительному «переходу» соответствует lg(9,81 мс-2), поскольку на пользователя всегда воздействует гравитационная сила. Вертикальное ускорение можно найти после определения ориентации акселерометра, хотя для жестко закрепленных акселерометров показания акселерометра вдоль координатной оси, соответствующей вертикальной, обеспечивают достаточное приближение.
Однако в предпочтительном варианте осуществления изобретения, в котором устройство 2 для предотвращения падения выполнено в виде подвески, устройство 2 для предотвращения падения (а значит и акселерометр 6) может свободно перемещаться относительно пользователя 4, а это означает, что система координат, связанная с акселерометром, также перемещается относительно пользователя 4.
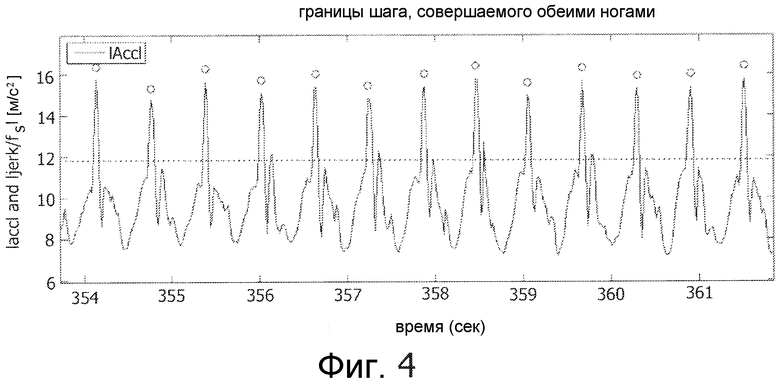
Следовательно, предпочтительно видоизменить детектирование границ шага (т.е. касания пяткой земли) следующим образом. Во-первых, вычисляется норма сигнала с акселерометра 6. Далее пики в этом сигнале служат маркерами границ для каждого шага, которые тесно связаны с касаниями пяткой земли (HS), как показано на Фиг. 4.
Пики находят, используя двухэтапную процедуру. Во-первых, идентифицируют так называемые кластеры. Во-вторых, максимальное значение в каждом кластере идентифицируется в качестве границы шага. Кластеры определяют как размах выборки, превышающей определенный порог (обычно превышающий ускорение свободного падения на 2 мс-2, т.е. ~12 мс-2), при этом допускается незначительный «пробел» в выборке, не преодолевший этот порог (обычно в 0,3 раза более продолжительности шага (которая составляет примерно 0,5 сек), т.е. 0,15 сек).
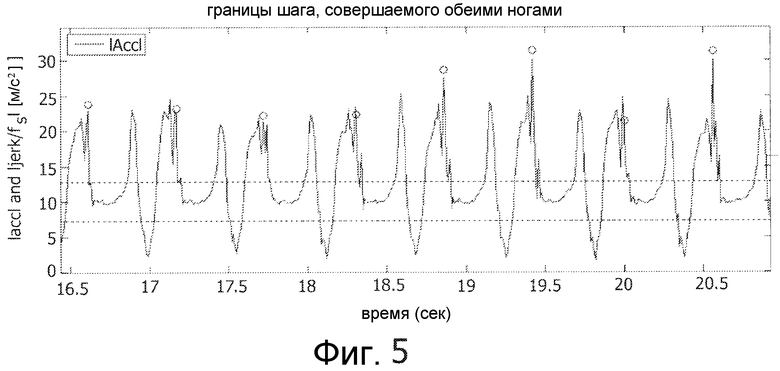
Данный алгоритм применим к акселерометрам 6, закрепленным на верхней части тела пользователя 4. Если акселерометр 6 крепится к нижней части тела пользователя 4 (например, к лодыжке), тогда обычно два кластера приходятся на один шаг или в действительности на один шаг, совершаемый обеими ногами, как показано на Фиг. 5. Поскольку сигнал акселерометра наблюдается на лодыжке, можно определить период шага, совершаемого обеими ногами (т.е. шага, совершаемого как левой, так и правой ногой).
Один кластер соответствует подъему ноги, а другой соответствует касанию пяткой земли. Возможны сложности с определением, который из этих двух относится к касанию пяткой земли. Однако можно также видеть, что на каждый шаг приходится единственный минимум, и это может быть использовано вместо детектирования границ шага.
На Фиг. 5 также показан другой способ идентификации кластеров. Вместо единичного порога (допускающего малый «пробел») используются два порога. Они привносят модель гистерезиса - преодоление одного порога указывает начало кластера, а падение ниже второго порога указывает конец кластера, при условии что результаты измерений оказываются ниже второго порога по истечении минимального периода времени после первого измерения в кластере. Предпочтительно минимальный отрезок времени получают из продолжительности шага, как описывалось выше.
Однозначно определенный минимум, показанный на Фиг. 5 для каждого шага, совершаемого обеими ногами, соответствует фазе переноса конечностей, при этом его не так удобно использовать в качестве границы шага. Вместо этого в качестве границы шага по ряду причин предпочтительно использовать касание пяткой земли. Во-первых, - это четко определенное событие. Во-вторых, при замерах, выполняемых на стопах или лодыжке, в момент касания пяткой земли скорость относительно земли равна нулю, что можно использовать при оценке движения. В-третьих, в момент касания пяткой земли ускорение по горизонтальной оси мало, что приводит к меньшим ошибкам при (двойном) интегрировании ускорения для оценки размера шага. Значение выборки в начале интегрирования оказывает большое влияние на конечный результат, так что высокие значения могут вызвать систематическую ошибку в конечном результате.
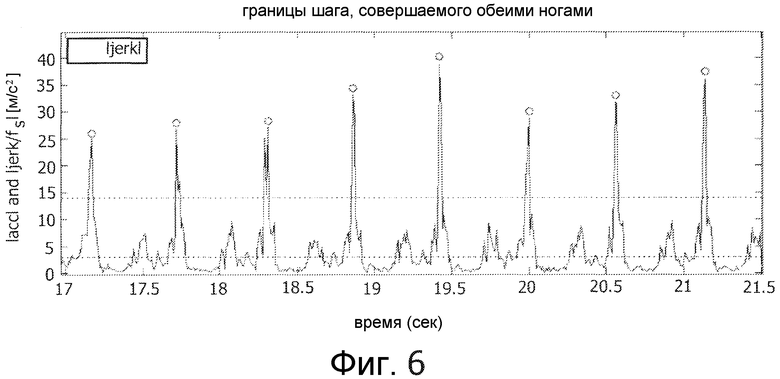
Более совершенный алгоритм для определения границ шага, когда акселерометр 6 расположен на нижней части тела пользователя 4, определяется нахождением производной ускорения, как показано на Фиг. 6. Границы более ясны, при этом они связаны с событием касания пяткой земли.
Следует понимать, что поскольку для различных местоположений устройства 2 для предотвращения падения на теле пользователя могут использоваться различные алгоритмы, процессор 12 в устройстве 2 для предотвращения падения должен распознать, какое местоположение используется. Пользователь 4 может иметь возможность выбора соответствующего местоположения из списка местоположений, предложенного процессором 12, или в альтернативном варианте процессор 12 может реализовать алгоритм-классификатор для определения местоположения (а значит алгоритма, который требуется использовать для определения границы шага) на основе определенных паттернов в измерениях акселерометра 6.
Оценка ориентации акселерометра.
Ориентация акселерометра 6 (а значит и устройства 2 для предотвращения падения) может быть оценена из направления действия гравитационной силы в системе координат акселерометра. Если z-ось принять за ось, соответствующую вертикальному направлению, когда акселерометр 6 не отклонен, ориентацию определяют путем скалярного произведения векторов, соответствующих измеренному направлению действия гравитационной силы и z-оси, т.е. посредством составляющей измеренной гравитационной силы по z-оси (как известно, если используются нормализованные значения, скалярное произведение определяется косинусом угла между двумя векторами).
Поскольку акселерометр 6 чувствителен как к ускорению, вызванному гравитационной силой, так и к ускорению, вызванному движением, требуется фильтр для оценки того, какая из составляющих вызвана гравитационной силой. Обычно гироскоп 10 добавляется для измерения скорости углового вращения и соответственно для корректировки измеренного ускорения. Однако если перемещения пользователя 4 не приводят к быстрым поворотам устройства 2 для предотвращения падения, от гироскопа 10 можно отказаться.
В отсутствие быстрых поворотов составляющая ускорения свободного падения может быть определена в виде составляющей сигнала с акселерометра 6, полученной фильтрацией нижних частот. Поскольку ограничения причинно-следственной связи в конструкции фильтра приводят к появлению задержки, подвергнутый фильтрации сигнал акселерометра требует корректировки с учетом такой задержки.
По измеренному направлению действия гравитационной силы можно оценить наклон или ориентацию устройства 2 для предотвращения падения. Однако такой наклон или такая ориентация устройства 2 для предотвращения падения не предоставляют информацию о горизонтальном направлении устройства 2 (в какую сторону обращено устройство 2), так что для горизонтальной ориентации устройства 2 может быть использован магнитометр 8. Гироскопы также могут быть использованы для оценки горизонтальной ориентации.
Ориентация может быть выражена различным образом, при этом чаще всего используются углы Эйлера и параметры Эйлера. Они обычно реализуются с помощью матриц и квантернионов. Алгебры являются изоморфными и обеспечивают преобразование измеренных значений (ускорения и т.д.), выраженных в локальной системе координат, связанной с акселерометром, в выраженные в глобальной (эйлеровой) системе координат.
Оценка размеров шага или шага, совершаемого обеими ногами.
Когда сигналы акселерометра представлены в системе координат, связанной с землей, размер шага может быть рассчитан путем двойного интегрирования (по времени) горизонтальной составляющей этих трансформированных сигналов. Пределы интегрирования задаются оцененными границами шага. Константы интегрирования, скорость и координата положения в начальный момент времени шага приняты равными нулю.
Для определения положения проблем не возникает, поскольку требуется знать размер шага, который представляет собой разность между координатами конечного и начального положений.
Если говорить о скорости, это будет верно в случае, когда устройство 2 расположено на ноге пользователя 4, поскольку при касании пяткой земли скорость относительно земли равна нулю. Однако когда устройство 2 расположено на верхней части тела пользователя 4, например, когда устройство 2 представляет собой подвеску, скорость будет близка к постоянной. Следовательно, принятие скорости, равной нулю, на каждой границе шага привнесет ошибки, поскольку постоянная скорость дает завышенную оценку размера шага. Однако если принять, что скорость постоянна в течение периода наблюдения, т.е. в течение периода осреднения (обычно примерно 10-12 шагов для определения a и примерно 30-60 секунд для определения µ), постоянной составляющей скорости можно пренебречь. Из этого следует, что размер шага можно оценить на основе изменения скорости, а это означает, что устройство 2 (и оцененный риск падения) становится независим от текущей скорости ходьбы - учитываются лишь девиации.
Размер p шага представляет собой интеграл от скорости v по продолжительности шага:

где HS0 и HS1 - моменты времени последовательных касаний пяткой земли (HS), а  и Δv обозначают среднюю скорость и ее девиацию соответственно.
и Δv обозначают среднюю скорость и ее девиацию соответственно.
Определив продолжительность шага как T=HS1-HS0= +ΔT, а p=
+ΔT, а p= +Δp, где
+Δp, где  , девиация размера шага выражается следующим образом:
, девиация размера шага выражается следующим образом:

Следует отметить, что по определению среднее значение (Δp)2 равно дисперсии p. Девиация скорости Δv может быть вычислена из измеренного ускорения следующим образом:

При постоянной скорости ходьбы

при этом разумно предположить, что Δv(HS0) имеет приблизительно одно и то же значение при каждом шаге. Тогда, пренебрегая первым членом вышеприведенного уравнения (4), Δp аппроксимируется следующим образом:

Второй член, Δs, представляет собой результат двойного интегрирования ускорения при нулевых константах интегрирования. Поскольку по определению E[Δp]=0, следует, что

Таким образом, можно получить аппроксимацию µ первого порядка посредством определения (горизонтального) ускорения в условиях устойчивого хождения и расчета среднего значения дважды проинтегрированного ускорения. Данная процедура также позволяет получить стандартную девиацию:

Таким образом, µ0 является оценкой - µ, при этом дисперсия p выражается следующим образом

В обычных случаях σ0 2«µ0 2, при этом var(p)≈2µ2. В процессе работы на протяжении нескольких шагов проводится оценка a=E[Δs] и сравнивается с µ0 относительно σ0, см. уравнение (1). Таким образом, хотя производится сравнение средних значений, они по существу отражают дисперсию размера шага.
Значения µ0 и σ0 являются зависимыми от пользователя и должны устанавливаться для каждого пользователя на этапе калибровки. Заметим, однако, что поскольку средняя скорость при оценке не учитывается, способ нечувствителен к действительной скорости хождения пользователя 4.
Первый член ΔT в вышеприведенном выражении для Δp отброшен и вносит ошибку. Он пропорционален средней скорости и девиации продолжительности шага. Для более точной оценки он может быть включен в оценку Δp.
Поскольку оценка ориентации содержит ошибки, в определении горизонтальных ускорений всегда присутствует гравитация в некоторой форме (т.е. горизонтальные ускорения включают в себя некоторый компонент, обусловленный гравитацией), при этом двойное интегрирование может порождать значительные ошибки при оценке размера шага. Один из способов подавления такого присутствия заключается в полосовой фильтрации (или фильтрации верхних частот) сигналов с акселерометра 6, предпочтительно с использованием линейно-фазового фильтра, так чтобы поддержать волновую форму сигнала. Типовые частоты отсечки составляют 0,1 Гц и 20-40 Гц (при этом действительное применение верхней частоты отсечки также зависит от используемой частоты выборки). Данная полосовая фильтрация не требуется.
Мера, которая оказалась особо эффективной, заключается в исключении тренда на интервале (шаге или шаге, совершаемом обеими ногами) интегрирования ускорения. Это сводится к требованию, чтобы среднее ускорение (с момента начала касания пяткой земли до момента завершения касания пяткой земли) было равно нулю. Другими словами, скорость после интегрирования равна скорости в начальный момент интегрирования (которая равна нулю). Ускорение с исключенным трендом получают путем вычитания проинтегрированного ускорения, поделенного на продолжительность шага, из измеренного ускорения. Ускорение с исключенным трендом используют для вычисления размера шага, как описано выше.
В предположении отсутствия ошибок в преобразовании системы координат, например, вызванных неоднородностью геомагнитного поля в отношении его направления и размера, данное интегрирование позволяет определить направление шага в понятиях север-юг и восток-запад. Однако для определения устойчивости походки необходимо исследовать движение в переднем и боковых направлениях. Эта задача решается следующим образом.
Начальное положение (которое по определению является исходным) и конечное положение рассчитываются по вышеописанной схеме. Различие между ними определяется 2D-вектором в горизонтальной плоскости. Далее определяется размер шага вперед в виде нормы этого 2D-вектора, т.е. в виде расстояния от начального положения до конечного положения (следует отметить, что, как следствие, вышеупомянутая величина Δp всегда положительна). Далее определяется прямая, проходящая между начальным положением и конечным положением, и определяется расстояние между этой прямой и каждой точкой, полученной из двойного интегрирования результатов измерений акселерометра в течение шага. Максимальное расстояние в этом ряду данных принимается за размер шага вбок.
Продолжительность шага определяется как отрезок времени между оцененными границами шага, а скорость - как отношение размера шага к продолжительности шага (в случае, когда устройство 2 расположено на ноге пользователя 4).
В то время как размеры шагов, совершаемых обеими ногами, вычисляются, когда устройство 2 находится на нижней части тела пользователя 4, размер шага может быть рассчитан, когда устройство 2 находится на верхней части тела пользователя 4, что вдвое быстрее среднего.
Специалистам в данной области техники ясно, что могут быть использованы альтернативные способы определения размера шага, которые не требуют двойного интегрирования замеренного горизонтального ускорения. Такие способы включают в себя использование модели обратного маятника [Zijlstra & Hof, Displacement of the pelvis during human walking, Gait and Posture 6, 1997, 249-267], а также корня 4-ой степени из разности между максимальным и минимальным вертикальным ускорением [Weinberg, Using the ADXL202 in Pedometer and Personal Navigation Applications, Applications Note AN-602, Analog Devices, 2002].
Хотя изобретение было описано на примере подвески, которую пользователь 4 должен носить на шее, следует понимать, что изобретение также может быть реализовано в альтернативных формах, предназначенных для ношения на различных частях тела пользователя 4. Разумеется, в таких вариантах осуществления необходимо изменить процедуру обработки данных, используемую для определения параметров походки по результатам измерений датчиков, однако такие изменения станут очевидны специалистам в данной области техники на основе вышеприведенного описания.
В варианте осуществления, описанном со ссылкой на Фиг. 2, получение и обработка результатов измерений датчиков выполняется в одиночном блоке. Однако в альтернативных вариантах осуществления обработка результатов измерений может выполняться в блоке, который удален от датчиков, и в этом случае устройство 2 для предотвращения падения будет содержать блок датчиков, который пользователь должен носить на себе, передающий результаты измерений на удаленный блок. В данном варианте осуществления нет необходимости в том, чтобы блок датчиков включал в себя специализированный процессор.
Таким образом, предложены способ и устройство, способные определить мгновенный риск падения пользователя.
Следует понимать, что вышеописанные алгоритмы, используемые для определения различных параметров походки, могут найти применение в других областях, помимо предотвращения падения. Например, они могут быть использованы для контроля физической деятельности и при занятиях фитнесом, например тренировки выносливости (в частности, для поддержания ритма при беге трусцой). Алгоритмы могут быть использованы в счетчиках шагов или устройствах, помогающих избежать травм, например в процессе бега трусцой. Кроме того, алгоритмы могут быть использованы в устройствах или системах, в которых параметры походки используются в качестве биометрических данных для идентификации личности.
Хотя изобретение было представлено и подробно описано на чертежах и в предшествующем описании, такое представление и описание следует рассматривать как иллюстративные или приведенные в качестве примера, а не ограничивающие; изобретение не ограничивается раскрытыми вариантами осуществления.
Специалисты в данной области техники смогут предложить и реализовать разновидности раскрытых вариантов осуществления, изучив чертежи, описание и прилагаемую формулу изобретения. В формуле изобретения термин «содержащий» не исключает существования других элементов или этапов, а единственное число не исключает множественного числа. Одиночный процессор или иной блок может выполнять функции нескольких элементов, приведенных в формуле изобретения. Тот факт, что определенные меры приведены во взаимоотличных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих мер не может быть использовано с выгодой. Компьютерная программа может храниться/быть распределенной на соответствующем носителе, таком как оптический носитель информации или твердотельный носитель, поставляемый совместно с другим аппаратным обеспечением или в виде его части, но может быть также распределена в других формах, например через интернет либо другие проводные или беспроводные телекоммуникационные системы. Ни одна из ссылочных позиций в формуле изобретения не должна рассматриваться как ограничивающая объем притязаний.


Изобретение относится к средствам контроля движения пользователя. Способ определения риска падения пользователя содержит этапы, на которых получают измерения движения пользователя, оценивают значение параметра, связанного с походкой пользователя по результатам измерений, и определяют риск падения пользователя по результатам сравнения оцененного значения с нормальным значением параметра, определенного из движения пользователя. Этап оценки содержит идентификацию границы шага в полученных измерениях путем идентификации кластеров результатов смежных измерений в полученных измерениях, в которых величина каждого из результатов измерений превышает порог, или путем идентификации кластеров результатов смежных измерений, кроме подмножества результатов измерений, величина которых меньше порога, при условии что подмножество охватывает период времени, меньший, чем пороговое время, или путем идентификации кластеров результатов смежных измерений, причем первый полученный результат измерений, величина которого превышает первый порог, обозначает первый результат измерений в кластере, а первый полученный результат измерений после первого результата измерений в кластере, размер которого оказывается ниже второго порога, обозначает последний результат измерений в кластере, при условии, что последнее измерение выполнено по истечении минимального периода после первого измерения. Устройство для предотвращения падения содержит, по меньшей мере, один датчик для получения измерений движения пользователя устройства и процессор для оценки значения параметра, выполненный с возможностью осуществления действий способа и снабженный машиночитаемым носителем. Использование изобретения позволяет определять мгновенный риск падения пользователя. 3 н. и 9 з.п. ф-лы, 6 ил.
1. Способ определения риска падения пользователя, при этом способ содержит этапы, на которых:
получают измерения движения пользователя;
оценивают значение параметра, связанного с походкой пользователя, по результатам измерений; и
определяют риск падения пользователя по результатам сравнения оцененного значения с нормальным значением параметра, определенного из движения пользователя, при котором пользователь подвержен нормальному риску падения;
при этом этап оценки содержит идентификацию границы шага в полученных измерениях путем:
(i) идентификации кластеров результатов смежных измерений в полученных измерениях, в которых величина каждого из результатов измерений превышает порог;
(ii) идентификации кластеров результатов смежных измерений в полученных измерениях, в которых величина каждого из результатов измерений превышает порог, кроме подмножества результатов измерений, величина которых меньше порога, при условии, что подмножество охватывает период времени, меньший, чем пороговое время; или
(iii) идентификации кластеров результатов смежных измерений в полученных измерениях, причем первый полученный результат измерений в полученных измерениях, величина которого превышает первый порог, обозначает первый результат измерений в кластере, при этом первый полученный результат измерений после первого результата измерений в кластере, размер которого оказывается ниже второго порога, обозначает последний результат измерений в кластере, при условии, что последнее измерение выполнено по истечении минимального периода после первого измерения.
2. Способ по п. 1, в котором этап определения риска падения содержит взвешивание результатов сравнения между оцененным значением и нормальным значением согласно стандартной девиации нормального значения.
3. Способ по п. 1 или 2, в котором оцененное значение определяют из движения пользователя в течение периода времени, меньшего, чем период времени, в течение которого определяется нормальное значение.
4. Способ по п. 1, в котором этап идентификации границ шага дополнительно содержит идентификацию границы шага в виде результата измерения в каждом кластере, имеющего наибольшую величину.
5. Способ по п. 1, в котором этап идентификации границ шага дополнительно содержит идентификацию границы шага в виде минимума между двумя последовательными идентифицированными кластерами.
6. Способ по п. 1 или 2, в котором параметр, связанный с походкой пользователя, содержит размер шага, при этом этап оценки значения параметра содержит интегрирование горизонтальных составляющих полученных измерений, причем пределы интегрирования задаются последовательными идентифицированными границами шага.
7. Способ по п. 6, в котором этап оценки значения параметра содержит вычисление двойного интегрирования по времени горизонтальных составляющих полученных измерений, связанных с ускорением, при этом константы интегрирования в начальный момент шага заданы равными нулю.
8. Способ по п. 1, в котором параметр, связанный с походкой пользователя, содержит, или дополнительно содержит, размер шага вперед, при этом этап оценки значения параметра содержит:
интегрирование горизонтальных составляющих полученных измерений, причем пределы интегрирования задаются последовательными идентифицированными границами шага, чтобы задать начальное и конечное положения для шага; и
определение размера шага вперед в виде нормы вектора, соединяющего начальное и конечное положения.
9. Способ по п. 7 или 8, в котором параметр, связанный с походкой пользователя, дополнительно содержит размер шага вбок, при этом этап оценки значения параметра дополнительно содержит:
определение прямой, проходящей между начальным и конечным положениями;
интегрирование полученных измерений, произошедших в течение выполнения шага, чтобы задать ряд положений в течение выполнения шага;
определение расстояния между каждым положением и прямой; и
определение размера шага вбок в виде максимального расстояния из этого ряда.
10. Способ по п. 1 или 2, дополнительно содержащий этап калибровки, который включает в себя:
получение измерений движения пользователя, когда пользователь подвержен нормальному риску падения; и
оценку нормального значения параметра, связанного с походкой пользователя, по результатам полученных измерений.
11. Устройство для предотвращения падения, содержащее:
по меньшей мере, один датчик для получения измерений движения пользователя устройства; и
процессор для оценки значения параметра, связанного с походкой пользователя, по результатам измерений и для определения риска падения пользователя по результатам сравнения оцененного значения со значением параметра, определенным из движения пользователя, при котором пользователь подвержен нормальному риску падения,
при этом процессор выполнен с возможностью оценки значения параметра, связанного с походкой пользователя, с помощью идентификации границы шага в полученных измерениях путем:
(i) идентификации кластеров результатов смежных измерений в полученных измерениях, в которых величина каждого из результатов измерений превышает порог;
(ii) идентификации кластеров результатов смежных измерений в полученных измерениях, в которых величина каждого из результатов измерений превышает порог, кроме подмножества результатов измерений, величина которых меньше порога, при условии, что подмножество охватывает период времени, меньший, чем пороговое время; или
(iii) идентификации кластеров результатов смежных измерений в полученных измерениях, причем первый полученный результат измерений в полученных измерениях, величина которого превышает первый порог, обозначает первый результат измерений в кластере, при этом первый полученный результат измерений после первого результата измерений в кластере, размер которого оказывается ниже второго порога, обозначает последний результат измерений в кластере, при условии, что последнее измерение выполнено по истечении минимального периода после первого измерения.
12. Машиночитаемый носитель, содержащий компьютерную программу, имеющую считываемый компьютером код, который, при исполнении на соответствующем компьютере или процессоре, выполнен с возможностью обеспечения выполнения компьютером или процессором этапов способа по любому из пп. 1 или 2.
| US 5919149 A, 06.07.1999 | |||
| US 2004015103 A1, 22.01.2004 | |||
| US 2005010139 A1, 13.01.2005 | |||
| US 2008146968 A1, 19.06.2008 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Optimal sensorimotor transformations for balance | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СТАТОКИНЕТИЧЕСКИХ РАЗДРАЖЕНИЙ | 1990 |
|
RU2008056C1 |
| Устройство для оценки вестибулярной сенсорной системы | 1985 |
|
SU1258380A1 |

